Computational Economics 6: 115-129, 1993
(~) 1993 Kluwer Academic Publishers. Printed in the Netherlands.
Development of a Decision Support System for
Service Delivery
A N - P I N C H E N , C H I E N - H U A H W A N G and G A R Y L . H . T A N Institute of Information Management National Chiao Tung University, Taiwan R.O.C. and
C H I E N - Y U A N L I N
Institute of Building and Planning, National Taiwan University, Taiwan R.O.C. (Received: May 1992)
Abstract. Most traditional service delivery models were developed to solve single objective problems. While the disaster recovery task usually needed the consideration of multiple objectives (e.g. the total waiting time, the total weighted time of travelling, the fairness of resource distribution). Therefore, the traditional models can't completely support the disaster recovery task. In the real world, the assignments of service delivery are always performed by the vehicle dispatchers or truck drivers based on their experiences. However, the intuitive assignment methods are lacking a mathematic basis. They may be efficient but not necessarily effective. In order to provide an efficient and effective decision support system, this study has focused on the general expression of performances for service delivery and modifies the traditional delivery models by rule-inference techniques. The objective of this paper is to describe how a decision support system has been developed to achieve the performance requirement in emergency service delivery tasks, while traditional routing algorithms are modified and software techniques are utilized under a PC-based environment. Furthermore, some directions for future improvement are proposed.
Key words. Decision support system, disaster mitigation and recovery, Geographic Information System (GIS), service delivery.
Introduction
In an urban area, a place of concentrated population and economic activity, preparation for handling disasters is critical as large scale disasters often cause tremendous loss. The disaster management problems encountered are often semi-structure, non-deterministic and highly time-constrainted in nature. Dealing with the highly complex decision making process, this paper focused on develop- ing a decision support system to aid effective service delivery for disaster mitigation and recovery. The proposed system attempts to solve real world problems by means of geographic information system (GIS). In this way, decisions can be made by direct involvement and interaction of the decision maker with the system's database and models, along with accurate geographic information. As a result, swift and effective solutions can be generated in a short time, reducing disaster related loss.
116 AN-PIN CHEN ET AL. In examining the service delivery problem, methodologies, models and their limitations are reviewed. Conventional heuristics and algorithms are improved, and an interactive man-machine architecture is developed. Ultimately a highly operational service delivery decision support system practicable in multiple criteria decision making is implemented into an integrated environment. Lastly, a comprehensive example is given to explain the architecture and operations introduced throughout the research.
Review: the problem domain
The service delivery problem is evident in everyday life. It has different forms of applications in various aspects, such as garbage collection, newspaper delivery, and mail delivery. Each has different constraints and objective functions. The problem has been largely discussed as a Vehicle Routing Problem (VRP) or Traveling Salesman Problem (TSP). Numerous methods have been developed and applied, to improve the optimization and practicability of solutions.
The disaster handling problem is one of the most complicated service delivery problems. The disaster handling decision support system deals with spatial and discrete networks of transportation in the urban area, striving for optimization of multiple targets, such as total distance, waiting time, and total weighted traveling time, herewith dealing with the actual environment having one-way streets, left or right turn restriction, different constraints on vehicle type and capacity, route length etc. Thus, powerful and efficient problem solving ability is critical for such a system. In addition, a good disaster mitigation and recovery system requires a flexible account for further expansion of data and model, while user-friendliness facilitates man-machine interaction for average users.
In the last 30 years after Dantzig and Ramser [5], many methodologies have been developed to solve the service delivery problem. The following is a review of the models and techniques. They are divided into the three groups.
a) Mathematical analysis. Mathematical Analysis includes methods such as Branch
and Bound, Integer Programming, and Dynamic Programming. Scholars which discuss the Branch and Bound method, such as in [1], many focus on improving the efficiency of the optimization process.
Integer programming converts the problem into a problem in the domain of set-partitioning and set-covering, using an objective function and constraints to obtain a solution [6,7]. The constraints become very complicated as the actual environment is considered. As for Dynamic Programming, its basic concept is from Bellman's principle of optimality [8], and has been applied on the TSP problem [1]. Three of the methods can give the optimal solution. However, they are rarely used as the problem is NP-complete.
D E V E L O P M E N T OF A DECISION SUPPORT SYSTEM 117 successfully overcome some difficulties of mathematical analysis. According to Golden [9], heuristic methods can be divided into several categories: Saving or Insertion [2,5], Cluster First-Route method [10], Route First-Cluster second, and Improvement or Exchange [3]. Among these methods, the saving algorithm proposed by G.Clarke & J.W. Wright [5] in 1964 has been widely used as various constraints can easily be taken into consideration.
c) Man-Machine interaction methods. Man-Machine Interaction methods have the advantage of solving semi-structured problems based on human experience, improving the system's efficiency through man-machine interaction and providing more practical solutions as the user can participate in providing more realistic constraints [11,12]. This method is getting more important as the use of microcomputers has become popular.
Though previously mentioned methods have been successful in theoretically created problems, they have the limitation of only partially solving the problem in practical applications, because the problem is complex in nature, and the optimization requirements are not bounded to just one kind. To handle such large and complicated problem solving, A . A . Assad made provisions for extending these methods [13] that enhance the heuristics' abilities in a way that they can cope with problems with complex constraints. On the other hand, as Rousseau mentioned [14], no single method can solve all of the service delivery problems as they have different characteristics. Rousseau thus proposed a general concept represented by means of a shell.
His shell has three basic components: objects (origin, stop, route and vehicle), basic operators (init, add, merge and exchange) and selection, in which the user controls the selection of operations towards objects. Thus, using the interactions of the three components, humans take part in the problem solving process. This concept has been amplified, along with the concept of Assad, in this research into a sophisticated environment integrating several other components as shall be presented in the next section.
SYSTEM A R C H I T E C T U R E
The architecture of the system is based on the concept of D D M (Dialogue, Model Base, Database) proposed by Sprague in 1980, (Figure 1) and the concept of Shell described earlier.
The DDM methodology has many advantages: easy to learn, direct manipula- tion, user-friendly interface and fully interactive. The Dialogue part is especially important to solve problems that are not programmable. The system emphasizes total quality and integrity of the whole problem solving process instead of merely concentrating on the efficiency of algorithms.
The DSS proposed here has integrated GIS, expert systems, heuristic and man-machine models, simulation and multiple criteria evaluation model into an
l 18 AN-PIN CHEN ET AL.
d e v i c e ~ keyboard } ( mouse }
Dialogue Window oriented dialogue model I
man-machine c o n v e n t i o n a l
i n t e r a c t i v e problem solving
Model model model
,
!
simulation rules and knowledge base IOata Base I GIS d a t a b a s e
Fig. 1. The DDM (Device Dialogue & Model) architecture.
environment which supports judgements in emergency service delivery. Figure 2 shows overall architecture and components of the DSS. Each component is described as follows.
(a) Geographic Information System (GIS). GIS is generally a powerful tool with
advantages such as great ability to handle spatial and non-spatial data [15], providing interactive information exchange, and high quality precision for calculation and graphics representation. Scholars have shown great interest in the potential for applying GIS to the service delivery problems [2, 7, 9].
In this system, taking advantage of GIS' salient features, it has been applied as a basis of the database management system, providing flexible data modification and appendage, thus attaining real-time interaction between the user and the database. Considering part of the GIS utilizes procedural language, which might cause difficulties for its user, a highly user-friendly interface has been built upon the GIS database to ensure good man-machine communications. This way, the GIS' underlying eff• and ability becomes clear to the decision maker.
(b) The Heuristic Model. The conventional heuristic models used in this system
are saving algorithm [3] and the 2-optimum edge exchange procedure [10]. In processing the routes, saving algorithm efficiently merges routes to lower the number of vehicles and cost of service delivery. As for the 2-opt method, it is
DEVELOPMENT OF A DECISION SUPPORT SYSTEM 119
I~man-machine
Fig. 2, i n t e r f a c eI Heuristic ~_~
Models
--bExpert I
System
man-machine 1
models
problem
I ~ --s o l u i n ~
find new
]multiple
solutions
criteria
l
evaluation ~
system [
system architecture & components
evaluating I
functionsO
weight l
distribution
decision support
responsible for resequencing the order of traversal to obtain a low cost delivery route. Constraints set by the decision maker are inferenced by both of the optimization processes, providing more realistic and intelligent solutions. Both algorithms are adjusted to incorporate the inference machine into the model.
(c) Expert System (ES). The
expert system goes hand in hand with the heuristic model for an optimized solution. The ES uses backward chaining to match rules in the knowledge base. The rules in the knowledge base use rule-based knowledge representation, which will be described in the next section. One of the greatest advantages of this module is that the experiences and knowledge can easily be120 AN-PIN CHEN ET AL. built into the knowledge base. With the expert system inferencing ability and flexibility, feasible results can be generated.
(d) Man-machine model. The man-machine approach in this system is an
extension of the "Shell" concept. Different from the expert system participation in the solution generating process described above, in which the expertise has been built into a knowledge base, it is an environment enabling the user to take part in the optimization process directly. As it is a fact that human's heuristic towards semi-structured is far more effective than to program the machine to make such decisions, it makes sense to provide such an environment allowing experienced decision makers to participate in the process by "instinct".
There are various functions provided in the system to perform the route editing such as specifying a node to be included in the route, selecting a route to be optimized with the 2-opt method, selecting two routes to be merged and extracting a stop from a route. As such, the system integrates the human heuristic and rule-based constraints supporting structured and semi-structured decision making, thereby solving the problem with a new approach.
(e) Simulation and evaluation. The simulation module takes feasible solutions
generated from the heuristic model and the man-machine model, and simulates the routing schemes with actual geographic data from the GIS database.
Through simulations, performance measurements are obtained and are proces- sed by the multiple criteria module. The evaluation calculates the performance values with different criteria and weights, consequently generating an overall performance index. If the result is not satisfying, the process of optimization can be repeated.
Knowledge representation and adjustment of algorithms
Despite the integration of several powerful components, problem solving is still highly complex. Efficient algorithms are needed to speed up the problem solving process. On the other hand, good knowledge representation ensures smooth information flow and manipulation within each component. This section intro- duces the system's knowledge representation and describes several adjustments on existing algorithms to acquire better results.
K N O W L E D G E REPRESENTATION
In the "Shell" architecture proposed by J.M. Rousseau [12], the performance measurements are illustrated by relating attributes of the four objects (origin, stop, route and vehicle) into a formula. However, the method of representation has not been stated. In this system, an analysis of the categorization of issues and attributes of service delivery made by Bodin [2] has been carried out to obtain the
DEVELOPMENT OF A DECISION SUPPORT SYSTEM 121 I JOB I
I ROUTE
[VEHICLE]
O.Service_Vol [HRC] ~ DEMRN13 It
[NODE]I
D . v o l u m e 13.delay V.speed R . d i s t a n c e V . c a p a c i t y f l . a v e r a g e N . d e l a y Fig. 3. [] : set [] : o b j e c t - : 1 to 1 r e l a t i o n -I~ : I to N r e l a t i o n O . - : d e p o t ' s a t t r i b u t eSystem's objects and attributes
O.-: v e h i c l e ' s a t t r i b u t e ft.-: arc's a t t r i b u t e N.-: node's a t t r i b u t e 13.-: d e m a n d ' s a t t r i b u t e
hierarchical relationship of objects. The five major elements representing the system's attributes are: Vehicle, Arc, Node, Depot and Demand, as explained in Figure 3.
Operations can be applied in a set or elements in the set such as +, - , *, /, >(max) and <(min). Below is an example for finding the time spent on an arc.
R U L E NAME: A R C TIME IF 1
THEN RETURN THE TIME OF THIS ARC THEN V A L A . D I S T A N C E / A . A V E R SPEED
ELSE (NULL)
ELSE_VAL (NULL)
In this way, knowledge and constraints can be appended by the decision maker and at the same time understood, inferenced and processed with calculations directly. As a result the user can dynamically expand the system's knowledge for the problem solving process. The notation significantly enhanced the ability of handling constraints in a practical situation.
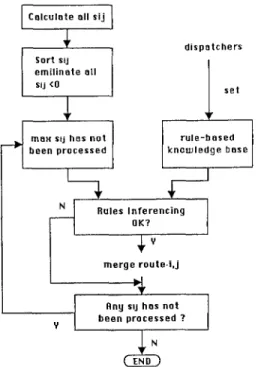
122 AN-PIN CHEN ET AL. THE ADJUSTMENT OF SAVING ALGORITHM
The saving algorithm proposed by Clarke & Wright [3] has been a widely used heuristic method. It is an iteration process of selecting two nodes and linking them up to shorten the distance travelled. After finding the maximum distance saving nodes i, j with saved distance
S(i,
j) a combination (join, attach or merge) is made. Then, constraints such as load restriction and total work time are inferenced to check for any violation. This process is iterated until no improve- ment is required. The constraints in the method improve flexibility in the desired solution.However, the algorithm needs to be modified rapidly as the constraints are different in every case of service delivery. For this reason, the algorithm is adjusted so that the constraints are retrieved from the knowledge base, allowing greater adaptability to different situations. The adjusted saving algorithms are presented in Figure 4.
T H E ADJUSTMENT OF E D G E E X C H A N G E P R O C E D U R E (2-OPTIMUM)
The edge exchange procedure is frequently used for further improving the initial solution. In this system, two-arc exchange (2-optimum) are used. In the optimiz- ing process, two inadjacent arcs are exchanged for possible saving on distance.
Calculate all sij I Sort sq
emilinate all
slj r
_•
max so has not been processed I4,
N
dispatchers s e t rule-based k n o w l e d g e base[
I Rules Inferencing OK? merge route-i,jAny slj has not
been processed ?
&
D E V E L O P M E N T OF A DECISION SUPPORT SYSTEM 123 The process is also an iteration until changes of sequence can no longer shorten the distance. The adjustment here is added to enable constraints in the knowledge bases to participate in the optimization, resulting in an optimization that fits the constraints in practice. The adjusted 2-opt flow chart is shown in Figure 5.
T H E ADJUSTMENT OF SHORTEST PATH SEARCH (FLOYD'S ALGORITHM)
Floyd's shortest path algorithm [13] is applied in this system for finding a shortest path from node to node in the modelling distances of the urban transportation network. As Floyd's algorithm does not consider the problem of one-way streets, left turn or right turn restrictions, an adjustment has been done to model these direction considerations. The method is to build a set
T(n,
a), a subset ofG(n, a),
Fig. 5.
obtain feasible routes and m i n i m u m distance m a t r i x . s u b s t i t g d e s e g m e n t ( i , i + l ) ( j , j + l ) w i t h (i,j) & ( i § 9 (i prior to j ) change s e g m e n t of t r a v e r s a l of nodes b e t w e e n i+I and j , then compute new distance .
new distance < original distance
I
~N
I ' r e s t o r e o r i g i n a l r o u t e ~+
Y flng feasible nodes ( i , i + l ) , ( j , j § 1 ) to process ?&
The procedure of the adjusted 2-OIPT algorithm.
dispatchers r u l e - b a s e d knowledge base Rules Inferencing OK? N
124 A N - P I N C H E N E T AL. i n i t i a t e d i s t a n c e m a t r i } t D & p r e d e c e s s o r m a t r i H Q
@
.J temp=min[dS-', ]
"[ d,"~ ~ +.dk;~l,,-] t e m p = di~ -1 I J = (m~,k,j) T(n,a) G ( N , A ) : N : set of nodes A: set of arcs G: set of arcs x n o d e d~ :shortest distance between i, j after kth process, i,j = N qi~:predececssor of j in path of i to j after kth process D . : s e t of d~ Q . : s e t of q~j n:total of nodes in N T(n, a):set of n o d e x arc for inhibition of turning T ( n , a ) = G(n,a) (i,j,k):segment (i,j) is inhibited to turn to segment (j,k) (i,i,k) = T(n,a) Fig. 6. , Y dki = t e m p L~The adjusted Floyd's algorithm
qikl = q k - 1
to indicate the inhibition of turning. A detail for Floyd's algorithm and its adjustment is shown in Figure 6.
In addition, the system also makes room for a change in requirement, such as changing shortest distance search to minimum time search. This is done by using a minimum cost all-to-all matrix instead of a specific shortest distance all-to-all matrix for a more general problem domain.
The prototype of the system
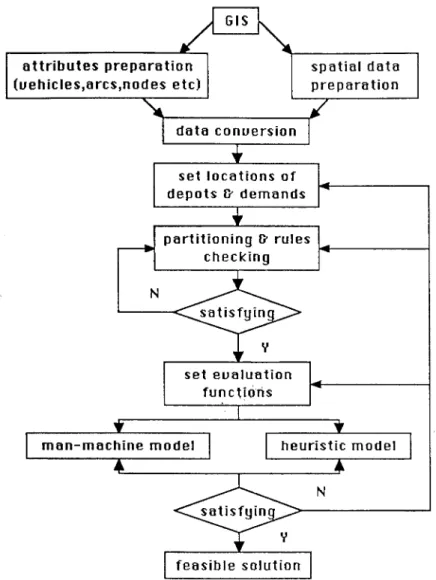
A prototype of the service delivery decision support system based on the research has been developed. The processing flow chart is shown in Figure 7. System operation and solution generation are as follows:
D E V E L O P M E N T OF A DECISION SUPPORT SYSTEM 125
~ data conversion
II s p a t i a l d a t a preparation,d
I
set l o c a t i o n s of ,u d e p o t s & d e m a n d s U b ,~
__~N partitioning & rules 91 checkingset e v a l u a t i o n 1
f u n c t i o n s ~(
I
T
V
I man-machinemodeX [
I heuristic model
Fig. 7. The system processing chart.
a) Firstly, spatial data, such as transportation network coordinates, phases and b o u n d a r y coordinates are converted from the GIS and are read into the system. Attribute data files in Dbase III format are converted by the system. Before the system starts to operate, a minimum cost matrix is built as a basis for later construction of links between depots and demand nodes.
b) After the system starts to operate, the service deliverer is required to set the position of the depots and the demand nodes in a graphic interfacing environ- ment. This can be done easily in a window and mouse driven environment.
c) The next task is to partition the demand nodes, relating them to the depot served. The partitioning task can be accomplished interactively by the user or by employing B. Gillett's two-stage clustering techniques. In the first method, the
126 AN-PIN CHEN ET AL. task can be done by mouse-clicks in which the user explicitly assigns the nodes to their depots.
The latter utilizes a value X set by the user, so that when the distances between demand nodes and depots are compared, nodes having values smaller than X are assigned to the related depot. At the end of this repeated process, each of the unassigned nodes are assigned according to the principle of minimum cost.
d) Before discussing the problem solving process, the user should set rules and constraints practically using the system's rule-based representations. The system provides a built-in editor for various knowledge manipulating operations.
e) The constraints are then inferenced by both the heuristic model and the man-machine model described earlier. A simulation is carried out simultaneously to check for rule violation.
f) Upon the completion of the simulations, the system evaluates the solution and gives a set of performance measurements to facilitate the user's decision making.
g) The communications between the user and the system continue until the solutions are satisfactory.
In the prototype of the service delivery DSS, integration of processes from the initial data collection to the readily feasible solution ensures a smooth information flow within processes. As a consequence, the total quality of the DSS can be improved. In the next section, a comprehensive case study is presented as an example of a practical application.
Example
In this case analysis, the service delivery DSS is used to simulate the situation of water supply in the occurrence of fire in ChiaYi city. There are four depots to serve 20 schools as demand nodes.
Firstly, the task of digitizing the transportation network was handled by the A R C / I N F O GIS. A file conversion was done to obtain spatial data and attributes required in the system. The next step is the partition of depots and nodes.
There were five principles used as a basis of evaluation of the grouping process, namely average degree of service, average service difference, coverage in five minutes, total distance travelled, and weighted average travel time. In this case, they are weighted to attain the primary objective of "depot load fairness". Partitioning policies are obtained by applying the man-machine method and B. Gillett's method. They are evaluated and the performance measurements are generated. Performance indexes were computed according to the weight of each measurement.
From the process above, three better partitioning policies are chosen to be processed for route-finding. Using modified saving algorithm and simulation rules, the system generated different service delivery policies according to different situations and constraints. Again, performance measurements of the routing
D E V E L O P M E N T O F A D E C I S I O N S U P P O R T S Y S T E M
T a b l e I. S e r v i c e s d e l i v e r y p o l i c i e s g e n e r a t e d u n d e r d i f f e r e n t c o n s t r a i n t s .
127
D e m a n d Distance Merging Sequence No. of Total Total Total Total
relaxation of vehicles distance walt travel weighted
traversal traveled time time travel
time Weighted average travel time B1 v 4 23438 194.24 40.5 A B 2 v v 8 28156 141.05 48.34 7 B3 v v v 16 40773 126.71 69.18 B4 v v 7 28035 145.69 48.54 B5 v 4 20895 189 37 A B 6 v v 7 25227 142.98 44 4 B 7 v v v 14 35551 126.55 61.56 B8 v v v 9 29893 140 52.31 B9 v 4 22476 189 37 B10 v v 8 25432 142.98 44 A B l l v v v 13 32740 126.55 61.56 6 B 1 2 v v v 9 29086 136.46 51.47 B13 v v v v 13 32775 133 57.23 37914 21.13 19586 12.33 15139 9.658 20601 13.59 36034 16.9 20464 11 15380 8.74 19047 10.34 36034 16.9 20464 11 15380 8.74 17889 9.66 17807 9.018
solutions were generated, and performance indexes were computed according to the weight allocation schemes,
There were four constraints being considered in the case including: level of demand, distance travelled, merging relaxation and the node priority. As for the evaluation functions of the routes generated, six rules were applied:
A number of vehicles used A total distance travelled
A total waiting time from depots to the demand nodes A total travel time of all vehicles
A weighted total travel time (weighted with the nodes demand)
A weighted average travel time (weighted total travel time/total demand) The performance measurements obtained are shown in Tables I, II and III. Some conclusions were observed in the results: the merging relaxation heuristic improved the saving algorithm in total waiting time. Besides, the rule limiting sequence of traversal has improved total weighted travel time.
The case results substantiate the fact that in a multiple-criteria evaluation process, as the quafity of the solutions are highly dependent on different weight distributions, adding suitable heuristics for a specific objective might increase the effectiveness of the solution generation process.
Conclusion and Further Research
The service delivery decision support system developed in this research has successfully established a flexibility of handling a wide range of service delivery applications. Some of the breakthroughs of model development in the system include:
128
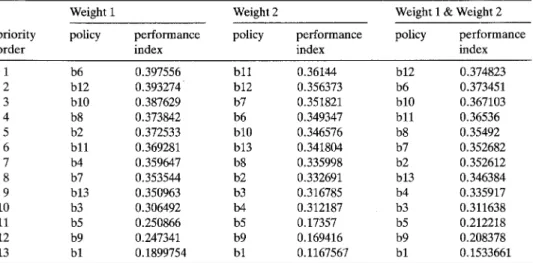
Table II. Performance indexs resulted from the evaluation.
AN-PIN CHEN ET AL.
Weight i Weight 2 Weight 1 & Weight 2
priority policy performance policy performance policy performance
order index index index
1 b6 0.397556 bll 0.36144 b12 0.374823 2 b12 0.393274 b12 0.356373 b6 0.373451 3 bl0 0.387629 b7 0.351821 bl0 0.367103 4 b8 0.373842 b6 0.349347 bll 0.36536 5 b2 0.372533 bl0 0.346576 b8 0.35492 6 bll 0.369281 b13 0.341804 b7 0.352682 7 b4 0.359647 b8 0.335998 b2 0.352612 8 b7 0.353544 b2 0.332691 b13 0.346384 9 b13 0.350963 b3 0.316785 b4 0.335917 10 b3 0.306492 b4 0.312187 b3 0.311638 11 b5 0.250866 b5 0.17357 b5 0.212218 12 b9 0.247341 b9 0.169416 b9 0.208378 13 bl 0.1899754 bl 0.1167567 bl 0.1533661
Table III. Weight distribute for multiple criteria evaluation.
function no. of total total total weighted
vehicles distance wait weighted average
traveled time travel travel
time time
weight 1 0.1515 0.0909 0,3333 0.0909 0.1667
weight 2 0.0357 0.1070 0.5 0.1070 0.1250
2x t h e utilization o f a m i n i m u m cost matrix instead o f a fixed m i n i m u m distance matrix.
2x t h e c o o r d i n a t i o n o f the m a n - m a c h i n e process with the c o n v e n t i o n a l p r o b l e m solving m o d e l s to stretch the ability of the system into s t r u c t u r e d a n d s e m i - s t r u c t u r e d decision m a k i n g .
A effectively adjusted various algorithms for m o r e efficient c o n t r o l o n con- straints. I n c o r p o r a t i o n of an expert system p r o v i d e solutions involving d i s p a t c h e r ' s instincts a n d expertise.
A using the heuristic m o d e l significantly r e d u c e s the solution finding time. O n t h e side o f d a t a base d e v e l o p m e n t by using A R C / I N F O , we h a v e successfully d e m o n s t r a t e d that G e o g r a p h i c I n f o r m a t i o n System ( G I S ) can be utilized to p r o v i d e b o t h g e o g r a p h i c i n f o r m a t i o n and attribute i n f o r m a t i o n f o r n e t w o r k - b a s e d m o d e l l i n g p r o b l e m s . I n terms of system d e v e l o p m e n t in Spatial D e c i s i o n S u p p o r t System ( S D S S ) , o u r s y s t e m has s h o w n a p r o m i s i n g application a r e a in dealing with real-world p r o b l e m .
O n e o f t h e m o s t n o t e w o r t h y aspects in the d e v e l o p m e n t o f t h e s y s t e m is t h e e m p h a s i s o n total quality by c o n c e n t r a t i n g o n the s y s t e m ' s overall a r c h i t e c t u r e a n d i n t e r a c t i o n s within e a c h process. T h e realization of integrating m e t h o d o l o g i e s
D E V E L O P M E N T OF A DECISION SUPPORT SYSTEM 129
of various fields into an operational implementation is proven to be effective and might be an exciting new research area.
It is highly valuable to construct a database for application specific heuristics and constraints for different types of application into an integrated service delivery expert system, which is not available in this context. Other research areas might include a verification of the system's performance in more practical applications and construction of a standard interface with the future GIS.
Lastly, further extension of the concept of 'Shell' would be desirable as it has been successfully realized in this system. It is certainly worthwhile to put more efforts into the improvement of the total quality and effectiveness of the service delivery systems.
References
1. Anderson, D.R., Sweeney, D.J. and Williams, T.A., An Introduction to Management Science, WEST Publishing Company, 3rd Ed.
2. Bodin, L.D., 1990, "Twenty years of Routing and Scheduling," Op. Res., 38, 4, 76-84. 3. Clarke, G. and Wright, 1964, "Scheduling Of Vehicles From a Central Depot to a Number of
Delivery Points," Op. Res., 12, 568-581.
4. Cullen, F., Jarvis, J. and Ratliff, H., 1981, "Set Partitioning Based Heuristics for Interaction Routing", Networks 11, 125-144.
5. Gillett, B. and Miller, L. 1974, " A Heuristic Algorithm for the Vehicle Dispatch Program," Op. Res., 22, 340-349.
6. Golden, B.L., 1984, "Introduction to and Recent Advances in Vehicle Routing Methods," Transportation Planning Models, 383-413.
7. Golden, B.L. and Arjang, A. Assad (eds.), 1988, Vehicle Routing: Methods and Studies, North-Holland, 7-45.
8. Krolak, P., Felts, W. and Nelson, J., 1971, " A Man-Machine Approach Towards Solving the Generalized Truck-Dispatching Program", X X I AGARD Meeting, Rome, May.
9. Lee, J., 1990, " A Data Model for Dynamic Vehicle Routing with GIS," G1S/LIS '90 proceedings, 1, 134-143.
10. Lee, Y.C., 1990, "The Analysis of Heuristic Approaches to the Traveling Salesman Problem and A Study of Neural Net Method Applied to TSP," Thesis of Graduate School of Transportation, National Chiao Tung University.
11. Lin, C.C., 1990, "Multiple Objective Vehicle Routing Decision Support System," Thesis of Natinal Ching Hua University.
12. Rouesseau, J.M., 1988, "Customization Versus A General Purpose Code for Routing and Scheduling Problems: a Point of View," Vehicle Routing: Methods and Studies, North-Holland, 469-479.
13. Teodorovic, D., 1986, Transportation Networks, Gordon & Breach Science.
14. Zhuang, J.L., 1988, " A New Algorithm of Vehicle Routing Problem," Thesis of Graduate School of Transportation, National Chiao Tung University.