高均流和快速線性穩壓技術應用於交錯式電源轉換器之晶片設計與實現
114
0
0
全文
(2) 高均流和快速線性穩壓技術應用於 交錯式電源轉換器之晶片設計與實現 Current Balance and Fast Line Regulation Skills in the Interleaved Power Converter. 研 究 生:劉兆軒. Student:Chao-Hsuan Liu. 指導教授:陳科宏/陳紹基 博士. Advisor:Dr. Ke-Horng Chen Dr. Sau-Gee Chen. 國 立 交 通 大 學. 電機學院 電子與光電學程 碩 士 論 文 A Thesis Submitted to College of Electrical and Computer Engineering National Chiao Tung University in partial Fulfillment of the Requirements for the Degree of Master of Science in Electronics and Electro-Optical Engineering June 2007 Hsinchu, Taiwan, Republic of China. 中華民國九十六年六月 ii.
(3) 高均流和快速線性穩壓技術應用於 交錯式電源轉換器之晶片設計與實現. 研究生: 劉兆軒. 指導教授: 陳科宏博士/陳紹基博士. 國立交通大學 電機學院 電子與光電學程碩士班. 摘. 要. 應用在交錯式電源轉換器上的均流技術有分傳統的電壓下降法和主動 均流法,這些方法都會存在一些缺點值得我們注意。傳統的斜率控制法會 受限於可允許的工作電壓範圍,主動均流法是利用共用匯流排的技術作為 每個相位之間電流資訊傳遞的媒介,但卻往往需要一個額外的接腳。除此 之外,傳統的斜率控制法常使用外加電阻的方式來實現均流,卻會因為電 流通過電阻而產生 I2R 的功率耗損,並不適用於大電流的操作情況。 本論文將針對上述的缺點,實現一改進的均流方式應用在交錯式電源 轉換器上,此方式採用電晶體感測電流的方法取代原先串接電阻來感測電 流的方法,藉此降低功率的消耗。改進的均流法是將兩兩項位所感測到的 電流相減,將所得到的差值配合主僕式的控制法達成高均流的目的。至於 線性穩壓的部份,將有別於傳統利用電流控制法的方式,而是採用隨著輸 入電壓的改變動態調整三角波的斜率,進而快速調整每一模組的工作週期 以達到快速線性穩壓的目的。最後將會提到內建式的測試調整電路,其目 的是希望在晶片製造後能將有誤差的電路去作調整,將有問題的電路去作 取代,並且能方便且快速獲得晶片的量測資訊。 整個電路是採用台積電點三五微米 CMOS 製程來進行模擬與佈局,模 擬結果可以驗證使用改良後的均流法跟線性穩壓方式應用在交錯式電源轉 換器上,將可達到高均流且快速穩壓的目的。. iii.
(4) Precise Current Balance and Fast Line Regulation Skills in the Interleaved Power Converter Implementation. Student: Chao-Hsuan Liu. Advisor: Dr. Ke-Horng Chen Dr. Sau-Gee Chen. Degree Program of Electrical and Computer Enginering National Chiao-Tung University ABSTRACT The current balance skills applied to the interleaved power converter are classified into traditional droop method and active current-sharing method. There are some disadvantages worth noticing in these methods. The traditional method, droop method, is restricted by permissible working voltage range. However, the active current-sharing method regards the technology, sharing bus, as transmission media of the current information between each phase, but it always needs an extra pin. Moreover, the traditional droop method carries out current balance by using additional resistance, but it leads to the power consumption of I2R due to the current flowing through the resistance. So that it is not appropriate for the operating situation of high current. This thesis aims at above-mentioned shortcomings to realize an improved current balance technique to apply in interleaved power converter. Instead of resistant connection, the method adopts the detecting current way of the electric crystal to reduce the power consumption. The improved current balance is the difference of current between each two phases cooperating with master-slave control method to achieve precise current balance. As for the line regulation, which is distinct from the traditional way of current control, dynamically regulates the saw-tooth slope according to the variation of input voltage and further gets fast line regulation by regulating the duty cycle of each module in high speed. Finally, the embedded testing-tuning circuit that is expected to effectively improve the accuracy of the circuits reduces the influence due to the process imperfection to obtain the measuring data of chips conveniently. The proposed circuit is fabricated by TSMC (Taiwan Semiconductor Manufacturing Company) 0.35-micron CMOS process. Simulation results demonstrate the performance of the improved current balance method. Besides, it also achieves precise current balance and fast line regulation for the interleaved power converters. iv.
(5) 誌謝 能夠完成本論文首先我要向我的指導教授 陳科宏博士及陳紹基博士 致上萬分的感謝,在我三年多來的學習以及研究過程中,老師熱心的教導, 讓我獲益良多。 感謝 802 低功率混合訊號晶片設計實驗室同學及學弟 耀德、伯欽、哲 偉、德賢、雄哥、宏瑋、杰青、君晏、顯章、永昇、鈞元、孫槿、岳璋、 銘勝、鴻源、豐煜、玉惠、立家、奐箴、文毅。 感謝我的偉大父母,使我能夠順利完成碩士學位,也感謝我的兄弟及 朋友們 大弟、小弟、榮明、昀澤、實林、郁婷、在這段艱苦的日子裡能陪 伴我度過。 最後,謹以此篇獻給所以在關心我的人。. v.
(6) 目錄 誌謝 .............................................................................................. v 目錄 ............................................................................................. vi 圖示 ............................................................................................. ix 表列 ............................................................................................ xii 第一章 .......................................................................................... 1 概論 .............................................................................................. 1 1.1. 研究背景 ............................................................................................................1 1.1.1 介紹切換式轉換器 ............................................................................ 1 1.1.2 工業導向 ............................................................................................ 2 1.1.3 線性轉換器(Linear Converter) .................................................... 2 1.1.4 介紹同步切換式穩壓器(Synchronous Switching Converter)...... 3 1.1.5 介紹並聯式的電源供應器 ................................................................ 4 1.1.6 介紹交錯式電源供應器 .................................................................... 5 1.2 研究動機及目的 ................................................................................................5 1.3 論文大綱 ............................................................................................................7. 第二章 .......................................................................................... 8 應用在交錯式直流-直流轉換器相關技術的回顧 ..................... 8 2.1. 降壓式轉換器的基本架構原理 ........................................................................8 2.1.1 連續導通模式之分析 ............................................................................. 9 2.1.2 不連續導通模式之分析 ....................................................................... 13 2.2 電流感測(Current Sensing)的方式 ............................................................15 2.2.1 電阻型感測電路 .................................................................................. 15 2.2.2 濾波器型感測電路 .............................................................................. 19 2.2.3 電晶體感應型感測電路 ...................................................................... 20 2.2.3 其他類型感測電路 .............................................................................. 22 2.3 電壓控制模式(Voltage Mode Control)................................................................23 vi.
(7) 2.3.1 TYPEII 電壓補償電路.......................................................................... 23 2.3.2 TYPEIII 電壓補償電路 .................................................................... 24 2.3.3 電壓前饋控制(Voltage Feed-Forward Control) ............................ 25 2.4 電流控制模式(Current Mode Control) ...............................................................26 2.4.1 磁滯電流控制(Hysteresis Current Control)................................... 26 2.4.2 峰值電流控制(Peak Current Control) ........................................... 28 2.4.3 平均電流控制(Average Current Control) ...................................... 29. 第三章 ........................................................................................ 31 改良式的均流、線性穩壓和內建測試調整電路的方式......... 31 3.1 傳統均流方式的分析、應用和缺點 .......................................................................31 3.1.1 電壓下降法(Voltage Droop Method).............................................. 31 3.1.2 主動均流法(Active Current-Sharing)............................................. 33 3.2 改良式均流方式的建製 ...........................................................................................34 3.2.1 原理分析 .............................................................................................. 35 3.2.1 比較及闡述 .......................................................................................... 36 3.3 改良線性穩壓的方式 ...............................................................................................38 3.4 內建測試調整電路 ...................................................................................................40 3.4.1 想法及目的 .......................................................................................... 40 3.4.2 原理、原則及分類 .............................................................................. 41. 第四章 ........................................................................................ 42 整體系統電路架構介紹 ............................................................ 42 4.1 系統部份(System Block) ......................................................................................42 4.2 PWM 控制器及功率電晶體部份 ..............................................................................44 4.3 電流感測和取樣保存部份 .......................................................................................46 4.4 均流和誤差控制信號處理部份 ...............................................................................47 4.5 連接及分壓電路(Glue and Bias) ........................................................................48 4.5 電壓量測電路(Voltage Meter).............................................................................49. 第五章 ........................................................................................ 51 電路設計、分析、實現及模擬結果......................................... 51 5.1 制定規格(Define Specifications) .........................................................................51 5.1.1 規格驗證 .............................................................................................. 51 5.2 系統分析(System Analysis)..................................................................................52 vii.
(8) 5.2.1 調幅器(Modulator) .............................................................................. 53 5.2.2 輸出濾波器(Output Filter) ............................................................. 53 5.2.3 取樣電路(Sampling Network)........................................................ 54 5.2.4 輸出 RLC 濾波系統(Output RLC Filter System) ........................... 54 5.2.5 TYPEIII 誤差放大器設計(TYPEIII EA Design) ............................ 56 5.3 偏壓電路設計 ...........................................................................................................59 5.3.1 傳統固定轉導偏壓電路(Traditional Constant gm Bias Circuit)... 59 5.3.2 寬擺幅電流鏡(Wide Swing Current Mirror).................................. 60 5.3.3 寬擺幅固定轉導偏壓電路 .................................................................. 63 5.3.4 寬擺幅固定轉導偏壓電路模擬 .......................................................... 63 5.4 帶差參考電壓源電路(BANDGAP) .....................................................................66 5.4.1 原理分析 .............................................................................................. 67 5.4.2 帶差參考電路模擬 .............................................................................. 68 5.5 三角波產生器(Saw-Tooth) ..................................................................................71 5.6 時脈產生器(Clock Generator).............................................................................74 5.7 電流感測電路 ...........................................................................................................77 5.8 取樣保存電路 ...........................................................................................................79 5.9 均流處理器電路 .......................................................................................................81 5.9.1 電壓誤差信號鏡像電路 ...................................................................... 82 5.9.2 均流誤差處理電路 .............................................................................. 83 5.10 內建測試調整電路 .................................................................................................85 5.10.1 如何啟動 ETTC 模式........................................................................ 85 5.10.2 模式種類選擇解碼電路 ..................................................................... 86 5.10.3 電壓量測模式電路 ............................................................................. 87 5.10.4 元件取代模式電路 ............................................................................ 90 5.10.5 電路調整模式電路 ............................................................................. 92 5.11 系統電路模擬結果 .................................................................................................94 5.11.1 負載穩壓模擬結果 ............................................................................. 95 5.11.2 線性穩壓模擬結果 ............................................................................. 97 5.11.3 改良式均流法模擬結果 ..................................................................... 98. 第六章 ...................................................................................... 100 結論與未來方向 ...................................................................... 100 6.1 結論 ........................................................................................................ 100 6.2 未來研究方向 ........................................................................................ 100. 參考文獻 .................................................................................. 101 viii.
(9) 圖示 圖 1 並聯式穩壓器................................................................................................................................................ 3 圖 2 並聯式電源供應器........................................................................................................................................ 4 圖 3 降壓式轉換器基本架構................................................................................................................................ 9 圖 4 基本的降壓式直流轉換器.......................................................................................................................... 10 圖 5 功率開關 Q 在導通時之等效電路. ............................................................................................................ 10 圖 6 功率開關 Q 在截止時之等效電路. ............................................................................................................ 11 圖 7 降壓轉換器在不連續倒通之等效電路...................................................................................................... 14 圖 8 降壓轉換器在不連續導通之等效電路...................................................................................................... 15 圖 13 積分型電流感測電路 ............................................................................................................................... 22 圖 14 混合型電流感測電路 ............................................................................................................................... 23 圖 15 TYPEII 補償的電壓控制模式................................................................................................................... 24 圖 16 TYPEIII 補償的電壓控制模式 ................................................................................................................. 25 圖 17 電壓前饋控制波型圖 ............................................................................................................................... 26 圖 18 磁滯電流控制 ........................................................................................................................................... 27 圖 19 峰值電流控制 ........................................................................................................................................... 28 圖 20 平均電流控制 ........................................................................................................................................... 30 圖 21(A) 典型電壓下降法的基本原理圖 ........................................................................................................... 32 圖 21(B) 典型電壓下降法的基本原理圖 ........................................................................................................... 32 圖 22 改良式動態均流方式 ............................................................................................................................... 36 圖 23 輸出電壓隨著輸入電壓改變而變化........................................................................................................ 38 圖 24 補償的方式使輸出電壓不會因為輸入電壓的改變而變化 .................................................................... 39 圖 25 放電電流隨著輸入電壓增加而等比例增加的實現電路 ........................................................................ 40 圖 26 整個系統電路方塊圖 ............................................................................................................................... 43 圖 27 PWM 控制器及功率電晶體部份.............................................................................................................. 44 圖 28 系統啟動至穩定間工作週期的變化........................................................................................................ 45 圖 29 電流感測和取樣保存部份........................................................................................................................ 46 圖 30 均流及物差控制信號處理部份................................................................................................................ 48 圖 31 偏壓電路及數位控制信號處理部份 ........................................................................................................ 49 圖 32 電壓量測電路部份 ................................................................................................................................... 50 圖 33 降壓轉換器的基本方塊組成圖................................................................................................................ 53 圖 34 調幅器 ....................................................................................................................................................... 53 圖 35 輸出濾波器 ............................................................................................................................................... 54 圖 36 輸出 RLC 濾波系統電路圖....................................................................................................................... 55 ix.
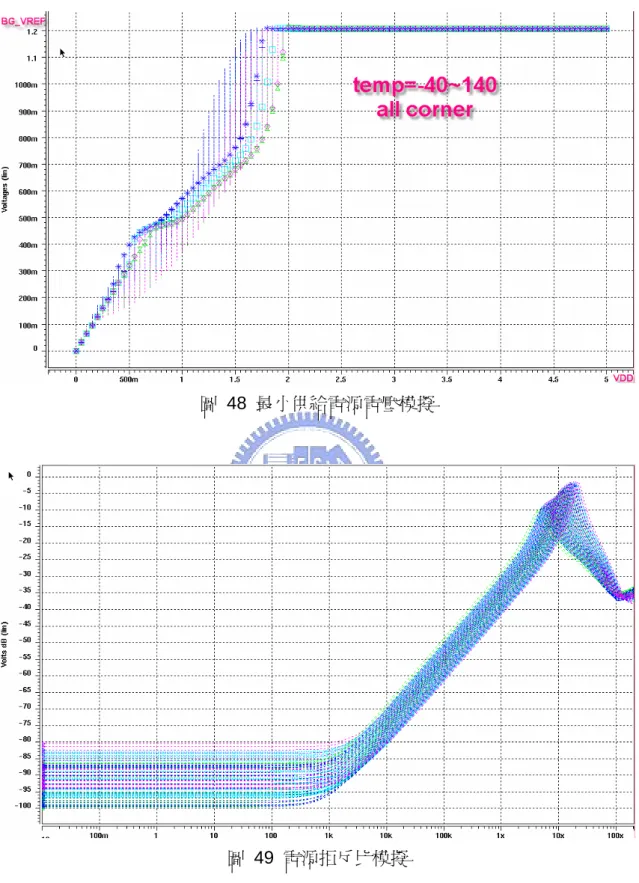
(10) 圖 37 輸出 RLC 濾波增益示意圖及 HSPICE 實際模擬結果 ........................................................................... 55 圖 38 TYPEIII 誤差放大器頻率響應模擬圖...................................................................................................... 57 圖 39 總開迴路增益頻率響應關係設計圖及 HSPICE 模擬圖......................................................................... 58 圖 40 固定轉導偏壓電路 ................................................................................................................................... 59 圖 41 二極體連接形式電晶體偏壓電流鏡電路................................................................................................ 61 圖 42 含寬擺幅電流鏡之固定轉導偏壓電路.................................................................................................... 63 圖 43 寬擺幅偏壓電路模擬結果........................................................................................................................ 65 圖 44 帶差參考電壓電路圖 ............................................................................................................................... 66 圖 45 米勒補償二階運算器(BANDGAP_OP)電路圖........................................................................................ 67 圖 46 運算放大器(BANDGAP_OP)的頻率響應................................................................................................ 69 圖 47 運算放大器(BANDGAP_OP)的頻率響應................................................................................................ 69 圖 48 最小供給電源電壓模擬............................................................................................................................ 70 圖 49 電源拒斥比模擬 ....................................................................................................................................... 70 圖 50 三角波產生器 ........................................................................................................................................... 71 圖 51 三角波產生器電路圖 ............................................................................................................................... 72 圖 52 三角波產生器電路的模擬結果................................................................................................................ 73 圖 53 時脈產生器 ............................................................................................................................................... 75 圖 54 產生相位差 180 度 500KHZ 時脈的電路圖 ........................................................................................... 76 圖 55 產生相位差 180 度 500KHZ 時脈模擬圖 ............................................................................................... 76 圖 56 不同電壓下充放電電流模擬.................................................................................................................... 77 圖 57 電流感測電路模擬結果............................................................................................................................ 79 圖 58 取樣保持電路. .......................................................................................................................................... 80 圖 59 模擬結果. .................................................................................................................................................. 81 圖 60 均流處理器電路 ....................................................................................................................................... 82 圖 61 電流相減電路 ........................................................................................................................................... 84 圖 62 啟動 ETTC 模式........................................................................................................................................ 86 圖 63 模式種類選擇解碼電路............................................................................................................................ 87 圖 64 電壓量測模式整體電路圖........................................................................................................................ 88 圖 65 電壓量測模式半電路圖............................................................................................................................ 89 圖 66 電壓量測模式下--量測時脈信號的波形圖 ............................................................................................. 89 圖 67 電壓量測模式下—量測三角波信號的波形圖........................................................................................ 90 圖 68 元件取代模式—功能選擇解碼電路........................................................................................................ 91 圖 69 元件取代模式相關電路圖........................................................................................................................ 92 圖 70 可調式電阻電路圖. .................................................................................................................................. 93 圖 71 改良式均流及線性穩壓應用在交錯式直流-直流轉換器系統電路圖................................................... 94 圖 72 負載穩壓的模擬結果 ............................................................................................................................... 95 圖 73 負載變化相對於輸出電壓的變化圖........................................................................................................ 96 圖 74 負載電流由 400MA 變化到 1200MA 相對於輸出電壓變化放大圖 ...................................................... 96 圖 75 負載電流由 1200MA 變化到 400MA 相對於輸出電壓變化放大圖 ...................................................... 97 x.
(11) 圖 76 雙相位交錯式轉換器線性穩壓的模擬結果............................................................................................ 98 圖 77 整體電路使用改良式均流法模擬結果 .................................................................................................... 99. xi.
(12) 表列 表格 1 規格和參數(SPECIFICATIONS AND PARAMETERS) .................................................................................. 51 表格 2 規格和參數(SPECIFICATIONS AND PARAMETERS) .................................................................................. 68 表格 3 三角波產生器的模擬數據表 .................................................................................................................. 73 表格 4 時脈產生器的模擬數據表...................................................................................................................... 75 表格 5 電壓量測模式下的功能列表. ................................................................................................................. 88 表格 6 元件取代模式下的功能列表.................................................................................................................. 91 表格 7 電路調整模式下的功能列表. ................................................................................................................. 92. xii.
(13) 第一章 概論 1.1 研究背景 為了比傳統的電壓或電流控制轉換器在載流變化時能有更短的反應時間,我們可以 利用切換的頻率來達到快速反應的目的。但增加切換頻率往往會造成更大的功率消耗, 低轉換效能和縮短電池的壽命。而且在切換時損失的能量會作用在功率電晶體上產生熱 能,降低電晶體的可靠使用性。大的電流輸出往往暗示需要更大的電感體積提供使用, 而大的電感體積將有可能造成使用規格上的不符合。針對目前的一些限制跟一些急需的 要求,必須將電源轉換器作架構上的改善才能滿足。本節將就以前一些交換式電源穩壓 器的演進及操作方式做簡單的介紹。. 1.1.1 介紹切換式轉換器 所謂切換式轉換器就是藉由切換開關功率電晶體的方式,將電壓源轉換成一個較為 穩定的輸出電壓來提供負載,切換式電源穩壓器在 1950 年就已經發表了,但當時由於 需要更先進,可利用性,可靠性的電晶體才可建製,因此限制了它的應用,只用於軍事 及航太方面。直到西元 1970 年,先進製程的開發,於是廣為大家應用在電源供應器上。 直流轉直流的切換式轉換電路是利用動態切換開關的方式來轉換成一穩定的電 源,這些切換式穩壓器應用在高效能的電源供應系統上。 跟線性的穩壓器比較,切換式電源轉換器具有更高的功率轉換效能及提供更高的電 流密度。. 1.
(14) 1.1.2 工業導向 在過去的幾年,直流-直流轉換器的技術已經不斷的革新,且所需提供的電流源的 電壓,也由原本的 5V 降到現今的 1.5V,但在這同時所需要供應的負載電流卻拉高到一 個令人難以想像的地步,一些電力系統,目前需要 2.5V 60A,1.8V 60A,甚至 1V 100A 的電流,接下來的未來,提供的電壓將會朝向 0.5V 邁進,而電流則期望拉高至 400A。 一般的動態要求之於直流-直流切換是穩壓器[2],是希望當副載電流由 75A Æ100 AÆ75 A 時,slew rate 能滿足 100A/ usec 且輸出電壓要小於 60 mV 的誤差值. 在這同時 也必需要在 4us 內達到輸出電壓 + − 1.5V 以內,以上這些要求對於一個提供高電流,低 電壓的電流穩壓器來說是極其困難的事,因此目前的電路設計者正嘗試藉著改變電源供 應器架構的方式來達到低壓高電流的目的。 在 1999 年,所達到的功率密度 25W/in3,at 5V,2001 年時,已達到在 3.3V 下功率 密度為 40W / in3 ,而現在來說功率密度已經達到 40W / in3 以上甚至到達 90W / in3 ,有這 些進步是因為在電磁元件上的持續革新, 才能達到既要增加功率密度又要能提高效能的 目的。 接下來要能大幅度提升轉換的功率效能是直到同步穩壓轉換器的完成後,特別是跟 低壓有關的轉換器結合同不穩壓器及交錯式的技巧,將使得傳統的轉換器可以提升到. 90%的轉換效能,且一般都能到達 85%的轉換效能。 交錯式(interleaved)或多相式(multi phase)轉換器,提供了比單一電力系統轉換器所 沒有的好處,比如說能大幅降低輸出電流的漣波效應,且在負載改變轉換時能有快速的 反應速度,有盡 90%的功率效能。. 1.1.3 線性轉換器(Linear Converter) 以下有兩種的線性的轉換器電路[1]:串聯和並聯兩種,它們唯一的不同在於輸出的 電壓是否有經過穩壓。. (1) 線性串聯式的穩壓器[2]: 2.
(15) 藉由電晶體串聯輸出負載來控制輸出電壓的線性模式。一個誤差放大器來感應直流 輸出電壓,經由取樣電阻 R1,R2 所得的取樣電壓來跟參考電壓( VREF )做比較。誤差 放大器的輸出端接到串聯電晶體(NPN)的閘極端,形成一個電流放大器的架構,輸出 的電壓就是由誤差放大器產生的輸出電壓扣掉電晶體 VGS 的電壓,藉由這種方式來達到 穩定輸出電壓的目的。當輸出的電壓隨著負載電流的減小而增加時,取樣電壓也會相對 的增加,此時誤差放大器的輸出將會減小達到負回授穩壓。. (2) 線性並聯式穩壓器[2]: RS R1. VIN. VOUT. GATE DRIVER R2 GND. GND Reference Voltage. GND. GND. GND. 圖 1 並聯式穩壓器.. 並聯式穩壓器,則在電源輸入端加一個 RS 的串聯電阻,因此輸入電壓如下:. VOUT = VIN − ( I LOAD + I S ) RS. (1). IS 是並聯電流,此並聯式的穩壓器對輸入電壓十分不敏感,且其效能如下: η=. POUT VOUT I LOAD VOUT = = PIN VIN I LOAD VIN. (2). 當 RS 增加或 ILOAD 增加時,會產生很大的功率散逸,造成效能的降低。. 1.1.4 介紹同步切換式穩壓器(Synchronous Switching Converter) 最簡單的直流-直流切換式轉換器電路[1]包含兩個半導體切換元件(一個是切換電 3.
(16) 晶體,一個是切換二極體)一個電感器和一個電容器。同步切換式轉換器則是將原先基 本型的切換 Diode 由一個切換電晶體取代,同步切換式轉換器之於基本型的好處是它可 以免除一個 Diode 的壓降電壓,減少轉換時的功率消耗問題。. 1.1.5 介紹並聯式的電源供應器 傳統上的電源供應器都採用單一的電源模組提供電源給所有的系統使用,但是單一 的電源模組會產生的問題是散熱及功率元件承受大量電流應力問題。因此為了解決這些 問題,往往會將功率元件並連使用,如圖 2 所示,將每個小的電源模組並聯使用,稱 之為分散式的電源系統(Distributed Power System)[2]常應用在電腦 CPU 及通訊系統上。. POWER. PWM controller (1). POWER MOS. PWM controller (1). POWER MOS. PWM controller (1). POWER MOS. LOAD. GND. 圖 2 並聯式電源供應器.. 並聯式電源供應器另一個好處是可以做成 K+A 組單一電源模組並聯的架構,假設 K 組是正常供電的組數,A 組是額外的並聯電源模組,當 K 組電源模組裡面有一組失去供 電的功能時,可以將故障的模組退出供電而由 A 組裡面額外的模組裡面取一組進行置 換,這種架構的好處是可以提高系統的穩定性,電源供應器的耐用性及使用期限。 雖然在並聯式電源供應器使用上有這麼多的好處,但其缺點也是值得我們注意的, 首先是“ 均流(current balance)"的問題,並聯後的單位去提供整體系統的電流,必 須要做到每個模組提供的電流能平均分配,若均流的機制不能做好,其中一個模組承受 4.
(17) 過大的電流,將會嚴重降低此架構的耐用性。其次是“ 輸出電流漣波控制(current ripple. control)"的問題,因為是並聯的結構,每單一元件有其獨立的電源及 PWM 控制系統, 當輸入的電壓改變時,每單一元件的線性穩壓不見得一致,其產生的效應則由線性穩壓 控制最差的模組來決定,此外每個元件為獨立的系統,輸出的電流漣波並沒有達到抑制 的效果,總體的輸出電流漣波的表現,也會由最差的模組來決定。. 1.1.6 介紹交錯式電源供應器 吸收並聯式的電源供應器的優點,並針對其缺點部分去改進,提出了多相式 (Multi-Phase)或是交錯式(Interleaved)的電源供應器。本文以後提及此類的電源供 應器統一都稱為“ 交錯式(Interleaved)"電源供應器。 交錯式電源供應器的優點是:可以達到快速反應(fast transient response)及高頻操 作(high-frequency operation)的目的。 此外交錯式電源供應器還具有一項優點,那就是電流漣波抵銷的特性(current ripple. cancellation characteristic),就能量的消耗觀點來分析,在交錯式的控制下,每一個相 位的單一電源模組將可以操作在較低頻的情形下,因此在切換耗能(switching loss)上 將會比高頻操作要相對少很多,這也是相較於並聯式電源供應器的另一項好處。其次是 並聯式電源供應器有“ 輸出電流漣波控制(current ripple control)"的問題,因為是並 聯的結構,每單一相位有其獨立的電源及 PWM 控制系統,當輸入的電壓改變時,每個 別相位的線性穩壓不見得一致,所以其產生的效應則由線性穩壓控制最差的模組來決 定,此外每個元件為獨立的系統,輸出的電流漣波並沒有達到抑制的效果,總體的輸出 漣波的表現,也會由最差的模組來決定。. 1.2 研究動機及目的 目前應用在交錯式轉換器上均流的機制,大致分斜率控制法(Droop Method)和主 動式均流法(Active Current-Sharing Method)傳統的斜率控制法會受限於系統的工作電 5.
(18) 壓關係,使其斜率無法提高,而主動式均流法利用分享排線(Sharing Bus)的技術,會 造成一個缺點,就是需要一個額外的接腳去接收個別模組的電流資訊,以上的這些方式 都需要額外的電阻作為電流偵測的媒介,這些感測電阻往往會造成多餘功率消耗的問 題。因此本篇論文採用電晶體感應型電流感測電路,去感測電感前端電壓的方式,來獲 得個各相位轉換器的電流資訊,此方法的功率的消耗相對於感應電阻的方式會小很多, 另外只需利用簡單的延遲取樣技術,配合最短的回授路徑,來達到防止取樣訊號失真, 更精確均流控制的目的。 線性穩壓(Line Regulation)部份,也是交錯式轉換器關注的部份,傳統轉換器在 線性穩壓的功能部份是採用電流控制補償技術(Current Mode Control),內建在每一個 單一模組裡面,本文採用將輸入電壓變化的誤差資訊,直接提前在三角波產生器時去做 線性穩壓補償的動作,如此可以使輸出電壓受到輸入電壓的影響降到最低,而且相較於 電流補償的技術有更快的反應時間。 除此之外,本文還提出“內建測試調整電路" ( Embedded Testing and Tuning. Circuit)的方式,簡稱 ETTC。其目的是希望晶片製程完成後,原先製程製造上的誤差 可以利用 “調整電路"來修正使其精確,至於內建的“測試模組電路",則是希望能 在快速的時間內得到 IC 一些相關的重要資訊,內部元件有錯誤失效的部分能利用此電 路達到修補取代該內部元件的動作。 綜合前面的這些想法,建構在交錯式轉換器裡面,是希望能達到簡易建構,精確操 作,且快速偵測修補的目的。. 6.
(19) 1.3 論文大綱 本篇論文分五個章節來驗證,分析和討論所提出的架構概念和想法。各章節的標題 及內容簡述如下: 第一章 概論 : 旨在說明論文的研究背景,研究動機及目的。 第二章 應用在交錯式直流-直流轉換器相關技術的回顧。 第三章 改良式均流,線性穩壓,及內建測試調整電路的方法,應用在交錯式直流直流轉換器上。 第四章 整體系統電路架構介紹。 第五章 電路架構及電路的實現及模擬:針對之前提出改良式交錯式直流-直流轉換 器的想法,實際實現在電路上,並對該電路去模擬及驗證。 第六章 結論及未來展望:對提出的論文做個總結及說明未來可改進的部份。. 7.
(20) 第二章 應用在交錯式直流-直流轉換器相關技術 的回顧 就我們所知交錯式直流-直流轉換器經常使用在多組降壓電路(buck converter)上, 因此在分析所改進之均流、線性穩壓及測試調整原理或接下來章節有關電路實現模擬 時,決定都在交錯式直流-直流降壓式轉換器(Multi-Phase DC-DC buck converter)的基 礎架構上去討論及實踐,其原因是結構簡易,單純,更能突顯改進部分之於原來電路的 優勢跟好處。為了讓大家對交錯式直流-直流降壓轉換器有更進一步的認識,第二章將 從降壓轉換器的基本架構原理開始介紹起,接著為了均流設計跟電路保護裝置,我們將 回顧一些電流感測技術(current sensing),最後為了使電路能穩定,必需要有負回授機 制,因此提出電壓及電流回授控制模式文獻回顧作為參考。. 2.1 降壓式轉換器的基本架構原理 在提及交錯式直流-直流降壓式轉換器(Interleaved DC-DC buck converter)前,我 希望從單一相位的降壓式轉換器開始分析,一步步去建構實現我們所要的電路。 降壓式轉換器是最基本的電源轉換器[1],圖 3 為降壓式轉換器最基本的架構。由 一個功率電晶體 Q,一個二極體 D,及 LC 濾波器與負載所組成。Q 和 D 是擔任開關的 工作。 當 Q 導通時輸入電壓 VI 將會提供電源至負載,此時電流就會順向地流經電感,使 電感上的電流增加,電流不是瞬間流過電感,而是呈現線性的增加,二極體的負端電壓 約為 VI,因此呈現逆向偏壓狀態,輸出電容 C 會被充電。. 8.
(21) L Q VI. C. D. VO. 圖 3 降壓式轉換器基本架構. 若電晶體 Q 呈現截止狀況時,電感所儲存的磁場將被釋放,為了達到平衡,電感器. L 本身的極性也會被反轉,此時二極體的負端電壓將變為負,所以 D 為順向導通的操作 模式,原來在電容 C 中所儲存的能量,便經由電感釋放到負載上,電感的磁場呈現衰退, 此時輸出電壓的極性仍相同,在此電路之中如果沒有這個二極體的迴路,儲存在電感器 上的能量就沒有路徑可以釋放出來,瞬間 di/dt 的作用會產生很大的電壓尖波(voltage. spike),使相連接的功率元件遭到破壞。 降 壓 式 轉 換 器 操 作 的 情 形 主 要 是 依 照 電 感 L 上 所 儲 存 的 磁 通 交 連 ( Flux. Linkage=[Vi-Vo]DTs)與復原之磁通交連(=Vo[1-D]Ts)之關係,來決定電感上電流的導 通模式,我們一般根據電感上電流大於零與等於零,區分為連續導通模式(CCM Mode). [1]與不連續導通模式(DCM Mode)[1],以下是對這兩種模式的分析。. 2.1.1 連續導通模式之分析 連續導通模式(Continuous-Conduction Mode,CCM): 要呈現連續導通模式,最簡單的解釋就是電感器的電流無論何時都保持不小於 0 的 狀態,又稱之為重負載模式(Heavy Load Mode)。. [VI − VO ]DTS = VO [1 − D]TS. (3). 一般都操作在連續導通模式(CCM)可以獲得較好的輸出性能。 由於轉換器在連續導通模式(CCM)所以流經電感器的電流並不會降為零,因 此 在每個交換週期裡僅有兩個操作狀態,第一個狀態是電晶體 Q 在導通期間,電感器之電. 9.
(22) 流 I L 會從初始值(大於零)增至最高值。第二種狀態就是 Q 在截止期間,負載在電感 提供之能量得以補充,在導通模式圖 5 之電路圖可知,其電感兩端的電壓為:. VL (t ) = VL ( on ) = VI − VO. (4). L DTS VI. Q C. D. VO. TS 圖 4 基本的降壓式直流轉換器.. VL (on). IL. VI. C. 圖 5 功率開關 Q 在導通時之等效電路.. 10. Vo.
(23) VL (on). IL. VI. C. Vo. 圖 6 功率開關 Q 在截止時之等效電路. 流經電感器的電流為 ( 0 ≤ t ≤ DTS ) 1 t VL (t )dt L ∫DTs 1 t = iL (0) + ∫ VL ( on )VL ( on ) L 0 1 = iL (0) + VL ( on )t L 1 = iL (0) + (VI − VO )t L. iL (t ) = iL (0) +. (5). 在 t = tON = DTS 時,由(5)式可得. iL ( DTS ) = iL (0) +. 1 (VI − VO ) DTS L. (6). 第二個狀態是功率電晶體 Q 在截止期間。此時電感上的電壓瞬間反轉,此時二極體 導通,電感上的能量將提供至負載端,其電流會慢慢衰減至原來初始的值。所以 Q 截止 時,由圖 6 可得電感上兩端的電壓為:. VL (t ) = VL (OFF ) = VI − VO 此時流經電感器的電感電流為( DTS ≤ t ≤ TS ). 11. (7).
(24) 1 t VL (t )dt L ∫DTs 1 t = iL ( DTS ) + ∫ (−VL (OFF ) )dt L DTs 1 = iL ( DTS ) + (−VL (OFF ) (t − DTS ) L 1 = iL ( DTS ) + (−VO )(t − DTS ) L. iL (t ) = iL ( DTS ) +. (8). 當 t = TS 時由(8)式可知. iL (TS ) = iL ( DTS ) +. 1 (−VO )(1 − D)TS L. (9). 在轉換器穩態時,由(6)與(9)式可得. iL (TS ) = iL (0) +. 1 1 (VI − VO ) DTS + (−VO )(1 − D)TS L L. (10). 因此. (VI − VO ) DTS = VO (1 − D)TS. (11). VL (ON ) DTS = VL (OFF ) (1 − D)TS. (12). 即. 由上式可看出這就是電晶體 Q 導通和截止期間,電感器達到電壓 - 時間之平衡 (voltage-second balance)整理一下上式得到輸出與輸入的關係如下. VO T = D = ON VI TS. (13). 由上式可得知一個重要的觀念,這個觀念將廣泛應用到這篇論文之中。就是輸入電 壓 VI 和工作周期 D 成反比,換句話說,就是當輸入電壓有所變動時,可以改變工作週期 來補償,此時輸出的電壓就可保持一恆定性,進一步思考就是藉由這種補償方式可以使 得轉換器維持很高的線性穩壓(Line Regulation)。 此外,亦可知輸出電壓 VO 和工作周期 D 成正比,因此輸出如果當接收到重負載, 使得輸出電壓下降時,則負回授電路便負責感受其電壓降,然後增加其工作週期,式輸 出電壓回復至原本恆定之值。這回授相關的現象就是負載穩壓 (Load Regulation)。 此種回授的過程方式,並不會造成轉換器內部的功率消耗,這是交換式電源轉換器 12.
(25) 能夠操作在極高效率的原因。 若假設功率的轉換沒任何能量損失,則. PI = PO => VI I I = VO I O. (14). I O VI 1 = = I I VO D. (15). 所以. 2.1.2 不連續導通模式之分析 不連續導通模式(Discontinuous-Conduction Mode:DCM): 此模式下電感器的電流會有沒電流的情況,也就是說電感電流的最小值會有降到為 零而行成不連續的情形,此種模式亦稱之為輕載模式(Light Load Mode)。等效電路如 下圖 7: 由圖 7(c)可得. D1 + D2 ≤ 1 D1 + D2 + D3 = 1. (VI − VO ) D1TS = VO D2TS. (16). 由(16)式得到輸出與輸入電壓的關係. VO D1 = VI D2 + D3. (17). 並可求 D1 和 D2 的關係及電感值 L 為 L=. D2 + ( D1 + D2 )VOTS 2IO − D1 + D1 +. D2 =. 2. 13. 8L RTs. (18).
(26) VL (on). L Vi. IL. Vo. C. (a) Q導通, D截止. VL (on) IL. L Vi. Vo. C. (b) Q截止, D導通. L IL. Vi. C. (c) Q截止, D截止 圖 7 降壓轉換器在不連續倒通之等效電路.. 14. Vo.
(27) 2.2 電流感測(Current Sensing)的方式 電流感測技術的主要用途是去偵測某些元件或某條線路上的電流,其目的在當偵測 電流超過某個限度,則運用一些方法或控制機制,降低電流以保護電路。通常會去量測 元件的兩端電壓,此電壓一定跟待測電流有一定的關係,或是串接一小電阻的方式,利 用在電阻上,電壓和電流呈線性正比關係,來得知電流的變化.電流感測的方式的不同, 除了有精確度的不同外,還會嚴重影響到整體電路的功率效益.以下是之前各種電路型態 下的電流感測技術:. 2.2.1 電阻型感測電路. VIN M1. Vsense L. Vctrl. RS. C. M2. Rl. 圖 8 降壓轉換器在不連續導通之等效電路.. 顧名思義,電阻型的感測電路就是在要測量的線路上串聯一個電阻,依照歐姆定 律,電阻的電壓跟電流成正比的特性,電流感測技術的主要用途是去偵測某些元件或某 條線路上的電流,其目的在當偵測電流超過某個限度,則運用一些方法或控制機制,降 15.
(28) 低電流以保護電路. 通常會去量測元件的兩端電壓,如圖 8 所示[4]: 圖中 Vin 是輸入電壓, Vctrl 為控制電壓,通常都是週期性的方波訊號,來決定 M1 和 M2 的開關,R1 是負載電阻,C 是負載電容 L 是電感,RS 是感測電阻,藉由量測電壓. VSENSE 的大小來得到輸出的電流變化。 這個電路的優點是結構簡單,而且感測的變化絕對正確,只要歐姆定律成立之下, 因此就純粹電流感測的觀點來看是非常完美的. 但是它卻有一個嚴重的缺就是,電阻本 身串聯會消耗功率,造成浪費及使電路的效率降低。尤其是目前電源提供電壓要求往下 降的同時,雖然此感測電阻消耗的功率會降低,但想對於總體功率消耗會提高很多。 考慮到電阻消耗功率,因此改用電晶體的內電阻來代替之前的感測電阻,電路如圖. 9 所示:. Vin M1 Vsense L. Vctrl. C. M2. RO. 圖 9 以電晶體來取代電阻的電阻型電流感測電路.. 同樣的電流由 VIN 輸入,由 RO 流出,和圖 8 不同處再將 RS 拿掉,利用電晶體 M1 的內等效電阻來擔任感測電阻.. 16.
(29) i=. V 1 W 2 uCOX [2(VGS − Vt )VDS − VDS ] = SENSE 2 L RDS. (19). L WuCOX (VGS − Vt ). (20). 推出 M1 得電阻值 RDS. RDS =. 由上圖及公式,我們可知用 M1 來取代電阻 RS,其優點是的確可以讓電路幾乎沒有 應用在感測電流上的消耗,但 M1 電晶體受到 VCTL 控制,時開時關,當 M1 被打開時,所 感測量測到的電流便是電感電流,可是當 M1 被關閉時,所量測到的電流就是一個不正 確的值,因此只有在輸入電壓的正半週期(在一個週期之內 M1 導通,電流從 VIN 流入的 時間)有正確的電流感測值,這是採用電晶體去代電阻的缺點,電晶體電阻很容易受到 環境影響而改變其大小,最明顯的事隨溫度上升,RDS 也會跟著改變,通常適合用在簡 單且粗略的控制上,不容易出錯,且省電。 接下來為了同時兼顧正確和省電,於是乎發展出位電流感測電路量身打造的電阻就 被發展出來了[5],利用最新的技術將感測電阻的電阻值縮小到達 mΩ 的大小,此時功率 的消耗將被壓到非常低的地步,如此便是利用製程的技術去滿足正確性及低功耗性的要 求,但馬上會遇到一個問題,就是電阻值非常低,即使流經的電流有數安培之大,所感 測出來的電壓值還是 mV 的大小,電壓變化將會低得無法察覺不說,甚至還很容易被雜 訊干擾,因而必須要將所產生的感測電壓放大,讓控制電路能分辨電壓上的明顯變化, 來達成對電路的控制。 要放大電壓,最直觀的方法就是使用放大器將電阻上的感測電壓放大[6],如圖 10 所示:. 17.
(30) VIN M1 RS. L Vctrl Ra. M2. C1. RL. I. M3 Vsense Rb. 圖 10 使用放大器的電阻型電流感測電路.. RS 是歐姆值極小的感測電阻,另外還有 Ra 和 Rb ,利用放大器輸入端虛短路的原理, 得到這條路電流 I 為:. I=. I L RS Ra. (21). 由於電流 I 和 I L 的變化成正比,因此將 I 通過一電阻 Rb ,則可以當作我們 VSENSE 的值。. VSENSE =. I L RS Rb Ra. (22). 感測電壓 VSENSE 也和 I L 的變化成正比,只要能適當的調整 Ra 和 Rb 的比例,讓 Rb 的 電阻是 Ra 的 100 倍,則 VSENSE 上所量測的電壓將會比 Rs 上所量測的感測電壓要放大 100 倍,由於 Ra 極大,從只要線路損失的電流也極小,故沒有嚴重的功率消耗,也能保有電 阻型的正確性。. 18.
(31) 2.2.2 濾波器型感測電路 此類型的感測電路是借用濾波器的特性來做電流感測,如圖 11 所示[4]:. VIN. VSENSE M1 Ra. CS. L. RS. Vctrl C. M2. Rl. 圖 11 濾波器型電流感測電路.. 這種感測電路的特色就是在主要的線路上另外並聯一個電阻 Ra 和電容 CS ,淇樣子 就像是濾波器一樣, RS 在此時要是為電感 L 的等效內電阻,從 Ra 和 CS 的電壓 等於 L 和 RS 上的電壓,我們可以得到一個等式:. VSENSE (1 + sRa CS ) = ( RS + sL) I L. (23). 再將此式子移動簡化得到: VSENSE =. 由公式(24)可知,在. ⎡1 + sL / RS ⎤ ( RS + sL) I L = RS I L ⎢ ⎥ 1 + sRa CS ⎣ 1 + sRa CS ⎦. (24). L = Ra CS 的條件成立時,括弧裡面的式子就會被消掉,感測電壓 RS. VSENSE 的變化就會和電感電流 I L 成正比,也就是我們可以從電容 CS 的電壓變化來得知主 要線路上電感 L 的電流變化。這種電流感測的方式也相當準確,並不比電阻型感測電路 差, 布過其困難度就是在元件參數的調配,在使用前要先計算過,不然敢測結果就會有 19.
(32) 誤差。 此感測電路還會遇到一個問題,那就是 L 的內等效電阻 RS 非常小,則感測電壓 VSENSE 的變化會小到幾乎看不出來,讓感測到的電壓毫無用處,因此一樣必須想辦法把感測電 壓放大。. 2.2.3 電晶體感應型感測電路 這是目前比較熱門,比較多人去研究的電流感測電路,其好處是因為裡面的電路都 是由 MOSFET 電晶體組成,製程上可以做到比較小,遠比任何元件都適合放進 IC 裡面, 且所耗的功率也極低,因此可以做到不佔體積又能省電的目的,此電路比較特殊的地方 在於,是用兩顆長寬比(W/L)相差至少 1000 倍的電流,然後用電阻去感測放大,如 圖 12 所示[7][8]: 我們讓電晶體 M1 的長寬比比值比 M2 大上 1000 倍,然後將這兩個電晶體的汲極端 分別接到放大器的輸入兩端(M1 下面多加一個 M3 是為了防止電流逆流)M1 和 M2 的 VSD 會因為放大器須短路的關係而導致相等,如此便導致了流經這兩個電晶體電流的大小與 它們的長寬比有關,換句話說流過 M1 的電流會是 M2 的 1000 倍,利用這種方法我們製 造了一個和我們要測量的電流變化相同,但縮小 1000 倍的電流,讓他往下流透過 M11 在流過感測電阻 RS ,接下來我們只要量測 RS 的電壓值就可了解電流的變化。 這種感測電路的好處是,它是另外製造一個電流作為感測,不會對主要線路上的功 率有任何消耗,而且感測電阻上的電流是主要線路上電流的千分之一倍,因此在感測電 阻上所造成的功率浪費也很小。雖然此電路並不像電阻型或是濾波器行那麼準確。但是 它有相當小的電路面積是一個很大的優點,而且只要選擇適當的 RS 就可以得到想要的 感測電壓大小。. 20.
(33) VIN. IS M2. IL Vctrl. L. M1. IO M10 VIN M3. C. Rl. M4 Vctrl. VIN M6. M5. VSENSE. M11. M7. M8 M9. RS. GND. 圖 12 電晶體感應型電流感測電路. 這種感測方法有兩個缺點:第一就是 M1 和 M2 兩電晶體需要足夠匹配,不然流經兩 者的電流變化不同步或縮小倍率改變了,都會造成感測上的誤差,第二就是當切換電壓. Q 為 high 時,M1 和 M3 會關閉,輸出電流改由 M10 作迴路,在此時由 M2 流出來的電流 就和我們要測量的電流毫無關係了,故這電路只有在 Vctrl 為 low 時才有效,只能測量 電路正半週期的變化。 它是另外製造一個電流作為感測電流值,不會對主要線路上的功率有任何消耗,而 且感測電阻上的電流是主要線路上電流的千分之一倍,因此在感測電阻上所造成的功率 浪費也很小。. 21.
(34) 2.2.3 其他類型感測電路 其它一些電路是比較少人在研究的,第一種型稱之為積分型感測電路,第二種是混 合式的感測電路[9]兩種: 所謂的積分型就是郵電感公式:vdt = Ldi 作為出發點,將兩邊同時積分,會得下式:. i=. 1 vdt L∫. (25). 因此如果想知道電感上的電流變化,就要將電感上的電壓接到積分器去積分再除以 L 即 可得到答案,電路如圖 13 所示:. Integrator. 1/L. VIN. VSENSE M1 L. Vctrl M2. C. R1. 圖 13 積分型電流感測電路 另外再介紹一種混合式的電路,就是將電阻型中的單純使用電阻以及使用電晶體代 替電阻這兩種類型結合起來,用此的原因在於,單純使用電阻感測結果很精準,卻比較 好功率,使用電晶體代替感測電阻的方式雖然量測結果不準確,但是卻可以多省一些 電,因此將這兩種形式結合在一起,平常切換到電晶體體感測電阻,就不會那麼耗電, 隔一段時間後就切換到普通電阻,去幫忙不精確的電晶體電阻去做一個感測校正的工 作,然後再切到省電模式,其電路如圖 14 所示: 22.
(35) VIN Main Control. Main Control. M1 L. Sync Control. Calib Control. C. M2. Rl. RS. Sync Control Calib Control. 圖 14 混合型電流感測電路 由上圖 14 來看,Main Control 和圖 12 的控制電壓 Vctl 是一樣的週期性方波,而 下面則被拆成兩個電晶體 M2 跟 M3,首先由 M2 來看,其控制電壓是 Sync Control,平常 是跟 Vctl 一樣,不過電壓和 Main Control 相反,感測電壓所量測的是上面的電壓,是 利用電晶體代替電阻量測的方式作為電流感測;但每隔幾次週期就會關閉,改由導通, 此時則是用 RS 流作為電流感測的方式。採用交替感測電流的原因是由於使用 M2 來做電 流感測的結果比較不準,但是比較省電,所以會使它的導通次數比較多,但為了避免感 測結果會越來越差,每隔一段時間就會改用 RS 做為電流感測,將感測電壓值校正回來。. 2.3 電壓控制模式(Voltage Mode Control) 在平行並聯的控制之中[1],主要有分電壓控制模式(Voltage Mode Control)與電流 控制模式(Current Mode Control)。在本節中將先介紹電壓控制模式(Voltage Mode. Control)此模式對於切換式電源供應器來說是非常有名且常用的模式。. 2.3.1 TYPEII 電壓補償電路 圖 15 表示一個最基本的降壓式電路加上一個電壓控制模式,輸出電壓經由 R1,. R2 所組成的分壓回授路徑,去取樣輸出電壓的資訊,然後將此資訊跟參考電壓去做比 23.
(36) 較,將處理完的輸出訊號送到比較器去調整脈波寬度 C3,C2 及 R2 是此補償電路的必 要元件。. D1. VO CO. Compensation C2. VIN. GND. RL. L. M1. RC. C1. R2. RO RS 1. EA. Compator. VREF. RS 2. 圖 15 TYPEII 補償的電壓控制模式 當輸出電容所產生的零點,比交越頻率(crossover frequency) fC 要來得更低頻時, 就很適合採用 TYPEII 的電壓補償控制模式。TYPEII 補償電路包含 R1、R2 C2、C3 與 EA 如圖 15 所示, RL 是電感的 DCR 電阻,這補償的方式是在這負回授的迴圈上提供兩個 極點和一個零點,作為穩定系統的參數。. 2.3.2. TYPEIII 電壓補償電路. 當輸出電容所產生的零點,比交越頻率(crossover frequency) fC 要來得更高頻時, 就很適合採用 TYPEIII 的電壓補償控制模式。TYPEII 補償電路包含 R1、R4、C4、C3、. R2、C2 及 EA 如圖 16 所示,這補償的方式是在這負回授的迴圈上提供三個極點和兩個 零點,作為穩定系統的參數。. 24.
(37) D1 VIN. GND. RL. L. M1. CO. Compensation C2. RO. RC. C1. R2. Compator. VO. EA. RS 1. R1 VREF. RS 2 C3. R3. 圖 16 TYPEIII 補償的電壓控制模式. 2.3.3 電壓前饋控制(Voltage Feed-Forward Control) 當輸入的電壓突然從一個比較低的電壓變化到較高的電壓時,緩慢的反應速度 (slow response speed)將會使得輸出電壓在瞬間產生一個很大的突波(overshoot)。這 是因為在輸入電壓變化的瞬間,工作週期並不能馬上做反應變化的緣故. 針對這個問題 提出電壓前饋控制(Voltage feed-Forward Control)的概念,藉由這種方式來試著去解決 反應速度的問題。在圖 17 中,根據輸入電壓的不同去調整鋸齒波的斜率或是改變工作 週期,這種方法將會大幅度改善線性穩壓(Line Regulation). 25.
(38) TO N V SW TO FF H igher VI. L o w er VI. VP VC. t. 圖 17 電壓前饋控制波型圖. 2.4 電流控制模式(Current Mode Control) 2.4.1 磁滯電流控制(Hysteresis Current Control) 如圖 18 所示,唯一磁滯電流控制電路圖,設計上的控制訊號是由兩個參考訊號. IU , ref 和 I D , ref 來決定。當電感電流低於參考電流 I D , ref 時,功率開關就會導通促使電感電 流上升,當電電流高於參考電壓 IU , ref 時,功率電晶體就會截止使得電感電流下降。此 控制法的優點是電感電流上下限都已經固定,因此其輸入電流失真的機率會比較小,且 不需要斜率補償的優點,但是也有一些缺點,那就是此控制器對雜訊比較敏感,而且兩 個參考電流要做到很接近,受雜訊的影響度便會變大,而且本身必須要考慮到當電感電 流不在這磁滯區間內時,功率電晶體的開關應該如何處理,設計上反而很複雜。另外此 功率電晶體的開關是屬於變頻式的切換控制。. 26.
(39) VIN M1. IL L. Vctrl. C. M2. RO. Vo. IU , ref R2. R1. 參考電壓. R3. 觸發器 I D ,ref. R4. R5. (a) 磁滯電流控制法電路圖. IU ,ref. I G ,avg. I D , ref. IL. (b) 電流波形圖 圖 18 磁滯電流控制. 27.
(40) 2.4.2 峰值電流控制(Peak Current Control) 其控制的原理是將感測到的電流訊號跟電流參考訊號去作比較,再將比較的結果經 由觸發器去產生切換功率電晶體所需的開關控制訊號. 如圖 19 所示: VIN M1. IL L. Vcrel. C. M2. RO. Vo. IU ,ref. R2. R1. 參考電壓. R3. 觸發器 觸發脈波. (a) 峰值電流控制電路圖. I Gavg ,. IUref ,. IL. (b) 電流波形圖 圖 19 峰值電流控制. 28.
(41) 控制訊號的開關週期是由一個時脈週期所決定,因次此電路操作在一個固定的頻 率,另外單方向的控制切換使得電路設計上較為簡單,其缺點是當輸入電壓較低時,輸 入的平均電流值易產生扭曲. 同時由於是峰值電流模式,因此需要額外加一斜率補償 器,以免產生次諧波(Sub-harmonic),電流振盪造成電路的不穩。. 2.4.3 平均電流控制(Average Current Control) 如圖 20(a)、(b)所示為平均電流控制法之電路圖,其電壓回授電路設計原理與峰值 電流控制法大致相同,主要差別在於電流內迴路的設計,平均電流控制法是採取一電阻 來取得所需的電感電流訊號,將感應電阻所量測到的電感電流訊號, 和電流參考訊號 一起送入誤差放大器,經運算後其結果在和脈波調變器的震盪電壓去作比較,使其輸出 開關功率電晶體的脈波訊號. 此方法的優點是大大的減少雜訊對電路所造成的影響,和 峰值電流相比較其較不容易失真且有更佳的電流波形, 且有較低的切換雜訊,所以平 均電流控制法目前在使用上非常普遍。 VIN M1. IL. L. Vctrl. M2. C. C1 R5. VO. 感測電阻. R1. Rs. C2 R4. 比較器. Rl. I G , avg. R2. EA 參考電壓. (a) 平均電流控制法電路圖 29. R3.
(42) I G ,avg. IL. (b) 電流波形圖. 圖 20 平均電流控制. 30.
(43) 第三章 改良式的均流、線性穩壓和內建測試調 整電路的方式 3.1 傳統均流方式的分析、應用和缺點 目前應用在並聯系統或交錯式並聯系統上,常用的均流機制及方法,可分 [10][11]:電壓下降法(Voltage Droop Method)和主動均流法(Active Current-Sharing. Method);在本節中將分析這些方式並比較其優缺點。. 對於一個並聯交錯式轉換器的應用方面,最主要的均流方式本節將先針對傳統的 均流方式進行討論和分析,並根據每種均流的方式指出其缺點。. 3.1.1 電壓下降法(Voltage Droop Method) 其斜率控制法的定義是當負載電流上升時,輸出電壓會下降。它的工作原理是 利用規劃個別轉換器的輸出阻抗來達到平均分配負載電流,也就是均流的效果 [12~15]。. 圖 21(a)是兩組電源模組並聯使用時,輸出電壓和輸出電流的波形,由這關係 圖我們可以得到一個趨勢概念,那就是當輸出電壓相對於輸出電流變化量急劇時 ( 也就是斜率越大時 ) 兩組並聯模組的電流反而更接近,利用這種方式來達到均流 的目的. 且在圖中,可以看得到兩個電源模組並聯,但其控制電路上並沒有彼此輸 出電流的資訊,VO1、VO2 分別是代表兩組並聯電源模組的個別輸出電流,每一組的 電源模組都會連接到共同的輸出端 VO。 I O1、I O 2 是每個模組的輸出電流,因此. IO 為 2. 每個電源模組應該提供的電流,曲線的斜率所代表的是轉換器輸出阻抗(RO)的倒 31.
(44) 數。 P O W E R M O D U L E1. IO. IO1. LO AD. VO. VO1. P O W E R M O D U L E1. IO2. VO2. 圖 21(a) 典型電壓下降法的基本原理圖. I. I. I O1 IO/2 I O2. V VO. IO1 IO/2 IO2. V. VO2 VO1. VO VO2 VO1. I. I. VO IO1 IO/2 IO2. IO1=IO2 V. IO2. VOVO2VO1. VO=VO V VO2 VO1. 圖 21(b) 典型電壓下降法的基本原理圖. 32.
(45) 圖 21(b)表示電源模組的輸出阻抗 RO 由小到大對於模組均流準確度和電壓調整 率的影響。當 I O1 和 I O 2 越接近. IO ,其均流準確度越高,但其電壓調整率越差。然 2. 而隨著斜率增大,均流的準確度降低,電壓調整率反而變佳,因此互有利弊。 使用這種架構的優點是,結構簡單、成本低、每一個並聯的轉換器不需要互相 連接,每一個轉換器各自調整其本身的輸出阻抗。 電壓下降法的種類分:(1)轉換器內部壓降法 (2)外加電阻壓降法 (3)可規劃壓 降法。 電壓下降法的架構總整理: 優點 : 1. 易建構在並聯系統中。 2. 每一個模組的控制電路不必連接,可以是個別獨立的個體。 3. 其用電阻擔任均流的媒介,屬於被動性的獲取電流資訊,可靠度較高。. 缺點 : 1. 採用外加電阻的並聯方式時,電流通過電阻時會產生 I 2 R 的功率耗損,降低系統. 的轉換效率,不是用於大電流的操作。 2. 較差的負載調整能力,及均流能力。. 電壓下降法是利用調整每個模組的阻抗來達到均流的效果,因此當負載電流分配越好 時,電壓調整率會越差,因此均流效果不好。. 3.1.2 主動均流法(Active Current-Sharing) 主動均流法跟電壓下降法最大的不同在於這種方式必須提供一個連接到各個模組 的一個管道,這管道稱為均流匯流排(Current-Sharing Bus) 。均流匯流排的功能就是: 收集每一個並聯模組電流資訊,然後提供出一個電流參考訊號,則每一個並聯模組可以. 33.
(46) 根據和這電流參考訊號的差值來調整本身的控制訊號。經由此調整,使得輸出的電流能 平均由每個並聯的模組提供。 主動均流法採用取樣均流誤差的形式可分為: 1.. 平均電流法(Average Current AC) [16]:其概念是取得所有並聯模組的平均電壓 值,然後再將這平均電流訊號,作為各模組的電流參考訊號。. 2.. 直接主僕法(Dedicated Master DM) [10~13]:原理是以其中一組電源模組的輸出 電流值作為其他模組的電流參考訊號。. 3.. 主動主僕法(Automatic Master, AM) [10~13]:利用串接二極體的方式,可以動態 選取輸出電流最高的模組做為共同的電流參考信號。. 主動均流法的整理: 優點: 1. 可以改善電壓下降法的缺點。 2. 可同時具備高均流準確度,高電壓調整率。 3. 目前最常使用的並聯均流方式。. 缺點: 1. 需要一組的額外的接腳。. 3.2 改良式均流方式的建製 根據前面的分析,電壓下降法(Voltage Droop Method)雖然簡單,容易達成,不 過因為是屬於被動式的並聯方式,其均流準確度和電壓調整率無法同時具備,且採用外 加電阻的並聯方式取得電流資訊時,電流通過電阻時會產生 I 2 R 的功率耗損。 主動均流法(Active Current Sharing)相較於電壓下降法(Voltage Droop Method) 雖然有較高的穩定度,和高電流調整率,但缺點是卻需要一個外接的接腳,作為均流匯 流排(Current-Sharing Bus)之用。 本論文將使用新的均流的方式,配合主僕法的概念,實際實現電路在交錯式轉換器 上。因此本章節將對改良式的均流方式作原理分析,並和傳統的均流方式去比較闡述, 34.
(47) 使更清楚改良式均流法的優點!. 3.2.1 原理分析 根據前面所提出均流方式的討論,是想是否有高準確度,高電壓調整率,而且不需 用到額外的接腳,更不會造成店流通過電阻產生的功率好損的均流技巧呢? 改良式的動態均流方式其電路示意圖 22 所示 黑色虛線內的部份是所提出實現動 態均流的理論方塊圖。 改良式動態均樓法的原理如下:在系統進入穩態的工作時,回授控制系統會使得誤 差放大器的負端輸入值等於正端輸入的參考電壓(假設誤差放大器是一個理想的放大 器)當輸出電流逐漸增加時,功率電晶體上流過的電流產生的 Vds 電壓差也逐漸增加, 此時電流感測裝置感測到遞增的壓差 Vds,其感應輸出的感測電流相對的也是逐漸增 加,當兩個相位間的電流不平均不一樣時,兩兩之間就會產生一個電流差,將此電流差 產生一個偏移電壓(offset voltage)然後再加上原先誤差放大器的輸出值,將此值傳回 非參考項相位模組的比較器輸入端,藉由誤差項參數的傳入,使得非參考項模組的工作 週期改變,調整其輸出的電流,此輸出電流的改變同時會影響輸出的電壓值,新的輸出 電壓經過誤差放大器處理後產生新的誤差電壓,此新的誤差電壓會和新的偏移電壓一直 迭代處理,直到當兩相位的電流值相等時,此系統才自動趨於穩定。.. 35.
(48) Vcon Soft bias. VCON2. R S Q. Pulse clock. None_ov erlap buffer stage. Vo. buf _outn. L1. buf_outp. Generate offset voltage. LOAD. Current sensing circuit (1) Current Diff Current sensing circuit (1). GND. VCON1 S Q. Pulse clock. R. Soft bias Vcon. None_ov erlap buffer stage. L2. buf_outp buf_outn. C2 R2. R3. C1. C3 RS1. O. EA. vref. R1. IN. RS2. 圖 22 改良式動態均流方式. 3.2.1 比較及闡述 圖 22 的理論方塊圖,可以瞭解到,是一個交錯式的並聯轉換器架構例子。圖中採 用簡單的電壓回授模式作為實驗背景,此架構相較之前電壓下降法,不需要採用額外的 串聯電阻,且相較於主動式均流法也不需要額外的接腳,因此應用上簡單。其次是之前 的均流方式都取輸出端的電流作為均流的電流資訊,此架構採取的是擷取電感前端的電 流資訊作為均流的依據。原因是雖然在輸出端所獲取的電流資訊是最正確,且最及時 的,但是在此處所處理的電流感測方面也較為複雜, 因為輸出端的雜訊, 及瞬間抽載或 不抽載造成的電壓變化影響,都可能造成電流資訊的誤差,因此採用輸出端感測電流時 在取樣保存電路上要特別注意避掉雜訊時段的訊號。本論文電晶體電流感測的方式應用 36.
(49) 在交錯式並聯或單純的並聯電路上,是考慮避免取樣到太多的雜訊資料而影響到電流感 測的誤差,且在交錯式轉換器的架構裡面,通常會做到固定頻率,然後每個相位交替輪 流去開關功率電晶體產生驅動電流,採用電晶體感測電感前端電流的方式除了少雜訊 外,還考慮到交錯式電源轉換器的對稱性,由於對稱,因此兩兩項位相減後的電流,其 內含雜訊的因素也相對地少。 此外,我們要擷取的訊號是兩相位的電流差,因此此架構最著重的是在感測電路的 對稱性,而非他的精準度,感測電路在製作上也較為容易,連帶在取樣保存電路和電流 鏡向電路設計上也較為輕鬆。 綜合前面的闡述,我們可以將此電路架構歸納如下: 主動均流法的整理 : 優點 : 1. 電壓下降法需要額外的感測電阻,可以改善電壓下降法的缺點,且不會造成太大. 的功率損耗。 2. 改善採用主動式均流法時需要一個額外接腳的問題。 3. 由於交錯式轉換器是屬於定頻的架構,因此工作週期時間的長短也代表該向未提. 供電流的大小成正比,因此在取樣電流值時是根據工作週期長短的比例來取樣。 4. 此架構對雜訊免疫力強。 5. 此架構在電流感測,取樣保持上都不需要精準的設計,因為我們是要取得兩電流. 的相對資訊,所以設計上非常簡單容易。 6. 本論文將此均流的架構用在電壓回授模式上,相同的也可以建置在其他快速反應. 的模式上。 7. 在產生偏差電壓的方塊圖裡可以設計可調式的電阻,利用此可調式的電阻,可以. 調整系統對每一個相位間電流均流的敏感度也可以動態調整均流的精確度。 缺點: 1. 對稱性的感測電路,及線路的擺設要做到準確,否則所感測到的偏差電壓會有雜. 訊免疫不全的情形。 37.
(50) 2. 本架構是採用主僕式的架構,因此非參考組的誤差訊號是利用鏡向方式得到的,. 因此在此的電路上精確度就會非常要求。. 3.3 改良線性穩壓的方式 上一節,我們提出在交錯式並聯轉換電路裡面採用動態均流的方式處理兩個模組間 電流不均的問題,接下來為了解決補償因為輸入電壓的變化而影響輸出電壓不穩的問題, 提出動態控制鋸齒波斜率的方式(dynamic control slope of saw-tooth). fixed slop saw-tooth. Vout1 Vout2. D1 D2. 圖 23 輸出電壓隨著輸入電壓改變而變化 由上圖 23 我們可以得到,對於輸入電壓值為 VIN 的輸入電壓,因為都是固定的參 考電壓,所以工作周期將會是 D1 =. VOUT 1 ,這表示我們可以將此輸出電壓穿過此參考的 VIN. 鋸齒波得到我們想要的工作周期 D1,當輸入的電壓變化時,表示成( K ∗VIN )當 K < 1時, 表示輸出的電壓也相對減少,因為增加工作周期的原因,新的工作周期為 D2 =. VOUT 2 . 並 KVIN. 可得到輸出電壓的變化值為: VOUT 1 − VOUT 2 = ( D2 − D1 ) ∗ ( Ampltude of the Saw-Tooth reference). (26). 由上式可知,即使是鋸齒波振幅非常小,但當輸入電壓變化非常大時,輸出的電壓一樣 會受到極大影響。. 38.
數據




+7




Outline
相關文件
具備 (凌陽格式 ) 串列 SRAM 介面. 7 通道10位元電壓類比/數位轉換器 (ADC) 單通道聲音類比/數位轉換器
進而能自行分析、設計與裝配各 種控制電路,並能應用本班已符 合機電整合術科技能檢定的實習 設備進行實務上的實習。本課程 可習得習得氣壓-機構連結控制
油壓開關之動作原理是(A)油壓 油壓與低壓之和 油壓與低 壓之差 高壓與低壓之差 低於設定值時,
請繪出交流三相感應電動機AC 220V 15HP,額定電流為40安,正逆轉兼Y-△啟動控制電路之主
RFID 運作原理是透過一片小型硬體的無線射頻辨識技 術晶片( RFID chips),利用內含的天線來傳送與接
溫度轉換 自行設計 溫度轉換 自行設計 統計程式 簡單 簡單 統計程式.
隨著影像壓縮技術之進步、半導體科技之快速發展、無線通訊技術與數位傳送輸技術
在設計九階段管線式類比數位轉換器中,除了第九級之外,第一到第八級皆 要用到
