應用於衛星影像之自動化土地利用分析系統
林昱岐 中原大學資訊系 g9677029@cycu.edu.tw 張元翔 中原大學資訊系 changyh@ice.cycu.edu.tw 顧承宇 國立海洋大學河海工程系 chkst26@mail.ntou.edu.tw摘要摘要-摘要摘要---由於由於由於由於目前目前衛星影像的目前目前衛星影像的衛星影像的取得容易衛星影像的取得容易取得容易取得容易,,,,其應用已成其應用已成其應用已成其應用已成 為相當有趣及重要 為相當有趣及重要為相當有趣及重要 為相當有趣及重要的研究議題的研究議題的研究議題的研究議題。。。本論文的目的在發展一套。本論文的目的在發展一套本論文的目的在發展一套本論文的目的在發展一套 應用於衛星影像之 應用於衛星影像之應用於衛星影像之 應用於衛星影像之自動化土地利用分析系統自動化土地利用分析系統自動化土地利用分析系統自動化土地利用分析系統,,,,系統主要分系統主要分系統主要分系統主要分 為前置處理 為前置處理為前置處理 為前置處理、、、、相似區域標籤化相似區域標籤化相似區域標籤化、相似區域標籤化、、土地利用分析三大部份、土地利用分析三大部份土地利用分析三大部份。土地利用分析三大部份。。。 系統主要核心技術是利用 系統主要核心技術是利用系統主要核心技術是利用 系統主要核心技術是利用(α, ω)-連通連通連通元件標籤化連通元件標籤化元件標籤化元件標籤化,,,,將衛星將衛星將衛星將衛星 影像中的土地分類成 影像中的土地分類成影像中的土地分類成 影像中的土地分類成「「「已開發區域「已開發區域已開發區域已開發區域」」」及」及「及及「「「未開發區域未開發區域未開發區域未開發區域」。」。」。」。 研究結果採用地質分析師手動分類及系統自動分類結果 研究結果採用地質分析師手動分類及系統自動分類結果研究結果採用地質分析師手動分類及系統自動分類結果 研究結果採用地質分析師手動分類及系統自動分類結果 進行評估 進行評估進行評估 進行評估。。。。本系統經研究驗證可達到約本系統經研究驗證可達到約本系統經研究驗證可達到約90%的正確率本系統經研究驗證可達到約 的正確率的正確率,的正確率,,,表表表表 示系統分類結果與地質分析師手動分類結果相當接近 示系統分類結果與地質分析師手動分類結果相當接近示系統分類結果與地質分析師手動分類結果相當接近 示系統分類結果與地質分析師手動分類結果相當接近。。。。除除除除 此之外 此之外此之外 此之外,,,,本系統只需要約本系統只需要約本系統只需要約10秒即可處理一張影像本系統只需要約 秒即可處理一張影像秒即可處理一張影像,秒即可處理一張影像,,,相對手相對手相對手相對手 動分類常需要 動分類常需要動分類常需要 動分類常需要15~~~30分鐘~ 分鐘分鐘分鐘,,,因此本系統可,因此本系統可因此本系統可因此本系統可作為電腦輔助系作為電腦輔助系作為電腦輔助系作為電腦輔助系 統在土地利用分析時 統在土地利用分析時統在土地利用分析時 統在土地利用分析時,,,,簡化人工繁雜手續簡化人工繁雜手續簡化人工繁雜手續簡化人工繁雜手續。。。。 關鍵詞 關鍵詞關鍵詞 關鍵詞----影像處理影像處理影像處理影像處理、、、土地利用分析、土地利用分析、土地利用分析土地利用分析、、遙測、遙測遙測遙測、、、、衛星影衛星影衛星影衛星影 像 像像 像。。。 。
Abstract ---- Because satellite images are easy to
access at present, their use for various applications has become an interesting and important research issue. The objective of this paper is to develop an automatic land use analysis system using satellite images. The methods include pre-processing, similar area labeling, and land use analysis. The core technique is the (α, ω)-connected component labeling that is used to classify the land in images into “developed area” and “undeveloped area”, respectively. Results are evaluated using manual classification by a geologist and the automatic classification by the system. Our system is shown to achieve an accuracy of ~90%, which clearly demonstrates that our system could achieve comparable results by geo-technologists. In addition, our system can process the satellite image in ~10 seconds in comparison to 15~30
minutes required by geologists, thus may ultimately be used as a computer-aided system to simplify the labor-intensive tasks by human for the land use analysis. Keywords --- image processing, land use analysis, -
remote sensing, satellite images.
一
一
一
一、
、
、
、緒論
緒論
緒論
緒論
(一) 研究背景 近年來衛星影像的應用已經逐漸廣泛,從 早期的氣象觀測到現在非常普及的汽車導航系 統 , 配 合 全 球 定 位 系 統 (Global Positioning System,GPS)之開放供民間使用,在生活應用 上產生了一些革命性的變化。例如,行動中的 車船能確切的透過衛星影像或地圖,配合 GPS 定位,定出到達目的地路徑及時間;救護車更 能緊急有效執行救護任務;汽車駕駛者能透過 電子地圖而知道目前所在位置及該往何處以達 目的地。 除了這些常見的應用之外,我們 也可以使用衛星影像來觀測地形或海岸線變 動,甚至可以直接從衛星影像上判斷該地區是 否過度開發,或是仍有可以開發的空間。所以, 透過影像處理技術來分析衛星影像,我們就可 以從中取得一些可用資訊作為分析評估的依 據。 (二) 研究動機與目的 土地的開發利用已經成為相當受重視的議 題,尤其在山坡地或保育區,希望能迅速又方便的得知綠地區域是否過少。由於衛星影像的 取得容易,我們可以利用這些資源透過影像處 理技術,組合成一個實用的系統。本篇論文基 於這個研究動機發展出一套自動化土地利用分 析系統。 (三) 相關研究 早在1970年代末期,Nagao et al.[1]基於α連 通元件(α-Connected Component)提出基本的區 域成長及標籤方法,開啟α連通元件應用於影像 分類的研究。Hambrusch et al.[2][3]根據α連通元 件進而設置一門檻值(Threshold)來限制連通元 件中像素值的差異量,藉此限制產生的鏈結效 應(Chaining Effect)。近年,Soille[4]應用上面的 幾種技術,將階層影像轉灰階後做連通元件標 籤化,之後再使用同樣標籤中色彩的中間值替 換整個標籤區域的色彩,達到影像分類與簡化 的效果。 此外,還 有各 種不同 的影像分 類研究 。 Hofmann[5] 使 用 多 重 解 析 分 類 法 進 行 影 像 分 類,除了使用光譜以及形狀因子來調整影像分 類參數外,亦加入數位表面模型(Digital Surface Model,DSM)資料來分類及偵測都市區域的道 路 和 建 物 。 Ye et al. [6] 將 密 度 式 分 類 法 (Density-based Segmentation),應用在影像中, 依據影像的光譜特性進行分類,在分類時同時 考慮到影像的光譜相似性以及空間連續性。 Pathak and Dikshit[7]利用區塊的光譜值或是紋 理 值 進 行 高 斯 最 大 相 似 分 類 法 (Gaussian Maximum Likelihood Classification)或類神經網 路分類法(Neural Network Classification)將原始 影像經影像分類後產生區域影像,並訓練一個 類神經網路,使系統具有區域分類的能力,以 達到影像分類的效果。Grady[8]則建構於圖論 (Graph Theory) 之 上 , 結 合 狄 利 克 雷 問 題 (Dirichlet Problem)解法和歸屬機率值對影像像 素標籤化以完成影像分類,可允許使用者同時 擷取多個元件,且計算速度快,僅需設定一個 固定參數值即可進行分類動作。Mignotte[9]基於 直方圖基礎,使用K-means分群法,把一張影像 根據六種色彩模型的不同特性來做分群,可達 到分類和簡化影像的效果。
二
二
二
二、
、
、研究方法
、
研究方法
研究方法
研究方法
本系統的設計是著眼於全自動化處理,僅 需少數人工設定。圖 1 為本系統方塊圖,輸入 為一張原始衛星影像,系統主要分成三大步 驟:(1)前置處理(Pre-Processing)包含色彩簡化 (Color Simplification) 及 去 除 雜 訊 (Noise Reduction),可以避免在接下來標籤的步驟中標 籤錯誤或是產生過多的標籤;(2)相似區域標籤 化(Similar Area Labeling),將色彩空間分類且色 彩資訊皆相近的像素視為同一連通元件,給予 相同標籤,再由這些標籤分類為「已開發區域」 (Developed Area)或「未開發區域」(Undeveloped Area);(3)土地利用分析(Land Use Analysis)則是 將已分類區域進行土地利用分析並提供量化數 據。 圖 2 為衛星影像範例,其比例尺為 1 公尺: 1 像素。本系統在設計時主要是採用比例尺為 1 公尺:1 像素的衛星影像。另外,衛星影像之取 得需符合下列兩項條件: (a)欲分析的衛星影像必須是由正上方拍攝,不 可有斜角。 (b)影像中應避免有雲霧或陰影干擾,否則可能 會影響分析結果。圖 1 自動化土地利用分析系統方塊圖。系統主 要分為前置處理(Pre-Processing)、相似區域標籤 化(Similar Area Labeling)、及土地利用分析(Land Use Analysis)三大部份。 (ㄧ) 前置處理(Pre-Processing) 由於衛星影像的色彩資訊相當豐富,以及 衛星攝影時的環境條件不一,所以需要先經過 前置處理,以減少分析時的錯誤及複雜度。其 中,系統包含色彩簡化(Color Simplification)及去 除雜訊(Noise Reduction)兩大部份。 現今數位彩色影像大多數是利用 RGB 色彩 模型描述影像中像素的色彩像素值,而 RGB 色 彩模型雖然可以充分的將一張影像呈現出來但 對土地利用分析而言則過於細微。 圖 2 系統所使用的衛星影像範例。其比例尺為 1 公尺:1 像素。 為了克服這樣的問題,系統設計希望能簡 化相似的區域中的值,以降低系統處理的複雜 度。因此,先將衛星影像做色彩簡化,不但可 以降低色彩的複雜度,也可以使像素間的差異 值變得明顯。本篇論文以 16 為一個間距將色彩 簡化,RGB 三原色各被簡化成 16 階,可由原本 一千六百多萬色簡化為 4096 色,不但保有原本 該有的明顯色彩資訊,又不會被太細微的色差 干擾分析。 由於衛星影像攝影時的環境條件不一,若 衛星影像的環境條件較差,則容易出現雜訊。 為了避免因雜訊而影響分析結果,我們使用中 值濾波(Median Filtering)來消除雜訊,中值濾波 器比起其他線性平滑濾波器模糊化的程度較 小,不會因此來改變原有的元件輪廓,且影像 的色彩已經經過簡化,再經由中間值濾波器時 影響影像色彩資訊的程度也較小。
(二) 相似區域標籤化(Similar Area Labeling)
衛星影像在前置處理後,便進入本系統的 核心,稱為相似區域標籤化。所謂的相似區域 標籤化,即為將空間分佈相近,且色彩資訊相
似的像素,視為同一元件又稱為連通元件,並 給予一相同標籤。根據標籤化的結果,可將衛 星影像中的土地進一步分類成性質不同的區 域,其結果會直接影響到土地利用分析的準確 度。在本論文中,「區域(Area)」是定義為具有 相同標籤之像素集合所構成之連通元件。 一 般 常 見 的 連 通 元 件 標 籤 化 (Connected Component Labeling,CCL),主要用於二值化後 的影像,用於將非背景的各個連通元件給予標 籤,而 α-連通元件(α-Connected Component)[1] 則可使用在灰階影像上。所謂的 α 連通元件標 籤化有別於 CCL 先判斷前景背景再做連通元件 標籤化的處理方法,相對是先給予一個連通條 件值 α,若兩相鄰像素的值相差小於連通條件值 α,才將此兩像素視為連通,最後將整張影像分 類為前景或背景等區域。圖 3 為 α-連通元件示 意圖,其中,(a)為 α = 1 時的連通情況;(b)為 α = 2 時的連通情況。由圖中可觀察到,α 值的設 定將會影響區域分類的結果。 1 2 3 1 1 1 2 8 1 2 2 4 10 3 3 3 7 5 5 5 7 3 7 5 5 1 2 3 1 1 1 2 8 1 2 2 4 10 3 3 3 7 5 5 5 7 3 7 5 5 (a) (b) 圖 3 α-連通元件示意圖。若兩相鄰的像素值相差 小於連通條件值 α,則此兩像素視為連通。其 中,(a)為 α = 1 時的連通情況;(b)為 α = 2 時的 連通情況。 不過,此兩種方法並不適用於本論文之系 統設計,主要是因為將衛星影像二值化或是灰 階化都會失去原本的色彩資訊,少了這些資訊 將會使我們的判斷分析變得不精確。因此,本 論文改進 α-連通元件標籤化方法,在判斷兩相 鄰像素是否連通時,把 RGB 三原色都做為檢驗 條件,若相鄰像素的三原色差皆在連通條件值 α 內,才將這兩像素視為連通,只要有一原色不 滿足條件則視為不連通。以公式表示如下: 假設兩像素 p
、
q 為四連通之相鄰像素,則 p、q 為 α-連通, if ( ) ( ) and ( ) ( ) and ( ) ( ) R R G G B B f p f q f p f q f p f q α α α − ≤ − ≤ − ≤ 其中, ( )fR • 、fG( )• 、 ( )fB • 分別為像素之 R、G、 B 值。 以上提出的 α-連通元件標籤化雖然可以有 效的在彩色影像中將色彩相近的像素標示成同 一元件,但標籤化的效果不理想。主要是因為 其 中 藏 著 一 個 很 嚴 重 的 問 題 - 鏈 結 效 應 (Chaining Effect)。簡單說明就是給予一個連通 元件中的連通條件值 α,若有三個連續像素 A、 B、C 的值分別為 α、0、-α,當以 B 為基準的時 候由於 A 和 C 皆在連通條件內,會把這兩個像 素都和 B 標為同一標籤,但這與我們所期望的 有所出入,我們期望同一標籤內像素值差異不 大於 α,不過上述例子中像素值差異會高達 2α。 若是像素的差異值為遞增或遞減,則很可能導 致整張影像具同樣標籤之連通元件中,最大差 異值高達 N 倍 α。因此,需要加入額外的條件, 稱為 ω 限制條件來解決這個問題。 ω 限制條件即是限制同一個連通元件中最 大像素值和最小像素值的差異,當要加入新像 素到一個現有的連通元件中時,先檢查加入後 最大值和最小值的差異是否會超過 ω,如果超 過,即使它滿足 α 連通條件,也不允許這個像 素加入此標籤。以圖 4 為例,其中(a)設定 α = 2、 無 ω 限制條件時,整張圖只分類成兩個區域, 同區域內最大最小值差異高達 3α;(b)加入 ω = 3 的限制條件後可解決鏈結效應,使同一區域內 最大最小差異值不超過 3,分類區域也由兩個變 為四個。(α, ω)-連通元件標籤化演算法如下:(α, ω)-連通元件標籤化連通元件標籤化連通元件標籤化連通元件標籤化((α, ω)-Connected Component Labeling)
Require: color image
f
R.f
G.f
B and threshold values α and ω.Require: label image lbl initialized to ∞.
Require: array lbl_min_r, lbl_min_g , lbl_min_b initialized to ∞.
Require: array lbl_max_r, lbl_max_g, lbl_max_b initialized to 0.
Require: orig initialized less than ∞.
next_lbl ← 1;
for all pixel p of the image f do
min_neighb ← orig;
for all pixel q neighbors of p do
if fR( )p − f qR( )≤α and fG( )p − fG( )q ≤α and fB( )p − f qB( )≤α and
(
fR( )p −lbl_ min_r)
≤ωand
(
fG( )p −lbl_ min_g)
≤ω and(
fB( )p −lbl_ min_b)
≤ω and(
lbl_ max_r−fR( )p)
≤ω and(
lbl_ max_g− fG( )p)
≤ω and(
lbl_ max_b− fB( )p)
≤ω thenmin_neighb = min (lbl(q) , min_neighb);
end if end for
if(min_neighb = orig) then
lbl(p) ← next_lbl; lbl_min_r(lbl(p)) ← fR( )p ; lbl_min_g(lbl(p)) ← fG( )p ; lbl_min_b(lbl(p)) ← fB( )p ; next_lbl ← next_lbl + 1; else lbl(p) ← min_neighb;
lbl_min_r(lbl(p)) ← min (lbl_min_r(lbl(p)) , fR( )p ); lbl_min_g(lbl(p)) ← min (lbl_min_g(lbl(p)) , fG( )p ); lbl_min_b(lbl(p)) ← min (lbl_min_b(lbl(p)) , fB( )p ); lbl_max_r(lbl(p)) ← max (lbl_max_r(lbl(p)) , fR( )p ); lbl_max_g(lbl(p)) ← max (lbl_max_g(lbl(p)) , fG( )p ); lbl_max_b(lbl(p)) ← max (lbl_max_b(lbl(p)) , fB( )p );
1 2 3 1 1 1 2 8 1 2 2 4 10 3 3 3 7 5 5 5 7 3 7 5 5 1 2 3 1 1 1 2 8 1 2 2 4 10 3 3 3 7 5 5 5 7 3 7 5 5 (a) (b) 圖 4 α-連通元件標籤化及及(α, ω)-連通元件標籤 化之比較圖。其中,(a)為 α = 2,無 ω 限制條件 之結果;(b)為 α = 2 加入 ω = 3 限制條件之結 果,加入限制條件後即可解決鏈結效應。 (三) 土地利用分析 經由相似區域標籤化處理後,輸入的衛星 影像會變成一張被標籤過的影像。因為分類出 之不同區域會給予不同標籤,而背景區域通常 會被標上同一標籤。系統假設單一前景區域的 面積不太可能會大於背景區域,因此被標籤出 來面積最大的區域設為背景區域(即為未開發區 域)。然後設置一個門檻值 T 為整張衛星影像像 素總和的 15%,若所有被標籤的區域面積皆小 於此門檻值,則表示這是一個開發程度極高且 幾乎無未開發區域,若被標籤的最大區域超過 門檻值,便將最大區域視為背景,其他區域則 就是該地區上面的建築物。土地利用(%)定義如 下: (%) = + 100% × 已開發區域像素總和 土地利用 已開發區域像素總和 未開發區域像素總和 本系統為了建立評估標準,本論文之衛星 影像經由地質分析師人工標示出已開發區域及 未開發區域,本系統在設計及評估時便是以人 工標示結果做為基準,藉以判斷系統分類的準 確度。圖 5 為土地利用分析的相關定義,將土 地分類為已開發區域和未開發區域。其中,已 開發區域包括建物區域及道路;未開發區域包 括森林區域、草地區域、及農地區域。 圖 5 土地利用分析相關定義。將一土地分類為 已開發區域和未開發區域。其中,已開發區域 包括建物區域及道路;未開發區域包括森林區 域、草地區域、及農地區域。 (四) 評估方法 本研究的評估方式,採用醫學影像中常用 的 評 估 方 法 , 以 正 確 率 (Accuracy) 、 敏 感 度 (Sensitivity) 、 有 效 性 (Specificity) 、 及 信 賴 度 (Kappa)四種參數,做為土地利用分析之系統評 估,各術語之定義如以下方程式所示,其中用 到的 True-Positive (TP)、False-Positive (FP)、False Negative (FN)、及 True Negative (TN)的說明如 下所示(見表 1): TP TN (Accuracy) TP TN FP FN + = + + + 正確率 TP (Sensitivity) TP FN = + 敏感度 TN (Specificity) TN FP = + 有 效性 A - C (K ap p a) 1 - C = 信 賴 度 其中, TP TN ( , Accuracy) TP TN FP FN A = + + + + 正確率
且
(
, Confidence)
TP
FN
TP
FP
TP TN
FP
FN
TP TN
FP
FN
FN TN
FP TN
TP TN
FP
FN
TP TN
FP
FN
C
=
+
×
+
+
+
+
+
+
+
+
+
×
×
+
+
+
+
+
+
同意的機率
表 1 評估參數示意圖 狀態 系統判斷 人工標示為 已開發區域 人工標示為 未開發區域 系統分類為 已開發區域 True Positive (TP) False Positive (FP) 系統分類為 未開發區域 False Negative (FN) True Negative (TN) 上述方程式及表 1 當中,TP 代表該像素人 工標示為已開發區域,且系統系統分類為已開 發區域個數;TN 代表該像素人工標示為未開發 區域,且系統分類為未開發區域個數;FP 代表 該像素人工標示為未開發區域,但系統分類成 已開發區域個數;FN 代表該像素人工標示為已 開發區域,但系統分類為未開發區域個數。 此外,正確率為經過地質分析師手動標示 與系統分類吻合的比率;敏感度為該像素人工 標示為已開發區域,經過系統分類結果為已開 發區域的比率(亦即在該像素人工標示為已開發 區域,系統判識正確比率);有效性為該像素人 工標示為未開發區域,經過系統分類為未開發 區域的比率(亦即在該像素人工標示為未開發區 域,系統判識正確比率);信賴度為針對系統診 斷結果之可信任度評估;Kappa 一致性係數是屬 於無母數統計的範疇,適用於類別尺度變數 [11]~[12],其中 Kappa 值介於 0.4 與 0.75 之間, 代表系統可信度良好,Kappa 值大於 0.75,則系 統可信度非常好。三
三
三
三、
、
、研究結果
、
研究結果
研究結果
研究結果
在本節中,研究結果的呈現以兩個方向為 主:一方面是呈現衛星影像經由標籤化後已開 發區域與未開發區域的結果;另一方面則是透 過地質分析師標示衛星影像中的不同區域和本 系統自動標示的不同區域做比較。 (一) 硬體環境 本研究環境所使用的衛星影像取自 Google Map (http://maps.google.com.tw)台灣地區影像, 採用的比例尺為 1 公尺:1 像素之衛星影像,系 統所處理的畫面大小最小為 650 × 420 ,最大為 1150 × 640 全彩(24 bits) 的 Windows Bitmap (BMP) 影 像 。 電 腦 執 行 硬 體 之 CPU 為 Intel Pentium 4 2.66GHz,RAM 為 1GB,實作軟體為 Microsoft Visual Studio 2008 , 程 式 語 言 採 用 C/C++ , 研 究 平 台 為 Microsoft Windows XP Professional SP3。 (二) 衛星影像標籤化結果 圖 5 與圖 6 分別展示兩組系統分類結果, 每組展示四張影像。(a)為輸入的原始衛星影像; (b)為使用 α-連通元件標籤化但並未加入 ω 限制 條件,標示結果不理想,主要因為受鏈結效應 的影響,導致很多細節與背景鏈結;(c)則為(α, ω)-連通標元件籤化,藉由 ω 限制條件來解決鏈 結效應,可看出分類效果提高許多;(d)圖則是 把分類的標籤以原始影像的像素取代,以便看 出分類結果是否良好。 此兩組影像都是使用 α = 32,ω = 64 的設 定,由於在前置處理中色彩簡化時是以 16 色為 一階層,α 設定為 32 等於可以包含上下兩階層, 而 ω 值的設定是希望讓綠地儘可能被標上同一 標籤,若 ω 過大會使色彩反差不夠大的建物被 視為未開發地,ω 過小會使為綠地但因為深淺的 不同而被視為不同類別,但其實淺綠或是深綠 對土地利用分析資訊沒有太大的意義。(a) (b) (c) (d) 圖 5 1 公尺:1 像素之衛星影像。(a)為原始衛星 影像;(b)為使用 α-連通元件標籤化但並未加入 ω 限制條件之結果;(c)為加入 ω 限制條件以解 決鏈結效應的結果;(d)為把分類出的標籤用原 始影像的像素代替,以便看出分類效果是否良 好。 (a) (b) (c) (d) 圖 6 1 公尺:1 像素之衛星影像。(a)為原始衛星 影像;(b)為使用 α-連通元件標籤化但並未加入 ω 限制條件之結果;(c)為加入 ω 限制條件以解 決鏈結效應的結果;(d)為把分類出的標籤用原 始影像的像素代替,以便看出分類效果是否良 好。
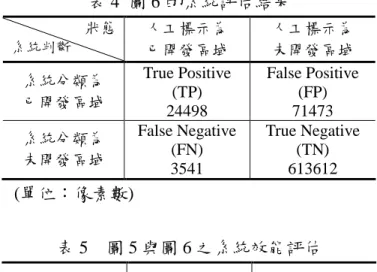
(三) ω 選取最佳化分析 除了影像的複雜度之外,另外一個影響土 地分析系統的重要因素便是 ω 的選取,ω 值的 設定是希望讓未開發區域盡可能被標上同一標 籤,若 ω 過大會使色彩反差不夠大的建物被分 類為未開發區域,ω 過小會使未開發區域因為深 淺的不同而被歸類為不同區域,但其實淺綠或 是深綠對分析資訊沒有太大的意義。為了提供 ω 選取之依據,透過以下實驗來證明所選取的 ω 值為最佳值:將圖 5~圖 6 套入不同的 ω 值,並 計算敏感度與有效性兩種數據的變化。如圖 7 所示。 0 10 20 30 40 50 60 70 80 90 100 32 48 64 96 112 148 180 212 ω P er ce nt ag e (% ) Sensitivity Specificity (a) 0 10 20 30 40 50 60 70 80 90 100 32 48 64 96 112 148 180 212 ω P er ce nt ag e (% ) Sensitivity Specificity (b) 圖 7 套入不同的 ω 值,並計算敏感度與有效性 兩種數據的變化。其中,(a)為圖 5 的數據變化 圖;(b)為圖 6 的數據變化圖。 由上圖可以得知:敏感度隨著 ω 值增加而 越來越小,意思是系統將已開發區域誤判成未 開發區域的比率會越來越高;而有效性則是隨 著 ω 值增加而越來越大,意思是系統將未開發 土地誤判斷為已開發土地的比率會越來越低。 本系統經研究結果驗證,權衡系統效能需 要同時獲得高敏感度及高有效性,因此選取 ω = 64 為最佳值,作為系統參數設定的依據,適用 於 1 公尺:1 像素的衛星影像。 (四) 土地利用分析及系統效能評估 我們放大原始衛星影像後,請地質分析師 以人工方式把輸入的影像標示出已開發區域, 以此影像作為標準,將相同的衛星影像透過土 地利用分析系統自動標示已開發區域,分別計 算各影像中的土地利用程度,結果如表 2。再分 別統計 TP、FP、FN 及 TN 值,計算這兩組影像 的正確率、敏感度、有效性、及信賴度四種參 數,作為評估標準。圖 8 與圖 9 是將 TP 以藍色 表示,FP 以綠色表示,FN 以紅色表示,TN 以 灰色表示,並將其輸出為影像。表 3 與表 4 為 這兩組影像各別的 TP、FP、FN 及 TN 值,表 5 為系統效能評估。 表 2 圖 5 與圖 6 的土地利用分析結果。 圖 5 圖 6 地質分析師 人工標示 4.6% 3.9% 系統 自動標示 5.5% 3.5% 表 3 圖 5 的系統評估結果 狀態 系統判斷 人工標示為 已開發區域 人工標示為 未開發區域 系統分類為 已開發區域 True Positive (TP) 12041 False Positive (FP) 24596 系統分類為 未開發區域 False Negative (FN) 660 True Negative (TN) 237003 (單位:像素數)
圖 8 將圖 5 透過手動標示與系統自動標示後的 比較,分別統計 TP、FP、FN 及 TN,將 TP 以 藍色表示,FP 以綠色表示,FN 以紅色表示, TN 以灰色表示。 圖 9 將圖 6 透過手動標示與系統自動標示後的 比較,分別統計 TP、FP、FN 及 TN,將 TP 以 藍色表示,FP 以綠色表示,FN 以紅色表示, TN 以灰色表示。 表 4 圖 6 的系統評估結果 狀態 系統判斷 人工標示為 已開發區域 人工標示為 未開發區域 系統分類為 已開發區域 True Positive (TP) 24498 False Positive (FP) 71473 系統分類為 未開發區域 False Negative (FN) 3541 True Negative (TN) 613612 (單位:像素數) 表 5 圖 5 與圖 6 之系統效能評估 圖 5 圖 6 正確率 0.91 0.89 敏感度 0.95 0.87 有效性 0.91 0.90 信賴度 0.91 0.89 由研究數據可看出本系統對於背景和建物 分佈較為簡單的影像中,標示出建物的能力非 常良好,與人工標示的結果非常接近,誤差值 皆在 2%以下,且信賴度高達 0.93,即使較為低 的信賴度也有 0.89,會有將近 2%誤差值,主要 是因為有一些很細小區域人眼通常會忽略它視 為背景,但系統判斷時依然會把這些細節抓出 來視為建物,以及有較大的色彩變化,對專業 人員來說那是未開發區域,不過對系統來說因 色彩明顯與周圍不同,因此被誤判為已開發區 域。
四
四
四
四、
、
、討論
、
討論
討論
討論
本研究提出一自動化土地利用分析系統, 利用建物在衛星影像中色彩相似且空間相近的 特性,基於(α, ω)-連通元件標籤化的演算法將影 像中建築物分類出來。典型的連通元件演算法 都是以二值或灰階影像為主,本系統將彩色影 像做相似區域標籤化,避免二值或灰階化的過 程中失去色彩資訊。此外,藉由本系統可克服 手動的繁雜手續。例如,經由地質分析師將一張 800×600 的影像標示出所有建物可能需要花 15~30 分鐘,由本系統標示只需要約 10 秒,且 標示出來的成果與手動標示相去不遠,即使有 部份錯誤再經由人工去除也可省下大量時間。 未來可以朝兩個方向進行改進:一是嘗試 加入其他判斷式來減少誤判,如太細小的標籤 區域可考慮視為雜訊忽略不計,藉此來減少判 斷錯誤的區域;其次是透過特徵擷取或是訓練 資料庫將已標籤的區域做更細部的分析,如此 便不單單是判定該衛星影像中的土地利用程度 有多少,可更細緻的分析各種類的分佈:如建 物區域 20%、道路 15%、森林區域 15%、草地 區域 30%、及其他區域 20%等,達到更全面性 的評估效果。
五
五
五
五、
、
、
、致謝
致謝
致謝
致謝
本計劃由國家科學委員會計畫編號 NSC 97-2221-E-033-051 贊助。六
六
六
六、
、
、
、參考文獻
參考文獻
參考文獻
參考文獻
[1] M. Nagao, T. Matsuyama, and Y. Ikeda, “Region Extraction and Shape Analysis in Aerial Photographs,” Computer Graphics and
Image Processing, vol. 10, no. 3, pp. 195-223,
July 1979.
[2] S. Hambrusch, X. He, and R. Miller, “Parallel Algorithms for Gray-Scale Image Component Labeling on a Mesh-Connected Computer,”
Proc. Fourth ACM Symp. Parallel Algorithms and Architectures, pp. 100-108, 1992.
[3] S. Hambrusch, X. He, and R. Miller, “Parallel Algorithms for Gray-Scale Digitized Picture Component Labeling on a Mesh-Connected Computer,” J. Parallel and Distributed
Computing, vol. 20, no. 1, pp. 56-68, 1994.
[4] P. Soille, 2008, “Constrained Connectivity for Hierarchical Image Partitioning and
Simplification”, IEEE Trans. on Pattern
Analysis and Machine Intelligence, vol. 30, no.
7, July 2008
[5] P.Hofmann, “Detecting Urban Features from IKONOS Fata Using an Object-Oriented Approach”, Remote Sensing and Photo grammetry Society(Editor): Proceedings of the
First Annual Conference of the Remote Sensing and Photogrammetry Society 12-12 September
2001, 28-33.
[6] Q.Ye, W.Gao, and W. Zeng, “Color Image Segmentation UsingDensity-Based Clustering,”
Proceedings of IEEE International Conference
on vol.3, no., pp. III-345-8 vol.3, 6-10 April 2003.
[7] V.Pathak, and O.Dikshit, “Segment Based Classification Using IRS-1C, LISS-III Data,”
Proceedings of the IEEE International Geoscience and Remote Sensing Symposium,
vol. 6, pp. 3513-3515, 2003.
[8] L.Grady “Random Walks for Image Segmentation,” IEEE Trans. on Pattern
Analysis and Machine Intelligence, vol. 28, pp.
1768-1783, Nov., 2006.
[9] M. Mignotte, 2008, “Segmentation by Fusion of Histogram-Based K-Means Clusters in Different Color Spaces”, IEEE Trans on Image
Processing, vol. 17, no. 5, May 2008
[10] R.M. Haralick and L.G. Shapiro, “Computer and Robot Vision, vol.1,” Addison Wesley, 1992.
[11] S. Siegel and N. Castellan, “Nonparametric Statistics for the Behavioral Sciences, 2nd Ed. ”, McGraw-Hill, New York, 1988.
[12] 李卓偉,統計學,致勝文化事業有限公 司,2000。