國
立
交
通
大
學
多媒體工程研究所
碩
士
論
文
應用基於消失點之影像校正於強健式人臉偵測
Vanishing Point-Based Image Rectification for Robust Face Detection
研 究 生:王靖賀
指導教授:莊仁輝 教授
應用基於消失點之影像校正於強健式人臉偵測
Vanishing Point-Based Image Rectification for Robust Face Detection
研 究 生:王靖賀 Student:Ching-Ho Wang
指導教授:莊仁輝 Advisor:Jen-Hui Chuang
國 立 交 通 大 學
多 媒 體 工 程 研 究 所
碩 士 論 文
A ThesisSubmitted to Institute of MultimediaEngineering
College of Computer Science
National Chiao Tung University
in partial Fulfillment of the Requirements
for the Degree of
Master
in
Computer Science
July 2013
Hsinchu, Taiwan, Republic of China
i
應用基於消失點之影像校正
於強健式人臉偵測
學生:王靖賀 指導教授:莊仁輝 博士
國立交通大學
多媒體工程研究所碩士班
摘 要
我們提出一種新的基於消失點影像校正方法以提高一般監控式系統性能,雖然大多 數現有的人臉資料庫和偵測技術都是基於相機和人臉在同個高度上的假設,但在實際狀 況下,相機很有可能會被安裝在不同的高度上,因此這種差異通常會降低基於正面人臉 影像學習演算法的效能。在這篇論文當中,我們提出影像轉換來校正人臉影像,因此在 訓練過程中可以不必蒐集不同的人臉方向。此外為了達到更佳的偵測效果,我們還提出 基於膚色分析來降低錯誤偵測的方法。在實驗結果中表明我們所提出的方法在人臉偵測 中可以得到顯著的改善。ii
Vanishing Point-Based Image Rectification for Robust Face Detection
Student:Ching-Ho Wang Advisor:Dr. Jen-Hui Chuang
Institute of Multimedia Engineering
National Chiao Tung University
Abstract
We proposed a novel face detection method based on the vanishing point of vertical lines
image rectification to improve system performance in a common surveillance application.
While most existing face datasets and detection techniques are based on the assumption that
the camera has a similar height as the target faces, in practical situations the camera may be
installed at different heights. Such discrepancy often degrades the detection performance of
algorithms based on learning with frontal face orientation. In this thesis we propose a
transformation to rectify face images such that it is not necessary to collect training data of
different face orientations. Furthermore, a method for reducing false alarms by skin analysis is
proposed for better performance. The experiments show prominent improvements in face
iii
Acknowledgement
I would like to express my great appreciation to Dr. Jen-Hui Chung, for his patient
guidance, enthusiastic encouragement and useful suggestions of this thesis. His willingness to
give his time so generously has been very much appreciated. I also appreciate my thesis
committees, Dr. Hsu-Chun Yen, Dr. Chin-Laung Lei and Dr. Tsai-Pei Wang. Because of their
helpful advices make me to complete this thesis more easily.
In addition, I would like to take this opportunity to thank to the helps provided by all the
members of the Intelligent System Laboratory at National Chiao Tung University during the
planning and development of this research work. Finally, I would also thank for my parents
iv
Contents
摘 要 ... i Abstract ... ii Acknowledgement ... iii Contents ... iv List of Figures ... vList of Tables ... vii
Chapter 1 Introduction ... 1
1.1 Motivation ... 1
1.2 Related Work ... 3
1.2.1 Image Rectification ... 3
1.2.2 Face Detection Techniques ... 4
1.3 Organization of thesis ... 5
Chapter 2 Vanishing Point-based Image Rectification ... 7
2.1 Transformation 1 ... 9
2.2 Transformation 2 ... 11
2.3 Transformation 3 ... 14
Chapter 3 Method for Reducing Fasle Alarms ... 17
3.1 Review of Skin Detection ... 17
3.2 Skin Color Percentage in Candidate Regions ... 19
Chapter 4 Experimental Results ... 24
4.1 Environment Settings ... 24
4.2 Video Demonstration ... 26
4.3 Experiment 1 – Face Detection using Image Rotation ... 28
4.4 Experiment 2 – Face Detection based on Image Rectification ... 33
4.5 Experiment 3 – Face Detection based on Image Rectification with Reducing False Alarm Method ... 38
4.6 Experiment 4 – Face Detection in Synthetic Scene ... 41
Chapter 5 Conclusions and Future Works ... 45
5.1 Conclusions ... 45
5.2 Future Works ... 45
v
List of Figures
FIGURE 1.1:EXAMPLE OF A PERSON WALKING TOWARD A CAMERA WITH ORDINARY FORWARD-LOOKING FACE IN DIFFERENT DIRECTION.(A)A PERSON WALKS TOWARD THE CAMERA IN A STRAIGHT PATH.(B)A
PERSON WALKS TOWARD THE CAMERA IN A DIFFERENT PATH IN (A). ... 2
FIGURE 1.2:(A)ORIGINAL FRONTAL FACE.(B)A BILLBOARD WITH PATTERNS REPRESENTING (A).(C)IMAGE CAPTURED BY SURVEILLANCE CAMERA AT A HIGHER-UP LOCATION.(D)A BILLBOARD WITH PATTERNS REPRESENTING (C). ... 2
FIGURE 1.3:AN IMAGE WITH THREE CHESSBOARDS WITH DIFFERENT POSITIONS CAPTURED BY A HIGHER-UP POSITION CAMERA. ... 3
FIGURE 1.4:DIFFERENT STRUCTURE OF MVFD.(A)PARALLEL CASCADES.(B)WFSTREE. ... 4
FIGURE 1.5:FLOWCHART OF THE PROPOSE FACE DETECTION APPROACH. ... 6
FIGURE 2.1:RECTIFICATION RESULTS OF FIGURES 1.2(C) AND (D).(A)-(B)OBTAINED FROM TRANSFORMATION 1 DISCUSSED IN SECTION 2.1.(C)-(D)OBTAINED FROM TRANSFORMATION 2 DISCUSSED IN SECTION 2.2. ... 7
FIGURE 2.2:THE RELATION BETWEEN THE CAMERA, A STANDING BILLBOARD, AND THE GROUND PLANE, WITH THE CAMERA REPRESENTED BY ITS LENS FOR SIMPLICITY.THE BILLBOARD IS ASSUMED TO BE FACING THE VERTICAL LINE CONTAINING THE CAMERA CENTER. ... 8
FIGURE 2.3:AN ILLUSTRATION DIAGRAM FOR TRANSFORM 1.(A)IMAGE BEFORE RECTIFIED.(B)IMAGE AFTER RECTIFIED. ... 10
FIGURE 2.4:(A)ORIGIN IMAGE.(B)RECTIFIED RESULT OF TRANSFORMATION 1. ... 10
FIGURE 2.5:A ROTATION OF FIGURE 2.2, TO MAKE THE OPTICAL AXIS OF THE CAMERA HORIZONTAL. ... 11
FIGURE 2.6:AN ILLUSTRATION SHOWING THE RELATIONSHIP BETWEEN THE IMAGE SENSOR AND THE IMAGE. ... 12
FIGURE 2.7:(A)ORIGIN IMAGE.(B)RECTIFIED RESULT OF TRANSFORMATION 2. ... 13
FIGURE 2.8:RECTIFIED IMAGE OF FIGURE 1.1(B) BY TRANSFORMATION 2 AND 3.(A)RESULT OF TRANSFORMATION 2.(B)RESULT OF TRANSFORMATION 3. ... 14
FIGURE 2.9:RELATION BETWEEN ORIGINAL IMAGE AND RECTIFIED IMAGE BY TRANSFORMATION 3.(A)ORIGINAL IMAGE.(B)RECTIFIED IMAGE BY TRANSFORMATION 3. ... 15
FIGURE 2.10:(A)ORIGIN IMAGE.(B)RECTIFIED RESULT OF TRANSFORMATION 3. ... 16
FIGURE 3.1:SKIN COLOR REGION DEFINE BY [16] AT Y=110 AND Y=140.(A)YCBCR PLANE AT DIFFERENT Y VALUE.(B)SKIN REGION DEFINE BY EQUATION 3.1.(C)SKIN COLORS AT DIFFERENT Y VALUE. ... 18
FIGURE 3.2:(A)A PICTURE WITH FIVE CANDIDATE REGIONS.(B)0% SKIN COLOR PERCENTAGE IN REGION 1.(C) 33% SKIN COLOR PERCENTAGE IN REGION 2.(D)0% SKIN COLOR PERCENTAGE IN REGION 3.(E)79% SKIN COLOR PERCENTAGE IN REGION 4.(F)0% SKIN COLOR PERCENTAGE IN REGION 5. ... 19
FIGURE 3.3:VIDEOS USED TO FIND THE THRESHOLD OF SKIN PIXEL PERCENTAGE.(A)VIDEO S10.(B)VIDEO O5. 20 FIGURE 3.4:REDUCING FALSE ALARMS WITH 40% SKIN COLOR IN CANDIDATE REGIONS METHOD IN DIFFERENT PATH IMAGES. ... 23
vi
FIGURE 4.1:CAMERA AXIS207MW SETTINGS.(A)EXPERIMENTAL ENVIRONMENT.(B)CLOSE-UP VIEW OF CAMERA. ... 25
FIGURE 4.2:CAMERA VIVOTEKFD8161 SETTINGS.(A)EXPERIMENTAL ENVIRONMENT.(B)CLOSE-UP VIEW OF CAMERA. ... 25
FIGURE 4.3:FRAME EXAMPLES OF A SINGLE PERSON WALKING IN THE LABORATORY.(A)VIDEO S1.(B)VIDEO S2. (C)VIDEO S3.(D)VIDEO S4.(E)VIDEO S5.(F)VIDEO S6.(G)VIDEO S7.(H)VIDEO S8.(I)VIDEO S9. (J)VIDEO S10. ... 26
FIGURE 4.4:FRAME EXAMPLES OF MULTI PEOPLE WALKING IN THE LABORATORY.(A)VIDEO M1.(B)VIDEO M2.(C) VIDEO M3.(D)VIDEO M4.(E)VIDEO M5.(F)VIDEO M6.(G)VIDEO M7. ... 27
FIGURE 4.5:FRAME EXAMPLES OF A SINGLE PERSON WALKING IN THE OUTDOOR ENVIRONMENT.(A)VIDEO O1.(B) VIDEO O2.(C)VIDEO O3.(D)VIDEO O4.(E)VIDEO O5.(F)VIDEO O6.(G)VIDEO O7.(H)VIDEO O8. ... 27 FIGURE 4.6:THE RELATIONSHIP BETWEEN FIVE CAMERAS AND HUMAN FACE IN MUCT. ... 28
FIGURE 4.7:THREE DIFFERENT LIGHTING FOR A PERSON IN MUCT FACE DATABASE CAPTURED BY CAMERA E. .... 29
FIGURE 4.8:THE TESTING RESULT OF FIGURE 4.7(A).1=FACE WAS DETECTED;0=NO FACE WAS DETECTED.
22-(-25)+1=48,48 IS THE MAXIMUM ROTATION IN PLANE DEGREE RESULT FOR FIGURE 4.7(A). ... 29
FIGURE 4.9:EXAMPLE OF ROTATING IMAGE.(A)ORIGIN IMAGE.(B)ROTATE -15 DEGREE.(C)ROTATE 15 DEGREE. (D)ROTATE -30 DEGREE.(E)ROTATE 30 DEGREE. ... 30
FIGURE 4.10:COMBINE THE DETECTION RESULTS OF FIGURE 4.9 INTO ONE IMAGE.(A)COMBINE FIGURE 4.9(A)-(C)
AND 2TP/FP IN THE IMAGE.(B)COMBINE FIGURE 4.9(A)-(E) AND 3TP/FP IN THE IMAGE. ... 30
FIGURE 4.11:RESULTS OF S3 VIDEO.(A)RESULTS OF O.(B)RESULTS OF T1.(C)RESULTS OF T2.(D)RESULT OF
T3. ... 33 FIGURE 4.12:RESULTS OF M7 VIDEO.(A)RESULTS OF O.(B)RESULTS OF T1.(C)RESULTS OF T2.(D)RESULT OF
T3. ... 35 FIGURE 4.13:RESULTS OF O8 VIDEO.(A)RESULTS OF O.(B)RESULTS OF T1.(C)RESULTS OF T2.(D)RESULT OF
T3. ... 36 FIGURE 4.14:THE ENVIRONMENT OF SYNTHETIC SCENE.(A)AN AERIAL IMAGE OF THE SYNTHETIC SCENE.(B)A
SIDE VIEW OF THE SYNTHETIC SCENE WITH CAMERA AT 3 METERS HEIGHT AND 40 DEGREE ANGLE OF DEPRESSION. ... 41
FIGURE 4.15:EXAMPLES OF SYNTHETIZED IMAGES CAPTURE BY CAMERA.(A)2M, .(B)4M, . ... 41 FIGURE 4.16:THE DETECTION RATES OF DIFFERENT TRANSFORMATIONS BY DIFFERENT CAMERA SETTINGS.(A)THE DETECTION RATES FROM DIFFERENT TRANSFORMATIONS ACCORDING TO VARYING CAMERA HEIGHTS. (B)THE DETECTION RATES FROM DIFFERENT TRANSFORMATIONS ACCORDING TO VARYING CAMERA ANGLES... 42
FIGURE 4.17:THE DETECTION RATES OF DIFFERENT FACE DETECTION METHODS BY DIFFERENT CAMERA SETTINGS. (A)THE DETECTION RATES FROM DIFFERENT FACE DETECTION METHODS ACCORDING TO VARYING CAMERA HEIGHTS.(B)THE DETECTION RATES FROM DIFFERENT FACE DETECTION METHODS
vii
List of Tables
TABLE 3.1:THE DETECTION RESULTS FOR S10 WITH DIFFERENT THRESHOLDS OF SKIN PIXEL PERCENTAGE. ... 21
TABLE 3.2:THE DETECTION RESULTS FOR O5 WITH DIFFERENT THRESHOLDS OF SKIN PIXEL PERCENTAGE. ... 22
TABLE 4.1:FACE DETECTION RESULTS OF S1~S10 VIDEOS BY IMAGE ROTATION. ... 31
TABLE 4.2:FACE DETECTION RESULTS OF M1~M7 VIDEOS BY IMAGE ROTATION. ... 32
TABLE 4.3:FACE DETECTION RESULTS OF O1~O8 VIDEOS BY IMAGE ROTATION. ... 32
TABLE 4.4:AVERAGE DETECTION RESULTS OF IMAGE ROTATION METHOD. ... 33
TABLE 4.5:FACE DETECTION RESULTS OF S1~S10 VIDEOS BY IMAGE RECTIFICATION. ... 34
TABLE 4.6:FACE DETECTION RESULTS OF M1~M7 VIDEOS BY IMAGE RECTIFICATION. ... 35
TABLE 4.7:FACE DETECTION RESULTS OF O1~O8 VIDEOS BY IMAGE RECTIFICATION. ... 36
TABLE 4.8:AVERAGE DETECTION RESULTS OF IMAGE RECTIFICATION METHOD. ... 37
TABLE 4.9:THE COMPUTATION TIME(S) OF EACH FACE DETECTION METHODS. ... 37
TABLE 4.10:FACE DETECTION RESULTS OF S1~S10 VIDEOS BY IMAGE RECTIFICATION WITH REDUCING FALSE ALARMS. ... 38
TABLE 4.11:FACE DETECTION RESULTS OF M1~M7 VIDEOS BY IMAGE RECTIFICATION WITH REDUCING FALSE ALARMS. ... 39
TABLE 4.12:FACE DETECTION RESULTS OF O1~O8 VIDEOS BY IMAGE RECTIFICATION WITH REDUCING FALSE ALARMS. ... 39
TABLE 4.13:AVERAGE DETECTION RESULTS OF IMAGE RECTIFICATION WITH REDUCING FALSE ALARMS. ... 40
1
Chapter 1
Introduction
1.1 Motivation
In recent years, computer vision techniques are widely used in the world, such as
surveillance systems [1], access control systems [2] and computer login systems [3]. Most
face detection approaches are based on supervised machine learning and highly depend on the
training data used in the learning stage. To achieve good performance in the detection,
training data under various environmental factors are often needed. However, since it is hard
to always collect sufficient training data for so many factors, many researchers try to lessen
the effects of these factors. While some researchers focus on developing more robust features
or representations [4], others try to recover the underlying properties of the entire image [5] or
the target of interest [6].
In this thesis, alleviation of the effect of perspective distortion introduced by a security
camera mounted at a higher position, which is usually encountered in common surveillance
applications, is considered for face detection. Although most face datasets do include
variations such as different lightings, occlusions, and poses, we focus on such an application
since most researches on face detection are devoted to the special case that all faces are
assumed to have about the same height as the camera. Specifically, we aim to improve face
detection performance under this practical condition wherein the camera is installed at a
position higher than the human head to avoid any tampering. For example, the camera may be
installed above an entrance through which people are entering from different directions with
the ordinary forward-looking face orientation, as shown in Figure 1.1. With such setting, the
inconstancy between the captured faces and those faces in a training set is illustrated in Figure
2
inconstancy. Moreover, the camera is assumed to be mounted casually, only adjusted for
proper viewing angle for surveillance purpose, while its exact location and orientation are
actually unmeasured. The only required information for the proposed face detection approach
is the vanishing point of vertical lines (VPVL), which can be obtained easily. Under such
conditions, we propose three image transformations based on VPVL to partially correct the
perspective distortion to improve the performance of face detection for common surveillance
camera configuration.
(a) (b)
Figure 1.1: Example of a person walking toward a camera with ordinary forward-looking face in different direction. (a) A person walks toward the camera in a straight path. (b) A person walks toward the camera in a different path in (a).
(a) (b) (c) (d)
Figure 1.2: (a) Original frontal face. (b) A billboard with patterns representing (a). (c) Image captured by surveillance camera at a higher-up location. (d) A billboard with patterns representing (c).
3
1.2 Related Work
Image rectification and face detection have both been studied for a long period of time
and numerous techniques have been developed. In the following two subsections we briefly
introduce some most related work.
1.2.1 Image Rectification
Image rectification is a widely investigated topic. Much of the prior work use different
calibration methods to estimate camera parameters and the geometric relation between the 2D
image and the 3D scene. In fact, research on this problem is rather mature if sufficient
auxiliary tools and manually given marks are used. Often, special objects with specific shapes
or patterns are needed for developing the transformation for image rectification. From a
different point of view, other methods exploit the structure presented in the image to ease the
calibration process. The most straightforward approaches for image rectification are to detect
multiple vanishing points (two for each planar patch) [7-12], by edge detection and voting,
texture analysis, etc. One major assumption of these approaches is that the content in the
image is sufficient enough so that the aforementioned vanishing points can be estimated
correctly. For example, Figure 1.3 shows three vertical chessboards with different orientations
that four vanishing points can be obtained from their black/white edges. Different from all the
existing approaches, three image rectification methods based on a single vanishing point are
proposed for enhancement of face detection in this thesis and will be detailed in chapter 2.
4
1.2.2 Face Detection Techniques
Face detection is also a popular topic with plentiful literatures. Among them the
remarkable work proposed by Viola and Jones [13] attracts vast attention in recent years.
There are three main contributions in [13] first, the integral image is used to efficiently
compute a rich set of image features; second, the learning algorithm, Adaboost, is used to
enhance the result of face detection; third, a cascade of several weak classifiers is proposed to
reduce computation time and improve detection accuracy.
(a) (b)
Figure 1.4: Different structure of MVFD. (a) Parallel Cascades. (b) WFS Tree.
The efficiency and effectiveness of [13] make it a basis of the other two related
multi-view face detection (MVFD) works [14, 15]. While in [13] the system is intended for
detecting frontal faces only, in [14] and [15] faces with rotations up to ±90-degree
rotation-out-of-plane and 360-degree rotation-in-plane are also detected. In most MVFD
literatures, human faces are divided into different categories according to the variant
appearances from different view points. The authors in [14] configure weak classifiers as
confidence-rated look-up table of Haar feature for each view category and use Real Adaboost
algorithm to boost them. Furthermore, they also use a nesting-structured detector with a
5
most MVFD methods, the cascades are trained individually for each view, as shown in Figure
1.4(a). Therefore the complexity of computation makes it hard to reach real-time performance.
In [15], a real-time MVFD method with a carefully designed cascade structure, named
Width-First-Search (WFS) tree structure, is proposed. WFS adopts the coarse-to-fine strategy
which divides entire face space into smaller subspaces, as shown in Figure 1.4(b). Although it
improves computational efficiency and accuracy, it is still hard to get satisfied detection
performance when it comes to the application we discussed in this thesis, i.e., face detection
with a surveillance camera mounted at a higher-up location.
1.3 Organization of thesis
In this thesis we propose a novel image transform based on the vanishing point of
vertical lines in the scene to improve the performance of face detection for a surveillance
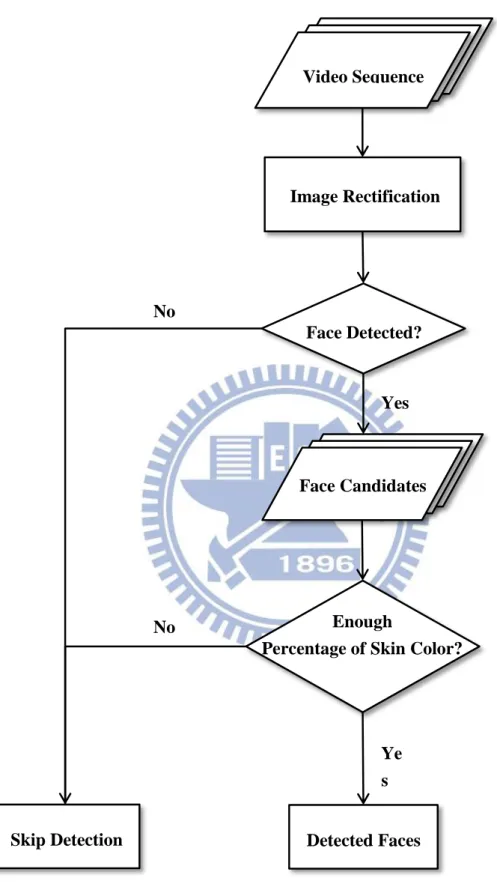
camera with a common higher up mounting position. The flowchart of the proposed face
detection approach in this thesis is shown in Figure 1.5. For each video frame, we first solve
the image distortion problem with one of the proposed image transformations and then use the
face detectors to get face candidates in the transformed image. To further reduce false alarms,
we also propose to use skin color analysis to remove some candidates reported by the face
detectors.
The rest of this thesis is organized as follows. In Chapter 2, we detail the image
transform approach. In Chapter 3, we use skin color percentage in the detection window to
reduce false alarms. The experimental results are shown in Chapter 4 and one can see the
proposed methods can significantly enhance the detection performance. Finally, we give
6
Figure 1.5: Flowchart of the propose face detection approach.
Enough
Percentage of Skin Color?
Face Candidates Face Detected? Image Rectification Video Sequence Detected Faces Skip Detection Yes No Ye s No
7
Chapter 2
Vanishing Point-based Image Rectification
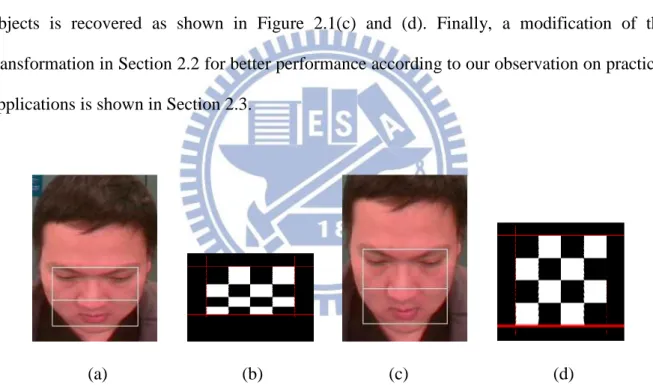
In this chapter we present three different yet related transformations to rectify images
having the perspective distortion caused in common surveillance applications. In Section 2.1,
an intuitive transformation regarded as a base-line approach is proposed. A rectification result
of Figure 1.2(c) and (d) can be seen in Figure 2.1(a) and (b). In Section 2.2, a transformation
significantly improves the result from previous transformation that the aspect ratio of some
objects is recovered as shown in Figure 2.1(c) and (d). Finally, a modification of the
transformation in Section 2.2 for better performance according to our observation on practical
applications is shown in Section 2.3.
(a) (b) (c) (d)
Figure 2.1: Rectification results of Figures 1.2(c) and (d). (a)-(b) Obtained from transformation 1 discussed in Section 2.1. (c)-(d) Obtained from transformation 2 discussed in Section 2.2.
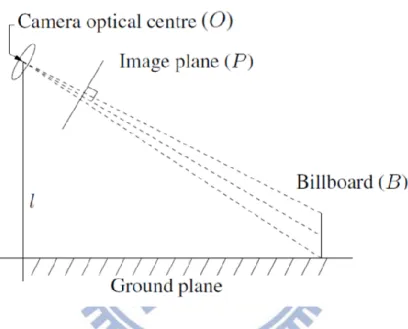
For better understanding of the basic idea of the proposed method, we first describe how
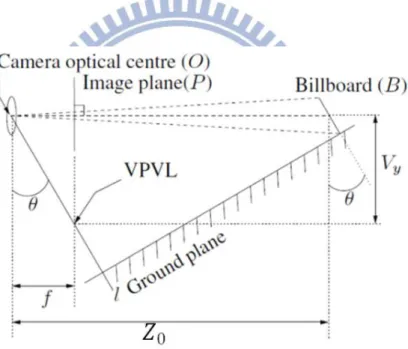
an object is captured by a surveillance camera. As shown in Figure 2.2, assume the camera is
located relatively higher than the object and its optical axis is not horizontal. Suppose there is
a square billboard standing vertically in front of the camera, with the pattern on the billboard
8
in Figure 1.2(d). Furthermore, the extension of vertical lines on the billboard will meet at a
single point in the image plane.
For simplicity, in the following discussion we assume that the image center is the origin
of the image plane, and the VPVL, V = ( ), can be derived from images of vertical lines via simple camera calibration. Additionally, each image is assumed to be rotated in advance
such that .
Figure 2.2: The relation between the camera, a standing billboard, and the ground plane, with the camera represented by its lens for simplicity. The billboard is assumed to be facing the vertical line containing the camera center.
9
2.1 Transformation 1
For the surveillance system described in Figure 2.2, we find that all square patterns on
the billboard, B, are transformed to trapezoids in the image plane, P, as shown in Figure
1.2(d). An intuitive way of image rectification is to make all lines pointing to VPVL vertically
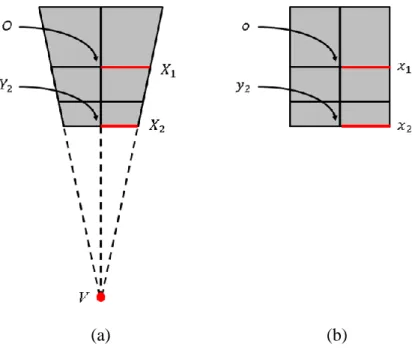
parallel. To this end, we propose our first transformation and explain it as follows. Consider
Figure 2.3, where we would like to make an image, Figure 2.3(b) from the original image,
Figure 2.3(a). In particular, we would like to transform two horizontal line segments, and , in Figure 2.3(a) into and in Figure 2.3(b), respectively such that and are still horizontal and have the same length where O and o are the image center of
Figure 2.3(a) and (b). According to triangle geometry and simple calculation, we have
(2.1) (2.2)
In general we can define a transformation such that for each pixel (x, y) in Figure 2.3(b),
its content can be obtained at position (X, Y) in Figure 2.3(a) such that
(2.3)
In Figure 2.1(b) we can see that each trapezoid can be recovered as a rectangle, but not a
square. Moreover, a white block near the top is much larger than that near the bottom,
resulting in rectangles of different heights. At last Figure 2.4 shows an example of image
10
(a) (b)
Figure 2.3: An illustration diagram for transform 1. (a) Image before rectified. (b) Image after rectified.
(a) (b)
11
2.2 Transformation 2
In order to further recover the aspect ratio of an object, a novel image transformation is
presented in this section. To simplify the presentation, we first rotate the camera model shown
in Figure 2.2 to make the optical axis horizontal as illustrated in Figure 2.5, where θ is the tilt
angle, f is the focal length of the camera, l is a vertical line connect the optical center (O) and
the ground, and is distance from the optical center to the pixel which is the intersection of
the optical axis and the billboard (B). Furthermore, we set the origin of the 3D coordinate
system to be the optical center, with the z-axis to the right, the y-axis pointing downward, and
x-axis pointing out of the paper.
Figure 2.5: A rotation of Figure 2.2, to make the optical axis of the camera horizontal.
As shown in Figure 2.6, the value of the unknown parameter f can be found as
√ (2.4)
where F is the focal length in standard metric units, L is the size of the image sensor, and
12
Figure 2.6: An illustration showing the relationship between the image sensor and the image.
To investigate the relation between the billboard (B) and the image plane (P), let
(2.5)
where represents the 3D coordinates and represents 2D coordinates of a pixel on B.
Moreover, let denote the 3D coordinates of a pixel on the image plane (P), we have
(2.6)
Because P is parallel to the XY-plane of the 3D coordinate, is also the 2D coordinates of this corresponding pixel on P. Thus we can define an image transformation
13
where with being the coordinates of the transformed pixel. Finally, an example of image rectification of transformation 2 is shown in Figure 2.7.
In this transformation, affects only the scale of transferred image and can be
assigned with an arbitrary value per user’s requirement. On the other hand, for the remaining
unknown θ in equation (2.7), we can derive and as:
√ √ (a) (b)
14
2.3 Transformation 3
One characteristic of transformation 2 is that it is only valid for billboards parallel to the
XY-plane in the 3D coordinate. However, in most applications we are interested in all people facing to l in Figure 2.2. For example, if a camera is installed above an entrance, we are more
interested in people walking toward the entrance. Besides, people facing l also provide more
frontal face information and are thus more valuable. To make the proposed method more
suitable for any billboard facing l, we further propose a modified version, namely
transformation 3, of transformation 2 such that after the transformation, all pixels on image
plane (P) with the same distance to VPVL will be mapped to the same horizontal line in the
recovered image. The difference between results of transformation 2 and 3 is also illustrated
in Figure 2.8. In Figure 2.8 an image containing a person facing to l but not to the XY-plane is
rectified by transformation 2 and 3 respectively. For better illustrations, we draw a green line
on the person's eyes. It is obvious that the green line in the result of transformation 2 (Figure
2.8(a)) is not horizontal while in Figure 2.8(b) the green line is nearly horizontal and thus the
face in Figure 2.8(b) is more close to a normal face.
(a) (b)
Figure 2.8: Rectified image of Figure 1.1(b) by transformation 2 and 3. (a) Result of transformation 2. (b) Result of transformation 3.
15
Figure 2.9 explains how the corresponding pixels in the original image can be found
according to the above description of transformation 3. In Figure 2.9 several corresponding
lines and pixels in transformation 3 (Figure 2.9(b)) and in the original image (Figure 2.9(a))
are illustrated. Specifically, the and represent the lines with in the original image and transformation 3, respectively. Now we show that for the pixel in Figure 2.9(b),
how to find its corresponding pixel in Figure 2.9(a). Given the pixel , we first find the pixel which is located at the central vertical line and has the same y-coordinate as . According to transformation 2 we know that comes from the pixel in the original
image. Then we rotate around the VP by which is proportional to the distance, , between and as : [ ] [ ] [ ] [ ] (2.9) (a) (b)
Figure 2.9: Relation between original image and rectified image by transformation 3. (a) Original image. (b) Rectified image by transformation 3.
16
Notice that and are both 0 and hence can be ignored. After combining Equation (2.9) as well as equation (2.7) of the transformation 2, we derive the formulation of
transformation 3:
( ) (
)
( ) (
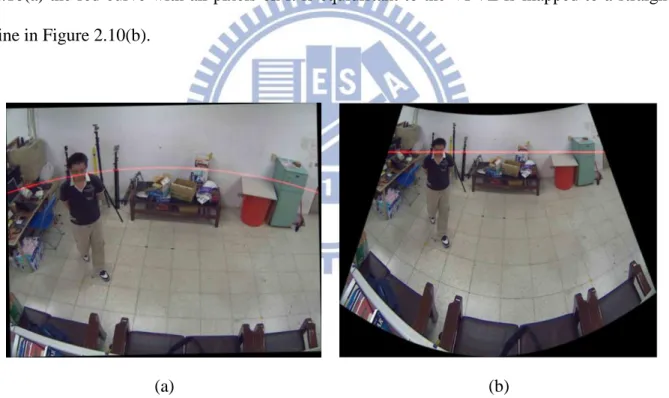
) where represents a pixel on rectified image and represents a pixels on plane P. An example of the transformation result is shown in Figure 2.10, where in Figure
2.10(a) the red curve with all pixels on it is equidistant to the VPVL is mapped to a straight
line in Figure 2.10(b).
(a) (b)
17
Chapter 3
Method for Reducing False Alarms
In this chapter we try to reduce false alarms for better detection performance. We
propose to use skin detection for its efficiency. The skin detection is carried only on regions
of candidates found by face detectors to further reduce the computation demand. In Section
3.1, the skin detection adopted in our system in introduced. The complete process and the
final results are present in Section 3.2.
3.1 Review of Skin Detection
In the work proposed by Garcia et al. [16], a skin color sub-space in YCbCr space is
figured out for detection of skin regions in MEPG streams and JPEG images. A data set
containing 950 skin colors samples is used in order to approximate the color sub-space.
These samples are extracted from various still images and video frames, covering a large
range of skin color appearance caused by different races and different lighting conditions.
Different from prior work, Garcia et al. propose to use varying intensity (Y) values to deal
with strong lighting variations as they notice that the skin color distribution turns out to be
18
distribution borders in the extreme light and dark cases, the authors actually propose two
groups of planes equations depending on two areas of the color space, separated by the
horizontal plane Y = 128. Their proposed planes equations are present in equation (3.1) while
two skin color sub-spaces defined by equation (3.1) according to two different Y values are
shown in Figure 3.1.
(a)
(b)
(c)
Figure 3.1: Skin color region define by [16] at Y = 110 and Y = 140. (a) YCbCr plane at different Y value. (b) Skin region define by equation 3.1. (c) Skin colors at different Y value.
19
3.2 Skin Color Percentage in Candidate Regions
(a)
(b) (c) (d) (e) (f)
Figure 3.2: (a) A picture with five candidate regions. (b) 0% skin color percentage in region 1. (c) 33% skin color percentage in region 2. (d) 0% skin color percentage in region 3. (e) 79% skin color percentage in region 4. (f) 0% skin color percentage in region 5.
In this section, we demonstrate how to reduce false alarms with skin detection and get a
better detection performance. For each image frame, we first find several candidates by the
face detector. Then we exploit the skin detection method mentioned in section 3.1 to find skin
pixels among regions of these candidates. Finally a candidate is taken out if the percentage of
skin pixels in the region under it is less than a threshold. Take Figure 3.2 for example, in
Figure 3.2(a) five candidates are detected and marked with red squares. For each candidate
20
3.2(b)-(f). Therefore, we may take out some bad candidates if we can find a suitable threshold
for skin pixel percentage. In order to determine such a threshold that can separate true faces
and false alarms properly, two videos are tested, i.e., S10 for indoor environment and O5 for
outdoor environment, as shown in Figure 3.3. Table 3.1 and Table 3.2 show face detection
results for different threshold values for the two videos. One can see that when the threshold
is set between 10% and 40% for indoor environment (between 15% and 35% for outdoor
environment) best detection results can be achieved. With such thresholds, we keep almost as
many true positives as the origin while reduce most false positives.
And we set the threshold to 40% and show the comparison of face detection results on
another video with and without the false alarm detection in Figure 3.4. One can see that with
false alarm detection most false positives have been removed while the true faces are still
preserved.
(a)
(b)
21
Table 3.1: The detection results for S10 with different thresholds of skin pixel percentage.
TP FP FN origin 80 31 0 P>0% 80 9 0 P>5% 80 2 0 P>10% 80 0 0 P>15% 80 0 0 P>20% 80 0 0 P>25% 80 0 0 P>30% 80 0 0 P>35% 80 0 0 P>40% 80 0 0 P>45% 78 0 2 P>50% 63 0 17 P>55% 41 0 39 P>60% 19 0 61 P>65% 0 0 80 P>70% 0 0 80 P>75% 0 0 80 P>80% 0 0 80 P>85% 0 0 80 P>90% 0 0 80 P>95% 0 0 80 P=100% 0 0 80
22
Table 3.2: The detection results for O5 with different thresholds of skin pixel percentage.
TP FP FN origin 115 184 0 P>0% 115 80 0 P>5% 115 56 0 P>10% 115 6 0 P>15% 115 0 0 P>20% 115 0 0 P>25% 115 0 0 P>30% 115 0 0 P>35% 115 0 0 P>40% 112 0 3 P>45% 107 0 8 P>50% 102 0 13 P>55% 96 0 19 P>60% 85 0 30 P>65% 78 0 37 P>70% 70 0 45 P>75% 39 0 76 P>80% 14 0 101 P>85% 6 0 109 P>90% 0 0 115 P>95% 0 0 115 P=100% 0 0 115
23
24
Chapter 4
Experimental Results
In this chapter, we give four experiments to show how face detection can be improved
with the proposed method. We have tested our method on videos under three real
environments as well as on some synthesized images. In Section 4.1, the specifications of
cameras used in our experiments and the installation parameters are detailed. In Section 4.2,
we show some image samples from our testing videos. An experiment for comparison is
present in Section 4.3. In this experiment, the videos are simply rotated such that the new
position of the VPVL is at the horizontal center. The face detection results of our method with
or without reducing false alarms method on videos under real environments are reported in
Section 4.4 and in Section 4.5, respectively. Finally, in Section 4.6 we show the experiments
on synthesized images with multiple camera installation settings.
4.1 Environment Settings
Through our experiments two cameras, named as AXIS 207MW and VIVOTEK FD8161
according to their model names, are used. In the indoor experiments, the AXIS 207MW is
attached at the ceiling without any calibration and is located about 2.7 meters above the
ground plane, as shown in Figure 4.1. In the outdoor experiments, we install the VIVOTEK
FD8161 above an entrance also without any calibration. The height of the camera is about 2.5
25
(a) (b)
Figure 4.1: Camera AXIS 207MW settings. (a) Experimental environment. (b) Close-up view of camera.
(a) (b)
26
4.2 Video Demonstration
We have captured 25 videos and use them in our experiments. As mentioned previously,
our experiments contain videos both on an indoor environment and on an outdoor
environment. These videos have different resolutions according to the camera models and
thus have different resolutions on the two environments. In our experiments the resolutions of
the indoor and outdoor videos are 640x480 and 800x600, respectively. In all videos one or
multiple people walking and roughly toward the camera are captured. Furthermore, these
people start walking from different positions so that we can see faces with different sizes,
rotations, and distortions, in these videos.
(a) (b) (c) (d)
(e) (f) (g) (h)
(i) (j)
Figure 4.3: Frame examples of a single person walking in the laboratory. (a) Video S1. (b) Video S2. (c) Video S3. (d) Video S4. (e) Video S5. (f) Video S6. (g) Video S7. (h) Video S8. (i) Video S9. (j) Video S10.
27
(a) (b) (c) (d)
(e) (f) (g)
Figure 4.4: Frame examples of multi people walking in the laboratory. (a) Video M1. (b) Video M2. (c) Video M3. (d) Video M4. (e) Video M5. (f) Video M6. (g) Video M7.
(a) (b) (c) (d)
(e) (f) (g) (h)
Figure 4.5: Frame examples of a single person walking in the outdoor environment. (a) Video O1. (b) Video O2. (c) Video O3. (d) Video O4. (e) Video O5. (f) Video O6. (g) Video O7. (h) Video O8.
28
4.3 Experiment 1 – Face Detection using Image Rotation
In this section, we present a simple method using only image rotation to improve face
detection with a surveillance camera. Based on the observation that faces in directions other
than the front of the camera seem like faces with in-plane rotations, to treat them just like
in-plane rotated faces like [14, 15] is an intuitive way. In [14, 15], faces with rotations in
different degrees are detected by rotated detectors. Unlike them, for easier implementation,
we instead rotate the image and repeat the detection procedure several times.
To decide the amount of the angular shift in each face detection procedure, we first
investigate the limitation of the frontal face detector, which is proposed in [17] and provided
in OpenCV, on in-plane rotations. A subset of the MUCT face database [18] is used in this
testing. More specifically, we use images captured by the camera "e" as shown in Figure 4.6.
There are total 751 images in the database and each subject is captured under 2 to 3 different
lightings as shown in Figure 4.7. In our testing each image is rotated 360 times with the step
of one degree and then the face detection results are carried out on all rotated versions. The
detection result of an image with all its rotated versions is shown in Figure 4.8 where the
maximum continuous region in which the face detection succeeds is of 48 degree. With the
same procedure on all images, we have the result that the smallest maximum continuous
region is of 28 degree and the average maximum continuous region is of 47.47 degree.
29
(a) (b) (c)
Figure 4.7: Three different lighting for a person in MUCT face database captured by camera e.
Figure 4.8: The testing result of Figure 4.7(a). 1=face was detected; 0=no face was detected. 22-(-25)+1=48, 48 is the maximum rotation in plane degree result for Figure 4.7(a).
Although the face detector is proved effective for faces rotated up to ±23.7 degree (half
of the average result 47.47), we take a relatively conservative rotation step of 15 degree in our
experiments. The maximum in-plane rotation of faces in our videos is about +24.8 degree,
thus it should be enough to rotate the images by ±15 degrees to deal with all in-plane rotations
occurred here. However, we also rotate images by ±30 degree and merge the results for more
robustness. An example of face detection on an image in rotations of different degrees is
shown in Figure 4.9. In Figure 4.9 the face detector can detect only one face in the original
image. In the meantime, the remaining two faces are detected in the -15 and -30 degree
rotated versions separately. It is obvious that more faces can be found if we provide more
30
(a) (b) (c)
(d) (e)
Figure 4.9: Example of rotating image. (a) Origin image. (b) Rotate -15 degree. (c) Rotate 15 degree. (d) Rotate -30 degree. (e) Rotate 30 degree.
By combining results in different rotations, we have the result shown in Figure 4.10. One
can see that although more faces are detected, the number of false positives is also increased.
(a) (b)
Figure 4.10: Combine the detection results of Figure 4.9 into one image. (a) Combine Figure 4.9(a)-(c) and 2 TP/FP in the image. (b) Combine Figure 4.9(a)-(e) and 3 TP/FP in the image.
31
Finally we show the detection results in Table 4.1 ~ Table 4.3. Where O represents the
origin method without any preprocessing on images; R1 represents combining the results on
the origin images and on the 15-degree rotated version; and R2 represents combining results
on the origin images, 15-degree rotated version and 30-degree rotated version. In the table, we
give precision and recall to show the detection performance. One can see that the more rotated
images are added, the higher recall and lower precision will be. In Table 4.4 we give the
average results across all videos. It is obviously to see that R2 has the best recall but the
lowest precision in most groups.
Table 4.1: Face detection results of S1 ~ S10 videos by image rotation.
S1 S2 S3 S4
Recall Precision Recall Precision Recall Precision Recall Precision
O 100% (126/126) 61.1% (126/206 30.5% (37/121) 40.6% (37/91) 38.8% (33/85) 27.5% (33/120) 8.8% (8/90) 7.7% (8/95) R1 100% (126/126) 49.6% (126/254) 99.1% (120/121) 55.8% (120/125) 96.4% (82/85) 34.4% (82/238) 97.7% (88/90) 35.3% (88/249) R2 100% (126/126) 47.0% (126/268) 99.1% (120/121) 50.0% (120/120) 96.4% (82/85) 32.2% (82/254) 100% (90/90) 33.4% (90/269) S5 S6 S7 S8
Recall Precision Recall Precision Recall Precision Recall Precision
O 1.8% (1/55) 2.4% (1/41) 22.8% (13/57) 22.0% (13/59) 1.1% (1/85) 1.4% (1/71) 100% (79/79) 63.7% (79/124) R1 98.1% (54/55) 38.8% (54/139) 98.2% (56/57) 33.5% (56/167) 97.6% (83/85) 36.2% (83/229) 100% (79/79) 51.9% (79/152) R2 98.1% (54/55) 35.0% (54/154) 100% (57/57) 32.3% (57/176) 97.6% (83/85) 34.2% (83/242) 100% (79/79) 45.6% (79/173) S9 S10
Recall Precision Recall Precision
O 95.5% (86/90) 61.4% (86/140) 100% (80/80) 72.0% (80/111) R1 100% (90/90) 39.1% (90/230) 100% (80/80) 42.1% (80/190) R2 100% (90/90) 35.1% (90/256) 100% (80/80) 34.0% (80/245)
32
Table 4.2: Face detection results of M1 ~ M7 videos by image rotation.
M1 M2 M3 M4
Recall Precision Recall Precision Recall Precision Recall Precision
O 42.2% (76/180) 69.0% (76/110) 50.4% (58/115) 71.6 % (58/81) 50.0% (62/124) 65.2% (62/95) 51.9% (109/210) 74.6% (109/146) R1 66.6% (120/180) 60.3% (120/199) 62.6% (72/115) 56.6% (72/127) 76.6% (95/124) 59.3% (95/160) 77.6% (163/210) 73.7% (163/221) R2 75.0% (135/180) 48.9% (134/276) 79.1% (91/115) 45.5% (91/200) 89.5% (111/124) 44.4% (111/250) 83.3% (175/210) 55.2% (175/317) M5 M6 M7
Recall Precision Recall Precision Recall Precision
O 46.9% (123/262) 75.9% (123/162) 62.2% (79/127) 60.7% (79/130) 61.4% (129/210) 61.1% (129/211) R1 69.4% (182/262) 67.1% (182/271) 69.2% (88/127) 48.3% (88/182) 69.5% (146/210) 51.2% (146/285) R2 77.1% (202/262) 51.5% (202/392) 77.9% (99/127) 44.7% (99/221) 75.2% (158/210) 48.0% (158/329)
Table 4.3: Face detection results of O1 ~ O8 videos by image rotation.
O1 O2 O3 O4
Recall Precision Recall Precision Recall Precision Recall Precision
O 1.1% (1/86) 1.1% (1/91) 91.1% (82/90) 53.5% (82/153) 100% (90/90) 56.2% (90/160) 91.2% (73/80) 49.3% (73/148) R1 65.1% (56/86) 22.7% (56/246) 91.1% (82/90) 31.1% (82/263) 100% (90/90) 37.8% (90/238) 93.7% (75/80) 41.2% (75/182) R2 70.9% (61/86) 19.9% (61/306) 91.1% (82/90) 29.0% (82/282) 100% (90/90) 33.5% (90/268) 93.7% (75/80) 36.7% (75/204) O5 O6 O7 O8
Recall Precision Recall Precision Recall Precision Recall Precision
O 93.0% (107/115) 58.4% (107/183) 98.9 % (94/95) 48.9% (94/192) 98.2% (113/115) 70.1% (113/161) 86.8% (139/160) 57.2% (139/243) R1 97.3% (112/115) 36.3% (112/308) 98.9% (94/95) 27.5% (94/341) 100% (115/115) 62.8% (115/183) 91.2% (146/160) 45.7% (146/319) R2 97.3% (112/115) 30.2% (112/370) 98.9% (94/95) 24.2% (94/388) 100% (115/115) 57.7% (115/199) 91.2% (146/160) 36.5% (146/400)
33
Table 4.4: Average detection results of image rotation method.
S1 ~ S10 videos M1 ~ M7 videos O1 ~ O8 videos All 25 videos
Recall Precision Recall Precision Recall Precision Recall Precision
O 49.9% 35.9% 52.1% 68.3% 82.5% 49.3% 61.5% 51.2%
R1 98.7% 41.6% 70.2% 59.5% 92.1% 38.1% 87.0% 46.4%
R2 99.1% 37.8% 79.5% 48.3% 92.8% 33.4% 90.4% 39.8%
4.4 Experiment 2 – Face Detection based on Image Rectification
In this section, we show the detection performance by the proposed image rectification
methods. The results are reported in Table 4.5 ~ Table 4.8. Where O means the origin method
without any preprocessing on images; T1 means transformation 1; T2 means transformation 2;
and T3 means transformation 3. Again, we give precision and recall to show the detection
performance. Some images with different rectifications and face detection result are present in
Figure 4.11~4.13.
(a) (b) (c) (d)
34
In Table 4.8 we find that the face detection performances are generally improved by the
proposed methods. With the proposed three transformations the overall recall are improved
from 0.615 to 0.781, 0.837, and 0.905 separately. As the results show, transformation 3 has
the best recall. We also find that transformation 3 is very stable through all directions.
Table 4.5: Face detection results of S1 ~ S10 videos by image rectification.
S1 S2 S3 S4
Recall Precision Recall Precision Recall Precision Recall Precision
O 100% (126/126) 61.1% (126/206) 30.5% (37/121) 40.6% (37/91) 38.8% (33/85) 27.5% (33/120) 8.8% (8/90) 7.7% (8/95) T1 100% (126/126) 78.2% (126/161) 81.8% (99/121) 66.4% (99/149) 83.5% (71/85) 59.1% (71/120) 77.7% (70/90) 56.0% (70/125) T2 100% (126/126) 62.3% (126/202) 98.3% (119/121) 59.8% (119/199) 90.5% (77/85) 30.9% (77/249) 94.4% (86/90) 34.2% (86/90) T3 100% (126/126) 43.9% (126/287) 96.6% (117/121) 42.7% (117/274) 97.6% (83/85) 52.2% (83/159) 98.8% (89/90) 47.5% (89/187) S5 S6 S7 S8
Recall Precision Recall Precision Recall Precision Recall Precision
O 1.8% (1/55) 2.4% (1/41) 22.8% (13/57) 22.0% (13/59) 1.1% (1/85) 1.4% (1/71) 100% (79/79) 63.7% (79/124) T1 98.1% (54/55) 65.0% (54/83) 98.2% (56/57) 63.6% (56/98) 81.1% (69/85) 56.1% (69/123) 100% (79/79) 57.2% (79/138) T2 94.5% (52/55) 33.7% (52/154) 98.2% (56/57) 33.9% (56/165) 91.7% (78/85) 32.2% (78/242) 100% (79/79) 34.2% (79/231) T3 100% (55/55) 49.1% (55/112) 100% (57/57) 50.4% (57/113) 98.8% (84/85) 48.5% (84/173) 100% (79/79) 46.7% (79/169) S9 S10
Recall Precision Recall Precision
O 95.5% (86/90) 61.4% (86/140) 100% (80/80) 72.0% (80/111) T1 78.8% (71/90) 65.7% (71/108) 100% (80/80) 62.9% (80/127) T2 92.2% (83/90) 33.2% (83/250) 100% (80/80) 36.7% (80/218) T3 100% (90/90) 49.1% (90/183) 100% (80/80) 54.7% (80/146)
35
Table 4.6: Face detection results of M1 ~ M7 videos by image rectification.
M1 M2 M3 M4
Recall Precision Recall Precision Recall Precision Recall Precision
O 42.2% (76/180) 69.0% (76/110) 50.4% (58/115) 71.6% (58/81) 50.0% (62/124) 65.2% (62/95) 51.9% (109/210) 74.6% (109/146) T1 55.5% (100/180) 67.1% (100/149) 60.0% (69/115) 51.8% (69/133) 65.3% (81/124) 60.0% (81/135) 70.9% (149/210) 60.8% (149/245) T2 61.1% (110/180) 55.2% (110/199) 69.5% (80/115) 44.6% (80/179) 66.9% (83/124) 44.6% (83/186) 80.0% (168/210) 54.9% (165/306) T3 74.4% (134/180) 62.3% (134/215) 74.7% (86/115) 51.8% (86/166) 89.5% (111/124) 57.2% (111/196) 84.2% (177/210) 51.6% (177/343) M5 M6 M7
Recall Precision Recall Precision Recall Precision
O 46.9% (123/262) 75.9% (123/162) 62.2% (79/127) 60.7% (79/130) 61.4% (129/210) 61.1% (129/211) T1 59.1% (155/262) 58.4% (155/265) 66.1% (84/127) 70.0% (84/120) 54.7% (115/210) 61.5% (115/187) T2 64.1% (168/262) 47.0% (168/357) 74.0% (94/127) 64.3% (94/146) 59.0% (124/210) 48.2% (124/256) T3 77.4% (203/262) 49.5% (203/410) 79.5% (101/127) 59.7% (101/169) 74.2% (156/210) 48.3% (156/323) (a) (b) (c) (d)
36
Table 4.7: Face detection results of O1 ~ O8 videos by image rectification.
O1 O2 O3 O4
Recall Precision Recall Precision Recall Precision Recall Precision
O 1.1% (1/86) 1.1% (1/91) 91.1% (82/90) 53.5% (82/153) 100% (90/90) 56.2% (90/160) 91.2% (73/80) 49.3% (73/148) T1 32.5% (28/86) 16.7% (28/167) 85.5% (77/90) 48.4% (77/159) 100% (90/90) 52.9% (90/170) 86.2% (69/80) 53.9% (69/128) T2 50.0% (43/86) 19.2% (43/224) 91.1% (82/90) 37.1% (82/221) 97.7% (88/90) 41.7% (88/211) 92.5% (74/80) 46.8% (74/158) T3 69.7% (60/86) 26.3% (60/228) 91.1% (82/90) 34.0% (82/241) 100% (90/90) 38.4% (90/234) 98.7% (79/80) 40.9% (79/193) O5 O6 O7 O8
Recall Precision Recall Precision Recall Precision Recall Precision
O 93.0% (107/115) 58.4% (107/183) 98.9% (94/95) 48.9% (94/192) 98.2% (113/115) 70.1% (113/161) 86.8% (139/160) 57.2% (139/243) T1 93.0% (107/115) 58.7% (107/182) 83.1% (79/95) 40.1% (79/197) 95.6% (110/115) 71.9% (110/153) 88.1% (141/160) 53.0% (141/266) T2 94.7% (109/115) 49.3% (109/221) 87.3% (83/95) 29.9% (83/277) 98.2% (113/115) 58.8% (113/192) 88.7% (142/160) 42.0% (142/338) T3 95.6% (110/115) 37.4% (110/294) 98.9% (94/95) 28.9% (94/325) 100% (115/155) 66.8% (115/172) 93.7% (150/160) 53.9% (150/278) (a) (b) (c) (d)
37
Table 4.8: Average detection results of image rectification method.
S1 ~ S10 videos M1 ~ M7 videos O1 ~ O8 videos All 25 videos
Recall Precision Recall Precision Recall Precision Recall Precision
O 49.9% 35.9% 52.1% 68.3% 82.5% 49.3% 61.5% 51.2%
T1 89.9% 63.0% 61.6% 61.3% 83.0% 49.4% 78.1% 57.9%
T2 95.9% 39.1% 67.8% 51.2% 87.5% 40.6% 83.7% 43.6%
T3 99.1% 48.4% 79.1% 54.3% 93.4% 40.8% 90.5% 47.8%
Now we compare the proposed methods with the image rotation method mentioned in
the previous subsection. Comparing Table 4.4 and Table 4.8, we can see that T3 has better
recall and precision than R1 and R2. The computation times of different methods on three
different videos are shown in Table 4.9. Where T1 is 1.3 times slower than O; T2 and T3 are
almost 1.5 times slower than O. When compared with the image rotation method, we see that
T1, T2, and T3 on the contrary are over 1.8 and 3.3 times faster R1 and R2. This leads to the
conclusion that although image rotation can improve the detection performance, it also results
more false positives and computation times than our proposed methods.
Table 4.9: The computation time(s) of each face detection methods.
Frame Number O T1 T2 T3 R1 R2
S1 126 70.14 92.00 112.72 105.14 189.47 327.47
M1 90 47.44 69.57 77.19 71.48 132.91 217.20
38
4.5 Experiment 3 – Face Detection based on Image Rectification
with Reducing False Alarms Method
In this section, we show the face detection results by combining the false alarms
reducing method proposed in Chapter 3 with the transformation 3. As suggested in Section
3.2, we test two thresholds, 40 and 45, on percentage of skin region in this experiment. The
results are reported in Table 4.10 ~ 4.12. Where T3 denotes transformation 3; P0 means
reducing false alarms in T3 with the threshold 35%; P1 means reducing false alarms in T3
with the threshold 40%; and P2 means reducing false alarms in T3 with the threshold 45%. As
used in previous sections, we give precision and recall to show the detection performance.
Table 4.10: Face detection results of S1 ~ S10 videos by image rectification with reducing false alarms.
S1 S2 S3 S4
Recall Precision Recall Precision Recall Precision Recall Precision
T3 100% (126/126) 43.9% (126/287) 96.6% (117/121) 42.7% (117/274) 97.6% (83/85) 52.2% (83159) 98.8% (89/90) 47.5% (89/187) P1 100% (126/126) 100% (126/126) 96.6% (117/121) 100% (117/117) 97.6% (83/85) 98.8% (83/84) 98.8% (89/90) 100% (89/89) P2 100% (126/126) 100% (126/126) 96.6% (117/121) 100% (117/117) 97.6 % (83/85) 100% (83/83) 98.8% (89/90) 100% (89/89) S5 S6 S7 S8
Recall Precision Recall Precision Recall Precision Recall Precision
T3 100% (55/55) 49.1% (55/121) 100% (57/57) 50.4% (57/113) 98.8% (84/85) 48.5% (84/173) 100% (79/79) 46.7% (79/169) P1 100% (55/55) 98.2% (55/56) 100% (57/57) 100% (57/57) 98.8% (84/85) 100% (84/84) 100% (79/79) 100% (79/79) P2 100% (55/55) 100% (55/55) 100% (57/57) 100% (57/57) 98.8% (84/85) 100% (84/84) 100% (79/79) 100% (79/79) S9 S10
Recall Precision Recall Precision
T3 100% (90/90) 49.1% (90/183) 100% (80/80) 54.7 % (80/146) P1 88.8% (80/90) 100% (80/80) 100% (80/80) 100% (80/80) P2 80.0% (72/90) 100% (72/72) 95.0% (76/80) 100% (76/76)
39
Table 4.11: Face detection results of M1 ~ M7 videos by image rectification with reducing false alarms.
M1 M2 M3 M4
Recall Precision Recall Precision Recall Precision Recall Precision
T3 74.4% (134/180) 62.3% (134/215) 74.7% (86/115) 51.8% (86/166) 89.5% (111/124) 57.2% (111/196) 84.2% (177/210) 51.6% (177/343) P1 74.4% (134/180) 100% (134/134) 74.7% (86/115) 100% (86/86) 89.5% (111/124) 100% (111/111) 84.2% (177/210) 97.2% (177/185) P2 74.4% (134/180) 100% (134/134) 74.7% (86/115) 100% (86/86) 89.5% (111/124) 100% (111/111) 84.2% (177/210) 100% (177/177) M5 M6 M7
Recall Precision Recall Precision Recall Precision
T3 77.4% (203/262) 49.5% (203/410) 79.5% (101/127) 59.7% (101/169) 74.2% (156/210) 48.3% (156/323) P1 77.4% (203/262) 97.6% (203/208) 79.5% (101/127) 99.0% (101/102) 73.8% (155/210) 98.7% (155/157) P2 77.4% (203/262) 100% (203/203) 79.5% (101/127) 100% (101/101) 73.8% (155/210) 99.3% (155/156)
Table 4.12: Face detection results of O1 ~ O8 videos by image rectification with reducing false alarms.
O1 O2 O3 O4
Recall Precision Recall Precision Recall Precision Recall Precision
T3 69.7% (60/86) 26.3% (60/228) 91.1% (82/90) 34.0% (82/241) 100% (90/90) 38.4% (90/234) 98.7% (79/80) 40.9% (79/193) P0 69.7% (60/86) 100% (60/60) 90.0% (81/90) 100% (81/81) 100% (90/90) 100% (90/90) 98.7% (79/80) 100% (79/79) P1 69. % (60/86) 100% (60/60) 83.3% (75/90) 100% (75/75) 100% (90/90) 100% (90/90) 98.7% (79/80) 100% (79/79) O5 O6 O7 O8
Recall Precision Recall Precision Recall Precision Recall Precision
T3 95.6% (110/115) 37.4% (110/294) 98.9% (94/95) 28.9% (94/325) 100% (115/115) 66.8% (115/172) 93.7% (150/160) 53.9% (150/278) P0 100% (115/115) 100% (115/115) 98.9% (94/95) 100% (94/94) 99.1% (114/115) 99.1% (114/115) 93.7% (150/160) 100% (150/150) P1 97.3% (112/115) 100% (112/112) 98.9% (94/95) 100% (94/94) 93.0% (107/115) 99.0% (107/108) 93.7% (150/160) 100% (150/150)
40
Table 4.13: Average detection results of image rectification with reducing false alarms.
S1 ~ S10 videos M1 ~ M7 videos O1 ~ O8 videos All 25 videos
Recall Precision Recall Precision Recall Precision Recall Precision
T3 99.1% 48.4% 79.1% 54.3% 93.4% 40.8% 90.5% 47.8%
P0 - - - - 93.7% 99.8% 93.7% 99.8%
P1 98.0% 99.7% 79.0% 98.9% 91.8% 99.8% 89.6% 99.5%
P2 96.6% 100% 79.0% 99.9% - - 87.8% 99.9%
After the false alarm reducing process, one can see in Table 4.13 that the precision in all
videos has been improved to 0.9 and 1. In the meanwhile, the precision is enhanced by nearly
0.5 while the detection rate is only decreased less than 0.03. The computation times are
reported in Table 4.14, where P combining the false alarm reducing method with
transformation 3. As shown in Table 4.14, with the proposed false alarms reducing method
the computation time are only be increased by 1 second through the three videos, which is
about 0.01 second per frame.
Table 4.14: The computation time(s) of T3 and reducing false alarm method.
Video Frame Number T3 P
S1 126 105.14 106.94
M1 90 71.48 72.57
41
4.6 Experiment 4 – Face Detection in Synthetic Scene
In order to show how the proposed methods can work under different situations in an
efficient way, we build a synthetic scene by Autodesk MAYA for our experiments. With
MAYA we construct a scene containing 21 people and a camera. These virtual people are
positioned in three rows and spaced equally by one meter. Besides, we set the distance
between the camera and the person in the middle of the first row to 2.5 meters. An example of
these settings is shown in Figure 4.14 and some images captured by the camera are shown in
Figure 4.15.
(a) (b)
Figure 4.14: The environment of synthetic scene. (a) An aerial image of the synthetic scene. (b) A side view of the synthetic scene with camera at 3 meters height and 40 degree angle of depression.
(a) (b)
42 (a)
(b)
Figure 4.16: The detection rates of different transformations by different camera settings. (a) The detection rates from different transformations according to varying camera heights. (b) The detection rates from different transformations according to varying camera angles.
43 (a)
(b)
Figure 4.17: The detection rates of different face detection methods by different camera settings. (a) The detection rates from different face detection methods according to varying camera heights. (b) The detection rates from different face detection methods according to varying camera angles.
44
Because of the clean background with which no false alarm occurs in our experiment, we
only focus on the detection rate (recall) in the following. In this experiment we have five
heights, from 2m to 6m, and nine tilt angles, from , in the camera settings. The detection rates are plotted in Figure 4.16. In Figure 4.16(a), we show the detection rates with
different camera heights across all camera angles. In Figure 4.16 (b), conversely we show the
detection rates with different camera angles across all heights. Throughout the experiments
we see that best face detection result is obtained with transformation 3; the second is with
transformation 2; the third is with transformation 1; and with the original images we have the
worse result. We also add the detection result with the image rotation method introduced in
Section 4.3 for comparison which is shown in Figure 4.17. From it we can conclude that
transformation 3 is more suitable than all the rest methods in the common surveillance
45
Chapter 5
Conclusions and Future Works
In this chapter we give our conclusions of this thesis in Section 5.1 and some future
works in Section 5.2.
5.1 Conclusions
In this thesis we propose a novel method to improve face detection in a practical
condition with vanishing point-based image rectification. Our approach requires only the
position of the vanishing point of vertical lines or two vertical lines marked by the user.
Compare with the simple image rotation method, our method gives better results and requires
much less computational resource. For better detection performance, we further propose a
method for reducing false alarms by skin analysis. This method significantly decreases false
alarms and only causes negligible additional computation time. Through the proposed
framework, the face detection performance is significantly improved for common surveillance
camera installation.
5.2 Future Works
In our future works, a detection scheme which is more suitable for image rectified by the
proposed method is considered. For example, since the lower part of the rectified image is
generally enlarged, the minimal detection window could be set larger around there for better
efficiency. On the other hand, how to properly adopt a multi-view face model for face
detection is also considered. By these works, the integrity of the detection method can be
46
References
[1] Y. Ishii, H. Hongo, K. Yamamoto and Y. Niwa, "Face and head detection for a real-time
surveillance system," in Proc. International Conference on Pattern Recognition, vol.3,
pp.298-301, Aug. 2004.
[2] O. Arandjelovic and Roberto Cipolla, "An illumination invariant face recognition system
for access control using video," in Proc. British Machine Vision Conference, 2004.
[3] Lloyd A. B. Louw, "Automated face detection and recognition for a login system," M.S.
thesis, Dept. Science of Engineering, University of Stellenbosch, 2007.
[4] D.G. Lowe, "Object recognition from local scale-invariant features," in Proc. IEEE
International Conference on Computer Vision, vol.2, pp.1150-1157, 1999.
[5] M.F. Tappen, W.T. Freeman and E.H. Adelson, "Recovering intrinsic images from a
single image," IEEE Transactions on Pattern Analysis and Machine Intelligence, vol.27,
no.9, pp.1459-1472, Sept. 2005.
[6] I. Kemelmacher-Shlizerman and R. Basri, "3D Face Reconstruction from a Single Image
Using a Single Reference Face Shape," IEEE Transactions on Pattern Analysis and
Machine Intelligence, vol.33, no.2, pp.394-405, Feb. 2011.
[7] G. Fangi, G. Gagliardini and E.S. Malinverni, "Photointerpretation and small scale
stereoplotting with digitally rectified photographs with geometrical constraints,"
International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, pp. 160-167, 2001.
[8] F. Schaffalitzky and A. Zisserman, "Planar grouping for automatic detection of
vanishing lines and points," Image and Vision Computing, vol. 18, pp. 647-658, 2000.
[9] O. Chum and J. Matas, "Planar affine rectification from change of scale," in Proc. Asian
Conference on Computer Vision, Springer Berlin Heidelberg, pp. 347-360, 2011.
47
spectral analysis on the unit sphere," Pattern Recognition, vol. 35, no. 10, pp. 2141-2163,
2002.
[11] A.P. Witkin, "Recovering surface shape and orientation from texture," Artificial
intelligence, vol. 17, pp. 17-45, 1981.
[12] C. Rasmussen, "Texture-based vanishing point voting for road shape estimation," in
Proceedings of the British Machine Vision Conference, 2004.
[13] P. Viola and M. Jones, "Rapid object detection using a boosted cascade of simple
features," in Proc. IEEE International Conference on Computer Vision and Pattern
Recognition, vol.1, pp.511-518, 2001.
[14] B. Wu, H. Ai, C. Huang and S. Lao, "Fast rotation invariant multi-view face detection
based on real Adaboost," in Proc. IEEE International Conference on Automatic Face
and Gesture Recognition, pp.79-84, May 2004.
[15] C. Huang, H. Ai, Y. Li and S. Lao, "Vector boosting for rotation invariant multi-view
face detection," in Proc. IEEE International Conference on Computer Vision, vol.1,
pp.446-453, Oct. 2005.
[16] C. Garcia, G. Zikos and G. Tziritas, "Face detection in color images using wavelet
packet analysis," in Proc. International Conference on Multimedia Computing and
Systems, vol.1, pp.703-708, Jul. 1999.
[17] R. Lienhart, A. Kuranov and V. Pisarevsky, "Empirical analysis of detection cascades of
boosted classifiers for rapid object detection," Pattern Recognition, Springer Berlin
Heidelberg, pp.297-304, 2003.
[18] S. Milborrow, J. Morkel and F. Nicolls, "The muct landmarked face database," Pattern


![Figure 3.1: Skin color region define by [16] at Y = 110 and Y = 140. (a) YCbCr plane at different Y value](https://thumb-ap.123doks.com/thumbv2/9libinfo/8461096.183176/27.892.178.742.345.1075/figure-skin-color-region-define-ycbcr-plane-different.webp)
