大華技術學院
機電工程研究所
碩士論文
汽車加裝行李架之氣動聲場分析
The aeroacoustic analysis on
luggage racks of vehicles
研 究 生:吳 岱 霖
指導教授:曾 慶 祺 博 士
汽車加裝行李架之氣動聲場分析
The aeroacoustic analysis on luggage racks of vehicles
研 究 生:吳岱霖 Student:Wu Tai-Lin
指導教授:曾慶祺 博士 Advisor:Dr. Tseng Ching-Chi
大華技術學院
機電工程研究所
碩士論文
A Thesis
Submitted to Institute of Mechatronic Engineering Ta Hwa Institute of Technology
in partial Fulfillment of the Requirements for the Degree of
Master of Science in
Mechatronic Engineering January 2008
Hsinchu, Taiwan, Republic of China.
汽車加裝行李架之氣動聲場分析
學生:吳岱霖 指導教授:曾慶祺 博士 大華技術學院 機電工程研究所摘要
本文利用數值方法探討汽車車頂裝設行李架在不同條件下的氣動聲場 現象,以提供業界在設計行李架之參考。文中利用電腦輔助設計軟體 PRO/ENGINEER 進行實體三度空間之模型建立,並以 FLUENT 軟體搭配κ
− 紊ε
流模式和 LES 紊流模式,進行三維流場模擬分析,繼而應用 FLUENT 內建之 聲場模組以進行聲場模擬分析。 模擬分析結果顯示,流場流動愈平順其所產生的氣動聲壓值愈低,因 此在設計行李架時,應儘量朝向流線構形及降低高度來設計,以達降低氣 動噪音之目的。The aeroacoustic analysis on luggage racks of vehicles
Student:Wu Dai-Lin Advisor:Dr. Tseng Ching-Chi
Graduate School of Mechatronic Engineering Ta Hwa Institute of Technology
Abstract
This study employed numerical method to study the aeroacoustic phenomena on luggage racks of vehicles in different conditions and aimed to provide a better aeroacoustic performance for the design of luggage racks. PRO/ENGINEER was used to build three-dimension solid models and CFD software FLUENT was then utilized to simulate the aeroacoustic fields.
The results show that the smoother flow is, the lower the sound pressure level is. Design of luggage racks should be emphasized on streamlining the shape and lowering the position of installation to reduce aeroacoustic noises.
目錄 摘要……….………….……….…I 英文摘要………..………II 目錄……….………III 表目錄……….………IV 圖目錄………..………V 第一章、緒論……….………..1 1-1 前言……….………1 1-2 噪音機制……….………2 1-3 氣動噪音與文獻回顧……….………7 1-4 研究目的………16 第二章、物理模式………..19 2-1 物理模型………19 2-2 數學模式………22 第三章、數值方法………33 3-1 邊界設定………...34 3-2 模型網格建構與格點測試………34 3-3 求解暫態紊流流場………35 3-4 接收點之聲場頻譜………36 第四章、結果與討論………..39 4-1 外型改變………39 4-2 流場速度變化………62 4-3 行李架與車頂距離變化………76 4-4 聲場模擬結果匯整………90 第五章、結論………...91 參考資料………..………..……….92
表目錄
表 1-1 基本氣動力聲源……….………..9 表 2-1 標準k−ε 紊流模式係數……….………26 表 4-1 模型B(V=30m/s,H=10cm)於各接收點的聲場頻譜分析結果……..60 表 4-2 模型 A(V=30m/s)於接收點 r1、r2、r3 的聲場頻譜分析結果……....60 表 4-3 模型 C(V=30m/s,H=10cm)於接收點 r1、r2、r3 的聲場頻譜 分析結果……….……….61 表 4-4 模型 B(V=16.67m/s,H=10cm)於接收點 r1、r2、r3 的聲場頻譜 分析結果……….……….75 表 4-5 模型 B(V=50m/s,H=10cm)於接收點 r1、r2、r3 的聲場頻譜 分析結果……….……….75 表 4-6 模型 B(V=30m/s,H=5cm)於接收點 r1、r2、r3 的聲場頻譜 分析結果………89 表 4-7 模型 B(V=30m/s,H=10cm)於接收點 r1、r2、r3 的聲場頻譜 分析結果………..89 表 4-8 所有模擬之最大表面聲壓……….90 表 4-9 所有模擬之最大聲壓位準值與最大之功率頻譜值及頻率………….90圖目錄
圖 1-1 噪音對身體的影響………2 圖 1-2 噪音型態………3 圖 1-3 汽車噪音與車行速度的關係………6 圖 1-4 分貝值變化與倍數關係圖………...7 圖 1-5 不同流動機制其相關的氣動噪聲頻譜………..14 圖 1-6 流體從垂立邊緣處分離捲起的大渦漩及再分裂的小渦漩……..15 圖 1-7 沿 A 柱形成的渦流………..15圖 1-8 Karman vortex street………16
圖 1-9 行李架上之行李箱………..17 圖 1-10 各式車頂行李架底座………17 圖 2-1 模型參考圖………..20 圖 2-2 模擬汽車上半部之主要尺寸………..20 圖 2-3 行李架放置位置………..21 圖 2-4 流場模型………..21 圖 2-5 模型 B 幾何外型及尺寸………..22 圖 2-6 模型 C 幾何外型………..22 圖 3-1 模擬流程………..33 圖 3-2 格點測試………..35 圖 3-3 網格建構………..35 圖 3-4 計算流程圖………..36 圖 3-5 動態穩定之監控………..37 圖 3-6 接收點位置圖………..38 圖 4-1 模型 A 之(a)流線圖、(b)速度向量分布圖(z=0.8m)、 (c)y 方向速度等位線(z=0.8m)………46 圖 4-2 模型 B 之(a)流線圖、(b)速度向量分布圖(z=0.8m)、 (c)y 方向速度等位線(z=0.8m)………47 圖 4-3 模型 C 之(a)流線圖、(b)速度向量分布圖(z=0.8m)、 (c)y 方向速度等位線( z=0.8m ) ………48 圖 4-4 模型 A 之(a)表面壓力分佈圖、(b)壓力等高圖(z=0.8m)………49 圖 4-5 模型 B 之(a)表面壓力分佈圖、(b)壓力等高圖(z=0.8m)………50 圖 4-6 模型 C 之(a)表面壓力分佈圖、(b)壓力等高圖(z=0.8m)………51 圖 4-7 模型 A 之(a)表面聲場分佈圖、(b)壓力等高線圖(z=0.8m)……52 圖 4-8 模型 B 之(a)表面聲場分佈圖、(b)壓力等高線圖(z=0.8m)……53 圖 4-9 模型 C 之(a)表面聲場分佈圖、(b)壓力等高線圖(z=0.8m)……54 圖 4-10 模型B(V=30m/s H=10cm)於不同接收點之聲壓位準圖 及功率頻譜圖………57
圖 4-11 模型 A(V=30m/s)於接收 點 r1、r2、r3 之聲壓位準圖 及功率頻譜圖……….58 圖 4-12 模型 C (V=30m/s H=cm)於接收點 r1、r2、r3 之聲壓位準圖 及功率頻譜圖……….59 圖 4-13 模型 B 在流速為 16.67m/s 時之(a)流線圖、(b)速度向量 分布圖(z=0.8m)、(c)y 方向速度等位線(z=0.8m)………67 圖 4-14 模型 B 在流速為 50m/s 時之(a)流線圖、(b)速度向量 分布圖(z=0.8m)、(c)y 方向速度等位線(z=0.8m)………68 圖 4-15 模型 B 在流速為 16.67m/s 時之(a)表面壓力分佈圖、 (b)壓力等高圖(z=0.8m)………..69 圖 4-16 模型 B 在流速為 50m/s 時之(a)表面壓力分佈圖、 (b)壓力等高圖(z=0.8m)………..70 圖 4-17 模型 B 在流速為 16.67m/s 時之(a)表面聲場分佈圖、 (b)壓力等高線(z=0.8m)………..71 圖 4-18 模型 B 在流速為 50m/s 時之(a)表面聲場分佈圖、 (b)壓力等高線(z=0.8m)………..72 圖 4-19 模型B(V=16.67m/s H=10cm)於接收點 r1、r2、r3 之 (左)聲壓位準圖及功率頻譜圖準圖、(右)功率頻譜密度圖….73 圖 4-20 模型B(V=50m/s H=10cm)於接收點 r1、r2、r3 之 (左)聲壓位準圖及功率頻譜圖準圖、(右)功率頻譜密度圖….74 圖 4-21 模型 B 在行李架高度為 5cm 時之(a)流線圖、(b)速度向量 分布圖(z=0.8m)、 (c)y 方向速度等位線(z=0.8m)…………..81 圖 4-22 模型 B 在行李架高度為 0cm 時之(a)流線圖、(b)速度向量 分布圖(z=0.8m)、(c)y 方向速度等位線(z=0.8m)……….82 圖 4-23 模型 B 在行李架高度為 5cm 時之(a)表面壓力分佈圖、 (b)壓力等高圖(z=0.8m)………..83 圖 4-24 模型 B 在行李架高度為 0cm 時之(a)表面壓力分佈圖、 (b)壓力等高圖(z=0.8m)………..84 圖 4-25 模型 B 在行李架高度為 5cm 時之(a)表面聲場分佈圖、 (b)壓力等高線(z=0.8m)………..85 圖 4-26 模型 B 在行李架高度為 0cm 時之(a)表面聲場分佈圖、 (b)壓力等高線(z=0.8m)………..86 圖 4-27 模型B(V=30m/s H=5cm)於接收點 r1、r2、r3 之 (左)聲壓位準圖及功率頻譜圖準圖、(右)功率頻譜密度圖…..87 圖 4-28 模型B(V=30m/s H=0cm)於接收點 r1、r2、r3 之 (左)聲壓位準圖及功率頻譜圖準圖、(右)功率頻譜密度圖…..88
第一章 緒論
1-1 前言 近年來,噪音對環境所造成的影響,逐漸被重視。噪音直接或間 接影響聽力、工作效率與安全、環境居住品質。在聽覺方面,長期暴 露於噪音之下可能造成「聽力損失」( hearing loss),暴露時間愈長、 音量愈大,所造成的聽力損失也愈大。由圖1-1 可看出在生理方面, 噪音會對耳朵與聽力造成暫時性或永久性的聽覺損失,甚至會透過神 經系統,引起身體其他器官或系統的失調與異常,而產生「非聽覺性 的影響」。它可能影響消化、呼吸、循環、神經系統的正常運作或造 成耳鳴。在心理方面,容易影響睡眠、妨礙交談、工作效率低落、莫 名其妙的生氣等心理作用,久而久之會導致生理功能失調與異常,如 頭痛、頭暈、精神無法集中、緊張、煩躁、焦慮等現象,而在工作上 造成分心、作業失誤、意外傷害等不良後果。也有人因長期的睡眠不 足而產生憂鬱症。兒童若長期處在高噪音的環境下,會不自覺的產生 忽略聲音訊號以調適對抗噪音的生理反應。這會對兒童學習及認知的 發展有相當不良的影響。 因此噪音的影響或許不是立即的,但卻是潛在的、長期而深遠 的。因為愈來愈多的醫學研究證實噪音對日常生活的影響,所以我國 環境保護署針對噪音對國人生活及工作的影響,制定了許多法規予以 規範,如航空噪音、工作器械噪音、工廠噪音、車輛噪音等,均有詳 盡的規定及量測標準,而為有效管制車輛噪音,規定所有製造或進口 新車型之廠商應持憑噪音檢驗機構測試合格之文件向環保署申請核 發新車型審驗合格證明,並於取得合格證明後,方能在台灣進行銷 售。另外歐盟國家對於噪音實施控管,要求所有成員國必需規範工作 環境噪音,例如輸入歐洲的玩具均需符合歐洲委員會授權統一標準組(CEN)所訂立的玩具噪音標準都有嚴格的明文規定。由上而知噪音控 制在未來工應用上所扮演的重要角色。 1-2 噪音機制 所謂噪音(noise), 一般指會令人心理或生理覺得厭煩不舒服的聲 音,凡是不規則不協調的音波在同一時間存在,使人感到厭煩者稱為 噪音。但此種解釋包含個人主觀因素,因此在噪音防治法中有較客觀 的定義:即噪音是指發生的聲音超過管制標準而言。從我國環保署所 訂立的噪音管制標準[1]中,噪音管制區分為風景保護區、住宅區、住 宅商業混合區、工業區等四大類,針對不同的區域有不同的管制標準。 圖1-1 噪音對身體的影響(摘自參考資料[1]) 噪音問題隨著人們講究生活、工作環境的品質下,噪音診斷與防
治愈趨重要。要做好有效的噪音防治之前,首先要做好噪音診斷工 作,就須從噪音型態與噪音源辨識著手。白明憲在[2]文中提到噪音型 態區分為:穩定噪音、變動噪音、間歇噪音、衝擊噪音等四類,並詳 加解釋各類噪音型態之定義,圖1-2 說明各類噪音型態之變動方式。 圖1-2 噪音型態(摘自參考資料[2]) 噪音之聲壓位準隨時間的變化狀況,可分為穩定的(stationary)和 非穩定的(non-stationary),其中非穩定噪音又分為變動噪音(fluctuating noise)、間歇噪音(intermittent noise)、衝擊噪音(impulsive noise)。各種 噪音型態的定義如下: (1)穩定噪音:其聲壓位準在一定值附近只作小幅的變動 (一般在 6dB 以下,人耳不易分辨其大小)。例如泵、 馬達、齒輪箱、輸送帶噪音等皆屬此類噪音。 (2)變動噪音:其聲壓位準隨時間有大幅度的變(在 6dB 以上)。例如研磨機、電動手工機、銲接、交通噪音 等皆屬此類噪音。 (3)間歇噪音:其聲壓位準的改變量在 6dB 以上,在變動 過程中其聲壓位準回降到背景噪音不只一次,而且間 隔大於一秒。例如自動化生產線、切削加工噪音等皆 屬此類噪音
(4)衝擊噪音:其達到最大振幅所須時間小於 0.035 秒, 而由開始經最大值到往下降低 30dB 所需時間小於 0.5 秒,又兩次衝擊時間間隔不得小於一秒。例如氣 動工具、鉚釘機、沖壓床等皆屬此類噪音。 由於噪音源的種類很多,要如何找到它們更是因難的工作。正確 辨識噪音源與其機制,並同時評估其相對重要性,對於有效改進噪音 有很大的助益。噪音源的產生可概略分為結構噪音與氣動噪音,結構 噪音是由結構表面振動推擠鄰近介質所產生的聲波幅射,例如轉動機 械、衝擊、共振、摩擦,其產生機制較易預測,故在噪音控制上已獲 得相當程度的改善。而氣動噪音的產生機制來自於紊流流場的壓力變 動,較不可預測故難以改善,例如亂流、渦流、噴射流、共鳴、氣穴 蝕。而由空氣動力所產生的噪音,在生活中卻是常可遇見的。例如: 個人電腦的散熱風扇在高速之下造成氣動噪音提高的問題,可藉由改 進扇葉外型以降低氣動噪音,這會是該產業在必需解決的問題。而基 於道路安全駕駛的因素,汽車所產生噪音亦是有必要消除的,圖 1-3 列出汽車的噪音產生原因,從氣動噪音方面來論就包括進氣、排氣、 風扇、引擎、風切音等,真是錯綜複雜。 人耳所能聽到的聲音強度是與壓力擾動變化二次方之平均值有 關。通常所謂的聲壓,是指量測壓力擾動的均方根(square root of the mean square,rms)。人耳對聲音強度的感受屬非線性,亦即兩倍大的 音量其聲音強度並不是兩倍。用對數尺度來測量是比較符合人耳對聲 音的感知,分貝(decibel)是較常使用的單位,聲音通常是藉由聲壓位 準(sound pressure level, SPL)來表示。其表示式如下
SPL (in dB) =10log( )
ref
I
I (1)
ref
I 表示參考聲強( reference sound intensity)
亦可等於下式: ) )( ( log 20 10 dB P P SPL ref e = (2) e P表示聲壓( sound pressure) ref
P 表示參考聲壓( reference sound pressure),pref Pa
5 10 2× − = 在分貝尺度中,兩倍的聲強會增加 3dB(因為log2約等於0.3),所 以當分貝從74dB 增加到 77dB,亦即說明聲強變成兩倍。而聲壓值增 加6dB 時聲壓正好增加兩倍,可由圖 1-4 看出其倍數關係。透過分貝 的倍數關係,可了解分貝值的差異會造成物理量多大的變化,才不至 於把噪音改善工程誤認只是幾個分貝的改善,視之為簡單的工作,例 如要將噪音值降低1dB,必須將聲壓值降低 11%,由此可知為相當困 難的工作。 噪音與音樂的純音性質不同,它是由許多頻率的聲音所組成。所 以除了量測聲強外,了解強度隨頻率變化的情形也是很重要的,它可 提供噪聲頻譜。通用的噪聲頻譜是將頻率範圍劃分成八度音,每個八 度音再分成三個部分。而以分貝為單位的聲壓位準是一次量測1/3 個 八度音的頻率範圍再以對比的方式畫出區域中間的頻率。蔡國隆在[3] 中說明八度音的定義為:當頻率上限為頻率下限的兩倍時,稱為一個 八度音。八度音屬於對數尺標,每一個八度音所包含的頻率範圍並不 相同,愈高頻率的八度音頻寬愈寬。因其與人耳對於聲音的頻率反應 較為類似,因此分析聲音常使用八度音作為頻率分析的頻寬。 人耳所能聽到的聲音,其頻率範圍大約在 20Hz 到 20000Hz 之 間,在這快速變動的聲音頻率中,一般常用的噪音位準尺度是經過加 權的。頻率之所以要加權的原因是因為測量儀器所測得的聲壓值會反 映出實際的聲壓物理量,但人耳所聽到的聲音會因不同的頻率而放大
或抑制。而為了要彌補二者間的差異,在儀器中使用頻率加權將量測 到的訊號轉換為人所能感受的聲音大小。評估噪音對人的影響通常是 使用A 加權,它是利用等響度曲線中 40PHONE 的曲線簡化之後的反 應曲線。若不使用頻率加權,則為線性加權(L 加權),其單位表示式 為dB,而經過 A 加權後的聲壓值,其單位表示方式改為 dB(A)。 圖1-3 汽車噪音與車行速度的關係(摘自參考資料[1])
圖 1-4 分貝值變化與倍數關係圖(摘自參考資料[3]) 1-3 氣動噪音與文獻回顧 要改善氣動噪音,要先了解氣動聲學。陳金文在[4]中對氣動聲學 所下是定義是:凡是以空氣為介質經由流體流動而產生的聲音均是氣 動聲學所探討的領域,基本上分成兩類,一類為自由流束之氣動聲, 另一類為自由流束與物體邊界之交互作用之氣動聲。氣動聲是由壓力 的快速變動以波動方式在聲速下傳遞所造成。聲波是一種易於感受卻 不易觀察的波動現象,它與人類生活息息相關,因為它是人類相互溝 通、傳遞信息的主要方式。聲波的產生起因於具應變特性的連續性介 質受擾動之後,因該介質具有回復原狀態的能力,繼而漸次牽動鄰近 粒子而導致能量傳遞的動力現象;簡言之,聲波是由於介質的彈性性 質(elasticity)而產生能量傳遞的波動現象。故聲波可藉介質的物理變 數 受 擾 動 的 狀 況 來 描 述 。 描 述 聲 波 的 物 理 變 數 包 括 壓 力 擾 動 量
p′(pressure perturbation),亦即是聲壓(sound pressure)、密度擾動量
ρ′、粒子的運動量(u′,v′,w′),而人耳對聲波會產生感覺就是因為
微擾壓力p′所造成的。
方程式經線性化過程,再假設小擾動及無平均流場(mean flow)後合併 成波動方程式。稱為線性波動方程式,如式(3)所示: p t p c ∂ =∇ ′ ′ ∂ 2 2 2 2 1 (3) 由上式可看出線性波動方程式是一個齊次方程式,因為在控制容 積中沒有聲源存在,它是屬於雙曲線偏微分方程式(hyperbolic partial differential equation),對時間和空間都各含有二階導數。而以類似的 方法推導可證明ρ′與V′=(u′,v′,w′)同樣符合式(3),亦即在聲波傳播的 過程中,聲壓、密度、速度在時間與空間上皆須符合波動方程式。 上述的齊次波動方程式是描述介質受到微小擾動後,在等熵過程 中,介質波動必須符合的質量與動量守恒定律。而實際上,在無窮介 質中若須符合輻射邊界條件,則任何導致聲波方程式成為非齊次方程 式的因素都將構成聲源的條件。非齊次的波動方程式如式(4): ) , ( 1 2 2 2 2 p q r t t p c ∂ −∇ ′= ′ ∂ (4) ) , ( tr q 是驅動聲源的聲源項(forcing term),所以在整個空間中可分
成聲場區(sound field region)和聲源區(source region),在聲場區中,
0 = q ,而在聲源區中q≠0。 若是介質中存在著限定介質的邊界,則聲波亦可由邊界表面產 生。即聲波可由以邊界為聲源產生處再藉由介質輻射之後形成聲場, 它的能量分佈與聲源結構以及運動的方式有密切的關係。聲場分佈取 決於聲源的組成模式。而由聲源產生聲波的過程稱之為聲源過程 (acoustic source process)。白明憲在[5]中介紹三種聲源模式:即單極 (monopole)、偶極(dipole)和四極(quadropole)聲源模式。這三種聲源模 式都是因為邊界表面的運動擾動介質繼而輻射聲波的機制。其發生機
表 1-1 基本氣動力聲源(摘自參考資料[5]) 第一項 第二項 第三項 發生機制 流體內應力 流 體 加 之 於 固 體 表面之變動壓力 運動固體邊界造 成之體積位移 聲源 四極聲源 偶極聲源 單極聲源 速度相關性 ~ U8 I I ~ U6 I ~ U4 代表例 噴射流 風扇、邊界層 氣蝕、活塞 汽車所產生的氣動聲源屬於偶極聲源與四極聲源。George 在[6] 中指出當在汽車室內噪音 70-80dB(A)的範圍內長途開車時會造成疲 勞。故基於道路安全駕駛的因素,汽車的舒適性不再被認為是奢侈的 需求。由汽車內部及外部空氣流動對舒適性的影響,使得汽車的空氣 動力設計成為一件很重要的事。汽車設計除了在低油耗的主題下,現 今亦重視如何降低高速行駛下所造成的氣動噪音,以免影響駕乘時的 舒適性,而隨著汽車設計在性能品質與外型方面趨於完善的情況下, 內部的舒適性被視為一個很重要的行銷策略。R.H. Barnard 在[7]中將 汽車舒適性的問題分類為下列幾項:空氣的新鮮度、濕度、暖氣系統、 空氣動力噪音等。因此可知由內部及外部空氣流動所產生的噪音是影 響舒適性的一項重要因素。 對於汽車設計者而言,有下列兩個種型式的噪音是他們所關切的 (1)汽車內部的噪音—它會影響駕駛和乘客。 (2)行進間的噪音—它會影響路人 現今有許多國家對於汽車所產生的噪音有訂立法規標準以規
範,目的在降低汽車行駛中所產生的噪音,並且有規定測試的標準。 以歐盟規定的行駛噪音標準74dB(A)來看,現行有些車輛很難達到, 因單就輪胎噪音就接近這個程度了。許多型式的氣動噪音是隨速度的 六次方增加。然而在低速行駛時氣動噪音不是造成超越法規標準的主 要因素。但是隨著需求標準漸趨嚴格,再加上引擎靜音的改進下,氣 動噪音問題變得很重要。氣動噪音似乎已成為車室內部環境的主要問 題。 在汽車室內聽到的噪音有一部分是來自車室內部,例如通風系 統,另一部分是因外部空氣流動所產生的影響。通常由外部所導致的 噪音是最重要的,特別是在高速行駛時。有兩個方法來降低外部所產 生的噪音問題:一是移除聲源,另一是隔絕外部傳至內部的聲源。當 聲源是直接由車身傳進來的噪聲可藉由在車身壁板內加裝振動阻尼 (vibration-damping)材料,但聲音的傳輸路徑通常是經由細縫傳出,所 以要特別注意密閉的處理,因為光是將窗戶開一微小細縫,就會大大 增加傳進內部的噪音。氣動噪音的產生機制是與紊流和渦漩結構所造 成的壓力擾動有關。幸好,在設計降低阻力的目標下,也同時會造成 外部噪音源的降低。現在使用低阻力的外型,再配合高標準的密閉處 理,已能有效降低車室內的噪音。在 1970 年代,Bucheim 等人在[8] 中研究 15 種不同的汽車發現,當行車速度在 113km/h 時車室內噪音 值約在 62-78dB(A)的範圍,當時速為 180km/h 時車室內噪音會上升 到72-87dB(A)之間。Piatek 在[9]中圖解說明小車在 150km/h 時速下, 其車室內部接收到的各種聲源噪音值如下: ♦ 引擎:82.5dB(A) ♦ 輪胎:78bdB(A) ♦ 外部氣流流動:78.5dB(A)
上述聲源的總和聲壓值是85dB(A)。 邊界層(boundary layer)所產生的噪音是隨機變化的,而且其所涵 蓋的頻率範圍很廣,圖1-5 說明在不同流動機制下所產生的氣動噪聲 頻譜之分佈型態。在汽車的各類噪音中,我們很難區分噪音是由何處 傳入的,而由邊界層所產生的噪音在整個汽車噪音中不是主要部分, 由於它所產生的噪音屬於高頻區,要隔絕它是相對容易的,只要在車 身壁內加入吸音材料再加上良好的密閉處理。 邊緣噪音(edge noise)是因流體在物體的彎角處和外型的細小邊 緣處會分離流動而產生,其頻率是屬於相當窄的頻帶,如圖1-5 所示。 從邊緣散出的分離剪力層內含有高渦度,且傾向於捲起大漩渦。這些 大漩渦會在在半規則的區間內分離並形成小的次級漩渦,如圖1-6 所 示。通常它無法產生規則的單一音調,且當附近有凹穴時會有共鳴的 產生,這種發聲機制會產生哨音(flute)現象。隨著車速的增快,它的 中央頻帶之頻率會增加。而流體在邊緣分離所產生的噪音,可藉由將 汽車表面設計平滑與連續而獲得改善。 風切噪音(wind noise)的最大來源起因於強大的渦流,由圖 1-7 中 可知它通常會在汽車的 A 柱處形成,而前側窗則成為這些渦流形成 與傳遞的最佳管道。其噪音特性是相當小的頻寬。將 A 柱導圓角以 符合外型的連續會對降低噪音有幫助,但要注意的是,太大的導圓角 將造成視覺上之不協調。 不連續音(discrete noise)最讓人感覺不愉快,這類的聲音是由流體 流經寬而垂直形狀後形成的卡門渦流(Karman vortex street)所產生 的,汽車的行李架就是最好的例子。卡門渦流是由氣流流經竪立的物
體時,會產生交替的渦流流線,如圖1-8 所示。這種從物體兩邊散溢
氣動力。這種物理現象可由在高空中受風襲的電話線所產生的蜂鳴 (singing)聲中發現,而汽車行李架也會產生此種現象,它是一種很吵 雜的噪音源。 綜上而論,現今有很多工程師在汽車抑制氣動噪音上做了很多的 努力,例如:前擋風玻璃儘量低斜、車門把手與車門成為一體光滑的 線條、車頂上的導雨槽隱藏於車側門板成為一體成形的導雨槽以避免 車頂氣流被擾亂等。而由汽車照後鏡所引發的氣動噪音是較困難解決 的,Hold[10]等人與 Siegert[11]等人的曾用實驗量測法來分析照後鏡 在時速 200 公里行駛下的聲場分析,Callister 等人在[12]中曾以實驗 量測方法來分析照後鏡不同外型及擺放的位置所產生的聲場現象,來 降低噪音量。使用無響風洞來研究汽車的氣動噪音是相當成熟的技 術,但其造價昂貴且需花費許多時間與人事成本,故在應用上有其限 制。 1952 年時,Lighthill 在[13]中提出的理論對氣動聲學有著開創性 的貢獻,將聲源部分利用實驗或計算流體力學(CFD)方法在波動方程 式中計算其傳遞過程,即為Lighthill’s analogy,。接著 Ffowcs Williams J.E.與 Hawkings D.L [14]根據 Lighthill’s analogy 的方法,重新整理 Lighthill 方程式,由於其推導過程是根據 Navier-stokes equation 而且 未有任何簡化,故Ffowcs Williams-Hawkings equation(簡稱 FW-H 方 程式),比 Lighthill 方程式有更廣泛的的適用範圍。但是受限於電腦 運算速度的限制,直到1992 年,Williams E. Zorumski 在[15]中將氣 動 噪 音 與 CFD 的 結 合 做 出 合 理 的 預 測 , 其 中 包 括 了 定 義 CAA(Computational AeroAcoustic)適用範圍與方法、找出合適的統御 方程式和邊界條件。而隨著運算速度的增快,有更多的文獻是利用 Lighthill’s analogy 的方法,結合 CFD 對氣動噪音做出合理的預測與
改善。 以數值計算技術用於聲學領域稱為計算氣動聲學,它在近幾年變 得很有潛力。使用它的目的在於虛擬風洞的計算模擬。基本上,當問 題很複雜時,盲目的應用傳統演算法是無法獲得可接受的解。因為所 關注的現象根本上是不穩定的且涵蓋廣域的頻率和振幅。但是,若經 由適當的簡化與謹慎地解決特定的現象時,現行可用的方法是可有效 用於解重要的聲學問題。這些模擬可用於輔助實驗,且通常可給予比 風洞實驗更多的詳細資訊。從近場的不穩定使用聲學類比的方法來測 定遠域(far-field)聲場,其所費的資源較少而且大大降低了計算需求。 NASA 蘭氏研究中心針對計算氣動聲學提供一些通用的應用範例。該 中心研究以發展較進步的方法來處理實際問題中的複雜幾何,並強調 使用區塊結構化(block-structured)和非結構化(unstructured)格點。而運 用數值模擬來研究廣大範圍的計算氣動聲學是一個較佳的方法來了 解空氣動力所產生的噪音。由不穩定流動所產生的噪音其背後的物理 學是非常複雜的。波動容易在剪力層和渦漩結構中生成,要在均勻流 中計算這些特徵其困難度很高。若想嘗試在均勻流中捕捉其微小而不 穩定的波動是一個很大的挑戰。因為在分離區、不穩定區中,大、小 尺寸的紊流結構均會對聲音場有所貢獻。在 NASA 蘭氏研究中心做 了很多計算上的努力,其目的在於預測和降低飛機的噪音。
Bipin Lokhande[16]等人以 Fluent 為計算平台,根據 [10]與[11]
的實驗資料,來模擬照後鏡在時速200 公里行駛下的聲場分析,得到
與實驗值近似的結果。Kenji Ono [17]等人以實用為目的,利用
Lighthill’s analogy 的方法先計算出車子於高速行駛下,後照鏡所產生 的氣動噪音,再用其結果與風洞的實驗值做比較,其結果吻合。而在 重新設計後照鏡外型後,成功降低了氣動噪音。亦有文獻是探討在闡
述Lighthill 方程式下,不同解所適用的不同範圍。Jean Prieur 與 Gilles Rahier 在[18]中詳細解釋了 FW-H 方程式與 Kirchhoff 方程式的適用範 圍與相異之處,並指出:FW-H 方程式若在一控制表面的範圍內,適 用性將不會受到限制,而 Kirchhoff 方程式只適於相同介質中,線性 傳遞的聲波,並且只能計算控制表面與控制表面外的聲場分布。然而 在氣動聲學的模擬中,除了用 Lighthill’s analogy 的方法,亦可使用
Linear Euler Equation(LEE)來計算聲場,Y. Addad 等人在[19]中以 Star-CD 先計算暫態流場後,再以 LEE 對渦流(vortex)產生的機制與聲 源(acoustic source)的關係做比較,發現流場中渦流產生的位置與聲源 產生的位置幾乎相同。然而,Christophe Bogey[20]等人,明白指出在
低馬赫數的條件下,選擇 Lighthill 方程式來分析聲場是比較快速且準
確的。
圖 1-6 流體從垂直邊緣處分離所捲起的大渦漩及再分裂的小渦漩 (摘自參考資料[7])
圖1-8 Karman vortex street(摘自參考資料[7]) 1-4 研究目的 由上可知,正確辨識噪音源與其機制,並同時評估其相對重要 性,對於有效改進噪音有很大的助益。隨著生活水平的提升,週休二 日造成國人出外旅遊的盛行。而汽車行李架雖然可帶來生活的方便 性,而其所產生的氣動噪音也是值得注意的,但在目前學術研究中尚 未發現有學者針對此問題做進一步之評估與探討。 一般家庭在購車時為了乘坐的舒適性與便利性,休旅車會是優先 考慮的重點。休旅車幾乎都配備了放置行李架的位置,以方便使用者 做空間的有效利用。例如: 1、行李多但內部空間不夠放置時,可放在外加的車頂行 李箱裏,或栓在行李架上,如圖 1-9 之行李架上之行 李箱。 2、攜帶的東西太大塞不進車內,如車上露營帳、戲水之 小舟等均可放在車頂行李架上。 3、腳踏車可放在車後腳踏車架上,亦可在車頂放置腳踏 車固定架上。 行李架是有需要時才會用到,所以市售的休旅車一般會預留裝設 行李架的預備支架(或底座),它位在車頂平行兩側車窗的位置,根據 各家設計理念不同其外型有些差異,如圖1-10 所示。
圖1-9 行李架上之行李箱
圖1-10 各式車頂行李架底座
圖1-10 中的 C 與 D 裝有行李架,而 A、B 與 E 則只有行李架之 底座尚未裝上行李架。行李架所產生的氣動聲場現象,從參考以往的 文獻中,發現尚未有針對加裝行李架所引發之氣動聲問題的研究報 告。 由於氣動噪音對汽車駕乘之重要性,再加上從參考文獻之收集中 發現,汽車加裝行李架所引發的氣動噪音尚未有研究資料,因而進行 汽車加裝行李架之聲場模擬,期望從模擬結果中找出改善氣動噪音之 注意事項。研究方法是採用數值模擬分析之方法,使用Fluent 數值套 裝軟體來進行模擬分析汽車配備行李架在高速行駛下所產生的氣動 聲場。由探討流體流經汽車行李架所產生的聲場物理現象,以做為改 善氣動噪音的參考建議。文中先由Pro/E 3D 繪圖軟體完成實體建模, 再匯入 Gambit 前處理軟體建構流場域網格與設定邊界條件。而為求 流場之合理化,先以κ-ε 紊流模型初步對氣流場域做分析,藉由找出 合適的流場範圍、模型的位置。經測試完成後,再正式匯入 Fluent 計算平台做氣動聲場之分析。 本文之架構為:第一章從說明噪音對身心之影響來了解噪音防制 之重要性,而要有效防治噪音則必需了解噪音產生的機制及其類型, 再從氣動噪音之相關文獻中決定研究的主題。第二章敘述模擬之物理 模型及使用到的相關統御方程式。第三章說明模擬採用數值方法和所 應用的計算軟體及邊界條件之設定與計算流程。第四章針對模擬分析 之結果依序探討其所產生之物理現象。第五章將所得到之物理現象提 出結論及設計上之建議。
第二章 物理模式
2-1 物理模型 物理模型主要是以三維立體方式建立,其尺寸主要參考現行市面 上加裝行李架的休旅車,為簡化計算模型僅選取休旅車上半部:即 前、後擋風玻璃及兩側車窗根部以上之範圍,如圖2-1 框線內部所示, 同時也不考慮汽車的導圓角,主要尺寸分別為:上半車長 3m、上半 車寬1.6m、上半車高 0.6m,如圖 2-2 所示。行李架長 1.2m、寬 0.03m、 高0.12m (含邊柱高 0.1m,邊柱之橫切面為 0.03m 正方形),前行李架 距車頂前緣0.3m,而前、後行李架間之距離為 0.8m,如圖 2-3 所示。 流場分析之物理模型為長方體,入口處為等速分佈(Uniform flow)。 經測試分析後,發現流場模型分別為 12 倍上半車長、7 倍上半 車寬、7 倍上半車高時所計算之壓力係數最為穩定。於是將休旅車定 位於中央地面處,X 方向距車前 3 倍、車後 8 倍之車長距離,Y 方向 距休旅車車頂有6 倍車高距離,Z 方向距休旅車左、右各 3 倍車寬距 離。Perzon 等人在 [21]的研究發現,假如入口為等速分佈之流場, 則車頭前面必需有足夠之距離,以便在車頭處獲得較佳之壓力,因此 建議此距離至少為 10 倍車高。在本研究中,從入口到車頭間之距離 有1.2m,大於 20 倍車高,符合建議值。座標取法為:空氣流向休旅 車之方向為正X,垂直休旅車為正 Y,面向車頭右手方向為正 Z。整 個流場模型尺寸長(L) ×寬(W)×高(H)為 36m×11.2m×4.2m,如圖 2-4 所示。 本研究從三個方向探討加裝行李架的聲場現象,分述如下 一、依行李架形狀變化區分為: 模型 A:無加裝行李架,見圖2-2 模型 B:加裝扁方形行李架,見圖2-5模型 C:加裝半圓弧形行李架,行李架之位置與模型B 相同, 見圖 2-6。 二、不同速度下的聲場現象,以模型B 之外形為基礎,改變流場 進口速度,其流速分別是16.67m/s、30m/s、50m/s。 三、改變行李架下緣與車頂距離,以了解聲場的變化情形,以模 型 B 之外形為基礎,行李架底邊距離車頂的高度分別為 10cm、5cm、0cm。 圖 2-1 模型參考圖 圖2-2 模擬汽車上半部之主要尺寸
圖 2-3 行李架放置位置
圖2-5 模型 B 圖2-6 模型 C 2-2 數學模式 本文的研究目的在於了解汽車配備行李架在高速行駛下所產生 的氣動聲場之現象,而要計算氣動聲場必先得到紊流流場中的密度或 壓力變化,因此需先計算暫態紊流流場。再將所得之紊流流場之相關 物理參數(壓力、速度等)做為計算氣動聲場之基礎。在本研究中採用
標準k−ε 紊流模式與 LES 紊流模式計算紊流流場。再將所得模擬紊流 流場中的壓力變動代入 Curle's integral、FW-H 方程式中以計算表 面及空間中之聲場分佈情形。本研究中所使用到的流場與聲場之相關 統御方程式有下列幾項: 2-2-1 連續方程式 在連續體的觀念下,流體質量必須遵守質量守恒。而描述流體質 量變化的方程式便稱為連續方程式(continuity equation)。它描述單位 體積之中流體的淨質量流量必須為零。因為連續方程式是依據質量守 恒的觀念推導而得,而流場中任何一點的質量都必須守恒,故流場中 任何一點的密度及流速(u,v,w)都必須滿足此連續方程式。其表示式如 下: 0 ) ( = ⋅ ∇ + ∂ ∂ V t r r ρ ρ (5) 2-2-2 動量方程式 流體運動具有動量,而在控制容積(c.v.)之內,流體動量之變化是 因為受到外力或流經控制表面(c.s.)的動量通量(momentum flux)所造 成。流體的動量方程式,其表示式如下:
∫
∑
∫
+ ⋅ ∂ ∂ = . . . .V CS C A d V V V d V t Fr rρ rρr r (6) 將動量方程式的觀念應用於流場中任意一點,可推得流速的控制 方程式。而Navier-Stokes 方程式即為微分形式的動量方程式,是流體 運動的基本方程式,流場中任何一點的流速(u,v,w)都必須滿足此方程 式,加上連續方程式及適當的起始和邊界條件,便可求解流場中流速 與壓力隨空間和時間的變化。Navier-Stokes 方程式如下所示: p u u t u −∇ = ⎥⎦ ⎤ ⎢⎣ ⎡ + ⋅∇ ∂ ∂ ) ( ρ2-2-3 紊流模型
在自然界中所看到的流場,因為雷諾數大且流場有許多外加的擾 動,流況大多屬於紊流流場。其流況的速度大多為非均勻分佈,故流 場具有渦度,容易產生渦流,而渦流的速度分佈亦為非均勻,進而衍 生出更多的小渦流。這些微小且快速變化的渦流,若想以直接數值模 擬(Direct Numerical Simulation, DNS)計算紊流流場中所有的渦流,則 數值模式的精確度、計算時距、切割流場的網格皆須比最小渦流之尺 度小,才能正確地計算出流場中所有的變化。由於受限於電腦的速度 及容量,無法直接計算紊流流場中所有渦流每一時刻的變化。現在大 多數的紊流計算模式係將流場內大大小小渦流所造成的紊流動量,以 特定之紊流模式(Turbulence model)計算其紊流通量,再求取流場之時 間平均值。在計算時要將流場範圍以計算網格加以切割,並配合數值 方法,如有限差分法(Finite difference)、有限元素法(Finite element) 或、有限容積法(Finite volume)等,求解流場的控制方程式。但由於 紊流流場與邊界條件、紊流強度或密度差異等流場參數有密切關係, 故紊流模式往往不具有泛用性。本研究使用到k−ε 紊流模式與 LES 紊流模式,分述如下: (1) k−ε 紊流模式 ε −
k 屬於紊流模式 RANS(Reynold Average Navier Stoke
equation)中的一種,其計算的方程式為時均化的 Navier- Stoke 方程式。其統御方程式則有連續方程式、動量方程 式、紊流動能方程式、紊流動量消耗方程式,分別如下: 連續方程式 0 ) ~ ( = ∂ ∂ + ∂ ∂ j i u x t ρ ρ (7) 動量方程式
i i s ij i j j i s x p u u x u t ∂ + ∂ − = − ∂ ∂ + ∂ ∂ ) ~ ( ) (ρ ρ τ (8) j i ij k k ij ij uu x u s − ′ ′ ∂ ∂ − = μ μ δ ρ τ 3 2 2 (9) ) ( 2 1 i j j i ij x u x u s ∂ ∂ + ∂ ∂ = (10) 紊流動能方程式(k-equation) = ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ∂ ∂ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − ∂ ∂ + ∂ ∂ j k t j x k k u k g t g σ μ μ ρ ρ ) ~ ( 1 i i i i t B t x u k x u p p ∂ ∂ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + ∂ ∂ − − + ρε μ ρ μ 3 2 ) ( (11) 其中: j i ij x u s p ∂ ∂ ≡ 2 (12) i t h i B x g p ∂ ∂ − ≡ ρ ρ σ 1 , (13) σk 為經驗值。 紊流動量消耗方程式
(
)
(
)
t B i i i i t t j t j j p k C x u k x u p p k C x u x g t g μ ε ρ μ μ ε ε σ μ μ ε ρ ρε ε ε ε 3 1 3 2 ~ 1 + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ∂ ∂ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + ∂ ∂ − ′ + = ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ∂ ∂ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − ∂ ∂ + ∂ ∂(
)
i i R x u C k e C t ∂ ∂ + − − − ρε ρε ε ε 4 2 2 2 3 . 0 1 (14) 其中:[
2]
0.00375Re2 2 2 3 . 0 1 33 . 1 t e y y k P e p t R − − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + − ≡ ′ μ μ (15) ε ρ μ μ μ 2 k C f t = (16)[
]
⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − = − y y e f Re 29 . 5 1 1 0.0198Re μ (17) ν k y y = Re (18) ε σ ,Cε1,Cε2,Cε3,Cε4為經驗值,各係數值如表2-1 所示。 表2-1 標準k−ε紊流模式係數 μ C σk σε σh σm Cε1 Cε2 Cε3 0.09 1.0 1.22 0.9 0.9 1.44 1.92 -0.33 (* 3 =1.44 εC forpB >0 and is zero otherwise)
(2)LES 紊流模式
LES 將流體物理量區分為大尺度(large-scale)與次格點尺 度(subgrid scale)兩部分。對於大尺度的物理量在 LES 中 直接由 Navier-Stokes 方程式求解,而在次格點尺度內的 物理量則需要模式化。目前大部分的次格點尺度流體剪應 力模式(subgrid-scale stress models)是以流體應力假設為基
礎,其中最常被引用的模式為Smagorinsky 次格點尺度流
體剪應力模式。小渦流的性質和雷諾數無關,故小渦流部 分使用模式計算,而大渦流部分則使用數值計算。其中渦 流大小的劃分採用過濾(filter)方法,用 filter function 將計 算範圍確定。 ) , ( ) ( ) , (r t U r U r t U = + ′ 以波數(wave no.)空間,U ′( tr, )表示某些波數的組合
∫
∞ ′ = ′ r t U r t e dk U ˆ ( , ) ikr ) 2 ( 1 ) , ( 3 π (19) 具有空間和時間性質的物理量, f( tr, )之局部空間平均) , ( tr f 為
∫
∞ ′ ′ ′ = G r r f r t dr t r f( , ) ( , ) ( , ) (20) ) , ( rr G ′ 為filter function 其中較常見的 filter function 有下列幾種: (a)Gussian filter function:⎥ ⎦ ⎤ ⎢ ⎣ ⎡ Δ ′ − − Δ × = ′ 1 exp 6( 2 ) 6 ) , ( i i i i i i x x x x G π (21)
(b)Top hat filter function: i Δ 1 2 2 i i i i i x x x −Δ < ′ < +Δ = ′) , (xi xi G (22) 0 Otherwise (c)sharp cutoff filter function:
) ( ) ( 2 ) , ( i i i i i in i i x x x x S x x G ′ − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ Δ ′ − − = ′ π π (23) 其中 Δi:filter function f(r)= f(r)+ f′(r) 如果利用(18)式對 Navier-stokes 方程式過濾,且是在不 可壓縮條件得: =0 ∂ ∂ t ui j ij j i i j i j i x x u x P x u u t u ∂ ∂ − ∂ ∂ + − = ∂ ∂ + ∂ ∂ ν τ ρ 2 2 1 τij =uiuj −uiuj =Lij +Cij +Rij 其中各項所代表的物理意義分別為: Lij(Leonard)項:uiuj −uiuj 大渦流因和小渦流之間干涉作用而承受應力,此應
力 擔 負 部 分 大 渦 流 能 量 的 耗 散 , 使 用 不 同 之 filter function,渦流尺寸會有不同。若使用 sharp cutoff filter function,小渦流完全被過濾,無干涉作用產生,此項則 為零。 Cij(Cross 項):ui +u′j +ujui′ 負擔相當部分之渦流能量之散逸,需 modeling,若 以體積平均作為 filtering,則Lij和Cij不會出現。Lij、Cij和 ij R 大小約為同 order,Lij+Cij有相互抵銷的作用,若兩項 同時忽略,誤差很小。 Rij(Reynold 項):u ′i′uj
SGS(subgrid scale)model 通 常 指 Reynolds stress 項,負擔大部分小渦流,對大渦流的干涉行為,並含能 量散逸。 ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ∂ ∂ + ∂ ∂ − = ′ ′ − ′ ′ = ( ) 3 i j j i t k k ij j i ij x u x u u u u u R ς ν 在Rij項內,小渦流導致之垂直應力uk′uk′ 的平均值,包含 在大渦流的靜壓力項P減掉垂直應力部分。 P=P+ ρu′ku′k 3 1
(
)
2 1 2 2 ) ( 2 1 ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ∂ ∂ + ∂ ∂ Δ = i j j i s t x u x u C ν(
)
3 1 3 2 1Δ Δ Δ = Δ KG p P 3 1 + = ρ(
)
2 2 Δ = ν ν C K t G Cν =0.094 Cs:0.1 壁面紊流;0.25 等方向性紊流;0.15 介於上述 兩者之間 Δ:間距 1:X 2:Y 3:Z2-2-4 聲場方程式 (3)Lighthill 方程式 將連續方程式與動量方程式結合以推導出 Lighthill 方程式。 0 = ∂ ∂ + ∂ ∂ j i v x t ρ ρ (24) j ij i j i j i y e y p y v v v ∂ ∂ + ∂ ∂ − = ∂ ∂ + ∂ ∂ ) ( τ ρ (25) (24)為連續方程式,(25)為動量方程式,其中eij為黏滯性 所造成的作用力。對Stokes 氣體而言,我們可以用速度梯 度表示如下: ) 3 2 ( ( k k ij j i j i ij y v v v y v e ∂ ∂ − ∂ ∂ =μ ρ δ (26) μ為流體的黏滯係數 接著將(25)動量方程式移項整理得: ) ( i j ij ij j i vv p e y v + − ∂ ∂ − = ∂ ∂ ρ ρ δ τ (27) 再將(27)式的兩邊加上 i y c ∂02 ∂ρ ,可表示成: i ij ij j i j i i y c e v v y y c v ∂ ∂ + − + ∂ ∂ − = ∂ ∂ + ∂ ∂ ρ ρ ρ δ ρ τ 02 2 0 ( ) 將等式右邊再合併整理可得出:
[
]
{
i j ij ij}
j i i vv p p c e y y c v + − − − − ∂ ∂ − = ∂ ∂ + ∂ ∂ ) ( ) ( 2 0 0 0 2 0 ρ δ ρ ρ ρ ρ τ 令Tij =ρvivj +[
δij(p− p0)−c02(ρ−ρ0)]
−eij 則方程式可再進一步表示成: i j ij i y c y T v ∂ ∂ − ∂ ∂ − = ∂ ∂ ρ ρ τ 02 (28)再來,將(24)連續方程式的兩邊作時間的微分,可得: 0 2 2 = ∂ ∂ ∂ + ∂ ∂ i i v y ρ τ τ ρ (29) 將(29)式的第二項予以分解 ) ( i i i i v y v y ρ τ ρ τ ∂ ∂ ∂ ∂ = ∂ ∂ ∂ 其中∂τ ρvi ∂ 以(28)式帶入,導出: ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ − ∂ ∂ − ∂ ∂ = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ ∂ ∂ i j ij i i i y c y T y v y ρ ρ τ 2 0 將此結果帶入(27)式中,進一步推導出: 0 ) ( 2 0 2 2 = ∂ ∂ − ∂ ∂ − ∂ ∂ + ∂ ∂ i j ij t y c y T y ρ τ ρ 再經整理後,得到Lighthill 方程式: j j ij i i y y T y y c ∂ ∂ ∂ = ∂ ∂ ∂ − ∂ ∂ 2 2 2 0 2 2 ρ τ ρ 將結果再次敘述如下: j i ij x x T c ∂ ∂ ∂ = ′ ∇ − ∂ ′ ∂ 2 2 2 0 2 2 ρ τ ρ (30) 從(30)式中可很清楚發現,Lighthill 方程式與波動 方程式的形式非常接近,差別只在於 j i ij y y T ∂ ∂ ∂2 所造成的非齊 次項而已。因此我們可將Lighthill 方程式視為在流場中會 產生音源 j i ij y y T ∂ ∂ ∂2 ,此音源讓流場所產生的聲響以聲音的波 動方式 ρ − ∇ ρ′ ∂ ′ ∂ 2 2 0 2 2 c t 傳遞出去。我們可觀察發現等號兩邊的 變數是相互包含,因此可由數值方法上獲得其解。但因方 程式中,擾動值與平衡值的大小差異太大,以至於不易獲
得精確的數值解。為了解決此問題,Lighthill 在[13]中提 出方程式右邊的非齊次項可利用實驗或 CFD 的方法求得 再代入(30)式中,而可將其視為典型的聲學波動方程式, 並且可利用數值方法或聲學分析的方法,得出精確的聲場 分布,此即為 Lighthill analogy。 而為了讓 Lighthill analogy 更加有實用性,我們可 對(30)式中的Tij項做出合理的假設與簡化: z 假設流場為紊流,忽略eij所造成的黏滯性作用力 (即eij=0),於是Tij =ρvivj +[δij(p−p0)−c02(ρ−ρ0)]。 z 流 動 過 程 為 一 等 熵 過 程 (isentropic) , 所 以 ) ( ) ( 2 0 0 0 ρ ρ δij p− p =c − , Tij 可 再 進 一 步 簡 化 成 j i ij vv T =ρ 。 z 假設流速為低馬赫數,所以密度為定值,於是 Lighthill 方程式可以簡化成 j i j i y y v v c ∂ ∂ ∂ = ′ ∇ − ∂ ′ ∂ 2 0 2 2 0 2 2 ρ ρ τ ρ (31) 或 j i ij x x T P t P C ∂ ∂ ∂ = ∇ − ∂ ∂ 2 2 2 2 2 1 (32)
此即為 Lighthill’s Stress Tensor 的簡化。 (4) Curle’s integral Curle 在[22]中依據 Lighthill 理論導出在固體表面壓力擾動 所產生的聲壓輻射的方程式,其表示如下: ( ) ( , ) ( , ) ( ) 4 1 ) , ( ) , ( 2 0 0 y dS y dS y t p r n y x a p t x p t x p i i i rτ rτ r π ∂ ∂ − = − = ′
∫
(33) 其中τ 是散射的時間(emission time),p是表面壓力, n是 wall 的正交方向,p′是聲壓,a0是聲音的速度(5)Fwfows Williams and Hawkings 方程式
Fwfows Williams and Hawkings 方程式可用來解波動方程 式中作用在靜止介質所產生單極、偶極及四極聲源在空間傳遞的 聲音。而這些作用的外力可藉由 CFD 的解題器求得。其表示式如 下: j i ij i i x x T x F t Q a t ∂ ∂ + ∂ ∂ + ∂ ∂ = ∇ − ∂ ∂ 2 2 2 0 2 2 ρ ρ (34) 其中, t Q ∂ ∂ 是由流體體積經由移動表面所造成的暫態位移 所導致並可說明單極聲源的分佈狀況。 i i x F ∂ ∂ 是由流體作用在固體 表面所導致,它可表示偶極聲源的分佈情形。 j i ij x x T ∂ ∂ ∂2 是 Lighthill’ tensor,它是由於流體流動的結構所導致,可說明四極聲源的分 佈。
第三章 數值方法
本研究採數值方法求解,應用 CFD 軟體 FLUENT 做為計算平
台,採κ-ε模式與LES 模式及在不可壓縮條件下,解三維穩態與暫
態 Navier-Stokes equation, 並 利 用 有 限 容 積 法 (finite-volume) 及 SIMPLE 演算法來計算穩態與暫態流場,物理變數定義於每個控制容 積中心做積分而求得,將k−ε 模式所得的結果代入 Curl’s integral 求 解物體表面之偶極聲源分佈。另將k−ε 所得之流場物理變數(壓力、 速度等)做為 LES 模式的初始條件,而採 LES 模式所得的結果代入 FW-H equation 以求解接收處之聲場頻譜。模擬流程如圖 3-1 所示。 圖3-1 模擬流程 決定模型之類型 Pro/E 模型繪製 Gambit 流場域建構網格 格點測試 Fluent 模擬參數設定 暫態流場分析 ε − k 紊流流場分析 LES 紊流流場分析 表面聲場分佈 接收點聲場頻譜
3-1 邊界設定 在求解流場相關物理現象前先設定流場域(如圖 2-4)之邊界條 件。本文假設流體為不可壓縮空氣,其各項性質為常數。 流場域之相關邊界條件如下: 1.入口條件: X=-3D,u=Vin,v=0,w=0 2.出口條件: X=9D,P=Patm 3.上邊界 Y=7H,右邊界 Z=+4W,左邊界 Z=-3W,速度梯度=0 下邊界 Y=0,u=0,v=0,w=0 3-2 模型網格建構與格點測試 在運用Fluent 求解前,需先將流場域劃分網格。而品質好的網格 可以使計算疊代次數較少,結果也較為準確;相反的,不好的網格品 質會造成數值計算的發散或無法收歛,而網格數目之多寡會影響分析 結果及計算時間。本研究先以 Pro/E 3D 繪圖軟體繪製模型,再匯入
Gambit 前處理軟體構建流場域網格,進行格點測試(Grid independent test) ,由於聲場的產生來自於壓力之擾動,故採用壓力係數 (pressure coefficient),即Cp值,做為格點測試之依據。測試的格點數目分別為 測試 1:1442,947、測試 2:1524,708、測試 3:1619,276、測試 4: 1760,054、測試 5:1913,706、測試 6:2024,295,結果如圖 3-2 所示, 由圖中可看出當格點數目超過1760054,其Cp值已接近穩定,因此選 定格點數目測試 4 之 1760,054 網格數。網格之分割乃藉由局部劃分 更細的網格區域,將誤差降至最低,如圖3-3 所示。
圖3-2 格點測試 圖3-3 網格建構 3-3 求解暫態紊流流場 邊界條件設定完成後,接下來求解流場物理現象(壓力分佈、速 度分佈等)。本文採用 SIMPLE 演算法來計算穩態流場與暫態流場, 直接對控制體積積分,計算過程中各變數的殘值(Residual) 收斂標準 訂為 1.0×10-3,其計算流程如圖 3-4 所示。所有模型的流場模擬均是 = 2 2 1 U P ρ Δ
先求穩態收斂後,再將所得之物理參數當做暫態求解之初始值,用以 計算暫態之k−ε 模式並啟動邊界層聲源模組。此步驟主要是在計算流 體作用在物體表面上的作用力所造成的偶極聲源,以了解表面之聲場 分佈情形。 圖 3-4 計算流程圖 3-4 接收點之聲場頻譜 在完成k−ε 紊流模式計算紊流流場後,將其結果做為 LES 模式 計算紊流流場之初始條件, LES 模式的暫態模擬先是以時間步階 0.002 秒做為初始的模擬,當監控行李架表面靜壓達到動態穩定(即其 值在平均值之上、下週期振盪)後,如圖 3-5,時間步階逐步調到 5e-06 Update varibles
Solve momentum equations
Solve pressure-correction(continuity)equation Update pressure,face mass flow rate
Solve turbulence equations
Converged? No
Solve acoustic equations Yes
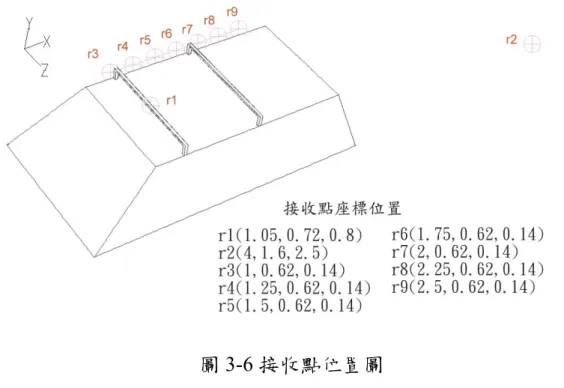
秒。接下來啟動FW-H 模組計算聲源資料,其時間步階保持不變,每 次時間步階的連續方程式和動量方程式的計算設定均收斂到 1.0×10-3 以下,執行12000 次疊代。疊代完成後,再設定接收點,由於計算所 得之靜壓是時間的函數,因此所設定接收點的暫態壓力變化將進行快 速傅立葉轉換成聲壓頻譜,其單位由Pa 變成 dB。藉由這些聲壓頻譜 將有助於了解不同頻率之噪音分佈情形。本研究設定九個接收點,其 位置及座標如圖3-6 所示。 圖 3-5 動態穩定之監控
第四章 結果與討論
本文從三個方向(1)幾何外型(2)流場速度改變(3)行李架高度改變 等三個方向,探討加裝行李架對氣動聲場之影響。外型改變的模擬 中,以市面上常見的方形行李架為主,探討未加裝行李架、加裝方形 行李架及外型改變為半圓形的行李架的氣動聲場分佈情形。流場速度 改變則探討加裝方形行李架之模型,在時速 60 公里(16.67m/s)、108 公里(30m/s)及 180 公里(50m/s)之速度行駛下的氣動聲場分佈情形。 至於行李架下緣與車頂表面距離改變,則以加裝方形行李架之模型為 基礎,改變行李架下緣與車頂表面之距離分別為10cm、5cm 和 0cm, 探討距離改變對氣動聲場之影響。 4-1 外型改變 在外型變化研究中,探討未加行李架之模型A、加裝方型行李架 之模型 B 與加裝外形為半圓形行李架之模型 C 等三個模型,在流場 速度為30m/s 的氣動聲場現象,模擬結果如下:。 1、速度分佈 圖4-1 為流體流經未加裝行李架的模型 A 時,遇到車體表面受阻 後向兩側及上方分流,並於車體後方形成不穩定尾流區( wake flow), 經過約半車的距離後恢復成層流流動模式。由圖(a)中可很楚清看到流 體流經模型 A 之 A 柱產生渦流撞擊車前側窗及其相對之車頂位置, 並在車後方形成拖曳渦流( Trailing vortexs) ,此現象與圖 1-7 所示之 流體流經汽車所造成的渦流流動方式近似。圖(b)為取平面 z=0.8m 之 速度向量圖,由圖中可知,流體先是穩定地流經車頭前端後,有少部 分氣流在左下角呈現慢速紊亂流動,而大部分之流體沿車前擋風玻璃 上行,至車頂前方轉角處因表面方向改變而加速,而在車頂上方近邊 界處因邊界層之黏滯效應有部分迴流產生,此可由圖(b)下方之局部放大圖看到,並隨著上方流體之帶動而流向後方。而流體流向車後方形 成低速渦流並以順時針渦流流動後再隨上方之流體向後方流動。圖(c) 為取平面 z=0.8m 之 y 方向速度等位線,由圖中可看出車頂前上方近 表面處有流動不穩定的現象,此與圖(a)之 A 柱渦流流過之位置相吻 合,隨後流動漸漸整合平穩地往後方流動到了車後方才又因在車後方 產生的低速渦漩而有流動不穩現象之發生。 圖4-2 為加裝方型行李架的模型 B 在流體流過時的流動現象,由 圖(a)可看出與圖 4-1(a)同樣在遇到車體表面受阻後向兩側及上方分 流,並在流經 A 柱後亦產生渦流,但由於加裝行李架,此渦流持續 沿車頂側邊直到車後方成為拖曳渦流,而向上方之氣流在車頭前方轉 角處加速通過後尚未回復原先之流速時又因遇到前行李架之阻礙而 再次分流,並於前行李架後方形成類似渦流散逸之不穩定擾動現象, 此不穩定現象到後行李架前方已趨於平穩,故流經後行李架時,只有 在接近行李架壁面附近不穩定,隨後就恢復平穩。由於此方形行李架 屬上下對稱,故在取平面z=0.8m 之速度向量圖(b)中,其下方之放大 圖中可看到前行李架上、下方氣流加速呈現對稱之型態,而後行李架 之上、下方之加速現象亦是對稱,但速度增加的幅度較小。由取平面 z=0.8m 之 y 方向速度等位線圖(c)中可看到前行李架後方之速度梯度 變化較大故可知此處有不穩定流動現象,而後行李架後方之流動現象 在相較下因速度梯度變化較為平緩故較為穩定。 圖4-3 為加裝半圓形行李架的模型 C 在流體流過時的流動現象, 由圖(a)可看出流體遇到車體表面受阻後向兩側及上方分流,而上方分 流之氣流在流經前行李架後方的分離區後即順著流線向後行李架流 動,在兩行李架中間的流線幾近平順,只有前行李架兩側之支柱產生 一些渦流擾動,隨後亦隨上方之流線流向後行李架,而流向後行李架
前的流速較流向前行李架之流速慢,因此流線在後行李架上方之加速 情形較前行李架小,且在相對動能較小的情況下,其產生的流線弧度 較大。由圖(b)中亦可發現流體在車頂轉角處加速流動,在恢復原先速 度前又遇到前行李架而再次加速分流,因半圓弧形狀之關係,在前行 李架之上方、下方之加速呈現不對稱現象。在前行李架圓弧上端處產 生最大流速,可由下方之前行李架放大圖中可看出前行李架邊緣的速 度變化情形。由前行李架到後行李架之間,可看出在前行李架後方合 流的流體流到後行李架前已趨穩定,故在遇到後行李架再次分流時, 其加速狀況就不會如在前行李架前之急劇。圖(c)是取平面 z=0.8m 之 y 方向速度等位線圖,由圖中可看到前行李架上前方之流動很不穩定 因其速度梯度變化最急劇,而由於圓弧之外形使得在前行李架後方之 流場很快就趨於穩定,而流到後行李架後方又更加穩定。綜合這三種 模擬以模型B 的流場最紊亂其次是模型 C,而模型 A 為相對穩定。 2、壓力分佈 圖4-4 為模型 A 受流體作用之壓力變化情形。由圖(a)中可以看到 流體流經車前擋風玻璃時造成推擠而形成壓力集中之情形。在圖(a) 中可看出車前擋風玻璃之中下方有壓力最大集中處,因流體流至此處 受阻後相互推擠故造成壓力集中,而在車頂轉角處因流體加速流過, 故產生最小低壓區,由下方之放大圖可清楚看到最小低壓之位置。車 前迎風面轉角處兩側也有相對低壓產生。圖(b)是取平面 z=0.8m 之壓 力等高圖,圖中可清楚看到迎風面處之壓力梯度變化,而其下方之車 頂轉角放大圖中之可明顯看出最小低壓發生在轉角處。 圖4-5 為模型 B 受流體作用之壓力變化情形。由於在車頂加裝行 李架,從圖(a)中可看出行李架之迎風處有高壓力發生,且因與流場方 向垂直故有最大壓力之產生。車頂及兩側轉角處亦同樣有相對低壓區
之產生,而前、後行李架與車頂之間因流體流經狹小空間產生加速作 用,故在此區表面亦有相對低壓產生,由圖中下方之放大圖知,最低 壓力區集中在車頂轉角處,而前行李架正面有最大壓力值。圖(b)是取 平面 z=0.8m 之壓力等高圖,由其中可看出最大壓力值發生在前行李 架之正面迎風處,而車前擋風玻璃之壓力值相對較低,對照圖 (b)之 車前擋風玻璃面上的壓力值與圖4-4(b)模型 A 相同位置處大約相同。 但其最高壓力在行李架前方產生,且壓力梯度變化更急劇,左下圖可 看到行李架迎風面有最大壓力區,上方及下方為壓力分佈對稱之相對 低壓而後方亦有相對低壓區。右下圖為後行李架周圍之壓力分佈情 形,其壓力分佈亦是呈現上、下對稱之相對低壓,及前方為相對高壓 與後方相對低壓之型態。相較之下,前行李架產生之高壓較後行李架 高,而低壓又較後行李架低,故流體對前行李架所產生之壓力梯度變 化較大。 圖4-6 為模型 C 受流體作用之壓力變化情形。模型 C 因為裝設半 圓形行李架,其行李架上的壓力分佈不對稱,由圖(a)中可看到最高壓 區,在兩側支柱上前方近行李架處。而車前擋風玻璃中下方之高壓區 的值與圖 4-4(a)和圖 4-5(a)之同一區的值近似。但最小低壓區卻移到 前行李架之正上方,由圖(a)下方之放大圖可清楚看到行李架上方有局 部分散的最小低壓區,這是因為圓弧形使得氣流在前方分流後加速通 過上方以和下方氣流會合,因此產生低壓區,由圖4-3(b)之速度向量 圖可看到此處是整個流場中速度最大的位置。圖(b)是取平面 z=0.8m 之壓力等高圖,可明顯看出圖中之中下方前行李架放大圖,其圓弧正 上方有最小低壓區產生,而前方迎風面所受的壓力不像圖4-5(a)為整 個流場中的最大壓力區,另外可明顯看出後方與下方的壓力值較一 致,而模型B 之圖 4-5(b)下左方的前行李架放大圖則顯示出上、下及
後方之壓力值較模型C 之前行李架同一區域附近的值為低。由下圖左 的車頂轉角處放大圖可看出此處之壓力值不是最低值。下圖右是後李 架之壓力分佈放大圖,其壓力變化方式與前行李架類似,只是迎風面 不是最大壓力區,而上方也不是最小壓力區。綜合這三種模擬以模型 B 有最大正壓區,而 C 有最小低壓區,而其餘位置之壓力變化方式大 約與模型A 相似。。 3、表面聲場 圖 4-7 為模型 A 受流體作用之表面聲場分佈情形,由圖(a)知車頂 表面聲壓值以前端最高而向後方逐步降低,而車側面轉角處亦是如 此。圖(b)是模型 A 表面壓力等高線,由對照圖(b)之表面壓力梯度分 布可知,表面聲場之強弱與壓力梯度有關,壓力梯度變化較急劇的地 方即是聲壓值較大的地方,由左下角之車前側面壓力梯度變化與右邊 之車頂轉角附近之壓力梯度變化,明顯分辨出以車頂轉角附近之壓力 梯度變化較劇烈的區域較多,故相對高聲壓值之區域亦較大。經計算 模型A 之表面最大聲壓值為 73.3487dB。 圖4-8 為模型 B 受流體作用之表面聲場分佈情形。由圖(a)可看出最 高聲壓值集中在前行李架迎風面處,次高處在車頂前緣附近與車側前 緣附近。車頂後方出現有較低聲壓值區,對照模型A 之圖 4-7(a)是相 對較高的,將車頂前方轉角附近及車前側面附近的聲壓值做比對則較 無明顯差異,而觀察兩行李架之間的車頂表面聲壓值變化情形,亦可 對照出有較低聲壓值之產生,由此可判斷加裝行李架對後方之表面聲 場是有影響的。圖(b)是模型 B 表面壓力等高線,由對照圖(b)之表面 壓力梯度分布可再次驗證壓力梯度之變化與聲壓值成正相關。經計算 模型B 之表面最大聲壓值為在前行李架迎風面上的 105.0957 dB。 圖 4-9 為模型 C 受流體作用之表面聲場分佈情形。由圖(a)可看
出最高聲壓值位在前行李架支柱上緣近行李架之轉角迎風面處,次高 處在行李架上,再來才是在車頂前緣附近與車側前緣附近。車頂後方 出現有較低聲壓值區,對照圖4-7(a)是相對較高的,另再把車頂前方 轉角附近及車前側面附近的聲壓值做比對則較無明顯差異,而再觀察 車頂兩行李架間之區域的聲壓值變化情形,亦可對照出有較低聲壓值 之產生,再次驗證加裝行李架對後方之表面聲場是有影響的。圖(b) 是模型 C 表面壓力等高線,由對照圖(b)之表面壓力梯度分布亦是樣 驗證壓力梯度之變化與聲壓值成正相關。經計算模型C 之表面最大聲 壓值為95.06 dB。綜合這三種模擬之聲場表現,大致上,高聲壓之位 置均集中在迎風面,而前行李架前方之車頂表面之聲場表現方式幾乎 一致,而在加上行李架後之表面聲場才有差異。 4、聲場頻譜 頻率分析主要是把時間域的訊號轉成頻率域的訊號,其目的在於 探討訊號中頻率域的個別成分所包含之振幅值,以了解那一部分的頻 率對整體訊號有較大的影響。本研究主要是以模型B 為基礎,研究重 點在於:(1)了解加裝行李架對氣動聲場之影響,(2)在速度變化下, 加裝行李架對氣動聲場之影響,(3)行李架的高度對氣動聲場之影響。 故先探討模型B其行李架高度為10cm 而流速為 30m/s 時之接收點的 聲場頻譜分佈情形。接收點 r1 在車正中央、r2 在車後較遠處、r3-r9 在近車頂附近,各接收點之位置請參見圖3-4。 圖4-10 為模型B其行李架高度為 10cm 而流速為 30m/s 時之接收 點的聲場頻譜分析結果,圖(a)至(i)依序為接收點 r1 至 r9 之(左)聲壓 位準圖、(右)功率頻譜密度圖。由圖中可發現同一接收點之聲壓位準 最高值恰好是功率頻譜密度之最大值,且均落在同一頻率上。將每一 接收點之最大聲壓值、最大功率頻譜密度及其頻率整理成表 4-1,由
![圖 1-4 分貝值變化與倍數關係圖(摘自參考資料[3]) 1-3 氣動噪音與文獻回顧 要改善氣動噪音,要先了解氣動聲學。陳金文在[4]中對氣動聲學 所下是定義是:凡是以空氣為介質經由流體流動而產生的聲音均是氣 動聲學所探討的領域,基本上分成兩類,一類為自由流束之氣動聲, 另一類為自由流束與物體邊界之交互作用之氣動聲。氣動聲是由壓力 的快速變動以波動方式在聲速下傳遞所造成。聲波是一種易於感受卻 不易觀察的波動現象,它與人類生活息息相關,因為它是人類相互溝 通、傳遞信息的主要方式。聲波的產生起因於具應變特](https://thumb-ap.123doks.com/thumbv2/9libinfo/7270637.69477/15.892.244.692.106.433/而產生類一類為自由流氣動另一類為自由流之交互作用之是一種易於.webp)
![表 1-1 基本氣動力聲源(摘自參考資料[5]) 第一項 第二項 第三項 發生機制 流體內應力 流 體 加 之 於 固 體 表面之變動壓力 運動固體邊界造成之體積位移 聲源 四極聲源 偶極聲源 單極聲源 速度相關性 ~ U 8I I ~ U 6 I ~ U 4 代表例 噴射流 風扇、邊界層 氣蝕、活塞 汽車所產生的氣動聲源屬於偶極聲源與四極聲源。George 在[6] 中指出當在汽車室內噪音 70-80dB(A)的範圍內長途開車時會造成疲 勞。故基於道路安全駕駛的因素,汽車](https://thumb-ap.123doks.com/thumbv2/9libinfo/7270637.69477/17.892.127.758.123.523/運動固四極聲源噴射流邊界氣蝕活塞汽車所產生氣動聲源中指出汽車.webp)
![圖 1-5 不同流動機制其相關的氣動噪聲頻譜(摘自參考資料[7])](https://thumb-ap.123doks.com/thumbv2/9libinfo/7270637.69477/22.892.133.756.615.961/圖15不同流動機制其相關的氣動噪聲頻譜摘自參考資料7.webp)
![圖 1-6 流體從垂直邊緣處分離所捲起的大渦漩及再分裂的小渦漩 (摘自參考資料[7])](https://thumb-ap.123doks.com/thumbv2/9libinfo/7270637.69477/23.892.136.758.106.382/流體從垂直邊緣處分離所捲起的大渦漩及再分小渦漩摘自參考資料.webp)