國
立
交
通
大
學
機械工程學系
碩
士
論
文
電動自行車的煞車回充研究與驅動器設計
Regenerative Braking Research and Driver Design
for Electric Bike
研 究 生:呂秉翰
指導教授:成維華 教授
i
電動自行車的煞車回充研究與驅動器設計
Regenerative Braking Research and Driver Design
for Electric Bike
研 究 生:呂秉翰 Student:Bin-Han Lue 指導教授:成維華 Advisor:Wei-Hua Chieng 國立交通大學 機械工程學系 碩士論文 A thesis
Submitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
In
Mechanical Engineering August 2011
Hsinchu, Taiwan, Republic of China
ii
電動自行車的煞車回充研究與驅動器設計
學生:呂秉翰 指導教授:成維華 博士 國立交通大學機械工程學系碩士班摘要
本文主要探討了用於電動自行車的再生煞車系統,用以增進電動自行 車的續航力。控制器使用了 C8051F340 晶片,並針對三相無刷直流馬達的 平均回充電流作回授控制。應用升壓型電壓轉換器與在升煞車的原理,將 電動自行車於煞車時所損失的動能轉換為電能,回收儲存於電池。利用此 一方法,不但可以延長電動自行車的行駛距離,更提升了能源使用效率。 本文設計的電流回授控制器乃針對回充至電池的平均回充電流,在文中, 除了對馬達、功率開關作玩整個等效電路分析之外,並利用模擬與實驗來 驗證文中設計的控制器工作良好且與理論穩合。iii
Regenerative Braking Research and Driver Design
for Electric Bike
Student: Bin-Han Lue Advisor: Dr. Wei-Hua Chieng
Department of Mechanical Engineering
National Chiao Tung University
Abstract
This thesis presents a method of energy storage system for electric bike. For the purpose of saving energy and increasing the driving range of electric bike, regenerative braking control is considered. In this thesis, we design a controller based on a C8051F340 chip to control the average recharge current of a three-phase brushless DC motor. We use the boost converter operating theory to transfer the kinetic energy when braking lost to the electrical energy and recharged the batteries. This method has advantages of improving the travel range and energy efficiency. A current control feedback focuses on the average recharge current which is returned to the batteries. In this thesis, the equalized circuit models of motors and power switches are analyzed in details, and proved that our design works well and meets the theoretical estimation in experimental results.
iv
誌謝
誠摯的感謝成維華教授與鄭時龍博士,在我就讀碩士這兩年來的教導 與付出,訓練我的能力、督導我的態度,兩位老師的諄諄教誨是使我進步 的原動力,在此再一次的感謝兩位老師的指導。 感謝我的家人,感謝爸媽在這兩年來無怨無悔的付出與支持,讓我可 以安心的過完這段旅程;感謝我的妹妹,妳們的支持是我最大的鼓勵,讓 我可以更努力的念下去。 感謝實驗室的學長們,在我有困難時可以不煩其擾的給予我建議;感 謝我的同學們,在我低潮時能支持我;感謝學弟們,在我忙不過來時能幫 我喘一口氣。 沒有這些值得感謝的人們,我或許就到不了現在這一步了,最後請讓 我再次獻上最誠摯的感謝:謝謝你們!v
目錄
摘要 ... ii Abstract ... iii 誌謝 ... iv 目錄 ... v 表單 ... viii 圖列 ... ix 第一章 緒論 ... 1 1.1 研究背景與動機 ... 1 1.2 文獻回顧 ... 2 1.3 論文架構 ... 3 第二章 基礎理論 ... 4 2.1 前言 ... 4 2.2 無刷馬達的構造和控制原理 ... 4 2.2.1 無刷直流馬達的基本構造 ... 5 2.2.2 霍爾感測器原理 ... 5 2.2.3 無刷直流馬達的控制原理 ... 5 2.2.4 無刷直流馬達的數學模型 ... 7 2.2.5 PID 控制 ... 8vi 2.3 煞車回充原理 ... 9 2.3.1 升壓型電壓轉換器 ... 9 2.3.2 煞車回充原理介紹 ... 11 2.3.3 平均回充電流推導 ... 13 第三章 驅動器的設計 ... 16 3.1 前言 ... 16 3.2 實驗系統架構 ... 16 3.3 硬體電路架構 ... 16 3.3.1 C8051F340 介紹 ... 17 3.3.2 DC-DC 電壓轉換電路 ... 17 3.3.3 直流無刷馬達的 Hall sensor 電路 ... 17 3.3.4 IR2110 驅動電路 ... 17 3.3.5 平均回充電流訊號放大及濾波電路 ... 19 3.3.6 電池電壓偵測電路 ... 20 第四章 回充模擬與驅動器實作 ... 21 4.1 前言 ... 21 4.2 電路模擬與分析 ... 21 4.3 驅動器實作 ... 22 第五章 結果與討論 ... 23
vii
參考文獻 ... 25 表單 ... 28 圖列 ... 36
viii
表單
表 2.1 逆時鐘轉動馬達轉子角度、霍爾訊號與開關切換關係表 ... 28 表 2.2 逆時鐘驅動馬達轉子角度、霍爾訊號與電流迴路關係表 ... 28 表 2.3 回充模式霍爾訊號與開關切換時序表(單開關)... 30 表 2.4 霍爾訊號、電流迴路、馬達轉子位置關係表(單開關) ... 30 表 2.5 回充模式霍爾訊號與開關切換時序表(雙開關)... 32 表 2.6 霍爾訊號、電流迴路、馬達轉子位置關係表(雙開關) ... 33 表 3.1 MCU Pin 腳分配表 ... 35ix
圖列
圖 2.1 無刷直流馬達構造圖 ... 36 圖 2.2 無刷直流馬達定子、轉子、霍爾感測器配置圖 ... 36 圖 2.3 霍爾效應 ... 36 圖 2.4 馬達與變頻器電路圖 ... 37 圖 2.5 逆時鐘驅動霍爾訊號、開關切換訊號與三相電壓圖... 37 圖 2.6 DC 馬達基本架構圖 ... 38 圖 2.7 轉速控制方塊流程圖 ... 38 圖 2.8 升壓型電壓轉換器 ... 38 圖 2.9 開關切換時的等效電路圖 ... 39 圖 2.10 連續導通模式與不連續導通模式電感電流圖 ... 39 圖 2.11 馬達簡化示意圖 ... 40 圖 2.12 開關 S6 導通時電流迴路示意圖(單一開關) ... 40 圖 2.13 開關 S6 截止時電流迴路示意圖(單一開關) ... 40 圖 2.14 反電動勢、霍爾訊號及開關切換時序圖(單開關) ... 41 圖 2.15 開關 S1、S6 導通時電流迴路示意圖(雙開關) ... 41 圖 2.16 開關 S1、S6 截止時電流迴路示意圖(雙開關) ... 42 圖 2.17 反電動勢、霍爾訊號及開關切換時序圖(雙開關) ... 42 圖 2.18 回充電路簡化示意及不連續導通模式電感電流波形圖 ... 43x 圖 2.19 回充電路簡化示意及連續導通模式電感電流波形圖 ... 43 圖 3.1 實驗系統架構 ... 43 圖 3.2 驅動器電路圖 ... 44 圖 3.3 C8051F340 內部架構圖 ... 45 圖 3.4 DC-DC 電壓轉換器電路圖 ... 45 圖 3.5 霍爾感測器電路圖 ... 46 圖 3.6 IR2110 驅動電路 ... 46 圖 3.7 IR2110 內部架構圖 ... 46 圖 3.8 bootstrap 架構圖 ... 47 圖 3.9 平均回充電流訊號量測電路 ... 47 圖 3.10 電池電壓量測電路 ... 48 圖 3.11 控制面板電路圖 ... 48 圖 4.1 電路模擬圖 ... 49 圖 4.2 D=0.1,F=4k Hz 回充電流、平均回充電流圖 ... 49 圖 4.3 D=0.2,F=4k Hz 回充電流、平均回充電流波形圖 ... 50 圖 4.4 D=0.4,F=4k Hz 回充電流、平均回充電流波形圖 ... 50 圖 4.5 D=0.4,F=2k Hz 回充電流、平均回充電流波形圖 ... 51 圖 4.6 D=0.4,F=6k Hz 回充電流、平均回充電流波形圖 ... 51 圖 4.7 D=0.4,F=8k Hz 回充電流、平均回充電流波形圖 ... 52
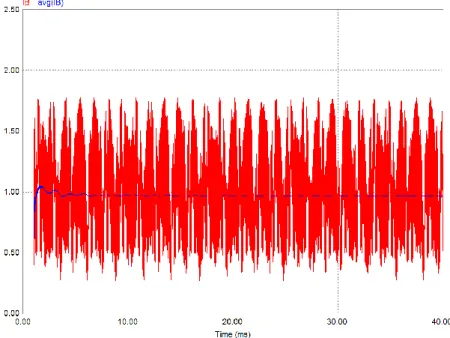
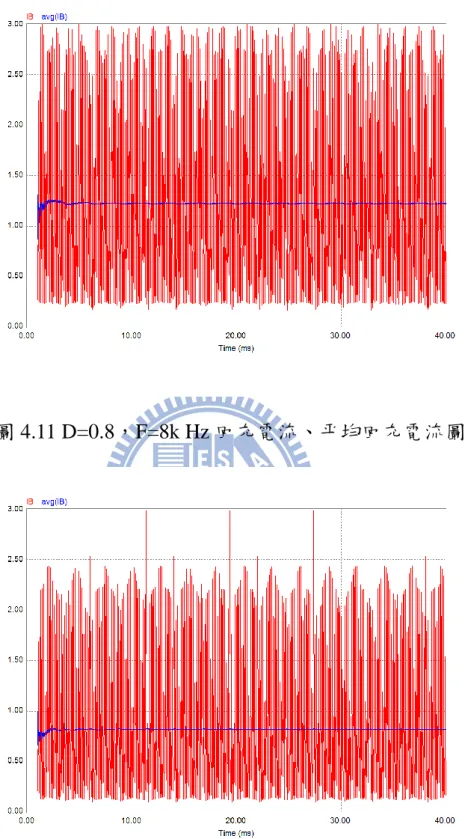
xi 圖 4.8 D=0.6,F=8k Hz 回充電流、平均回充電流圖 ... 52 圖 4.9 D=0.6,F=16k Hz 回充電流、平均回充電流圖 ... 53 圖 4.10 D=0.7,F=8k Hz 回充電流、平均回充電流圖 ... 53 圖 4.11 D=0.8,F=8k Hz 回充電流、平均回充電流圖 ... 54 圖 4.12 D=0.9,F=8k Hz 回充電流、平均回充電流圖 ... 54 圖 4.13 驅動器電路板(正面) ... 55 圖 4.14 驅動器電路板(背面) ... 55
1
第一章 緒論
1.1 研究背景與動機 十七世紀工業革命之後,人類開始大量使用地球上的各種資源,舉凡 煤、石油、天然氣到近代的核能,但經過數個世紀的消耗,地球上的能源 儲量面臨了危機。根據估測,目前石油的存量約可再供給 50 年,燃煤可再 供給 100 年,而核能所伴隨的風險與污染性,顯然不是長遠之計,在尚未 找出新的替代能源前,如合節能就是當今最急迫的課題。除卻能源問題, 環保因素也是近年來在各種產品設計、製造上被考慮的重點。 基於上述背景,電動自行車的發展與市場在近幾年快速成長。而如何 使電動自行車的能源使用、動力傳動更有效率,以及開發高容量電池更是 重點研究的課題。但是相較於高效能馬達與驅動器的快速發展,相較之下 高容量電池的開發卻無重大突破,在容量無法突破的情況下,如何有效率 的使用電池,是目前值得研究的方向。 為了能更有效率的使用電池,考慮在行駛過程中使否有能回收的能量。結 果發現到,在煞車時,傳統方式是以機械煞車增加車輪的摩擦力,將動能 轉換為熱能散發掉,以能量的觀點來看,轉換成熱能散發是一種損失。因 此,考慮如何將煞車時多餘的動能轉換成可用的電能儲存回電池是個研究 的著眼點。2 1.2 文獻回顧 有關電動車煞車能量的回收利用,自電動車開始發展後已有許多文獻 針對此主題進行研究,煞車回充,主要是利用煞車時馬達轉動時產生的反 電動勢,將動能轉換為電能回充至電源端,但是一般行駛狀況下,馬達產 生的反電動勢並不會超過電源端電壓,為了將煞車時馬達產生的反電動勢 能回充至電池, [5]提出了利用額外增加的直流電壓轉換器(DC-DC converter),來提升反電動勢電壓。[6]~[11]則是利用超高電容(Ultracapacitor) 來提供大電流輸出與吸收煞車電流,其中[10]、[11]除了使用超高電容與電 池的串並聯切換外,還搭配了雙繞組式馬達,改變馬達定子繞組的串並聯 方式產生不同的反電動勢,使得反電動勢與電源端電壓得以匹配。[12]提出 了利用驅動器原有的開關與馬達電感來做為升壓型電壓轉換器來提升反電 動勢以達到回充的功能。[13]~[16]則是基於[12]的方法,進一步對回充電 流做控制。 比較各種方法,[5]需要額外增加直流電壓轉換器,增加硬體成本;[6]~[11] 超高電容成本較高,且要針對狀況切換電源端串並聯方式,[10]、[11]馬達 需要特別設計,才能達到切換繞組的功能;[12]~[16]的方法在不增加額外 硬體成本下,仍可達到煞車回充的功能。
3 1.3 論文架構 第一章「緒論」:說明本文的研究背景與動機、論文架構的介紹。 第二章「基礎理論」:闡述無刷直流馬達的架構與工作原理、馬達回充原理 及數學推導過程。 第三章「驅動器的設計與實作」:概述回充電路的硬體架構,在針對驅動電 路的主要部件設計與過程作說明。 第四章「模擬與實驗」:以電路模擬驗證回充理論以及驅動器實作及實驗。 第五章「結論」:對實驗總結與討論。
4
第二章 基礎理論
2.1 前言 針對現有的電動自行車來做觀察,普遍使用的是輪鼓式馬達,為無刷 直流馬達(Brushless DC Motor)的一種。無刷直流馬達有以下優點: 1. 沒有機械式的電刷和整流子 2. 由於沒電刷及整流子,不會有跳火及電刷部分產生碳粉的問題 3. 壽命長 4. 使用磁極檢測器的電子整流裝置 5. 不產生機械的雜音(軸承部分除外) 6. 不產生電氣之雜訊(不產生電波干擾) 7. 容易製造高速旋轉馬達 8. 容易製造多極型馬達(單相、二相……n 相) 9. 正/逆轉扭力大 10. 利用電路技術能夠改善無刷馬達特性等 本章節即針對無刷直流馬達的構造和控制以及回充原理做介紹。 2.2 無刷馬達的構造和控制原理 無刷直流馬達的控制分為有感測器及無感測器控制兩種,有感測器的 控制法主要是利用霍爾感測器(Hall sensor)來檢測轉子位置,進而改變 變 頻器的導通順序來達到控制馬達轉速的效果;無感測器控制法主要是利用 馬達運轉時產生的反電動勢來判斷轉子位置作控制。本文針對有感測器控 制法作介紹及設計回充電路。5 2.2.1 無刷直流馬達的基本構造 圖2.1為無刷直流馬達的基本構造,馬達轉子由永久磁鐵構成,線圈繞 組位於定子上。無刷馬達依定子繞線分類可分為二相、三相、五相等,其 中以三相無刷馬達較為常見。圖2.2為三相無刷馬達繞線與霍爾感測器設置 位置關係圖,根據霍爾感測器得到的訊號,即可得知轉子位置,進而控制 馬達。 2.2.2 霍爾感測器原理 霍爾元件是指在電流流過半導體時,在與電流垂直方向上給予一磁場 時,如圖 2.3 所示,霍爾輸出電壓會產生在與電流、磁場互相垂直的方向上, 其中霍爾輸出電壓 B d I K dne IB VH (2-1) 2.2.3 無刷直流馬達的控制原理 為了控制無刷直流馬達,需要一個 變頻器。圖2.4為 變頻器電路圖與 馬達接線簡圖, 變頻器包含六個電晶體開關,用來控制流向馬達的電流方 向,借著改變電流方向與切換速率,即可控制馬達的轉向與速度。 六步方波控制是一個常見的控制方法, 變頻器的六個電晶體開關根據 六步方波以及霍爾感測器的訊號來改變流經馬達的電流方向,如圖2.5,表 2.1為六步方波開關切換順序表,又此表的每步之間電氣角相差120°,稱為
6 120°六步方波控制,除120°六步方波控制外,還有180°控制法、向量控制 法等,本文針對120°六步方波控制作介紹。 step I,電晶體開關S1、S6導通,電流由S1→U→ →S6。 step II,電晶體開關S1、S5導通,電流由S1→U→ →S5。 step III,電晶體開關S3、S5導通,電流由S3→W→ →S5。 step IV,電晶體開關S3、S4導通,電流由S3→W→ →S4。 step V,電晶體開關S2、S4導通,電流由S2→V→ →S4。 step VI,電晶體開關S2、S6導通,電流由S2→V→ →S6。 在開關切換期間,由於馬達是電感性負載,流過線圈的電流(IL)不會 馬上截止,為了在開關切換後讓原先充能的馬達電感放能,故在電晶體開 關旁加上飛輪二極體,使馬達電感儲存的能量得以經由二極體釋放能量。 馬達電感端電壓可表示成 t I L V L L (2-2)
馬達的機械角(Mechanical angle)、電氣角(Electrical angle)和極數(pole)
有下列關係式 2 pole angle Mechanical angle Electrical (2-3) 以二極無刷直流馬達為例,表 2.2 與圖 2.5 為一個電氣周期下六步方波的開 關切換順序,一個電氣周期下,馬達轉子恰好轉了一圈。
7 2.2.4 無刷直流馬達的數學模型 直流馬達基本架構如圖 2.6,其中 Vin:輸入電壓 RM:馬達電阻 LM:馬達電感 Eemf:反電動勢 Tt:輸出力矩 θt:輸出轉子角度 IM:馬達電流 由 Kirchhoff Laws,可以得到 0 M emf M M M M E dt dI L I R V (2-4) 由於LM RM,因此電流又可以表示如下 M M M M M emf M M R K V R E V I (2-5) 且 g g t M M M K T T J (2-6) 其中 g g t K T 為負載轉矩上之等效負載,g是齒輪箱的效率。 再由馬達負載端觀察可以得到 t eq t t t T B J (2-7)
8 其中Beq為輸出的阻尼係數,結合(2-6)、(2-7)兩式可以得到下列關係式: M t g M g t eq t M g g t t K J B K K I J 2 (2-8) 將(2-5)代入(2-8),經由 Laplace transform 後可得到速度和輸入電壓的 轉移函數:
eq M g gMMMg t t g eq M M t R B K K K s R J K K s V s 2 (2-9) 其中 2 g M g t eq J J K J (2-10) 2.2.5 PID 控制 圖 2.7 為控制方塊流程圖,其中 PID 控制器標準型式如下:
t i d p e d T dt t de T t e K t u 0 1 (2-11) 其中個參數影響如下: Kp:改變暫態響應 Ki:改善穩態誤差(在頻域可視為低通濾波器) Kd:增加系統穩定性(在頻域可視為高通濾波器) 在馬達控制,一般使用 PI 控制,由於在有高頻成分的控制系統中,D 控制 將會大幅影響控制輸出,容易造成系統不穩定,因此我們不加入 D 控制。 經由 Laplace transform,PI 控制器轉移函數可表示為:9 s K K G i P PI (2-12) Z transform 後
1 1 1 1 z z K K z K z K e u G Z P i P i PI (2-13) 上式可整理成
1
1
1 1 1 k e K k e K k u k u z K K e z u i p i p (2-14) 2.3 煞車回充原理 一般行駛條件下,煞車時馬達產生的反電動勢不會高過電源端電壓, 如此一來便無法將反電動勢充能回電池,常見的做法是利用升壓型電壓轉 換器(Boost converter)來將反電動勢升壓,達成回充的功能。本節將對升 壓電路、回充迴路控制以及平均回充電流作介紹。 2.3.1 升壓型電壓轉換器 圖 2.8 為一個升壓型轉換電路,當開關導通時,Vd對電感 L 充磁,輸 入電能儲存於電感;開關截止時,電感 L 將洩放電能至電容 C 與負載上, 電感電流 iL便隨輸出電壓 Vo的上升而減少,等效電路圖如圖 2.9 所示。 由於電感電流在開關截止時會逐漸減少,在這種情況下,有可能降至 零電流使得二極體反偏,故可以將之區分為連續導通模式和不連續導通模 式,這裡的連續指的是電感電流 iL的連續與否。 圖 2.10(a)所示為電感電流為連續下穩態電壓波型。假設開關週期 T,10
D 為週期責任比(duty),開關導通時間 DTs。當開關導通時,Vd對電感充
電;開關截止時,電感對附載放電,開關切換時等效電路如圖 2.9 所示,假
設電感電流為連續導通(continuous current mode, CCM),如圖 2.10(a)所
示,由穩態下電感電壓一週期之平均值為零可得
0
d o off on dt
V
V
t
V
(2-15) 輸入與輸出的電壓比可以表示成下式: D t T V V off d o 1 1 (2-16) 若電路無損失,Pd Po VdId VoIo,則輸入與輸出的電流比可表示如下: D I I d o 1 (2-17)若電感電流為不連續(discontinuous current mode, DCM),如圖 2.10(b)所
示,同樣利用電感電壓一週期平均值為零,輸入與輸出的電壓比、電流比 可表示成下式: 1 1 D V V d o (2-18) D I I d o 1 1 (2-19) L d I I ,由圖 2.10(b)之 iL可得
1
2 DT D L V Id d s (2-20) 將(2-20)代入(2-19)可得11 1 2 D L V T I s d o (2-21) 從上述式子我們可以得知輸出電壓、電流與 D 的關係,藉此我們可以計算 出對應需求電壓、電流的 D 值。 若電感電流 iL於 toff結束時剛好降為 0,我們稱之為連續導通和不連續 導通邊界,電感電流平均值
D
D L V T t L V i I o s on d peak L LB 1 2 2 1 2 1 , (2-22)利用(2-17)與(2-22)可以求得邊界導通(boundary current mode, BCM) 電流
2 1 2L D D V T I s o oB (2-23) Vo固定下,對任一 D 如果負載電流之平均值小於 IoB,iL亦將小於 ILB,則轉 換器將進入不連續導通模式。 2.3.2 煞車回充原理介紹 當我們驅動直流達時,馬達內部會產生與轉速成正比的反電動勢,當 負載慣性甚大時,在停止供應能量下,也就是所有功率開關截止時,由於 慣性作用,仍會持續轉動一段時間,此時常用機械式摩擦來消耗馬達動能,12 使其停止轉動,在慣性轉動的情況下,馬達仍會因轉子轉動而產生反電動 勢,就好如發電機一般。我們就是要利用馬達所產生的反電動勢,回充電 流至電源端,達到能量回充的目的。利用此方法有兩個優點: 一、 可回收能量,使原本的動能轉換為電能 二、 回充時所產生的反向扭力可使馬達的轉速降低,減少機械式煞車 的使用與磨耗 圖 2.11 為電路模型簡圖,[10]中提出了兩種驅動器開關的切換方式,分為使 用上臂(或下臂)三個開關或上、下臂兩開關組合這兩種方法,在馬達煞 車時,將反電動勢視為電壓源,利用馬達電感與驅動器開關、反向二極體 形成升壓電路,將反電動勢升壓後回充至電源端。 圖 2.12 與圖 2.13 為利用 U-W 兩相反電動勢並利用單一開關 S6 來做為 升壓型變壓器之示意圖。 當 S6 導通時,電流流經 S6 與 S4 之反向二極體形成迴路,對馬達電 感充電;S6 截止時,電流流經 S3 及 S4 之反向二極體形成迴路,電感對電 池端充電,對照圖 2.8 可以發現,與升壓型電壓轉換器的架構雷同,改變開 關 S6 的週期責任比(duty)即可改變輸入與輸出電壓。同樣利用 S4、S5 也可以形成升壓電路,然而為了有效的提升電壓,達到輸出電壓最大化, 選擇開關的準則是利用當時三相反電動勢中較大的區間,詳細切換順序如 圖 2.14 與表 2.3,表 2.4 是各階段電流流向與轉子位置圖,其中圖 2.14 是利
13 用下臂開關 S4、S5、S6 的組合,同樣的,利用上臂開關 S1、S2、S3 也可 以達到同樣的升壓電路功能。 利用雙開關的切換方式如圖 2.15、2.16 所示,當 S1、S6 導通時,馬達 的反電動勢 VWU與電池串連一起對馬達電感充電;S1、S6 截止時,電感電 流流經 S3、S4 之反相二極體對電池充電。同樣的方式,依照不同階段的反 電動勢大小來選擇開關順序。詳細開關順序、反電動勢大小、電流導通迴 路與馬達轉子位置如圖 2.17、表 2.5、表 2.6。 前文討論了煞車回充時開關切換的關係與順序,2.3.3 將針對開關切換 頻率 f 與責任週期比 D 對煞車電流的影響來做討論。 2.3.3 平均回充電流推導 煞車電流電流的大小,直接影響到回充效率與煞車力矩的大小,因此 下文將針對單開關切換法,對不連續導通模式與連續導通模式的平均回充 電流做介紹與控制。 一、 不連續導通模式 假設馬達電感電流為不連續導通,圖 2.18 為回充電路簡化電路與電流 波形圖。開關導通時
t R i dt di L V L L emf (2-24) 在DTs秒後,電感電流達到峰值,其峰值電流14 s s emf peak L
DT
RDT
L
V
i
, (2-25) 由於 L 與 RDTs位數差近 2 位,故可省略 RDTs,(2-25)可改寫為 s emf peak LDT
L
V
i
,
(2-26) 開關截止後,電感對電池端充電
t R i dt di L V Vemf b L (2-27) 由於電感電流在週期結束前會降至零,設電流由峰值下降至零的這一段時 間為Ts,則計算後可得 D V V V emf b emf (2-28) 又因為只有在開關 S 截止時,電流才會流經電池,因此在一個週期中,平 均回充電流為
L peak ri
i
,2
1
(2-29) 將式(2-26)代入整理後可得 T V V V L D i emf b emf r 2 2 2 (2-30) 平均電流ir 與 D 2、T 成正比關係,選擇 D 使電流處在不連續導通模式下, 控制切換週期 T 即可控制平均回充電流。 二、 連續導通模式15 假設馬達電感電流為連續導通模式,圖 2.19 為回充簡化電路與電流波 形圖。在連續導通模式下,當開關 S 導通時 dt dI L IR Vemf (2-31) 開關截止時 dt dI L IR V Vemf B (2-32) 又在週期Ts內,開關導通時電樞端電壓Va為 0,開關截止時Va Vb,所以電 樞端電壓Va的平均值
b aD
V
V
1
(2-33) 又電樞電壓可表示為 dt di L IR V Va emf (2-34) 穩態下,電感電壓在一週期間電流變化為 0(如上圖示),故式可改寫為
D
V IR V Va emf b 1 (2-35) 所以平均煞車電流:
R D V V I emf b 1 (2-36) 由於每個週期只有在開關截止時(即
1D
T的時間)電流會回充至電池, 故 平均回充電流:
D R D V V I D Ir 1 emf b 1 1 (2-37) 控制責任比 D 即可控制回充電流的大小。16
第三章 驅動器的設計
3.1 前言 本章將根據第二章的理論基礎與煞車回充電路所需的回授資訊,來設 計與製作驅動器。 第二節說明了實驗的系統架構,描述了控制流程與硬體配置。第三節將對 硬體電路的設計作說明。 3.2 實驗系統架構 圖 3.1 為實驗系統架構示意圖,實驗主要包含了直流馬達、變流器、控 制器。 實驗時,利用 C8051F340 產生 PWM 來控制電晶體開關的切換順序。電流 回授部分,先以電流感測器將回充電流轉換成電壓,再由 F340 內建的 10-bits 的 A/D 轉換器讀取電流值。速度回授部分,則是利用霍爾元件的輸出訊號 來推算馬達轉速。 3.3 硬體電路架構 驅動器電路圖如圖 3.2,本節將對於控制晶片的選擇、電流檢測器的設 計、電壓檢測器等硬體方面作介紹。17 3.3.1 C8051F340 介紹 市面上已有許多馬達控制專用 IC,選擇適當的 IC 對於馬達控制來說是 相當的重要。實驗方面,選擇了 SILICON LAB 的 C8051F340,這顆 IC 是 以 8051 為基礎的進階版,在撰寫程式上容易上手。48-pin TQFP 封裝,提 供了四十組的 I/O 腳位,再加上它提供了二十組的 ADC 腳位,足以符合實 驗所需。圖 3.3 為 C8051F340 的內部架構,表 3.1 是 MCU Pin 腳分配表。 3.3.2 DC-DC 電壓轉換電路 由於電池提供的電壓為 24V,須利用 DC-DC 電壓轉換電路轉換成其他 IC 可利用的電壓。DC-DC 電壓轉換電路是利用 LM3940 和 MC34063 這兩 顆 IC 來做直流電壓轉換的工作,輸出電壓有 3.3V、5V、±15V 的規格。電 路圖如圖 3.4。 3.3.3 直流無刷馬達的 Hall sensor 電路 由於霍爾元件本身式開集極輸出,因此接了提升電阻來 pull-high,電 路圖如圖 3.4。 3.3.4 IR2110 驅動電路 舉凡隔離驅動的方式,每路驅動都需要一組輔助電源,若是橋式變流 器則需要六組,且上橋還需要懸浮電壓,增加了電路的複雜性。IR 公司的
18 IR2110 光電隔離驅動器,輸入與輸出可使用隔離的電壓源,且具備自舉電 路(bootstrap)來解決上橋懸浮的問題,簡化電路。 圖 3.5 為驅動電路圖,圖 3.6 為 IR2110 內部架構圖,為了簡化電路, 設計驅動器時輸入與輸出沒有使用隔離電源。自舉電路工作原理說明如 下: 1. HIN 輸入 high 時,M1 導通,M2 截止,C1 提供 HO 和 VS的壓差 使開關 S1 導通,如圖 3.8(a)。 2. HIN 輸入 low 時,M1 截止,M2 導通,開關 S1 截止。 3. LIN 輸入 high 時, M3 導通、M4 截止、開關 S2 導通,此時 Vcc 對 C1 作充電,如圖 3.8(b)。 圖 3.6 中電容 C4(1μF)和快速二極體 D1(1N4394)主要的作用是 使 VB和 VS維持 15V 的電壓差,C4 維持 15V 是自舉電路的重點,若是 C4 無法提供足額的電壓,將導致 VB與 VS的壓差不足使得上橋開關無法正常 驅動。
在測試 IC 是否正常工作時,HIN 與 LIN 必須是互補訊號,若是 HIN 與 LIN 都為 low 準位,自舉電容的電荷流失也將導致電壓不足使得 HO 沒 有輸出訊號。
SD 腳位為 shut-down 腳位,當輸入為 high 時,使 IC 停止工作,用以 保護電路。
19 3.3.5 平均回充電流訊號放大及濾波電路 電路設計圖如圖 3.9,平均回充電流是透過裝設在功率級電路上的感測 電阻(shunt resistance)來量測的,為避免功率消耗太多在電阻上,電流量 測電阻是一個可以通過大電流的極小電阻,設計是 10mΩ。由於回充電流 經過電阻後轉換成的電壓訊號很小,所以 OP 放大器在選擇上需要特別注意, 設計上選用了 TI 公司的 TL2012CD,這顆 OP 的直流偏移電壓(DC offset) 僅 500μV,如此一來就可以避免偏移電壓太大導致訊號失真的情況。 此外,由於在驅動時和回充時的電流極性相反,為了使 OP 輸出在這兩 個情況下都能產生一個能讓 C8051F340 內部 A/D 轉換器可接收的電壓(0 ~3.3V),在電流訊號放大後增加一個平移電壓 1.5V,。假設流經感測電阻 的電流 I,並定義驅動馬達時電流為正,回充時電流為負,設計過程如下: 假設流經感測電阻(10mΩ)的電流為-6~10A,則壓差-0.06~0.1V,分壓 後 V1、V2壓差-0.012~0.02V 1 88 87 88 V R R R V (3-1)
1 2
2 75 86 76 1 86 76 V V V R R V R R Vo (3-2) 放大 75 倍後,V’:-0.9~1.5V 再經過偏壓 1.5V 可以得到最終 OP 輸出的訊號 Vo可表示為:5
.
1
01
.
0
15
I
V
o (3-1)20 3.3.6 電池電壓偵測電路 為了得知電池狀態,在電池電壓足夠(電量充足)或是電壓過低(電 池過放或已損壞),進而判斷是否要進行回充。電路圖如圖 3.8,OP 輸出的 訊號為
22
DC oV
V
(3-2)21
第四章 回充模擬與驅動器實作
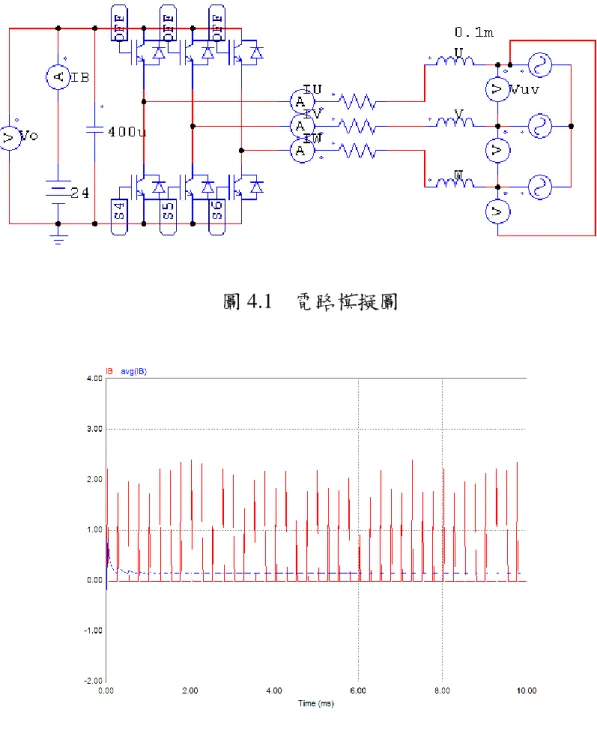
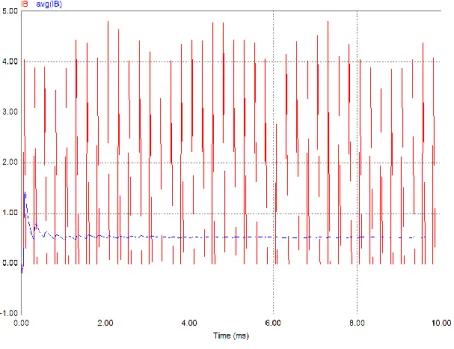
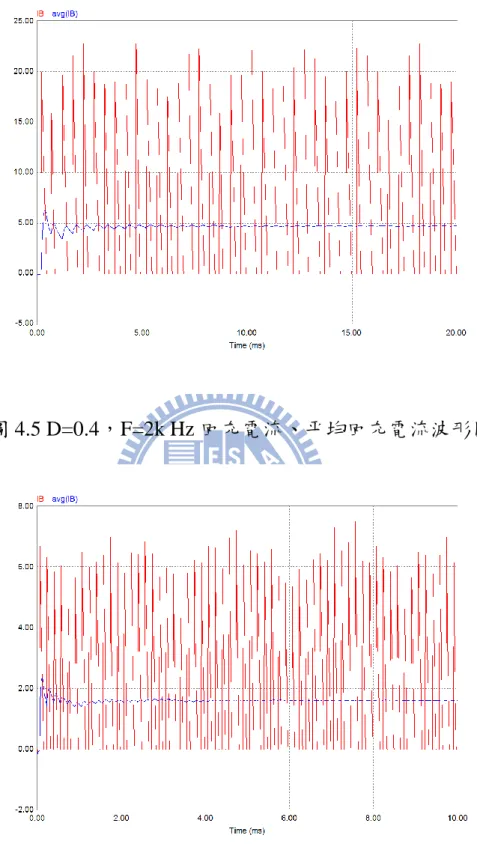
4.1 前言 在第二章中,我們提出了直流馬達煞車回充電流的理論與系統模型, 第三章說明了驅動器電路的架構,本章則將基於第二、三章的理論與電路 架構來進行模擬與實作。 4.2 電路模擬與分析 模擬軟體採用 PSIM,PSIM 具有模擬高速、使用者介面友好、波形解 析等功能,為電力電子電路的解析、控制系統設計、電機驅動研究等有效 提供強而有力的模擬環境,並且可以和其他公司的模擬器連接,為使用者 提供高開發效率的模擬環境。模擬電路圖如圖 4.1,使用的方法是下橋單開 關切換法,開關切換時序如表 2.3,針對不同的 duty 與頻率做開迴路模擬, 模擬結果如圖 4.2~圖 4.12。 圖 4.2~圖 4.7 為不連續導通模式下回充電流圖,從圖 4.4~圖 4.7 觀察 到回充電流 IB與 f 成反比(即與 Ts成正比),圖 4.2~圖 4.4 可以發現到回 充電流 IB與 D 2成正比,這些結果都與第二章所推導在不連續導通模式下的 平均電流公式(2-29)吻合,D 與 Ts上調即可使平均回充電流提升,但根 據升壓式轉換器原理,D 與 Ts會影響邊界輸出電流 IoB(2-23),過大的 D 與 Ts將使電感電流進入連續導通區域。22 圖 4.8~圖 4.12 為連續導通模式下回充電流圖,如圖 4.8 與圖 4.9,可 以發現到改變切換頻率對煞車回充電流的大小沒有影響,與 D 的關係由經 計算過後也與式(2-36)符合,在 D=0.7~0.8 平均回充電流達到最大值,D 再繼續增加則會由於回充時間(1-DTs)下降導致平均回充電流降低。 4.3 驅動器實作 根據第三章的設計,完成的電路板如圖 4.9、圖 4.10,實作電路板大小 約 16 cm*18 cm。
23
第五章 結果與討論
一般市售低價位的電動自行車驅動器功能相當陽春,僅有力矩控制(可 能也只有開迴路控制)及電子煞車的功能,計算車速與顯示還要由另外安 裝的碼表才能顯示,並且由於輸出、輸入端已鎖死,更無法更改或擴充其 他功能。相較於市售的驅動器,本實驗實作之驅動器具有下述優點: 具 C2 debug 連接阜,可撰寫程式修改驅動器功能以及方便進行程式 debug 除了以霍爾感測器訊號進行有感測器控制之外,還具有三相反電動勢的 濾波電路,對於不具備霍爾感測器的馬達也可以做無感測器控制 具 Tx、Rx 傳輸阜,可利用 RS232 通訊阜擴充功能 經由程式設計,可顯示馬達轉速、電流大小、驅動器溫度等資訊 但本實驗之驅動器還是有下述缺點: 體積過大,面積約是市售驅動器的 2 倍,主要原因是由於兩層板與多輸 出腳位在空間上的限制 電壓源過多,增加了電路的複雜度與驅動器體積 另外在實作上常常會遇到理論設計時預想不到的問題,設計與實作不 僅要考慮的比純理論推導時更全面,更需要的是經驗的累積。下面列舉實 作時遇到的問題與最後得到的解決方法: 訊號傳遞不良24
可能的原因有電磁干擾(Electro-Magnatic Interference, EMI)、導線阻抗
不連續。 電磁干擾:類比訊號線路與數位訊號線路要盡量遠離、電源線路佈線 依 Layout 板層數的不同,有不同的佈線策略。 導線阻抗不連續:由於佈線時若鋪線轉彎小度過小,會使得轉彎處線 寬急遽變化而導致導線阻抗變化,因此佈線時避免小角度佈線。 電源端輸出不穩 電池輸出不穩:檢察是否電池沒電或電路板短路使電池異常放電。 DC-DC converter 輸出不穩:元件計算有誤或是耐流(耐壓)與迴路不 匹配,使輸出電流無法提升,導致電壓下降。 訊號輸出浮動 可能是電源迴路的地線干擾了訊號線的地線,使得訊號迴路的準位浮 動,為避免此一狀況,應盡量將電源迴路與訊號迴路隔離。 偵錯 偵錯是最需要實作經驗的部分,舉凡找出損毀的零件,亦或是測試電路 或是元件是否正常工作等,都是從大量的錯誤與失敗中學習得來的。 本論文討論了電動自行車煞車回充的方法,設計一可用於煞車回充之 驅動器並實現,雖然此驅動器以產品化來說還有不少缺點,但是以驗證實 驗的角度來看,是一個足以符合實驗需求的成果。
25
參考文獻
[1]K. Y. Cheng and Y. Y. Tzou, “Design of a sensorless Commutation IC for BLDC Motors”, IEEE Transactions of Power Electronics, vol.18, no.6, pp.1365-1375, November 2003.
[2]H. C. Chen, Y. C. Chang, and C. K. Huang, “Practical sensorless control for inverter-fed BDCM compressors,” IET Proc. Electric Power Applications, vol. 1, no. 1,pp. 127-132, Jan. 2007.
[3]S. Ruangsinchaiwanich, Z. Q. Zhu, D. Howe, “Influence of magnet shape on cogging torque and back-emf waveform in permanent magnet machines”, Electrical Machines and Systems, 2005. ICEMS 2005. Proceedings of the Eighth International Conference on
[4]Y. S. Lai, F. S. Shyu, and Y. H. Chang, “Novel loss reduction pulse width modulation technique for brushless dc motor drives fed by MOSFET inverter”, IEEE Trans. Power Electron., vol. 19, no. 6, pp. 1646-1652, Nov. 2004.
[5]M. Marchesoni, and C. Vacca, “New DC–DC Converter for Energy Storage System Interfacing in Fuel Cell Hybrid Electric Vehicles,” IEEE Trans. Trans. Power Electron., Vol. 22, no. 1, pp.301-308, Jun. 2007. [6]Tongzhen Wei, Sibo Wang, Xuhua Gao, “Performance analysis and
comparision of ultracapacitor based regenerative braking system”, Industrial Electronics and Applications, 2009. ICIEA 2009. 4th IEEE Conference on [7]Shuai Lu, K. A. Corzine, and M. Ferdowsi, “A New Battery/Ultracapacitor
Energy Storage System Design and Its Motor Drive Integration for Hybrid Electric Vehicles,” IEEE Trans. Veh. Technol., vol. 56, no. 4, pp.1516-1523, July 2007.
26
[8] J.W. Dixon, M.E. Ortuzar, “Ultracapacitors + DC-DC converters in regenerative braking system, ”IEEE Aerospace and Electronic Systems Magazine, Vol. 17, No.8, pp.16–21, August 2002
[9] E.J. Cegnar, H.L. Hess, B.K. Johnson, “A purely ultracapacitor energy storage system hybrid electric vehicles utilizing a based DC-DC boost converter,” Nineteenth Annual IEEE Applied Power Electronics Conference and Exposition, Anaheim, California, Vol.2, pp.1160-1164, February 22-26, 2004
[10]徐普恩,「超高電容應用於電動機車能量管理系統」,國立台灣大學,碩 士論文,民國九十 四年六月
[11]胡聰賢,「電動車輛續航力之提升與煞車回收能量管理」,國立台灣大學, 碩士論文,民國九十五年七月
[12]R. C. Becerra, T. M. Jahns and M. Ehsani, “Four-Quadrant Brushless ECM Drive with Integrated Current Regulation”, IEEE Transactions on Industry Applications, Vol. 28 Issue:4, July-Aug. 1992 p. 833-841
[13] M. Marchesoni, and C. Vacca, “New DC–DC converter for energy storage system interfacing in fuel cell hybrid electric vehicles,” IEEE Trans. Power Electron., vol. 22, no. 1, pp. 301-308, Jan. 2007
[14]周宏霖,「電動車之新型電子煞車暨能量回收方法」,國立中央大學,碩 士論文,民國九七年七月
[15]姜林政宏,「電動車輛扭力與煞車回充控制」,國立清華大學,碩士論文, 民國九五年七月
27
[16]劉晏銘,「以 DSP 為基礎的直流馬達電能回充之研製及其在電動機車上 的應用」,國立交通大學,碩士論文,民國九十年六月
[17] K. Y. Cheng and Y. Y. Tzou, “Design of a sensorless Commutation IC for BLDC Motors”, IEEE Transactions of Power Electronics, vol.18, no.6, pp.1365-1375, November 2003.
[18] H. C. Chen, Y. C. Chang, and C. K. Huang, “Practical sensorless control for inverter-fed BDCM compressors,” IET Proc. Electric Power Applications, vol. 1, no. 1,pp. 127-132, Jan. 2007
[19]徐舶強, 無感測直流無刷馬達之驅動電路設計, 國立交通大學機械工程 學系所, 碩士論文, 2008
28
表單
表2.1 逆時鐘轉動馬達轉子角度、霍爾訊號與開關切換關係表 霍爾訊號 開關訊號 狀態 轉子角度 H1 H2 H3 S1 S2 S3 S4 S5 S6 I 0∘~60∘ 1 0 0 PWM PWM II 60∘~120∘ 1 0 1 PWM PWM III 120∘~180∘ 0 0 1 PWM PWM IV 180∘~240∘ 0 1 1 PWM PWM V 240∘~300∘ 0 1 0 PWM PWM VI 300∘~360∘ 1 1 0 PWM PWM 表2.2 逆時鐘驅動馬達轉子角度、霍爾訊號與電流迴路關係表 Hall sensor[1 0 0] 轉子角度 0∘~60∘ Hall sensor[1 0 1] 轉子角度 60∘~120∘29
表2.2 逆時鐘驅動馬達轉子角度、霍爾訊號與電流迴路關係表(續)
Hall sensor[0 0 1] 轉子角度 120∘~180∘
Hall sensor[0 1 1] 轉子角度 180∘~240∘
30 表2.2 逆時鐘驅動馬達轉子角度、霍爾訊號與電流迴路關係表(續) Hall sensor[1 1 0] 轉子角度 300∘~360∘ 表2.3 回充模式霍爾訊號與開關切換時序表(單開關) 霍爾訊號 開關訊號 狀態 轉子角度 H1 H2 H3 S1 S2 S3 S4 S5 S6 I 0∘~60∘ 1 0 0 0 0 0 PWM 0 0 II 60∘~120∘ 1 0 1 0 0 0 PWM 0 0 III 120∘~180∘ 0 0 1 0 0 0 0 PWM 0 IV 180∘~240∘ 0 1 1 0 0 0 0 PWM 0 V 240∘~300∘ 0 1 0 0 0 0 0 0 PWM VI 300∘~360∘ 1 1 0 0 0 0 0 0 PWM 表2.4 霍爾訊號、電流迴路、馬達轉子位置關係表(單開關)
31
表2.4 霍爾訊號、電流迴路、馬達轉子位置關係表(單開關)(續)
Hall sensor[1 0 1] S5 Active
Hall sensor[0 0 1] S5 Active
32
表2.4 霍爾訊號、電流迴路、馬達轉子位置關係表(單開關)(續)
Hall sensor[0 1 0] S6 Active
Hall sensor[1 1 0] S4 Active
表2.5 回充模式霍爾訊號與開關切換時序表(雙開關) 霍爾訊號 開關訊號 狀態 轉子角度 H1 H2 H3 S1 S2 S3 S4 S5 S6 I 0∘~60∘ 1 0 0 0 0 PWM PWM 0 0 II 60∘~120∘ 1 0 1 0 0 PWM 0 PWM 0 III 120∘~180∘ 0 0 1 PWM 0 0 0 PWM 0 IV 180∘~240∘ 0 1 1 PWM 0 0 0 0 PWM V 240∘~300∘ 0 1 0 0 PWM 0 0 0 PWM VI 300∘~360∘ 1 1 0 0 PWM 0 PWM 0 0
33
表2.6 霍爾訊號、電流迴路、馬達轉子位置關係表(雙開關)
Hall sensor[1 1 0] S2、S6 Active
Hall sensor[1 0 0] S2、S4 Active
34
表2.6 霍爾訊號、電流迴路、馬達轉子位置關係表(雙開關)(續)
Hall sensor[0 0 1] S3、S5 Active
Hall sensor[0 1 1] S1、S5 Active
35
表3.1 MCU Pin腳分配表
用途 Analog/Digital Input/Output Pin 附註
Hall sensor Digital Input P0.0 H1
P0.1 H2
P0.2 H3
IR2110S(驅動 IC) Digital Output P1.0 U 相上臂
P1.1 U 相下臂 P1.2 V 相上臂 P1.3 V 相下臂 P1.4 W 相上臂 P1.5 W 相下臂 P1.6 SD P1.7 煞車 反電動勢檢測 Analog Input P2.0 U 相 P2.1 V 相 P2.2 W 相 電池電壓檢測 Analog Input P2.3
Analog 訊號輸入 Analog Input P2.5
控制面板按鈕 Digital Input P3.0~P3.5
回充電流檢測 Analog Input P3.7
36
圖列
圖 2.1 無刷直流馬達構造圖 圖 2.2 無刷直流馬達定子、轉子、霍爾感測器配置圖 I B d + _ VH 圖 2.3 霍爾效應37 圖 2.4 馬達與變頻器電路圖 圖 2.5 逆時鐘驅動霍爾訊號、開關切換訊號與三相電壓圖 U V W Phase current S6 VI III II S2 S1 S3 S4 S5 IV I HA HB HC V
38 圖 2.8 升壓型電壓轉換器 Vo C vL L iL Io Vd u(t) e(t) ω *(t) V*(t) Plant ω(t) DC MOTOR PID controller Ke Ke Vin(t) RM LM θ t(t) IM(t) Tt(t) Eemf(t) 圖 2.6 DC 馬達基本架構圖 圖 2.7 轉速控制方塊流 程圖
39 圖 2.9 開關切換時的等效電路圖 圖 2.10 連續導通模式與不連續導通模式電感電流圖 Δ 2Ts Δ 1Ts DTs t t (Vd-Vo) (Vd-Vo) iL iL vd vd vL vL 0 0 Ts toff ton (a) Ts (b) Vo toff ton Ts IL vL iL (Vd-Vo) (Vd) Vo C vL L C vL L Vd Vd 0
40 圖 2.11 馬達簡化示意圖 (a)S6 導通電流迴路 (b)簡化示意圖 圖 2.12 開關 S6 導通時電流迴路示意圖(單一開關) 圖 2.13 開關 S6 截止時電流迴路示意圖(單一開關) (a)S6 截止電流迴路 (b)簡化示意圖 Motor Driver Power
41 圖 2.14 反電動勢、霍爾訊號及開關切換時序圖(單開關) 圖 2.15 開關 S1、S6 導通時電流迴路示意圖(雙開關) S6 VI III II S5 IV VUV I V HA HB HC S1 S2 S3 S4 VVW VWU
42 圖 2.16 開關 S1、S6 截止時電流迴路示意圖(雙開關) 圖 2.17 反電動勢、霍爾訊號及開關切換時序圖(雙開關) VI III II S6 S2 S1 S3 S4 S5 V IV VUV VVW VWU I HA HB HC
43 圖 2.18 回充電路簡化示意及不連續導通模式電感電流波形圖 圖 2.19 回充電路簡化示意及連續導通模式電感電流波形圖 圖 3.1 實驗系統架構 PWM signal Battery C8051F340 Controller f Isensor
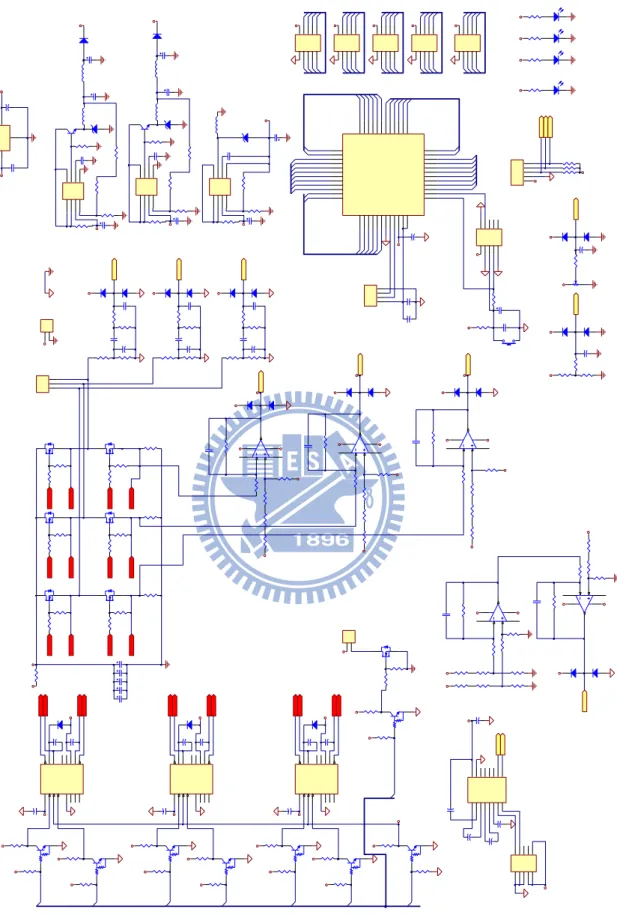
44 圖 3.2 驅動器電路圖 R4 100R Vdc 1 2 3 JP2 Motor D11N4934 +15V UG_A US_A LS_ALG_A UG_A UG_B US_B UG_C US_C LS_A LG_A LG_B LS_B LG_C LS_C US_A +15V 12 JP1 Power Vdc +3.3V +3.3V P2.2 P2.5 C3104 Q2 IRF3205 D291N4148 D261N4148 C41uF LO 1 COM 2 VCC 3 NC 10 VS 6 VB 7 HO 8 NC 9 VDD 11 HIN 12 SD 13 LIN 14 VSS 15 NC 16 NC 5 NC 4 U2 IR2110S R103RPot +48V~+12V Q1PDTC114EE +3.3V R14K7 +15V +3.3V +15V +15V UG_BUS_B LS_BLG_B +15V +3.3V +15V +3.3V +15V +15V UG_CUS_C LS_CLG_C +15V +3.3V +15V +3.3V +15V +15V P2.1 P2.0 +3.3V P2.3 D281N4148 D251N4148 Vdc 1 2 3 4 5 P4 Hall +15V R994K7 P0.0P0.1P0.2 +3.3V #RST/C2CLK 1 3 C2D 1 4 P4.7 1 5 P4.6 1 6 P4.5 1 7 P4.4 1 8 P4.3 1 9 P4.2 2 0 P4.1 2 1 P4.0 2 2 P3.7 2 3 P3.6 2 4 VBUS 12 REGIN 11 VDD 10 D-9 D+ 8 GND 7 P0.0 6 P0.1 5 P0.2 4 P0.3 3 P0.4 2 P0.5 1 P3.5 25 P3.4 26 P3.3 27 P3.2 28 P3.1 29 P3.0 30 P2.7 31 P2.6 32 P2.5 33 P2.4 34 P2.3 35 P2.2 36 P2.1 3 7 P2.0 3 8 P1.7 3 9 P1.6 4 0 P1.5 4 1 P1.4 4 2 P1.3 4 3 P1.2 4 4 P1.1 4 5 P1.0 4 6 P0.7 4 7 P0.6 4 8 U10C8051F340 GND +3.3V 1 2 3 4 P1 USB C40104 GND C39105 GND P0.0 P0.1 P0.2 P0.3 P0.4 P0.5 P0.6 P0.7 1 2 3 4 5 6 7 8 9 10 P2 Header 5X2 GND GND GND +3.3V S1 C50104 +3.3V C48105 P4.0 P4.1 P4.2 P4.3 P4.4 P4.5 P4.6 P4.7 P3.7 P3.6 P3.5 P3.4 P3.3 P3.2 P3.1 P3.0 P2.0 P2.1 P2.2P2.3P2.4P2.5P2.6P2.7 P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 P4.2 P4.4 P4.6 P4.0 P4.1 P4.7P4.5P4.3 +3.3V +3.3V P3.7P3.5P3.3P3.1 P3.6P3.4P3.2P3.0 +3.3V P2.6P2.4P2.2P2.0 P2.7P2.5P2.3P2.1 P1.6P1.4P1.2P1.0 P1.7P1.5P1.3P1.1 +3.3V 1 2 3 4 5 6 7 8 9 10 JP8 Header 5X2 P0.6P0.4P0.2P0.0 P0.7P0.5P0.3P0.1 +3.3V C51uF R24K7 R104K7 R134K7 Q6PDTC114EE LO 1 COM 2 VCC 3 NC 10 VS 6 VB 7 HO 8 NC 9 VDD 11 HIN 12 SD 13 LIN 14 VSS 15 NC 16 NC 5 NC 4 U5 IR2110S C241uF C271uF D91N4934 C19104 R274K7 R334K7 Q11PDTC114EE R414K7 R424K7 Q13PDTC114EE LO 1 COM 2 VCC 3 NC 10 VS 6 VB 7 HO 8 NC 9 VDD 11 HIN 12 SD 13 LIN 14 VSS 15 NC 16 NC 5 NC 4 U8 IR2110S D161N4934 C371uF C381uF C35104 R564K7 R574K7 R604K7 R614K7 Q14PDTC114EE Q15PDTC114EE Q18PDTC114EE R704K7 R724K7 R1004K7 R1014K7 R18 100R R224K7 Q7 IRF3205 R5 100R Q3 IRF3205 R84K7 R6 100R Q4 IRF3205 R94K7 R234K7 Q8 IRF3205 R19 100R R20 100R R244K7 Q9 IRF3205 R9820K R1091K R105 1K C53104 R106 1K C52104 R831K R85 1K C42104 1 2 3 4 5 6 7 8 9 10 JP7 Header 5X2 1 2 3 4 5 6 7 8 9 10 JP6 Header 5X2 1 2 3 4 5 6 7 8 9 10 JP4 Header 5X2 1 2 3 4 5 6 7 8 9 10 JP3 Header 5X2 +15V Q17PDTC114EE R664K7 R674K7 +3.3V R69 100R Vdc Q16 IRF3205 R714K7 GND1 12 JP5 Brake Vdc R9220K D22 +5V R93220 D23 +3.3V R94220 D24 P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 R74K7 C1+ 1 V+ 2 C1-3 C2+ 4 C2-5 V-6 T2out 7 R2in 8 R2out 9 T2in 10 T1in 11 R1out 12 R1in 13 T1out 14 GND 15 Vcc 16 MAX3232CPE 1 2 3 4 5 6 7 8 9 10 P3 Header 5X2 +5V C49105 C47105 C45105 C44 105 +3.3V C46105 GND GND1 SD +15V R9110K D21 1234 5 6 7 8 U3 MC34063 R171K2 R14 2K4 Vdc R120.5R C9 10uF/63V C6470pF R111K Q5D476 D3 1A C8 220uF/63V C7 220uF/63V L2 200uH L1 200uH D2 +5V 1234 5 6 7 8 U6 MC34063 R5110K R48 1K Vdc R450.22R C32 100uF/63V C29360pF D111A C311000uF/16V L5 220uH -15V 1234 5 6 7 8 U4 MC34063 R371K2 R35 12K Vdc R320.5R C23 10uF/63V C18470pF R311K Q10D476 D7 1A C21 220uF/63V C20 220uF/63V L4 200uH L3 200uH D6 +15V +5V C2470pF C133uF +3.3V GND1 R2810m R2910m R3010m R52 1k R43 15k 6 3 2 7 4 1 5 U7TLE2021CD +15V -15V C28 470pF R58100K IU R55 8k2 +15V -15V R62 1k R59 15k 6 3 2 7 4 1 5 U9TLE2021CD +15V -15V C36 470pF R68100K IV R65 8k2 +15V -15V R77 1k R73 15k 6 3 2 7 4 1 5 U11TLE2021CD +15V -15V C41 470pF R84100K IW R80 8k2 +15V -15V R3 10m V-R86 2K R76 150K R10210K R11218K R1131K 6 3 2 7 4 1 5 U13TLE2021CD +15V -15V C43 470pF 6 3 2 7 4 1 5 U15TLE2021CD GND1 +15V +15V -15V R97 10K C51 470pF D271N4148 D301N4148 GND +3.3V V-Vdc R872K R88150K GND1 P3.7 P3.2P3.3 P3.1 P3.4 P3.5 R15470K R2547K C10 2.2uF C162.2uF R2630K R16470K C170.47uF +3.3V D51N4148 D41N4148 R34470K R3847K C22 2.2uF C252.2uF R3930K R36470K C260.47uF +3.3V D101N4148 D81N4148 R46470K R4947K C30 2.2uF C332.2uF R5030K R47470K C340.47uF +3.3V D141N4148 D121N4148 R81200K R89100K R82200K R90100K GND1 GND1 D201N4148 D191N4148 D181N4148 D171N4148 D151N4148 D131N4148 +3.3V +3.3V +3.3V GND GND GND C11100uF C12100uF C13100uF C14100uF C15100uF R54 8k2 R53 82k R64 8k2 R79 8k2 R63 82k R78 82k P0.0P0.1P0.2 P2.5 P2.3 P2.2 P2.1 P2.0 P3.2P3.3 P3.7 R110 1K R74200K R75200K R21 1K2 R40 1K2 IN 1 OUT 3 2 GND U1 LM3940IT-3.3 GND GND1
45 圖 3.3 C8051F340 內部架構圖 圖 3.4 DC-DC 電壓轉換器電路圖 IN 1 OUT 3 2 GND U1 LM3940IT-3.3 +5V C2 470pF C1 33uF +3.3V GND 1 2 3 4 5 6 7 8 U3 MC34063 R17 1K2 R14 3.6K Vdc R12 0.5R C15 10uF/63V C6 470pF R11 1K Q5 D476 D3 1A C13 220uF/63V C7 220uF/63V L2 200uH L1 200uH D2 +5V 1 2 3 4 5 6 7 8 U6 MC34063 R49 13K2 R46 1K2 Vdc R43 0.5R C38 10uF/63V C34 470pF R42 1K Q12 D476 D11 1A C37 220uF/63V C36 220uF/63V L6 200uH L5 200uH D12 -15V 1 2 3 4 5 6 7 8 U4 MC34063 R36 1K2 R34 13.2K Vdc R31 0.5R C28 10uF/63V C23 470pF R30 1K Q10 D476 D7 1A C27 220uF/63V C25 220uF/63V L4 200uH L3 200uH D6 +15V
46 圖 3.5 霍爾感測器電路圖 圖 3.6 IR2110 驅動電路 圖 3.7 IR2110 內部架構圖 1 2 3 4 5 P4 Hall + 15 V R88 10 0R P0.0 P0.1 P0.2 +3.3V R89 10 0R R90 10 0R D 1 1N4934 +15V UG_A LS_A LG_A US_A +15V C 3 104 C4 1uF LO 1 C OM 2 VCC 3 NC 10 V S 6 VB 7 HO 8 NC 9 VD D 11 HIN 12 SD 13 LIN 14 VSS 15 NC 16 NC 5 NC 4 U 2 IR2110S Q1 PDTC114EE +3.3V R1 100R +15V +3.3V +15V C5 1uF R 2 100R R10 100R R13 100R Q 6 PDTC114EE P1.0 P1.1
47 圖 3.8 bootstrap 架構圖 圖 3.9 平均回充電流訊號量測電路 V+ V1 V2 V’ R86 2K R76 150K R102 10K R112 18K R113 1K 6 3 2 7 4 1 5 U13 TLE2021CD +15V -15V C43 470pF 6 3 2 7 4 1 5 U15 TLE2021CD G N D 1 +15V +15V -15V R97 10K C51 470pF D27 1N4148 D30 1N4148 G N D +3.3V V -Vdc R87 2K R88 150K G N D 1 P3.7 R81 200K R89 100K R82 200K R90 100K G N D 1 G N D 1 P3.7 R110 1K R74 200K R75 200K R 3 10m (a) (b)
48 圖 3.10 電池電壓量測電路 圖 3.11 控制面板電路圖 G N D 6 3 2 7 4 1 5 U15 TLE2012CD +15V -15V R92 3K R85 4K4 R96 4K4 R98 3K +15V Vdc P3.0 dp 3 g 5 f 10 e 1 d 2 c 4 b 7 a 11 COM1 12 COM2 9 COM3 8 COM4 6 Seven Segment1 CA +3.3V +3.3V +3.3V +3.3V +3.3V R70 220 SegA SegB SegC SegD SegE SegF SegG SegH +3.3V R83 10K D23
SegA SegB SegC SegD SegE SegF SegG SegH
S2 SegA SegB SegC SegD SegE SegF SegG SegH R71 220 R72 220 R74 220 R75 220 R76 220 R78 220 R79 220 S3 S4 S5 S6 D24 D25 D26 D27 D28 D29 D30 P4.0 P4.1 P4.2 P4.3 P4.4 P4.5 P4.6 P4.7 P3.0 P3.1 P3.2 P3.3 P3.4 P3.5 Q1 9012 Q2 9012 Q3 9012 Q4 9012 Q5 9012 R5 10k R4 10k R3 10k R2 10k R1 10k P4.2 P4.4 P4.6 P4.0 P4.1 P4.7 P4.5 P4.3 +3.3V +3.3V P3.7 P3.5 P3.3 P3.1 P3.6 P3.4 P3.2 P3.0 1 2 3 4 5 6 7 8 9 10 JP3 Header 5X2 1 2 3 4 5 6 7 8 9 10 JP4 Header 5X2 D1 1A D2 1A D3 1A D4 1A D5 1A
49
圖 4.1 電路模擬圖
50
圖 4.3 D=0.2,F=4k Hz 回充電流、平均回充電流波形圖
51
圖 4.5 D=0.4,F=2k Hz 回充電流、平均回充電流波形圖
52
圖 4.7 D=0.4,F=8k Hz 回充電流、平均回充電流波形圖
53
圖 4.9 D=0.6,F=16k Hz 回充電流、平均回充電流圖
54
圖 4.11 D=0.8,F=8k Hz 回充電流、平均回充電流圖
55 圖 4.13 驅動器電路板(正面) 圖 4.14 驅動器電路板(背面) DC-DC converter Driver IC IR2110 電源 Hall sensor 接線 馬達 UVW 三相接線 C2 debug 連 接阜 USB port 六橋開關(IRF3205) Shunt 電阻 DC-DC converter 可變電阻 提供類比輸入 MCU