行政院國家科學委員會專題研究計畫 成果報告
橢圓型定子線性超音波馬達之研究
計畫類別: 個別型計畫 計畫編號: NSC93-2212-E-151-018- 執行期間: 93 年 08 月 01 日至 94 年 07 月 31 日 執行單位: 國立高雄應用科技大學機械工程系 計畫主持人: 何信宗 報告類型: 精簡報告 處理方式: 本計畫涉及專利或其他智慧財產權,2 年後可公開查詢中 華 民 國 94 年 8 月 19 日
行政院國家科學委員會補助專題研究計畫
■ 成 果 報 告
□期中進度報告
橢圓型定子線性超音波馬達之研究
計畫類別:■ 個別型計畫 □ 整合型計畫
計畫編號:NSC 93-2212-E-151-018-
執行期間: 93 年 8 月 1 日至 94 年 7 月 31 日
計畫主持人:何信宗
共同主持人:
計畫參與人員:倪薪富
成果報告類型(依經費核定清單規定繳交):■精簡報告 □完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、
列管計畫及下列情形者外,得立即公開查詢
■涉及專利或其他智慧財產權,□一年■二年後可公開查詢
執行單位:國立高雄應用科技大學
中 華 民 國 九十四 年 八 月 十八 日
橢圓型定子線性超音波馬達之研究
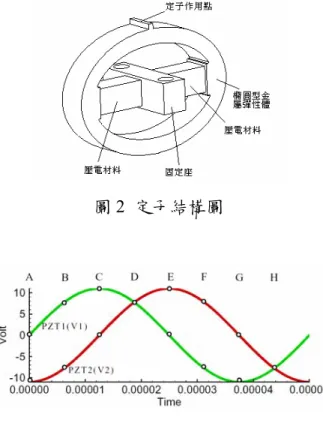
何信宗 國立高雄應用科技大學機械工程系助理教授 國科會計畫編號:NSC-93-2212-E-151-018 摘要 本研究的目的主要是探討橢圓型定子 線性超音波馬達的結構設計與動態特性, 首先介紹馬達之組成結構與動作原理,接 著建立馬達定子部份之數學模型,以實驗 值推得定子運動方程式之參數,並以所構 成之運動方程式模擬馬達定子的動態行 為。模擬分析的結果最後與實驗量測的結 果做比較,以驗證理論模型之正確性,模 擬與實驗結果相當吻合,足以說明本文中 理論分析的可靠度。另外,整個橢圓型定 子線性超音波馬達經設計製作組裝成超音 波馬達原型後,進行馬達動態特性的實驗 量測,性能如預期般良好。 關鍵字:超音波馬達,動態分析,線性馬達 1. 前言 自1980 年代以來,線性超音波馬達的 優異性能漸漸得到各界的認知,且有許多 研究針對各型超音波馬達熱烈的進行過, 對超音波馬達的特性得到相當的了解。如 今,增進超音波馬達的高效率化與結構設 計的簡單化已成為其實用化的重要工作。 以線性超音波馬達而言,已有相當數量的 研究資料被發表。在文獻[1,2]有對各型超音 波馬達的分類與動作原理的介紹,並針對 線性超音波馬達做一詳盡的文獻回顧。線 性超音波馬達較為著名的是以色列 Nanomotion 公司[3]的線性超音波馬達,這 型馬達採用長方體形狀之定子。Kazumasa 等人[4]則是使用兩個積層型壓電材料置於 π 型彈性體的兩個角落,製作了的π 型超音 波線性馬達。美國EDO 公司[5]所生產的線 性超音波馬達使用兩個積層型壓電材料, 並在兩個壓電材料間加上一個彈性體當成 力量轉換元件,當兩個壓電材料分別輸入 具有90o相位差的正弦電壓源時,使連接在 壓電材料間的彈性體與滑台接觸的作用點 產生橢圓形運動軌跡,並且推動滑台移 動。James R.等人[6]將積層型壓電材料置入 一音叉形狀的彈性體當中,構成馬達定子 的構造,製作了新型線性超音波馬達。本 研究參酌前列參考文獻之後,以橢圓型定 子線性超音波馬達作為研究對象,根據定 子尺寸形狀與振動模態的關係探討,設計 製作出馬達定子的原型,之後逐步建立其 它各組成元件的結構,完成整個馬達系統。 超音波馬達為達到無噪音的效果,必 須將馬達定子的驅動頻率盡可能的提高, 當頻率高至人耳的不感帶,即 20kHz 以上 之超音波頻域時,就能免除噪音的困擾。 橢圓型定子有一個特性就是構成橢圓型運 動軌跡的兩個振動模態之頻率調整與定子 幾何外型相關,經幾何外型調整後可使互 相呈正交運動的兩個振動模態調整為相近 的自然頻率,當壓電材料各別施以相差90o 相位差之正弦波電壓時,即可達成橢圓型 運動軌跡。另一個特性就是當把橢圓型定 子的幾何形狀固定且依等比例縮小時,其 自然頻率便可提高,簡單容易不受太多製 作上的限制,因此本研究並未在定子自然 頻率的高低上做積極的討論,僅著眼於幾 何形狀的設計。 2. 橢圓型定子超音波馬達之結構設計 2.1 馬達結構設計 圖1 為本研究所製作之超音波馬達的 基本結構圖,主要由滑台組、馬達基座、 定子與支撐結構所組成。其中,滑台組是由滑台座、滑台與耐磨材料所構成,其功 能主要是使馬達能夠達到左右來回的線性 運動,而耐磨材料是防止滑台在馬達動作 時因摩擦作用所產生的磨損,而馬達底座 是要將各馬達零件組安置定位以確保各組 件能夠在其指定位置上。 在整個馬達中最重要的是定子部分, 可說是整個馬達的核心所在,只要定子設 計的好馬達性能就相對的提升,圖2 為馬 達定子的結構圖,定子結構主要是由兩個 積層型壓電材料、橢圓型金屬彈性體與固 定座所組合而成。圖中固定座是要固定壓 電材料的邊界,使壓電材料只能作用在橢 圓型金屬彈性體上,而壓電材料的主要功 能是當有正弦電壓源輸入至壓電材料時, 會使壓電材料在縱長方向產生一個正弦波 的變形,並且去激發出橢圓型金屬彈性體 的作用點上產一個橢圓型的運動軌跡。 在馬達支撐結構上主要是由支撐座、 滑台、彈簧、彈簧導引桿與彈簧檔板所構 成,而支撐座主要目定是要將定子固定於 其上面以限制其定子的運動行為,並且提 供一個正向壓力使定子能夠適當的緊壓在 滑台上。而滑軌、彈簧、彈簧導引桿與彈 簧檔板主要就是讓整個馬達的預壓系統方 面是可以調整,以方便目前在實驗階段中 可以探討預壓改變時其馬達特性的變化。 對整個馬達而言,當輸入正弦電壓源 給壓電材料時,會使壓電材料產生縱向的 正弦振動變形,進而激發定子作用點產生 一個橢圓形運動軌跡,並且由支撐結構上 的預壓系統提供一個適當的正向壓力,即 可使定子能夠藉由摩擦力去驅動滑台移 動,當改變輸入電源信號間的相位差就能 使滑台往反方向移動。 2.2 馬達驅動原理 在本研究中,馬達定子是使用兩個壓 電材料同時當成定子的振動激發源,因為 是藉由輸入兩個具有90o相位差的正弦電 壓源(V1 與 V2)作為壓電材料的輸入驅動 電壓源,所以會使定子橢圓型彈性體上的 作用點產生橢圓型運動軌跡。由圖3 與圖 4 可以說明此型定子的動作原理,從動作分 解圖來說明壓電材料所輸入的電壓源與橢 圓型彈性體的變形關係。 當輸入如圖3 中的 A 點電壓位置時, 會使圖4 中的 A 圖上的 PZT2 縮短,而 PZT1 無動作,所以定子的作用點往左上動作。 當輸入如圖3 中的 B 點電壓位置時,會使 圖4 中的 B 圖上的 PZT1 與 PZT2 同時縮 短,所以定子的作用點往上動作。當輸入 如圖3 中的 C 點電壓位置時,會使圖 4 中 的C 圖上的 PZT1 縮短,而 PZT2 無動作, 所以定子的作用點往右上動作。當輸入如 圖3 中的 D 點電壓位置時,會使圖 4 中的 D 圖上的 PZT1 縮短,而 PZT2 伸長,所以 定子的作用點往右動作。當輸入如圖3 中 的E 點電壓位置時,會使圖 4 中的 E 圖上 的PZT2 伸長,而 PZT1 無動作,所以定子 的作用點往右下動作。當輸入如圖3 中的 F 點電壓位置時,會使圖4 中的 F 圖上的 PZT1 與 PZT2 同時伸長,所以定子的作用 點往下動作。當輸入如圖3 中的 G 點電壓 位置時,會使圖4 中的 G 圖上的 PZT1 伸 長,PZT2 無動作所以定子的作用點往左下 動作。當輸入如圖3 中的 H 點電壓位置時, 會使圖4 中的 H 圖上的 PZT1 伸長,PZT2 縮短所以定子的作用點往往左移動,所以 經過一個正弦週期後其橢圓型彈性體上的 作用點即會構成一個橢圓型的運動軌跡。 圖1 橢圓型定子超音波馬達結構圖
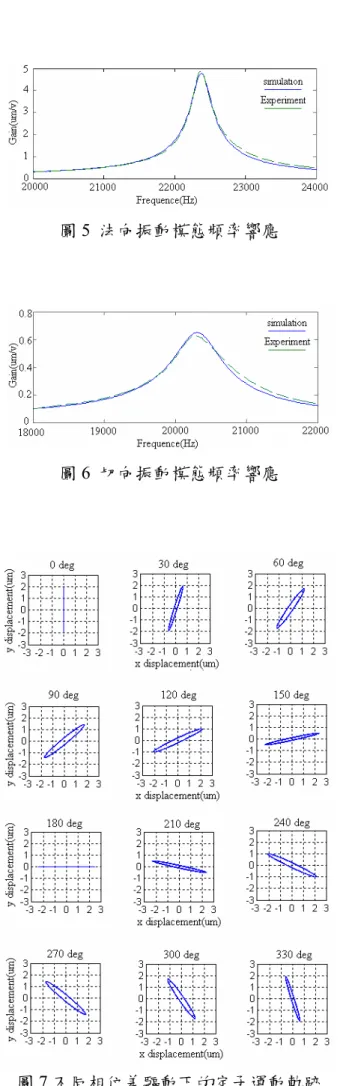
圖2 定子結構圖 圖3 壓電材料的驅動電壓信號 圖4 定子變形運動之動作分解圖 3. 理論分析與模擬 3.1 定子之運動方程式 為了描述定子作用點處的二維運動行 為,可以兩個振動系統的關係表示之。定 子作用點的切線方向位移量x由於與定子 切向振動模態為相依關係與法向振動模態 為獨立關係,因此可由輸入電壓v1、v2與 切向振動模態的作用點輸出位移x之間的 關係,得到如(1)式之切向振動方程式。 2 1 Av v A x k x c x mt &&t + &t t + t t = t − t (1) 其中,m 、t c 與t k 各為定子作用點上切向t 的等效質量、等效阻尼係數與等效彈性係 數,A 則為系統的切向力係數。另外,定t 子作用點的法線方向位移量y 由於與定子 法向振動模態為相依關係與切向振動模態 為獨立關係,因此可由輸入電壓v1、v2與 法向振動模態的作用點輸出位移y 之間的 關係,得到如(2)式之法向振動方程式。 2 1 A v v A y k y c y mf &&f + f &f + f f = f + f (2) 其中,mf 、cf與kf 各為定子作用點上法 向的等效質量、等效阻尼係數與等效彈性 係數,Af 則為系統的法向力係數。 切向振動方程式與法向振動方程式中 的各項係數若能經由分析得到或是由實驗 方式得到,即可建立充份描述馬達定子的 數學模型。 表1 馬達定子系統參數 法向振動模 態 切向振動模 態 自然頻率 22.5 20.4 等效質量 0.002 0.0025 等效阻尼 3.6499 10.5624 等效彈性係數 3.95466*109 4.0727*109 法向力係數 11 0.57 3.2 定子之頻率響應與運動軌激 圖 5 與圖 6 所示各別為馬達定子的作 用點上法向與切向的頻率響應,經過表 1 中的系統參數計算所模擬得到的模擬值與 實驗值比較後,可以由圖中看出採用此方 法的妥當性。 圖7 所示為驅動電壓頻率為 20.5 kHz 時,當電壓V1與V2之間的相位差從0 度變 化至330 度,其定子作用點上所對應的運 動軌跡模擬。圖中所示當改變V1與V2間的 相位差時會使定子作用點上橢圓形運動軌 跡的斜率改變。圖8 所示為使用單輸入驅 動型式的定子運動軌跡模擬,當驅動頻率 固定在20.5 kHz 時,隨著驅動電壓的變化, 可以看到定子作用點的運動軌跡隨之變 大。
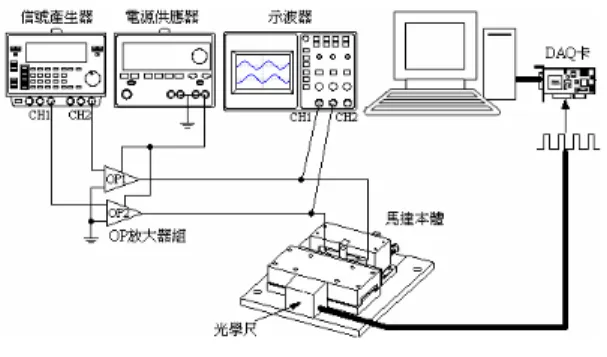
圖5 法向振動模態頻率響應 圖6 切向振動模態頻率響應 圖7 不同相位差驅動下的定子運動軌跡 圖8 不同電壓大小時運動軌跡 4. 實驗與討論 4.1 實驗佈置 實驗目的主要是對所設計出來的馬達 定子與馬達做一實驗量測,包含頻率域與 時間域的兩種實驗量測。在頻率域的量測 方面,主要是量測馬達定子的法向振動模 態與切向振動模態的頻率響應。而在時間 域的量測方面,主要針對馬達定子與滑軌 接觸的作用點做運動軌跡量測,最後並對 馬達整體性能做性能量測實驗。 圖 9 所示為實驗所用之橢圓型定子線 性超音波馬達的照片,圖10 所示則為量測 馬達位移對時間變化時之實驗佈置圖,以 解析度20µm 之光學尺透過美商 NI 公司之 DAQ 介面卡,以 LabView 程式擷取實驗數 據。 圖9 橢圓型定子線性超音波馬達原型
圖10 馬達位移量測實驗佈置 4.2 定子動態量測 在量測馬達定子的動態特性時均將馬 達定子取出並且固定於防振桌上進行量測 以避免外界的干擾振動源而影響實驗結 果,使用非接觸式的都卜勒位移計量測出 馬達定子的法、切向振動模態頻率響應與 定子作用點上的運動軌跡。此感測器的解 析度可達到數個nm,已能夠滿足本研究的 實驗要求。圖11 不同相位差驅動下的定子 運動軌跡。圖12(a)與圖 12(b)中所示,各別 是馬達左移運動與右移運動時橢圓型定子 的運動軌跡實驗數據。由圖中可以看出, 定子在低電壓到較高電壓驅動時,不僅運 動軌跡會增大外,橢圓型軌跡也會呈現傾 斜角度小幅度變化的非線性現象。 圖11 不同相位差驅動下的定子運動軌跡 x displacement(um/V) y d is p lac em en t( u m /V ) -4 -3 -2 -1 0 1 2 3 4 -4 -2 0 2 4 x displacement(um/V) y d is p lac em en t( um /V ) -4 -3 -2 -1 0 1 2 3 4 -4 -2 0 2 4 (a)馬達左移運動軌跡(b)馬達右移運動軌跡 圖12 馬達定子運動軌跡圖 4.3 馬達運動特性 馬達性能量測的實驗佈置如圖 10 所 示,除了驅動電路外,另外包含由馬達定 子、滑軌、預壓結構與馬達平台所構成的 線性馬達所組成外,並且使用非接觸式的 光學尺去量測出當馬達運轉時其位移與時 間的關係曲線。圖 13 與圖 14 為馬達右移 與左移時,位移與時間之關係圖。圖15 與 圖16 為馬達右移與左移時,位移與時間之 關係圖。這些實驗數據顯示此型線性超音 波馬達之性能能夠符合共業界之需求,具 有實用化之價值。 Time d ispl ace me nt (m m ) 0 0.1 0.2 0.3 0.4 0.5 0.6 0 10 20 30 40 圖13 馬達右移時位移與時間之關係圖 Time d isp la ce me n t( mm) 0 0.1 0.2 0.3 0.4 0.5 0.6 0 10 20 30 40 圖14 馬達左移時位移與時間之關係圖
Time Ve lo cit y(m /s ) 0 0.01 0.02 0.03 0.04 0 0.05 0.1 0.15 0.2 圖15 馬達右移時移動速度與時間之關係圖 Time Ve loc ity( m /s ) 0 0.01 0.02 0.03 0.04 0 0.05 0.1 0.15 0.2 圖16 馬達左移時移動速度與時間之關係圖 5. 結論 在本研究之超音波馬達系統模擬分析 中,主要是打算將馬達系統分成馬達定子 的數學模型、定子作用點與滑台相接觸間 的接觸層數學模型和滑台運動的數學模型 等三部份,逐步建立馬達系統的整體模 型。其中,在定子運動軌跡模擬方面,主 要以實驗量測所得到的定子法、切向振動 模態頻率響應數據求得定子作用點之二維 運動振動方程式,並藉由這兩個振動方程 式模擬出馬達定子在作用點上之二維運動 軌跡。根據所建立的定子模型,可在調整 輸入電壓與相位差的方式下模擬出相對應 的定子運動軌跡。在馬達輸出性能量測 上,透過不同驅動電壓下,量測馬達輸出 位移與速度之暫態響應。這些實驗數據都 顯示出此型超音波馬達的性能符合產業需 要。 從本研究所施行的實驗中得知,在定 子與整個馬達的電壓驅動時會有非線性現 象的發生,因此當改變定子的驅動電壓大 小時,會使法、切向共振頻率與相位值產 生輕微變化,進而影響到馬達的整體性 能,這些非線性現象將是日後提升橢圓型 定子超音波馬達時,所必須解決的問題。 7. 參考文獻 1. K. Uchino, 1998, “Piezoelectric
Ultrasonic Motor: Overview”, Smart Mater-Struct, vol. 7, pp.273-285
2. T. Hemsel, J. Wallaschek, 2000, ”Survey
of the Present State of the Art of Piezoelectric Linear Motors", Ultrasonics, vol. 38, pp.37-40.
3. U.S. Patent 5453653.
4. O. Kazumasa, 1992, “A novel ultrasonic
linear actuator”, IEEE 7 Int Symp Appl Ferroelectr, pp.206-212.
5. U.S. Patent 4622483.
6. J.R. Friend, J. Satonobu, K. Nakamura, S.
Ueha, D.S. Stutts, 2003, “A single-element tuning fork piezoelectric linear actuator”, IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, vol 50, pp. 179-186, Feb.
可供推廣之研發成果資料表
■ 可申請專利 ■ 可技術移轉 日期:94 年 8 月 18 日國科會補助計畫
計畫名稱:橢圓型定子線性超音波馬達之研究 計畫主持人:何信宗 計畫編號:NSC 93-2212-E-151-018 學門領域:自動化元件技術技術/創作名稱
橢圓型定子線性超音波馬達發明人/創作人
何信宗 中文: 橢圓型定子線性馬達之原型已在本研究中開發出來。另外, 為了充分掌握這個馬達得動態特性,建立了馬達的數學模型,可用 來模擬馬達與定子的暫態響應與穩態響應。模擬分析結果與實驗量 測結果比對後,已證明其正確性,經由這個數學模型的使用,我們 對於此型馬達的設計得到了相當有用的指引。技術說明
英文:A prototype for the ultrasonic linear with elliptical stator has been developed in this study. Also, a model was developed to predict transient and steady-state response for the elliptical stator type
ultrasonic motors and the simulation results were validated by experiments. The theoretical and experimental results are in good agreement. Based on the model, a lot of useful guidelines were developed for designing this type of motors.