無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III)─三維空間定位模組強化
169
0
0
全文
(2) 無線射頻辨識(RFID)於設施與設備 維護管理之應用研究(III) ― 三維空間定位模組強化. 內 政 部建 築研 究 所協 同 研 究 報告 中華民國 98 年 12 月.
(3) 無線射頻辨識(RFID)於設施與設備 維護管理之應用研究( I I I ) ― 三維空間定位模組強化. 研究主持人:何明錦 所長 協同主持人:柯千禾 助理教授 研 究 員:蔡嘉章 博士 研 究 助 理 :鍾能富 王韋傑 研 究 人 員 :簡文聖. 內 政 部建 築研 究 所協 同 研 究 報告 中華民國 98 年 12 月.
(4)
(5) 目次. 目次 表次 ............................................................................................................ V 圖次 ......................................................................................................... VII 摘要 ...........................................................................................................XI 第一章 緒論 ............................................................................................... 1 第一節 研究動機 ........................................................................... 1 第二節 研究目的 ........................................................................... 3 第三節 研究範圍與內容............................................................... 4 第四節 研究流程與方法............................................................... 4 第二章 文獻回顧 ....................................................................................... 7 第一節 RFID 簡介 ......................................................................... 7 第二節 RFID 設施設備維護管理資訊系統............................... 10 第三節 三維空間定位模組......................................................... 15 第四節 無線電波簡介................................................................. 27 第五節 地理資訊系統................................................................. 34 第六節 虛擬實境 ......................................................................... 40 第七節 類神經網路 ..................................................................... 41 第三章 室內無線感測網路建構............................................................. 45 第一節 定位技術 ......................................................................... 45 第二節 定位模式 ......................................................................... 45 第四章 三維空間定位模組強化............................................................. 47 第一節 無線射頻訊號干擾分析................................................. 47 I.
(6) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 第二節 提升定位精度架構......................................................... 57 第三節 三維虛擬實境建構......................................................... 60 第四節 單一標籤訊號實測......................................................... 64 第五節 參考標籤輔助定位模式................................................. 69 第六節 類神經網路定位............................................................. 76 第七節 案例說明 ......................................................................... 80 第五章 模式驗證 ..................................................................................... 95 第一節 驗證案例說明................................................................. 95 第二節 參考標籤輔助定位....................................................... 100 第三節 類神經網路定位........................................................... 116 第四節 定位顯示 ....................................................................... 117 第五節 定位結果比較............................................................... 119 第六章 定位方案分析 ........................................................................... 123 第一節 定位方案 ....................................................................... 123 第二節 成本分析 ....................................................................... 125 第七章 結論與建議 ............................................................................... 127 第一節 結論 ............................................................................... 127 第二節 建議 ............................................................................... 128 附錄一 第一次會議記錄 ................................................................... 131 附錄二 第二次會議記錄 ................................................................... 133 附錄三 第三次會議記錄 ................................................................... 135 附錄四 第四次會議記錄 ................................................................... 137 II.
(7) 目次. 附錄五 期中報告審查意見回覆....................................................... 139 附錄六 期末報告審查意見回覆....................................................... 141 參考書目 ................................................................................................. 143. III.
(8) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. IV.
(9) 表次. 表次 表 2-1 主動定位法和被動定位法比較............................................... 27 表 2-2 無線電波頻率表 ....................................................................... 28 表 4-1 I-PORT M Q 讀寫器規格 ........................................................ 48 表 4-2 I-A9185 天線規格 ..................................................................... 49 表 4-3 TAG I-Q8 L 標籤規格.............................................................. 50 表 4-4 編號 132 標籤於材料實驗室中之訊號測值........................... 56 表 4-5 一維定位訊號測值記錄表 ....................................................... 72 表 4-6 三維定位訊號測值記錄表 ....................................................... 74 表 4-7 B 天線走廊實測值 .................................................................... 82 表 4-8 C 天線走廊實測值 .................................................................... 83 表 4-9 B 天線會議室實測值 ................................................................ 87 表 4-10 C 天線會議室實測值 .............................................................. 89 表 4-11 案例說明訓練資料 ................................................................. 91 表 4-11 案例說明訓練資料(續) .......................................................... 92 表 5-1 天線座標 ................................................................................... 98 表 5-2 參考標籤座標 ........................................................................... 98 表 5-3 A 天線參考標籤測值記錄表 .................................................. 101 表 5-3 A 天線參考標籤測值記錄表(續) ........................................... 102 表 5-4 B 天線參考標籤測值記錄表 .................................................. 103 表 5-4 B 天線參考標籤測值記錄表(續)............................................ 104 表 5-5 C 天線參考標籤測值記錄表 .................................................. 105 表 5-5 C 天線參考標籤測值記錄表(續) ........................................... 106 V.
(10) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 表 5-6 D 天線參考標籤測值記錄表 .................................................. 107 表 5-6 D 天線參考標籤測值記錄表(續) ........................................... 108 表 5-7 目標標籤 RSSI ....................................................................... 109 表 5-8 參考標籤輔助定位模式誤差 ................................................. 111 表 5-9 類神經網路定位結果 ............................................................. 117 表 5-10 未使用參考標籤輔助定位誤差........................................... 119 表 5-11 前一階段演算法定位誤差 ................................................... 120 表 5-12 強化方法定位誤差比較 ....................................................... 121 表 6-1 定位方案 ................................................................................. 124 表 6-2 定位方案比較 ......................................................................... 125 表 6-3 RFID 設備價目表 ................................................................... 126 表 6-4 設備組合價格比較 ................................................................. 126. VI.
(11) 圖次. 圖次 圖 1 研究流程與方法 ........................................................................ XII 圖 1-1 研究流程與方法 ......................................................................... 5 圖 2-1 電子標籤實品圖 ......................................................................... 9 圖 2-2 讀寫器實品圖 ............................................................................. 9 圖 2-3 典型的 RFID 系統 ................................................................... 10 圖 2-4 RFID 設施設備維護管理資訊系統架構 ................................ 11 圖 2-5 RFID 設施設備維護管理資訊系統登錄畫面........................ 12 圖 2-6 管理資料模組主功能選單 ....................................................... 12 圖 2-7 購買金額圓形圖 ....................................................................... 13 圖 2-8 維護保養排程結果 ................................................................... 14 圖 2-9 預測故障模組畫面 ................................................................... 15 圖 2-10 Trilateration 定位概念示意圖 ............................................... 21 圖 2-11 Triangulation 定位概念示意圖.............................................. 22 圖 2-12 Time of Arrival 示意圖 .......................................................... 23 圖 2-13 Time Difference of Arrival..................................................... 23 圖 2-14 Angle of Arrival 示意圖 ......................................................... 24 圖 2-15 主動定位法 ............................................................................. 25 圖 2-16 被動定位法 ............................................................................. 26 圖 2-17 無線電波基本架構圖 ............................................................. 28 圖 2-18 RSSI 定位架構 ........................................................................ 30 圖 2-19 橫波與縱波 ............................................................................. 31 圖 2-20 電波反射、折射或繞射示意圖............................................. 31 VII.
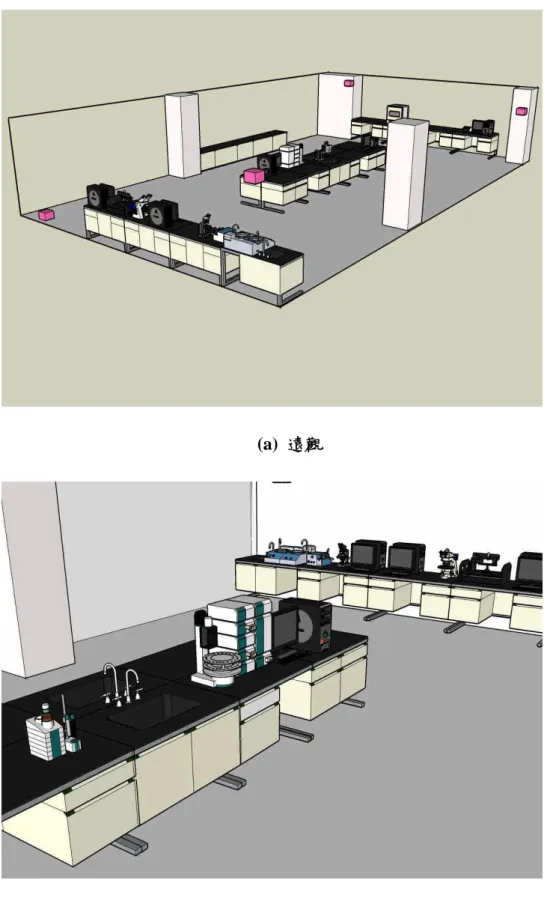
(12) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 圖 2-21 電波干涉 ................................................................................. 33 圖 2-22 極化 ......................................................................................... 34 圖 2-23 GIS 功能圖 .............................................................................. 35 圖 2-24 GIS 架構 .................................................................................. 37 圖 2-25 Web GIS 架構圖...................................................................... 39 圖 2-26 類神經網路 ............................................................................. 43 圖 3-1 三維室內無線感測網路 ........................................................... 46 圖 4-1 i-PORT M Q RFID 長距讀寫器.............................................. 48 圖 4-2 本研究所採用之 i-A9185 天線架............................................. 49 圖 4-3 TAG i-Q8 L 標籤....................................................................... 50 圖 4-4 走廊訊號衰減測試 ................................................................... 51 圖 4-5 會議室訊號測試 ....................................................................... 51 圖 4-6 藝文中心訊號測試 ................................................................... 52 圖 4-7 體育館訊號測試 ....................................................................... 52 圖 4-8 材料實驗室場強強度實測 ....................................................... 54 圖 4-9 材料實驗室場強強度實驗配置............................................... 55 圖 4-10 編號 132 標籤於材料實驗室中之訊號分佈......................... 57 圖 4-11 三維空間定位模組強化架構 ................................................. 58 圖 4-12 材料實驗室配置 ..................................................................... 61 圖 4-13 接觸角儀器 ............................................................................. 62 圖 4-14 切割機 ..................................................................................... 62 圖 4-15 拋光機 ..................................................................................... 63 圖 4-16 離子層析儀 ............................................................................. 63 VIII.
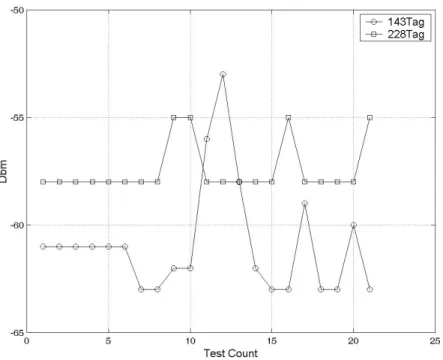
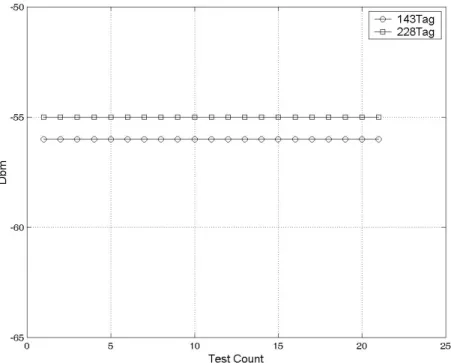
(13) 圖次. 圖 4-17 自動滴定儀 ............................................................................. 64 圖 4-18 走廊訊號測試:一次喚回單一 tag ...................................... 65 圖 4-19 走廊訊號測試:一次喚回多個 tag ...................................... 65 圖 4-20 會議室訊號測試:一次喚回單一 tag .................................. 66 圖 4-21 會議室訊號測試:一次喚回多個 tag .................................. 66 圖 4-22 藝文中心訊號測試:一次喚回單一 tag .............................. 67 圖 4-23 藝文中心訊號測試:一次喚回多個 tag .............................. 67 圖 4-24 體育館訊號測試:一次喚回單一 tag .................................. 68 圖 4-25 體育館訊號測試:一次喚回多個 tag .................................. 68 圖 4-26 參考標籤輔助定位模式流程................................................. 70 圖 4-27 一維定位測試系統配置 ......................................................... 71 圖 4-28 三維定位測試系統配置 ......................................................... 73 圖 4-29 RF 等高線圖............................................................................ 75 圖 4-30 定位標籤可能位置 ................................................................. 75 圖 4-31 類神經網路定位流程 ............................................................. 76 圖 4-32 量測定位資料示意圖 ............................................................. 77 圖 4-33 定位模式架構 ......................................................................... 78 圖 4-34 走廊實測 ................................................................................. 81 圖 4-35 走廊定位測試系統配置 ......................................................... 81 圖 4-36 會議室實測 ............................................................................. 84 圖 4-37 參考標籤配置 ......................................................................... 85 圖 4-38 RF 等高線圖(B 天線) ............................................................. 88 圖 4-39 RF 等高線圖(C 天線) ............................................................. 90 IX.
(14) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 圖 5-1 材料實驗室 ................................................................................ 95 圖 5-2 材料實驗室既有設備配置平面圖........................................... 96 圖 5-3 RFID 天線架設三維空間示意圖 ............................................. 96 圖 5-4 RFID 天線固定架 ..................................................................... 97 圖 5-5 RFID 天線與固定架 ................................................................. 97 圖 5-6 RFID 天線安裝 ......................................................................... 99 圖 5-7 RFID 參考標籤配置 ............................................................... 100 圖 5-8 A 天線定位 RF 等高線 ........................................................... 112 圖 5-9 B 天線定位 RF 等高線 ........................................................... 113 圖 5-10 C 天線定位 RF 等高線......................................................... 114 圖 5-11 D 天線定位 RF 等高線 ......................................................... 115 圖 5-12 三維空間定位模組主畫面 ................................................... 118 圖 5-13 定位結果顯示 ....................................................................... 118. X.
(15) 摘要. 摘要 關鍵詞:設施設備維護、無線射頻辨識、定位、空間定位演算法、三維空間地 理資訊系統 一、研究緣起 妥善使用資訊科技可提升設施設備管理效益並降低維護成本,96 年協辦案 「無線射頻辨識(RFID)於設施與設備維護管理之應用研究」 ,運用 RFID 與網際 網路科技發展查核管理技術,於研究過程中發現設施、設備與器具之定位為實 驗室管理人員迫切之需求,97 年協辦案接續 96 年成果增加「三維空間定位模 組」 ,此模組雖可定位設施、設備與器具之三維空間位置,但目標位置之呈現方 式與定位精準度仍有改善空間。 本研究目的為運用 3D 虛擬實境並考慮四周環 境所造成之訊號衰減,提升「三維空間定位模組」定位呈現方式與定位精準度。. 二、研究方法及過程 本研究之研究流程與方法如圖 1 所示,首先確認「三維空間定位模組」之 缺點,在確認研究問題與可能之解決方法後建立研究目的,本研究主要目的為 運用 3D 虛擬實境並考量四周環境所造成之電波訊號衰減,改善「三維空間定 位模組」 ,強化其顯示效果與定位精準度,為使研究焦點更具體,主要針對於具 重複使用性質之建築設備與設施進行研究,並以內政部建築研究所位於台北市 景美之建築材料實驗中心為例進行規劃。接者,使用 3D-Web-GIS 三維圖形建 置工具,以內政部建築研究所位於台北市景美之建築材料實驗中心材料實驗室 為規劃對象,建立虛擬實境。此外,透過文獻回顧探討提升定位精度之方法並 分析其可行性,本研究考量環境對無線電波訊號所造成之干擾,藉由參考標籤 建立空間訊號衰減分佈,發展參考標籤輔助定位模式。最後,依據研究目的所 達成之成效提出結論,並針對未來研究與改善方向提出說明。. XI.
(16) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 1.確認研究問題. 2.建立研究目的. 3.定義研究範圍. 4.回顧相關文獻. • 3D建模 • 3D-Web-GIS. 5.建構虛擬實境. 7.研擬定位精度改 善方法. • 3D設計. 6.建立三維圖形. 8.發展參考標籤 輔助定位模式. 9.運行空間定位模 組. • 電磁學 • 基本電波 • 改善訊號方法 • 其他搭配 RFID方式 • 演算法 • 天線 系統 架設 • 參考標籤佈置 • 單 一標籤訊號 • 訊號 衰減 模式 • RFID硬體 • 精準度比較 • 建研所材料實驗室. 10.提出結論與建 議. 11.撰寫研究報告. 圖 1 研究流程與方法 (資料來源:本研究整理). 三、重要發現 1. 應用 3D 虛擬實境可藉由相對參考物品使定位目標呈現方式更具體,減 少維護管理人員尋找設施設備時間,提升設施設備維護管理績效。 2. 無線訊號容易受環境影響,運用參考標籤訊號輔助定位標籤,可獲得較 合理之衰減訊號,提升定位精準度。 3. RF 空間定位採用「一次只喚回單一標籤」之訊號讀取方式,可減少訊號 XII.
(17) 摘要. 碰撞問題,提高標籤讀取率並獲得較穩定之訊號,進而提升定位精準度。 4. 天線功率影響訊號衰減強度與距離之鑑別度,合宜之天線功率可提昇定 位精準度。 5. 本研究所研擬之「三維空間定位模組強化」考量 RF 訊號受環境影響, 運用參考標籤輔助定位,並採用「一次只喚回單一標籤」與合適之天線功率, 可將定位誤差由 3.4 米降低至 2.2 米,具體提升「三維空間定位模組」精度約 1.2 米。 6. 定位方案選擇應考量應用主題、定位精度、建置時間、設置成本、定位 維度、維護成本等因素,方可獲得經濟且適合應用主題之方案。 四、主要建議事項 1. 本研究所發展之「三維空間定位模組強化」以參考標籤訊號修正 RSSI, 於定位過程中須逐一讀取參考標籤數值,如何減少參考標籤讀取時間並兼顧定 位精度為未來可持續研究之議題。 2. 定位空間中電波場域分佈具有特定模式,可運用類神經網路學習電波場 域分布後分析定位目標位置,但類神經網路之訓練資料並無考量 RF 受環境影 響之變化,其適用性仍有待研究,未來可進一步探討如何將環境影響之變化納 入人工智慧技術,提升定位精度。 3. 未來可於定位空間中增設濾波器,減少 RF 訊號誤差。 4. 未來可推廣研究成果,將研究成果商品化,進一步將三維空間定位模組 應用至其他領域,例如:實驗試體定位與管理、實驗材料追蹤定位、人員安全 管制、現場管理等。. XIII.
(18) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. XIV.
(19) 摘要. ABSTRACT Keywords: facility and equipment maintenance, Radio Frequency Identification (RFID), location sensing, spatial positioning algorithms, 3D-GIS Application of information technology has been proven effective in facility/equipment maintenance. Research phase I developed a facility/equipment maintenance system using Radio Frequency Identification (RFID) technology. A necessity of locating equipments was identified while developing the maintenance system. A RFID-based 3-D positioning module was therefore established following the research phase I. Two drawbacks were identified in the research phase II, namely: 1) locating objects in the 3D-Web-GIS system are displayed using pushpins that may not visually represents the 3D locations and 2) it has not considered the environmental impact on Radio Frequency resulting an average locating error 337 cm. The objective of the study (phase III) is to enhance location sensing accuracy by considering the environmental impact on Radio Frequency. To improve positioning accuracy, a framework was investigated according to literature review and RF experiments. Positioning objects are then represented using 3D technology. Three RF technologies were used to take into account the environmental impact: 1) pinging one RFID tag at a time to avoid RF signal collision, 2) adjusting appropriate antenna power for the location sensing space, 3) adjusting target tag signal using reference tags. The performance of above methods was verified using four locations. Experimental results show that combing those three methods can reduce positioning error from 337 cm to 219 cm.. XV.
(20) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. XVI.
(21) 第一章 緒論. 第一章 緒論 第一節 研究動機 台灣可利用的土地資源有限,建築物之稠密度逐年增加,在考量老舊建築 物拆除重建之高額成本下,可藉由提升設施設備維護管理績效,延長建築物使 用年限並維持其應有之功能1,2。RFID 被列為二十世紀十大重要技術項目之一 3. ,其利用 IC 及無線電來存放與傳遞辨識資料,具有耐環境、可重複讀寫、非. 接觸式、資料記錄豐富、可同時讀取範圍內多個 RFID Tag 等特性4,已成為提 升設施設備維護管理績效之新穎科技5。 第一年研究「無線射頻辨識於設施與設備維護管理之應用研究(I)」運用 RFID 與管理資訊系統技術 5,依據設施設備維護管理需求,建構設施設備維護 管理架構與資訊系統平台,該研究以景美材料試驗中心為例,發展「RFID 設 施設備維護管理資訊系統」 ,所開發之系統包含「管理資料模組」 、 「統計分析模 組」、「維護保養排程模組」與「預測故障模組」,於第一階段研究過程中發現 RFID 結合管理資訊系統技術,可減少設施設備維護管理所需之時間與人力, 此外,除目前現有功能外,實驗設備與器具之定位為管理人員迫切之需求。 第二年研究「無線射頻辨識於設施與設備維護管理之應用研究(II) ―三維空 間定位模組」6,以第一階段所發展之「RFID 設施設備維護管理資訊系統」為. 1. Ba r c o , A. L.( 1994) .“ Budgeting for facility repair and maintenance.”J ou r n a lofMa n a g e ment in Engineering, 10(4) 28-34. 2 Djerdjouri, M. (2005).“ Assessing and benchmarking maintenance performance in a manufacturing facility: A data envelopment analysis approach.”I NFOR,43 ( 2)1 21-133. 3 Hunt, V.D., Puglia, A., and Puglia, M. (2007). RFID-A Guide to Radio Frequency Identification. Wiley-Interscience. 4 Fon t e l e r a ,J .( 2 005 ) .“ RFI De x pl or a t i on . ”Conv e r t i n gMagazine, 23(9) 28-32. 5 葉世文、柯千禾、林谷陶、張維傑、汪士弘、賴宜和(2007),無線射頻辨識(RFID)於設施與設備 維護管理之應用研究,研究報告,內政部建築研究所,台北,台灣。 6 何明錦、柯千禾、林谷陶、洪泰儒、鍾能富、蔣衛仁、劉育燕(2008),無線射頻辨識(RFID)於設 1.
(22) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 基礎,依據實驗室管理人員需求建立「三維空間定位模組」 ,該模組運用固定式 RFID 讀寫器、參考標籤與目標標籤,配合空間資訊演算法分析實驗設備與器 具之位置,並將計算結果透過 3D-Web-GIS 顯示,協助實驗人員管理實驗設備, 研究過程中發現「三維空間定位模組」尚有下列問題有待改善: 1.未完善考量 RFID 空間定位因素:精準的定位除仰賴定位演算法外,仍 須考慮四周環境對無線電波訊號所造成之衰減,方可獲得更合理的回饋接收訊 號強度,進而精準定位。97 年第二年期協辦案僅演算法定位目標位置,定位精 度約為 340 公分,標準差約為 115 公分,尚有改善空間。 2.空間呈現效果不具體:雖然「三維空間定位模組」以 3D-Web-GIS 顯示 定位目標空間位置,但缺乏相對參考物品,仍然無法具體呈現定位目標於空間 中之位置。 3.定位呈現效果不具體:現階段成果以 pushpin 顯示定位位置,維護管理人 員雖可以滑鼠點選 pushpin 瀏覽設施、設備與器具之詳細資料,但顯示方式缺 乏具體圖示,維護管理人員無法於定位完成後立即透過顯示圖形瞭解設施設備 資訊。 近年已有學者運用 RFID 技術於空間定位,Lionel 等學者運用主動式 RFID 技術搭配指引標籤(Reference Tags)於空間定位7,該研究指出應用主動式 RFID 於室內定位為可行且經濟的選擇;Yun 等學者運用 RFID 無線網路於鋼鐵工廠 8. ,偵測人員移動位置以避免災害發生,該研究證明 RFID 可用於即時顯示移動. 施與設備維護管理之應用研究(II)─三維空間定位模組之建構,研究報告,內政部建築研究所, 台北,台灣。 7 Lionel, M.N., Liu, Y.H., Lau, Y.C., Patil, A.P. (2004). “ LANDMARC: Indoor location sensing using active RFID.”Wireless Networks, 10(6) 701-710. 8 Yu n ,K. ,Ch oi ,S. ,Ki m,D.( 2006) . “ Ar obu s tl oc a t i ont r a c k i n gu s i ngu bi qui t ousRFI Dwi r e l e s s network. ”Le c t u r eNot e si nCompu t e rSc i e n c e ,Pr oc e e di n g soft h eTh i r dI n t e r n a t i on a lCon f e r e n c eon Intelligence and Computing, 4159 113-124. 2.
(23) 第一章 緒論. 位置,並減少災害發生;另有學者運用 RFID 於方向9、物料10、物品11等定位, 顯示 RFID 技術為解決實驗設備與器具定位可行之方法。. 第二節 研究目的 本研究目的為運用 3D 虛擬實境顯示定位空間,並考量環境對無線電波訊 號所造成之干擾,改善「三維空間定位模組」 ,以強化其顯示效果與定位精準度, 協助管理人員定位、搜尋相關實驗設備與器具,進而提升設施設備維護管理績 效;為有系統達成上述目的,研究目的分為五點說明如下: 1.建立三維空間虛擬實境:為強化「三維空間定位模組」顯示效果,本研 究運用虛擬實境技術,建立定位空間中設施、設備與器具之三維圖形,使 3D-Web-GIS 藉由相對參考物品呈現更具體之定位效果,此外,以真實之定位 目標圖示顯示定位物品,協助維護管理人員透過圖形快速瞭解設施設備資訊。 2.匯整提升無線射頻辨識定位精準度方法:探討改善無線射頻辨識定位精 準度方法並分析其可行性。 3.分析定位空間電磁場強度:獲得精準的天線與標籤距離為提升空間定位 精準度的關鍵因素,本研究實際量測定位空間電磁場強度,以充分瞭解定位空 間內 RFID 訊號傳遞與訊號受干擾狀況。 4.建立定位空間無線訊號衰減分佈:真實定位空間的干擾源多且複雜,不 易由電波理論分析干擾模式,本研究藉由參考標籤建立空間訊號衰減分佈,以. 9. Hi n s k e ,S.( 2007) .“ De t e r mi ni n gt h epos i t i ona n dor i e n t a t i onofmu l t i -tagged objects using RFID t e c h n ol ogy . ”Pr oc e e di n g sof the Fifth Annual IEEE International Conference on Pervasive Computing and Communications Workshops, 377-381. 10 Li m, A.a n dZh a ng ,K. C.( 2006) .“ Ar obu s tRFI D-ba s e dme t h odf orpr e c i s ei n doorpos i t i on i ng . ” Lecture Notes in Computer Science, Proceedings of the 19th International Conference on Industrial, Engineering and Other Applications of Applied Intelligent Systems, 4031 1189-1199. 11 Ha y a s h i ,H. , Ts u ba k i , T. ,Oga wa , T. ,Sh i mi z u ,M.( 2003) .“ As s e tTr a c k i n gSy s t e mUs i ngLong-life Ac t i v eRFI DTa g s . ”NTT Technical Review, 1(9) 19-26. 3.
(24) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 獲得較符合實際狀況的無線訊號衰減曲線。 5.發展參考標籤輔助定位模式:依據定位空間無線訊號衰減分佈,考量電 波訊號受環境干擾情況,發展參考標籤輔助定位模式,進而提升定位精準度。. 第三節 研究範圍與內容 本研究針對於具重複使用性質之建築設備與設施,運用 RFID 技術收集管 理設施設備資料,並以內政部建築研究所位於台北市景美之建築材料實驗中心 為例,將 RFID 導入實驗中心所使用之設施與設備維護管理。設施與設備包含 設施、設備與傢俱三大部分,設施係指一棟建築或地方為了提供特定的服務或 特定的工業用途;設備定義為作一項工作或服務所需要的工具;傢俱依教育部 國語辭典定義為家庭所用的器具,如桌椅、櫥櫃等。此外,為提昇設施設備維 護管理效率,本研究將維護管理績效定義為完成維護管理作業所需之人力與時 間。 運用 RFID 於空間定位須仰賴諸多讀寫器與參考標籤(Reference Tags),於 有限經費限制下,本研究僅針對材料實驗室進行探討。. 第四節 研究流程與方法 本研究之研究流程與方法如圖 1-1 所示,詳細說明如下: 1.確認研究問題:本研究為接續 97 年協辦案研究成果,針對「三維空間定 位模組」之缺點予以改善與強化。 2.建立研究目的:在確認研究問題與可能之解決方法後建立研究目的,本 研究主要目的為運用 3D 虛擬實境並考量四周環境所造成之電波訊號衰減,改 善「三維空間定位模組」 ,強化其顯示效果與定位精準度,協助管理人員定位、 搜尋相關實驗設備與器具,進而提升設施設備維護管理績效,為有效達成此目 4.
(25) 第一章 緒論. 的,本研究於該步驟建立研究次目標。 3.定義研究範圍:為使研究焦點更具體,主要針對於具重複使用性質之建 築設備與設施進行研究,並以內政部建築研究所位於台北市景美之建築材料實 驗中心為例進行規劃。 4.回顧相關文獻:此步驟透過學術期刊、研討會論文集、書籍、網路資料 與研究報告等,瞭解電磁學與基本電波理論,此外,回顧國內外有關改善 RFID 訊號之方法,作為後續發展之基礎。 1.確認研究問題. 2.建立研究目的. 3.定義研究範圍. 4.回顧相關文獻. • 3D建模 • 3D-Web-GIS. 5.建構虛擬實境. 7.研擬定位精度改 善方法. • 3D設計. 6.建立三維圖形. 8.發展參考標籤 輔助定位模式. 9.運行空間定位模 組. • 電磁學 • 基本電波 • 改善訊號方法 • 其他搭配 RFID方式 • 演算法 • 天線 系統 架設 • 參考標籤佈置 • 單 一標籤訊號 • 訊號 衰減 模式 • RFID硬體 • 精準度比較 • 建研所材料實驗室. 10.提出結論與建 議. 11.撰寫研究報告. 圖 1-1 研究流程與方法 (資料來源:本研究整理) 5.
(26) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 5.建構虛擬實境:使用 3D-Web-GIS 三維圖形建置工具,以內政部建築研 究所位於台北市景美之建築材料實驗中心材料實驗室規劃對象,建立虛擬實境。 6.建立三維圖形:本步驟進一步運用三維圖形建置工具,建立材料實驗室 設施、設備、傢俱與工具之三維圖形。 7.研擬定位精度改善方法:藉由文獻回顧探討提升定位精度之方法並分析 其可行性。 8.發展「參考標籤輔助定位模式」 :本研究考量環境對無線電波訊號所造成 之干擾,藉由參考標籤建立空間訊號衰減分佈,發展參考標籤輔助定位模式。 9.運行空間定位模組:以內政部建築研究所位於台北市景美之建築材料實 驗中心為例,實際運行本研究所發展之「參考標籤輔助定位模式」。 10.提出結論與建議:依據研究目的所達成之成效提出結論,此外,亦針對 未來研究與改善方向提出說明。 11.撰寫研究報告:最後將本研究執行流程、成果與研究發現撰寫成研究報 告。. 6.
(27) 第二章 文獻回顧. 第二章 文獻回顧 第一節 RFID 簡介 RFID 無線識別標籤(Radio Frequency Identification, RFID)是一種非接觸式 自動識別系統,它是利用無線電波來傳送識別資料,一組射頻識別系統由標籤 與讀寫器組成,標籤上裝有電路,讀寫器從一段距離外間歇發射能量給標籤讀 寫器交換訊息,標籤基本上是在一塊矽晶片上加裝簡單的天線,然後以玻璃或 塑膠組件封裝而成。 第二次世界大戰期間,英國軍方首先發展非接觸技術,以識別從歐洲大陸 返回英國本島的飛機是友機還是敵機;此一系統稱為 IFF 敵我辨識系統(Identify Friend or Foe),也就是在英國飛機上會產生一個信號,當飛機接近英國本島時, 若接收到此一信號,表示是友機,否則視為敵機,此一 IFF 敵我辨識系統,也 成為首次使用的無線射頻射頻辨識系統,並一直使用在今日的航空流量管制上。 1977 年左右,隸屬於美國政府的洛薩拉摩斯國家實驗室(Los Alamos National Laboratory)開始發展非接觸技術,並嘗試於牛隻身上植入無線射頻標籤 (電子標籤),以進行追蹤牛隻之實驗。80 年代初期,開始有公司著力於減少尺 寸和成本的降低,以便能將無線射頻技術嵌入員工卡之內,取代傳統鑰匙的使 用,並進行資料存取與實際的門禁管制應用,以增加員工進出的便利性與安全 性12。 隨著矽晶片技術的發展與一些大廠如德州儀器(TI)於 1989 年的 TlRIS 無線 射頻系統組件之開發,無線射頻電子標籤與讀寫器的成本已大幅降低,也使得. 12. 蘇永勝,以無線射頻網路建構之管制藥品管理資訊雛形系統,2005,國立成功大學工程科學系 碩士班,碩士論文。 7.
(28) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 無線射頻系統的應用領域越來越廣,目前無線射頻系統的相關產品已普遍應用 在日常生活中,如台北捷運系統的悠遊卡、汽機車的晶片鑰匙、門禁管制系統、 商店常用的防盜標籤、生產線自動化、物料管理、寵物身上植入的識別晶片、 高速公路電子收費等。 RFID 系統架構可分為標籤、讀寫器與系統應用三大部分: (一)電子標籤(Tag) 以電池的有無區分為被動式和主動式兩種,如圖 2-1 所示。 1.主動式:有電池,系統另外增加喚醒裝置,平時處於休眠的狀態,當標 籤進入喚醒裝置的範圍時,喚醒裝置利用無線電波或磁場來觸發或喚醒標籤, 這時才進入正常工作模式,開始傳送相關資訊,由於本身具備工作所需之電源 所以傳輸距離較長一般為 30m~100m ,但是相對具有體積較大、需更換電池及 成本較高等缺點。 2.被動式:被動式 Tag 是接收讀寫器所傳送的能量,轉換成電子標籤內部 電路操作電能,不需外加電池,可達到體積小、價格便宜、壽命長以及數位資 料可攜性等優點,目前被動式以 UHF 感應距離最遠,干擾源較少的場合約可達 約 3m~5m。 (二)讀寫器(Reader/writer) 利用高頻電磁波傳遞能量與訊號,電子標籤的辨識速率每秒可達 50 個以 上,外型如圖 2-2 所示。. 8.
(29) 第二章 文獻回顧. 圖 2-1 電子標籤實品圖 (資料來源:http://www.regalscan.com.tw/,帝商科技,2007). 圖 2-2 讀寫器實品圖 (資料來源:http://www.regalscan.com.tw/,帝商科技,2007). 9.
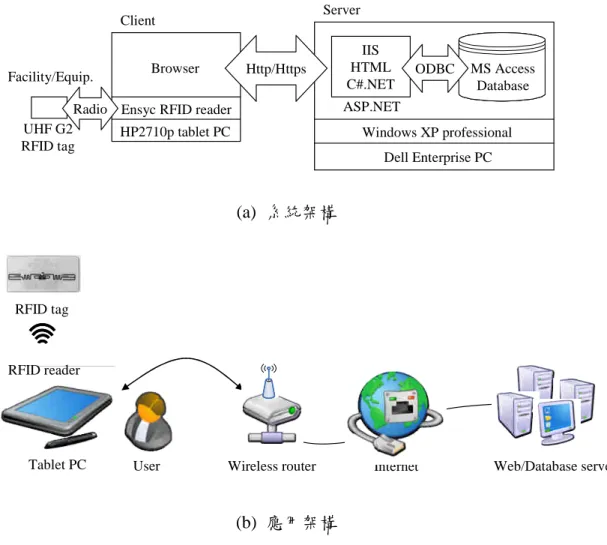
(30) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. (三)系統應用 RFID 系統結合資料庫管理系統、電腦網路與防火牆等技術,提供全自動 安全便利的即時監控系統功能,如圖 2-3 所示。. 圖 2-3 典型的 RFID 系統 (資料來源:日式料理店從漁船至餐桌黑鮪魚可追溯示範系統之建立,邱俞 婷, 2006). 第二節 RFID 設施設備維護管理資訊系統 96 年協辦案「無線射頻辨識(RFID)於設施與設備維護管理之應用研究」開 發「RFID 設施設備維護管理資訊系統」5,此系統為運用 RFID 與網路技術所 開發之電腦系統,系統架構如圖 2-4 所示,該系統可透過網頁提供多人同時進 行維護管理,系統主畫面如圖 2-5,該系統包含四個模組供使用者維護管理設 施設備,各模組分述如下:. 10.
(31) 第二章 文獻回顧. Server. Client. Facility/Equip.. Browser. Http/Https. ODBC. MS Access Database. ASP.NET. Radio Ensyc RFID reader UHF G2 RFID tag. IIS HTML C#.NET. HP2710p tablet PC. Windows XP professional Dell Enterprise PC. (a) 系統架構. RFID tag. RFID reader. Tablet PC. User. Wireless router. Internet. Web/Database server. (b) 應用架構 圖 2-4 RFID 設施設備維護管理資訊系統架構 (資料來源:無線射頻辨識(RFID)於設施與設備維護管理之應用研究,葉世 文等,2007). 11.
(32) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 圖 2-5 RFID 設施設備維護管理資訊系統登錄畫面 (資料來源:無線射頻辨識(RFID)於設施與設備維護管理之應用研究,葉世 文等,2007). (一)管理資料模組 提供使用者管理相關資料,包含使用者、新增設施與設備資料並產生 RFID 編碼、查詢資料等,模組畫面如圖 2-6。. 圖 2-6 管理資料模組主功能選單 (資料來源:無線射頻辨識(RFID)於設施與設備維護管理之應用研究,葉世 文等,2007). 12.
(33) 第二章 文獻回顧. (二)統計分析模組 本模組運用統計圖表,如圓形圖(Circle Graphs)、肩形圖(Ogive)、長條圖(Bar Chart)等,顯示資料庫資料分布,模組畫面如圖 2-7。. 圖 2-7 購買金額圓形圖 (資料來源:無線射頻辨識(RFID)於設施與設備維護管理之應用研究,葉世 文等,2007). (三)維護保養排程模組 維持設施與設備的正常功能有賴於定期的維護保養,如不定期檢查維護有 可能因部份零件損壞而導致設備無法正常運作,甚至縮短設備使用壽命,因此 設備必須定期的檢查,以維持其應有之功能,設備中若有損耗性零件,則必須 定期的更換及維修,維護保養作業安排以總維護時間最小化為目標,藉由縮短 檢查時間,增進設施設備的維護保養效率,模組畫面如圖 2-8。. 13.
(34) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 圖 2-8 維護保養排程結果 (資料來源:無線射頻辨識(RFID)於設施與設備維護管理之應用研究,葉世 文等,2007). (四)預測故障模組 RFID 設備如果有損耗性零件,則每隔一段時間就必須進行維修或更換, 然而,零件的使用壽命因環境及材料的特性而有所不同,經由專家訪談得知, 零件的使用壽命受到設備的使用時間、使用頻率、使用間隔時間、溫度、溼度 等因素的影響,而且在不同的情況下,各個影響因素的重要性會有所改變,為 避免設施設備於維護保養前損壞,影響其應有之功能,該模組主動預測設施設 備可能損壞之時間防範未然。該模組使用模糊類神經網路作為預測方法,透過 模糊類神經的學習模式,藉由歷史資料自動調整各個影響因素的重要性,進而 提升預測準確度,模組畫面如圖 2-9。. 14.
(35) 第二章 文獻回顧. 圖 2-9 預測故障模組畫面 (資料來源:無線射頻辨識(RFID)於設施與設備維護管理之應用研究,葉世 文等,2007). 第三節 三維空間定位模組 (一) 定位技術 常用的定位技術包含 GPS、Cell ID、紅外線、IEEE 802.11、超音波、超寬 頻、Zig Bee 與無線射頻辨識,各技術分別說明如下: 1.全球衛星定位系統(Global Positioning System, GPS) 全球衛星定位系統(GPS),為美國國防部 1973 年開始發展,主要是提供使 用者全天候準確的定位資訊。GPS 系統可以分為 3 大部分,包括使用者 (User Segment)、太空部分 (Space Segment)及控制部分 (Control Segment),使用者在 接收到一連串的 GPS 衛星訊號,經由接收器在接收過程中與 GPS 衛星訊號的 電碼取得同步後,辨識出 GPS 衛星的編號,接收器在取得衛星訊號發送到接收 的時間差後,計算 GPS 衛星與使用者之間的距離。太空部分則是指這些分佈 15.
(36) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 在外太空的 GPS 衛星,每個 GPS 衛星,透過原子鐘取得時間同步,以 GPS 時 間作為參考時間,藉此與使用者進行定位計算。控制部分則負責對 GPS 衛星所 發送的訊號進行監測,並上傳導航資料至衛星中,並由主控站彙集全部的觀測 資料、計算各衛星軌道與時鐘參數,以確保 GPS 定位系統的精準13. 14. 。. GPS 定位技術雖然有較高的準確度,但於室內環境所接收到的訊號較弱, 於較低樓層或遮蔽物較多之位置將無法適用。 2.Cell ID(Cell Identification) Cell ID 是無線通訊定位最基本的方式之一,通訊原理為利用蜂巢式無線通 訊系統架構,每個基地台的涵蓋範圍就像一個細胞一樣,使用者僅需知道相關 基地台的地理位置,就可以知道大約物品所在位置15。運用 Cell ID 的優點在於 定位技術不需要複雜的演算或是接收許多相關的定位資料,適合快速定位而且 大範圍的地區,然而,Cell ID 受限於基地台架設的限制,一般而言,使用 Cell ID 的定位精準度範圍大約在數百公尺到數十公里,較適合室外大規模定位,在 偏遠地區或者人煙稀少的地方,因基地台之架設較為分散,將造成定位出來的 涵蓋範圍變大,也較不準確16。 3.紅外線 (Infrared) 紅外線定位技術起源於 Olivetti 實驗室,在 Olivetti 實驗室(現為 AT & T Cambridge Lab)運用漫射紅外線 (Diffuse Infrared) 技術發展 Active Badge 的定. 13. Arends, John (2004). A GPS Primer, Concrete Producer, v 22, n 2, February,p 73-76. Toran, F. , Ventura-Traveset, J., and Basker, S. (2006). The Global Positioning System (GPS), European Space Agency, v 1303, December, p 21-34. 15 Wigren, Torbjorn (2007). Adaptive enhanced cell-ID fingerprinting localization by clustering of precise position measurements, IEEE Transactions on Vehicular Technology, v 56, n 5, September, p 3199-3209. 16 Roos, T., Myllymaki, P., Tirri, H. (2002). A statistical modeling approach to location estimation, IEEE Transactions on Mobile Computing, v 1, n 1, , p 59-69. 14. 16.
(37) 第二章 文獻回顧. 位系統17,其紅外線使用的方法為,在固定一段時間內發送紅外線訊號,藉由 接收紅外線反射到的時間推估至量測物的距離,但紅外線僅能作直線行進,此 外,紅外線傳輸距離短、易受太陽光的干擾、建構成本高等問題,使得紅外線 於室內定位的應用受到限制。 4.WiFi (Wireless Fidelity) (IEEE 802.11) WiFi 為 IEEE 802.11b 的別稱,該名稱為無線乙太網相容聯盟(Wireless Ethernet Compatibility Alliance, WECA)所命名,中文譯為「無線相容認證」。 WiFi 是一種短程無線傳輸技術,能夠在數百英尺範圍內支持互聯網接入的無線 電信號,隨著技術的發展,以及 IEEE 802.11a 及 IEEE 802.11g 等標準的出現, IEEE 802.11 統稱為 Wi-Fi。 Wi-Fi 定位技術從架構可以分為基地台型(Network Based)與手機型(Handset Based)兩大類,基地台型是由各基地台將手機上傳的信號資訊傳送至一台定位 系統電腦做定位運算,手機型則是將基地台的資料下載於手機直接定位,而定 位常見的方法包含 TOA、TDOA、AOA 與 RSSI18,詳細內容將於定位演算法 章節介紹。 最早以 IEEE 802.11 規格所建立的定位系統為 RADAR19,該系統主要概念 是將實際測量的過程與訊號增殖模型(Signal Propagation Model)結合運算,由訊 號強度推算未知物件的實際位置。運用 RADAR 的主要優點架設方便,僅需要 在適合無線網路運作的室內環境中,架設數個無線基地台即可,而其主要的缺 點在於被追蹤的未知物本身也要支援相關的設備 (例如:802.11 規格的網路. 17. Wa n t ,R. ,Hoppe r , A. ,Fa l c ã o, V. ,a n dGi bbon s ,J .( 19 92) . “ Th eAc t i v eBa dg eLoc a t i onSy s t e m, ” ACM Transactions on Information Systems, 10(1) 91-102. 18 鄭同伯,802.11 完全剖析無線網路技術,博碩文化股份有限公司,第 692-702 頁,2004。 19 Ba h l ,P .a n dPa dma n a bh a n , V.N.( 20 00) . “ RADAR: AnI n -building RF-based User Location and Tr a c k i n gSy s t e m. ”Pr oc e e di n gsofI EEEI NFOCOM 2000, Tel-Aviv, Israel. 17.
(38) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 卡),於小型應用或者是可用電量有限的被追蹤物上不易達成。截至 2001 年 HighTower 與 Borriello (2001)的研究報告顯示,RADAR 在實際運用的效能並不 如預期20。 5.超音波(Ultrasonic) 超音波的定位系統是利用超音波借由介質傳遞,於傳遞過程產生反射、折 射及繞射等物理特性,運用 Time-of-Flight 測量技術計算未知物的位置,例如 Cricket Location 定位系統與 Active Bat 定位系統21。超音波儀器於量測距離過 程中先發送一個超音波,觀察反射及折射的音波,包含音波的波型等,產生相 對應的影像,由於環境中每個物品皆由不同物組成,故能造成不同的剖面,而 達到定位的目的,在效能上,超音波定位系統有優越的準確度,Cricket 可以在 一個 4 英尺*4 英尺的室內空間有很高的準確率,而 Active Bat 可以在 9 公分的 涵蓋範圍內,有 95% 的準確率,然而,建構超音波定位系統所需要的設備成 本較高,不容易實際應用。 6.超寬頻 (Ultra-Wideband) UWB(Ultra-Wideband) 是屬於該標準規格下的產品,具有高速傳輸、低成 本與低耗電力優點,有別於傳統無線通訊技術,UWB 並不使用連續的正弦波 (Sine Waves)來傳送資料,而是以快速發出脈衝(Impulse)的方式來進行資料傳 輸,並採取時間調變方式,該方法主要應用於軍事雷達的偵測系統22。 相較於其他無線通訊技術,超寬頻系列產品也有其開發上的優勢與劣勢. 20. Hi g h Towe r ,J .a n dBor r i e l l o, G.( 200 1) .“ ASu r v e ya n dTa x on omyofLoc a t i onSe n s i ngSy s t e msf or Ubi qu i t ou sCompu t i n g , ”CSE01-08-03, University of Washington, Department of Computer Science and Engineering, Seattle, WA, USA. 21 Priyanth a ,N. B. ,Ch a k r a bor t y , A. ,a n dBa l a k r i s hn a n ,H.( 20 00) .“ Th ec r i c k e tl oc a t i on -support s y s t e m. ”Pr oc e e di n gsofMOBI COM 2000, ACM Pr e s s ,Bos t on ,MA,32-43. 22 ITRI- Ta i wa n ,“ Ul t r a Wi de Ba n d技術分析與機會探索. ”h ttp://ieknet.itri.org.tw/, 2005。 18.
(39) 第二章 文獻回顧 23. ,在優勢上,由於超寬頻是夾在 WiFi 與藍芽世代之間的無線技術,因此在應. 用市場上會有互相重疊的部分,在初期成本上超寬頻比 WiFi 與藍芽晶片來得 高,但是在高傳輸速率上(100Mbps 以上),卻比起 802.11g (54Mbps)與高速藍芽 (10Mbps)高上許多,在其發展的劣勢上,UWB 在規格上仍未有最終統一的標 準,此外,目前技術仍有瓶頸,如可能與其他的通訊技術(例如:手機通訊)互 相干擾、資料傳輸距離不夠、僅適用大空間等,再者,初期開發成本龐大,這 些都是尚待克服的課題。 7.Zig Bee Zig Bee 為一種低功率消耗、架構簡單、低傳輸速率、高擴充性的網路結構 與短距離傳輸的通訊技術。Zig Bee 目前選用之頻率為 868/915MHZ 及 2.4GHZ 這三個頻率,資料傳輸的速度約在 20Kbps 至 250Kbps,可由選取之頻帶決定。 傳送的距離範圍為 100 公尺,網路的架構為星狀網路或點對點傳輸24,25。 Zig Beej 無線技術具有以下幾項特色: (1)省電、低耗能:Zig Bee 的傳輸速率較低,傳輸的資料也較小,因此資 料傳送時間短,以一般的電池來說,可使用長達 6 個月到 2 年。 (2)可靠度高:當傳送端有資料要傳送時立刻傳送,每個封包由接收端負責 確認收到,假如接收端沒有收到訊息回覆則表示發生封包碰撞,將再傳送一次, 此機制可提升資料傳送之穩定度。 (3)擴充性高:一個 Zig Bee 的網路可以包含 255 個節點,透過 Network Coordinator 整個網路將可增至 64000 個節點。. 23. De n i s e ,“ 超寬頻 UWB 技術現狀與趨勢分析. ”h t tp://www.eedesign.com.tw/, 2005。 林山霖,Zigbee 技術發展現況,電子設計資源網,2005。 25 “ 802. 15. 4–2003: Wireless Medium Access Control (MAC) and Physical Layer (PHY)specifications for Low Rate Wireless Personal Area Networks (LR-WP ANs ) , ”I EEE. 2 003. 24. 19.
(40) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 8.無線射頻辨識(RFID) RFID 室內定位系統是由 HighTower 與 Borriello 於 2001 年提出 20,該研究 發展 SpotON 定位系統驗證 RFID 於室內定位之可行性,在 SpotON 的方法中, 未知物件的定位並沒有經過系統中央控管的過程,而是由其他硬體規格相同的 感測點,以分散式計算的方式來完成,這些分散在感測環境之中的感測點會將 其接收訊號強度(RSSI)資料集合並回報,最後以定位演算法計算出未知物件的 預測位置。 在定位技術上,RFID 適合做會員卡、識別門禁管制、重要物品與人的追 蹤及管理,此外,RFID 可取代紅外線條形碼,並可追蹤目標物的動向,節省 人力,提升管理績效。 (二) 定位概念 無線感測網路定位概念可分為 Trilateration 和 Triangulation 兩種,說明如 下: 1.Trilateration Trilateration 定位概念如圖 2-10 所示,該定位概念至少需要三個訊號發射 塔且發射塔位置已知,假設每個節點所發出的信號為圖中圓圈所涵蓋的範圍, 訊號發射塔的座標分別為(X=0,Y=0)、(X=2,Y=0)與(X=1,Y=1),三個節點涵蓋範 圍為 r1、r2 與 r3,利用三個節點所交叉範圍即可計算出未知物位置26,若將此 概念運用於四個以上訊號發射塔則稱為 Multilateration。. 26. Holger Karl, Andrea sWi l l i g ,“ Pr ot oc ol sa n dAr c h i t e c t u r e sf orWi r e l e s sSe n s or Ne t wor k s , ”J oh n Wiley & Sons, Inc., 2005. 20.
(41) 第二章 文獻回顧. X=1,Y=1. r3. r1. X=0,Y=0. 定位目標. r2. X=2,Y=0. 發射台. 圖 2-10 Trilateration 定位概念示意圖 (資料來源:本研究整理). 2.Triangulation 此概念為使用三角函數的線段與角度的關係定位,該定位概念至少需要二 個訊號發射塔(如圖 2-11 所示)且發射塔之位置為已知,定位目標節點分別會接 收到發射台所回傳的信號,構成一個三角關係,透過兩兩訊號形成的角度,運 用式 2-1 計算定位目標的位置27,28。. 27. J e h os h u aBr u c k ,J i eGa o, Anx i a o( An dr e w)J i a ng ,“ Loc a l i z a t i ona n dRou t i n gi nSensor Networks by Loc a l An gl eI nf or ma t i on , ”Pr o c e e di n gsoft h e6t hACM international symposium on Mobile ad hoc networking and computing MobiHoc'05, pp.181 –192, May 2005. 28 翁偉峰,無線感測器網路定位系統之實現,2006,南台科技大學資訊工程系,碩士論文。 21.
(42) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. θa c. b. θb. θc a. 定位目標. 發射台. 圖 2-11 Triangulation 定位概念示意圖 (資料來源:本研究整理). c 2 a 2 b 2 2ab cos θc. (2-1). (三) 定位演算法 常用的定位演算法可分為 TOA、TDOA 與 AOA 三種,分別說明如下: 1.Time of Arrival (TOA) Time of Arrival (TOA)也稱為 Time-of-Flight26,此方法是以傳送訊號時由讀 寫器到接收目的端所需的時間,亦即利用所傳遞訊號速度的時間來計算距離, 例如藉由接收紅外線反射時間推估至量測物的距離(如圖 2-12 所示),此方式可 以廣泛的應用在 WiFI、802.11、超音波、紅外線、聲波、無線射頻辨識等定位 技術。. 22.
(43) 第二章 文獻回顧. t. 物體. 超音波. 發射 接收. 圖 2-12 Time of Arrival 示意圖 (資料來源:本研究整理). 2.Time Difference of Arrival (TDOA) TDOA 和 TOA 最大的差異在於使用多個不同定位技術方式來來比較其時 間差 26,TOA 只使用單一傳送方式來計算時間,而 TDOA 則是使用兩個以上不 同的定位技術計算距離,如圖 2-13 所示,超音波和聲波有不同傳送速度,發射 端同時發射超音波和聲波,透過接收器所接受超音波和聲波的時間差 t 計算距 離。. 超音波. 發射. 物體. 接收 聲波. 發射 接收 t. 圖 2-13 Time Difference of Arrival (資料來源:本研究整理). 23.
(44) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 3.Angle of Arrival (AOA) AOA 是利用待測物品所發射出的訊號至接收器的方位角度來計算位置。首 先透過方向性天線判別信號的方向,再利用至少二個固定接收器的方向性天線 來計算待測物的位置,便能取得待測物的位置資訊。運用此方法,方向性天線 的準確度影響定位精準度,通常一個內含雙元件的天線陣列只能掃描 120 度, 所以要涵蓋 360 度則需要六個元件的陣列天線。雖然 AOA 的定位較為精準, 但現有的無方面性天線無法執行全方位角的偵測,故須在每個讀寫器安裝方向 性的陣列天線,大幅提升定位所需成本29。. P(X p ,Yp ). θb. θa. A(X a,Ya). 定位目標. B(X a,Y b ). 發射台. 圖 2-14 Angle of Arrival 示意圖 (資料來源:本研究整理). 29. 沈子貴,以可程式系統晶片發展平台實現無線網路室內定位之分析與應用,國立成功大學電機 工程學系,碩士論文,2005。 24.
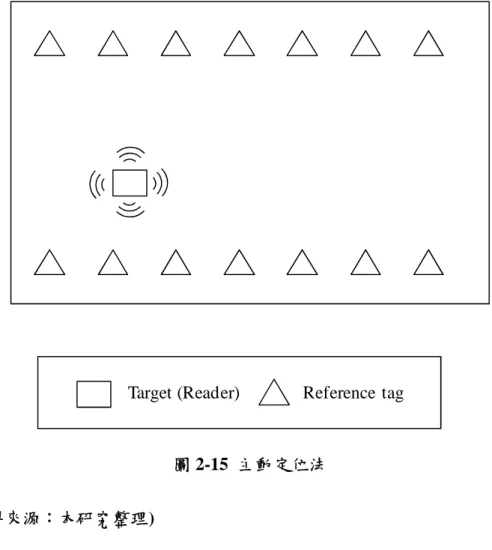
(45) 第二章 文獻回顧. (四) RFID 定位模式 RFID 定位模式可分為主動法與被動法,說明如下: 1.主動定位法 主動定位法如圖 2-15 所示,定位物體裝設天線,定位空間裝設被動式 RFID 標籤(參考標籤),定位物品啟動周圍參考標籤後,依據標籤座標計算定位目標 位置。該模式定位目標需要裝設 RFID 天線,並配合大量參考標籤進行定位, 此外,若定位目標距離參考標籤太遠或周圍參考標籤不足時,誤差率就會大幅 提升。. Target (Reader). Reference tag. 圖 2-15 主動定位法 (資料來源:本研究整理). 25.
(46) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 2.被動定位法 被動定位法如圖 2-16 所示,與主動法相反,被動定位法之定位目標裝設主 動式 RFID 標籤,定位空間內放置 RFID 天線作為參考座標,若採用 Trilateration 定位至少要需要 3 個以上的天線方可計算位置。. Reader. Reference tag. Target tag. 圖 2-16 被動定位法 (資料來源:本研究整理). 主動定位法和被動定位法比較如表 2-1,主動定位法適用於貴重物品的精 準定位,每一個定位目標皆須裝設天線,定位計算通常於定位目標端運算,因 此可縮短定位時間,但定位目標增加時所需的成本也會大幅提升。被動定位法 則適用於一般物品管理,一個天線負責運算多個標籤所傳回的訊號,相對的定 位運算時間較長,但當定位點增加時,只需加購標籤即可定位,較具應用潛力。 26.
(47) 第二章 文獻回顧. 表 2-1 主動定位法和被動定位法比較 主動定位法. 被動定位法. 定位目標物. 天線. 標籤. 參考點. 標籤. 天線. 參考點的部署. 天花板和地面. 四周. 定位目標. 適用單個. 適用多個. 定位時間. 短. 長. 定位精度. 高. 低. (資料來源:本研究整理). 第四節 無線電波簡介 本研究以電子標籤所接受之無線電訊號強度值(RSSI),作為位置感知 (Location-Awareness)計算的基礎,無線電技術是透過無線電波或射頻波傳播信 號的技術,無線電波是指在自由空間(包括空氣和真空)傳播的電磁波,其頻 率 在 300GHz 以下 ,至於 頻率下限 並無統一 規定 ,常見的有三種範圍 : 3KHz~300GHz、9KHz~300GHz、10KHz~300GHz(如表 2-2 所示)。其原理運用 導體中電流強弱所產生之無線電波,通過變壓器將訊息加載於無線電波之上, 當電波通過空間傳播到達收信端,電波引起的電磁場變化會在導體中產生電 流,透過調製器(Adaptor)解譯收信端導體所產生之電流變化,達到訊號傳遞的 目的30,其基本架構如圖 2-17 所示。 天線發射的電波越強,發射機所產生的電流也越大,同時電波也越強,而 經過一個週期的距離,頻率越高波長則越短,頻率與波長為反比關係,如果頻 率增加一倍,波長則減半,相反的頻率減半,波長便加倍 30。. 30. “ 無線電全球媒體研究室. ”http://globalmedia.wikia.com/wiki/無線電。 27.
(48) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 表 2-2 無線電波頻率表 頻率. 波長. 縮寫. 名稱. 3HZ~30HZ. 100000Km~10000Km. ELF. 極低頻. 30HZ~300HZ. 10000Km~1000Km. SLF. 超低頻. 300HZ~3000HZ. 1000Km~100Km. ULF. 特低頻. 10KHz~30KHz. 100Km~10Km. VLF. 甚低頻. 30KHz~300KHz. 10Km~1Km. LF. 低頻. 300KHz~3000KHz. 1Km~100Km. MF. 中頻. 3MHz~30MHz. 100m~10m. HF. 高頻. 30MHz~300MHz. 10m~1m. VHF. 甚高頻. 300MHz~3000MHz. 1m~100cm. UHF. 特高頻. 3~30GHZ. 100cm~10cm. SHF. 極高頻. 30~300GHZ. 10cm~1mm. EHF. 極高頻. 0.3~3THz. 1mm~0.1mm. 極超高頻. (資料來源:國際電信聯盟(International Telecommunication Union, ITU)). 斷路器 天線. 電容. 電流. 電源. 電流. 變壓器 無線電波傳輸. 發射機 天線. 圖 2-17 無線電波基本架構圖 (資料來源:本研究整理). 28. 線圈.
(49) 第二章 文獻回顧. (一) 無線電波訊號 本研究透過定位標籤(Target Tag)和參考標籤(Reference Tag)的無線電波接 收訊號強度(Received Signal Strength Indicator, RSSI),計算定位標籤與讀寫器之 距離,以下針對 RSSI 獲得方式與定位架構說明。 1.接收訊號強度 無線電波接收訊號強度(RSSI)為接收無線電信號強度數值,此數據由接收 端量測所接收到的無線訊號強度,再將接收訊號強度回傳發射端,即可依照訊 號的強弱來判斷所發射的電波與接收端的距離,每個鄰近的讀寫器都可以透過 發射的無線電波強弱來判斷各個節點與接收端的相對位置。一般來說,運用 RSSI 計算距離不需外加電路且可以微調發射功率,因此,使用 RSSI 不但可比 其他技術更加節省電源,更可獲得較精準的定位31。表示無線電波強弱常用的 單 位 為 瓦 特 (W) , 瓦 特 (W) 代 表 電 子 設 備 每 秒 消 耗 或 是 發 射 多 少 功 率 (Power/Second), 瓦特 可轉換為 dBm (Decibels),轉換方式為 dBm=10 log (P2/P1),其中 P2 為量得的電波瓦特數,P1 為固定參考電波強度 1mW32。 2.RSSI 定位架構 目前常見的無線定位技術中,RSSI 兼具經濟與容易建構的特點. 19,33,34,35. ,. RSSI 定位架構如圖 2-18 所示,運用 RSSI 定位需要配合多個信號強度,經由訊. 31. Patwari, N.; Ash, J.N.; Kyperountas, S.; Hero, A.O., III; Moses, R.L.; Correal,N. S. ,“ Locating the nodes: cooperative localization in wireless sensor networks,” Si gn a lPr oc e s s i ngMa g a z i n e ,I EEE, Volume 22, pp.54 –69, Issue 4, July 2005. 32 禹帆,無線通訊網路概論: GSM, GPRS, 3G, WAP, Application,文魁資訊,2002。 33 Patwari, N; Hero, A. O. III; Perkins, M.; Correal, N.S.a ndO’ De a ,R.J .,“ RelativeLocation Estimation in Wireless Sensor Networks,”I EEETr a n s a c t i onsonSi g n a l Pr oc e s s i ng ,Vol .51, No. 8, p2137-P2148, Aug 2003。 34 林永松、俞瑩珍、余俊達等,室內無線區域網路定位服務演算法與系統架構之研 8 4 究,主動 式網路研討會 2003,No.25,2003。 35 劉伯池,利用接收信號強度估測手機位置之方案研究,國立高雄第一科技大學碩士論文,2004。 29.
(50) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 號強度計算距離,並搭配空間資訊運算法求得定位座標。. RSSI. 計算距離. 空間演算. 座標. 圖 2-18 RSSI 定位架構 (資料來源:本研究整理). (二) 特性簡介 電場的改變會產生磁場,磁場變化亦可產生電場,電場與磁場相互感應即產生 電磁波,電磁波頻率在 109Hz 以下者定義為電波36。 電波主要特性如下37: 1.電波為橫波:強度垂直於波的前進方向變化,如圖 2-19 所示;而空氣與 物質振動波屬縱波,強度與波的前進方向平行。. 36. 簡淑韻,提昇射頻辨識即時定位系統精準度之方法,國立陽明大學醫學工程研究所碩士論文, 2006。 37 田中平,基本電波學理論及應用,復漢出版社,1993。 30.
(51) 第二章 文獻回顧 波前進方向. 波前進方向. 振幅變化. 振幅變化. (a) 橫波. (b) 縱波. 圖 2-19 橫波與縱波 (資料來源:本研究整理). 2.電波為光速。 3.介質為均質時向前進。 4.介質不為均質時會在不同介質交接處反射、折射或繞射,如圖 2-20 所示。. 反射. 折射 繞射. 圖 2-20 電波反射、折射或繞射示意圖 (資料來源:本研究整理). 5.在自由空間,電力隨距離平方衰減(Attenuation),如式 2-2 所示,其中, 31.
(52) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 波長 λ ( m) 的電波在距離 d (m)之處衰減量為 L。 2 L=( 4πd/ λ ). (2-2). 6.干涉:電波彼此間會互相影響,同相增強,逆向減弱,如圖 2-21 所示, A 波與 B 波產生 C 波,振幅相同的兩個波相位為 0 度;相位為 180 度時兩波相 抵消為零。 7.電場與磁場彼此正交。 8. 極 化 : 電 場 (磁 場 )方 向 為 一 致 方向 稱 為線 性 偏 波 (Linearly Polarized Wave),如圖 2-22 (b)所示;電場(磁場)方向隨時間、場所變化的電波稱為橢圓 偏波(Elliptically Polarized Wave),若振幅一致則稱為圓偏波(Circularly Polarized Wave),如圖 2-22 (a)所示。. 32.
(53) 第二章 文獻回顧. C. 振幅. C=A+B A. B 時間. (c) 相增或相減 C. 振幅. C=A+B. A, B. 時間. (b) 同相. C=A+B. 振幅 A. B C. 時間. (a) 逆相. 圖 2-21 電波干涉 (資料來源:本研究整理). 33.
(54) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. (b)線性偏波. (a)橢圓偏波(圓偏波). 圖 2-22 極化 (資料來源:本研究整理). 第五節 地理資訊系統 (一) 地理資訊系統概述 地理資訊系統(Geographical Information Systems, GIS)為整合點、線、面空 間資料(Spatial Data)與描述性資料(Descriptive Data),提供使用者記錄檔案、分 析及搜尋地理資訊的電腦系統。GIS 起源於 1960 年代政府與研究機構使用電腦 顯示地理資訊,1970 年代 GIS 蓬勃發展,之後 GIS 開始與商業應用結合,GIS 應用範圍非常的廣泛,包含土地、道路、河川、建築物等管理38。. 38. 林傑斌、劉明德,地理資訊系統 GIS 理論與實務,文魁資訊股份有限公司,2002。 34.
(55) 第二章 文獻回顧. GIS 與其他資訊系統的主要區別,在於其儲存資料和處理的資訊是經過地 理編碼,地理位置及與該位置有關的屬性資訊,都成為資訊索引的重要部分。 在 GIS 中,世界被表達成一系列的地理要素和現象,這些地理特徵由空間位置 參考資訊和非位置資訊兩個部分組成。 GIS 功能如圖 2-23 所示,說明如下: 觀察外觀與地圖. 取得檔案. 檔案初始. 處理檔案. 資料庫. 建檔與索引. 結構化資料. 成果展示. 輸出繪圖. 查詢與分析. 互動式展示. 圖 2-23 GIS 功能圖 (資料來源:本研究整理) 1.資料蒐集、監測: 主要用於擷取資料,確保 GIS 資料庫中的資料在空間上的完整性、數值邏 輯一致性及正確性。目前 GIS 資料蒐集的方式和技術有許多種,有些僅用於 GIS,但是大部分都會配合定位技術 38。 2.資料處理: 資料處理主要包括資料格式化與轉換。資料的格式化指不同資料結構的變 35.
(56) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 換,資料轉換包括資料格式化的轉換、資料比例和座標變化。 3.資料儲存組織: GIS 資料庫涉及到空間資料和屬性資料的組織,柵格模型、向量模型或柵 格/向量混和模型是常用的空間資料組織法。 4.空間查詢與分析: 空間查詢是 GIS 最基本的功能,而空間分析是 GIS 的關鍵性功能,模型分 析是在 GIS 支援下,解決現實世界中與空間相關的問題 38。 5.圖形與互動式顯示: GIS 提供了使用者表現地理資料的工具,諸如報告、表格、地圖、等圖形, 一個好的 GIS 軟體應提供一個強大互動式的製圖環境,以供使用者能設計出精 密的地圖。 (二) 地理資訊系統優點 GIS 具有下列三大特徵: 1.具有採集、管理、分析和輸出多種地理資訊的能力,具有空間性和動態 性。 2.由電腦系統支援進行空間地理資料管理,並由電腦程式模擬常態的 地理分析方法,使空間資料產生有用的資訊,來完成的任務。 3. GIS 能快速、精確、整合到複雜的地理系統中,進行空間地位和程序動 態分析。. 36.
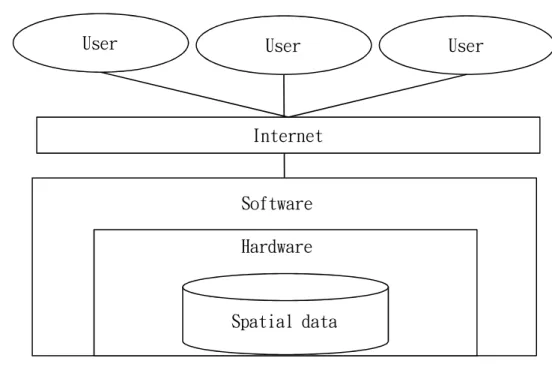
(57) 第二章 文獻回顧. GIS 之優點整理如下39: 1.GIS 可提供所有使用者一致、安全且有組織的地圖資訊。 2. GIS 可整合各種比例與屬性的地圖於同一個系統。 3. GIS 提供系統介面編修地圖,可大幅減少地圖編輯所需之時間。 4.透過 GIS 系統可簡化資料分析與展示所需要之時間。 5.透過 GIS 整合發展環境,可提升地理資訊作業的效率,例如:處理、分 析、傳遞地理資訊。 (三) GIS 架構 GIS 的架構與一般的資訊系統類似,一個完整的 GIS 主要由四個部分構 成:電腦硬體系統、電腦軟體系統、地理資料庫和系統管理操作人員,其關鍵 部分是電腦硬體和軟體,空間資料提供了 GIS 的地理內容,而使用者則決定系 統的工作方式和資訊顯示方式,GIS 架構如圖 2-24 所示 38。. User. Software Hardware. Spatial data. 圖 2-24 GIS 架構. 39. George B. Korte. “ The GIS book.”Onword Press, (1997 ), p.67-74. 37.
(58) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. (資料來源:本研究整理) 1.電腦硬體系統 電腦硬體包含了,電子、機械元件,為 GIS 的實體運作的機器,構成電腦 硬體系統的基本組件有輸入/輸入設備、CPU、記憶體等,電腦系統提供必要的 資訊,讓其硬體來完成工作。 2.電腦軟體系統 電腦軟體系統為使用者提供了方便的程式系統,通常包括作業系統、組合 程式、編譯程式、判斷程式、資料庫程式以及各種維護手冊等。通用 GIS 軟體, 包括了資料庫管理系統、繪圖軟體和影像處理軟體等,主要功能用於對空間資 料輸入、儲存、備份、轉檔、輸出等。在應用程式方面,開發人員依據地理資 訊分析模型撰寫程式完成特定任務。 3.系統開發、使用管理人員 人在每個系統開發都是一個重要的構成因素,以 GIS 而言,不單單只是繪 製一張地圖,而是一個動態的地理模型,只有系統電腦軟硬體和資料還不形成 一個完整的 GIS,需要人去進行組織、分析、管理、更新、系統擴充和應用程 式開發,並且採用空間和地理分析模型來取得多種資訊,建構出有強而有力的 系統。 4.空間資訊 系指系統開發者透過外在方式或者其他系統使圖像、文字等資料輸入到 GIS,GIS 空間資料主要包含了:物件座標的位置、實體之間的空間關係與實體 幾何位置相關屬性。 (四) 網路地理資訊系統(Web GIS). 38.
(59) 第二章 文獻回顧. Web 和 GIS 技術的整合即為 Web GIS(網路地理資訊系統),Web GIS 是利 用 Web 技術來達到多人使用 GIS 的目的,由於透過網路,Web GIS 具有較強的 互動功能,並且可以在瀏覽器上觀看顯示多媒體資料,同時使用者也可以透過 互動式操作,滿足使用者在空間資料查詢的需求 38。 圖 2-25 為 Web GIS 架構圖,傳統 GIS 大多都是獨立單機系統,使用者只 能透過自身 GIS 軟體才能觀看資料,對一般使用者來說相當不方便,而 Web GIS 可透過伺服器,經由網際網路讓多位使用者同時連接伺服端,而不受限於單一 台電腦,此外,Web GIS 可透過分散式資料管理,大幅提升資料安全性。. User. User. User. Internet. Software Hardware. Spatial data. 圖 2-25 Web GIS 架構圖 (資料來源:本研究整理). Web GIS 應用可分為以下幾個層面: 1.空間資訊的發佈: 由於 Web GIS 是以圖形、影像方式顯示資料,可用 TCP/IP 方式或者透過 39.
(60) 無線射頻辨識(RFID)於設施與設備維護管理之應用研究(III):三維空間定位模組強化. 網頁輔助管理,將資料上傳到網路平台,讓使用者更快速找到需要的資料。 2.空間查詢索引: 利用網頁提供互動力的功能,可進行地圖服務、地理處理服務、地理資料 服務及資料庫的查詢。 3.空間模組服務: 伺服器在接收使用者透過瀏覽器所輸入的參數後,將結果回應給使用者, Web GIS 不僅可以發佈成網頁元件,經由程式設計的開發,使用者可以透過瀏 覽器和系統作互動。. 第六節 虛擬實境 虛擬實境(Virtual Reality, VR)為電腦利用電腦繪圖或影像合成技術所模 擬建構的虛擬世界,在此虛擬世界中之物件可為人們所熟悉的周遭事物,或是 無法肉眼所見,或者是虛幻想像的空間40,而三維空間為建立虛擬實境最常用 的方法,在虛擬實境中,電腦系統利用人類感官之視覺、聽覺及觸覺的方式使 其於虛擬世界裡有所感受。 電腦圖學之父 Ivan E. Sutherland 於 1965 年提出「Ultimate Display」的想法, 可說是最原始的虛擬實境概念。一般而言,虛擬實境具有 3I 的特性,也就是 Immersion、Interaction 以及 Imagination,強調虛擬實境應該讓使用者有融入感 及臨場感,除此之外,虛擬實境也需要具備感覺回饋作用,讓使用者與此環境 能夠互動,最後,可因想像力的發揮而使得虛擬實境具備更多可能性41。. 40. Sherman, W.R. and Craig, A.B, “ Understanding Virtual Reality: Interface, Application, and Design.” Morgan Kaufmann, 2003. 41 G.Bu r de a , P .Coi f f e c t ,“ Vi r t ua lRe a l i t yTe c h n ol ogy ” ,J oh nWi l e y&Sons, New York N.Y., 1994. 40.
數據


+7

相關文件
在上 一節中給出了有單位元的交換環 R 上的模的定義以及它的一些性質。 當環 R 為 體時, 模就是向量空間, 至於向量空間中的部分基本概念與定理, 有些可以移植到模上來。 例如 子
4、設施工程類:污水處理廠、礫 間處理設施、焚化廠、環境工 程設備設施組裝系統、電業設
為了更進一步的提升與改善本校資訊管理系 的服務品質,我們以統計量化的方式,建立
z 香港政府對 RFID 的發展亦大力支持,創新科技署 06 年資助 1400 萬元 予香港貨品編碼協會推出「蹤橫網」,這系統利用 RFID
微算機原理與應用 第6
無線射頻識別 (Radio Frequency Identification, RFID) 系統近年來越來越普及,應用範圍如供
無線射頻識別 (Radio Frequency Identification, RFID) 系統近年來越來越普及,應用範圍如供
無線射頻識別 (Radio Frequency Identification, RFID) 系統近年來越來越普及,應用範圍如供
