國
立
交
通
大
學
土木工程學系
碩士論文
倒傳遞網路應用於油氣儲集層亮點偵測
Detection of Oil Reservoir Bright Spot Using Back-propagation
研 究 生:詹世偉
指導教授:曾仁杰 博士
倒傳遞網路應用於油氣儲集層亮點偵測
Detection of Oil Reservoir Bright Spot Using Back-propagation
研 究 生:詹世偉 Student:Shih-Wei Chan
指導教授:曾仁杰 Advisor:Ren-Jye Dzeng
國 立 交 通 大 學
土木工程學系
碩 士 論 文
A ThesisSubmitted to Department of Civil Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
In
Civil Engineering July 2008
Hsinchu, Taiwan, Republic of China
倒傳遞網路應用於油氣儲集層亮點偵測
研 究 生:詹世偉 指導教授:曾仁杰 博士
國立交通大學土木工程學系(研究所)碩士班
摘要
震測剖面圖圖資的複雜程度常常引起人員的誤判,然而因誤判而進行鑽探的結果往 往造成三千萬成本的損失。震測資料解釋人員憑其經驗法則判圖,若此經驗法能以類神 經網路取代,以類神經網路辨識的結果做為解釋人員判圖的參考,屏除震測解釋人員情 緒化的主觀判斷或因眼誤造成誤判機會。 過去的油氣亮點圖形辨識,尚無法實際運用在震測資料解釋上,一為所使用的震測 剖面圖測試樣本為最完美情況下之圖形,與實際震測剖面圖有相當的落差,二為抽取之 特徵值並非實際油公司常用的特徵,故應用上有困難。 本研究主要探討如何使用類神經網路於震測剖面圖的亮點圖形辨識,經由實地訪談 油公司取得震測剖面圖資,並提出了五項常用特徵,如下:震波原始訊號(Seismic Signal)、 震幅強度(Envelope)、瞬間頻率(Instantaneous Frequency)、瞬間相位(Instantaneous Phase)、 逆推阻抗(Inversion Impedance),再將特徵做前處理(Pre-processing),如:除去異常極大值、 除去極端異常值、正規化,最後輸入網路,反覆測試出使辨識率最佳的可能特徵組合、 訓練函數(倒傳遞網路之變形 Levenberg-Marquardt、Conjugate Gradient)、網路層數與神經元數,共12480 組,最後提出最佳化辨識率的儲集層亮點辨識法。
Detection of Oil Reservoir Bright Spot using
Back-propagation
Student:Shih-Wei Chan Advisor:Ren-Jye Dzeng
Department of Civil Engineering National Chiao Tung University
Abstract
The complexity of two-dimensional seismic data often leads to mistakes in discriminating oil reservoir. However, mis-drilling caused by these mistakes brings about thirty million loss in cost each time. Seismic data interpreters do recognition by rules and experiences. If we can use neural network in place of rules and experiences, then we can get rid of some chances of seismic data interpreters’ emotional discrimination or mislook.
The past oil reservoir bright spot detections still can't be applied to practice for two reasons. First, target seismic data in past research to be detected is in perfect condition. Interpreters seldom deal with these kinds of seismic data in reality. There is a big difference between seismic data in perfect condition and seismic data in practice. Second, the seismic attributes that past research used differs from that interpreters used in oil companies.
The primary goal of this research is to apply back-propagation neural network to pattern recognition of oil reservoir bright spot. By interviewing with Seismic data interpreters in the oil company, we propose five seismic attributes in common use including seismic signal, evelope, instantaneous frequency, instantaneous phase and inversion impedance. After five seismic attributes of feature extraction, we do pre-processing on extracted features including transformating .segy file into .mat file, elimination of blunder, elimination of outlier, normalization and building feature set matrixes. Then, we import feature set into neural network and train matrix by matrix. By tuning any possible neural network layer, hidden layer node, training function(Levenberg-Marquardt, Conjugate Gradient), we have summed up to 12480 times of neural network training.
Finally, we propose a method of optimized-recognition rated oil reservoir bright spot detection.
致謝
本書獻給曾仁杰教授,兩年的指導雖短,但一切所學將會受用無窮。 本書獻給我的父親大人,是您的企圖心與謹慎行事讓我在軟弱或驕傲時能夠自 我反省。 本書獻給我的母親大人,是您賦予我不落窠臼的靈活思考,並以樂觀態度來面 對任何煩惱。 本書獻給我的兄弟,是你的毅力,讓我在意志不堅時有再站起的動力。 本書獻給芷婷,無時不刻以我為榮,讓我有自信面對困難重重。 本書獻給曾經一起為中油計劃絞盡腦汁無數夜晚的維屏。 本書獻給研究室的大家,兩年的相處情同手足,將會是伴隨我一輩子的寶物 本書獻給曾經幫助我完成論文的吳明賢組長、傅式齊博士、王世旭博士。 本書獻給口試委員楊亦東教授、潘南非教授、謝東儒教授感謝您的熱情指導,讓本 書內容增色不少。 詹世偉 2008 夏,於交通大學土木所營管組研究室目錄
摘要 _____________________________________________________________________ I Abstract __________________________________________________________________ II 目錄 ____________________________________________________________________ IV 圗目錄 __________________________________________________________________ VI 表目錄 ________________________________________________________________ VIII 第 1 章 緒論 ___________________________________________________________ 1 1.1 研究動機 _______________________________________________________________ 1 1.2 研究目的 _______________________________________________________________ 4 1.3 研究架構 _______________________________________________________________ 6 第 2 章 文獻回顧 _______________________________________________________ 8 2.1 震測剖面圖背景知識介紹 _________________________________________________ 8 2.2 亮點偵測相關文獻回顧 __________________________________________________ 13 2.2.1 直接探油法 _________________________________________________________________ 13 2.2.2 人工智慧應用於油氣儲集層亮點偵測 ___________________________________________ 19 第 3 章 震波特徵搜尋與前處理 __________________________________________ 21 3.1 相關震波特徵搜尋 ______________________________________________________ 21 3.2 亮點相關震波特徵選取 __________________________________________________ 23 3.2.1 選取之震波特徵介紹 _________________________________________________________ 23 3.2.2 所選取特徵與亮點之間的關係 _________________________________________________ 25 3.3 前處理 ________________________________________________________________ 26 第 4 章 倒傳遞網路 ____________________________________________________ 31 4.1 類神經網路介紹 ________________________________________________________ 31 4.2 探討亮點偵測之線性分割性 ______________________________________________ 33 4.3 倒傳遞網路介紹 ________________________________________________________ 35 4.4 傳統倒傳遞網路之缺點 __________________________________________________ 37 4.5 共軛倒傳遞網路介紹 ____________________________________________________ 39 4.6 Levenberg-Marquardt 倒傳遞網路介紹 _____________________________________ 41 第 5 章 網路測試 ______________________________________________________ 425.1 網路測試流程介紹 ______________________________________________________ 42 5.2 震測資料介紹 __________________________________________________________ 43 5.2.1 震測資料亮點正確答案定義 ___________________________________________________ 45 5.3 倒傳遞網路設計 ________________________________________________________ 47 5.3.1 三層網路 ___________________________________________________________________ 47 5.3.2 四層網路 ___________________________________________________________________ 48 5.3.3 小結 _______________________________________________________________________ 49 5.4 計算辨識率 ____________________________________________________________ 50 5.5 辨識結果的數據記錄 ____________________________________________________ 52 第 6 章 辨識結果分析 __________________________________________________ 53 6.1 辨識結果分類 __________________________________________________________ 53 6.2 三層 CGBP 與 LMBP 之比較 _____________________________________________ 62 6.3 三層 CGBP 與四層 CGBP 之比較 _________________________________________ 65 6.4 其他測線亮點辨識測試 __________________________________________________ 67 第 7 章 結論與建議 ____________________________________________________ 69 7.1 結論 __________________________________________________________________ 69 7.1.1 改進「油氣地層震波特徵分析委託試驗分析」之結果 _____________________________ 69 7.1.2 輔助震測資料解釋實際應用 ___________________________________________________ 72 7.2 建議 __________________________________________________________________ 83 參考文獻 ________________________________________________________________ 84 附錄一 __________________________________________________________________ 86 附錄二 __________________________________________________________________ 87 附錄三 __________________________________________________________________ 88
圗目錄
圖 1.1 神經元模型 _______________________________________________________________________ 1 圖 1.2 震測剖面圖 _______________________________________________________________________ 3 圖 1.3 研究架構圖 _______________________________________________________________________ 7 圖 2.1 震波勘測示意圖[13] _______________________________________________________________ 8 圖 2.2 震盪震源車 ______________________________________________________________________ 8 圖 2.3 受波器示意圖 _____________________________________________________________________ 9 圖 2.4 反射波與折射波 __________________________________________________________________ 10 圖 2.5 局部震測剖面圖 __________________________________________________________________ 11 圖 2.6 震測資料處理流程圖[14] __________________________________________________________ 12 圖 2.7 典型油氣儲集層地理模型[15] ______________________________________________________ 14 圖 2.8 震測剖面圖上的典型油氣儲集層[15] ________________________________________________ 14 圖 2.9 平點[15] ________________________________________________________________________ 15 圖 2.10 相位反轉[15] ___________________________________________________________________ 16 圖 2.11 速度低垂[15] ___________________________________________________________________ 17 圖 2.12 氣囪[15] _______________________________________________________________________ 18 圖 2.13 樹狀分類器示意圖 _______________________________________________________________ 19 圖 3.1 震波特徵處理流程圖[17] __________________________________________________________ 22 圖 3.2 特徵關係圖 _______________________________________________________________________ 25 圖 3.3 前處理流程圖 ____________________________________________________________________ 26 圖 3.4 資料轉換示意圖 __________________________________________________________________ 27 圖 3.5 建立特徵組合矩陣 ________________________________________________________________ 29 圖 4.1 感知器模型 _______________________________________________________________________ 33 圖 4.2 exclusive or problem(XOR) _______________________________________________________ 33 圖 4.3 線性不可分割圖(a) _______________________________________________________________ 34 圖 4.4 線性不可分割圖(b) ________________________________________________________________ 34 圖 4.5 傳統倒傳遞網路模型[25] __________________________________________________________ 35 圖 4.6 傳統倒傳遞網路收斂圖 ____________________________________________________________ 37 圖 4.7 各類倒傳遞網路收斂圖 ____________________________________________________________ 37 圖 4.8 SDBP 與 CGBP 收斂路徑比較圖 _______________________________________________________ 39 圖 5.1 測試流程圖 ______________________________________________________________________ 42 圖 5.2 官田、隆田測線俯視圖 ____________________________________________________________ 44 圖 5.3 隆田測線(訓練組)震測剖面圖 ______________________________________________________ 45 圖 5.4 官田測線(訓練組)震測剖面圖 ______________________________________________________ 45 圖 5.5 隆田測線(訓練組)亮點二元圖 ______________________________________________________ 45 圖 5.6 官田測線(測試組)亮點二元圖 ______________________________________________________ 46 圖 5.7 三層網路模型 _____________________________________________________________________ 47圖 5.8 四層網路模型 _____________________________________________________________________ 48 圖 5.9 型 I 及型 II 誤差示意圖 ___________________________________________________________ 51 圖 5.9 型 I 及型 II 誤差示意圖 ___________________________________________________________ 51 圖 6.1 型一、型二誤差分級表 ____________________________________________________________ 53 圖 6.2 最佳表現 ________________________________________________________________________ 55 圖 6.3 過粗 ____________________________________________________________________________ 56 圖 6.4 雜訊過高 ________________________________________________________________________ 57 圖 6.5 過細 ____________________________________________________________________________ 58 圖 6.6 分岔 ____________________________________________________________________________ 59 圖 6.7 訊號微弱 ________________________________________________________________________ 60 圖 6.8 無法辨識 ________________________________________________________________________ 61 圖 6.9 三層 CGBP 辨識結果分佈圖 __________________________________________________________ 63 圖 6.10 三層 LMBP 辨識結果分佈圖 _________________________________________________________ 63 圖 6.11 CGBP 與 LMBP 型一誤差直方圖 ______________________________________________________ 64 圖 6.12 CGBP 與 LMBP 型二誤差直方圖 ______________________________________________________ 64 圖 6.13 特徵重新組合比較圖 _____________________________________________________________ 66 圖 6.14 擷取新營測線之震測剖面圖 _______________________________________________________ 67 圖 6.15 使用 CGBP(2-8-10-1)特徵 SF 之辨識結果 ____________________________________________ 68 圖 6.16 使用 CGBP(4-12-12-1)特徵 SFAP 之辨識結果 _________________________________________ 68 圖 7.1 「油氣地層震波特徵分析委託試驗分析」之分段決策 ___________________________________ 71
表目錄
表 2.1 震波原始訊號 ____________________________________________________________________ 11 表 3.1 特徵組合表 ______________________________________________________________________ 30 表 5.1 擷取測線基本資料 ________________________________________________________________ 44 表 5.2 網路總數統計 _____________________________________________________________________ 49 表 5.3 型一及型二誤差表 _________________________________________________________________ 51 表 5.4 辨識結果數據記錄表 _______________________________________________________________ 52 表 6.1 辨識結果分類表 __________________________________________________________________ 54 表 6.2 新營測線基本資料 ________________________________________________________________ 67 表 7.1 各網路類型比較表[27] ____________________________________________________________ 70 表 7.2 建議特徵組合選取順序 ____________________________________________________________ 73 表 7.3 各特徵組合最佳總辨識率 __________________________________________________________ 82第1章 緒論
1.1 研究動機
石油探採領域中,震測剖面圖辨識結果為攸關石油礦區開採與否的重要工作,震測 剖面圖辨識的解釋工作有賴大量人力的投入,震測資料解釋工作多半需要長久經驗累積 才能勝任,而且往往需要以資料解釋人員主觀判斷,而震測剖面圖的圖面複雜程度,即 使交由一經驗豐富的解釋人員判圖仍有誤判疏漏之虞,完成一張震測剖面圖的資料解釋 需時甚久,如何有效提高辨識速度與降低誤判率成為重要的議題。 類神經網路,於十九世紀末發展至今,一百多年來的發展已為人類解決了不少問題, 並廣泛被應用在的各個領域,如:國防武器的目標追蹤、公司的財務分析、酒精濃度測試、 車牌辨識……種種領域的應用[1],都為人類節省了不少人力與物力。類神經網路是以電 腦來模擬人類腦神經細胞網路的科學,使用大量簡單的相連人工神經元來模仿生物神經 網路的能力,這樣的能力使得類神經網路成為機器學習中功能強大的演算技術。 以下為一個最簡單的神經網路---單一神經元之模型: 圖 1.1 神經元模型 X: 稱為神經元的輸入(Input)。 W: 稱為鍵結值、權重值(Weighting),類神經網路的訓練就是在調整鍵結值,使其變 得更大或是更小,通常由隨機的方式產生介於+1 到- 1 之間的初始值。鍵結值可視 為一種加權效果,其值越大,則代表連結的神經元更容易被激發,對類神經網路的 影響也更大;反之,則代表對類神經網路並無太大的影響,而太小的鍵結值通常可 以移除以節省電腦計算的時間與空間。b: 稱為閥值(Bias),為神經網路所欲模擬方程式的常數項。 S: 稱為加法單元(Summation),此部分是將每一個輸入與鍵結值相乘後做一加總的 動作。 φ: 稱之為作用函數或活化函數(Activation Function),通常是非線性函數,有數種 不同的型式,其目的是將S 的值做映射後得到所需要的輸出。 Y: 稱之為輸出(Output),亦即我們所需要的結果。 類神經網路與人類大腦相同功能的三大重要特性[2]: 1、學習(Learning):適當的學習模式是類神經網路系統的基本條件,此功能讓類神 經網路在權重值反複迭代中發揮功效,能夠模擬系統的行為或特性。 2、回想(Recall):回想過程指網路受到輸入刺激後產生相對應的輸出值;類神經網路的 效能與強健性,與其回想過程是否快速有效有關。 3、歸納推演(Generalization):歸納推演法是從一個系統中局部觀察描述出其整體特性 的過程。 近年來類神經網路也漸漸應用於石油探採領域[3][4][5][6],借助電腦的強大運算能 力,應用類神經網路於震測剖面圖的圖形辨識,藉以輔助震測剖面圖辨識。 圖1.2 為一般石油公司震測資料解釋人員所用之震測剖面圖,記錄著地表下數千米 深的地層分佈,橫軸代表野外震波勘測佈設的受波器站號,縱軸為時間每0.004 秒紀錄 一次,所記錄內容即是地層的反射係數R 值,黑色為地層反射系數為負數,白色為正數, 直接油氣徵示(DHI)中亮點(Bright Spot)的出現通常在於黑色部分,圖面上多層的黑色訊 號皆有成為亮點的可能性,很容易讓震測資料解釋人員誤判。
圖 1.2 震測剖面圖 震測剖面圖油氣儲集層的資料解釋工作傳統都是由訓練有素的人員,憑著本身長久 以來對震測解釋的經驗加以判讀,震測剖面圖圖資的複雜程度常常引起人員的誤判,然 而因誤判而進行鑽探,經訪談台灣中油的結果,一次錯誤的鑽井往往造成三千萬成本的 損失。 震測資料解釋人員憑其經驗法則判圖,若此經驗法能以類神經網路取代,以類神經 網路辨識的結果做為解釋人員判圖的參考,就能屏除震測解釋人員的情緒化的主觀判斷 或因眼誤而造成誤判機會。
1.2 研究目的
類神經網路在石油探採領域的應用已有 20 年以上的發展歷史,所應用的地方多半 為油氣儲集層亮點(Bright Spot)的偵測[7][8][9][10],所提出的偵測方法有很多,但實際 應用在震測剖面資料解釋上,資料解釋人員應用的情況卻不多,經歸納後原因有以下三 點: 1. 多半由於所提出的類神經網路偵測方式只能解決某些震測剖面圖的問題,如 mississippi canyon 這類較完美圖資,整體辨識方式缺乏通用性,換做一般震測 剖面圖時就可能有無法辨識的情形發生。 2. 由於震測資料處理人員對震測剖面圖處理方式的不同,導致處理完畢的數據值 域範圍因圖而異,若忽略值域範圍的變異貿然辨識,將會增加誤判亮點的機 會。 3. 地球物理上相關亮點的震波特徵眾多,所提出辨識方法用到的特徵不是常用特 徵,震測資料解釋人員實際應用上有困難。 4. 所提出的辨識方法辨識率尚低不實用。 本研究回顧過去人工智慧應用於亮點偵測的研究,依據訪談專家所歸納出的經驗法 則,並參考文獻中提出之亮點偵測的方法,利用倒傳遞類神經網路建置一油氣儲集 層亮點偵測系統以提高油氣辨識度並解決實際應用上有困難的問題。 本研究目的有三: 1. 歸納亮點出現的經驗法則 震測資料解釋的工作屬於一種內隱知識(Tacit Knowledge),相關的震波特徵 (Seismic Attribute)更是為數眾多,分別有著和油氣地層直接或是間接的關係, 且並非所有震波特徵都是震測資料解釋人員所熟悉或慣常使用的,如何從眾多 震波特徵中找到與亮點偵測相關的特徵,並將這些油氣特徵簡化且不遺漏相關 資訊是個重要問題,將透過訪談震測資料解釋人員,實地了解震測資料解釋時 常用之震波特徵,並將亮點出現的經驗法則歸納,用於之後特徵抽取時之參 考。2. 提出亮點辨識的相關震波特徵 整理過去亮點偵測相關研究以及專家經驗,參考過去研究所使用過之震波特徵, 並參考經訪談過後震波解釋人員所較廣泛使用的震波特徵,比較其優缺後,提 出辨識亮點的相關震波特徵用於未來倒傳遞網路訓練。 3. 提出最佳化辨識率的儲集層亮點偵測法 油氣儲集層亮點偵測為一圖形辨識問題,更進一步的說是一個分類問題,將一 張震測剖面圖分為亮點與非亮點兩種,在N 度空間上(N 為抽取的特徵數)可大 致以一個N-1 維的超平面(Hyperplane)做為兩類的決策邊界(Decesion Boundary), 但將線性不可分割問題這樣簡化成為線行可分割結果就是犧牲掉某些辨識率, 如:原本非亮點辨識成為有亮點、原本亮點辨識成為非亮點,詳細的內容將會在 4.2 節介紹,本研究採用類神經網路中用於求解非線性可分割問題較為容易解 釋且最為廣泛使用的網路型式---倒傳遞網路,但只使用傳統的倒傳遞網路恐怕 有許多問題[11][12],第一,傳統倒傳遞網路收斂方向為最陡坡降法(Steepest Descent,SDBP),即是朝著各分量的梯度最大方向去更新網路權重,此方法單 調,且網路收斂較為緩慢無效率,第二,單調的收斂容易落入局部極小值導致 網路無法收斂,基於以上兩種理由,本研究改採異於傳統倒傳遞網路坡降法的 訓練模式,使用共軛梯度法(Conjugate Gradient Method, CGBP)與 LM 法 (Levenberg Marquardt, LMBP),反覆測試出使辨識率為最佳的可能特徵組合、
網路層數與神經元數,比較 CGBP 與 LMBP 兩者孰優,提出最佳化辨識率的
1.3 研究架構
利用專家訪談方式整理出震測資料解釋人員判別油氣存在與否之法則,將直接探油 法(Direct Hydrocarbon Detection,DHD)或油氣徵示(Direct Hydrocarbon Indicator, DHI)所 有油氣指標中最為重要的---亮點作為本研究偵測之目標,根據亮點之地球物理特性找到 相關之震波特徵,並參考石油公司一般震測資料解釋人員之使用習慣,選擇出本研究之 亮點相關震波特徵,以增加應用於實際震測資料解釋工作之實用性,我們根據所欲抽取 之亮點相關震波特徵去蒐集震測資料處理流程較佳之震測剖面圖資以期望神經網路學 習時有更好的表現,震測資料剖面圖資蒐集完畢後,做特徵抽取與前處理,特徵抽取目 的在將地球物理記錄採用之檔案格式與本研究所使用之分析工具檔案格式作轉換,所抽 取的震波特徵共有五項: 震波原始訊號(Seismic Signal)、震幅強度(Envelope)、瞬間頻率 (Instantaneous Frequency)、瞬間相位(Instantaneous Phase)、逆推阻抗(Inversion Impedance), 而前處理目的在於使資料在代入神經網路訓練時有較好的收斂性,前處理完畢後將資料 分做訓練組與測試組,訓練組帶入事先設計完畢之神經網路訓練後輸出網路,再將測試 組代入訓練完畢之神經網路,計算後輸出亮點辨識結果,最後再對輸出之亮點辨識結果
第2章 文獻回顧
2.1 震測剖面圖背景知識介紹
震波勘測法(Seismic Reflection)為探採地球物理學中用以探測地球表層性質的重要 方法,示意如圖2.1 主要是利用給予目標地層一個人工的震波,並在欲探測的地區事先 佈好測線與埋入受波器,接收因震源爆炸而地層產生反射回到地面受波器的訊號,此人 工震波的產生有二,其一為使用傳統炸藥爆破(Dynamite)方式,其二為使用震盪震源車 (Vibrator Truck),如圖 2.2,其中後者較為先進,現今大部分的石油公司的石油探採作業 都已經採取震盪震源車來取代傳統炸藥爆破,並根據地層因人工震波產生的反射波經由 事先在欲探測地區埋設的受波器(Geophone)又稱地音探測器,此種探測方式類似於海洋 聲納探測的原理。 圖 2.1 震波勘測示意圖[13] 圖 2.2 震盪震源車圖 2.3 受波器示意圖 受波器(Seismometer)為一種用於震測資料取得的設備,用於量測因震波而產生的目 標地層垂直方向位移速度,其構造係將永久磁鐵固定於受波器上,將彈簧繫在一個可動 線圈之上,當震波到達受波器時產生震動,線圈則會上下移動產生感應電流,將量測到 的地層位移速度轉換成一類比的電訊脈衝(Electrical Impulse)並記錄於磁帶之上,現今做 法為直接將類比訊號轉換成數位訊號並直接記錄。但所蒐集到的震測資料仍需要一連串 的震測資料處理後成為震測剖面圖,做成才能交由震測資料解釋人員做進一步的判讀。 經由上述震測資料取得的程序我們可以簡單用下式來表示:
Recorded signal = Source Pulse *[Reflectivity*(Earth filter+Noise)]*Detector
response*Recording instrument response
假設我們已知震源的特性、受波器的特性與記錄系統的特性,這些都是不論任何受 波器都是一樣不變的因子,則我們能將中括弧中的東西獨立出來,即是
Recorded signal=[Reflectivity*(Earth filter+Noise)]
所以[Reflectivity*(Earth filter+Noise)]所代表的就是震波經地層過濾後的反應,而震 測資料解釋人員想取得的資料就是地層的反射係數(Reflectivity),至於震波在地層過濾 的過程為一吸收與衰減的變數函數,這可在震測資料處理時做補償;而雜訊則無法適當 的於震測資料處理時降低,但可於資料取得時利用受波器的設置的排列方式做補償。 任 何 支 持 震 波 前 進 的 介 質 都 存 在 著 阻 抗(Impedance) , 又 稱 聲 波 阻 抗 (Acoustic Impedance),會使震波能量下降而衰減,阻抗 Z 可定義為下列方程式: Z=ρV ρ: 地層密度 V: 波傳速度
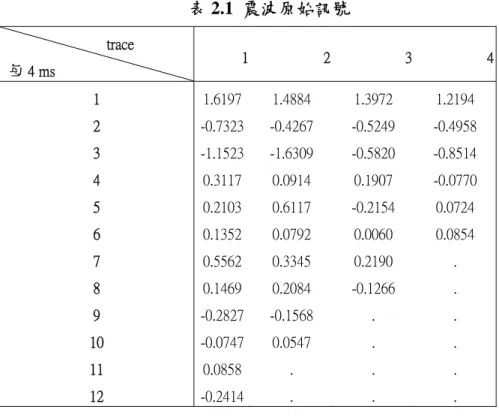
當震源的波傳遞至兩個不同的地層介面時,由於兩個地層有不同的阻抗值,而波的 部分能量反射部分回地層表面,其餘折射繼續傳遞,如圖2. 4 所示。 圖 2.4 反射波與折射波 R Z Z Z Z Z :地層上層阻抗 Z :地層下層阻抗 反射係數可為正數,亦可為負數。組織較鬆軟的地層覆蓋於組織較扎實的地層上 (Z Z )時,為正數;相反時,為負數。 反射波的大小預測是由入射波的震幅乘上反射係數而得,這就是為什麼震波野外勘 測要量測震波反射係數的原因,只要知道反射係數就可以知道反射波大小,但我們卻又 無法實際測得地層的反射係數,但卻可以直接量測受波器所接收震幅大小來模擬阻抗, 故震測剖面圖上震幅(Seismic Amplitude)就等同於反射係數 R,而震幅的測量則以受波器 接受震動後產生的訊號表示,表2.1 為原始震幅訊號,橫軸 trace 表示受波器編號,縱軸 為時間(雙程走時)表示每 0.004 秒接收一次,意味著地層深度,將原始震幅訊號轉換成 波形,波峰代表原始震幅訊號為負的資料點,意即較硬岩層覆蓋於較軟岩層上面,波峰 部分塗黑表示,波谷代表震波原始訊號為正的資料點,意即較軟岩層覆蓋於較硬岩層上 面,波谷部分留白表示,如圖2.5,即為局部震測剖面圖。
表 2.1 震波原始訊號 trace 每 4 ms 1 2 3 4 1 1.6197 1.4884 1.3972 1.2194 2 -0.7323 -0.4267 -0.5249 -0.4958 3 -1.1523 -1.6309 -0.5820 -0.8514 4 0.3117 0.0914 0.1907 -0.0770 5 0.2103 0.6117 -0.2154 0.0724 6 0.1352 0.0792 0.0060 0.0854 7 0.5562 0.3345 0.2190 . 8 0.1469 0.2084 -0.1266 . 9 -0.2827 -0.1568 . . 10 -0.0747 0.0547 . . 11 0.0858 . . . 12 -0.2414 . . . 圖 2.5 局部震測剖面圖 截至目前為止外業的資料取得工作告一段落,接下來則是震測資料處理的內業開始, 在震測資料解釋人員判讀之前,資料仍要經過多重的處理,資料處理品質的好壞影響震 測解釋人員判圖的準確度,劣質的資料處理可能導致油氣地層的抹除或震測人員的誤判, 重要的資料處理如:速度分析(Velocity Analysis)、解迴旋(Deconvolution)、抹除(Normal Moveout)、位移修正(Migration)…等。
以下為基本震測資料處理的流程圖:
2.2 亮點偵測相關文獻回顧
2.2.1 直接探油法
一般震測資料解釋人員多採取直接探油法(Direct Hydrocarbon Detection,DHD)或油 氣徵示(Direct Hydrocarbon Indicator, DHI),其目的在於直接在震測剖面圖上利用某些指 標性的現象來判斷油氣地層的出現與否,通常等同於找到震測剖面圖上亮點(Bright Spot),直接探油法在某些情況下是非常有效的資料解釋方式,但缺乏一完善的通則可循, 資料解釋人員的判圖經驗影響結果甚大。
直接探油法的意義與可行性的討論始於1963 年 Churlin 和 Sergeyev,直到 1970 年
代,亮點分析技術(Bright Spot Technique)被廣泛使用於油氣儲集層的辨識。
何謂亮點?地層中若有油氣的存在,由於油氣儲集層的出現,地層中會出現介質的 改變於震測剖面圖上非油氣地層與油氣地層之間會有一個明顯的強震幅出現,所以震測 資料解釋人員在震測剖面圖上若看到有強震幅的出現,則會假設為有亮點出現的可能性, 但亮點並非萬無一失的油氣儲集層指標,故利用震幅與其他震波特徵結合,如:相位、極 性、頻率、速度…,輔助亮點的辨識的相關論文油然而生。 1980 年 Sheriff 和 Geldart 將常見的直接探油指標整理列舉出來,如下[15]: 1. 亮點(Bright Spot) 為震測剖面圖上一局部震幅因油氣儲集的關係所增加的情況,由於上方為 頁岩將油氣構造整個封住,所以在頁岩與含氣砂層的交界處產生一個明顯的負 震幅,而震測剖面圖上所見則為一個黑色的連續的訊號。亮點為在砂岩頁岩交疊 的地層中最能指出油氣所在的指標。但所適用的地區在淺層地區,約八千英呎 (2400 公尺)以下,原因為八千公尺以下含油砂層、含氣砂層、含水砂層、頁岩 層速度差別較大,在震測剖面圖上所記錄的震幅較大較易分辨,隨著深度越來 越深,四種地層速度趨於接近,震波勘測所接收到的訊號隨著深度(走時)的增 加,所接收到的震幅變小,變得不易區別,圖2.7 為油氣儲集層的地理模型,由上 到下分別為頁岩、含氣砂層(氣蓋)、含油砂層、含水砂層、頁岩,上下頁 岩就像容器一樣包覆著儲集層,圖2.8 為油氣儲集層的震測剖面圖,震測剖面圖上 所見的典型油氣儲集層,A 點所指的負強反射區即為含氣砂層的頂端,就是所謂亮 點,對應到2.7 地理模型為含氣砂層,而亮點的出現下方就是油氣儲集層的蘊含地 點。
圖 2.7 典型油氣儲集層地理模型[15] 圖 2.8 震測剖面圖上的典型油氣儲集層[15] 2. 平點(Flat Spot) 為震測剖面圖上一個水平的正震幅,乃由於含油砂層中與含氣砂層兩者間氣液 介面會出現隨水平面延伸的平整現象,圖2.9 箭頭所指向之微小正震幅近乎 水平的地方即是平點。
圖 2.9 平點[15] 3. 暗點(Dim Spot) 為一個局部性的震幅縮小,被假設為油氣儲集層的出現。暗點的出現通常伴隨 孔隙率較小的儲集岩或受壓縮力量較大的砂層。一般認為人工震波從頁岩進入 砂延時會產生強震幅,但油氣儲集層的出現卻使得聲波阻抗降低而成了暗點。 4. 相位反轉(Phase Reversal) 震測剖面圖上氣罩(Gas Cap)部分隨著左右延伸會遇到由一個油/氣介面、氣/頁 岩介面與油/頁岩介面所組成的區塊,震測圖上極性的改變由氣/頁岩介面的負 值到油/頁介面的正值,稱為相位反轉現象,在真實震測剖面圖上,則是呈現一 連續的黑色正的訊號隨著水平方向漸漸變為白色負的訊號,如圖2.10 紅色圓 圈中所示,正震幅向右延伸漸漸變弱,最終轉為負震幅。
圖 2.10 相位反轉[15] 5. 頻率改變(Frequency Change) 油氣儲集層由於介質的改變通常伴隨著較低頻率的出現,主要是由於震波勘測 所釋放出的人工震波行經油氣儲集岩層時波速減慢,我們無法從震測剖面圖上 直接觀測到地層頻率改變,仍需要經過震測資料的訊號處理才能讓震測資料解 釋人員判讀。 6. 速度低垂(Velocity Sag) 於DHI 中較為少見的指標之一,主要意義為油氣儲集層下方會出現一個,練續 訊號一致往下拉的情況,原因為波行經油氣儲集層由於介質密度鬆散傳波時間 較長,導致儲集層下放訊號的時間延遲,但速度低垂的現象在油氣儲集層較厚 的情況下才有可能較為明顯的速度低垂,如圖2.11,箭頭所指之區域,由於上 方油氣儲集層的出現,震幅出現凹向上的速度低垂情況。
圖 2.11 速度低垂[15] 7. 陰影帶(Shadow Zone) 也是較為少見的指標,存在於油氣儲集層下方由於震波經過儲集層後,人工震 幅的能量因為經過介質密度低的地層之後被吸收,產生下方能量較為微弱,震 測剖面圖上出現的是瑣碎零散的震幅訊號,圖2.11 與圖 2.12 儲集層下方也有 陰影帶的出現。 8. 煙囪效應(Seismic Chimney) 位於淺層地層,出現於油氣儲集層上方的局部震測品質較差的現象,此較差現 象的產生起因於油氣儲集層中的氣體向上滲漏,氣體灌入上方地層造成震測剖 面圖較為不清楚、紊亂的情形,向上灌入的結果就如儲集層上方出現煙囪或是 雲狀物,故又稱氣囪(Gas Chimney)或氣雲(Gas Cloud),圖 2.12 黑色線所含括 的部分即是煙囪效應的範圍。
圖 2.12 氣囪[15]
探採地球物理學會(Society of Exploration Geophysicist, SEG )所發行的百科全書中 (1984)對直接探油法解釋:為一種可以指出油氣地層存在與否的方法,通常即是判別亮點 (Bright Spot)的存在,直接探油法在某些環境下是很效辨識方法,但並非完全適用各種 情況。 經震測剖面圖資料解釋人員訪談的結果,亮點的出現多半位於震測剖面圖強反射的 地方,但強反射的出現並非都為亮點,有時為地層不整合面的出現,有時也可能為碳酸 鹽地質,真正的亮點仍要經過淘選才能確定。 1989 年 Yu 和 Chen,文中提及亮點為砂岩頁岩相互堆疊的地層中,最能凸顯油氣 地層的指標。[15]
2.2.2 人工智慧應用於油氣儲集層亮點偵測
近年來對於人工智慧應用在震測剖面圖亮點圖形辨識上,有Huang & Fu 提出以樹 狀 分 類 器(Tree Classifier) 來 進 行 亮 點 偵 測 [10] , 所 抽 取 出 的 油 氣 特 徵 為 震 幅 強 度 (Envelope)、瞬間頻率(Instantaneous Frequency)與極性(Polarity)。樹狀分類器分類方式為, 先設定三項特徵的閥值(threshold),將所有的要進行辨識的資料點依震幅強度、瞬間頻 率、極性的順序分層淘選,最後剩下的即是亮點。 分類示意如下: 圖 2.13 樹狀分類器示意圖Huang 又提出以非參數式的方法(Nonparametrical Method) [7]。
1. 使用線性分類器(Linear Classification),所提出的為一種監督式學習的分類法, 所抽取特徵向量為:震幅強度、瞬間頻率,反覆迭代特徵向量,每次迭代後等量 改變權重的訓練方式,類似於感知器分類器的方法,將震波剖面圖上之亮點與 非亮點區域之間的決策邊界(decision boundary)以一條斜直線分隔出來,本文所 使 用 的 到 的 二 項 特 徵 為 瞬 間 頻 率(Instantaneous Frequency) 與 震 幅 強 度 (Envelope)。
2. 使用二次分類器(Quadratic Classification),同樣抽取線性分類器中相同的特徵, 此處的決策邊界則為一條二次曲線。 D(X) = ∑N w x + ∑N ∑N w x x + ∑N w w + w L = ax bx cy d = 188.03x 10589.4x 11877.86y 1960 0 x: 瞬間頻率 y: 震幅強度 1998 年,中國大陸開始出現應用類神經網路於油氣儲集層的辨識方法,所使用的方 法有模糊識別油氣預測法、倒傳遞類神經網路(BPNN)油氣預測法,此時的類神經網路 辨識方法尚存在著訓練速度緩慢、辨識率不佳的情況。
Liu、Feng、Xia 和 Zheng[9],所採取的網路為幅射徑向基網路(Radial Basis Function ) 用以改善之前類神經網路辨識方式的種種缺點,所採取的特徵有下列六項:均方根震幅、 瞬間頻率、瞬間相位、最大震幅、最小震幅、平均能量,以十個由油層、氣層、水層抽
取出的樣本點做訓練,辨識結果顯示網路設計為6-9-3 的幅射徑向基網路能提供 90%的
第3章 震波特徵搜尋與前處理
3.1 相關震波特徵搜尋
震波特徵(seismic attribute)為取自震測資料中任何可被量測到、加以計算的資料,震 波特徵隱含著有關目標地層岩性、地層延續性或是否隱含油氣地層。值得注意的一點是, 為了期望得到最佳的震波特徵,震測資料需要被小心翼翼的處理方能使資料的可解釋性 增強。 以下列舉出的震波特徵為已被提出的特徵,此處使用提出二字,意指並非所有特徵 都已被人證明有效運用,但其中也包含了許多特徵為長久以來震測解釋人員使用的重要 特徵參考。 我們將此類物理特性依堆疊處理程序再細分成堆疊後特徵(Post-Stack Atrribute)和 堆疊前特徵(Pre-Stack Attribute),其中另外又有響應特徵(Response Attribute),是有關於 震波頻譜(Wavelet spectrum)方面的特徵[16]。一、堆疊後特徵(Post-Stack Attribute)
堆疊後特徵都是有關瞬時的特徵故又名瞬時特徵(Instantaneous Attribute),堆疊後的 特徵都是由合成震波的原始資料經希爾伯特轉換(Hilbert Transform)產生合成震波的虛 部後再經數學轉換後而得,以下為特徵列表:
1. 震波原始訊號(Seismic signal, Real part of Complex trace ) 2. 複波訊號的虛部(Imaginary Part of the Complex trace)
3. 瞬間震幅(Instantaneous Amplitude, Reflection Strength, Envelope) 4. 瞬間震幅對時間的一次微分
5. 瞬間震福對時間的二次微分 6. 瞬間相位(Instantaneous Phase) 7. 瞬間頻率(Instantaneous Frequency) 8. 瞬間加速度
9. Thin Bed Indicator
10. Instantaneous Dominant Frequency 11. Instantaneous Band-width
12. Instantaneous Relative Acoustic Impedance 13. Normalized Amplitude
14. Envelope modulated Phase 二、堆疊前特徵(Pre-Stack Attribute)
非經希爾伯特轉換而產生的特徵。 1. RMS Velocities of Reflectors
三、響應特徵(Response Attribute) 主要抽取方式為先找出震波強度中的波辦(Lobe),相鄰的兩個波瓣間定義為一個波 長,將一個波長中一定會有一最大值的波鋒(Spike)出現的時間取出,此步驟意在找尋局 部最大值,當做響應特徵抽取的參考時間點。 1. Response Amplitude 2. Response Frequency 3. Response Phase 下圖為自震測圖原始資料轉換成各種特徵的資料處理流程圖: 圖 3.1 震波特徵處理流程圖[17]
3.2 亮點相關震波特徵選取
亮點相關震波特徵的選取的用意在於作為本研究未來類神經網路的輸入向量,選擇 的依據除了是否能直接或間接指出油氣儲集層亮點與否之外,仍需要考慮到所選曲的特 徵是否廣泛的問題,若選取的震波特徵為震測資料解釋人員所不熟悉或不常使用的特徵, 則將使本研究的結果無法適用於真實震測資料解釋,為此,本研究採用專家訪談的方式, 藉以輔助本研究進行亮點相關震波特徵的選取,所訪談人員為台灣中油股份有限公司之 震測資料解釋人員二位,震測資料解釋經驗約為30 年,並由 3.1 節中之特徵經由中油震 測資料解釋人員挑選資料解釋時常用之特徵做為本研究選取之特徵。 本研究所選取的特徵如下: 1. 震波原始訊號(Seismic Signal) 2. 震幅強度、瞬間震幅(Envelope) 3. 瞬間相位(Instantaneous Phase) 4. 瞬時頻率(Instantaneous Frequency) 5. 逆推阻抗(Inversion Impedance) 6. 極性(Polarity)3.2.1 選取之震波特徵介紹
1. 震波原始訊號 Ψ(t)為複波(Complex Signal),複波分為實部 s(t)與虛部s(t)兩部分,而實部就為震測 原始訊號(Seismic Signal)[18][19] Ψ t s t i · s t where i √ 1 其中 s(t) 是由 s(t)經希爾伯特轉換(Hilbert Transform)而來 s t H s t h t *s t h τ · s t τ dτs τ · h t τ dτ 而複波的實部與虛部互為正交(Orthogonal、Quadrature),則 s t · s t dτ 0 2. 震幅強度的計算[18][19]: Env s t A t |Ψ t | s t s t A t :震幅強度
3. 瞬間向位的計算[18][19]: θ t tan θ t :瞬間相位 故 s t A t cosθ t 且 s t A t sinθ t 則複波訊號可以下式表示 Ψ t A t cosθ t i · sinθ t A t e 4. 瞬間頻率的計算[18][19]:
一般而言瞬間角頻率(Instantaneous Angular Frequency)為瞬間相位對時間的一次微 分 ω t θ t θ t ω t :瞬間角頻率 而瞬間角頻率乘上 後可得到瞬間頻率 f t θ t tan 5. 阻抗逆推的計算[20][21]: 阻抗逆推在計算上較為複雜,且一般逆推方式分為三種:遞迴阻抗逆推、約束稀疏脈 衝阻抗逆推、隨機阻抗逆推,其中較為直觀易理解的為遞迴阻抗逆推法。 反射係數公式為 R Z Z Z Z Z :上層地層阻抗 Z :下層地層阻抗 可根據以上公式得到阻抗逆推公式 Z Z RR 6. 極性: 即為震波原始訊號中震幅值的正負號 圖3.2 為本研究所選取其中五項特徵關係圖,先將原始震幅做一個正交處理後,和
原始震幅合併後就成為複波,由複波再經過先前所介紹的訊號處理後,即可得到瞬間頻 率、震幅強度、瞬間相位,而阻抗逆推則由原始震幅逆推而得,第六項特徵---極性未表 示在本圖上,乃因原始震幅中的正負號即代表極性。 圖 3.2 特徵關係圖
3.2.2 所選取特徵與亮點之間的關係
1. 震波原始訊號(Seismic Signal) 記錄著原始震幅資料包含著極性,人工震波由硬地層(頁岩)傳至軟地層(含水砂層), 反射係數上由於上層地層阻抗值較大,下方阻抗值小,所以得到反射係數為負的結 果,故亮點出現通常會有負極性與強震幅的出現。 2. 震幅強度 (Envelope) 震波行經油氣儲集層時,儲集層由於填滿著氣、水或油,故阻抗值小,波從堅硬的 地層傳至軟弱地層出現強的反射係數,所以亮點出現時通常伴隨著明顯較鄰近區域 大的震幅強度。 3. 瞬間相位(Instantaneous Phase) 瞬間相位表示著油氣地層的連續性,顯示亮點週圍的油氣連續程度,相位的值域為 正負 180 度,級大與極小的瞬間相位較容易出現亮點。 4. 瞬時頻率(Instantaneous Frequency) 人工震波行經油氣儲集層,介質密度下降,粒子的震動空間較大,則頻率相對較低, 故亮點通常伴隨著瞬間頻率的降低。 5. 逆推阻抗(Inversion Impedance) 儲集層的地層軟弱即代表具有低阻抗特性。 6. 極性(Polarity) 油氣儲集層通常為負值,包含於震波原始訊號中。3.3 前處理
在將訓練類神經網路所用的特徵向量餵入網路訓練之前,仍需經過一連串的前處理 程序,目地在於將數據統一處理以增加網路的收斂性、增加辨識率、將所蒐集來的震測 資料整理成我們想要的輸入向量格式,下圖為本研究所提出的亮點辨識前處理流程圖。
STEP1 SEG-Y 檔案資料轉換
震測剖面圖資料處理的基本格式為SEG-Y 格式,探採地球物理學會 (Society of
Exploration Geophysicists,SEG)所制定,本研究建立於 Matlab 上,所有數學運算都在此
平台上做處理,而SEG-Y 的資料記錄資料的數據型式為 IBM32,和一般 PC 所使用的
IEEE 型式不同,故之間需要做一個轉換的程序,下圖為資料轉換示意圖。
圖 3.4 資料轉換示意圖
在擷取檔案之前,我們必須先對SEG-Y 格式有所了解,如圖左邊為一個 SEG-Y 檔
案的檔案格式分成三部分,分別為SEG-Y 檔頭、binary header、binary trace header:
1. 第一部分,首先 3200byte 以 EBCDIC 方式儲存的開頭描述,EBCDIC (Extended Code Decimal Interchange Code ),是美國 IBM 公司所制定的編碼系統, EBCDIC 碼的每一個字元是由 8 個位元所組成,共有 28 種組合,可以表示 256 個字元。此部分所記錄的資訊,如:檔案的名稱、檔案的儲存時間以及使 用者想要對檔案紀錄的資訊。
2. 第二部分是 400byte 的 binary header 紀錄了檔案中描述的資訊內容的資料,如 附錄一所示。
的資料量大小及記錄每一條trace 接收資料的頻率,如附錄二所示;而接下來
是trace data 也就是我們主要想得到的震測資料-R 值 (反射係數),以 32-bit
IBM floating point (IBM32)格式儲存其數值。
ReadSegy.m 用來取得.segy 檔中 Header、traceHeader 跟 traceData 的資料, 包含測線編號、接收站數目,幾秒接收一次等數值,而其下 GetSegyHeader.m、 GetSegyHeaderBasics.m、GetSegyTraceData.m、GetSegyTraceHeader.m、 ReadSegyHeader.m,這些用來幫助 ReadSegy()函數根據 SEG-Y 檔的儲存格式
來得到Header、traceHeader 跟 traceData 的資料。
ibm2num.m 因為目前 PC 的儲存格式以 IEEE 的標準格式來儲存,電氣電
子工程師協會IEEE(Institute of Electrical and Electronics Engineers)所制定的
電腦標準ASCII 格式,將原來使用 IBM32 儲存格式的 trace data 轉成 IEEE 才
能得到正確的數值,為此以ibm2num()函數來對 ReadSegy.m 所擷取出的數據 做處理轉換,若不將值轉換直接讀取會造成數據錯誤,最後儲存成MATLAB 的矩陣儲存格式.mat 檔。 STEP2 除去異常極大值 震測資料處理過程中,由於圖面資料點數目的龐大,動則上萬筆,處理人員 可能因為處理過程中的疏漏而在圖面上留下一筆明顯異於其他資料點的極大 值,如9.532х10 ,在所選取的五種特徵震測資料圖面上都有可能出現,若 不將此類數值在訓練網路之前剔除,貿然將數據餵入,容易使網路權重更新 時,突然變得很大,經過網路反覆疊代仍無法達到收斂,而提供的不佳的辨 識結果。 本研究剔除異常極大值的方法為,找到異常極大值的資料點,以同一條trace 下方的資料點代替,此方法根據地層的反射係數隨著深度變化為一個漸變的 過程,上下資料點只差0.004 秒的間隔,反射係數變化並不會太大,故以異常 值的下方資料點取代。 STEP3 除去極端異常值 本步驟為針對震波原始訊號與震幅強度,此二項和油氣出現與否的相關度很 高,偶爾會在圖面局部弱震幅的地區出現極大的震幅,純屬不合理現象,因 為強震幅出現通常為叢生,而並非單一出現,故本研究計算整張圖面震幅的 平均數μ與標準差σ,將平均值加減3σ以外的震波原始訊號與震幅強度,取 代為平均值加減3σ。 if 震波原始訊號 > μ+3σ,震波原始訊號=μ+3σ if 震波原始訊號 < μ-3σ,震波原始訊號=μ-3σ
STEP4 正規化 震測資料的值域分布範圍,會隨野地震波勘測、處理人員的不同而有不同的 值域範圍,如:震幅強度(Envelope)的範圍介於+20 到-20 之間,而震波阻抗 (Inversion Impedance)的範圍則介於 3,178,724 到 6,861,993 之間,為了降低 各種環境因素對辨識結果的影響,我們採取一種在類神網路上廣泛使用的前 處理方式正規化,意指將各特徵的最大值到最小值的分佈映射到1 到 0 之間, 將數據正規化後,任何一比震測資料經過四步驟的前處理都能當做網路輸入 加以訓練或回想,正規化的數學計算如下式,以瞬間頻率為例: 瞬間頻率’= 瞬間頻率 瞬間頻率 瞬間頻率 瞬間頻率
0≦瞬間頻率≦ 1 STEP5 建立各種特徵組合矩陣 本研究所選取的五項特徵為亮點相關的特徵,根據研究目的第三項,為了測試 出能提供最佳辨識率的特徵組合,本研究將測試五項特徵任何包含兩種特徵以 上的組合,共C C C C =26 種,我們將經前四步驟處理完之震測資料 分別依照 26 種不同的組合需求,儲存成 26 個.mat 檔案以便後續網路訓練作業。 圖 3.5 建立特徵組合矩陣
本研究所選取的特徵如下: 1. 震波原始訊號(Seismic Signal),以 S 代表 2. 震幅強度 (Envelope),以 A 代表 3. 瞬間相位(Instantaneous Phase),以 P 代表 4. 瞬時頻率(Instantaneous Frequency),以 F 代表 5. 逆推阻抗(Inversion Impedance) ,以 I 代表 26 種特徵組合如表 3.1: 表 3.1 特徵組合表 特徵組合 特徵組合 特徵組合 特徵組合 五個一組 SFAPI 四個一組 SFAP 三個一組 SAP 二個一組 SF SAI SA SFAI SPI SP FAP SI SFPI FPI FA FAI FP SAPI API FI SFA AP FAPI SFI AI SFP PI
第4章 倒傳遞網路
4.1 類神經網路介紹
類神經網路是以電腦來模擬人類腦神經細胞網路的科學,使用大量簡單的相連人工 神經元來模仿生物神經網路的能力,這樣的能力使得類神經網路成為機器學習中功能強 大的演算技術。與人類大腦相同功能的三大重要特性: 1、學習(Learning):適當的學習模式是類神經網路系統的基本條件,此功能讓類神 經網路在動態環境中發揮功效,能夠模擬系統的行為或特性。 2、回想(Recall) :回想過程指網路受到輸入刺激後產生相對應的輸出值;類神經網 路的效能與強健性,與其回想過程是否快速有效有關。 3、歸納推演(Generalization) :歸納推演法是從一個系統中局部觀察描述出其整體 特性的過程。 類神經網路具有上述優越的特性,並不表示類神經網路適合於各種問題上,適用於 一些傳統電腦或傳統模式處理成效不好,但人類卻可以輕鬆處理好的問題,即可嘗試使 用類神經網路來處理,例如辨識問題、複雜的天氣問題等。類神經網路( Neural Network ),起源於西元 1943 年由 Warren McCulloch 和 Walter Pitts 所共同描繪之第一個用於計算的神經元( Neuron ),並執行邏輯運算,開創了腦神經
科學理論研究的時代,在1957 年 Frank Rosenblatt 首先引用感知器( Perceptron )觀念來
模擬大腦感知與學習的兩大能力[22],類神經網路的發展首次出現學習之功能,但由於
感知器結構上的限制,它無法產生複雜的邏輯運算為Marvin Minsky 與 Seymour Papert
所詬病[23],類神經網路理論的發展進入黑暗期(AI Winter),自西元 1967 年至 1982 年。 但在這段黑暗期中仍有不少學者從事類神經網路的研究,此段期間陸續出現了 Teuvo Kohonen 所提出的自組織映射圖網路(SOM)、Stephen Grossberg 所提出的適應性 共振理論網路(ART)…等。西元 1986 年 Rumelhart、Minton 和 Williams 推導出多層
認知器Multilayered Perceptron (MLP),有效的解決了自西元 1960 年代以來主要類神經 網路的監督式學習(Supervised Training)的障礙,為類神經網路奠定發展的基礎,也由於 電腦運算速度的大幅提升,使得類神經網路計算速度增強而蓬勃發展至今。 類神經網路已經被訓練來執行許多複雜功能,其應用層面廣泛,如:系統識別 (Identification)、分類(Classification)、系統控制與圖形辨識(Pattern Recognition)。不僅用 於工程界,甚至廣泛運用至金融領域和教育領域。
1. 平行處理的特性 早期人工智慧平行處理的研究只集中在小程度的平行,而最近已朝向超大型方向 進行。類神經網路是以動物的樹狀神經網路為藍本的設計,原本因平行技術未成 熟而無法深入研究,現在因超大型平行處理的成熟及若干理論的發展,又成為人 工智慧中最活躍的研究領域。 2. 容錯特性(fault Tolerance) 其在操作上具有很高之容忍度,整個神經網路都會參與解決問題之運作。如果輸 入資料混雜少許雜訊干擾,仍然不影響其運作之正確。而且即使10%的神經網路 失效,仍能照常運作。 3. 結合式記憶的特性(Associative Memory)
其又稱為內容定址記憶(content addressable memory),它可以記憶曾經訓練過的輸 入樣式以及對應的理想輸出值。我們只要給予一部份的資料,便可以得到全部的 資料並且可以容忍錯誤,就像人類只要看到某一部份的影像可以回憶起全部的影 像,這便是結合式記憶的效果。 4. 解決最佳化問題(Optimization) 可用於處理非演算法表示的問題,或是以演算法處理很費時者。 5. 能處理一般演算法難以處理的問題 在 非 常 大 的 推 銷 員 問 題 中 , 為 了 增 加 效 率 起 見 , 我 們 可 利 個 個 擊 破 (divide-and-conquer)的方法,來求得一條正確可走的路徑。這是用傳統的方法所以 無法達到的。 6. 不需了解系統真正數學模型 不同於傳統需要分析輸出及輸入的數學關係,類神經網路不需要瞭解系統的數學 模型為何,而直接以神經網路取代系統的模型,一樣可以得到輸入與輸出之間的 關係。
4.2 探討亮點偵測之線性分割性
本研究初期採取線性可分割的類神經網路模式---感知器,於 1957 年 Frank Rosenblatt 所提出,是一種監督式的學習,為一種類神經網路中最簡易的網路型式,感知器結構如 圖4.1 所示,感知器網路中的每個神經元能將輸入的特徵向量畫分成兩個區域,簡單的 說感知器能在N 維的輸入特徵空間中找到 N-1 維的超平面(Hyperplane),來將特徵向量 分割成兩類,意指感知器的分類方式有限性可分割的限制,線性不可分割問題則無法處 理,最簡單的例子如: 典型互斥或(XOR)問題。 圖 4.1 感知器模型 圖 4.2 exclusive or problem(XOR)本研究將採用感知器(Perceptron)來試驗油氣儲集層亮點偵測問題是否為一種線性 可分割的問題,為了說明的方便性,我們選取前一章節所提出的亮點相關特徵中較為重 要的三項:震波原始訊號(S)、瞬間頻率(F)、震幅強度(A),於空間向量中展示。至於感知 器的訓練我們也採用上述的三項特徵向量去訓練。 如圖4.3 所見,由震波原始訊號、瞬間頻率、瞬間震幅夠成的空間中,紅色部分為 專家所定義為亮點,藍色為非亮點,中間網格狀灰色部分為感知器訓練完畢後的決策邊 界,法向量所指的正半空間為亮點區,另外負半空間為非亮點區,由圖面上可知處理線 性可分割問題的感知器尚能分類亮點與非亮點,但仍有部分無法,如圖4.3 上黃色圓圈 中所見原為亮點卻被誤認為非亮點而產生的型I 誤差,或如圖 4.4 上原為非亮點卻被誤 判為亮點而產生的型II 誤差(又稱為雜訊)。 故由此可知,亮點偵測雖尚可用線性可分割的感知器來分類,但將問題簡化為線性 可分割的結果就是犧牲部份的辨識率,為此,本研究將採取應用廣泛的倒傳遞路藉以解 決線性不可分割問題。 圖 4.3 線性不可分割圖(a) 圖 4.4 線性不可分割圖(b)
4.3 倒傳遞網路介紹
為了解決感知器無法解決線性不可分類的限制,80 年代 Rumelhart 和 McClelland 與幾位學者共同開發多層的感知器去解除限制[24]。而多層感知器中權重值的調整(或稱 學習法則)則是採用倒傳遞演算法(Back-propagation),係利用最陡梯度法(Steepest Descent)以性能指標(Performance)最大負梯度的方向更改網路權重,故傳統倒傳遞網路
又稱SDBP(Steepest Descent Back-propagation),接下來以三層網路( I-J-K,包含一隱藏
層)為例,來介紹倒傳遞網路演算法。 倒傳遞網路演算法為一種解決最佳化問題的演算方法,而既然名為最佳化,就 是需要一個用以衡量網路輸出結果為最佳的標準,於是我們將此標準就當作性能指標 (Performance)以大寫 E 表示,當結果輸出為良好時性能指標將會很小,而輸出結果較差 時指標將會變大,而倒傳遞網路一連串的迭代即是將此性能指標降到最低。 圖 4.5 傳統倒傳遞網路模型[25]
E =SSE(Sum Square Error) =
∑
Kd
o
=性能指標 d 為目標輸出,也就是期望的正確答案 o 為網路輸出 (1)性能指標建立完畢後即可開始由隱藏層倒傳遞至輸入層更改網路權重: s w o I o f s w w t 1 w t η ∂E ∂w η ∂E ∂s ∂s ∂w η ∂E ∂o ∂o ∂s ∂s ∂w η∂E ∂o f′ s o i=1,2,3…….I j=1,2,3……J ∂E ∂o ∂E ∂s ∂s ∂o ∂E ∂s ∂s ∂o … … … … ∂E ∂sK ∂sK ∂o ∂E ∂o ∂o ∂s ∂s ∂o ∂E ∂o ∂o ∂s ∂s ∂o … … … … ∂E ∂oK ∂oK ∂sK ∂sK ∂o = 2 d o f′ s w 2 d o f′ s w … … … … 2 d K oK fK′ sK wK = 2 ∑K d o f′ s w K (2)接著由輸出層倒傳遞至隱藏層更改網路權重: s w o J o f s η: 收斂係數、學習率 0 η<1 w w t 1 w t η ∂E ∂w η ∂E ∂s ∂s ∂w η ∂E ∂o ∂o ∂s ∂s ∂w η 2 d o f′ s o 2η d o f′ s o k=1,2,3…….K j=1,2,3……J4.4 傳統倒傳遞網路之缺點
但將傳統倒傳遞網路實地運用在問題解決上時,恐怕是個耗時的演算方法,原因乃 傳統倒傳遞網路所使用的更新權重方式為最陡坡降法,使用此方法在每次迭代過程中找 尋下一個更新方向時缺乏效率且耗時,如圖4.6,圖中十字所指為全域極小值,而傳統 到傳的網路收斂時卻容易落入了局部極小值。,且漫無目的的找尋更新方向容易落入局 部極小值,造成網路誤認為已經收斂而結束,或已達所設定的訓練次數,但所找到的最 佳解並非全域極小值而是局部極小值,圖4.7 為各種網路權重逐步收斂至全域極小值的 過程,每個小圓圈代表網路經一個iteration 迭代後的權重值,左邊為傳統倒傳遞網路 (SDBP),可看到經過多次的迭代(連續的圓圈)才收斂完畢,而共軛倒傳遞網路(CGBP) 每個iteration 的更新方向朝上次方向的共軛方向(2D 上為正交方向)去更新,三次就達到 全域極小值,而Levenberg Marquardt 倒傳遞網路(LMBP)則需要四次,稍多於共軛倒傳 遞網路。所以如何提高倒傳遞網路的收斂速度成為大家研究焦點[11][12]。 圖 4.6 傳統倒傳遞網路收斂圖 圖 4.7 各類倒傳遞網路收斂圖此外一般所提出的改善SDBP 的方法有兩類: 啟發式的改進、數值最佳化[11] 一、啟發式改進 1. 動量式倒傳遞網路(Momentum Back-propagation,MOBP) 網路收斂的軌跡來回震盪,若能平滑軌跡振盪,增加有效搜尋更新網路權 重的方向,減少無謂的振盪擺動就能提高收斂性,即是使用一個濾波器來幫 助減少振盪數目,而不改變權重變化時的平均值。 ∆w t γ∆w t 1 1 γ η∆w t γ:動量係數 0 γ 1 η: 收斂係數、學習率 0 η 1 由於權重更新時採用了動量項,使得演算法穩定的情況下可以使用較高的 收斂係數加速收斂,MOBP 的另一個特徵是收斂的軌跡方向漸漸一致後,會 加速收斂。
2. 可變學習率倒傳遞網路(Variable Learning Rate Back-propagation,VLBP) 收斂係數η的大小會影響收斂速度的快慢,η太小收斂速度慢,太大則快速 但有機會變過度修正,故更新權重需要一個時而快速時而緩慢的收線係數, 透過改變收斂係數來提高收斂效率,其規則如: 1 若性能指標在一個 iteration 迭代後增加了,且超過某個百分比ζ,則 權重更新取消,學習率被乘上一個因子ρ 0 ρ<1 。 2 若性能指標在一個 iteration 迭代後減少了,則權重更新將繼續,學習 率被乘上一個因子σ(σ>1)。 3 若性能指標在一個 iteration 迭代後增加了,但未超過百分比ζ,則學 習率保持不變。 二、數值最佳化
1. 共軛梯度倒傳遞網路(Conjugate Gradient Back-propagation,CGBP) 基本演算法為共軛梯度演算法,將在章節 4.5 介紹。
2. LevenbergMarquardt 倒傳遞網路(LMBP) 基本演算法為牛頓法,將在 4.6 介紹。
4.5 共軛倒傳遞網路介紹
傳統倒傳遞網路為最陡梯度法(Grediant Decent),每次疊代中網路權重值會朝著性能 函數(Performance Function)的最大負梯度方向移動,但若只是單純使用這個方法去搜尋, 時常會出現結果落入局部極小值或發散的情形,且訓練過程緩慢搜尋較沒效率,共軛梯 度法意指每次權重更新的方向會為共軛(2D 上為正交),使用共軛梯度法可以快速收斂與 避開落入極小值的風險[11]。 圖 4.8 SDBP 與 CGBP 收斂路徑比較圖 傳統倒傳遞網路更新方式: W W α P α :學習率 P g g ▽E(w)| 而共軛梯度法為傳統倒傳遞的變形 假設任何性能指標E(x)為一個二次函數,可表示為 E(w)= wTAw dw c E w g Aw d 此為梯度 紅色為 SDBP 綠色為 CGBPE w A E w E w … E w E w E w … E w E w E w … E w 此為赫森矩陣 因為共軛若且為若 pTAp 0,k≠j 指一個向量集合{p }對於一個赫森矩陣 A 相互共軛 取得一個赫森矩陣(Hessian) 第一次搜尋方向和傳統方式一樣,為性能函數的負梯度方向 P g g F(w)| 搜尋方向不再像傳統負梯度的方向,為一種隨著每次疊代的共軛梯度的方向 W W α P α :為一個變動的學習率,決定方式為 α TTA P g β P 更新共軛梯度的參數β 採用 Fletcher Reeve 法,定義為: β g Tg gT g 為一目前梯度平方與先前梯度平方的比值。
4.6 Levenberg-Marquardt 倒傳遞網路介紹
LM 演算法是一種利用標準的數值優化技術的快速演算法,它與擬牛頓法一樣不需 要計算赫森矩陣,而是利用下式進行估算[11]: 依照牛頓法定義, w w A g 其中g E w ,A E w 假設性能指標E(x)為平方函數之和 E w ∑N v w vT w v w ,v w d o e 梯度利用下式計算: g E w E 2 ∑N v w 2v w ∑N 雅可比矩陣(Jacobian Matrics) J ∑N … … N N … N g 2 J e 則赫森矩陣為: A 2 J J 式中,J 為 Jacobian 矩陣,包括網路誤差項相對於權重和域值的一階微分,e 為網 路的誤差項。Jacobian 矩陣可以利用標準的 BP 演算法得出,這比直接計算赫森矩陣簡 單得多。L-M 演算法的反覆運算式為: w w 2 JT x J x µ I 2 JT x v x w JT x J x μ I JT x v x 如果比例係數µ=0,則為牛頓法,如果 µ 取值很大,則接近梯度下降法,每反覆運 算成功一步,則µ 減小一些,這樣在接近誤差目標的時候,逐漸與牛頓法相似。牛頓法 在接近誤差的最小值的時候,計算速度更快,精度也更高。許多研究已證明,採用甚至 該方法可以較原來的梯度下降法提高速度幾十甚至上百倍。第5章 網路測試
5.1 網路測試流程介紹
測試流程如圖5.1 所示共分成五個步驟,如下: STEP 1 震測剖面圖資蒐集完畢後先經第三章所提出的特徵抽取與前處理方式,將 震測剖面圖資依照訓練組和測試組分成兩類處理,並定義兩組的應出現亮 點的正確答案(二元圖)。 STEP 2 類神經網路設計,共分成四:三層 BPCG、三層 BPLM、四層 BPCG、四層 BPLM。 STEP 3 將訓練組資料帶入已設計完畢之網路以訓練網路並輸出網路。 STEP 4 將測試組資料帶入所輸出的網路,最後輸出亮點辨識結果圖(二元圖)。 STEP 5 根據特徵抽取及前處理時所定義的測試組亮點辨識正確答案來計算亮點 辨識結果圖的各項辨識率。 圖 5.1 測試流程圖5.2 震測資料介紹
在震測資料解釋人員解釋之前,震測剖面圖要經過一連串震測資料處理的程序,將 野地蒐集來的原始資料經地球物理相關分析與訊號處理,最後才將處理完畢的震測圖資 交由震測資料解釋,資料解釋的精準度往往取決於資料處理的優劣,故用以代替震測資 料解釋人員的類神經網路訓練也需要處理程序較好震測圖資加以訓練,本研究將蒐集震 測資料處理較為完美之圖資,用於類神經網路訓練與測試,期望達到較優良的亮點偵測 結果。 本研究經訪談後所蒐集到震測資料處理過程較為優質的測線資料,共四條: 官田氣田 1. 隆田測線:當作本研究主要訓練組資料,屬官田氣田。 2. 官田測線:當作本研究主要測試組資料,用以測試官田氣田用於網路訓練結果, 和隆田測線屬同一氣田。 新營氣田 3. 新營 A:當作本研究次要測試組資料,用以測試其他區域測線是否適用本亮點 偵測法,詳細介紹於6.4 節。 4. 新營 B:未使用。 針對較主要的兩條訓練組與測試組資料做介紹,台灣油氣蘊藏與生產大多集中在竹 苗等北部地區,然而對於南部的探測工作,一直未曾停歇。震測資料解釋員由震測剖面 圖中發現,在隆田構造淺部二重溪層構造高區有震幅增強、頻率變低之異常現象,可能 有油氣存在之可能性,於民國93 年間,先後打井並電測所推測油氣的是否存在,證實 井二重溪層中之696 公尺~705 公尺(稱第 1 產氣層)及 846 公尺~852 公尺(稱第 2 產氣 層)有良好的含氣砂層值得進一步測試,經地層測驗結果,天然氣含量豐富,含量高達 99%以上具有開採價值,因此將台南縣的隆田構造命名為「官田氣田」[26][27]。 官田氣田所包含的測線相關位置圖如下圖5.2 所示(俯視),隆田測線(訓練組)為縱向 分佈,官田測線(測試組)為橫向分佈,兩者相交地區為發現由氣所在之位置,故兩條測 線在目標位置同樣具有雙產氣層的現象。圖 5.2 官田、隆田測線俯視圖 但一張完整震測剖面圖所擁有之資料點之大恐怕使網路訓練過程變得耗時、無效率, 一張震測剖面圖有數十萬個資料點,而為亮點的資料點只有六到八百個,所以我們將只 擷取部分資料點做為訓練與測試之樣本點,參考表5. 1,以類神經網路訓練角度,隆田 測線提供17500 個訓練樣本,其中亮點樣本數為 879(5.12%),非亮點樣本數 =16603(94.88%),官田測線提供了 15000 個測試樣本,其中亮點樣本數為 600(4.00%), 非亮點樣本數為14400(96.00%)。 表 5.1 擷取測線基本資料 測線 隆田測線(訓練組) 官田測線(測試組) 列 行 列*行 列 行 列*行 原始圖 資料點數 502 1302 653,604 501 371 185,871 擷取之 樣本點數 100 [151~250] 175 [800~974] 17,500 100 [151~250] 150 [20~169] 15,000 樣本點數 佔總樣本比例 樣本點數 佔總樣本比例 亮點 897 5.12% 600 4.00% 非亮點 16603 94.88% 14400 96.00%



![圖 2.6 震測資料處理流程圖[14]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8204540.169667/22.892.162.783.173.1056/圖26震測資料處理流程圖14.webp)
![圖 2.7 典型油氣儲集層地理模型[15] 圖 2.8 震測剖面圖上的典型油氣儲集層[15] 2. 平點(Flat Spot) 為震測剖面圖上一個水平的正震幅,乃由於含油砂層中與含氣砂層兩者間氣液 介面會出現隨水平面延伸的平整現象,圖 2.9 箭頭所指向之微小正震幅近乎 水平的地方即是平點。](https://thumb-ap.123doks.com/thumbv2/9libinfo/8204540.169667/24.892.203.773.110.468/上一個水平由於含油砂層中與含氣砂層兩者間氣介面會出現隨平點.webp)
![圖 2.9 平點[15] 3. 暗點(Dim Spot) 為一個局部性的震幅縮小,被假設為油氣儲集層的出現。暗點的出現通常伴隨 孔隙率較小的儲集岩或受壓縮力量較大的砂層。一般認為人工震波從頁岩進入 砂延時會產生強震幅,但油氣儲集層的出現卻使得聲波阻抗降低而成了暗點。 4](https://thumb-ap.123doks.com/thumbv2/9libinfo/8204540.169667/25.892.256.725.102.482/為一個局部性儲集岩或受壓縮力量較大的砂層一般認為人工震波出現.webp)
![圖 2.10 相位反轉[15] 5. 頻率改變(Frequency Change) 油氣儲集層由於介質的改變通常伴隨著較低頻率的出現,主要是由於震波勘測 所釋放出的人工震波行經油氣儲集岩層時波速減慢,我們無法從震測剖面圖上 直接觀測到地層頻率改變,仍需要經過震測資料的訊號處理才能讓震測資料解 釋人員判讀。 6](https://thumb-ap.123doks.com/thumbv2/9libinfo/8204540.169667/26.892.197.775.107.732/所釋人工震波行經油氣儲集岩層時波速減慢我們無法從震測處理才能.webp)
![圖 2.11 速度低垂[15] 7. 陰影帶(Shadow Zone) 也是較為少見的指標,存在於油氣儲集層下方由於震波經過儲集層後,人工震 幅的能量因為經過介質密度低的地層之後被吸收,產生下方能量較為微弱,震 測剖面圖上出現的是瑣碎零散的震幅訊號,圖 2.11 與圖 2.12 儲集層下方也有 陰影帶的出現。 8](https://thumb-ap.123doks.com/thumbv2/9libinfo/8204540.169667/27.892.181.796.109.466/陰影帶因為經過介質密度低的地層之後被吸收產生下方能量較陰影帶.webp)
![圖 2.12 氣囪[15]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8204540.169667/28.892.252.723.122.526/圖212氣囪15.webp)
