國
立
交
通
大
學
電機學院 電信學程
碩
士
論
文
高移動性 OFDM 系統中基於多項式模型及
最小平均方差等化器之通道估計與資料偵測方法
Joint Channel Estimation and Data Detection
Based on Polynomial Model and MMSE Equalization
for High-Mobility OFDM Systems
研 究 生:陳 韻 文
指 導 教 授:黃 家 齊 博士
高移動性OFDM系統中基於多項式模型及
最小平均方差等化器之通道估計與資料偵測方法
Joint Channel Estimation and Data Detection
Based on Polynomial Model and MMSE Equalization
for High-Mobility OFDM Systems
研 究 生:陳韻文 Student:Yunn-Wen Chen 指導教授:黃家齊 博士 Advisor:Dr. Chia-Chi Huang
國 立 交 通 大 學
電機學院 電信學程
碩 士 論 文
A Thesis
Submitted to College of Electrical and Computer Engineering National Chiao Tung University
in partial Fulfillment of the Requirements for the Degree of
Master of Science in
Communication Engineering August 2007
Hsinchu, Taiwan, Republic of China
高移動性 OFDM 系統中基於多項式模型及
最小平均方差等化器之通道估計與資料偵測方法
學生:陳韻文 指導教授:黃家齊博士 國 立 交 通 大 學 電 機 學 院 電 信 學 程 碩 士 班 摘 要 對於應用於高移動通訊環境之正交分頻多工(Orthogonal Frequency Division Multiplexing, OFDM)系統,每一個 OFDM 符元期間的通道時變破壞 了次載波間的正交性,導致載波間干擾(Inter-carrier Interference, ICI)發生且使得效能衰降。當載具速度、載波頻率、OFDM 符元期間增加, 影響將更形嚴重。此也是目前產學界正努力思考如何降低 ICI 的研究課題。 在這篇論文,我們提出一個基於多項式參數通道模型及最小平均方差 (Minimum Mean Square Error, MMSE)等化器做為資料決策的方法。推導此 方 法 是 結 合 通 道 估 計 與 資 料 偵 測 的 問 題 , 以 最 大 可 能 性 (Maximum Likelihood, ML)估計架構公式化,以及使用牛頓法最佳化理論,去找到一 個搜尋方向向量做為更新二階多項式通道路徑參數,然後再求出通道頻率 響應及利用 MMSE 法則做資料決策,來達到抑制 ICI 效應的目的。本文接續 著實驗室學長之前的研究,為顧及完整性,也對該研究中兩級通道估計方 法及改進做一詳盡之描述。電腦模擬結果驗證了提出方法在高移動性射頻 多路徑衰減通道的效能增進。Joint Channel Estimation and Data Detection
Based on Polynomial Model and MMSE Equalization
for High-Mobility OFDM Systems
student:Yunn-Wen Chen Advisors:Dr. Chia-Chi Huang
Degree Program of Electrical and Computer Engineering
National Chiao Tung University
ABSTRACT
For an orthogonal frequency division multiplexing (OFDM) systems applied in high mobility communication environment, time-variations of multi-path channel in one OFDM symbol duration destroys the orthogonality among subcarriers, resulting in intercarrier interference (ICI) and performance degradation. The affect becomes more severe when vehicle speed, carrier frequency or OFDM symbol interval increases. In this paper, a joint channel estimation and data detection method based on polynomial parametric channel model and MMSE equalization is proposed. We derive this method by formulating the joint channel estimation and data detection problem in a maximum likelihood estimation framework and adopt Newton’s method to find a search direction vector that is used to update the second order polynomial channel parameter, then utilize the MMSE equalization to achieve the purpose of ICI suppression. Computer simulation results are provided to verify the performance of the proposed method in high-mobility radio multipath fading channels.
誌
謝
通訊科技一日千里,眾多學者投入研究的行列,使得通訊知識體系日 益博大精深。感謝學校開闢在職進修的學習管道,讓我有幸能進入本校學 習通訊工程,一圓研究生之夢,使我更加珍惜這個寶貴之學習機會,雖然 辛苦,但亦是值得的。 何其有幸承蒙黃家齊老師厚愛,願意收為學生,不僅為我授業解惑,更 對於我的學習及研究,殷切給予溫暖的關懷及諸多勉勵,從他的一言一行 中,讓我感受到老師儒者的風範以及對研究的熱情,在此表達對老師深深 地感謝。 做為一個通訊初學者,我時常遇到困難,幸運的是,在實驗室博士班學 長及同學的協助下,使我得以突破學習瓶頸。尤其要感謝博士班古孟霖學 長長時間在課業、程式、論文上給予指導,也很感謝香君、旺旺、友財、 慈惠等諸學長對我提出任何疑問,都能耐心解說,不僅有問必答,還提供 詳細資料。對於所有曾經幫忙我的同學,在此也一併致謝。 最後,我將此論文獻給母親及太太,感謝她們長期支持,願她們平安喜 樂,也向我心愛的三個孩子說聲抱歉,少了陪他們的時間,願他們快樂健 康功課進步。
目
錄
中文摘要………i 英文提要………ii 誌謝………iii 目錄………iv 圖目錄………vi 第一章 簡介………1 第二章 系統模型………5 2.1 正交分頻多工系統傳送的訊號………5 2.2 通道模型………6 2.3 接收的訊號………8 2.4 載波間干擾之分析推導………9 第三章 結合通道估計與資料偵測之載波干擾減緩方法………13 3.1 IEEE 802.16e 之訊框格式………13 3.2 通道資訊之初始估計………15 3.3 通道變化精確的追蹤方法………18 3.4 載波間干擾減緩之方法………28 第四章 電腦模擬………38 4.1 系統參數………38 4.2 模擬結果………39 第五章 結論及未來努力方向………50
5.1 結論………50
5.2 未來努力方向………51
參考文獻………52
圖 目 錄
圖 2.1 正交分頻多工系統基頻等效模型………5
圖 2.2 多重路徑衰減通道模型成 Tapped-delay line filter 之結構……7
圖 2.3 多重路徑之時變離散等效基頻脈衝響應的一個例子………8
圖 2.4 接收信號、通道脈衝響應及傳送信號三者之循環迴旋關係………9
圖 3.1 IEEE Std 802.16e OFDM 訊框格式………13
圖 3.2 正交分頻多工次載波配置之頻率描述………13 圖 3.3 通道估計程序摘要………15 圖 3.4 基於去相關之多重路徑干擾消除方法………17 圖 3.5 通道變化追蹤方法所有程序之摘要………27 圖 3.6 減緩載波間干擾所有程序之摘要………37 圖 4.1 系統模擬參數………39 圖 4.2 在雙路徑衰減通道、車速 120km/hr 下的位元錯誤率………42 圖 4.3 在雙路徑衰減通道、車速 240km/hr 下的位元錯誤率………43 圖 4.4 在雙路徑衰減通道、車速 300km/hr 下的位元錯誤率………44 圖 4.5 在 ITU-Veh.B 六路徑衰減通道、車速 120km/hr 下的位元錯誤率…45 圖 4.6 在 ITU-Veh.B 六路徑衰減通道、車速 240km/hr 下的位元錯誤率…46 圖 4.7 在 ITU-Veh.B 六路徑衰減通道、車速 300km/hr 下的位元錯誤率…47 圖 4.8 在雙路徑通道 Np 分別設為 2 及 4 之效能比較………48 圖 4.9 在 ITU-Veh.B 六路徑通道 Np 分別設為 6 及 8 之效能比較…………49
第一章
簡介
傳統的數位式單載波(Single Carrier)通訊系統,在無線通訊的環境做高 速率資料傳輸,傳送的信號因多重路徑(Multipath)現象所形成的延遲擴展 (Delay Spread)效應,也就是頻率選擇性衰減通道(Frequency Selective Fading Channel),使得接收端收到了許多版不同延遲的信號,造成了碼際間干擾 (Inter-Symbol Interference, ISI),導致系統的資料傳輸可靠度(以位元錯誤率 BER 來定義)效能降低。然而欲提高系統效能,卻使得等化器之實作更加複 雜與困難。正交分頻多工(Orthogonal Frequency Division Multiplexer, OFDM) 正是針對 ISI 問題所提出的一個有效調變技術[1]。它是藉由加入循環前綴 (Cyclic Prefix, CP)的方式,亦即將每一個 OFDM 符元(Symbol) 後段取大於 等 於 最 大 延 遲 擴 展 (Maximum Delay Spread) 長 度 的 資 料 複 製 及 擺 到 該 OFDM 符元前頭,作為與前一 OFDM 符元之間的護衛間隔(Guard Interval)。 假設接收端時序(Timing)及載波頻率同步(Synchronization)已做好的情形 下,收到的信號可無誤的移除循環前綴 CP,接著利用快速傅立葉轉換 FFT 做解調後所得到頻率域各個次載波(Sub-carrier)上的數值,分別等於各個傳 送次載波資料乘以通道增益再加上雜訊(AWGN Noise)項而已,這很容易藉 由簡單設計的等化器就能恢復原傳送資料並達到很好的效能。然而,通訊
系統的傳收機(Transceiver)不單是祇應用於靜止的環境,也要考慮能在高速 移動之行動通訊環境裡提供良好的傳輸可靠度方為所需。此時因為高移動 性 引 入 的 都 卜 勒 頻 率 擴 展 (Doppler spread) , 亦 即 時 間 選 擇 性 (Time-Selectivity),卻成為 OFDM 的最大致命傷,在每一個 OFDM 符元期 間 (Symbol Duration) 的 多 重 路 徑 通 道 增 益 不 再 維 持 不 變 , 通 道 時 變 (Time-variations)破壞了次載波之間的正交性(Orthogonality),導致載波間干 擾 ICI(Inter-carrier Interference)的發生(也就是能量洩露到相鄰的數個次載波 上)且使得效能降低。此效應隨著車輛速度、載波頻率、OFDM 符元長度的 增加,對系統效能影響將會更嚴重。因此,對抑制 ICI 效應期能改善效能正 是 目 前 通 訊 界 許 多 研 究 者 努 力 的 研 究 課 題 。 在 論 文 [2] 中 是 以 差 動 (Differential)方式,把每一資料點(BPSK 或是 QPSK 調變)分別一正一負載至 相鄰的次載波上,達到在其他次載波位置上所造成的干擾互相抵消,然而 卻浪費了一半頻寬,大大的降低頻寬效率(Bandwidth efficiency)。[3]提出了 在頻率域等化技巧的平行消除機制,採取兩級裝置分別為前濾波器做資料 初始判斷及 ICI 消除濾波器做干擾消除,他是運作於假設通道脈衝響應在一 個 OFDM 期間是線性變化,然而當通道變化為非線性時,將使得系統效能 降低。[4]提出了以片段方式(Piece-Wise)線性模型去近似通道變化,然而在 高速移動時,片段方式線性近似與實際通道變化仍有差距。 這篇論文是以本實驗室博士班古孟霖學長之前發表在 IEEE 上的論文[8]
做為基礎,對於 IEEE 802.16e WMANs [6] 的系統規格下,接續著發展在高 移動性環境下 OFDM 系統如何更精確地估測通道的時變性,進而達到抑制 ICI 效應所做的研究。首先將該篇論文的通道估計方法描述如后,他提出兩 級通道估測方法,其通道模型是假定在一個 OFDM 符元期間之多重路徑複 數增益為固定,亦即各個路徑變化之平均值。在初始級,採用以多重路徑 干 擾 消 除 (Multi-path Interference Cancellation, MPIC) 為 基 礎 的 去 相 關 (De-correlation)法來估得多重路徑延遲(Multi-path delays)、路徑數目、多重 路徑複數增益等通道參數;在追蹤級,以初始級估得的通道資訊,提出了 一個基於參數通道模型結合通道估計與資料偵測[7] [8] [10] [11],並公式化 為最大可能性(Maximum Likelihood, ML)估計架構及使用牛頓法則最佳化 理論[9]的方法,作為估測在該 OFDM 時槽內多重路徑增益平均值。然而根 據最佳化理論得知,牛頓法是屬於局部最佳化搜尋(Local optimization search) 並不是總體最佳化搜尋(Global optimization search)。尤其是在通道變化大時 僅靠牛頓法是無法追得通道變化,故需輔以另一方式[8]來達到可靠的通道 估計。於是我們利用安插在 OFDM 資料符元(Data Symbol)中的數個領航碼 去產生第一次反覆(Iteration)的最佳更新梯度相量,目的是找到一個搜尋方 向向量協助更密切地追蹤通道變化,而接下來的數次反覆則用牛頓方法做 精確的通道平均增益估計。
值估計,由之後 2.4 節分析得知,此參數模型是無法獲知 ICI 所造成的影響。 於是我們接著提出了一個更精密的二階多項式參數通道模型以及採用最小 平均方差(MMSE)等化器做資料偵測,再次運用了前述的結合通道估計與資 料偵測使之公式化為最大可能性(Maximum Likelihood, ML)估計架構的方 式,使用牛頓法推導出最佳梯度相量,更新二次多項式通道路徑參數,然 後再求出等效通道頻率響應 CFR(channel frequency response)矩陣及利用 MMSE 法則做資料偵測,來達到抑制 ICI 效應的目的。 在這篇論文中所使用到的符號說明如後,習慣上,粗體字代表矩陣、 行向量、集合。上標(·)*表示複數共軛,(·)H及(·)T分別表示 Hermitian 和轉置, (·)I 及(·)Q 分別表示(·)的實部和虛部。行向量 x 被表示成 x0,…,xx−1 或
{
}
: 0, , 1 i x i∈ … x − ,其中 x 是向量 的維度(Dimension)。x{
}
表示一個集 合(Set),例如為一集合x={
x0,…,xx−1}
,其中 x 表示為此集合 的基數 (Cardinality),亦即集合中元素的個數。 x第二章
系統模型
2.1 正交分頻多工系統傳送的訊號
+ IFFT S/P Serial Input data P/S ( )i nh
AWGN noise 0 X 1 X 1 N X− 0 x c p x 1 x 1 N x− i w S/P FFT 0 r cp r 1 r 1 N r− 0 R 1 R 1 N R− EQ P/S 0 ˆ X 1 ˆ X 1 ˆ N X− 圖 2.1 正交分頻多工系統基頻等效模型 如圖 2.1 OFDM 系統基頻等效模型所示,欲傳送之二位元資料由四相移 鍵(QPSK)調變成複數串列資料符元後經串列轉並列 S/P(Serial to Parallel)送 入有 N 個次載波之 OFDM 系統,此系統中有 M 個次載波被使用傳送領航符 元及資料符元,其他 N-M 個在 OFDM 兩邊的次載波被用做 DC 及虛次載波, 也就是設為 0 不傳送任何信號,主要目的是為了避免頻率混疊(Aliasing)問 題,因而稱為護衛頻帶(Guard band)。在第 i 個時槽,插入 N-M 個 0 做 DC 及虛次載波後,|Q|個 QPSK 資料符元Xk, k∈Q 及 J(
=M − Q)
領航符元 所組合成的頻域符元(Frequency-domain Symbol)經由 N 點反快速 傅立葉轉換(Inverse Fast Fourier Transform, IFFT)單元產生時域取樣點 (Time-domain Samples)(如 2.1 式),此處的 Q、J 分別表示為資料及領航次,
k
載波索引的集合,且Q J, ⊆Ω,Ω=
{
0,…,N −1}
是全部次載波索引的集合。{ }
2 1 0 1 = , 0 1. i k j ki N N k k x IFFT X X e i N N π − = = ≤ ≤ −∑
(2.1) 其中X 表示在第 k 個次載波傳送的資料符元,k x 即為時域的取樣系列。為i了 避 免 多 重 路 徑 通 道 (Multipath Channel) 造 成 碼 際 干 擾 (InterSymbol Interference, ISI),於時域取樣系列的前端加入了循環前綴 CP (Cyclic Prefix)
:
cp = x Ni − ≤ ≤G i N −
x 1 , (2.2)
其中 是護衛間隔(guard interval)長度,並且假設最大延遲擴展(maximum delay spread)被取樣週期(sampling period)正規化(normalized)後之通道長度 總是小於G,才能確保移除護衛間隔後,不致仍然存在著碼際干擾之問題。 至此便完成了一個 OFDM 資料符元之產生。而每一個傳送 OFDM 訊框 (Frame)是由第一個已加了循環前綴(CP)佔去一個 OFDM 長度的領航先導碼 作起首接著 D 個連續 OFDM 資料符元所組成。 G
2.2 通道模型
對於行動無線多重路徑衰減通道其等效複數基頻脈衝響可以被表示為 [12][ ]
1( )
0 , [ L l l h tτ
μ
tδ τ τ
l] − = =∑
− , (2.3) 其中 L 為可解析的路徑數目;τl是第 l 路徑的延遲量(以取樣點數目為單 位);δ τ
[ ]
表示脈衝函數(Kronecker delta function);μ
l( )
t 是第 l 路徑之複數 高斯衰減增益(complex Gaussian fading gain);假設所有 L 條路徑彼此都是互 為獨立的。再就此通道之離散型式脈衝響應可以被模型成分接延遲線濾波 器(Tapped-delay line filter)[15]之架構,如圖 2.2。∑
( ) 0 i h 1( ) i h 2( ) i h ( )1 i G h −∑
∑
i x (( )1) N i x − (( )2) N i x − (( 1)) N i G x − + i r i w∑
1 Z− 1 Z− 圖 2.2 多重路徑衰減通道模型成 Tapped-delay line filter 之結構假定T 為取樣週期,則離散時間通道時變脈衝響應s h 表示在n( )i t = × 瞬間第i Ts 分接點(tap)之增益。一般來說,多重路徑是由幾條主要延遲路徑 所構 成。 n L ( )i n h 對於 及 分別表示在護衛及資料時間區段的第 個分接點之增益。圖 2.3 為說明多重路徑之時變離散等效基頻脈衝響應的一 個例子。 1 G i − ≤ ≤ − 0≤ ≤ −1i N n
於是(2.3)式的基頻脈衝響應其通道頻率響應可表示成
[ ]
1( ) {
}
0 , exp 2 L l l / l H t kμ
t jπ τ
k N − = =∑
− (2.4) 其中k是次載波索引。 t[ ]
, h tτ
2τ
τ
3τ
4τ
N−2τ
N−1( )
t0τ
( )
t1τ
( )
t2τ
( )
t3τ
0 t 1 t 2 t 3 t 1τ
0τ
圖 2.3 多重路徑之時變離散等效基頻脈衝響應的一個例子2.3 接收的訊號
我們假定在接收端時序及載波頻率兩者都已做好完全同步之條件下, 且通道脈衝響應的長度總是小於 CP 長度,於是可以正確地移除了循環前綴 CP (Cyclic Prefix),因此在快速傅立葉轉換(Fast Fourier Transform, FFT) 解調變(demodulator)單元輸入端之接收信號是為傳送信號與通道脈衝響 應之循環迴旋(Circular Convolution)關係,如下式:( )
(
(
)
)
1 0 0 G i i n N i n r h x i n w i N − = 1 =∑
− + ≤ ≤ − , (2.5) 其 中( )
( )
N i 表 示 以 N 為 基 底 之 循 環 移 位 , 為 加 性 白 色 高 斯 雜 訊 AWGN(Additive White Gaussian Noise)之取樣。圖 2.4 描述了接收信號、通 道脈衝響應及傳送信號三者之循環迴旋(Circular Convolution)關係 i w # tap\time i= 0 i= 1 i= 2 … i=N − 1 0 n= h x00 0 1 0 1 h x 2 0 2 h x … 1 0 1 N N h − x − 1 n = h x10 N−1 1 1 0 h x 2 1 1 h x … 1 1 2 N N h − x − 2 n= h x20 N−2 1 2 N 1 h x − 2 2 0 h x … 1 2 3 N N h − x − n= G h xG0 N G− 1 1 G N G h x − + h xG2 N G− +2 … hGN−1xN G− −1 圖 2.4 接收信號、通道脈衝響應及傳送信號三者之循環迴旋關係2.4 載波間干擾之分析推導
前節所述的時域接收信號(如 2.5 式)經 FFT 解調變(Demodulator)後之 頻域信號為{ }
1 2 0 j ik N N k i i i R FFT r re π − − = = =∑
(2.6) 依次代入 2.1、2.3、2.5 式至 2.6 式中並整理如下( ) ( ) ( ) ( ) (( )) ( ) ( ) 2 2 1 1 1 0 0 0 2 2 1 1 1 0 0 0 2 2 1 1 1 0 0 0 1 1 N N j ik j ik N G N i N N k n i n i i n i j m i n j ik N G N i N N n m i n m j i k m j mn G N N i N N m n k n m i R h x e w e h X e e N X h e e W N π π π π π π − − − − − − = = = − − − − − = = = − − − − − − = = = = + k W = + = +
∑∑
∑
∑∑
∑
∑∑ ∑
(2.7) 其中 為 之離散傅立葉轉換(DFT)。等式右邊第一項中的 做變數 變換令 k W wi (k− )m(
)
(
)
N d = k−m ,並且做以 為基底之循環移位(Cyclic Shift),目的是 把接收次載波之絕對指標(index) 與傳送次載波之絕對指標 兩者之差化 為與接收次載波絕對指標k之相對指標 ,例如當 N k m d m=k時,則d =0; m=0 時,則d =k;m=N −1時,則d = +k 1;其餘以此類推。接著如下之推導:[ ]
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 2 2 1 1 1 0 0 0 1 0 1 0 2 1 0 of 1 1 1 N N n j n k d j id N G N i N N n k d k d n i i i N n G N N N k k d k n d n ICI j nk G N n n DFT h R k h e e X W N e X e X W N e h e N π π π − − − − − − − = = = − 1 2 1 1 1 2 2 0 0 j n k d j j id N nk G N i i n h h π π π − − − − − − − = = = − − = = = + = + + =∑∑ ∑
∑
∑∑
∑
− − =∑
∑
( )
( ) (( )) ( ) ( ) 2 1 1 1 0 1 ,0 , 1 1 0 1. N N j n k d N G N k k d k d n ICI N k k k d k d k d I n CI X F d e X W N H X H X W k N π − − − = = − − = + + = + + ≤ ≤ −∑∑
∑
(2.8) − − 我們發現右邊第一項為該傳送次載波資料乘以多重路徑增益平均值(以 n h 表示)之截去傅立葉轉換(Truncated DFT),為不受其他次載波干擾之項。 然而第二項為其餘次載波對第k個次載波所造成的載波間之干擾量,亦即是由於高移動性所引起的都卜勒擴展(Doppler spread)使得每一個次載波之傳 送能量洩漏(Leakage)到其他次載波上所造成的干擾。該推導中定義
( )
1 ( ) 2 0 j id N i N n n i F d h e π − − = =∑
, (2.9) 是為第n路徑通道脈衝響應之離散傅立葉轉換(DFT);接著定義( )
2 ( ) 1 , 0 1 G j n k d N k d n n H F d e N π − − − = =∑
(2.10) 是相對於 之第 個傳送次載波頻帶對第 個接收次載波頻帶的通道頻率 響應,其大小成分為把每一路徑第 個次載波頻率響應乘以一相移(Phase Shift)因子後做加總再平均。於是把(2.8)式寫成矩陣型式如下 k d k d 0,0 0, 1 0, 2 0,1 0 0 0 1,1 1,0 1, 1 1,2 1 1 1 1, 1 1, 2 1, 3 1,0 1 1 1 eq N N N N N N N N N N N N N H H H H Y X H H H H Y X H H H H Y X − − − − − − − − − − − − − = + ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎢ ⎥ ⎢ ⎥= ⎢ ⎥ ⎢+ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ Y H X W W W W ⎤ ⎥ ⎥ ⎥ ⎥ ⎦ (2.11) 可清楚地看出其非對角線上的元素即為造成載波間干擾之頻率響應。當通 道為非時變(Time-invariant)時或假設在一個 OFDM 符元期間通道變化是幾 乎靜止(Quasi-satic),hn( )i 是一固定之複數衰減增益,亦即不隨時間 i 變化, 其上標(i)可被省略為hn,使得(2.8)式第二項為 0,亦即在(2.11)式矩陣中非對角線項皆為0,也就是簡化成對角矩陣表示沒有 ICI成份,則(2.8)最下式 將被縮減為Rk =H Xk k。
第三章 結合通道估計與資料偵測之載
波干擾減緩方法
3.1 IEEE 802.16e 之訊框格式
pilot preamble 1st OFDM symbol 2nd OFDM symbol Dth OFDM symbol
圖 3.1 IEEE Std 802.16e OFDM 訊框格式
圖3.1為 IEEE Std 802.16e OFDM調變之訊框格式(Frame format),每個
訊框的第一個OFDM符元是領航前導(Pilot preamble),其後接著77個資料
符元,每個OFDM次載波配置之頻率描述如下圖:
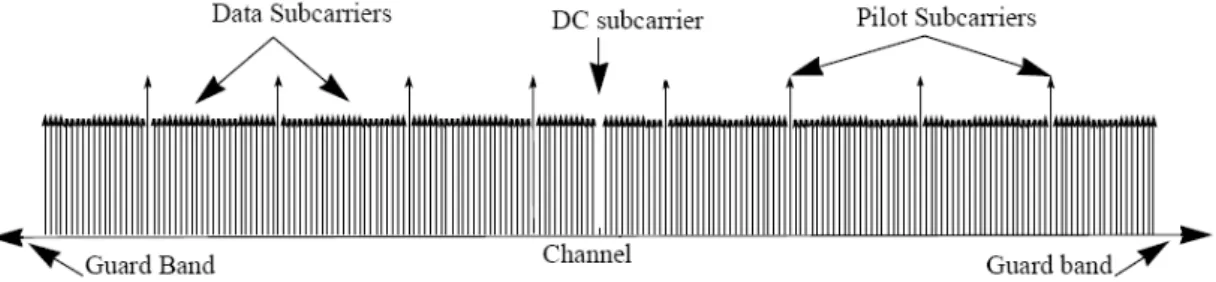
圖 3.2 正交分頻多工次載波配置之頻率描述
ALL P ( 100 :100) {1-j, 1-j, -1-j, 1+j, 1-j, 1-j, -1+j, 1-j, 1-j, 1-j, 1+j, -1-j, 1+j, 1+j, -1-j, 1+j, -1-j, -1-j, 1-j, -1+j,... 1-j, 1-j, -1-j, − = … 1+j, 1-j, 1-j, -1+j, 1-j, 1-j, 1-j, ... 1+j, -1-j, 1+j, 1+j, -1-j, 1+j, -1-j, -1-j, 1-j, -1+j,... 1-j, 1-j, -1-j, 1+j, 1-j, 1-j, -1+j, 1-j, 1-j, 1-j,... 1+j, -1-j, 1+j, 1+j, -1-j, 1+j, -1-j, -1-j, 1-j, -1+j,... 1+j, 1+j, 1-j, -1+j, 1+j, 1+j, -1-j, 1+j, 1+j, 1+j,... -1+j, 1-j, -1+j, -1+j, 1-j, -1+j, 1-j, 1-j, 1+j, -1-j,... -1-j, -1-j, -1+j, 1-j, -1-j, -1-j, 1+j, -1-j, -1-j, -1-j,... 1-j, -1+j, 1-j, 1-j, -1+j, 1-j, -1+j, -1+j, -1-j, 1+j, 0,... -1-j, 1+j, -1+j, -1+j, -1-j, 1+j, 1+j, 1+j, -1-j, 1+j,... 1-j, 1-j, 1-j, -1+j, -1+j, -1+j, -1+j, 1-j, -1-j, -1-j,... -1+j, 1-j, 1+j, 1+j, -1+j, 1-j, 1-j, 1-j, -1+j, 1-j,... -1-j, -1-j, -1-j, 1+j, 1+j, 1+j, 1+j, -1-j, -1+j, -1+j,... 1+j, -1-j, 1-j, 1-j, 1+j, -1-j, -1-j, -1-j, 1+j, -1-j,... -1+j, -1+j, -1+j, 1-j, 1-j, 1-j, 1-j, -1+j, 1+j, 1+j, ... -1-j, 1+j, -1+j, -1+j, -1-j, 1+j, 1+j, 1+j, -1-j, 1+j, ... 1-j, 1-j, 1-j, -1+j, -1+j, -1+j, -1+j, 1-j, -1-j, -1-j,... 1-j, -1+j, -1-j, -1-j, 1-j, -1+j, -1+j, -1+j, 1-j, -1+j,... 1+j, 1+j, 1+j, -1-j, -1-j, -1-j, -1-j, 1+j, 1-j, 1-j} 然則我們是採用偶數系列碼作為領航前導PEVEN
( )
k( )
( )
mod 2 mod 2 2 0 0 ALL EVEN P k k P k k ⎧ ⋅ =0 ⎪ = ⎨ ≠ ⎪⎩ (3.1) 其中 2 因子表示相對於傳送資料的功率提高了3dB。 在OFDM資料符元中,等間隔插入八個固定值 [-1 -1 1 1 -1 1 -1 1] 之 BPSK領航碼,也是相對於傳送資料的功率提高了 3dB。傳送資料是採四相移位鍵(QPSK)調變。 我們提出的三階通道估計與載波間干擾抑制之程序摘要如圖 3.3 並分 別詳述於下面三節。 2 time slot
nd 1 time slot
st time slot
Dth 0 time slot
th
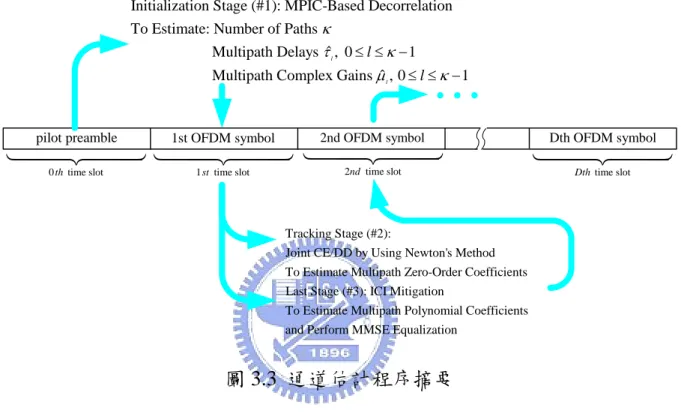
pilot preamble 1st OFDM symbol 2nd OFDM symbol Dth OFDM symbol
Initialization Stage (#1): MPIC-Based Decorrelation To Estimate: Number of Paths
ˆ
Multipath Delays , 0 1 ˆ
Multipath Complex Gains , 0 1
l l l l κ τ κ μ κ ≤ ≤ − ≤ ≤ − Tracking Stage (#2):
Joint CE/DD by Using Newton's Method To Estimate Multipath Zero-Order Coefficients Last Stage (#3): ICI Mitigation
To Estimate Multipath Polynomial Coefficients and Perform MMSE Equalization
i i i
圖 3.3 通道估計程序摘要
3.2 通道資訊之初始估計
在這一級中,我們使用如上圖3.3每個訊框(Frame)開始的第一個OFDM
領航前導(Pilot preamble)碼,做為通道脈衝響應(CIR)的初始估測。我們採用
多重路徑干擾消除(MPIC-based)去相關(Decorrelation)方法來估測多重路徑
延遲(Multipath delays)及多重路徑複數增益(Multipath complex gain)等資訊。
經估得的多路徑干擾來估測通道狀態資訊(CSI)。第一步是首先定義兩個參 數 和 ,分別表示在行動射頻通道的預設路徑數目和多重路 徑觀察窗。接下來,計算收到的領航前導碼 p N Is ⊆
[
0,K −1]
[ ]
P R k 與傳送的領航前導碼 間之循環互相關值(Cyclic cross-correlation)[ ]
P X k[ ]
{
[ ]
*[ ]
}
, 0, , 1 RX P P C τ ←IDFT R k ⋅X k τ = … K − (3.2) 及 的 正 規 化 (Normalized) 的 循 環 自 相 關 值 (Cyclic auto-correlation)[ ]
P X k[ ]
XX Cτ
[ ]
{
[ ]
*[ ]
}
, 0, , 1 XX P P C τ ← IDFT X k ⋅X k τ = … K − (3.3) 設定ρ
及κ
分別代表路徑計數及合法路徑數為我們要找的兩變數並初始化為 0。第二步首先在I 觀察區間內找出s CRP[ ]
τ
中的最大值及其所對應時間延遲 位置τ
ρ。假如τ
ρ大於 CP 的長度,此路徑則被視為無效路徑,捨棄之並設 ,如果小於CP的長度就保留此路徑為第 0 RX C ⎡ ⎤ =⎣ ⎦τρκ
條有效路徑其時間延 遲τ
ˆκ =τ
ρ及複數路徑增益為 ˆμκ =CRX ⎡ ⎤⎣ ⎦ 。然後重建此路徑之干擾值並從τρ[ ]
RX Cτ
中扣掉後獲得另一新的互相關函數[ ]
[ ]
ˆ[
ˆ ,]
RX RX XX Cτ
=Cτ
−μ
κCτ τ
− κτ
∈ (3.4) Is完成了這次程序找到有效路徑後,有效路徑數
κ
及路徑計數ρ
被遞增1 再重覆第二步驟找下一條路徑資訊直到ρ
到達 的預設值即停止路徑資訊 之估測。 p N 步驟一:預先假設路徑數目Np及多重路徑觀察區間Is 用下兩式計算求得CRX[ ]
τ
及CXX[ ]
τ
[ ]
{
[ ]
[ ]
}
[ ]
{
[ ]
[ ]
}
* * , 0, , 1 , 0, , 1 RX XX C IDFT R k X k N C IDFT X k X k Nτ
τ
τ
τ
= ⋅ = − = ⋅ = … … − 初始設定ρ及κ兩變數等於 0 步驟二:估測多重路徑延遲及多重路徑複數增益(以程式架構描述如下) whileρ
≤Np arg max{
[ ]
}
s RX C ρ τ τ τ ∈ = I ifτ
ρ > G CRX ⎡ ⎤ =⎣ ⎦τ
ρ 0 elsefind a legal path with time delay ˆ
τ
κ = and ˆτ
ρμ
κ =CRX ⎡ ⎤⎣ ⎦τ
ρCRX
[ ]
τ
←CRX[ ]
τ
−μ
ˆκCXX ⎣⎡τ τ
− ˆκ ⎦⎤, \τ
∈Is{
τ
i :i=0,…,ρ
−1}
κ
← +κ
1 Endρ
← +ρ
1 end 圖 3.4 基於去相關之多重路徑干擾消除方法3.3 通道變化精確的追蹤方法
在 前 一 節 中 描 述 了 利 用 每 一 訊 框(Frame)最 前 頭 的 OFDM 前 導
(Preamble)符 元 , 藉 由 MPIC-based Decorrelation 方 法 估 得 了 路 徑 數
(
Np)
κ ≤ 、多重路徑延遲 ˆτl及複數增益 ˆμl,其l∈{
0,…,κ
−1}
,等重要路徑參 數資訊,給接在其後的OFDM 資料符元做為追蹤各個符元期間通道變化的 估測依據。不失一般性,我們假設多重路徑延遲 ˆτl在每一傳送訊框時間內不 會改變。且在這一級中之通道估測,我們預先假定在一個OFDM符元期間 通道是幾乎靜止的(Quasi-static),也就是考慮通道模型其多重路徑複數增益 不變,目的在於估得各路徑之平均複數增益。因此,對於通道頻率響應H k[ ]
的參數估計M k[ ]
能以 個複數弦波總和來形成κ
[ ]
1{
}
0 1 0 1 0 ˆ exp 2 / ˆ 2 2 cos sin ˆ ˆ 2 2 cos sin l l l l l l l l l l l l M k j k N k k N N k k j N N κ κ κμ
π τ
π τ
π τ
α
β
ˆlπ τ
π
β
α
− = − = − = = − ⎛ ⎛ ⎞ ⎛ ⎞⎞ = ⎜ ⎜ ⎟+ ⎜ ⎟⎟ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎛ ⎛ ⎞ ⎛ ⎞⎞ + ⎜ ⎜ ⎟− ⎜ ⎟⎟ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠∑
∑
∑
τ
l (3.5) 其中μ αl = l + jβ 是第l個路徑複數增益,l∈{
0,…,κ
−1}
。 根據(2.6)、(3.5)式,結合通道估計與資料偵測問題以最大可能性估測架 構使之公式化為下式:[ ]
[ ] [ ]
2 , ˆ ˆ, arg min k R k M k X k ∈Θ =∑
− X M X M (3.6) 其中{
}
1 0, , − = Θ Θ Θ Θ … 是Q的子集合,依實際需要可考慮選擇在部份次載波 索引位置上之資料執行總和。由於(3.6)式中含有兩組未知數M k[ ]
及X k[ ]
, 故為簡化最佳化問題重寫公式如下:[ ]
[ ] [ ]
2ˆ ˆ, arg min min
k R k M k X k ∈Θ =
∑
− M X X M (3.7) 我們採用最小平方解(LS solution)先對X最小值求解,因此得到如下公式:[ ]
[ ]
(
[ ]
)
2ˆ ˆ, arg min min
k R k M k
χ
k ∈Θ =∑
− M X X M Φ (3.8) 其中χ
[ ] [ ] [ ]
k =R k M k ,這裡的M k[ ]
也代表著前一次(指前一時槽或前一 Iteration)估測所估得的通道頻率響應。Φ( )
i 表示一般的二元偵測(Binary detection),亦即對於實數資料η
,( )
1 0 1 0η
η
η
+ > ⎧ = ⎨− < ⎩ Φ (3.9) 對於複數資料,實部與虛部可分開做偵測。最後把(3.8)分成實部與虛部並 寫成新的成本函數型式如下:( )
ˆ =arg min f y y y (3.10) 其中( )
2( )
2( )
, , I k Q k k fψ
ψ
∈ ⎡ =∑
⎣ + Θ y y y ⎤⎦ (3.11) 0 1 0 , , , , , , , I Q Iα
α
κ− Qβ
β
κ−1 = = = y y y y … y … (3.12)( )
[ ]
[ ]
(
[ ]
)
[ ]
(
[
]
)
, I I I Q Q I k R k M k k M k kψ
y = − Φχ
+ Φχ
(3.13)( )
[ ]
[ ]
(
[ ]
)
[ ]
(
[
]
)
, Q Q I I Q Q k R k M k k M k kψ
y = − Φχ
− Φχ
(3.14) 現 在 我 們 使 用 牛 頓 方 法[8]找(3.10)式 成 本 函 數 的 最 小 值 , 其 反 覆 (Iterative)公式為 ( )i,ν = (i,ν−1) − ( )i, y y g ν (3.15) 其中ν
是反覆次數指標、且1≤ ≤ν
V ,y( )i,ν 是在第ν
次反覆所估得的通道狀態資訊(Channel state information, CSI), ( )i, 1
(
(i, 1))
(
( ))
f ν = − ν − ∇ g F y yi,ν −1 是搜尋 方向向量,F y
(
(i,ν −1))
及∇ yf(
(i,ν −1))
分別代表 f( )
y 在y y= (i,ν −1)的Hessian 矩陣 及Gradient梯度向量。以下就分別求出F y 及( )
∇f( )
y 各項:梯度向量∇f
( )
y 的第 j項能被如下求得( )
(
)
( )
( )
,( )
( )
,( )
, , 2 I k I k Q k Q k j k j j f f y yψ
ψ
ψ
ψ
∈ ⎛ ∂ ∂ ⎞ ∂ ∇ = = ⎜⎜ + ⎟⎟ ∂∑
Θ⎝ ∂ ⎠ y y y y y y j y ∂ (3.16) 其 中 偏 導 數∂ψ
I k,( )
y ∂yj 、∂ψ
Q k,( )
y ∂yj 能 以 下 列 方 法 推 導 。 首 先 假定[ ]
k 0χ
= 的機率是0,因此定義此項牽涉到函數Φ( )
i 的偏導數為0。因為在y 中的第 j個變數yj是αl或βl,於是對(3.11)式偏微分得到如下結果,( )
(
[ ]
)
(
[ ]
, 2 ˆ 2 ˆ cos sin I k l I l Q l k k k k N N)
ψ
π τ
χ
π τ
χ
α
∂ ⎛ ⎞ ⎛ ⎞ = − ⎜ ⎟ − ⎜ ⎟ ∂ ⎝ ⎠ ⎝ ⎠ y Φ Φ (3.17)( )
(
[ ]
)
(
[ ]
, 2 ˆ 2 ˆ sin cos I k l I l Q l k k k k N N)
ψ
π τ
χ
π τ
χ
β
∂ ⎛ ⎞ ⎛ ⎞ = − ⎜ ⎟ + ⎜ ⎟ ∂ ⎝ ⎠ ⎝ ⎠ y Φ Φ (3.18)( )
(
[ ]
)
(
[ ]
, 2 ˆ 2 ˆ cos sin Q k l Q l I l k k k k N Nψ
π τ
π τ
χ
χ
α
∂ ⎛ ⎞ ⎛ ⎞ = − ⎜ ⎟ + ⎜ ⎟ ∂ ⎝ ⎠ ⎝ ⎠ y Φ Φ)
(3.19)( )
(
[ ]
)
(
[ ]
, 2 ˆ 2 ˆ sin cos Q k l Q l I l k k k k N Nψ
π τ
π τ
χ
χ
β
∂ ⎛ ⎞ ⎛ ⎞ = − ⎜ ⎟ − ⎜ ⎟ ∂ ⎝ ⎠ ⎝ ⎠ y Φ Φ)
(3.20) 接下來,我們計算F y 的第( )
( )
i j, 項( )
(
)
( )
( )
( )
( )
( )
( )
( )
( )
( )
2 2 , , , , , 2 , , , , 2 I k I k I k I k i j k i j i j i j Q k Q k Q k Q k i j i f y y y y y y y y y yψ
ψ
ψ
ψ
ψ
ψ
ψ
ψ
∈ ⎛ ∂ ∂ ∂ ∂ = = ⎜⎜ + ∂ ∂ ⎝ ∂ ∂ ∂ ∂ j ⎞ ∂ ∂ ∂ + + ⎟⎟ ∂ ∂ ∂ ∂ ⎠∑
Θ y y y F y y y y y y y (3.21) 其中包涵ψ
I k,( )
y 及ψQ k,( )
y 的二次導數,通常非常小是可以被忽略的,因此得到下面近似公式
( )
(
)
,( )
,( )
,( )
,( )
, 2 Q k Q k I k I k i j k yi yj yi yjψ
ψ
ψ
ψ
∈ ⎛∂ ∂ ∂ ∂ ⎞ ≈ ⎜⎜ + ⎟⎟ ∂ ∂ ∂ ∂ ⎝ ⎠∑
Θ y y y y F y (3.22) 最後,使用(3.17)~(3.20)式的結果,我們整理得到( )
(
)
( ) ( ) ( )( )(
)
(
)
(
)
( ) ( ) ( )( )(
)
(
)
( ) ( ) ( )( )(
)
(
)
, ˆ ˆ 4 cos 2 , for , 1 1, where 0 or 1 ˆ ˆ 4 sin 2 ,0 1, 2 ˆ ˆ 4 sin 2 , 2 1,0 1 i j k i j i j k i j k k N i j k N i j k N i j κ κ κ κ κ κπ τ
τ
ςκ
ς
κ
ς
π τ
τ
κ
κ
κ
π τ
τ
κ
κ
κ
∈ ∈ ∈ ⎧ − ⎪ ⎪ ≤ ≤ + − = ⎪ ⎪ ≈ ⎨− − ≤ ≤ − ≤ ⎪ ⎪ ⎪ 1 ≤ − − ≤ ≤ − ≤ ≤ − ⎪⎩∑
∑
∑
Θ Θ Θ F y (3.23) 由(3.23)式知,矩陣F y 只和多重路徑延遲( )
τˆl有關,於是它能被簡化成 一常數矩陣 F。經過上述推導後,我們可以利用(3.15)、(3.16)、(3.23)式反 覆(Iterative)執行數次去估計得到每一個OFDM時槽的多重路徑平均複數增 益值。 從最佳化理論得知,由於牛頓法的局部搜尋能力,只能應用於慢地時變通道(Slowly time-varying channels)。在先前的論文研究[10][11],在快速
地時變通道(Fast time-varying channels),同時採用領航信號(Pilot tone)以及
決策後的資料符元(Decision data symbols)在每次反覆中執行通道估測並不
propagation effect),而領航信號是比決策後的資料符元遠較可靠的。從最佳 化的觀點,插在每個OFDM資料符元中的領航碼,在提供牛頓方法第一次 反覆的總體搜尋方向扮演了一個重要角色,亦即利用這些領航碼產生一個 梯度向量,可以幫助更密切地追蹤通道變化。於是我們提出一個精巧的通 道追蹤方法只要修改第一次反覆即可。 在第i個時槽使用數個領航碼,按照最小平方 (Least-Square, LS) 解去 估出通道頻率響應H k ,
[ ]
k∈J[ ]
[ ] [ ]
H k = R k X k . (3.24) 再利用(3.5)式定義一個ML 度量(Metric)函數 f y( )
( )
(
)
[ ]
[ ]
0 1 0 1 2 1 0 2 1 0 , , , , ˆ ˆ 2 2 cos sin ˆ ˆ 2 2 cos sin I l l l l k J l Q l l l l l f f k k H k N N k k H k N N κ κ κ κα
α
β
β
π τ
π τ
α
β
π τ
π τ
β
α
− − − ∈ = − = = ⎛⎛ ⎛ ⎛ ⎞ ⎛ ⎞⎞ ⎞ ⎜ = ⎜ ⎜ ⎜ ⎟+ ⎜ ⎟⎟− ⎟ ⎜⎝ ⎝ ⎝ ⎠ ⎝ ⎠⎠ ⎠ ⎝ ⎞ ⎛ ⎛ ⎛ ⎞ ⎛ ⎞⎞ ⎞ ⎟ +⎜ ⎜ ⎜ ⎟− ⎜ ⎟⎟− ⎟ ⎟ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎠∑ ∑
∑
y … … (3.25) 於是函數 f y( )
在y(i−1,V) 的偏導數被求得如下: 0 1 0 0 1 1 0 1 ˆ 2 ˆ 2 ˆ 2 ˆ 2 2 j J j J N N j J j J N N e e e e κ κ π τ π τ π τ π τ − − − − ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ = ⋅ ⎢ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ J J ζ ⎥⋅Γ (3.26)該
( )
( )
( )
( )
( 1, ) 1 1 , , i V f f f f j j κ κα
β
α
β
− − − = ⎛∂ ∂ ⎞ ⎛∂ ∂ = ⎜ ∂ + ∂ ⎟ ⎜ ∂ + ∂ ⎝ 0 0⎠ ⎝ y y y y y y ζ ⎞⎟ ⎠ … 且 ( )i−1 = − Γ M H ,其中H= H k[ ]
:k∈J ,M( )i−1 = M( )i−1[ ]
k :k∈J ,亦即在第(
i−1)
個時槽最後一次反覆估得的通道狀態資訊(CSI)。因此能夠從(3.26)式 獲得初始搜尋方向向量Ψ= ζ ζI, Q 。於是(3.14)式之搜尋方向向量在執行第 個OFDM時槽第一次反覆時應被修改為 i ( )i,1 = β ( ) g Ψi (3.27) 其中β
為實數值步級大小因子,是利用領航碼建立的 ML 成本函數使之最 小來求得,在頻率域推導如下: 重寫(3.15)式為複數型式,即 ( )i,1 = (i−1,V) − ( )i,1 = (i−1,V) −β ( ) y y g y Ψ i (3.28) 上式中y y= I + jy ,是把 y 中同路徑實部虛部合併的結果。接著利用已估得Q 的多重路徑延遲 ˆτl執行截去離散傅立葉轉換(Truncated DFT)至頻率域可表 示為 ( )i,1 = (i−1,V) −β
( ) Fy Fy FΨ i (3.29) 其中F代表截去離散傅立葉轉換(Truncated DFT)矩陣如下0 0 0 1 0 1 1 1 ˆ ˆ 2 2 ˆ ˆ 2 2 j J j J N N j J j J N N e e e e κ κ π τ π τ π τ π τ − − − − − − − − ⎡ ⎤ ⎢ ⎥ ⎢ = ⎢ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ J J F ⎥⎥ (3.30) ( )i,1 Fy 是第一次反覆估計得到的通道狀態資訊,以M1表示。Fy(i−1,V) 是前一 個時槽最後一次反覆估計得到的通道狀態資訊,以M0表示。Ψ 是時域的( )i 梯度更新向量,並且令Π FΨ ,於是= ( )i (3.28)變成M1 =M0 −βΠ,對於在每 個領航碼之次載波索引位置,其頻率響應更新(Update)公式可以寫成下式
[ ]
[ ]
[ ]
1 0 , M k =M k − Πβ
k k∈J . (3.31) 接著建立一個以β
為變數的成本函數L( )
β
,並以最佳化找到最小的β
值:( )
[ ]
[ ] [ ]
2 1 arg min arg min k L R k M k X k β ββ
β
∈ = =∑
− J (3.32) 代入(3.31)式至(3.32)式,可以得到下式[ ]
(
[ ]
[ ]
)
[ ]
[ ]
[ ] [ ]
[ ] [ ]
2 0 2 0 arg min arg min k k R k M k k X k R k M k X k k X k β ββ
β
β
∈ ∈ = − − Π = − + Π∑
∑
J J (3.33)令
γ
[ ] [ ]
k =R k −M k X k0[ ] [ ]
,和φ
[ ]
k = Π[ ] [ ]
k X k[ ]
[ ]
[ ]
[ ]
(
[ ]
[ ]
)
[ ]
[ ]
(
)
(
[ ]
[ ]
)
2 2 2 2 arg min arg min arg min k I Q I Q k I I Q Q k k k k j k k j k k k k k β β ββ
γ
βφ
γ
γ
β φ
φ
γ
βφ
γ
βφ
∈ ∈ ∈ = + = + + + ⎡ ⎤ = ⎢ + + + ⎥ ⎣ ⎦∑
∑
∑
J J J (3.34) 成本函數即為( )
(
[ ]
[ ]
)
2(
[ ]
[ ]
)
2 I I Q Q k Lβ
γ
kβφ
kγ
kβφ
∈ ⎡ ⎤ = ⎢ + + + ⎥ ⎣ ⎦∑
J k (3.35) 對L( )
β
微分,且令∂L( )
β
∂ =β
0,可以得到下式( )
(
[ ]
[ ]
)
[ ]
(
[ ]
[ ]
)
[ ]
2 I I I Q Q Q 0 k f k k k k k kβ
γ
βφ
φ
γ
βφ
φ
β
∈ ∂ ⎡ ⎤ = ⎣ + + + ⎦ ∂∑
J = (3.36) 於是推導得到最佳β
值如下[ ] [ ]
[ ] [ ]
(
)
[ ]
[ ]
(
2 2)
I I Q Q k I Q k k k k k k kγ
φ
γ
φ
β
φ
φ
∈ ∈ + = − +∑
∑
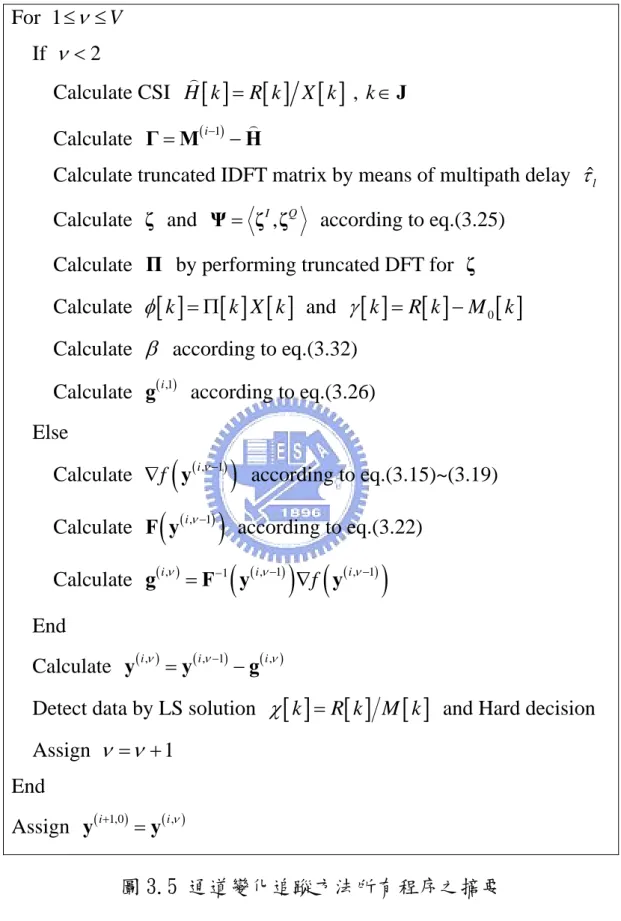
J J (3.37) 經過上述推導後,我們摘要在這一節中通道變化追蹤方法之所有程序 如下圖:For 1≤ ≤
ν
VIf
ν
< 2Calculate CSI H k
[ ]
= R k[ ] [ ]
X k , k∈ JCalculate Γ M= ( )i−1 −H
Calculate truncated IDFT matrix by means of multipath delay τ ˆl
Calculate ζ and Ψ= ζ ζI, Q according to eq.(3.25)
Calculate Π by performing truncated DFT for ζ
Calculate
φ
[ ]
k = Π[ ] [ ]
k X k andγ
[ ]
k =R k[ ]
−M0[
k]
Calculate
β
according to eq.(3.32)Calculate g( )i,1 according to eq.(3.26)
Else
Calculate ∇f
(
y(i,ν −1))
according to eq.(3.15)~(3.19)Calculate F y
(
(i,ν −1))
according to eq.(3.22)Calculate g( )i,ν =F−1
(
y(i,ν −1))
∇f(
y(i,ν−1))
End
Calculate y( )i,ν =y(i,ν−1)−g( )i,ν
Detect data by LS solution
χ
[ ]
k =R k[ ] [ ]
M k and Hard decisionAssign
ν ν
= + 1End
Assign y(i+1,0) =y( )i,ν
3.4 載波間干擾減緩之方法
在移動多路徑衰減通道,每一個 OFDM 符元期間的通道變化是時變 的;在慢地時變通道可用線性非時變或一階多項式做為通道模型,然而在 高速移動時,通道變化已不再是線性變化。於是我們提出了一個方法是以 二階多項式去逼近(approximate)每一延遲路徑之通道變化。基本上,在這一 級中通道估測之推導方法與前一級中之通道追蹤方法相類似,皆是為結合 通道估計與資料偵測問題使公式化成最大可能性估計架構,再以牛頓方法 經反覆(Iterative)求解更新至最佳的通道參數,接著我們詳細推導如下。 對應一個通道延遲τˆl之路徑增益參數,我們提出的模型如下式。 ( ) ( ) ( ) ( ) ( ) 2 ,0 ,1 ,2 2 ,0 ,1 ,2 i i i l l l i l l l l i l l l l h j i i iα
β
α
α
α
α
β
β
β
β
= + = + + = + + i (3.38) 其中 ( )i l h 為第 瞬間第i l路徑的複數通道增益,α
l( )i 、 ( )i lβ
表示為實部與虛部之 路徑增益,分別以二次多項式表示在一個OFDM 符元期間通道增益時變之 近似。於是集合此二次多項式係數寫成為一行向量如下 0,0 1,0 0,1 1,1 0,2 1,2 0,0 1,0 0,1 1,1 0,2 1,2 , , , , , , , , , , , , , , , , , L L L Lα
α
α
α
α
α
β
β
β
β
β
β
− − − − = = z α β L , L − − (3.39),並且把通道頻率響應Hk d, 藉由(2.9)、(2.10)式寫成這些係數的函數 ( )
(
( ) ( ))
(
) (
)
(
)
(
)
(
)
2 2 1 1 0 0 2 1 2 2 ,0 ,1 ,2 ,0 ,1 ,2 0 2 2 1 1 2 ,0 ,0 ,1 ,1 ,2 ,2 0 0 ( ) di di N j N j i N i i N l l l l i i di N j N l l l l l l i di di di N j N j N N l l l l l l i i F d h e j e i i j i i e j e j ie j i e π π π π πα
β
α
α
α
β
β
β
α
β
α
β
α
β
− − − − = = − − = − − − − = = = = + ⎡ ⎤ = ⎣ + + + + + ⎦ = + + + + +∑
∑
∑
∑
∑
1∑
2 0 N j N i π − − = (3.40) (3.40)式中三個和(Summation)分別被定義為( )
1 2 0 0 0 0 j di N N i N d A d e d π − − = = ⎧ = = ⎨ ≠ ⎩∑
(3.41)( )
1 2( )
( )
0 j di N N I Q i B d ie b d jb π − − = =∑
= + d (3.42)( )
1 2( )
( )
2 0 j di N N I Q i C d i e c d jc d π − − = =∑
= + (3.43) 其中N是次載波數目為已知,則以上三式皆為確定值。於是整理如下( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
,0 ,1 ,1 ,2 ,2 ,0 ,1 ,1 ,2 ,2 l l I l Q l I l Q l l Q l I l Q l I l F d A d b d b d c d c d j A d b d b d c d c dα
α
β
α
β
β
α
β
α
⎡ ⎤ =⎣ + − + − ⎦ ⎡ ⎤ ⋅⎣ + + + +β
⎦ + (3.44) 然後利用上述F dl( )
推導結果代入(2.10)式求得 與這些係數的函數關係 如下 , k d H( )
( )( )
( )( )
( )
( )
( )
( )
{
( )
( )
( )
( )
( )
}
ˆ 2 2 1 1 , 0 0 1 ,0 ,1 ,1 ,2 ,2 0 ˆ 2 ,0 ,1 ,1 ,2 ,2 1 1 ˆ 0 1, 0 , 1 l l n k d k d G j j N N k d n l l n l l I l Q l I l Q l l j l Q l I l Q l I l H F d e F d e G k d N N N A d b d b d c d c d N j A d b d b d c d c d e π κ πτ κ πττ
α
α
β
α
β
β
α
β
α
β
− − − − − − = = − = − = = ≤ ≤ − ≤ ⎡ ⎤ = ⎣ + − + − ⎦+ ⎡ ⎤ ⋅⎣ + + + + ⎦∑
∑
∑
1 ≤ − ( )( )
( )
( )
( )
( )
{
( )
( )
( )
( )
( )
( )
( )
}
( )
( )
( )
( )
( )
{
( )
1 ,0 ,1 ,1 ,2 ,2 0 ,0 ,1 ,1 ,2 ,2 1 ,0 ,1 ,1 ,2 ,2 0 1 cos sin cos k d N l I l Q l I l Q l l l Q l I l Q l I l l Q l I l Q l I l l A d b d b d c d c d N A d b d b d c d c d j A d b d b d c d c d N κ κα
α
β
α
β
β
α
β
α
β
β
α
β
α
β
− − = − = ⎡ ⎤ = ⎣ + − + − ⎦ ⎡ ⎤ +⎣ + + + + ⎦ ⎡ ⎤ + ⎣ + + + + ⎦∑
∑
i i i( )
( )
( )
( )
( )
( )
}
(
)
(
)
,0 ,1 ,1 ,2 ,2 sin , , (3.45) l I l Q l I l Q l I Q A d b d b d c d c d M k d j M k dα
α
β
α
β
⎡ ⎤ −⎣ + − + − ⎦ = + ⋅ i 其中( )
2 ˆl(
k d)
Nπτ
− ⎛ ⎞ = ⎜ ⎟ ⎝ ⎠ i 。 如同於 3.3 節通道估計追蹤推導方式,我們再次結合通道估計與資料偵 測問題以最大可能性估測架構使之公式化寫成如下公式: ( ) ( ) 2 1 , 0 2 ˆ ˆ ˆ , arg min ˆ arg min N N k k d k d k d R H X − − ∈ = = − = −∑
∑
α,β Θ eq α,β α β R H X (3.46) 接下來我們使用牛頓方法找最佳通道估計係數,亦即是等效通道頻率響應 Heq,其中 已為前級(即 3.3 節所述之方法)先估得,而 Heq為α、β之函數。 於是(3.46)式改寫成一個新的成本函數型式 ˆ X( )
ˆ =arg min f z z z (3.47)( )
(( ))(
)
(
)
(( )) (( ))(
)
(( ))(
)
(( ))(
)
(( )) 2 1 0,0 1,2 , 0 2 1 0 1 0 ˆ ( , , ) ˆ ˆ , , ˆ ˆ , , ˆ , N N N N N N N L k k d k d k d N I Q I Q k k I Q k d k d k d N I Q I Q k k I k d Q k d k d I k d f f R H X R jR M k d jM k d X jX R jR M k d X M k d X j M k d Xα
β
− − − ∈ = − − − ∈ = − − − ∈ = − = = − ⎡ ⎤ ⎡ ⎤ = + − ⎣ + ⎦ ⎣ + ⎦ ⎡ ⎤ = + − ⎣ − ⎦ − ⋅∑
∑
∑
∑
∑
∑
Θ Θ Θ z(
)
(( ))(
)
(( ))(
)
(( )){
}
(
)
(( ))(
)
(( )){
}
( )
( )
{
}
2 1 0 1 0 2 1 0 2 2 ˆ , ˆ ˆ , , ˆ ˆ , , N N N N N N Q I Q k d d N I I Q k I k d Q k d k d N Q Q I k I k d Q k d d k k k M k d X R M k d X M k d X j R M k d X M k d X r s − − = − − − ∈ = − − − = ∈ ⎡ + ⎤ ⎣ ⎦ ⎡ ⎤ = − ⎣ − ⎦ ⎡ ⎤ + ⋅ − ⎣ + ⎦ = +∑
∑
∑
∑
∑
Θ Θ z z (3.48) 其中( )
(
)
(( ))(
)
(( ))( )
(
)
(( ))(
)
(( )) 1 1 0 0 1 1 0 0 ˆ ˆ , , ˆ ˆ , , N N N N N N I I k k I k d Q k d d d N N Q Q k k I k d Q k d d d r R M k d X M k d X s R M k d X M k d X − − − − = = − − − − = = = − + = − −∑
∑
∑
∑
z z Q I (3.49) 牛頓方法之反覆(Iteration)公式已為(3.15)式所描述,再次摘要如下: ( ) ( 1) 1( )
( 1)( )
( ) f ν = ν− − − ν− ⋅∇ ν z z F z z −1 (3.50) 其中ν
是反覆次數指標(
ν
=1, ,V)
;F z( )
(ν −1) 及( )
( 1) f ν − ∇ z 分別代表函數 f z( )
在z(ν−1)的 Hessian 矩陣和梯度相量(Gradient vector)。則( )
( 1)f ν −
∇ z 的第 j 項能 被如下求得: