行政院國家科學委員會專題研究計畫 成果報告
智慧型語音控制機器人之研製
研究成果報告(精簡版)
計 畫 類 別 : 個別型 計 畫 編 號 : NSC 99-2221-E-151-060- 執 行 期 間 : 99 年 08 月 01 日至 100 年 07 月 31 日 執 行 單 位 : 國立高雄應用科技大學電子工程系 計 畫 主 持 人 : 潘天賜 計畫參與人員: 碩士班研究生-兼任助理人員:林智盛 報 告 附 件 : 出席國際會議研究心得報告及發表論文 處 理 方 式 : 本計畫涉及專利或其他智慧財產權,2 年後可公開查詢中 華 民 國 100 年 09 月 08 日
行政院國家科學委員會補助專題研究計畫
成果報告
□期中進度報告
智慧型語音控制機器人之研製
Design and Implementation of an Intelligent Voice Controlled Robot
計畫類別:
個別型計畫 □整合型計畫
計畫編號:NSC 99-2221-E-151-060
執行期間: 2010 年 8 月 1 日至 2011 年 7 月 31 日
執行機構及系所:
國立高雄應用科技大學電子工程系
計畫主持人:
潘天賜
共同主持人:
計畫參與人員:
成果報告類型(依經費核定清單規定繳交):精簡報告 □完整報告
本計畫除繳交成果報告外,另須繳交以下出國心得報告:
□赴國外出差或研習心得報告
□赴大陸地區出差或研習心得報告
出席國際學術會議心得報告
□國際合作研究計畫國外研究報告
處理方式:
除列管計畫及下列情形者外,得立即公開查詢
涉及專利或其他智慧財產權,□一年
二年後可公開查詢
中 華 民 國 99 年 8 月 20 日
附件一行政院國家科學委員會補助專題研究計畫
成果報告
□期中進度報告
智慧型語音控制機器人之研製
Design and Implementation of an Intelligent Voice Controlled Robot
前言 截至目前為止,產業用機器人仍是市場上的主流,個人家用機器人產業,目前正值萌芽階段,只 有少數家用機器人產品如清潔吸塵器機器人與智慧型互動玩具,已進入成長期;在此階段中,產業競 爭的因素在於服務內容、技術能力、以及價格等因素,隨著 21 世紀社會結構已逐漸轉變為高齡化、少 子化、孤立化的社會型態,智慧型機器人的重要性就逐漸受到重視,其運用層面已朝向多元化的方向 發展,不論是醫療照護、娛樂、教育…等皆有智慧型機器人的身影,人們對於機器人的刻板印像將會 逐漸改變,從工廠毫無生命的機械手臂,轉換為家庭中的寵物機器人,擔任與家庭成員互動的角色, 將來機器人將會是每個家庭不可少的夥伴。 國外目前與寵物機器人相關的產品有 SONY 新力公司於 1999 年首次推出的電子機器寵物 AIBO[1], AIBO 是第一款成功商品化的高階寵物狗,銷售累積近 14 萬台,AIBO 除了擁有高度的人工智慧外,也 具有自我學習及成長本能,但其價格不菲,並無法打入一般家庭中;2003 年由日本產業技術研究所研 製出新型機器人 PARO[2],這是一款具有高度智慧的海豹機器人,其最大的特點是會對人的接觸產生 交互反應,目前已參與過多間養老院及醫院的醫學治療,研究證實,該機器人對於孩童及老年人有安 撫情緒和緩解憂鬱症的效果;2005 年麻省理工學院媒體實驗室發表其所研製的 Huggable robotic teddy bear[3]機器人,該機器人可利用網路介面進行遠端控制,機器人內部擁有超過 1500 感測器, 皮膚採用特殊材質使整體更為逼真,且具有觸摸互動的設計,讓機器人與使用者有互動與情感聯繫, 但目前無止,並無公開上市計畫;2006 年由 Ugobe 公司設計的電子恐龍 Pleo[4]再全球上市,售價為 199 美元,雖然不便宜,但仍比當年的 AIBO 便宜許多,Pelo 設計理念在於強調他是具有個性、可與人 互動之生命形式機器人,其有近 40 個感測器,對於周遭的聲音、動作都會產生互動反應,並透過與主 人、環境的互動進行學習與成長;2009 年由 Fujitsu 研製的 robot teddy bear[5],泰迪熊身上有 12 個活動關節,可做點頭搖頭及眨眼等動作,其設計重點在身體接觸和互動與非語言交流,泰迪熊可經 由 CCD 感測器辨識人臉,並加以追蹤位置。 國內目前在智慧型寵物機器人尚未有完整的研究發表出來,以台灣目前在資通訊硬體設計製造上 的領先地位優勢,若能結合產、學、研各界能量投入個人與家用機器人的領域之研發,定能再創台灣 的另一個產業的新契機。 機械結構
的機械結構,以及控制系統與佈線所需要的空間,確保彼此沒有干涉的問題,階段設計完成後將使用 RP(Rapid Prototyping)快速成型技術做出實體模型(圖 2),之後就可以用實體模型加以組裝及測試。 圖 1.3D 立體建模設計圖 圖 2.實體組裝完成圖 眼皮機械結構是由一個伺服馬達,搭配連桿與轉盤,將伺服馬達的旋轉運動轉為搖擺運動,藉由 伺服馬達精確的角度控制特性,眼皮的控制就更為精密及容易,其開合角度可達 80 度,反應時間為 0.1 秒。眼皮之機械結構如圖 3。 圖 3.眼皮機械結構 嘴巴之機械結構較為簡單,因其沒有太大的負載,所以並不需要用到扭力很高的伺服馬達,若使 用小型的伺服馬達,便可已直接加裝在嘴巴上面做直接帶動,此種結構效率最高,角度的控制也最精 準,結構也相對簡單很多。寵物機器人嘴巴開合動作設計最高可達 80 度,實際應用上約為 40 度左右。
嘴巴之結構如圖 4。 圖 4.嘴巴之機械結構 頸部之機械結構分為兩部份,一個自由度為上下,一個自由度為左右,用來模擬真實寵物的點頭 及搖頭動作,因寵物機器人頭部擁有相當多的元件,具有一定的重量,伺服馬達要控制頭部轉動,就 必須要有相當大的扭力,因此這部份特別挑選扭力較強的標準尺寸伺服馬達,此馬達扭力可達 10kg-cm,反應時間接在 0.2 秒以內,再經過實際測試後並無發現問題,左右轉動也採用相同的伺服馬 達。 為使寵物機器人可左右轉動頭部,設計將頭部與頸部分開,在頸部中裝設伺服馬達,並將頭部建 立在一個轉盤上,頸部伺服馬達只要控制轉盤運動(圖 5),寵物機器人的頭部就會跟著轉動,在轉盤 與頸部的縫隙中,設計了六顆的鋼珠,用來減輕頸部內伺服馬達的負擔(圖 5),控制寵物機器人上下 的伺服馬達,裝設在頭部內,旋轉軸直接跟支撐架做固定,如此一來便可帶動頭部做上下運動(圖 6), 其運動角度為上下 15 度左右,左右可達 90 度。 圖 5.頭部左右之機械結構
圖 6.頭部上下之機械結構 電路系統
本論文所設計之電路系統方塊圖如圖 7。
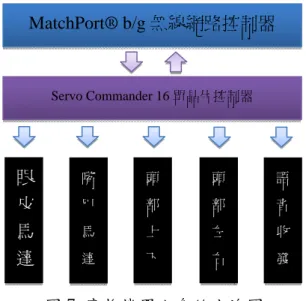
圖 7.寵物機器人系統方塊圖
本系統採用兩種控制器,分別為 Lantronix 公司的 MatchPort® b/g(圖 8)及 Innovati 公司的 Servo Commander 16(圖 9),MatchPort® b/g 用來負責與架設 Java 網頁控制系統,負責將控制指令傳給 Servo Commander 16,並接收回傳狀態之資料,顯示再網頁中,Servo Commander 16 用來控制所有的伺服馬 達及接收感測器資料,其內部具有可程式化的單晶片控制器,寵物機器人所有的表情動作皆已記憶在 其中,只要接收到指令後,即可執行情緒表情動作。 圖 8. MatchPort® b/g 控制器 MatchPort® b/g 無線網路控制器 Servo Commander 16 單晶片控制器 眼 皮 馬 達 嘴 巴 馬 達 頭 部 上 下 頭 部 左 右 語 音 收 發
圖 9. Servo Commander 16 控制器 MatchPort® b/g 為插板式元件,無法直接使用,為此又另外設計了一塊專用電路板,上面有 穩壓電路,將外部電源穩壓成 3.3V 送給控制器使用,以及將訊號腳引出成端子座,如圖 10。 (a) (b) 圖 10.(a)電路圖(b)佈線圖
本系統使用 2 顆電池做為電力來源,一個為鋰聚電池 7.4v,供應給 MathPort 及 Servor command 控制器,其中 MatchPort 有先經過穩壓器成 3.3V,另外一組電池為 4cell 的鎳氫電池,電壓為 4.8v, 專門供應給伺服馬達用,沒有經過穩壓,因本系統使用多顆伺服馬達,耗電量大,因此將控制系統與 伺服馬達分開供電,如此一來,可使整體系統更為穩定。
圖 11.寵物機器人系統架構圖 無線網路架構 現今的網路技術越來越發達,其應用亦趨豐富多樣化,連帶著相關的網路連線技術也不斷的提昇, 網路從有線方式的電話撥接、寬頻電視、ADSL 到無線方式的藍芽、WiFi、3G、WiMax…等等。 無線網路架構為目前我們所使用最廣泛的一項技術,即大家所熟知的 WiFi(Wirelessfidelity), 常見的 WiFi 標準有 802.11a、802.11b 及 802.11g,其傳輸速率除 802.11b 為 11Mbps,另外兩者 皆為 54Mbps,而 WiFi 的特性為範圍較短(約數十公尺)以及低移動性(適合定點接收)。目前有許多地 方都已提供免費或付費的 WiFi 無線上網服務,如學校、車站、咖啡店、飯店等,為普及率最高的無 線網路服務。除了使用其他已架設好的 WiFi 服務之外,也可以自己在家中架設無線網路。 本論文所使用的無線網路架構即為 WiFi,硬體部份支援 802.11g,可提供 54Mbps 之頻寬,未來若 要加入影像擷取模組,也可以提供足夠的頻寬,本系統所架設之 Java 網頁控制系統,是直接設置再寵 物機器人上面,無須再透過另一台電腦當伺服控制器,硬體成本也可大為降低。 軟體介面 本論文設計一圖形化控制介面,使用者可透過任何電腦,經由網路連線到寵物機器人,使用者使 用前需先建置 Java 執行環境,連線成功後,瀏覽器會自動將 Java 網頁程式下載到使用者電腦中來執 行,使用 Java 網頁程式的好處是可跨平台,甚至目前相當流行的智慧型手機也可執行,透過瀏覽器執 行 Java 網頁程式不僅可以控制寵物機器人動作,也可已看到寵物機器人傳回的感測器資料及寵物機器 人狀態,達到遠端控制的目的。
軟體介面使用 Myeclipse 軟體撰寫 Java 網頁程式,再使用 tftp 指令上傳到 MatchPort® b/g 中。 使用者一執行 Java 網頁控制程式後,Java 程式就會開始嘗試與寵物機器人建立連線,當連線建立成 功後,變進入等待指令狀態,機器人狀態顯示 Ready,此時使用者可點選畫面上的圖片按鈕如圖 12。 電池 7.4V 電池 4.8V MathPort Servor command 嘴巴伺服馬達 嘴巴伺服馬達 嘴巴伺服馬達 嘴巴伺服馬達 穩壓器 3.3V
圖 12.網頁控制介面-等待命令中
若使用者按下圖片按鈕後,Java 網頁程式便會立即傳送指令給 MatchPort,MatchPort 將資料送 給伺服馬達控制器,伺服馬達控制器接收到指令後,便會回傳目前的狀態給 Java 程式,並同時執行表 情動作(圖 13),當表情動作執行完畢後,會主動更新狀態,並回傳給 Java 網頁程式,使用者變可以 進行下一個控制動作。
圖 14.Java 網頁控制程式流程圖 寵物機器人控制器程式流程圖如圖 15。 建立連線 顯示連線失 false 傳送等待指令 ture 傳送指令 執行生氣 傳送指令 執行高興 傳送指令 執行想睡 0 10 11 01 10 11 00 Start 使用者選 顯示為高興 顯示為生氣 顯示為想睡 接收機器人狀態 伺服馬達初始 回傳伺服端 狀態為高興 回傳伺服端 狀態為生氣 回傳伺服端 狀態為想睡 執行動作 高興 執行動作 生氣 執行動作 想睡 00 01 10 11 Start 判斷指 狀態設定為
圖 15. 寵物機器人控制器流程圖 結論 現在住在都市的小孩子,養寵物已是一種幻想,養真實寵物,除了娛樂的目的外還伴隨著 許多責任,尤其真實寵物有時候是無法控制的,而寵物機器人則具有真實寵物的優點且沒有真實 寵物的缺點,在這少子化及高齡化的社會,人力資源越來越缺乏,寵物機器人可以解決雙薪家庭 無法挪出時間照顧小朋友的問題,父母可透過公司的網路,連線到寵物機器人,經由寵物機器人 的攝影機或麥克風,得知目前小朋友目前的狀態,並經由網路對寵物機器人下指令,透過寵物機 器人與小朋友互動,增加親子互動。 本論文整合寵物機器人與無線網路架構,結合控制、通訊、介面設計、機構設計等技術,創 造出一個全新的應用平台,此平台未來可再增加感測器,如影像感測器、語音感測器、加速度感 測器…等,即可應用在多種領域中。 參考文獻
[1] M. Fujita,“On activating human communications with pet-type robot AIBO," Proceedings of IEEE, Vol. 92 , Issue 11, November 2004, pp. 1804–1813
[2] K. Wada, T. Shibata, T. Musha, and S. Kimura, “Effects of Robot Therapy for Demented Patients Evaluated by EEG," Proc. of the IEEE/RSJ Int'l Conf. on IROS, pp. 2205-2210, 2005.
[3] Please refer to mit media lab web side ,available at <
http://robotic.media.mit.edu/projects/robots/huggable/overview/overview.html>
[4] Please refer to Ucube web side,available at < http://www.ucube.com.tw/product.php >
[5] Please refer to Gadget Lab web side, available at <
國科會補助專題研究計畫項下出席國際學術會議心得報告
日期:100 年 1 月 18 日一、
參加會議經過 參加2010/12/13~2010/12/15由 IEEE、哈爾濱工業大學深圳研究生院、深圳大學及國立高雄 應用科技大學聯合主辦。這次舉辦在中國大陸深圳市。本次會議共有來自世界各地的國家超過五百位 的教授、學者、研究人員及產業界代表等參與,約超過200篇被接受為壁報展示或口頭報告,內容含蓋 基因演算、演化計算及人工智慧等。為期三天的會議中,超過30個研究主題研討會,非常豐富的研究 內容,提供大家充分的討論和交流的機會。 二、與會心得 參與國際會議瞭解人工智慧目前最新的發展情況、本人所發表的題目是“Parallelized Artificial Bee Colony with Ripple-communication Strategy”,能與在場的專家學者一起討論,並分享彼此的研究內 容與經驗,並獲得人工智慧相關未來的研究方向,讓本人獲益良多。 三、考察參觀活動(無是項活動者略) 無 四、建議 能參與國際會議並獲得能提供人工智慧領域之專家學者互相交換研究心得之機會難得,能激 發跨領域深入的研究,跨領域的整合研究應是未來智慧型機器人的重心,建議國科會能提供並鼓勵學者 參與出席國際會議之機會。計畫編號
NSC 99-2221-E-151-060-
計畫名稱
智慧型語音控制機器人之研製
出國人員
姓名
潘天賜
服務機構
及職稱
國立高雄應用科技大學電子系
會議時間
99 年 12 月 13 日
至
99 年 12 月 15 日
會議地點
中國深圳
會議名稱
1.
(中文)第四屆基因及
演化計算
國際研討會
(英文)Fourth International Conference on Genetic and Evolutionary
Computing
發表論文
題目
(中文)漣波雜訊之平行蜂群演算法策略
(英文) Parallelized Artificial Bee Colony with Ripple-communication
Strategy
五、攜回資料名稱及內容 1. ICGEC 會議議程 2. 會議論文集【光碟】 六、其他
國科會補助計畫衍生研發成果推廣資料表
日期:2011/08/08國科會補助計畫
計畫名稱: 智慧型語音控制機器人之研製 計畫主持人: 潘天賜 計畫編號: 99-2221-E-151-060- 學門領域: 人工智慧無研發成果推廣資料
99 年度專題研究計畫研究成果彙整表
計畫主持人:潘天賜 計畫編號: 99-2221-E-151-060-計畫名稱:智慧型語音控制機器人之研製 量化 成果項目 實際已達成 數(被接受 或已發表) 預期總達成 數(含實際已 達成數) 本計畫實 際貢獻百 分比 單位 備 註 ( 質 化 說 明:如 數 個 計 畫 共 同 成 果、成 果 列 為 該 期 刊 之 封 面 故 事 ... 等) 期刊論文 0 0 100% 研究報告/技術報告 0 0 100% 研討會論文 1 0 100% 篇 論文著作 專書 0 0 100% 申請中件數 1 0 50% 專利 已獲得件數 0 0 100% 件 件數 0 0 100% 件 技術移轉 權利金 0 0 100% 千元 碩士生 1 0 100% 博士生 0 0 100% 博士後研究員 0 0 100% 國內 參與計畫人力 (本國籍) 專任助理 0 0 100% 人次 期刊論文 1 0 50% 研究報告/技術報告 0 0 100% 研討會論文 1 0 50% 篇 論文著作 專書 0 0 100% 章/本 申請中件數 0 0 100% 專利 已獲得件數 0 0 100% 件 件數 0 0 100% 件 技術移轉 權利金 0 0 100% 千元 碩士生 1 0 50% 博士生 0 0 100% 博士後研究員 0 0 100% 國外 參與計畫人力 (外國籍) 專任助理 0 0 100% 人次其他成果