國
立
交
通
大
學
運 輸 科 技 與 管 理 學 系
碩 士 論 文
高速公路多車道車流模式之研究
A study of multilane highway traffic flow models
研 究 生:宋 威 廷
指導教授:卓 訓 榮
高速公路多車道車流模式之研究
研究生:宋威廷 指導教授:卓訓榮
國立交通大學運輸科技與管理學系碩士班
摘要
多車道路段由於可變換車道,其車輛行為與單車道時有所不同,故應以多車 道車流模式描述,而過去車流研究所建立的多車道車流模式多為波動方程式而鮮 少有探討多車道車流特性之曲線形狀。本研究透過台灣國道高速公路上之偵測器 蒐集實際車流資料,將不同車道數之車流資料繪製成車流特性關係圖並觀察其曲 線形狀,發現道路容量並不隨著車道數增加而等比例增加,但是道路壅塞時之流 量增加比例卻大於車道數的增加比例。此外,本研究以相鄰車道間速率會相互影 響的觀點,改寫 Drake、Schofer 和 May 的車流模式中之自由車由速率項,發展 一高速公路多車道車流速率與密度之關係曲線方程式,並使用平均絕對誤差百分 比(Mean absolutely percentage error, MAPE)做為模式績效指標。根據 Lewis(1982) 對此方法提供之建議尺度,本研究所建立之模式其 MAPE 在各種車道數下皆為 10%以下,是高精準的預測模式。A study of multilane highway traffic flow models
Student:Wei-Ting Sung Advisor:Hsun-Jung Cho
Department of Transportation Technology and Management
National Chiao Tung University
Abstract
This study presents a set of traffic flow models that account of operating effects among vehicles on multilane highways. It is known that the driver’s behavior and traffic characteristics on single-lane highways are fairly different from those on multilane ones. Many of the past studies have applied various wave equations to describe such traffic phenomena. This study explores the curve tendency, and their characteristics and associated parameters of each the traffic model that is proposed and calibrated from some freeway segments with different number of travel lanes. The actual traffic data are collected from a number of lane-based VDs along the National Taiwan Freeway. For two freeway segments with different lanes, the data analysis has shown that the rate of change in total capacity is not proportional to that in the number of lanes. When in congestion, however, the rate of increasing in congested flow is larger than that in the number of lanes. Plus, the free flow speed for a specific lane may be affected due to the side friction of traffic streams on the adjacent lanes. This study has modified the free-flow-speed term of the model proposed by Drake, Schofer, and May and developed a new speed-density relationship for multilane highways. The index of Mean Absolutely Percentage Error (MAPE) is used as the measure to check the fitness of each model to the associated actual data. Based on the scale suggested by Lewis in 1982, the MAPE value for each model with varied lanes is less than 10%. Hence, it is truly believed that the proposed traffic flow models can work with high accuracy.
Keywords: Highway traffic flow model, Multilane traffic flow model, Multilane
誌謝
在交大轉眼過了六年,一路走來首先最需要感謝的就是我的家人,在這些年 中一直在背後支持我、鼓勵我,沒有他們我將走不出人生中最陰霾的這幾年。還 有感謝健綸學長、黃恆學長、怡穎跟柏元,那些一起熬夜趕計畫與吃宵夜的日子 我將永銘於心,因為你們而使我的新竹生活在最後有了陽光,最後,也感謝卓老 師在這兩年間對我的照顧。對所有幫助過我、支持我、鼓勵我的朋友以及前輩, 我在這裡致上最誠摯的感謝。目錄
第一章 緒論... 1 1.1 研究動機 ... 1 1.2 研究目的 ... 1 1.3 研究範圍 ... 2 1.4 研究方法與流程 ... 2 第二章 文獻回顧... 4 2.1 單階段車流模式 ... 4 2.2 多階段車流模式 ... 8 2.3 巨觀車流波動方程模式 ... 11 2.4 小結 ... 12 第三章 實際資料分析... 13 3.1 單車道 ... 13 3.2 雙車道 ... 17 3.3 三車道 ... 21 3.4 四車道 ... 24 3.5 小結 ... 26 第四章 多車道車流模式建構與校估... 29 4.1 基礎模式選擇 ... 29 4.2 模式建構 ... 30 4.3 參數校估 ... 32 4.3.1 臨界車流速率 60(km/h) ... 33 4.3.2 臨界車流速率 65(km/h) ... 36 4.3.3 臨界車流速率 70(km/h) ... 37 4.4 模式驗證 ... 39 4.4.1 模式績效評估... 39 4.4.2 其他模式比較... 40 第五章 結論與建議... 45 5.1 結論 ... 45 5.2 建議 ... 45 參考文獻………..47圖目錄
圖 1.4-1 研究流程圖 ... 3 圖 2.1-1 Greenshields 的車流速率-密度圖 ... 5 圖 2.1-2 Greenshields 的車流速率-流量圖 ... 5 圖 2.1-3 Greenberg 的車流速率-密度圖 ... 6 圖 2.2-1 三種車流特性圖 ... 10 圖 3.1-1 N3-S-32.99 安坑隧道內照片 ... 14 圖 3.1-2 單車道車流速率-流率圖 ... 16 圖 3.1-3 單車道車流速率-密度圖 ... 16 圖 3.1-4 單車道流率-密度圖 ... 17 圖 3.2-1 N2-E-16.39 桃園內環線 ... 17 圖 3.2-2 雙車道車流速率-流率圖 ... 19 圖 3.2-3 雙車道車流速率-密度圖 ... 19 圖 3.2-4 雙車道流率-密度圖 ... 20 圖 3.3-1 N1-S-60.87 中壢市附近 ... 21 圖 3.3-2 三車道車流速率-流率圖 ... 22 圖 3.3-3 三車道車流速率-密度圖 ... 22 圖 3.3-4 三車道流率-密度圖 ... 23 圖 3.4-1 N3-N-43.67 土城附近 ... 24 圖 3.4-2 四車道車流速率-流率圖 ... 24 圖 3.4-3 四車道車流速率-密度圖 ... 25 圖 3.4-4 四車道流率-密度圖 ... 25 圖 3.5-1 各車道之車流速率-流率圖 ... 27 圖 3.5-2 各車道之車流速率-密度圖 ... 27 圖 3.5-3 各車道之流率-密度圖 ... 28 圖 4.1-1 不同模式比較圖 ... 29 圖 4.4.1-1 模式於不同車道數之績效比較 ... 40 圖 4.4.2-1 雙車道路段模式績效比較 ... 43 圖 4.4.2-2 三車道路段模式績效比較 ... 43 圖 4.4.2-3 四車道路段模式績效比較 ... 44表目錄
表 2.1-1 車流特性曲線之車流模式 ... 7 表 2.2-1 多階段車流模式公式 ... 9 表 4.1-1 模式參數表 ... 30 表 4.3.1-1 雙車道模式參數表 ... 34 表 4.3.1-2 三車道模式參數表 ... 34 表 4.3.1-3 四車道模式參數表 ... 35 表 4.3.2-1 雙車道模式參數表 ... 36 表 4.3.2-2 三車道模式參數表 ... 36 表 4.3.2-3 四車道模式參數表 ... 37 表 4.3.3-1 雙車道模式參數表 ... 37 表 4.3.3-2 三車道模式參數表 ... 38 表 4.3.3-3 四車道模式參數表 ... 38 表 4.4.1-1 MAPE 尺度說明表 ... 39 表 4.4.2-1 驗證雙車道模式所使用之參數 ... 41 表 4.4.2-2 驗證三車道模式所使用之參數 ... 41 表 4.4.2-3 驗證四車道模式所使用之參數 ... 42第一章
緒論
1.1 研究動機
著名的車流理論中,如 Greenshields 模式和 Greenberg 模式等,多以蒐集某 特定路段之單車道車流特性資料,畫出速率、流量與密度相互間之關係圖,並建 立數學公式描述其曲線。然而現今社會高、快速公路林立,其道路上之車道數經 常為雙車道、三車道亦或是四車道,在此多車道之道路狀況下,除了車輛間的跟 車行為與單車道時可能有所區別之外,更增加可變換車道的選擇。在這多車道、 車輛可進行變換車道行為的狀況下,過去所建立之車流模式是否仍能描述多車道 路況時之資料點曲線?興建高速公路時,以單一車道之容量乘以車道數作為總容 量是否與實際相符?後來學者針對多車道之車流模式進行研究,但多以波動方程 式進行研究,近幾年並無蒐集到文獻式針對車流特性曲線建立多車道車流模式。 因此,本研究將利用國道上架設之偵測器蒐集交通特性資料進行分析觀察,探討 多車道路段之車流速率、流量與密度彼此間的關係與單車道路況時有何異同,並 嘗試建立一符合台灣多車道高速公路之車流模式。1.2 研究目的
至今車流模式之研究大致可分為微觀與巨觀兩類。在微觀的觀點之下,著眼 於討論車輛與車輛彼此之車間時距、車間空距或是後車加速率等個體車輛的跟車 行為,然而個體車輛行為變異很大,經常有特例發生,所建立之跟車模式往往無 法完整的描述道路上真正的車輛跟車行為;在巨觀的觀點之下,則將整體車流視 為一連續流體,重點在於描述整體車流行為而不考慮個體車輛可能產生之特殊行 為。巨觀車流理論中有三個最為重要的車流特性,分別為流量、密度與速率,蒐 集這三種車流特性資料並將其兩兩繪製成關係圖,則成車流理論中最重要的三種車流特性曲線。以往研究欲繪製此三圖大多以單一車道之車流資料進行作業,同 時考慮多個車道的情況並無詳細記載。 因此,本研究之研究目的如下: 1. 分別依單車道、雙車道、三車道、四車道之高速公路車流資料,繪製三 種車流特性關係圖。 2. 探討所繪出之多車道車流特性關係圖與單車道車流之異同。 3. 透過車流特性關係圖,觀察高速公路容量與車道數是否呈等比例增加。 4. 建立高速公路多車道之車流特性曲線方程式。
1.3 研究範圍
本研究主要是針對直線或是平緩線型之高速公路多車道路段部分進行繪製 車流特性關係圖,並探討資料分析結果與過去研究有何不同。由於多車道路況時 車輛行為比單車道路況時多元,而這些相較於單車道所沒有之車輛行為反映在車 流特性上,繪製成關係圖後會造成圖中曲線如何變化?故本研究在於觀察不同車 道數所繪製出之車流特性關係圖並與單車道路況所繪之車流特性關係圖相互比 較,並根據觀察結果發展出高速公路多車道車流模式。1.4 研究方法與流程
本研究目的為了解傳統車流模式能否描述多車道車流之現象。首先,蒐集過 去著名之車流模式文獻,藉由回顧文獻了解當時建立車流模式的背景與假設,而 後透過國道高速公路車輛偵測器所蒐集之資料,將其分別繪成車流速率-流量圖 (speed-flow relationship)、車流速率-密度圖(speed-concentration relationship)、流量 -密度圖(flow-concentration relationship),探討實際資料所繪之圖形與傳統車流模 式之異同,並歸納整理以利發展一多車道車流模式。本研究之研究流程如圖所示: 確定研究主題 相關文獻回顧與探討 路段資料之收集 路段資料之繪圖與分析 建構多車道車流模式 模式驗證並與其他模式比較 結論與建議 圖 1.4-1 研究流程圖
第二章
文獻回顧
有關車流模式之研究最早可追朔至 1935 年 Greeenshields 所建立的線性車流 模式,而隨著交通問題日益嚴重,也越來越多學者加入研究車流問題。巨觀車流 理論中三個最重要的車流特性,分別為流量、密度與速率,有些研究以這三種特 性兩兩所繪製成之三種關係圖進行分析,即車流速率-流量圖(speed-flow relationship)、車流速率-密度圖(speed-concentration relationship)、流量-密度圖 (flow-concentration relationship);有些研究則是以物理、數學的角度對車流進行 建模。本章將分別對此兩大類蒐集文獻,回顧並了解車流模式之發展。2.1 單階段車流模式
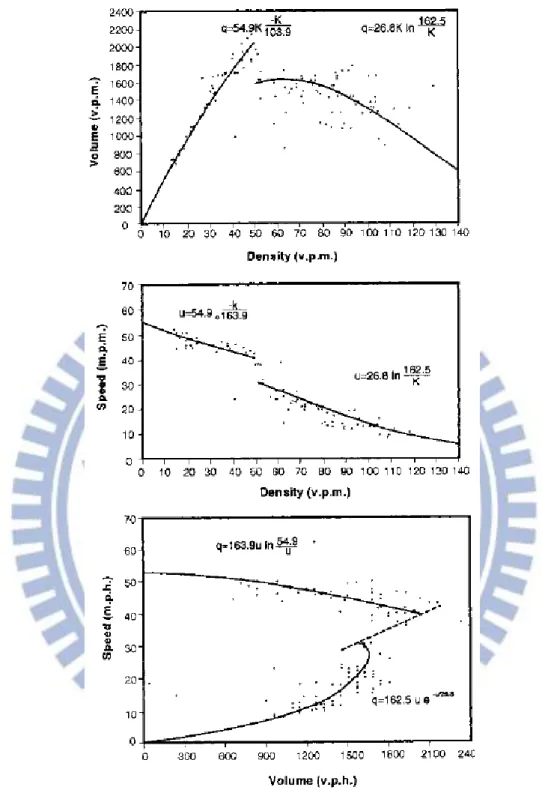
Greenshields(1935)所提出的線性模式為目前所知最早且相當著名,其式如 下: ) 1 ( j f k k u u (2-1) 其中u 為自由車流速率,f k 為車流擁塞時之密度。Greenshields 利用假日在郊區j 單車道之公路蒐集車流資料建立此速率與密度之關係式,資料如圖 2.1-1 所示, 因而 Greenshields 認為此關係圖既為線性,則有兩個資料點即可畫出。資料來源:Hall (1997) 根據 Greenshields 所提出的速率-密度線性關係式,可推導出速率-流量的拋 物線關係式,其式如下: ) ( 2 f j u u u k q (2-2) 其中u 為自由車流速率,f k 為車流壅塞時之密度。其形態為圖 2.1-2 所示。 j 圖 2.1-2 Greenshields 的車流速率-流量圖 資料來源:Hall (1997) 圖 2.1-1 Greenshields 的車流速率-密度圖
令一個著名的模式為 Greenberg(1959)所提出的對數關係式,其式如下: ) ln( k k u u o j (2-3) Greenberg 蒐集隧道中單車道之車流資料,如圖 2.1-3,他認為非線性的模式更貼 近於真實。而 Greenberg 所提出的這模式有一重要貢獻在於將巨觀模式與 General Motors 微觀的跟車模式連接在一起。 圖 2.1-3 Greenberg 的車流速率-密度圖 資料來源:Hall (1997) Underwood(1961)並不認同 Greenberg 模式中自由車流速率可以達到無限大 的想法,故針對自由車流速率時之速率-密度關係,重新建立以下關係式: o k k fe u u (2-4) 其中k 為道路達容量時之密度。 o
西北大學(Northwestern University)的 Drake、Schofer 以及 May (Drake, Schofer and May, 1967)觀察發現車流速率-密度關係曲線為 S 形狀,他們所提出之關係式 (簡稱為 D-S-M 模式)為: 2 2 1 ko k fe u u (2-5)
其中k 為道路達容量時之密度。 o Drew(1965)根據 Greenshields 模式延伸出之更為一般化的數學式: 2 1 1 n j f k k u u (2-6) 當n1時則此模式即為 Greenshields 模式。 Pipes-Munjal(1967)則再將上式寫成一單階段模式之通式,其數學式如下: n j f k k u u 1 (2-7) 與 Drew 的模式相同,當n1時即為 Greenshields 模式。 上述文獻可整理為下表: 表 2.1-1 車流特性曲線之車流模式 Greenshields(1935) 為 Greenshields 利用假日在郊區單車道之公 路蒐集車流資料建立之線性關係式,他認為 有兩個點即可畫出關係圖。 Greenberg(1959) Greenberg 蒐集隧道中單車道之車流資料建立 速度與密度之對數關係式。此模式使巨觀與 微觀車流模式有所連接,適用於高密度車流 而不是用於低密度車流。 Underwood(1961) Underwood 不認同 Greenberg 模式中自由車流 速率可以達到無限大的想法,故針對自由車 流速率時速率與密度關係重新建立指數關係 式,適用於低密度車流。
Drake, Schofer, May (D-S-M) (1967) 西北大學(Northwestern University)的研究團 隊 Drake 等人觀察發現車流速率-密度關係曲 線為翻轉的 S 形狀,另外提出一車流速率與 密度之關係式。 Drew(1965) Pipes-Munjal(1967) 使單階段車流模式更為一般化並寫成通式。 資料來源:May (1990)、Hall(1997)
2.2 多階段車流模式
Edie(1961)結合 Greenberg 與 Underwood 兩模式之優點,在車流尚未壅塞部 分使用 Underwood 模式,壅塞後之部分使用 Greenberg 模式。Drake 等人(1967) 利用在芝加哥所蒐集之實際資料,對包含 Greenshields、Greenberg、Edie 等人之 模式進行驗證,其中 Edie 模式轉換出來的流量-密度關係圖與車流速率-流量關係 圖最為符合實際資料(圖 2.2-1)。 西北大學研究團隊(Drake et al., 1967)另外提出三個多階段車流模式。首先是 以 Greenshields 模式為基礎,將未壅塞車流資料與壅塞車流資料分別校估發展為 兩階段車流模式;其次為改良 Greenberg 模式,在車流密度未達門檻值時車流速 率為定值,車流密度超過門檻值後才使用 Greenberg 模式的數學式;最後,同樣 是以 Greenshields 模式為基礎,發展出三階段車流模式,包含車流未壅塞階段、 車流轉換階段與車流壅塞階段。上述模式公式整理為下表。
表 2.2-1 多階段車流模式公式 多階段模式 車流未壅塞階段 車流轉換階段 車流壅塞階段 Edie(1961)
o
k k f k k e u u o -
o
j o k k k k u u ln 兩階段線性模式 (1967)
1 1 k k k k u u j f -
1
1 k k k k u u j f 改良 Greenberg 模 式(1967) 速率為定值
k k2
-
2
ln k k k k u u o j 三階段線性模式 (1967)
3 1 k k k k u u j f
4 3
1 k k k k k u u j f
3
1 k k k k u u j f i k :特定車流密度值,i=1,2,3,4 資料來源:May(1990)圖 2.2-1 三種車流特性圖
2.3 巨觀車流波動方程模式
Lighthill 與 Whitham(1955)所建立的 LW 模式是這類模式中最早的文獻。由 於 Richards 於 1956 年也獨立研究並發表同樣模式,故也稱 LWR 模式。此模式 是建立在不包含交流道之高速公路上,數學式如下:
0 , , x t x Q t t x (2-8)
x t
x tV x t Q , , , (2-9) Lighthill 與 Whitham 當時假設流量與密度是隨 x、t 變化的可微方程式,流量單 純是密度的函數且不小於 0,其中Qe為路段車流達均衡時之流量: 0 )) , ( ( ) , (x t Q x t Q e (2-10) 由於 LW 模式求解並不容易,而且有車速能瞬間變化等若干不合理之假設, Whitham(1974)提出將原本 LW 模式中流量的方程式改變並加入擴張項(diffusion term),解決 development of shock fronts 的問題,其修改後之流量數學式如下:
x D Q Q e (2-11) 其中 D 為一大於 0 的擴張常數。如此雖然能解決衝擊波(shock waves)的問題,但 仍無法解釋車輛走走停停時所發生之現象。 Payne(1971, 1979)對 LW 模式之連續方程式加入了動態速度公式進行補充。 其動態速度公式如下:
V x D V t x V V t V e 1 (2-12) 其中擴張係數
0.5
0 d dV D e ,Helbing(2001)提到此式中 x V V 屬於 transport or convection term,用以描述車輛在速度圖(velocity profile)上的走向;
t x D 為預期項(anticipation term)。表示駕駛人對周遭環境的反應,尤其是 駕駛人前方;
t V Ve 為放鬆項(relaxation term),描述平均速度 V(x,t)逐漸轉 為與密度相關之均衡速度。2.4 小結
上述所介紹之車流模式皆建立在車道數為單車道之情況下,並無考慮多車道 之影響,且部分研究所蒐集之車流資料是否在真正只有單車道的道路亦或是於多 車道之道路中取其一車道資料出來進行分析並無清楚說明,然而這些模式中有些 卻仍被後來的研究用於多車道路況。為了更好地描述真正的多車道車流,Gazia et al.(1962)、Manjal and Pipes(1971)等人將多車道車道間的變換率視為此車道密度 值與相鄰車道密度值的函數;Greenberg(2003)將各車道之密度與速度乘積相加成 為同一管線之密度與速度乘積,而這些多車道模式皆為波動方程式並非車流特性 關係之曲線方程式。本研究欲藉由實際資料探討車流速率-流量圖(speed-flow relationship)、車流速率-密度圖(speed-concentration relationship)、流量-密度圖 (flow-concentration relationship)在單車道時是否與過去研究相同?不同車道數所 繪製出來之三圖是否有所異同?並期望更進一步構建一符合多車道車輛行為之 車流關係曲線模式。
第三章 實際資料分析
本研究欲了解在不同車道數之情況下,透過路側偵測器蒐集而得之實際資料 所繪出車流速率-流率圖、車流速率-密度圖、流率-密度圖其圖形,並探討多車 到與單車道之圖形有何異同。故本章以國道高速公路上特定地點之車輛偵測器所 蒐集之資料,分別對車道數為單車道、雙車道、三車道以及四車道之路段進行繪 圖。3.1 單車道
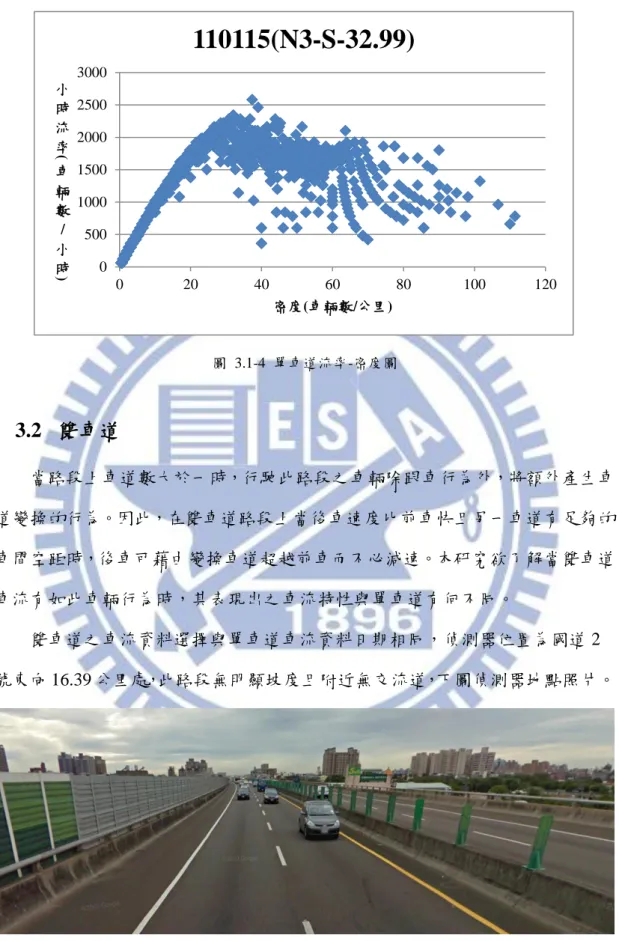
單車道路段與多車道路段最大的不同點在於行駛於此路段之車輛只有跟車 行為,後車無法透過合法的方式超越前車,而隧道內行駛之車輛亦無法變換車道 與此特性不謀而合,因此,儘管在國道高速公路上並沒有真正單一車道之道路, 隧道內由於其不可變換車道之特性仍可視為單一車道。 由於本研究期望能繪出車流非常壅塞時之狀況,故選擇日期時盡可能挑選假 日,預期因出遊車潮可能造成較為嚴重的塞車現象。因此,本研究取 2011 年 1 月 15 日全天國道 3 號南向 32.99 公里處偵測器所蒐集之車流資料進行單車道繪 圖。此路段資料位於隧道中最內側之車道,避免過多大型車輛以及聯結車輛的出 現,道路線型平緩且附近無交流道,下圖為偵測器地點照片。圖 3.1-1 N3-S-32.99 安坑隧道內照片 在利用偵測器資料繪圖前,必須先假設每分鐘通過偵測器之車輛其速率皆相 同,然後將每分鐘流量換算為小時流率,如此即可透過 Q=KV 換算出密度值並 繪出以下三圖(圖 3.1-1~圖 3.1-3)。在車流速率-流率圖中可觀察到當道路未壅塞 時,速率變動程度除了在流率極低時稍大外,隨著流率增加並無明顯變化,透過 數據資料得知圖中低流率之資料點出現在午夜至凌晨時間,可能由於車輛少導致 若干不遵守速限之駕駛人超速,而若干駕駛人在深夜較為疲倦為安全而放慢行車 速率,因此造成速率變動程度較大。觀察整體車流資料,車流速率在未達容量前 是隨著流率增加而緩慢降低,但是達到容量之後車流速率與流率皆下降且分布散 亂,直至速率下降至時速 20 公里以下才逐漸收斂。圖形中最右側道路容量點附 近曲線並不圓滑而類似於尖點且資料點極少,表示流率維持在容量的時間很短, 即使每一分鐘偵測一次車流資料也很難取得更多的資料點。 由車流速率-密度圖中可得到與上述相同之結果。在密度極低時車輛速率變 動程度較大,而隨著密度增加車輛速率變動程度也趨於一穩定區間且車輛速率逐 漸下降。仔細觀察可發現當速率降低到時速 60~70 公里左右斜率變得較大,這時 每增加一點密度所降低的速率較之前為多,也就是路段中增加每一輛車對速率都 有相當大的影響,車流速率-流率圖中預估之容量點其速率在時速 60~70 公里左 右,與車流速率-密度圖中此點不謀而合,故本研究估計此路段容量時之密度為
圖中曲線所對應的 30(車輛數/公里)左右。路段壅塞之後速率仍隨密度增加而下 降,但降到時速 20 公里左右後,隨著密度增加速率就無明顯變化而趨於平緩。 流率-密度圖中只有圖形左邊未壅塞部分能清楚看出流率與密度兩者同時逐 漸增加呈現正相關,然而圖形右側、密度超過 30(車輛數/公里)之後則呈散亂分 佈略為向右下延伸。透過此三圖可發現當路段未壅塞時車流較為穩定,其車流特 性容易預測;路段達到容量剛進入壅塞狀態時,車流變得相當不穩定而且車流特 性變異大導致預測相當困難,而後路段上之車輛數增加至足夠多時車流則會維持 穩定低速。
圖 3.1-2 單車道車流速率-流率圖 圖 3.1-3 單車道車流速率-密度圖 0 20 40 60 80 100 120 140 160 0 500 1000 1500 2000 2500 3000 速 率( 公 里 / 小 時) 小時流率(車輛數/小時)
110115(N3-S-32.99)
0 20 40 60 80 100 120 140 160 0 20 40 60 80 100 120 速 率( 公 里 / 小 時) 密度(車輛數/公里)110115(N3-S-32.99)
圖 3.1-4 單車道流率-密度圖
3.2 雙車道
當路段上車道數大於一時,行駛此路段之車輛除跟車行為外,將額外產生車 道變換的行為。因此,在雙車道路段上當後車速度比前車快且另一車道有足夠的 車間空距時,後車可藉由變換車道超越前車而不必減速。本研究欲了解當雙車道 車流有如此車輛行為時,其表現出之車流特性與單車道有何不同。 雙車道之車流資料選擇與單車道車流資料日期相同,偵測器位置為國道 2 號東向 16.39 公里處,此路段無明顯坡度且附近無交流道,下圖偵測器地點照片。 圖 3.2-1 N2-E-16.39 桃園內環線 0 500 1000 1500 2000 2500 3000 0 20 40 60 80 100 120 小 時 流 率( 車 輛 數 / 小 時) 密度(車輛數/公里)110115(N3-S-32.99)
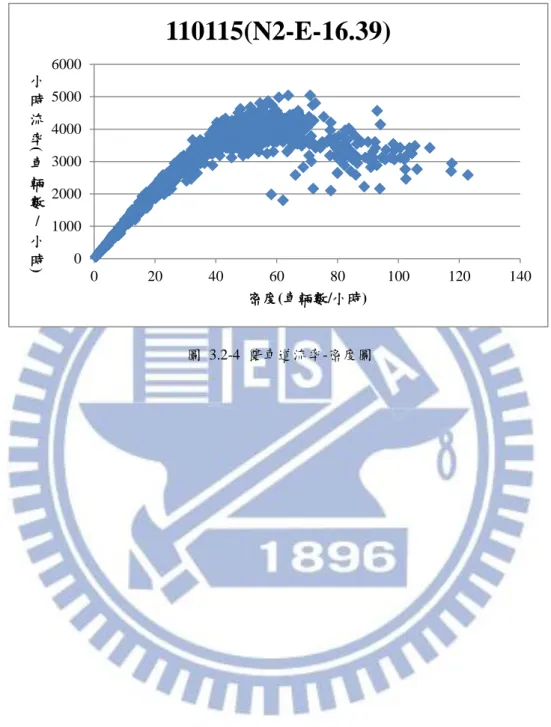
與單車道作相同假設,即每分鐘通過偵測器之車輛其速率皆相同,然後透過 相同方法算出密度值並繪出雙車道之車流特性圖(圖 3.2-1~圖 3.2-3)。在車流速率 -流率圖中可觀察到當道路未壅塞時,雙車道與單車道相似,隨著流率增加速率 並無明顯變化,而在時速 70 公里左右有大量資料點成團狀分布,本研究認為其 可能成因為此路段在車流量趨近於容量時車輛變換車道行為對於流率有相當大 的影響,但仍能維持不使速率驟降,然而一旦車流量再度增加,流率與速率與單 車道時類似,兩者同時降低使曲線往左下延伸。觀察整體車流資料,雙車道與單 車道趨勢差異並不大,車流速率皆在未達容量前是隨著流率增加而緩慢降低,但 是達到容量之後車流速率與流率皆下降直至速率下降至時速 30 公里左右才逐漸 收斂,較為不同之處在於雙車道路段所蒐集之車流資料表現出其車流維持在容量 左右的時間較長而低速時間較短。 從車流速率與密度之間的關係可以看出,在密度低時速率隨密度增加變化程 度並不明顯且變動程度維持在一穩定區間。整體曲線斜率平緩部分較單車道時為 長,而且無法明顯觀察到其斜率轉折點,透過在車流速率-流率圖中觀察而得之 預估容量也很難在車流速率-密度圖中得到支持。 流率-密度圖中曲線左邊未壅塞部分能清楚看出流率與密度兩者同時逐漸增 加呈現正相關,曲線右側、密度 60(車輛數/公里)之後則呈散亂分佈略為向右下 延伸。由於此雙車道路段之全天資料中有一時段車流處於容量狀態而並非迅速轉 入壅塞路況,故由此流率-密度曲線也可觀察到接近容量部分資料點變動程度較 曲線左側更大而未散亂。透過觀察此三圖可發現雙車道與單車道其全天之車流特 性趨勢並無顯著差異。
圖 3.2-2 雙車道車流速率-流率圖 圖 3.2-3 雙車道車流速率-密度圖 0 20 40 60 80 100 120 140 0 1000 2000 3000 4000 5000 6000 速 率( 公 里 / 小 時) 小時流率(車輛數/小時)
110115(N2-E-16.39)
0 20 40 60 80 100 120 140 0 20 40 60 80 100 120 140 速 率( 公 里 / 小 時) 密度(車輛數/公里)110115(N2-E-16.39)
圖 3.2-4 雙車道流率-密度圖 0 1000 2000 3000 4000 5000 6000 0 20 40 60 80 100 120 140 小 時 流 率( 車 輛 數 / 小 時) 密度(車輛數/小時)
110115(N2-E-16.39)
3.3 三車道
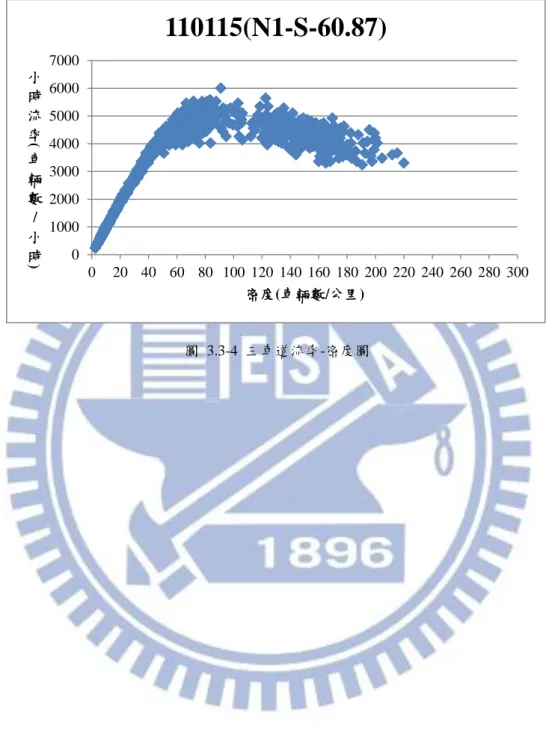
相較於雙車道,車輛行駛於三車道時更為自由,這也意味著車輛進行車道變 換的機會更多。與單車道及雙車道車流資料所選取的日期時間相同,偵測器位置 為國道 1 號南向 60.87 公里處(圖 3.3-1),此路段無明顯坡度且不包含交流道。同 樣必須先假設一分鐘內通過偵測器之車輛其速率皆相同,然後計算出密度值並會 成下列三車道之車流特性圖(圖 3.3-1~圖 3.3-3)。 圖 3.3-1 N1-S-60.87 中壢市附近 車流速率-流率曲線與前述兩種車道數相比類似,在未壅塞時隨流率增加速 率變化並不明顯而流率超過容量後則速率流率同時減少,但在時速 70 公里左右 資料點呈現團狀與壅塞後曲線並無向原點延伸太多皆更相似於雙車道。車流速率 -密度曲線形狀與單車道相比差異不大,而流率-密度圖除了與前兩種車道數相比 資料點較為集中,其曲線形狀並無太大差異。圖 3.3-2 三車道車流速率-流率圖 圖 3.3-3 三車道車流速率-密度圖 0 20 40 60 80 100 120 0 1000 2000 3000 4000 5000 6000 7000 速 率( 公 里 / 小 時) 小時流率(車輛數/小時)
110115(N1-S-60.87)
0 20 40 60 80 100 120 0 20 40 60 80 100 120 140 160 180 200 220 240 速 率( 公 里 / 小 時) 密度(車輛數/公里)110115(N1-S-60.87)
圖 3.3-4 三車道流率-密度圖 0 1000 2000 3000 4000 5000 6000 7000 0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 小 時 流 率( 車 輛 數 / 小 時) 密度(車輛數/公里)
110115(N1-S-60.87)
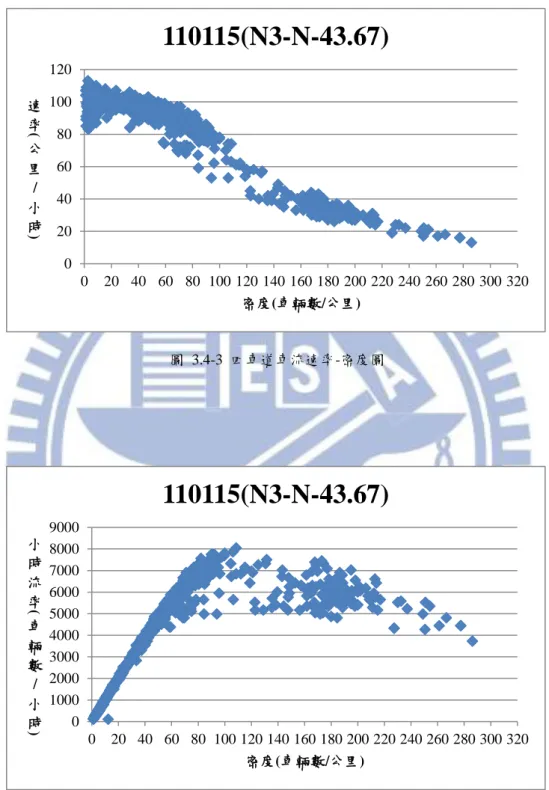
3.4 四車道
四車道車流資料選取的日期時間與前述三種車道數相同,偵測器位置為國道 3 號北向 43.67 公里處(圖 3.4-1),此路段無明顯坡度且不包含交流道。密度計算 方式與先前相同並繪製成下列四車道車流特性圖(圖 3.4-1~圖 3.4-3)。 圖 3.4-1 N3-N-43.67 土城附近 綜觀三圖,四車道車流特性曲線在接近容量部分資料點較為稀疏,表示路段 由未壅塞路況轉為壅塞路況時間短暫,以 1 分鐘為資料取得間隔仍舊無法取得太 多的資料點,不過整體曲線形狀與上述三種車道數相比並無顯著差異。 圖 3.4-2 四車道車流速率-流率圖 0 20 40 60 80 100 120 0 1000 2000 3000 4000 5000 6000 7000 8000 9000 速 率( 公 里 / 小 時) 小時流率(車輛數/小時)110115(N3-N-43.67)
圖 3.4-3 四車道車流速率-密度圖 圖 3.4-4 四車道流率-密度圖 0 20 40 60 80 100 120 0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 速 率( 公 里 / 小 時) 密度(車輛數/公里)
110115(N3-N-43.67)
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 小 時 流 率( 車 輛 數 / 小 時) 密度(車輛數/公里)110115(N3-N-43.67)
3.5 小結
本研究觀察不同車道數之實際資料繪製之車流特性圖後,發現曲線形狀部分 並不會因車道數不同而有明顯變化,然而將這四種不同車道數所繪製之車流特性 圖相疊比較仍能發現若干因素受車道數影響之現象。 圖 3.5-1~圖 3.5-3 中可發現,不同車道數下道路到達容量前車流速率隨流率 變動之程度極為類似。由各車道數相互重疊之流率-密度圖中也可以觀察到在車 流量未達道路容量前,無論車道數多寡其流率與密度曲線幾乎重疊;單車道曲線 最上端約為每小時 2500 輛左右而三車道曲線最上端很明顯並沒有達到每小時 7500 輛,表示隨著車道數增加道路容量並非等比例增加且可能單一車道可通過 之車輛數下降,但是,觀察道路已進入壅塞狀態時的右半曲線部分,車流量與車 道數幾乎為等比例增加,甚至增加的倍數略大於增加的車道數。本研究透過觀察 與分析上述現象,可得知車輛進行車道變換行為在車流量達容量前對整體車流影 響不並不明顯,而當車流量接近道路容量後,此時車輛速率不是最高但流量卻是 最大,表示車與車之間的距離很近,此時前車一旦減速會造成後車駕駛人緊跟著 減速,進而使整體車流速度很快地降低下來。多車道在接近容量時,儘管鄰近車 道車間空距不大,但仍有車輛會進行車道變換,一旦有車輛從原車道切換至其他 車道使得被切入車道之車輛減速,則上述現象將會發生使得多車道路段容量降低。 而多車道路段在壅塞時,由於此時車速不高,車輛變換車道造成其他車輛速度降 低對車流的影響變得很小,比起各車道之車輛皆不能變換車道,車輛能自由變換 至各車道的路段其車流量會略有提升。 因此,本研究欲建構一數學式作為多車道車流模式之主幹,再依據不同車道 數加入調整項以符合不同車道數之車流特性。圖 3.5-1 各車道之車流速率-流率圖 圖 3.5-2 各車道之車流速率-密度圖 0 20 40 60 80 100 120 140 160 0 1000 2000 3000 4000 5000 6000 7000 8000 9000 速 率( 公 里 / 小 時) 小時流率(veh/h)
110115(不同車道數)
單車道 雙車道 三車道 四車道 0 20 40 60 80 100 120 140 160 0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 速 率( 公 里 / 小 時) 密度(veh/km)110115(不同車道數)
單車道 雙車道 三車道 四車道圖 3.5-3 各車道之流率-密度圖 0 1000 2000 3000 4000 5000 6000 7000 8000 9000 0 50 100 150 200 250 300 350 小 時 流 率( 車 輛 數 / 小 時) 密度(veh/km)
110115(不同車道數)
單車道 雙車道 三車道 四車道第四章 多車道車流模式建構與校估
由文獻回顧可發現過去研究所建立之車流特性關係曲線模式皆為速率與密 度兩者之關係式,而本研究亦選擇多車道路況下之車流速率與密度關係建構符合 多車道車流特性曲線之模式。4.1 基礎模式選擇
經由第三章觀察實際車流資料繪圖可得知車流速率會隨著密度增加而降低, 然而其降低幅度會因車流處於不同密度而有所不同,在密度極低時或極高時,車 流速率幾乎不受密度影響;而曲線中間部分車流速率則隨密度增加有明顯降低。 下圖為使用國道 3 號南向 32.99 公里處之單車道車流資料代入若干單階段模式以 最小平方法進行比較,由圖 4.1-1 中可看出 D-S-M 模式其曲線形狀最為符合實際 資料點分布,而透過下表(表 4.1-1)中之殘差平方和數值也可發現 D-S-M 模式其 值最小,故本研究選擇以 Drake、Schofer 以及 May (1967)所建立之車流模式作為 主體,額外加入鄰近車道速率之影響項,試圖描述多車道之車流速率與密度關 係。 圖 4.1-1 不同模式比較圖 0 20 40 60 80 100 120 140 160 0 20 40 60 80 100 120 速 率( 公 里 / 小 時) 密度(veh/km)模式比較圖
Data D-S-M Greenshields Greenberg Underwood表 4.1-1 模式參數表 N3-S-32.99(單階段) 模式 車流參數 自由車流速率 (free-flow speed) (km/h) 臨界速率 (optimum speed) (km/h) 擁擠密度 (jam density) (veh/km) 臨界密度 (optimum density) (veh/km) 殘差平方和 (sum of squared residuals) D-S-M 100 - - 33.646 54142.55 Greenberg - 19.32 576.442 - 411906.50 Underwood 112 - - 48.027 103743.60 Greenshields 105 - 82.556 - 78863.40
4.2 模式建構
假設有 n 車道之高速公路直線路段,其中未包含交流道與坡度。本研究先 將各車道以 D-S-M 模式描述其車流速率與密度關係: 2 2 1 i o i k k i f i u e u (4-1) i=1,2,3,… n 若道路車道數為單車道時其車流速率與密度關係即為 D-S-M 模式;道路車 道數為雙車道以上時由於車輛可以進行車道變換,故路段上行駛於車道內之車輛 會受到鄰近車道車輛影響。本研究假設道路路段上各車道之自由車流速率會受鄰 近車道的車流速率影響,因此將 4-1 式中表示各車道之自由車流速率 i f u 改寫為 j o j i f u u u ,形成一新的速率項連結各車道與其鄰近車道。例如:在三車道路段中,內側車道車流速率會受中間車道車流速率之影響;中間車道車流速率同時受 到內側與外側車道車流速率影響;外側車道車流速率受到中間車道車流速率影響, 以數學式表達如下: Lane1: 2 1 1 2 1 2 2 1 1 ko k a o f e u u u u (4-2) Lane2: 2 2 2 2 1 3 3 1 1 2 2 ko k c o b o f e u u u u u u (4-3) Lane3: 2 3 3 2 1 2 2 3 3 ko k d o f e u u u u (4-4) 同時考慮上述三式則成三車道車流模式將此模式之車道數延伸至 n,令 j o j i f i m u u u u 可寫成通式如下: 2 2 1 i o i k k i m i u e u (4-5) 其中
j j o j i f i m j u u u u (4-6)
1, 1
1 ,... 3 , 2 i i j n i 當i1時 2 1 1 2 1 2 2 1 1 ko k o f e u u u u (4-7) 當i n時 2 2 1 1 1 n o n k k n o n n f n e u u u u (4-8)式中變數解釋如下: i u :第i車道之車流速率 i f u :第i車道之自由車流速率 j o u :第 j 車道之臨界車流速率 i k :第i車道之車流密度 i o k :第i車道之車流臨界密度 i 、、 :需校估之參數 本研究所建構之多車道車流模式即 4-5 式、4-6 式、4-7 式與 4-8 式,模式中 所加入之鄰近車道速率調整項,在次方參數為正的情況下會將車道流量未達容量 前之速率上調,當車道流量達容量後將速率下調;次方參數為負的情況下則情況 相反,此項將隨著鄰近車道速率變化而扮演摩擦折減項亦或是帶動加成項。
4.3 參數校估
本研究使用第三章之實際車流資料以最小平方法進行多車道模式校估,此模 式校估前必須先給定各車道之自由車流速率與臨界車流速率。欲計算車道之自由 車流速率可利用該車道全天速率資料,將超過設計速限 20%的資料刪除後,選取 前 15%速率資料平均而得;臨界車流速率為道路達容量時車流之速率,本研究經 過第三章之資料觀察分析,將各車道之臨界車流速率設定在時速 60~70 公里之間 且數值相同。本研究於後續模式校估過程將臨界車流速率分別以最小值時速 60 公里、中間值時速 65 公里與最大值時速 70 公里進行校估並比較。 本研究利用資料中各車道之車流密度代入模式中得該車道車流之預估速率, 之後藉由各車道車流之預估速率與實際車流速率差值可計算各車道車流速率之 殘差平方和,最後將各車道之殘差平方和加總即為本研究進行最小平方法欲最小化之目標值。軟體 MATLAB 具有容易操作之讀取 Excel 功能以及最小化未含限 制式函數之工具(fminunc-Unconstrained nonlinear minimization),符合本研究校估 參數之需要,故以 MATLAB(R2009a)求得模式參數。 單車道無臨界車流速率問題,透過上述計算方式而後給定自由車流速率為時 速 100 公里,並對下式進行模式校估: 2 2 1 ko k f e u u (4-9) 校估出之參數如下: uf :100(km/h) o k :33.646(veh/km) 從雙車道開始,在校估模式前除了必須先給定車道自由車流速率外,也必須 給定該車道的臨界車流速率。以下將以不同的臨界車流速率分別敘述校估出之參 數。
4.3.1 臨界車流速率 60(km/h)
雙車道(N2-E-16.39) Lane1 為最內側車道,其自由車流速率為時速 115 公里 Lane2 為外側車道, 其自由車流速率為時速 115 公里,欲校估之雙車道模式如下: Lane1: 2 1 1 1 2 1 2 2 1 1 ko k o f e u u u u (4-10) Lane2: 2 2 2 2 2 1 1 1 2 2 ko k o f e u u u u (4-11)校估後參數值: 表 4.3.1-1 雙車道模式參數表 參數值 1 2 1 o k (veh/km) 2 o k (veh/km) 殘差平方和 -0.051 -0.098 33.505 27.935 203155 三車道(N1-S-60.87) 最內側車道 Lane1 的自由車流速率為時速 108 公里,中間車道 Lane2 自由車 流速率為時速 100 公里,最外側車道 Lane3 自由車流速率為時速 93 公里,欲校 估之三車道模式如下: Lane1: 2 1 1 1 2 1 2 2 1 1 ko k o f e u u u u (4-12) Lane2: 2 2 2 3 2 2 1 3 3 1 1 2 2 ko k o o f e u u u u u u (4-13) Lane3: 2 3 3 4 2 1 2 2 3 3 ko k o f e u u u u (4-14) 校估後參數值: 表 4.3.1-2 三車道模式參數表 參數值 1 2 3 4 -0.055 -0.148 0.175 -0.1 參數值 1 o k (veh/km) 2 o k (veh/km) 3 o k (veh/km) 殘差平方和 27.6 30.776 29.394 183201
四車道(N3-N-43.67) Lane1 的自由車流速率為時速 113 公里,Lane2 自由車流速率為時速 106 公 里,Lane3 自由車流速率為時速 105 公里,Lane4 自由車流速率為時速 99 公里, 欲校估之四車道模式如下: Lane1: 2 1 1 1 2 1 2 2 1 1 ko k o f e u u u u (4-15) Lane2: 2 2 2 3 2 2 1 3 3 1 1 2 2 ko k o o f e u u u u u u (4-16) Lane3: 2 3 3 5 4 2 1 4 4 2 2 3 3 ko k o o f e u u u u u u (4-17) Lane4: 2 4 4 6 2 1 3 3 4 4 ko k o f e u u u u (4-18) 校估後參數值: 表 4.3.1-3 四車道模式參數表 參數值 1 2 3 4 5 6 -0.026 -0.001 -0.011 -0.051 -0.019 -0.109 參數值 1 o k (veh/km) 2 o k (veh/km) 3 o k (veh/km) 4 o k (veh/km) 殘差平方和 30.856 34.494 28.614 31.905 220661
4.3.2 臨界車流速率 65(km/h)
各車道數的給定條件與校估之數學式與前述相同。 雙車道(N2-E-16.39) 表 4.3.2-1 雙車道模式參數表 參數值 1 2 1 o k (veh/km) 2 o k (veh/km) 殘差平方和 -0.052 -0.11 31.813 26.902 205818 三車道(N1-S-60.87) 表 4.3.2-2 三車道模式參數表 參數值 1 2 3 4 -0.057 -0.172 0.224 -0.107 參數值 1 o k (veh/km) 2 o k (veh/km) 3 o k (veh/km) 殘差平方和 27.467 31.059 29.113 185665四車道(N3-N-43.67) 表 4.3.2-3 四車道模式參數表 參數值 1 2 3 4 5 6 -0.026 -0.015 0.008 -0.069 -0.005 -0.125 參數值 1 o k (veh/km) ko2(veh/km) 3 o k (veh/km) ko4(veh/km) 殘差平方和 29.593 31.856 27.808 29.832 223296
4.3.3 臨界車流速率 70(km/h)
各車道數其給定條件與校估之數學式與前述相同。 雙車道(N2-E-16.39) 表 4.3.3-1 雙車道模式參數表 參數值 1 2 1 o k (veh/km) 2 o k (veh/km) 殘差平方和 -0.051 -0.125 31.658 26.664 208926三車道(N1-S-60.87) 表 4.3.3-2 三車道模式參數表 參數值 1 2 3 4 -0.057 -0.194 0.287 -0.11 參數值 1 o k (veh/km) ko2(veh/km) 3 o k (veh/km) 殘差平方和 27.345 31.589 28.84 188114 四車道(N3-N-43.67) 表 4.3.3-3 四車道模式參數表 參數值 1 2 3 4 5 6 -0.026 -0.031 0.031 -0.092 0.014 -0.144 參數值 1 o k (veh/km) 2 o k (veh/km) 3 o k (veh/km) 4 o k (veh/km) 殘差平方和 29.473 31.763 27.541 29.413 226485 由校估出之各車道數臨界密度可以發現,多車道中一定有若干車道其臨界密 度低於單車道之臨界密度,這表示在道路到達容量時通過此路段之流量會比預期 少,符合第三章車流速率-流率圖中其曲線最右端之流率並不與車道數呈等比例 增加之現象。次方項整體數值很小,代表在最小化殘差平方和的情況下,以原始 的 D-S-M 模式所估計之速率很難藉由所乘上之調整項使殘差更為減少;其值為 負,表示本研究模式將道路達容量前之估計速率降低並把達容量後之估計速率調 高,本研究後續小節將討論如此調整是否使模式預測的結果更佳。
4.4 模式驗證
本研究選擇同一地點但時間為 2011 年 1 月 22 日之偵測器資料對雙車道以及 四車道之模式進行驗證 2011 年 2 月 14 日之偵測器資料對三車道模式進行驗證。
4.4.1 模式績效評估
本研究採取一般常用的評估指標平均絕對誤差百分比(Mean absolutely percentage error, MAPE)評估模式績效。MAPE 為相對比較數值,不受實際值與 估計值單位及數值大小的影響而能客觀地獲得實際值與估計值間相互差異程度, 其計算方式如下:
n t t t t A A F n M 1 % 100 (4-19) 其中 M :MAPE 值 t F :模式估計值 t A :實際值 Lewis(1982)對此方法提供一建議尺度(表 4.4-1)以利模式評估。由於臨界車 流速率時速 60 公里、時速 65 公里與時速 70 公里所校估出之參數差異不大且臨 界速率時速 60 公里時殘差平方和最小,本研究模式之驗證使用臨界車流速率為 時速 60 公里所校估之參數進行驗證。 表 4.4.1-1 MAPE 尺度說明表 MAPE 說明 % 10 高精準的預測 11%~20% 優良的預測 21%~50% 合理的預測 >50% 不準確的預測 資料來源:(Lewis 1982)圖 4.4.1-1 模式於不同車道數之績效比較 車道由內而外分別為車道編號 1 至 4 號,由上圖可得知本研究所建構之模式 為高精準的預測模式,其平均絕對誤差百分比皆在 10%以下。整體而言各車道速 率的平均絕對誤差百分比隨著總車道數的增加而減少,若以此績效指標做為參考, 本研究模式適合使用在較多車道之路段並有良好的表現。
4.4.2 其他模式比較
本研究從 4.1 小節作為模式建構基礎的方案中,選擇兩個殘差平方和最小的 模式進行比較。表 4.4-2 至表 4.4-4 為進行模式比較所使用之參數。本研究模式 參數為 4.3 小節校估而得之數值;D-S-M 模式與 Greenshields 模式是利用第三章 所分析之實際資料,將不同車道數中的各個車道車流密度帶入進行校估。 0% 2% 4% 6% 8% 10% 12% 14% 1 2 3 4 MAPE (%) 車道編號 雙車道 三車道 四車道表 4.4.2-1 驗證雙車道模式所使用之參數 車流參數 自由車流速率 (km/h) 臨界密度 (veh/km) 擁擠密度 (veh/km) 車道 1 2 1 2 1 2 Greenshields 116 115 - - 83.238 70.502 D-S-M 109 108 34.026 28.607 - - 本研究模式 115 115 33.505 27.935 - - 表 4.4.2-2 驗證三車道模式所使用之參數 車流參數 自由車流速率 (km/h) 臨界密度 (veh/km) 擁擠密度 (veh/km) 車道 1 2 3 1 2 3 1 2 3 Greenshields 110 105 94 - - - 68.543 73.234 73.922 D-S-M 103 97 87 28.955 31.125 31.893 - - - 本研究模式 108 100 93 27.600 30.776 29.894 - - -
表 4.4.2-3 驗證四車道模式所使用之參數 車流參數 自由車流速率 (km/h) 臨界密度 (veh/km) 擁擠密度 (veh/km) 車道 1 2 1 2 1 2 Greenshields 117 112 - - 77.842 80.720 D-S-M 110 105 30.696 32.590 - - 本研究模式 113 106 30.856 34.494 - - 車流參數 自由車流速率 (km/h) 臨界密度 (veh/km) 擁擠密度 (veh/km) 車道 3 4 3 4 3 4 Greenshields 108 99 - - 71.067 79.356 D-S-M 100 93 29.680 32.596 - - 本研究模式 105 99 28.614 31.905 - - 由下面三圖(圖 4.4-2~圖 4.4-4)可以發現三種模式平均絕對誤差百分比皆小 於 10%,同屬高精準預測模式,儘管如此,三者之中仍有優劣。圖中 Greenshields 模式的平均絕對誤差百分比較另外兩者高,原因為多車道時車流速率-密度關係 曲線並非完全直線而是具略微彎曲之曲線,因此使用線性模式來描述兩者關係則 績效會較不理想。本研究模式以多車道的觀點考慮鄰近車道車流對本車道車流的 影響,預估之結果績效值隨總車道數增加而降低,與 D-S-M 模式的預估績效相 比略低若干。從圖 4.4.2-2 與圖 4.4.2-3 中,本研究模式在三車道及四車道路段時 最外側車道之 MAPE 值略高,造成此結果的原因可能為外側車種較多速率變化 較大,因此平均誤差也大。另一方面,從模式參數來看,本研究模式與 D-S-M 模式在多車道時所校估出的臨界密度數值多比單車道時略小,符合第三章實際資 料分析之結果。整體而言,本研究模式對於多車道車流速率有良好的預估能力。
圖 4.4.2-1 雙車道路段模式績效比較 圖 4.4.2-2 三車道路段模式績效比較 0% 2% 4% 6% 8% 10% 12% 14% 1 2 MAPE (%) 車道編號 Greenshields Northwestern 本研究模式 0% 2% 4% 6% 8% 10% 12% 14% 1 2 3 MAPE (%) 車道編號 Greenshields Northwestern 本研究模式
圖 4.4.2-3 四車道路段模式績效比較 0% 2% 4% 6% 8% 10% 12% 14% 1 2 3 4 MAPE (%) 車道編號 Greenshields Northwestern 本研究模式
第五章 結論與建議
5.1 結論
1. 本研究以 D-S-M 模式為主體,考慮鄰近車道車流速率之影響改寫原始自由車 流速率成新的速率項,建構成為一描述車流速率與密度關係的多車道車流特 性曲線方程式。 2. 本研究預估車流速率模式加入有鄰近車道速率之影響,不同與以往車道速率 單純為密度的函數。 3. 透過觀察實際資料所繪成之車流速率-流率圖,發現道路容量並非隨車道數增 加而等比例增加,其所增加之倍數略小於車道數增加之倍數。 4. 透過觀察實際資料所繪成之小時流率-密度圖,發現壅塞路況時道路流量隨車 道數增加而增加,而且增加之倍數略大於車道數增加之倍數。 5. 本研究建構之模式所校估出各車道的臨界密度值落於實際資料繪圖所觀察到 之臨界密度區間。 6. 由校估出各車道之臨界密度可看出多車道時各車道的臨界密度比單車道時低, 符合於實際資料所觀察到之現象。 7. 以 MAPE 為績效指標,單階段車流模式一樣能精準的預測多車道車流速率。5.2 建議
1. 本研究並無考慮車種問題,然而小車之間的車輛行為與小車與大車、大車與 大車間並不會相同,故未來研究可在車流中加入不同車種探討其行為差異之 影響。 2. 本研究尚未考慮鄰近車道之車流密度,未來可以考慮同時將鄰近車道車流速率與車流密度的影響納入模式中。 3. 本研究以 D-S-M 模式為主體進行改動,未來可以保留本車道速率受鄰近車道 速率影響之觀念,將主體更換為其他模式亦或是每一車道之車流速率與密度 關係式皆不相同。 4. 本研究決定臨界車流速率的方法為直接觀察車流特性圖,未來研究可以發展 一較為細膩且具完整理論基礎的臨界車流速率計算方法並驗證績效。 5. 未來研究可選擇 MAPE 外的其他績效指標進行驗證。
參考文獻
1. Drake, J. S. , J. L. Schofer, and A. D. May (1967). A Statistical Analysis of Speed Density Hypotheses. In Third International Symposium on the Theory of Traffic Flow Proceedings, Elsevier North Holland, Inc., New York.
2. Drew, D. (1968). Traffic Flow Theory and Control, McGraw-Hill Book Company, pp.223-254.
3. Edie, L. C. (1961). Car Following and Steady-State Theory for Non-Congested Traffic. Operations Research, 9, pp. 66-76.
4. Gazis, D. C., R. Herman, G. H. Weiss, (1962). Density oscillations between lanes of a multilane highway. Operation Research vol. 10, pp.658-667.
5. Greenshields, B. D. (1935). A Study of Traffic Capacity. Highway Research Board Proceedings 14, pp. 448-477.
6. Greenberg, H. (1959). An Analysis of Traffic Flow. Operations Research, Vol 7, pp. 78-85.
7. Greenberg, J. M. , A. Klar, and M. Rascle (2003). Congestion of multilane highways. SIAM J. Appl. Math., Vol. 63 (3), pp. 818-833.
8. Hall, F. L. (1997). Traffic flow Theory: Charpter2, Traffic stream characteristics. Special Report 165: Revised Monograph on Traffic Flow Theory, Transportation Research Board, Washington, DC, FHWA.
9. Underwood, R. T. (1961). Speed, Volume, and Density Relationships: Quality and Theory of Traffic Flow. Yale Bureau of Highway Traffic, pp. 141-188, 10. Lighthill, M. J. , G. B. Whitham (1955). On Kinematic Waves. II. A Theory of
Traffic Flow on Long Crowded Roads. Proceedings of the Royal Society, London, Series A vol. 229(1178), 317-345.
guide to exponential smoothing and curve fitting (p. 305). London, Boston: Butterworth Scientific.
12. Manjal, P. K., L. A. Pipe, (1971). Propogation of on-ramp density perturbations on unidirectional two and three lane freeways. Transportation Research vol. 5, pp.241-255.
13. May, A. D. (1990). Traffic Flow Fundamentals, Prentice Hall, Englewood Cliffs, NJ
14. Pipes, L. A. (1967). Car-Following Models and the Fundamental Diagram of Road Traffic, Transportation Research, vol. 1, pp.21-29.
15. Richards, P. I. (1956). Shock waves on the highway. Operations Research vol.4, pp.42-51.