Received : Mar. 19, 2007 ©2007 National Kaohsiung University of Applied Sciences, ISSN 1813-3851 Accepted : Mar. 27, 2007
獨立型柴油引擎發電系統動態分析
吳清木*、陳盟仁*、廖宜猷*、林堉仁** *國立高雄應用科技大學電機工程系 **義守大學電機系 E-mail : [email protected]摘 要
本論文主要在探討獨立型柴油引擎發電系統在正常及系統發生故障情況下的動態特性。 研究對象為一個多機的柴油引擎統同步發電系統,該系統組件包括柴油引擎原動機與調速系 統、同步發電機、激磁系統、三相感應電動機、三相變壓器、以及靜態負載等。研究方法為 先推導系統組件的數學模型,接著利用 Simulink 與在同一環境下的 SimPowerSystems 開發各 別組件的模組,然後將模組依系統架構連結,最後模擬系統在正常運轉以及發生三相對稱故 障情況下的動態特性。模擬結果顯示,此系統在這兩種運轉情況下的動態特性都是可以接受 的。本研究最大的價值是可以作為獨立型柴油引擎發電系統規劃、運轉、以及系統擴充的重 要參考。 關鍵詞:柴油引擎發電系統、同步發電機、動態特性分析、Simulink、SimPowerSystems1. 前 言
台灣地區自產能源缺乏,僅有少數的煤、天然氣、水力、和風力,百分之九十七以上能 源需仰賴進口。能源在我們日常生活中扮演著非常重要的角色,除了提供經濟活動的原動力 之外,生活環境品質亦直接或間接受到影響[1]。 發電的能源可來自核能、燃煤、燃油、燃氣、風力、地熱、太陽能等多種,其中核能發 電的利弊見仁見智;台灣水源開發殆盡,水力發電衍生的自然環境衝擊一直受到批評;燃煤 發電引發的空氣污染則需仰賴昂貴的環境保護後處理設備克服。因此,以國內的工業型態和 日趨嚴格的環境保護要求,使用燃油或燃氣為燃料的高熱效率、低排放污染的氣渦輪機組最 具市場潛力,也是政府發電政策的大方向[2]。 在許多偏遠或離島等地區,一般中心電廠所發出之電力難以傳輸到這些地方,因此最常使用在這些區域的發電技術就是柴油發電機。主要是因為柴油發電裝置具有啟動容易、設備 費低廉、建廠期間短及電壓、頻率調節穩定等優點。 柴油引擎發電相關文獻很多,許多研究論文也針對各個領域作深入的探討。Hassan 等人 用數學方法將系統化為等效電路,文中針對系統在面對瞬間電流時,所對應的數據[3]。Yeager 等人建立發生突發事件時系統中心設備的模型[4]。Konidaris 等人探討當受到外界壓力時,系 統提出預報之參數設定[5]。Huang 分析當系統經過大事故後,可能發生震盪現象的原因[6]。 IEEE 提出了柴油發電機與預報測試的近似模型[7,8]。Dokopoulos、Saramourtsis 分別提出了 柴油引擎結合風力機的發電系統的計算[9,10]。Tripathy 等人進一步提出使用變壓器隔離負載 與供應端,以確保系統穩定與安全性[11]。Chedid 等人更提出以 Fuzzy 方式控制系統,可讓 系統獲得更佳性能[12]。Malatestas 等人建構有關風力-柴油系統模組,來評估風的穿透性對系 統的影響[13]。 本研究主要目的在於探討柴油引擎發電系統獨立運轉的動態特性。本研究採用 Simulink 與架構在同一環境下的 SimPowerSystems 來建構模組,並且模擬不同的轉模式下系統變數的 變化情形。此研究的價值在於可以作為獨立型柴油引擎發電系統規劃、運轉、以及系統擴充 的重要參考。
2. 柴油引擎發電系統
2.1 系統架構圖 圖 1 為本研究所使用的獨立型柴油引擎發電系統架構,其中包括四套 1.33MVA 柴油引擎 發電系統、四台 380V/11.4kV 三相變壓器、一部 373kW 三相感應電動機、以及三個集總的靜 態負載等組件。 圖 1 獨立型柴油引擎發電系統架構2.2 柴油引擎原動機模型 圖 2 為柴油引擎原動機方塊圖,包括控制系統與執行系統。電力系統頻率正比於發電機 轉速,頻率調節是透過原動機之調速系統來實現。當發電機組轉速偏離額定轉速時,渦輪機 之調速機構,在偵測到速率變動時,將改變數入閥門的位置,調整原動機的輸出,使保持速 率能到達新的穩態值[14]。 圖 2 柴油引擎原動機方塊圖 2.3 同步發電機模型 同步發電機運轉時除了必須有原動機供應機械功率外,還要有激磁系統來調節端電壓。 同步發電機由於可以控制虛功率的輸出,所以常應用在容量較大的發電系統。同步發電機的 電壓方程式參考到轉子軸後可表示成 qs s q r d mq r md r md qs ds r q s d r mq md md ds kq mq kq kq kq fd md fd fd md fd kd md md kd kd kd v r pL L pL L L i v L r pL L pL pL i v pL 0 r pL 0 0 i v 0 pL 0 r pL pL i v 0 pL 0 pL r pL i ω ω ω ω ω − − − ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ − − − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢= − + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − + ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (1)
其中 vds、ids是 d 軸定子電壓及電流,vqs、iqs是 q 軸定子電壓及電流,vkq、ikq是 q 軸阻尼繞組
電壓及電流,vfd、vkd、ifd以及 ikd是激磁繞組電壓、d 軸阻尼繞組電壓、激磁繞組電流、以及 d 軸阻尼繞組電流,rs、rfd、rkd、以及 rkq是定子繞組電阻、激磁繞組電阻、d 軸阻尼繞組電阻、 以及 q 軸阻尼繞組電阻,Ld、Lq、Lfd、Lkd、以及 Lkq是 d 軸電感、q 軸電感、激磁繞組電感、 d 軸阻尼繞組電感、q 軸阻尼繞組電感,Lmd及 Lmq是 d 軸互感及 q 軸互感,p 是微分運算子。 此外,同步發電機所產生的電磁轉矩也可表示成 e m d d s fd k d q s m q q s k q d s 3 T n [ L ( i i i )i L ( i i )i ] 2 = − + + − − + (2)
2.4 激磁系統模型
自 1968 年起 IEEE 就陸續提出激磁系統(Excitation system)的各種動態模型並且廣泛的 應用在各種研究[15-18]。激磁系統的基本原理是藉由同步發電機端電壓回授訊號與參考信號 相比較後經自動電壓調整器(Automatic voltage regulator, AVR)及激磁機(Exciter)來改變激 磁電壓,達到控制端電壓的目的。圖 3 為 IEEE Type 1 激磁系統方塊圖,此系統可以用狀態方 程式表示成 R R A A A 1 1 A A A A 2 2 E E 3 3 E E 4 4 5 5 F 1 F 1 F F F 1 F 2 F 1 F 2 F 2 1 1 0 0 0 0 0 0 0 0 T T K 1 K K 0 0 0 0 0 0 x x T T T T x x ( K S ) 1 0 0 0 0 0 0 0 0 p x x T T x x 1 1 0 0 0 0 0 0 0 0 x x T T K K 1 0 0 0 0 0 0 0 T T T T T − ⎡ ⎤ ⎡ ⎢ ⎥ ⎢ ⎢ ⎥ ⎢ − − ⎢ − ⎥ ⎢ ⎡ ⎤ ⎢ ⎥⎡ ⎤ ⎢ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎢ ⎥ ⎢ − + ⎥⎢ ⎥ ⎢ ⎥=⎢ ⎥⎢ ⎥+ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ − ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎢ ⎥ ⎢ − − ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎣ ⎦ T REF 2 L 2 L 2 L v v x x x ⎤ ⎥ ⎥ ⎥ ⎡ ⎤ ⎥ ⎢ ⎥ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎦ (3) 圖 3 IEEE Type 1 激磁系統方塊圖 2.5 三相感應電動機 三相感應電動機的定子結構為三相對稱繞組,轉子結構則有鼠籠式及繞線式兩種。感應 電動機的電壓方程式參考到靜止軸後可表示成 qs s ss m qs ds s ss m ds qr m r m r rr r rr qr dr r m m r rr r rr dr v r pL 0 pL 0 i v 0 r pL 0 pL i v pL L r pL L i v L pL L r pL i ω ω ω ω + ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢= ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − + − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (4) 其中 vqs及 iqs分別是 q 軸定子電壓及電流,vds及 ids 分別是 d 軸定子電壓及電流,vqr及 iqr分
別是 q 軸轉子電壓及電流,vdr及 idr分別是 d 軸轉子電壓及電流,Lm是磁化電感,p 是微分運 算子[19]。 2.6 三相變壓器 對於獨立型發電系統,由於電力傳輸的距離較短線路阻抗可以忽略不計,因此三相變壓 器的電壓方程式可表示成 q1 1 11 m q1 d 1 1 11 m d 1 q 2 m 2 22 q 2 d 2 m 2 22 d 2 v r pL 0 pL 0 i v 0 r pL 0 pL i v pL 0 r pL 0 i v 0 pL 0 r pL i + ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢= ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (5) 其中 vq1及 iq1分別是 q 軸一次側電壓及電流,vd1及 id1分別是 d 軸一次側電壓及電流,vq2及 iq2分別是 q 軸二次側電壓及電流,vd2及 id2分別是 d 軸二次側電壓及電流,r1及 r2分別是一 次側及二次側電阻,L1及 L2分別是一次側及二次側電感,Lm是磁化電感,p 是微分運算子。 2.7 靜態負載 集總的靜態負載可考慮成包含電阻性和電感性負載,其電壓方程式可以表示成 qk sk sk qk dk sk sk dk v r pL 0 i v 0 r pL i + ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ = ⎢ ⎥ ⎢ + ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (6) 其中 vdk及 idk分別是 d 軸電壓及電流,vqk及 iqk分別是 q 軸電壓及電流,rsk及 Lsk分別是電阻 及電感,p 是微分運算子。
3. 動態特性模擬
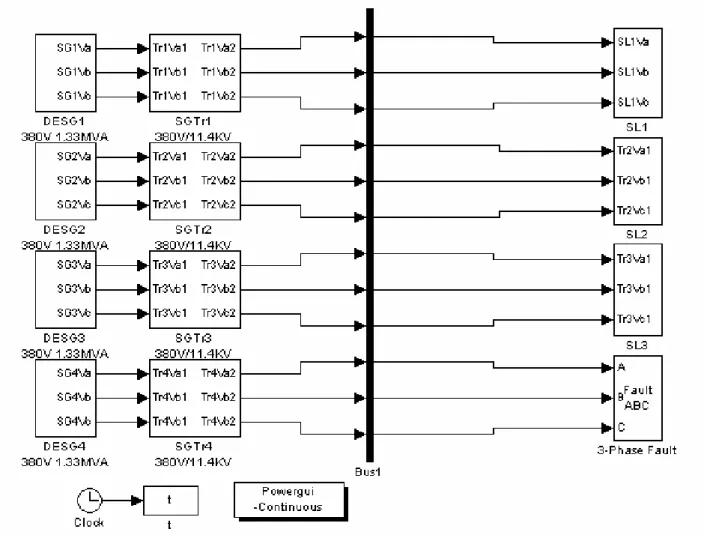
3.1 SimPowerSystems 模組 獨立型柴油引擎發電系統的 SimPowerSystems 模組架構如圖 4 所示。此模組包括三個部 份,左邊是柴油引擎發電系統,中間是三相變壓器,右邊為靜態負載與電動機負載。圖 4 獨立型柴油引擎發電系統 SimPowerSystems 模組 3.2 模擬順序 3.2.1 正常運轉模擬 系統於 0 秒啟動,4 秒時加入 SL1,10 秒時加入 SL2,15 秒時加入 SL3 及 Motor1,總 模擬時間 30 秒。模擬時序圖如圖 5 所示。各特定時間點發電容量與負載容量比如表 1 所示。 3.2.2 三相對稱故障模擬 系統於 0 秒啟動,4 秒時加入 SL1,10 秒時加入 SL2,15 秒時加入 SL3 及 Motor1,25 秒時 Bus1 發生三相對稱故障,25.2 秒時故障排除,總模擬時間 30 秒。模擬時序圖如圖 6 所示。
圖 5 正常模式運轉模擬時序圖 圖 6 三相對稱故障模擬時序圖 表 1 發電容量與負載容量比 時間(秒) 總發電設備容量(MVA) 總負載容量(MVA) 發電容量與負載容量比值 0 5.32 0 1 : 0 4 5.32 0.6 1 : 0.113 10 5.32 2.6 1 : 0.489 15~30 5.32 4.9 1 : 0.935 3.3 模擬結果 圖 7~10 為正常運轉模擬系統變數變動的情形;圖 11~13 為三相對稱故障模擬系統變數變 動的情形。所有的變數都以個別組件的容量為標么基底表示。由於四套柴油引擎發電系統的 容量與參數皆相同,因此僅列出其中一套系統的結果。 由模擬結果也可看靜態負載的電壓、電流、實功率、以及虛功率都受到電壓和頻率變動 的影響。 正常運轉模擬主要目的是了解柴油引擎發電系統在負載順序加入後系統變數變動情形。 圖 7a 顯示原動機的輸出功率會隨著負載增加而增加。圖 7b 顯示發電機轉速在負載投入時有 明顯的下降,隨即達到穩態。圖 7c 顯示同步發電機的激磁電壓在負載投入時會略微下降,隨 即由於激磁系統的調節而達到穩態。圖 7d 為發電機激磁電壓,與端電壓相對應,亦即,端電 壓下降激磁壓會上升。響應時間的長短與發電機參數以及激磁系統參數有關。圖 7e 顯示發電 機的電流會隨著負載的增加而增加。圖 7f 為發電機實功率,由圖中可看出實功率會隨著負載 的順序加入而增加。圖 7g 為發電機虛功率,明顯看出當 Motor1 起動時,虛功率的變化較大, 起動完成後,虛功率就會下降。圖 7h、8a~8f 為 SGTr1 變數變動情形.由圖中可看出電壓、
電流、實功率、虛功率都會隨著負載的順序投入而變動。同樣地,由圖 9、圖 10 可看出靜態 負載和電動機的電壓、電流、實功率、虛功率也都會隨著負載的順序投入而變動。 三相對稱故障模擬的觀察重點在故障發生以及排除後系統變數變動情形。圖 11a 顯示故 障發生時由於負載功率降低,原動機輸出功率相對應減少;然而因為轉速的響應速度較慢, 使得發電機產生短暫的過速,如圖 11b 所示。故障點端電壓嚴重下降,使得發電機的端電壓 也嚴重下降,而激磁電壓卻大量的增加,如圖 11c、11d 所示。圖 11e 為發電機實功率,則隨 著負載功率的變動而變動。至於負載及變壓器變數變動情形,也會因為三相對稱故障而產生 很大的暫態,如圖 12~14 所示。 3.4 評 論 模擬結果顯示,此獨立型柴油引擎發電系統在正常與三相對稱故障情形下的動態特性都 是合理的。然而,在實際的運轉中,事件發生如負載加入、負載切離、故障發生的情形不一 定會如此緊湊,因此系統響應可能會較緩和。由於故障模擬的觀察重點在於故障發生所造成 的暫態現象以及故障排除後的行為,所以故障時間設定為 0.2 秒。然而,在實際的系統運轉 中,故障持續時間會因保護電驛的設定而不同,系統組件的切離會因保護協調的安排而不同, 故障造成的影響也會因故障時間點、接地阻抗、以及系統組件參數而不同。
4. 結 論
本研究主要目的在探討獨立型柴油引擎發電系統在正常運轉以及發生三相對稱故障情況 下的動態特性。研究對象為一個由四組柴油引擎發電系統與其它系統組件包括功率調節系 統、靜態負載、變壓器及電動機負載等組成的系統。研究方法為先推導系統組件的數學模型, 接著利用 Simulink 與 SimPowerSystems 開發模組,然後將這些模組依系統架構連接,最後進 行動態特性模擬與分析。模擬結果顯示,此獨立型柴油引擎發電系統在正常與三相對稱故障 情形下的動態特性都是合理的。本研究最大的價值是可以作為獨立型柴油引擎發電系統規 劃、運轉及系統擴充的重要參考。參考文獻
[1] 王淑貞、鄭博昕、黃培華、楊睦貴,“風力柴油混合發電系統動態模擬",中華民國第 二十五屆電力工程研討會,pp.289-294。 [2] 教育部區域產學合作中心,國立台北科技 大學計畫:能源與資源科技研發中 心 , http://140.124.60.206/criep/。Performance of Standby Diesel-Generator Units by Simulation,” IEEE Transactions on Energy
Conversion, Vol. 7, No. 3, 1992, pp. 470-477.
[4] Yeager, K. E. and J. R. Willis, “Modeling of Emergency Diesel Generators in an 800 Megawatt Nuclear Power Plant,” IEEE Transactions on Energy Conversion, Vol. 8, No. 3, 1993, pp. 433-441.
[5] Konidaris, D. N. and J. A. Tegopoulos, “Sensitivity of Torsional Stress Predictions of Diesel Generator Sets to Critical Parameter Values,” IEEE Transactions on Energy Conversion, Vol. 11, No. 3, 1996, pp. 515-522.
[6] Huang, Y., “Analysis of a Possible Reason for Oscillation Phenomena in A Diesel Generator Set Through Catastrophe Theory,” IEEE Transactions on Energy Conversion, Vol. 10, No. 4, 1995, pp. 700-705.
[7] IEEE Standard Criteria for Diesel Generator Units Applied as Standby Power Supplies for
Nuclear Power Generating Stations, IEEE std 387-1995, December 1995
[8] IEEE Standard Periodic Testing of Diesel-Generator Units Applied as Standby Power Supplies
in Nuclear Power Generating Stations, IEEE std 749-1983, December 1981
[9] P.S. Dokopoulos, A.C. Saramourtsis, and A.G. Bakirtzis, “Prediction and Evaluation of the Performance of Wind-Diesel Energy Systems”, IEEE Transactions on Energy Conversion, Vol.11, No.2, June 1996, pp.385-393.
[10] Saramourtsis, A. C., A. G. Bakirtzis, P. S. Dokopoulos, and E. S. Gavanido, “Probabilistic Evaluation of the Performance of Wind-Diesel Energy Systems,” IEEE Transactions on
Energy Conversion, Vol. 9, No. 4, 1994, pp. 743-752.
[11] Tripathy, S. C., M. Kalantar, and R. Balasubramanian, “Dynamics and Stability of Wind and Diesel Turbine Generators with Superconducting Magnetic Energy Storage Unit on an Isolated Power System,” IEEE Transactions on Energy Conversion, Vol. 6, No. 4, 1991, pp. 579-585. [12] Chedid, R. B., S. H. Karaki, and C. El-Chamali, “Adaptive Fuzzy Control for Wind-Diesel
Weak Power Systems,” IEEE Transactions on Energy Conversion, Vol. 15, No. 1, 2000, pp. 71-78.
[13] Malatestas, P. B., M. P. Papadopoulos, and G. Stavrakakis, “Modelling and Identification of Diesel-Wind Turbines Systems for Wind Penetration Assessment,” IEEE Transactions on
Energy Conversion, Vol. 8, No. 3, 1993, pp.1091-1097.
[14] P. Kundur, Power System Stability and Control, McGraw-Hill, 1994.
[15] IEEE Committee Report, “Excitation System Dynamic Characteristics,” IEEE Transactions on
Power Apparatus and Systems, PAS-92, 1973, pp.1460-1464.
[16] IEEE Committee Report, “Excitation System Models for Power System Stability Studies,”
IEEE Transaction on Power Apparatus and Systems, PAS-100, 1981, pp. 494-509.
[17] IEEE Committee Report, “Computer Models for Representation of Digital-Based Excitation Systems,” IEEE Transaction on Energy Conversion, Vol. 10, Issue 4, 1996, pp. 706-713.
[18] 王允成,小水力發電系統動態分析,國立高雄應用科技大學碩士論文,2005。
(a) DE1 輸出功率 (e) SG1 電流
(b) SG1 轉速 (f) SG1 實功率
(c) SG1 端電壓 (g) SG1 虛功率
(d) SG1 激磁電壓 (h) SGTr1 二次側端電壓 圖 7 正常運轉模擬系統變數變動情形(一)
(a) SGTr1 一次側 A 相電壓 (e) SGTr1 實功率
(b) SGTr1 二次側 A 相電壓 (f) SGTr1 虛功率
(c) SGTr1 一次側 A 相電流 (g) SL1 端電壓
(d) SGTr1 二次側 A 相電流 (h) SL1 A 相電壓 圖 8 正常運轉模擬系統變數變動情形(二)
(a) SL1 A 相電流 (e) SL2 端電壓
(b) SL 1 實功率 (f) SL2 A 相電壓
(c) SL1 虛功率 (g) SL2 實功率
(d) SL2 A 相電流 (h) SL2 虛功率
(a) SL3 端電壓 (e) SL3 A 相電流
(b) SL3 A 相電壓 (f) Motor1 轉速
(c) SL3 實功率 (g) Motor1 電磁轉矩
(d) SL3 虛功率 (h) Motor1 A 相電流 圖 10 正常運轉模式系統變數變動情形(四)
(a) DE1 輸出功率 (e) SG1 電流 (b) SG1 轉速 (f) SG1 實功率 (c) SG1 端電壓 (g) SG1 虛功率 (d) SG1 激磁電壓 (h) SGTr1 二次側端電壓 圖 11 三相對稱故障模擬系統變數變動情形(一)
(a) SGTr1 一次側 A 相電壓 (e) SGTr1 實功率
(b) SGTr1 二次側 A 相電壓 (f) SGTr1 虛功率
(c) SGTr1 一次側 A 相電流 (g) SL1 端電壓
(d) SGTr1 二次側 A 相電流 (h) SL1 A 相電壓 圖 12 三相對稱故障模擬系統變數變動情形(二)
(a) SL1 A 相電流 (e) SL2 端電壓
(b) SL1 實功率 (f) SL2 A 相電壓
(c) SL1 虛功率 (g) SL2 實功率
(d) SL2 A 相電流 (h) SL2 虛功率
(a) SL3 端電壓 (e) SL3 A 相電流
(b) SL3 A 相電壓 (f) Motor1 轉速
(c) SL3 實功率 (g) Motor1 電磁轉矩
(d) SL3 虛功率 (h) Motor1 A 相電流 圖 14 三相對稱故障模擬系統變數變動情形(四)
附錄 系統組件參數 柴油引擎參數 激磁系統參數 調節增益 40 低通濾波時間常數(ms) 20 T1=0.01 調節增益 200 T2=0.02 調節時間常數(s) 0.02 T3=0.2 激磁增益 1.0 T4=0.25 激磁時間常數(s) 0 T5=0.009 阻尼增益 0.001 調節時間常數(s) T6=0.0384 阻尼時間常數(s) 0.1 引擎延遲時間(s) 0.024 初始端電壓(pu) 1 初始輸出功率(pu) 0.097896 初始場電壓(pu) 1.13352 同步發電機參數 變壓器 SGTr1~4 參數 額定功率(kW) 1200 額定容量(kVA) 1500 端電壓(V) 380 一次側電壓(V) 380 額定頻率(Hz) 60 一次側額定線電流(kA) 3.158 額定線電流(kA) 3.158 二次側電壓(kV) 11.4 定子電阻(pu) 0.0093 二次側額定線電流(A) 105.263 定子漏電抗(pu) 0.103 一次側電阻(pu) 0.003 d 軸磁化電抗(pu) 1.207 一次側漏電抗(pu) 0.025 q 軸磁化電抗(pu) 0.647 二次側電阻(pu) 0.003 磁場電阻(pu) 0.0012 二次側漏電抗(pu) 0.025 磁場漏電抗(pu) 0.1420 磁化電抗(pu) 50.0 d 軸阻尼電阻(pu) 0.0425 d 軸阻尼漏電抗(pu) 0.130 q 軸阻尼電阻(pu) 0.028 q 軸阻尼電阻(pu) 0.075 慣性常數(s-KW/KVA) 1.68 電動機 Motor1 的參數 靜態負載 額定功率(kW) 373 SL1 端電壓(V) 440 實功率(MW) 0.54 額定頻率(Hz) 60 虛功率(MVAR) 0.262 額定線電流(A) 485.5 SL2 定子電阻(pu) 0.0158 實功率(MW) 1.8 定子漏電抗(pu) 0.085 虛功率(MVAR) 0.872 磁化電抗(pu) 3.67 SL3 轉子電阻(pu) 0.0158 實功率(MW) 1.8 轉子漏電抗(pu) 0.085 虛功率(MVAR) 0.872 慣性常數(s-kW/kVA) 0.8 變壓器 SLTr2 參數 變壓器 SLTr3 參數 額定容量(kVA) 2000 額定容量(kVA) 2500 一次側電壓(kV) 11.4 一次側電壓(kV) 11.4 一次側額定線電流(A) 101.3 一次側額定線電流(A) 126.6 二次側電壓(V) 220 二次側電壓(V) 440 二次側額定線電流(A) 5248.6 二次側額定線電流(A) 3280.4 一次側電阻(pu) 0.0037 一次側電阻(pu) 0.0040 一次側漏電抗(pu) 0.0325 一次側漏電抗(pu) 0.0300 二次側電阻(pu) 0.0037 二次側電阻(pu) 0.0040 二次側漏電抗(pu) 0.0325 二次側漏電抗(pu) 0.0300 磁化電抗(pu) 35.00 磁化電抗(pu) 35.00