國
立
交
通
大
學
資訊科學與工程研究所
碩
士
論
文
基 於 H . 2 6 4 視 訊 編 碼 在 畫 面 略 過 轉 換 下
之 區 塊 模 式 決 定 與 移 動 向 量 預 測
Block Motion Decision and Motion Vector Composition
in H.264 Video Frame skipping Transcoding
研 究 生:李威邦
指導教授:蔡文錦 教授
基 於 H.264 視 訊 編 碼 在 畫 面 略 過 轉 換 下
之 區 塊 模 式 決 定 與 移 動 向 量 預 測
Block Mode Decision and Motion Vector Composition
in H.264 Video Frame Skipping Transcoding
研 究 生:李威邦 Student:Wei-Bang Li
指導教授:蔡文錦 Advisor:Wen-Jiin Tsai
國 立 交 通 大 學
資 訊 科 學 與 工 程 研 究 所
碩 士 論 文
A ThesisSubmitted to Institute of Computer Science and Engineering College of Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Computer Science
June 2008
Hsinchu, Taiwan, Republic of China
基於 H.264 視訊編碼
在畫面略過轉換下之區塊模式決定與移
動向量預測
學生 : 李威邦
指導教授 : 蔡文錦 教授
國立交通大學
資訊科學與工程研究所
摘 要
近年來,許多應用如即時線上播放系統、視訊會議、手持式多媒體、網路媒 體快速瀏覽等需求大量提升。使用者期望在有限的網路傳輸速率以及既有的硬體 設備下,能夠接收高品質的視訊畫面;而系統開發者除了追求能將高畫質的視訊 影片,能以較低的位元壓縮率傳輸外,尚能提供流暢地視訊快速播放閱覽的功能。 在這篇論文當中,我們提出了一個適用於 H.264/AVC 視訊壓縮編碼標準下, 利用畫面省略的轉換編碼方式來降低傳輸位元大小以及所需的視訊壓縮時間。其 中的議題包含在省略畫面的情形下如何解決區塊分割大小模式的決定、區塊移動 向量計算方法。 由實驗的結果可知,我們所提出的方法相較於 H.264/AVC 畫面略過的壓縮以 及其他方法,在維持一定的視訊品質之下,大量的縮減壓縮的時間,並亦能傳輸 於在低位元傳輸率中。 關鍵字:畫面略過轉換、區塊模式決定、移動向量計算Block Mode Decision and Motion Vector Composition
in H.264 Video Frame Skipping Transcoding
Student: Wei Pang Lee
Advisor: Dr. Wen-Jin Tsai
College of Computer Science
National Chiao Tung University
Abstract
In recent years, many multimedia applications such as real-time video streaming
systems, videoconference, handheld media systems, and high-speed video browsing
through networks are required. Users expect to receive high quality of video under
limited network bandwidth and established hardware equipments. Oppositely, system
providers pursue services of high video quality through low bit-rate transmission in
order to reduce the cost and provide more services.
In this thesis, we focus on a frame-skipping transcoding methods to reduce the
bit-rate for H.264/AVC video coding. We have proposed block mode decision
methods, motion vector composition methods for frame-skipping transcoding.
Experimental results show that, compared with H.264/AVC and other algorithms,
the proposed methods can save a lot of computational cost. The performance can be
improved by maintaining visual quality at low bit-rate.
Table of Contents
CHAPTER 1 INTRODUCTION...1
MOTIVATION...4
CHAPTER 2 BACKGROUND AND RELATED WORK ...5
2.1H.264/AVC ...5
2.2VIDEO TRANSCODING...8
2.3MOTION VECTOR COMPOSITION... 11
CHAPTER 3 THE PROPOSE METHOD ...16
3.1SYSTEM ARCHITECTURE...16
3.2PROPOSED BLOCK MODE DECISION METHOD...18
3.3PROPOSED MOTION VECTOR COMPOSITION METHOD...22
3.3.1 Enhanced FDVS Method for H.264/AVC ...23
3.3.2 Enhanced ADVS Method for H.264/AVC ...26
3.4MVSELECTIONS FOR MODE CHANGE AND NO MODE CHANGE...28
3.5APPLY MOTION VECTOR COMPOSITION...29
CHAPTER 4 EXPERIMENTAL RESULTS...31
4.1FDVS,ADVS, AND PADVS(N)METHODS ON LARGE BLOCK SIZES...32
4.2PROPOSE METHODS ON ALL BLOCK SIZES...35
4.3MVSELECTIONS FOR MODE CHANGE AND NO MODE CHANGE...39
CHAPTER 5 CONCLUSION...41
REFERENCE ...42
APPENDIX A...43
APPENDIX B...47
List of Figures
FIG.1-1BASIC TRANSCODING ARCHITECTURE...2
FIG.2-1H.264/AVCENCODER...6
FIG.2-2VARIABLE BLOCK SIZE IN H.264/AVC ...7
FIG.2-3COMPUTATION OF RDCOST...7
FIG.2-4FRAME SKIPPING TRANSCODER IN PIXEL DOMAIN...10
FIG.2-5BLOCK MATCHING MOTION ESTIMATION ALGORITHM...12
FIG.2-6INTERPOLATION OF MOTION VECTORS...12
FIG.2-7MOTION VECTOR COMPOSITION...13
FIG.2-8BACKWARD MVCOMPOSITION:MVC=MV1+MV2+MV3...14
FIG.2-9FDVSCOMPOSITION SCHEME...14
FIG.2-10ILLUSTRATION OF THE ADVSALGORITHM...15
FIG.3-1PROPOSED H.264/AVC VIDEO FRAME SKIPPING TRANSCODING ARCHITECTURE...16
FIG.3-2FLOWCHART OF PROPOSED BLOCK MODE AND MVDECISION METHODS...18
FIG.3-3DIVIDE INTER BLOCK...20
FIG.3-4FLOWCHART OF MODE DECISION...21
FIG.3-5VARIABLE BLOCK MODE...21
FIG.3-6MODE CHANGE RESULT...22
FIG.3-7AN INTER 4X4FDVSUNIT...23
FIG.3-8(A)FDVS EXAMPLE (B)ORIGINAL FDVS METHOD (C)ENHANCED FDVS METHOD...25
FIG.3-9ENHANCED FDVSEXAMPLE RESULT...26
FIG.3-10AN 4X4INTER ADVSUNIT...27
FIG.3-11SMB8X4,SMB4X8,SMB8X8CHECK ENDPOINT...27
FIG.3-12APPLY ADVSEXAMPLE...28
FIG.3-13MV SELECTIONS FOR (A) MODE CHANGE AND (B) NO MODE CHANGE...29
FIG.3-14APPLY MOTION VECTOR COMPOSITION...30
FIG.4-1DIFFERENT METHODS IN PSNRFRAME BY FRAME IN FOREMAN...34
FIG.4-2COMPARISON ENCODING TIME WITH TRANSCODING TIME FRAME BY FRAME IN FOREMAN...35
FIG.4-3BIT-RATE OF DIFFERENT METHODS IN FOREMAN...38
FIG.4-4BIT-RATE OF DIFFERENT METHODS IN NEWS...38
List of Tables
TABLE 3-1RULES OF MODE CHANGE...20
TABLE 4-1EXPERIMENTAL RESULTS OF FDVS,ADVS AND PADVS(N) ON FOREMAN.CIF...33
TABLE 4-2PROPOSE METHODS COMPARING TO H.264(FOREMAN)...36
TABLE 4-3PROPOSE METHODS COMPARING TO H.264(NEWS) ...36
TABLE 4-4PROPOSE METHODS COMPARING TO H.264(HALL)...36
TABLE 4-5BIT-RATE OF PROPOSE METHODS COMPARING TO H.264 ...37
TABLE 4-6COMPARING MODE CHANGE WITH NO MODE CHANGE IN FOREMAN...39
TABLE 4-7COMPARING MODE CHANGE WITH NO MODE CHANGE IN NEWS...39
Chapter 1 Introduction
The video coding standard MPEG-4 Part10 AVC/H.264 [1] was developed by the
joint video team (JVT) of ISO/IEC (MPEG) and ITU-T (VCEG). The video coding
standard is based on traditional hybrid coding scheme but with several additional
methods to attain high coding efficiency such as adaptive motion compensation with
variable block sizes, multiple reference frames, intra coding with various spatial
prediction directions, and so on. The new technologies mentioned above are quite
important to many networked multimedia services such as multipoint video
conferencing, distance learning, video on demand, and digital TV. Transmission of
compressed video over heterogeneous networks with different transmission
bandwidths may require a reduction in bit rate.
The compressed video bit stream is often converted to the reduced frame rate
video bit stream in order to reduce the bit rate. Video transcoding provides not only
the format conversion but also resolution scaling (spatial transcoding), bit-rate
conversion (quality transcoding), and frame rate conversion (temporal transcoding).
Because different networks may have different bandwidths, if a gateway or receiver
end can include a transcoder to adapt the video bit rates, video services can be
provided on different networks. When the bandwidth in a wireless network is very
limited, the quality transcoding can cause high degradation of the transcoded video
quality, if the frame rate is held constant.
The most straightforward way of implementation a transcoder is to cascade a
decoder and an encoder. The basic transcoding architecture is shown in Fig. 1.1. In
pixel domain, and the decoded video frames are then re-encoded at the desired output
bit rate. This technique, however, is computationally expensive. DCT-domain
transcoding [4] overcomes to some degree this computational complexity by decoding
the incoming bitstream into the intermediate discrete cosine transform (DCT) domain
and then re-encoding new bitstream from this DCT domain information.
Front Encoder
(Original Encoder at the transmitter end)
End Decoder (Decoder at the receiving end) Decoder (Incoming bitstream is decoded to either pixel or DCT domain) Encoder (Decoded bitstream is re-encoded to from the outgoing bitstream) Transcoder
Incoming
Bitstream Outgoing Bitstream
Fig. 1-1 Basic Transcoding Architecture
In both of above mentioned transcoding methods, bit rate reduction is primarily
achieved by re-encoding DCT coefficients using coarser quantization. This approach
suffers the following two problems. First, the quantization error would accumulate
due to different quantization levels used in the front encoder. This causes poor video
quality, especially for DCT-domain transcoding. Second, employing re-quantization
does not reduce the output bit rate significantly.
Frame skipping trasncoding [5][6] is often used to reduce the output bit rate by
skipping some of the incoming frames at regular or dynamic intervals while
maintaining sustainable image quality. When some incoming frames are dropped for
frame-rate conversions, the incoming motion vectors pointed to the dropped frames
become invalid in the transcoded bitstream. One of the most straightforward solutions
to overcome this problem is to re-estimate all the invalid motion vectors through
full-scale full search algorithm using the non-skipped frames as reference frames.
However, motion estimation is the most computationally expensive stage in the
decoded motion vectors from the incoming bitstream. Reuse of incoming motion
vector can be achieved by bilinear interpolation, forward dominant vector selection
(FDVS) [7], activity dominant vector selection (ADVS) [6], parametric activity
dominant vector selection (PADVS) [8] techniques, etc.
In this thesis, except the original FDVS, ADVS, and PADVS(n) are used on all
16x16 modes in H.264/AVC, the enhanced FDVS and ADVS methods we proposed
are also applied to all variable block sizes in H.264/AVC video coding standard.
The remaining of the paper is organized as follows. In section 2, we first
introduce the background of H.264/AVC video coding techniques, including some
H.264/ AVC important features and video transcoding technologies, and then some
related works about block mode decision and motion vector composition are
discussed. In section 3, the system architecture flow chart and the proposed method
are presented. The experimental results of the proposed methods are shown in section
Motivation
Due to requirement of many multimedia applications and expectation of good
quality of video under limited network transmission, the thesis is based on
H.264/AVC video coding standard and frame-rate conversion of video transcoding
technology. Macroblock mode decision methods and motion vector in position
methods are proposed. In the proposed methods, we make a choice about what
information we need to obtain from the compressed video stream in H.264/AVC
format and then re-use the information to decide the block mode types and the motion
vectors in the retained frame so that we can reduce transcoding time and gain the
acceptable video quality.
Besides, there are few topics discussing about how to decide block mode and
motion vector in H.264/AVC frame skipping. Most of existing methods are used to
resolve in MPEG-2 or H.263. Moreover, the distance between remaining frames
become estranged so that the motion vector referred to previous frame may become
invalid or imprecision and original macroblock modes may not suitable after frame
skipping. H.264/AVC provides variable block size and quarter pixel precision in
motion vector. The issues we are interested in are how to change block modes and
Chapter 2 Background and Related
Work
In this section, we will introduce the following video techniques sequentially
which we adopted. First, we will describe the H.264/AVC which is a video coding
standard. Then we will present some concepts in the video transcoding methods,
especially in frame skipping transcoding. Finally, some motion vector composition
methods will be described.
2.1 H.264/AVC
H.264/AVC is a standard for video compression. It is also known as MPEG-4
Part 10, or MPEG-4 AVC (for Advance Video Coding). It is one of the latest
block-oriented motion-estimation-based codecs developed by the ITU-T Video
Coding Experts Group (VCEG) and ISO/IEC Motion Picture Expert Group (MPEG),
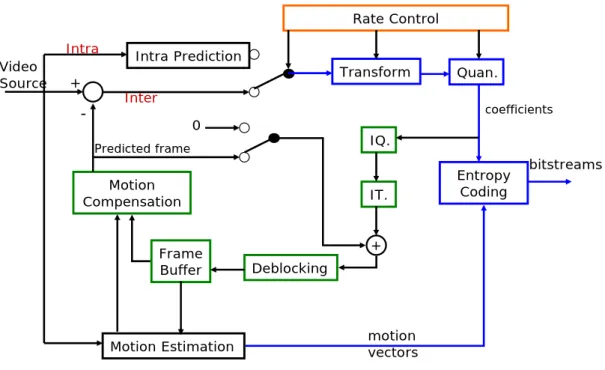
partnership known as the Joint Video Team (JVT). Fig. 2.1 shows the encoder of
Intra Prediction Motion Estimation Transform Quan. Rate Control Entropy Coding IQ. IT. Motion Compensation Frame Buffer Deblocking Intra Inter Video Source Predicted frame motion vectors coefficients bitstreams 0 + -+
Fig. 2-1 H.264/AVC Encoder
H.264/AVC contains a number of new features that allow it to compress video
much more effectively than older standards and to provide more flexibility for
application to wide variety network environments. There are several key features
including multiple reference frames, variable block size motion compensation to find
out accurate motion vectors, quarter pixel precision motion vectors, new transform
design features like integer 4x4 spatial block transform, in-loop deblocking filter
which helps prevent the block artifacts, entropy coding design such as context
adaptive binary arithmetic coding (CABAC) and context-adaptive variable length
coding (CAVLC) and so forth used for high compression performance compared to
previous video coding standards.
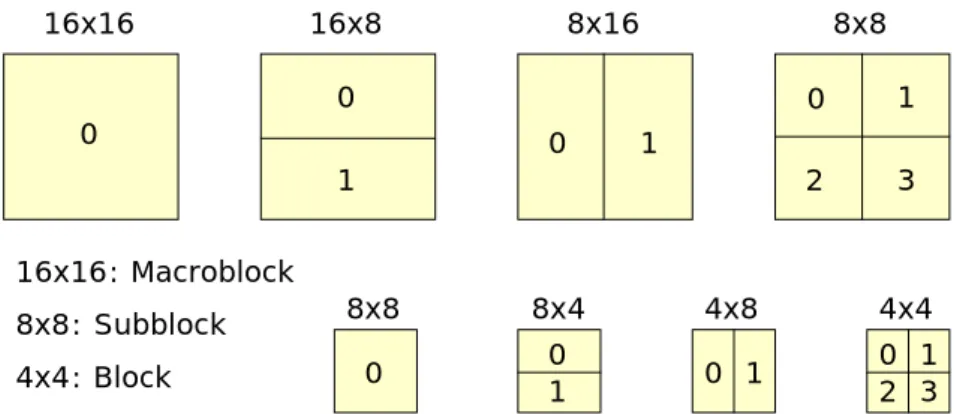
Among them, the inter mode decision process with variable block size motion
estimation part is the most complex and time consuming. The block sizes are 16x16,
16x8, 8x16, 8x8, 8x4, 4x8, and 4x4. Fig. 2.1 shows the possible macroblock modes.
Except the above seven kinds of mode, there are three more possible modes SKIP,
I4MB, and I16MB in inter frame coding. The SKIP mode is a direct copy from the
adjacent block size. In general, SKIP, 16x16, 16x8, and 8x16 are called large block
size modes, 8x8, 8x4, 4x8, and 4x4 are called small size block or sub block modes
(P8x8). 16x16 16x8 8x16 8x8 8x8 8x4 4x8 4x4 0 0 1 0 1 0 1 2 3 0 01 0 1 02 31 16x16: Macroblock 8x8: Subblock 4x4: Block
Fig. 2-2 Variable Block Size in H.264/AVC
To achieve the highest coding efficiency, the H.264/AVC reference software
encoder, JM [9], uses a non-normative technique called Lagrangian rate-distortion
optimization (RDO) technique to decide the block coding mode. Fig. 2.3 shows the
RDO process. In order to choose the best coding mode for a macroblock, H.264/AVC
encoder calculates the rate-distortion (RD) cost (RDcost) of every possible mode and
chooses the mode having the minimum value, and this process is repeatedly carried
out for all the possible modes for a given macroblock.
Encoding Transform / Quantization Variable Length Coding Inverse Transform / Inverse Quantization Compute RD cost Mode Selection Input
video Residual data
Distortion Rate
Fig. 2-3 Computation of RDcost
The best mode selected and used for coding must have the minimum cost. The
)
(
))
(
,
(
)
,
(
m
SAD
s
c
m
R
m
p
J
λ
motion=
+
λ
motion⋅
−
where is the current motion vector (MV), is the
predicted MV. represents the bits used to encode the MV information.
stands for the sum of absolute difference between current MB and
reference MB, where T y x
m
m
m
=
(
,
)
(
m
p
R
−
))
(
,
c
m
s
T y xp
p
p
=
(
,
)
)
(
SAD
s
represents reference macroblock and stands for a function of current macroblock with a parameter motion.)
(m
c
motion
λ
is the Lagrange multiplier, which is a function of QP,3 / ) 12 (
2
85
.
0
)
(
=
×
QP− motionQP
λ
From equation (1), we know that choosing a larger partition size means that
fewer bits are used to signal the MVs and other information, but the residue may
contain much higher energy, especially with more details. On the other hand, choosing
a smaller partition size may give a low residue after motion estimation but it needs to
use more bits to signal the MVs and other information. Therefore, the multiplier,
motion
λ
, can be considered as a trade-off parameter between the rate and distortion.In this case, if encoder pays one bit to reduce more than
λ
motion distortion in SAD,then less Lagrange cost,
J
(
m
,
λ
motion)
, is obtained. The optimal coding efficiencycan be achieved by checking all available modes and selecting the minimum cost. To
sum up, how to select the best mode is very important to get the best performance of
the H.264 codec.
2.2 Video Transcoding
information industry. Multimedia services and applications for a network environment,
such as videoconferencing, video streaming on web application, distance e-learning,
and video on demand, are widely used recently. With video being an important part of
multimedia communications, new video compression techniques like MPEG-2,
MPEG-4 and H.26x are proposed to satisfy new applications.
Transcoding is a process of converting a previously compressed video bitstream
into a lower bit-rate video bitstream. The main function of video transcoding is that it
can provide different format conversion, resolution scaling, bit-rate conversion, and
frame rate conversion. Format conversion, for example, from MPEG-2 as input video
stream converting to H.264/AVC as output video bitstream or from MPEG-4 to
H.264/AVC, transform from original high bit-rate or low video quality format to
superior video standard, low bit-rate or high video quality video format. Bit-rate
conversion uses different quantization parameter (QP) to control the video quality and
then obtain different bit-rate. Resolution scaling makes use of the video frame
up-sizing or down-sizing to attain higher or lower bit rate. Frame rate conversion by
means of skipping some frames regularly or dynamically to reduce the frame rate but
guarantee an acceptable video quality.
In general, there are two approaches for implementing transcoding, commonly
known as pixel-domain transcoding and discrete cosine transform (DCT) domain
transcoding. The basic component of transcoding has mentioned above in Fig. 1.1. In
pixel-domain transcoding, both of the incoming video bitstream and output of the
transcoded video bitstream are decoded/re-encoded in the pixel domain. This involves
high complexity, memory, and time consuming. Discrete cosine transform (DCT)
domain transcoding which the incoming video bitstream is partially decoded to form
the DCT coefficients and downscaled by the requantization of the DCT coefficients.
t
f
the coded domain where complete decoding and re-encoding are not required. The
problem with this approach is that the quantization errors will accumulate, and a
prediction memory mismatch at the decoder will cause poor video quality called
“drift” degradation.
In this thesis, we focus on frame skipping approach in the pixel domain because
it is a good strategy for controlling the bit-rate and maintaining the picture quality
within the acceptable level. The reason is that it is difficult to perform frame skipping
in the DCT-domain since the prediction errors of each frame are computed from its
immediate past frames. This means the incoming quantized DCT coefficients of the
residual signal are no longer valid because they refer to the frames which have been
dropped.
Frame skipping transcoding for bit-rate reduction of compressed video have been
researched in many literatures [10][11]. Fig. 2.4 shows the architecture of frame
skipping transcoder. In the front encoder, the motion vector, , for a macroblock
with pixels in frame , the current frame, is computed by searching for the
best matched macroblock within a search window in the previous reconstructed
frame, , and is obtained as follows:
t
mv
N
N
×
1 − tR
S
DCT Q1 IQ1 IDCT MC FB IQ1 IDCT FB MC DCT Q2 IQ2 IDCT MC FB (u,v) (u’,v’) IQ2 IDCT f FB MC (u’,v’) + + + + + + + + +Front Encoder Transcoder End DecoderReceiver
)
,
(
min
arg
)
,
(
) , (SAD
m
n
v
u
mv
S n m t t t=
=
∈∑∑
− = − = −+
+
−
=
1 0 1 0 1(
,
)
)
,
(
)
,
(
N i N j t ti
j
R
i
m
j
n
f
n
m
SAD
where m and n are the horizontal and vertical components of the displacement of a
matching macroblock, and represents a pixel in and ,
respectively.
) , ( ji
ft
R
t−1(
i
,
j
)
f
t Rt−12.3 Motion Vector Composition
In the transcoder, the optimized motion vectors (MVs) for the outgoing video
stream can be obtained by applying the full-scale full-search motion estimation.
However, the full-scale motion estimation for the Transcoder requires a high
computational complexity. Besides, in frame skipping transcoding, some incoming
frames are dropped, and the incoming motion vectors (MVs) are not valid because
they point to the dropped frames that do not exist. Generally, motion estimation has
not been computed again because of this high computational complexity. Furthermore,
using the extracted MVs from the incoming video stream for the outgoing video
stream would be almost as good as re-calculating the new motion estimation. The
re-use of MVs extracted from an incoming video bitstream during transcoding has
been widely adopted.
To find the MV for a macroblock in the current frame, a best matching
macroblock is searched within a predefined search window in the previous
reconstructed reference frame, as shown in Fig. 2.5. The MV is defined as the
motion estimation is performed on the luminance macroblocks and is usually based on
the sum of absolute differences (SAD) of the pixels in current video coding standards.
Previous reference frame Current frame Search window
Motion vector
Best match block
R (x, y) P (x, y)
Fig. 2-5 Block Matching Motion Estimation Algorithm
Re-use of incoming motion vector can be achieved by bilinear interpolation and
forward dominant vector selection (FDVS) [7]. In [12], bilinear interpolation is
defined as: 2 1
(
1
)
)
1
)(
1
(
MV
MV
MV
BI= −
α
−
β
+
α
−
β
4 3)
1
(
α
MV
αβ
MV
β
−
+
+
where , , , and are the motion vectors of the four
macroblocks overlapping the reference area in the skipped frame pointed by the
incoming motion vector. 1
MV
MV
2MV
3MV
4α
andβ
are determined by the horizontal and vertical pixel distance of this reference area from . Fig. 2.6 illustrates the interpolationof the motion vector.
1
MV
α
MV1 MV3 MV2 MV4 β Motion estimated MBFig. 2-6 Interpolation of Motion Vectors
skipped, is Motion Vector Composition (MVC) shown in Fig. 2.7. The goal of motion
vector composition scheme is to find a motion vector in the last skipped frame, to be
composed with the motion vector of the current frame, in order to obtain a motion
vector for the current frame that points to the last skipped frame. The advantage of
MVC is that, it is very easy to compute a motion vector for such macroblocks, given
that their reference area exactly overlaps a macroblock in the skipped frame.
F(n-2) F(n-1) F(n)
skipped
MVC
Fig. 2-7 Motion Vector Composition
Forward dominant vector selection (FDVS) [7] is used for composing the target
MV from the four MVs of the four neighboring macroblocks. Combine with the
concept of MVC mentioned above, as Fig. 2.8 shows, we assume that MV2 and MV3
represent the MV for the block in frame (n-1) and frame (n-2), respectively. Since
frame (n-1) is dropped, we need to find a MB pointing to a block in frame (n-2). A
feasible solution to generate a MV without performing motion estimation is to use the
vector sum of MV. However, there is no block on macroblock boundary actually.
Hence, MV2 is not available from the incoming video bitstream. The approach of
FDVS selects one dominant MV from the four neighboring macroblocks. A dominant
MV is defined as the MV carried by a dominant macroblock and the dominant
macroblock is a macroblock that has the largest overlapping area with the block
I1n-3 I 2n-3 I3n-3 I 4n-3 I1n-2 I 2n-2 I3n-2 I 4n-2 I1n-1 I 2n-1 I3n-1 I 4n-1 I1n I 2n I3n I 4n MV1 MV2 MV3 MVC 16 16 dropped dropped
Frame (n-3) Frame (n-2) Frame (n-1) Frame (n)
Fig. 2-8 Backward MV Composition: MVC = MV1+MV2+MV3
16 MV dropped dropped 1 MV2 MV3 16
Frame (n-3) Frame (n-2) Frame (n-1) Frame (n)
Fig. 2-9 FDVS Composition Scheme
The FDVS gets much better performance than the bilinear interpolation scheme,
and the bilinear interpolation for composition for MVs is with high computation.
Next, we introduce another algorithm that it also decides the dominant MV from
four neighboring macroblocks called activity dominant vector selection (ADVS) [6].
The conception of ADVS is the decided MV should be toward the MV with the larger
prediction error. To gain a measure of the prediction error directly from the existing
compressed bitstream, the DCT energy in the residual blocks is measured. ADVS
algorithm utilizes the activity of the macroblock to decide the choice of the MV. Here,
the activity information of a macroblock is represented by counting the number of
quantities are proportional to the spatial-activity measurement. As shown in Fig. 2-10,
the MV of the macroblock with the maximum NZ (number of nonzero quantized DCT
coefficients) is selected by the ADVS scheme as the dominant MV.
I11n-1I 12n-1I21n-1I22n-1 I13n-1I14n-1I 23n-1I24n-1 I31n-1I 32n-1I41n-1I42n-1 I33n-1I 34n-1I43n-1I44n-1 NZ (I1n-1) NZ (I 2n-1) NZ (I3n-1) NZ (I 4n-1) 16 16 8 8
Fig. 2-10 Illustration of the ADVS Algorithm
where
NZ
(
I
1n−1)
=
NZ
(
I
12n−1)
+
NZ
(
I
14n−1)
)
(
)
(
)
(
)
(
)
(
I
2n−1=
NZ
I
21n−1+
NZ
I
22n−1+
NZ
I
23n−1+
NZ
I
24n−1NZ
42 41 4 )) ( ) (I3n−1 =NZ I32n−1 NZ ) ( ) ( ) (I n−1 = NZ I n−1 +NZ I n−1 NZ : (.)NZ number of nonzero quantized DCT coefficients
The bigger the activity (NZ) of the macroblock, the more significant the motion of the
macroblock. Sine the quantized DCT coefficients of prediction errors are available in
the incoming stream of transcoder, the computation for counting the nonzero
Chapter 3 The Propose Method
In this chapter, we describe the proposed frame skipping transcoding algorithm
in detail. Section 3.1 includes the overall system architecture and the flowchart of the
proposed method. Section 3.2 focuses on how to select block mode type. Section 3.3
contains not only applying the original approaches like FDVS, ADVS, and PADVS(n)
to several macroblock types in H.264/AVC video frame skipping transcoding, but also
introducing our proposed algorithm suitable for all block mode types in H.264/AVC.
3.1 System Architecture
Figure 3.1 shows our H.264/AVC video frame skipping transcoding architecture.
The transcoding architecture includes a full H.264/AVC decoder and a H.264/AVC
transcoding encoder. Comparing Figure 2.4 to Figure 3.1, both the segments of the red
dotted line show the most important part in our transcoding architecture.
H.264 Decoder MV info. MB mode Coeff. H.264 video stream incoming stream Proposed MV Decision Proposed
Mode Decision modeMB M.E. Transform
Quan. Entropy Coding outgoing stream H.264 video stream Transcoding
Fig. 3-1 Proposed H.264/AVC video frame Skipping Transcoding Architecture
Both of input and output streams are H.264/AVC standard format, the main
operating units of transcoding architecture according to the chapter 1. We divide them
back-end decoder which have been shown in figure 1.1. Among them, front-end
decoder and back-end encoder are the focus of this thesis so they are depicted in
figure 3.1, where both the incoming stream and outgoing stream are in H.264/AVC
format.
In this architecture, when the H.264/AVC video stream has been decoded, we
would save some information including motion vectors, macroblock types, and
residual coefficients from the compressed video stream. And then in the H.264/AVC
transcoding part, we concentrate on mode decision and motion vector decision parts.
Other parts follow the standard H.264/AVC encoding procedures to produce the
stream. The propose mode decision uses the macroblock types and residual
coefficients obtained from incoming H.264/AVC compressed video stream while the
propose motion vector decision uses the motion vectors and macroblock types. Both
of the propose methods reuse the information from incoming video stream, so that we
can save a lot of time cost and computational complexity in doing motion estimation
and rate-distortion optimization, both of which take a great majority of time
consuming in the transcoding process.
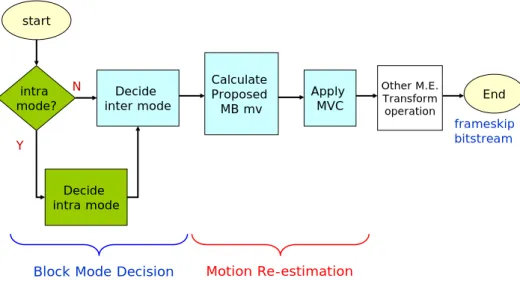
Figure 3.2 shows the flowchart of the proposed block mode decision and motion
vector decision methods. The first stage performs block mode decision which makes
the decision of the block mode. The second stage of the flowchart is to do the motion
start intra mode? Decide intra mode Decide inter mode Calculate Proposed MB mv Apply MVC frameskip bitstream N Y Other M.E. Transform operation End Motion Re-estimation Block Mode Decision
Fig. 3-2 Flowchart of Proposed Block Mode and MV Decision Methods
3.2 Proposed Block Mode Decision Method
In H.264/AVC video coding standard, it employs several different macroblock
mode types in intra and inter blocks. They are I16MB and I4MB in intra macroblocks,
and PSKIP, P16x16, P16x8, P8x16, SMB8x8, SMB8x4, SMB4x8 and SMB4x4 in
inter macroblocks, respectively. H.264/AVC standard software, JM, uses Lagrangian
rate-distortion optimization (RDO) technique to decide the block coding mode and
motion vector. However, the computation complexity of calculating Lagrangian
function for every block is quite high. Therefore, a fast block mode decision to
determine block mode is important.
Figure 3.3 shows the flowchart of the proposed block mode decision method,
where the input is a video stream including skipped frames and non-skipped frames.
The next paragraph would show how to do the block mode decision.
Let denote the current frame, and denote the corresponding
reference frame which will be dropped. The following steps are performed to
determine the mode for each macroblock in .
cur
f
f
skipcur
f
i cur
MB
the macroblocks as and , respectively. If anyone of and
is intra mode then intra mode is selected and rate-distortion optimization is
applied on to decide whether intra4x4 or intra16x16 to be used. However, if
none of and is intra mode, the mode-change rules in Table 3.1 are
applied to obtain a candidate block mode for . All these mode-change rules
follow the principle that the smaller block mode between and is
selected as the candidate mode. It is due to the fact that, after has beed
dropped, the sidtance between and its new reference frame increases, and
therefore, smaller block mode should be more suitable.
i skip
MB
curMB
i curMB
cur i skipMB
curMB
skip i curMB
i curMB
i skipMB
i i skipMB
if
f
In final step of the flowchart, we sub-divided the inter block with candidate
block mode into more blocks with smaller block modes in order to gain better visual
quality and lower rate-distortion cost. Figure 3.3 presentd four macroblocks as
examples. For the left-top macroblock, the candidate block mode resulting from mode
change step is P8x16 and will be sub-divided into SMB8x8 for rate-distortion cost
(RDcost) evaluation. If the resulting four 8x8 blocks get a better RDcost than the two
P8x16 blocks, the sub-division process repeat; otherwise, the block mode of P8x16 is
selected. For the left-down macroblock, the block P16x16 could be sub-divided into
two P8x16 blocks, or two P16x8 blocks as shown in the right side of the two arrows.
For each sub-division case, the RDcost is calculated, if it is smaller than the one
RDcost of the one without division, then we should adopt the divided one and the
dividing process repeat again. Otherwise, we stop dividing the inter block.
Divide inter block Divide inter block Mode change result
check 1
check 2
Fig. 3-3 Divide Inter Block
Rule 1 Select intra mode if it exists among co-located macroblock in the either current frame or previous frame
Rule 2 Select the smaller mode type between skipped and non-skipped frames Rule 2.1 Choose P16x16 if one of them is P16x16 or PSKIP and the
other is P16x16
Rule 2.2 Choose P16x8 if one of them is P16x16, P16x8, or PSKIP and the other is P16x8
Rule 2.3 Choose P8x16 if one of them is P16x16, P8x16, or PSKIP and the other is P8x16
Rule 2.4 Choose SMB8x8 if one of them is P16x16, P16x8, P8x16, PSKIP, or SMB8x8 and the other is SMB8x8
Rule 2.5 Choose SMB8x4 if one of them is P16x16, P16x8, P8x16, SMB8x8, or SMB8x4 and the other is SMB8x4
Rule 2.6 Choose SMB4x8 if one of them is P16x16, P16x8, P8x16, SMB8x8, or SMB4x8 and the other is SMB4x8
Rule 2.7 Choose SMB4x4 if one of them is P16x16, P16x8, P8x16, SMB8x8, SMB8x4, SMB4x8, or SMB4x4 and the other is SMB4x4
Rule 3 Special Case
Select SMB8x8 if one of them is P16x8 and the other is P8x16 Select SMB4x4 if one of them is SMB8x4 and the other is SMB4x8
Rule 4 Select SKIP mode only if both of skipped and non-skipped are SKIP modes
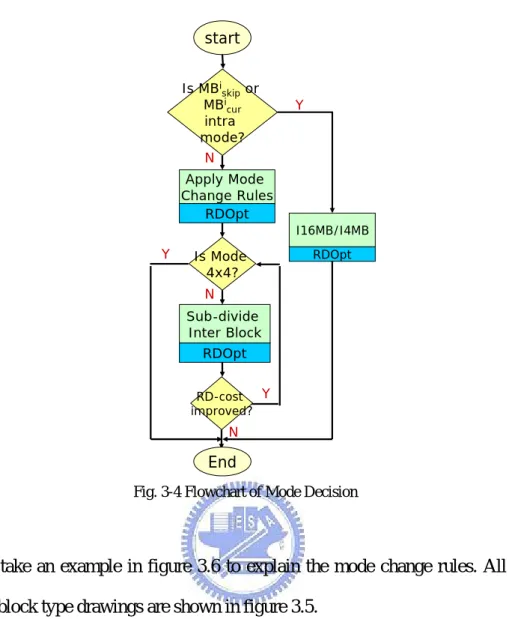
Is MBi skipor MBi cur intra mode? Y Apply Mode Change Rules N RD-cost improved? Sub-divide Inter Block N RDOpt Y I16MB/I4MB RDOpt start End RDOpt Is Mode 4x4? Y N
Fig. 3-4 Flowchart of Mode Decision
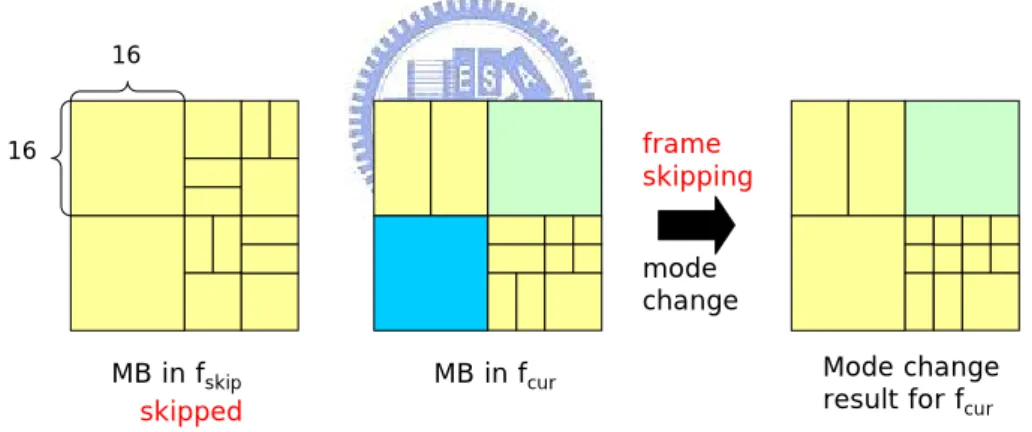
We take an example in figure 3.6 to explain the mode change rules. All of the
variable block type drawings are shown in figure 3.5.
P16x16 P16x8 P8x16 SMB8x8
SMB8x4 SMB4x8 SMB4x4 I16MB I4MB
PSKIP
Fig. 3-5 Variable Block Mode
In figure 3.6, is the current frame for mode decision and is the
corresponding reference frame that will be skipped after transcoding. To simplify the
illustration, each frame consists of four macroblocks.
cur
The block mode of upper-left macroblock is P16x16 in and P8x16 in
. Therefore, after applying mode change rule 2.2, the resulting block mode for
should be P8x16. As for block mode decision of upper-right and lower-left
macroblocks, the resulting modes should be intra16x16 and P16x16, respectively, due
to rule 1 and rule 2.1. The final part of the example is more complicated and it
contains four sub-macroblocks. The upper-left sub-macroblock is SMB4x8 in
and SMB8x4 in , so after applying rule 3, the resulting block mode should be
SMB4x4. Similar processes are performed for all the other three sub-macroblocks,
and the resulting sub-block modes are shown in the right hand side of figure 3.6.
skip
f
curf
skipf
skipf
curf
16 16 MB in fskip MB in fcur frame skipping mode change Mode change result for fcur skippedFig. 3-6 Mode Change Result
3.3 Proposed Motion Vector Composition Method
Motion estimation is also an important segment in video frame skipping
transcoding. In this section, we discuss about how to employ the motion re-estimation
by using the motion vectors obtained from front-end transcoder. An enhanced FDVS
3.3.1 Enhanced FDVS Method for H.264/AVC
The enhanced FDVS method mentioned in this section is suitable for all kinds of
mode including variable block size of inter, intra, and SKIP mode. Owing to the
fundamental conception of implementing FDVS method is to find out macroblcok
that has the largest area overlapped with the area pointed by the motion vector of
current macroblock as dominant macroblock, and then use the motion vector of the
dominant macroblock as dominant motion vector. However, there exist two problems
if we directly apply the FDVS idea to H.264/AVC video coding. Firstly, finding the
largest overlapping area in the variable block size in H.264/AVC is much complicated
due to the quarter-pixel precision and complex combinations of various block modes.
Secondly, the dominant macroblock may be the smallest block size such as SMB4x4.
Therefore, in some cases, the results of motion vector selected by original FDVS and
by enhanced FDVS method may be different. The reasons will be explained in this
section by examples.
For above reasons, we suggest another flexible manner to prevent from the
foregoing conditions. We divide all inter block modes into different numbers of inter
4x4 FDVS unit, as shown in figure 3.7. For instances, a P16x16, P16x8, SMB8x8,
and SMB4x4 blocks would be divided into sixteen, eight, four, and one 4x4 FDVS
units, respectively.
4 4 current mv
Fig. 3-7 An Inter 4x4 FDVS Unit
The center of each FDVS unit can be found out. The center position is marked as
each 4x4 FDVS unit, we add up center location and current motion vector. The
motion vector of macroblock which is pointed to is one of the candidate motion
vectors. The program takes down all candidate motion vectors, and looks for the
motion vector appearing most frequently as the dominant motion vector. Take an
example, suppose four candidate motion vector of a SMB8x8 macroblock are (1, 0),
(0, 1), (2, 0), and (1, 0). The candidate motion vector of (1, 0) appears twice so that it
becomes the most frequent candidate motion vector. And then (1, 0) would be the
dominant motion vector of the SMB8x8 macroblock. The results of using center point
methods can save a lot of time without calculating the overlapped area.
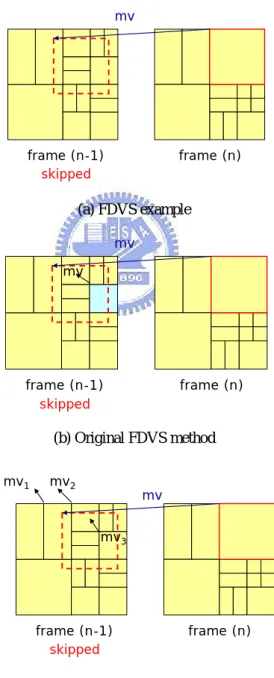
Take an example in figure 3.8 to explain the difference between original FDVS
method and enhanced FDVS method. We focus on the upper-right part of P16x16
macroblock in frame (n). Figure 3.8 describes that after adding the current motion
vector, P16x16 refers to the red dotted line in the frame (n-1). The macroblock type
under the red dotted line contains a P8x16, a P16x16, two SMB8x8, two SMB8x4,
and four SMB4x8. If we choose the original FDVS method, we have to pick up the
largest overlapped area referenced in the frame (n-1). For an instance, suppose the
largest overlapped area is SMB8x8 located at the lower-right partition, as figure 3.8 (b)
shows. The blue area of SMB8x8 block is selected by original FDVS method which it
contains the largest partition. In our propose method, enhanced FDVS method, we not
only check all the center points that current macroblock refers to, but also accumulate
the same length of motion vectors. As figure 3.8 (c) shows, assume that the length of
three motion vectors , , and are (2, 1), (2,1), and (1,1). If the
macroblocks of and contain two 4x4 FDVS units while the macroblock
of contains three 4x4 FDVS units. However, the length of and is
the same so that we accumulate the same length of motion vector even if they belong 1
mv
mv
2 2mv
3mv
1mv
3mv
mv
1mv
2to different macroblocks.
Hence, we select as dominant motion vector if we use original FDVS
method, while we will choose or as dominant motion vector if we use
our propose enhanced FDVS method. The main difference between original FDVS
and enhanced FDVS is that our propose method selects the motion vector which
appears most frequently. 3
mv
1mv
mv
2 mv frame (n-1) frame (n) skipped (a) FDVS example mv frame (n-1) mv frame (n) skipped (b) Original FDVS method frame (n-1) skipped frame (n) mv mv1 mv2 mv3 (c) Enhanced FDVS methodFig. 3-8 (a) FDVS example (b) Original FDVS method (c) Enhanced FDVS method
macroblock, the dominant motion vector selected by the proposed enhanced FDVS is
different from that selected by original FDVS. Now assume the mode change step
determines to use 8x8 block mode (instead of 16x16) for current macroblock.
As the figure 3.9 shows, P16x16 macroblock should be divided according to the
block mode decision. Each 8x8 block then is sub-divided into 4x4 FDVS units which
are mapping to the reference frame (n-1). On frame (n-1) it shows that the upper-left
SMB8x8 is overlapped with a 8x16 bocks with , a 8x8 block with , and a
8x4 block with , respectively. Since there are two central points of FDVS units
located in the block with , and only one in and , the dominant
motion vector is set to .
1
mv
mv
2 3mv
1mv
1 2mv
mv
3mv
mv Mode Decision mv1 mv2 frame (n-1) P16x16 mv3 16 16 skippedFig. 3-9 Enhanced FDVS Example Result
3.3.2 Enhanced ADVS Method for H.264/AVC
Another proposed method, enhanced ADVS, is derived from the conception of
ADVS is to accumulate each non-zero quantized coefficients of block covered in.
Unlike the way applying ADVS to all 16x16 modes, applying ADVS to all kinds of
block modes produce some different issues. As figure 3.10 shows an 4x4 inter ADVS
unit. Other kinds of macroblock types are based on the 4x4 inter ADVS unit and
divided into several ADVS units. As we can see in figure 3.11 illustrates SMB8x4,
SMB4x8, and SMB8x8 block type divided into ADVS units.
4 4 current mv
Fig. 3-10 An 4x4 Inter ADVS Unit
We propose to check the endpoints of ADVS unit point to the location after
adding the current motion vector. The endpoints are labeled as small blue circles as in
the figure 3.10 and 3.11. Each 4x4 inter ADVS unit would have four endpoints.
Similarly, there are six endpoints in a SMBx4 or SMB4x8 block, nine endpoints in a
SMB8x8 block, fifteen endpoints in a P16x8 or P8x16 block, and twenty-five
endpoints in a P16x16 block. current mv 8 4 8 4 current mv 8 8 current mv
Fig. 3-11 SMB8x4, SMB4x8, SMB8x8 Check Endpoint
As figure 3.12 shows, we explain the overall process by an example. Suppose
current macroblock is a P16x16 block mode. After applying mode decision as before,
and map them to the previous frame (n-1). For the left-top SMB8x8 block, there are
three endpoints locating at the P8x16 with in the previous frame (n-1) we have
to calculate its non-zero quantized coefficients. Four endpoints are located at the
SMB8x8 with in the previous frame and we have to count its non-zero
quantized coefficients. The remaining two endpoints are located at the SMB8x4 we
also calculate its nonzero quantized coefficients. By comparing the NZ(.) results of
three different groups, presume that the one with maximum of non-zero quantized
coefficients is the block SMB8x8 with , then we would consider the motion
vector as our dominant motion vector. 1
mv
2mv
2mv
2mv
mv Mode Decision mv1 mv2 frame (n-1) P16x16 mv3 4x4 NZ unit skippedFig. 3-12 Apply ADVS Example
3.4 MV Selections for Mode Change and No Mode Change
In this section, we probe the effectiveness of the mode change. For comparison,
figure 3.13 (a) illustrates the case with mode change, while figure 3.13 (b) shows the
and the co-located macroblock in the reference frame (n-1) is composed of four
SMB8x8. After doing the proposed mode change method as well as enhanced FDVS
or enhanced ADVS, the outcome would be four SMB8x8 block modes with different
motion vectors. Oppositely, if we have the same block mode without using mode
change, we would retain the block mode of non-skipped frame with a determined
motion vector as illustrated in the figure 3.13 (b).
frame (n-1) frame (n) skipped mv mode change frame (n/2) frame skipping mv1 mv2 mv3 mv 4
(a) mode change
frame (n-1)
’
skipped frame (n) mv mv frame skipping frame (n/2) (b) no mode changeFig. 3-13 MV selections for (a) mode change and (b) no mode change
The experimental results of the mode change and no mode change will exhibit in
the chapter 4.
3.5 Apply Motion Vector Composition
No matter enhanced FDVS or enhanced ADVS is adopt to obtain the dominant
The typical strategy we use for motion vectors computation when a frame is skipped,
is called motion vector composition (MVC) shown in figure 3.14. The goal of motion
vector composition scheme is to compose the dominant motion vector in the
skipped frame with the motion vector of the current frame in order to obtain a motion
vector for the current frame that points to the previous non-skipped frame which is
used as the new reference frame.
MVC current mv by propose method Dominant mv: F(n-2) F(n-1) F(n) skipped
Fig. 3-14 Apply Motion Vector Composition
The benefit of MVC is that, to compute a motion vector for such
macroblock is simpler because it effectively reuses the information from the encoded
Chapter 4 Experimental Results
In this chapter, we compare the proposed methods with the general FDVS [7],
ADVS [6], and PADVS [8] algorithms, which speed up the motion vector
composition, respectively. We also compare the proposed transcoder with the optimal
frame skipping method proposed in H.264/AVC JM13.2 reference software. Various
types of standard test sequences with CIF (352x288) format are tested.
The proposed transcoder is implemented by using the H.264/AVC JM13.2
reference software. The parameters of our experimental environments are set as
following:
Hardware Parameters:
CPU: Intel Pentium Core 2 Due 1.83GHz, 1.83GHz
RAM: 2.00 GB
Software Parameters:
Test sequences: Foreman, Football, Tennis, Stefan, bus, Container, Hall
Frame Format: CIF (352x288 pixels)
Group of Picture (GOP): I P P P P …, and the period of I-frame is 30.
Frame Rate: 30 fps
Number of reference frame: 1
Motion Estimation: Search window size = 32, fast full search
R-D Optimization: High complexity mode
Inter Mode: All mode are enabled
Intra Mode: I16MB and I4MB enabled
We conducted experiments of different methods in this section. First, we applied
which only use P16x16, PSKIP, and I16MB macroblock type. The reason is that all of
three methods are used in MPEG-2 video coding standard originally.
Second, we separate our proposed method, mode decision and motion vector
composition, into two cases. One is with motion vector composition with mode
decision and the other is without mode decision. The destination is to observe the
influence on mode decision.
Finally, we would compare our proposed method with JM 13.2 reference
software, FDVS, ADVS, and PADVS(n).
4.1 FDVS, ADVS, and PADVS(n) Methods on Large Block Sizes
Several sequences tested in this section would show that the methods of FDVS,
ADVS, and PADVS(n) save a lot of time of transcoding and motion estimation with
acceptable degradation of video quality and slightly increase in bit-rate. The definition
of large block size is block type of P16x16, PSKIP, and intra16x16MB. The test
sequences are foreman, news, hall, football, and flower, where news and hall are
classified as slow or smooth motion sequences, foreman and flower are median
motion, and football is high motion. The parameter n in the PADVS(n) method is
established as n=1, 3, 10, 36, and 49 that covered, where the non-zero quantized
coefficients are selected in a zig-zag scan order from low frequency to high frequency.
The numbers of frame sequences before and after frame skipping transcoding are 120
and 60, respectively. For the sequence, one frame is skipped for every two frames.
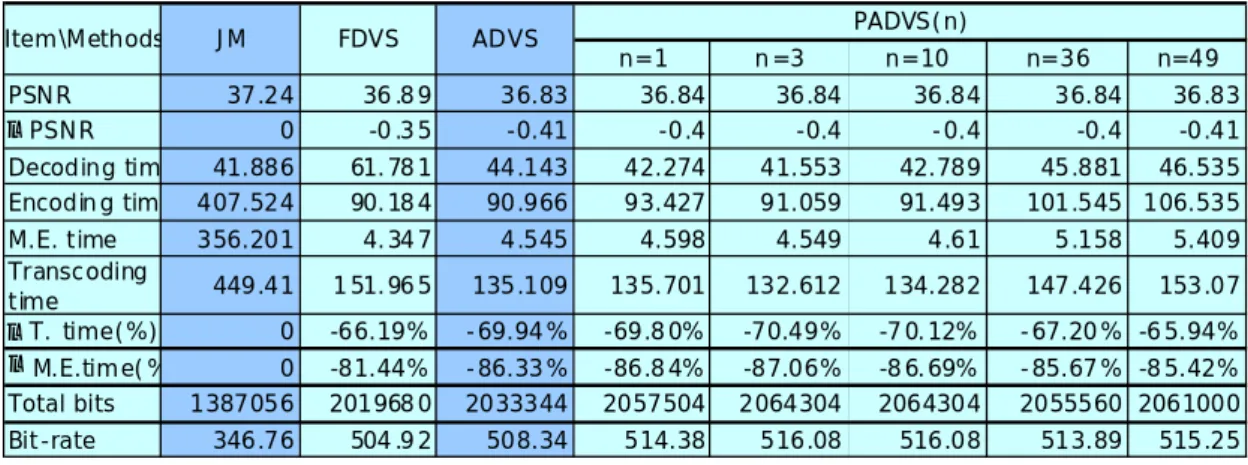
Table 4.1 describes the results of JM, FDVS, ADVS, and PADVS(n) methods
applying to “foreman” on large block size. The experimental results show that
comparing to reference software JM, the methods of FDVS, ADVS, and PADVS(n)
decrease 0.35dB to 0.41dB in PSNR measurement while saving about 65% to 70% in
n=1 n =3 n=10 n=36 n=49 PSNR 37.24 36 .8 9 36.83 36.84 36.84 36.84 36.84 36.83 △PSNR 0 -0 .3 5 -0.41 -0.4 -0.4 -0.4 -0.4 -0. Decoding tim 41.886 61.78 1 44.143 42.274 41.553 42.789 45.881 46.535 Encodin g tim 407.524 90.18 4 90.966 93.427 91.059 91.493 101.545 106.535 M.E. time 356.201 4.34 7 4.545 4.598 4.549 4.61 5.158 5.409 Transcoding time 449.41 1 51.96 5 135.109 135.701 132.612 134.282 147.426 153.07 △T. time(%) 0 -66.19% -69.94% -69.8 0% -70.49% -7 0.12% -67.20% -6 5.94% △M.E.time( 41 % 0 -81.44% -86.33% -86.8 4% -87.06% -8 6.69% -85.67% -8 5.42% Total bits 1387056 201968 0 2033344 2057504 2064304 2064304 2055560 2061000 Bit-rate 346.76 504 .9 2 508.34 514.38 516.08 516.08 513.89 515.25 PADVS(n) FDVS ADVS Item\Methods JM
Table 4-1 Experimental results of FDVS, ADVS and PADVS(n) on foreman.cif
Here we define some terms such as
Δ
PSNR
,Δ
T .
time
, and as followings:time
E
M
.
.
Δ
JM PSNR method PSNR PSNR =Δ _ −Δ _ Δ△ PSNR means the degradation of PSNR compared with the full H.264/AVC
re-encoder.
time
T .
Δ
: stands for the percentage of reduced processing time comparing with the H.264/AVC re-encoder. The formula is listed as below:JM Time JM Time method Time time Total _ =( _ _ )/ _ Δ −
time
E
M
.
.
Δ
: stands for the percentage of reduced motion estimation time comparing with the H.264/AVC re-encoder. M.E. is the abbreviation of motionestimation. JM E M JM E M method E M time E M. . =( . _ − . ._ )/ . ._ Δ
where the “method” in above formula could be FDVS, ADVS, or PADVS (n). Notice
that the definition of transcoding time is the summation of decoding time and
encoding time. From Table 4.1, the experimental results show that the visual quality
of FDVS, ADVS, and PADVS(n) are close to JM in PSNR measurement. However,
due to only using large block size, some proportions of macroblocks are encoded as
Therefore, the bit-rates increase when using FDVS, ADVS, and PADVS(n) methods.
The phenomenon can be solved if we use all block modes to encode the macroblocks.
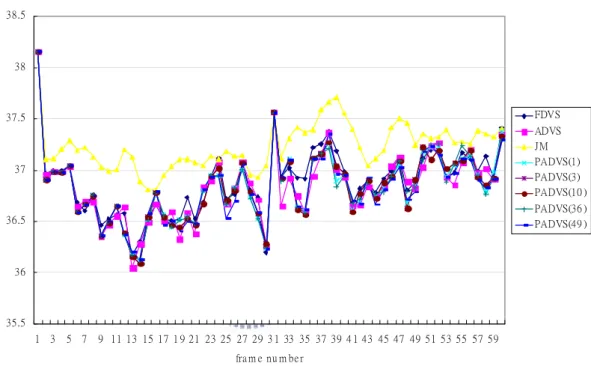
Figure 4.1 shows the PSNR measurement frame by frame in foreman sequence.
The yellow curve is the result of conducting by JM while the blue and pink curves are
representation of FDVS and ADVS.
35.5 36 36.5 37 37.5 38 38.5 1 3 5 7 9 11 13 15 17 1 9 21 23 25 27 29 3 1 33 35 37 39 4 1 43 45 47 49 51 53 55 57 59 fra m e nu m be r PS N R FDVS ADVS JM PADVS(1) PADVS(3) PADVS(10 ) PADVS(36 ) PADVS(49 )
Fig. 4-1 Different Methods in PSNR Frame by Frame in Foreman
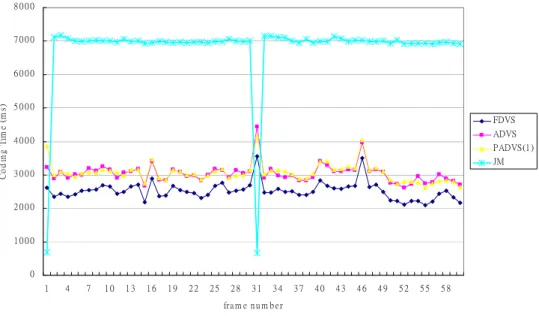
Figure 4.2 illustrates the comparison in encoding time and transcoding time in
the same test sequence frame by frame. The definition of transcoding here means the
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 6 0 0 0 7 0 0 0 8 0 0 0 1 4 7 1 0 1 3 1 6 1 9 2 2 2 5 2 8 3 1 3 4 3 7 4 0 4 3 4 6 4 9 5 2 5 5 5 8 fra m e n u m b e r Co d in g T im e ( m s) FDVS ADVS PADVS(1 ) JM
Fig. 4-2 Comparison Encoding Time with Transcoding Time Frame by Frame in Foreman
In figure 4.2, the intra periodic is set up as 30. Therefore, JM does not have to
decide the macroblock is intra or inter when encoding each I-frame. The encoding
time displays a period of declination every thirty frames. In our frame skipping
transcoding methods, we do not consider about I-frame or P-frame from the video
source but performing the mode change and motion re-estimation every two frames.
Hence, the transcoding time rises every fifteen frames.
The sequence, foreman, represents the case of median to high motion one. In
Appendix C, we will take other experimental sequences such as “news”, “hall”,
“football”, and “flower” to show our experimental results.
4.2 Propose Methods on All Block Sizes
In this section, we use the same video test sequences as input mentioned in the
section 4.3.1. Here, we focus on the experimental results of enhanced FDVS and
apply ADVS on all block size that the methods including block mode decision and
motion vector decision we proposed in the chapter 3. The term, all block sizes, means
SMB4x4, Intra16MB, and Intra4x4MB.
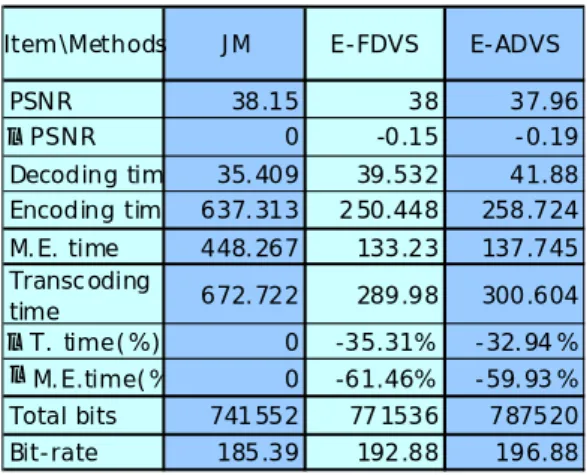
Table 4.2 to Table 4.4 illustrates the propose methods comparing to the reference
software JM. The term, transcoding time stands for the summation of the decoding
time and encoding time. The formulas of other terms are listed above in the section
4.3.1. PSNR 37.37 37.28 37.24 △PSNR 0 -0.09 -0.13 Decoding tim 40.612 46.593 56.251 Encoding tim 667.942 287.41 287.41 M.E. time 466.319 167.27 171.3 Transcoding time 708.554 334.003 343.661 △T. time(%) 0 -52.86% -51.50% △M.E.time(% 0 -64.13% -63.27% Total bits 1110216 1122888 1145720 Bit-rate 277.55 280.72 286.43 E-FDVS E-ADVS JM Item\Methods
Table 4-2 Propose Methods Comparing to H.264 (foreman)
PSNR 38.77 38.49 38.44 △PSNR 0 -0.28 -0.33 Decoding tim 35.88 39.36 42.28 Encoding tim 638.815 257.471 262.821 M.E. time 450.187 131.57 134.301 Transcoding time 674.695 296.831 305.101 △T. time(%) 0 -56.01% -54.78% △M.E.time(% 0 -62.03% -60.78% Total bits 715416 912328 925120 Bit-rate 178.25 228.08 231.28 E-FDVS E-ADVS Item\Methods JM
Table 4-3 Propose Methods Comparing to H.264 (news)
PSNR 38.15 38 37.96 △PSNR 0 -0.15 -0.19 Decoding tim 35.409 39.532 41.88 Encoding tim 637.313 250.448 258.724 M.E. time 448.267 133.23 137.745 Transcoding time 672.722 289.98 300.604 △T. time(%) 0 -35.31% -32.94% △M.E.time(% 0 -61.46% -59.93% Total bits 741552 77 1536 787520 Bit-rate 185.39 192.88 196.88
Item\Methods JM E-FDVS E-ADVS
Table 4-4 Propose Methods Comparing to H.264 (hall)
method only decreases 0.09dB to 0.28dB in PSNR measurement while saving around
35% to 56% in total time and 61% to 64% in motion estimation time. Enhanced
ADVS method decreases 0.19dB to 0.33dB in PSNR measurement while saving about
33% to 54% in total time and 60% to 63% in motion estimation time. The results
improve 0.15dB and 0.2dB comparing to large block size when using FDVS and
ADVS methods mentioned in the section 4.3.1. Table 4.5 shows the results of
comparing to the terms in bit-rate.
method\Item PSNR Total bits Bit-rate
JM 37.37 1110216 277.55 E-FDVS 37.28 1122888 280.72 E-ADVS 37.24 1145720 286.43 JM 38.77 715416 178.25 E-FDVS 38.49 912328 228.08 E-ADVS 38.44 925120 231.28 JM 38.15 741552 185.39 E-FDVS 38.00 771536 192.88 E-ADVS 37.96 787520 196.88 JM 35.32 4910904 1227.73 E-FDVS 35.26 6259720 1564.23 E-ADVS 35.18 6240010 1560.42 foreman news hall football
Table 4-5 Bit-rate of Propose Methods Comparing to H.264
Both of our propose methods, enhanced FDVS and enhanced ADVS, save a lot
of bit-rate. This is because our propose methods do the operating of mode change and
sub-division inter block to check whether the block need to be divided or not in aspect
of RDcost. When we select the smaller inter block instead of choosing intra block, we
have larger chance to save more bit-rate.
Figure 4.3 to figure 4.5 illustrate the bit-rate of different methods including JM
on all modes, E-FDVS, E-ADVS, JM on large block size, FDVS, and ADVS in
“foreman”, “news”, and “hall”. The figure shows that our propose methods are close
0 1 00 2 00 3 00 4 00 5 00 6 00 JM E-FDVS E- AD VS JM o n 1 6x1 6 FD VS o n 16 x16 ADVS o n 1 6x1 6 M et h o d s Bi t-ra te
Fig. 4-3 Bit-rate of Different Methods in Foreman
0 50 100 150 200 250 300 JM E- FD VS E-ADVS JM on 1 6x16 FDVS on 16 x1 6 ADVS on 1 6x1 6 M et ho d s Bi t-ra te
Fig. 4-4 Bit-rate of Different Methods in News
0 1 00 2 00 3 00 4 00 5 00 6 00 JM E- FDVS E-ADVS JM on 16x16 FDVS on 16x16 ADVS o n 1 6x16 M et h o ds Bi t-ra te
4.3 MV Selections for Mode Change and No Mode Change
In this thesis, we also curious about the effectiveness of the mode decision when
we adopt the mode change in our propose mode decision flowchart or not. The
quantity result of motion vector would change along with different block mode
outcome. The procedure of how to do mode change and no mode change has brought
up in the section 3.4.
Table 4.6 to Table 4.8 show the experimental results of mode change and no
mode change.
PSNR 37.37 37.28 37.18
△PSNR 0 -0.09 -0.19
Decod ing time 40.612 46.593 48.874 Encoding time 667.942 287.41 311.485 M.E. time 466.319 167.27 6.805 Transcoding time 708.554 334.003 360.359 △T. time(%) 0 -52.86% -49.14% △M.E.time(%) 0 -64.13% -98.54% Total bits 1110216 1122888 2535128 Bit-rate 277.55 280.72 633.78
Item\Methods JM E-FDVS no modechange
Table 4-6 Comparing Mode Change with No Mode Change in foreman
PSNR 38.77 38.49 38.37 △PSN R 0 -0.28 -0.4 Decoding time 35.88 39.36 41.504 Encoding time 638.815 257.471 272.035 M.E. time 450.187 131.57 2.108 Transcoding time 674.695 296.831 313.539 △T. time(%) 0 -56.01% -53.53% △M.E.time(%) 0 -62.03% -90.31% Total bits 715416 912328 1256216 Bit-rate 178.25 228.08 314.05
Item\Methods JM E-FDVS no mode
change
PSNR 38.15 38 37.91 △PSNR 0 -0.15 -0.24 Decoding time 35.409 39.532 42.421 Encoding time 637.313 250.448 265.067 M.E. time 448.267 133.23 4.089 Transcoding time 672.722 289.98 307.488 △T. time(%) 0 -35.31% -31.41% △M.E.time(%) 0 -61.46% -89.62% Total bits 741552 771536 985032 Bit-rate 185.39 192.88 246.26 E-FDVS
Item\Methods JM no modechage
Table 4-8 Comparing Mode Change with No Mode Change in hall
Although the method of no mode change saves more time, it also increases the
bit-rate. The experimental results show that the effectiveness of mode change
improves 0.09dB to 0.12dB in PSNR measurement when comparing to no mode
change. Therefore, it is worthy of operating mode change to reduce bit-rate and
Chapter 5 Conclusion
An efficient frame skipping transcoding from H.264/AVC to H.264/AVC
including mode decision and motion vector decision methods had been proposed. In
our propose methods, we obtain some information from the compressed video stream
in H.264/AVC and then reuse them to decide the block mode types and motion
vectors in the retained frame.
Our propose methods save more than 50% transcoding time and visual quality
only reduced less than 0.2dB in most of the test sequences when comparing with
H.264/AVC. Simulation results show that when comparing with all 16x16 mode, the
propose methods improve the 0.2~0.3dB in PSNR measurement and reduce a lot of
bit-rate. Besides, the experimental results also show that our propose methods
improve about 0.1dB in average while comparing with no mode change. In future, we
consider skipping not only one frame to make more decision about the block mode
Reference
[1] Draft ITU-T Recommendation and Final Draft International Standard of Joint Video Specification (ITU-T Rec. H.264-ISO/IEC 14496-10AVC), JVT-G050, Joint Video Team (JVT) of ISO/IEC MPEG and ITU-T VCEG, May 2003.
[2] G. Keesman, R. Hellinghuizen, F. Hocksema, and G. Heideman, “Transcoding of MPEG-2 bitstreams,” Signal Processing: Image Comm., vol. 9, pp. 481-500, 1996.
[3] N. Bjork and C. Chistopolous, “Transcoder architecture for video coding,” IEEE Trans. Consumer Electron., vol. 44, pp. 88-98, Feb. 1998.
[4] Chia-Wen Lin, Yuh-Reuy Lee, “Fast algorithms for DCT-domain video transcoding,” Proc. IEEE Int. Conf. Image Processing, vol. 1, pp. 421-424, Oct. 2001.
[5] Kai-Tat Fung, Yui-Lam Chan, Wan-Chi Siu, “A new architecture for dynamic frame skipping transcoder,” IEEE Trans. On Image Processing, vol. 11, pp. 886-900, Aug. 2002.
[6] Mei-Juan Chen, Ming-Chung Chu, Chih-Wei Pan, “Efficient motion-estimation algorithm for reduced frame-rate video transcoder,” IEEE Trans. Circuits Syst. Video Technol., vol. 12, pp. 269-275, Apr. 2002.
[7] J. Youn, M. –T. Sun, and C. –W. Lin, “Motion vector refinement for high performance transcoding,” IEEE Trans. Multimedia, vol. 1, pp. 30-40, Mar. 1999.
[8] Yusuf A. A., Murshed M. and Dooley L. S., “An Adaptive Motion Vector Composition Algorithm for Frame Skipping Video Transcoding,” IEEE Electrotechnical Conference, vol. 1, pp. 235-238, May. 2004.
[9] Joint Video Team, “Reference software JM13.2,” http://iphome.hhi.de/seuhring/tmldowload.
[10] Feng Pan, Z. P. Lin, and X. Lin, “Content adaptive frame skipping for low bit rate video coding,” ICICS-PCM, pp. 15-18, December 2003.
[11] F. Lonetti and F. Martelli, “Motion vector composition algorithm in H.264 transcoding,” 6th EURASIP Conference focused on Speech and Image Processing. 14th International Workshop, pp. 401-404, June 2007.
[12] J.N. Hwang, T.D. Wu, C.W. Lin, “Dynamic frame-skipping in video transcoding,” Proceedings of 2nd Workshop on Multimedia Signal Processing, pp. 616-621d, December 1998.
Appendix A
Block Mode Type Observation
In this section, we observed about the block mode type relations between current
frame and previous frame. Here, we abided by the relative macroblock location set up
by the JM reference software—X, A, and B, as Fig. A.1 shows:
X A
B
Previous Frame Current Frame
Encoded MB
Unencoded MB
Current MB
Fig. A.1 Macroblock relative location: X, A, and B
where X, A, and B represent the co-located, left, and up macroblock in the previous
frame, respectively. Here we conducted different CIF sequences with 100 frame
numbers per test sequence as inputs. The test sequences are Foreman, Football, Tennis,
Stefan, Bus, Container, and Hall. Each kind of macroblock type, PSKIP, P16x16,
P16x8, P8x16, SMB8x8, SMB8x4, SMB4x8, SMB4x4, Intra16x16, and Intra4x4,
would be checked. Fig. A.2 exhibits each test sequence with 100 frames that contains
0 % 1 0 % 2 0 % 3 0 % 4 0 % 5 0 % 6 0 % 7 0 % fo re m a n fo o tb a ll te n n is st e fa n Se q u e n ce Nu m b e r PSKIP P1 6 x1 6 P1 6 x8 P8 x1 6 SM B8 x8 SM B8 x4 SM B4 x8 SM B4 x4 I1 6 M B I4 M B 0 % 1 0 % 2 0 % 3 0 % 4 0 % 5 0 % 6 0 % 7 0 % b u s co n t a in e r h a ll Se q u e n ce Nu m b e r PSKIP P1 6 x1 6 P1 6 x8 P8 x1 6 SM B8 x8 SM B8 x4 SM B4 x8 SM B4 x4 I1 6 M B I4 M B
Fig. A.2 Statistic different MB types of each 100 test sequences in percentage (%)
Here, we divided different kinds of macroblock types into three parts. The first
part is large macroblock type which includes PSKIP, P16x16, P16x8, and P8x16. The
second part is called small macroblock type which contains from SMB8x8, SMB8x4,
SMB4x8, and SMB4x4. The final part is intra macroblock type that comprises