©2010 National Kaohsiung University of Applied Sciences, ISSN 1813-3851
壓電式冷卻系統之設計分析
陳義滄、黃世疇 國立高雄應用科技大學 機械工程系 E-mail : [email protected]摘 要
本研究利用輸入各種電壓於壓電雙晶片,使壓電雙晶片產生不同的伸長位移量,造成耦合擺動,藉以 帶動延伸出的葉片充當放大機構以提供足夠的撓曲變形,增加空氣對流以加速熱傳遞效率,達到散熱的效 果。在模擬分析方面,使用有限元素分析軟體 Ansys 做靜態分析、模態分析與簡諧分析,然後將其分析結 果透過編碼與計算流體力學軟體 Fluent 交流,分析壓電風扇之流場現象與散熱效率。在製程方面,使用 UV-LIGA Like 製程完成壓電風扇外型的製作,利用 SU-8 厚膜光阻來製作外型結構,並探討製程中對外型 厚度的影響。在控制方面,開發一控制系統來作壓電風扇的溫度控制,以改善在使用壓電風扇對發熱元件 散熱時,溫度不穩定的缺點。最後,將所設計之最佳化外型結合 Fuzzy-PID 控制器實際應用在桌上型電腦 ASUS P5LD2-VM 主機板 的內建Intel®ICH7 晶片散熱,並設定溫度控制在 45℃,此時 Intel®ICH7 晶片溫度控制在 45±1℃以內。
關鍵詞:壓電風扇、冷卻系統、田口法、Fuzzy-PID 控制器。
1. 前 言
近年來由於高功率電子元件的發展,加上半導體製程技術的進步,使得許多電子產品都走向高性能、 輕量化、小型化的趨勢。然而電子產品微小化相對的是對元件、系統的散熱造成重大影響。因為在晶片性 能大幅提昇但晶片面積越來越小的情況下,熱通量不斷的增加,許多微電子設備在長時間的連續運行下, 造成當機或元件損壞甚至引起重大的損失,其原因往往只因為某個元件在長時間運作下累積熱量,進而導 致元件性能失效。因此,能有效地散熱便顯得格外的重要,所以在熱設計上,就需要一個有效的散熱方式, 使元件和系統能在穩定的情況下操作。 目前市面的散熱裝置是利用加裝散熱片、旋轉式風扇、增大機殼的通風孔道。若採用壓電式冷卻系統 則可針對某個特定高發熱元件進行風冷,避免散熱裝置的散熱效率低,能量損耗高,機殼過大,產生噪音 等缺點。例如,將壓電(Piezoeletric)式冷卻系統應用在筆記型電腦上,將可改進筆記型風扇產生噪音的缺點, 而且因為壓電式冷卻系統的能耗低,將可延長筆記型電腦的使用時間。此外壓電式冷卻系統也可應用在一 些高發熱的光學裝置,如投影機等,讓使用者能在安靜的環境中欣賞動聽的樂曲與影像。 壓電材料(Piezoelectric material)顧名思義即是一種具有機械能量與電能交換性質的材料,可將機械力轉 成電性變化,電性亦可藉此轉成機械動作。利用這種特性在工業上有極大的用途,例如感測元件、量測頻 率範圍的振動加速度、超音波清洗器、應變規、聲納(Sonar)、麥克風等。 本研究使用一組雙壓電晶片當作致動器,其結構為兩片極性方向相同的壓電片中間置入一金屬片,使 用並聯方式的電路連接,在電場的交互作用下,其中一個壓電片膨脹另一個壓電片收縮,因為兩壓電片結 合在一起,故產生來回的撓曲振動。在設計上,因壓電陶瓷屬於脆性材料,所能產生的撓度小,故以中間 延伸出的 Mylar 葉片作為放大機構,把壓電片產生的撓度透過 Mylar 葉片放大成足夠散熱微電子元件的撓 度。此外並利用有限元素商業軟體(Ansys)做振幅分析、共振頻率分析,與計算流體力學商業軟體(Fluent)做速度場分析、溫度場分析。將兩套模擬軟體做相互配合,並利用田口最佳化法求出最佳散熱效果之壓電 式冷卻系統外型。
最後利用微影製程設備製作出最佳化之壓電式冷卻系統外型,針對一發熱電子元件進行實際驅動冷 卻。研究中設計一溫度控制程式對壓電式冷卻系統進行實際控制,以達到節能省電之效果。
2. 壓電式冷卻系統驅動與外型設計
本文使用壓電風扇是由美國壓電系統公司(Piezo Systems, Inc.)所生產之壓電風扇,作為壓電式冷卻 系統之基本外型,其幾何形狀如圖 1 所示。
研究中以壓電風扇作為散熱系統之基本外型,在前端黏接所設計三種不同長度之扇形外型,最後將壓 電風扇與扇形外型組合在一起,如圖 2 所示,其最終目標是針對 ASUS 主機板型號為 P5LD2-VM 的內建 Intel®ICH7 晶片上之散熱鰭片散熱,其主機板元件配置如圖 3 所示[1]。 64.0 mm 76.7 mm 6.4 mm 2. 2 mm 7. 9 m m 12 .7 m m 2 mm 3 mm (a) 3 mm 扇形外型 64.0 mm 76.7 mm 6.4 mm 2. 2 m m 7. 9 m m 2 mm 6 mm 12 .7 mm (b) 6 mm 扇形外型 64.0 mm 76.7 mm 6.4 mm 2. 2 mm 7. 9 m m 2 mm 9 mm 12 .7 m m (c) 9 mm 扇形外型 圖 2: 壓電風扇與扇形外型組合圖 圖 3: P5LD2-VM 主機板構造圖[1]
3. 壓電式冷卻系統振動分析
3.1 位移理論分析 假設壓電材料與懸臂樑黏覆關係為理想接合如圖 4,在壓電材料上下施加正負電壓,當彎矩情況產生 時,便會使結構產生變形。 懸臂樑 PZT + _ +_ 圖 4: 壓電懸臂樑系統圖 壓電特性和驅動電壓關係可表如式(1)所示[2]: 31 ad
V
t
Λ =
(1) 式中Λ
為壓電特性、d31為壓電應變常數、ta為壓電材料厚度及V 代表驅動電壓值,可以明顯得知壓電應變 與驅動電壓成正比。結構能夠產生位移量,最大原因在於驅動電壓時造成壓電元件產生彎矩效應,式(2)為 彎曲力的求法,式(3)為壓電材料和樑之物理性質純量比[2]。 26
b bt E
M
W
ψ
=
Λ
+
(2) b b a at E
t E
ψ
=
(3) 式中, M:壓電材料兩端之彎曲力矩 W:壓電材料寬度ψ
:壓電材料和樑之物理性質純量比 t:厚度 E:楊氏係數 a:壓電材料 b:樑 當壓電材料受到極化後,產生的的彎曲力矩將會集中在壓電元件兩端,故可將壓電元件視為懸臂樑之 彎曲力,如圖5 所示。 圖 5: 一般懸臂樑系統圖懸臂樑
當一懸臂樑受到純彎矩效應時,而此彎矩值是由公式(2)所得到,應用材料力學懸臂樑公式,即可以求 得位移量為 2
2
ML
y
EI
=
(4) 式中, E:楊氏係數 L:懸臂樑總長 M:壓電元件極化後造成的力矩(2) I:慣性矩 3.2 系統自然頻率理論分析 當單一壓電材料是自由邊界(Free condition),其自然頻率如方程式(5)所示[3]: 111
1
(
)
2
r Ef
L
ρ
S
=
(5) 式中, rf
:自然頻率 L:壓電材料長度ρ
:壓電材料密度 11 ES
:壓電韌度常數 當單一壓電材料以懸臂樑分析時,自然頻率如(6)式所示: 2 2 111
(
)( )
2
12
r Em
t
f
L
S
π
ρ
=
(6) 式中, t:壓電材料厚度 m:共振時的特徵值 根據文獻[4],又可以得到 m1、m2及m3分別為1.8751、4.6941 及 7.8548,代入(6),即可得到 3 個自然 頻率分別如式(7)、(8)、(9)所示: 1 2 111
0.1616 ( )
Et
f
L
ρ
S
=
(7) 2 2 111
1.0129 ( )
Et
f
L
ρ
S
=
(8) 3 2 111
2.8361 ( )
Et
f
L
ρ
S
=
(9)3.3 系統自然頻率理論分析 振動頻率和振型是承受動態荷載結構設計中的重要參數,利用共振頻率特性使Mylar 葉片位移量增大, 可以達到良好的散熱效果。本文首先針對壓電風扇基本外型做 0~600 Hz 之模態分析,發現壓電風扇基本 外型在600 Hz 以內有四組共振頻率,結果如表 1 所示,而其四組共振頻率之振型如圖 6~圖 9 所示,為了使 壓電風扇輸出風量穩定而採用振動外型為平穩的彎矩變形,故使用第一共振頻率進行往後溫度之模擬與實 際控制。 表1. 壓電風扇之共振頻率 模態 共振頻率(Hz) 1 59.566 2 225.12 3 333.45 4 516.65 圖 6: 壓電風扇第一個共振頻率 ( 59.566 Hz) 圖 7: 壓電風扇第一個共振頻率 ( 59.566 Hz)
圖 8: 壓電風扇第三個共振頻率 ( 333.45 Hz) 圖 9: 壓電風扇第三個共振頻率 ( 333.45 Hz) 針對壓電風扇黏接所設計之3 mm、6 mm、9 mm 長之扇形外型進行模態分析,得知 0 ~ 600 Hz 內之四 個共振頻率,結果如表2 所示,而 3 mm、6 mm、9 mm 長扇形外型之第一振型如圖 10~圖 12 所示。 表2. 設計扇形外型之共振頻率 模態 1 st 3 mm 扇形外型共振頻率(Hz) 49.424 6 mm 扇形外型共振頻率(Hz) 45.206 9 mm 扇形外型共振頻率(Hz) 41.378 圖 10: 壓電風扇+3 mm Trapezoid 第一個共振頻率(49.424 Hz)
圖 11
:
壓電風扇+6 mm Trapezoid 第一個共振頻率( 45.206 Hz) 圖 12:
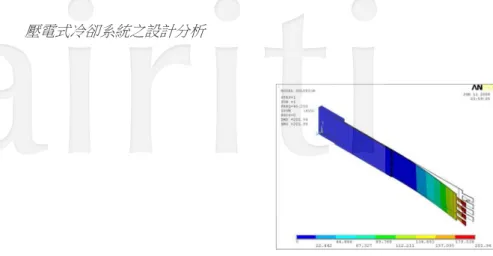
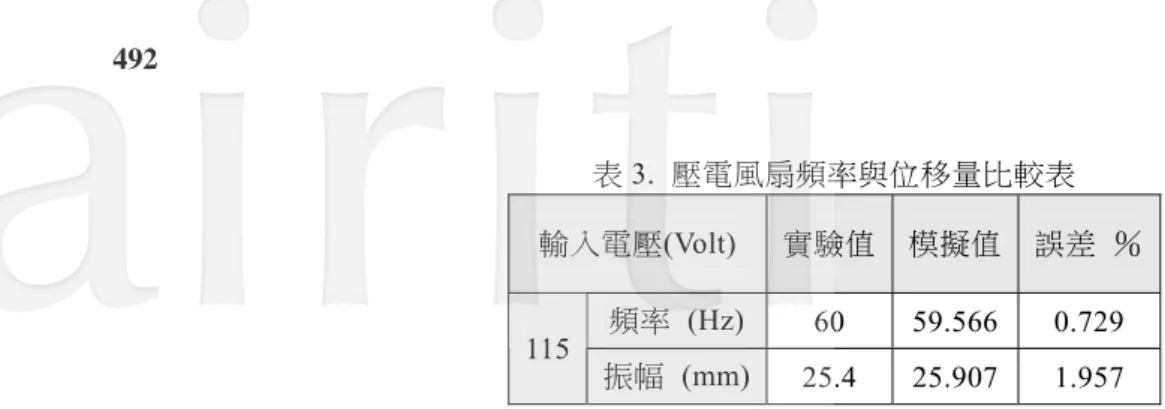
壓電風扇+9 mm Trapezoid 第一個共振頻率(41.378 Hz) 3.4 簡諧分析 經由模態分析得出壓電風扇共振頻率後,進行簡諧分析求出施加電壓所產生共振位移量,當壓電風扇 輸入115 伏特電壓時,設定簡諧分析範圍為 0~600 Hz,STEP 設定為 300,即將簡諧分析範圍分成 300 等分, 其動態響應如圖13。由圖可發現當頻率在 60 Hz,會產生最大的振幅響應,振幅量為 25.907 mm,在此振幅 定義為峰對峰值(peak-to-peak),表 3 為振幅量比較表,將模擬值減實際值除於模擬值比較後,誤差約在 2 % 以內。 (Hz) (m) 頻率=60 Hz 振幅=25.907 1st 圖 13: 壓電風扇動態響應圖表3. 壓電風扇頻率與位移量比較表 輸入電壓(Volt) 實驗值 模擬值 誤差 % 頻率 (Hz) 60 59.566 0.729 115 振幅 (mm) 25.4 25.907 1.957 在驗證 Ansys 對基本外型壓電風扇之模態與簡諧分析可靠度後,針對壓電風扇黏接所設計之 3mm、 6mm、9mm 長之扇形外型進行簡諧分析,在經模態分析得知三種外型之第一共振頻率皆落在 100 Hz 以內, 故設定簡諧分析範圍為0~100 Hz,STEP 設定為 100,以減少所分析的時間,其結果如圖 14~圖 16 所示。 (Hz) (m) 1st 頻率=49 Hz 振幅=25.33 mm 圖 14
:
壓電風扇+3 mm Trapezoid 動態響應圖 (Hz) (m) 頻率=45 Hz 振幅=33.65 mm 1st 圖 15:
壓電風扇+6 mm Trapezoid 動態響應圖(Hz) (m) 頻率=41 Hz 振幅=72.19 mm 1st 圖 16
:
壓電風扇+9 mm Trapezoid 動態響應圖4. 壓電式冷卻系統流場分析
4.1 速度場分析 本文利用計算流體力學軟體 Fluent 模擬分析壓電式冷卻系統各項參數對氣體流速、流場之影響。模擬 邊界條件為2D 環境,假設壓電風扇置於一個加熱器前端 6 mm 處,使用 30 cm×30 cm 的方形壓克力外殼隔 絕外界溫度干擾,空間內的流體性質設定為空氣,如圖17 所示。並將 Ansys 所分析之壓電風扇振動特性, 透過編寫UDF(User-Defined Function)程式碼方式與 Fluent 做結合應用。movement state heater acrilan base support pzt mylar bed Anti-Vibration Tables 圖 17
:
壓電式冷卻系統模擬架構圖 本文模擬當啟動壓電式冷卻系統,其空氣的流動方式使用Fluent 內建之紊流模型 k-ε 與使用非穩態求解 器求解,在壓電風扇施加振幅25.4 mm、頻率 60 Hz 後,產生之最大流速為 13.7 m/s,其速度場分佈如圖 18 所示,由圖可發現速度流場產生一組相對的渦流現象,此現象將有利於將加熱器表面溫度迅速擴散到空氣 之中。(m/s) 圖 18
:
壓電風扇速度場分佈圖 4.2 溫度場分析 在Fluent 中設定各個材料性質後,施加能量為 207200 w/m3於一7 cm×38 cm 的矩形鋁加熱器,並訂定 空間初始溫度為23 ℃後,使用穩態求解器進行疊代運算求解,經過 13 次疊代後達到收斂穩定。此時,熱 源表面平均溫度為64.47 ℃,溫度場分佈如圖 19 所示,其溫度在自然對流之下,均勻的從熱源表面擴散到 整個空間。接下來使用k-ε 紊流模型與非穩態求解器求解,在壓電風扇施加振幅 25.4 mm 與頻率 60 Hz 之後, 熱源之表面平均溫度從64.47 ℃下降至 40.14 ℃到達穩定,其溫度場分佈如圖 20 所示。 X Y -0.15 -0.1 -0.05 0 0.05 0.1 0.15 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 temperature 336 334 332 330 328 326 324 322 320 318 316 314 312 310 308 306 304 302 300 298 (m) (m) k 圖19:
加熱器溫度場分佈圖 X Y -0.15 -0.1 -0.05 0 0.05 0.1 0.15 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 temperature 336 334 332 330 328 326 324 322 320 318 316 314 312 310 308 306 304 302 300 298 k (m) (m ) 圖 20:
啟動壓電風扇之溫度場分佈圖4.3 模擬環境之實現與驗證 利用 AD590 溫度感測器將熱源表面的溫度訊號轉成電壓訊號後,透過資料擷取卡(NI-6014)將電壓 訊號輸入至個人電腦,然後使用Labview 控圖程式設計出一人機介面,如圖 21 所示,以便容易觀察溫度變 化情況。首先將加熱器從從23 ℃開始加熱至平衡穩定後,此即為加熱器之溫度上限,之後再使用 115 V 電 壓啟動壓電式冷卻系統使溫度下降至穩定,此即為加熱器之溫度下限,如圖 22 所示。最後將實驗數據與 Fluent 模擬軟體相互比較,其結果如表 4 所示,驗證其模擬軟體之準確性相當可靠。 圖 21: 溫度監測之人機介面 圖 22: 使用 115V 壓電式冷卻系統實際冷卻 表4. 壓電風扇模擬溫度與實際溫度比較表 冷卻系統狀態 實驗值℃ 模擬值℃ 誤差% 啟動前 65.85 64.47 2.14 啟動後 42.84 40.14 6.73
5. 田口最佳化模擬分析
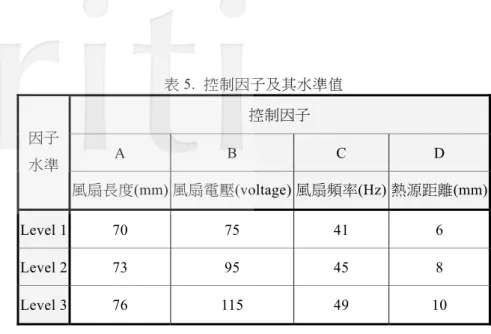
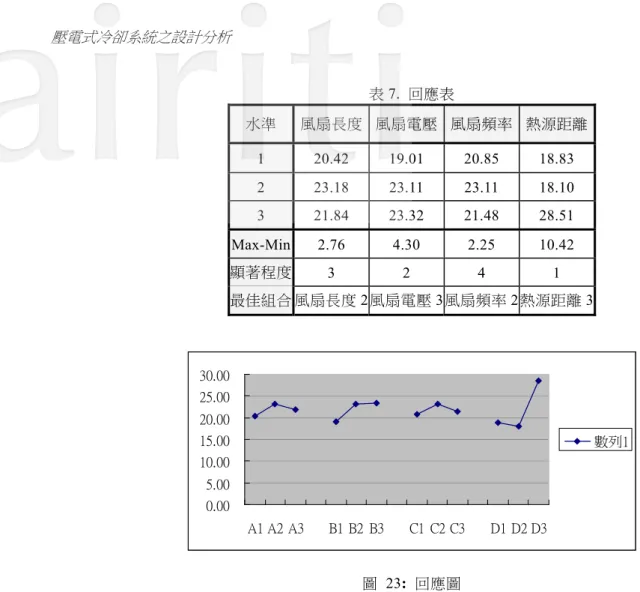
本文利用田口最佳化法探討冷卻系統長度、電壓、頻率及與熱源間之距離等參數對壓電式冷卻系統散 熱效率之影響[5]。研究分析以發熱元件之散熱效率為品質目標,散熱量愈大愈好,為望大特性。根據水準 表和L9直交表進行各個實驗參數組合的流場分析,並以望大特性將分析所得的熱源表面溫度數據進行最佳 參數之計算。表5 所示為採用之控制因子及其水準值。A 因子為風扇長度、B 因子為風扇電壓、C 因子為風 扇頻率以及D 因子為熱源距離,將控制因子與水準值利用 L9直交表法計算出S/N 比[6],如表 6 所示。表5. 控制因子及其水準值 控制因子 A B C D 因子 水準 風扇長度(mm) 風扇電壓(voltage) 風扇頻率(Hz) 熱源距離(mm) Level 1 70 75 41 6 Level 2 73 95 45 8 Level 3 76 115 49 10 表6. CAE 分析 S/N 比 A B C D L9 1 2 3 4 △T(℃) S/N 1 1 1 1 1 4.831 13.681 2 1 2 2 2 9.216 19.291 3 1 3 3 3 25.971 28.290 4 2 1 2 3 26.225 28.374 5 2 2 3 1 11.423 21.156 6 2 3 1 2 10.011 20.009 7 3 1 3 2 5.615 14.988 8 3 2 1 3 27.774 28.873 9 3 3 2 1 12.099 21.655 將上表列之S/N 比繪製出回應表及回應圖,如表 7、圖 23 所示。由回應表及回應圗可以得知 D 因子熱 源距離最為顯著,其次為B 因子風扇電壓及 A 因子風扇長度,而 C 因子風扇頻率影響最小。由回應圖以及 回應表可得到最佳之參數組合為A2B3C2D3。
表7. 回應表 水準 風扇長度 風扇電壓 風扇頻率 熱源距離 1 20.42 19.01 20.85 18.83 2 23.18 23.11 23.11 18.10 3 21.84 23.32 21.48 28.51 Max-Min 2.76 4.30 2.25 10.42 顯著程度 3 2 4 1 最佳組合 風扇長度 2風扇電壓 3風扇頻率 2熱源距離 3 0.00 5.00 10.00 15.00 20.00 25.00 30.00 A1 A2 A3 B1 B2 B3 C1 C2 C3 D1 D2 D3 數列1 圖 23: 回應圖 上述控制因子皆假設效果不互相影響,即為因子間無交互作用,然而在實際情況下並非如此;很可能 因子之間是存有因素水準互相影響,故本研究將分別對各因子進行交互作用分析,表8 為各因子配置表。 表8. 各因子配置表 實驗次數 風扇長度風扇電壓風扇頻率熱源距離 S/N 1 A1 B1 C1 D1 13.681 2 A1 B2 C2 D2 19.291 3 A1 B3 C3 D3 28.290 4 A2 B1 C2 D3 28.374 5 A2 B2 C3 D1 21.156 6 A2 B3 C1 D2 20.009 7 A3 B1 C3 D2 14.988 8 A3 B2 C1 D3 28.873 9 A3 B3 C2 D1 21.655
交互作用計算結果得到 A×C、B×A、B×C、C×A、C×B 之間存在有交互作用,而 A×B、A×D、B×D、 C×D 則無交互作用。接著由回應表中最為顯著之控制因子即為熱源距離之第三水準 D3 與其他各水準相配 以得到交互作用下的最佳參數組合,其交互配置如下表表9 至表表 11 所示。 表9. D3 因子與 A1A2A3 因子之影響程度 交互 作用 D3 A1 28.290 A2 28.374 A3 28.873 表10. D3 因子與 B1B2B3 因子之影響程度 交互 作用 D3 B1 28.374 B2 28.873 B3 28.290 表11. D3 因子與 C1C2C3 因子之影響程度 交互 作用 D3 C1 28.873 C2 28.374 C3 28.290 將D3 與其他水準相配後,可以得到因子交互作用之顯著因子組合為 A3B2C1,再與 D3 組合後可以發 現,此組交互作用下之因子組合與L9直交表第八組配置組合相同,其S/N 也是此 L9直交表因子組合內S/N 比最大之參數,故可得到最佳交互作用出的最佳化參數會出現在L9直交表因子組合內,即為交互作用最佳 參數組合。 藉由 ANOVA 分析可得到貢獻度比,也可彌補田口式實驗之實驗參數對品質特性之影響,能補償誤差 程度不足處。在表12 為變異數分析配置表中,經計算得到熱源距離貢獻度 78.71%為最高,其次為風扇電壓 13.71%。推定最佳因子組合當以熱源距離與風扇電壓為優先考量,並依據回應表、回應圖及變異數分析之 結果推定最佳因子組合,所得之最佳因子組合為A2B3C2D3。 27.800 28.000 28.200 28.400 28.600 28.800 29.000 1 2 3 D3與A因子 影響程度值 27.800 28.000 28.200 28.400 28.600 28.800 29.000 1 2 3 D3與B因子 影 響程度 值 27.800 28.000 28.200 28.400 28.600 28.800 29.000 1 2 3 D3與C因子 影響 程度值
表12. 變異數分析
因子
變動(S) 自由度(F) 變異(V)
純變動(S') 貢獻度
A.風扇長度 Sa = 11.42
2
Va = 5.71 Sa' = 11.42 4.43 %
B.風扇電壓 Sb = 35.31
2
Vb = 17.65 Sb' = 35.31 13.71 %
C.風扇頻率 Sc = 8.12
2
Vc = 4.06
Sc' =8.12 3.15 %
D.熱源距離 Sd = 202.77
2
Vd =101.39Sd' = 202.77 78.71 %
e.誤差
Se = 0.00
0
0.00
e
T.誤差調和 Se
T= 0.00
0
Ve
T= 0.00 Se
T '= 0.00 0.00 %
ST 總和 ST = 257.62
8
ST' = 257.62 100.00
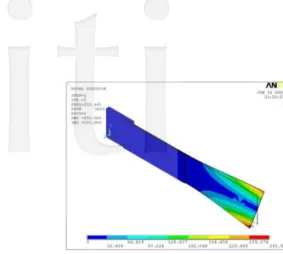
為顯示CAE 分析的可靠度與正確性,將此參數帶回 Fluent 分析,所得溫度散熱量為 29.594℃,溫度分 佈如圖24 所示,S/N 比值為 29.424dB,雖與預測結果計算值不同,但由最佳參數組合與直交表參數組合進 行分析之散熱量比較後可得知,由田口最佳化法的最佳參數組合所分析結果是可以增加散熱量的,故此組 合是可達到增加散熱效率的效果。 X Y -0.15 -0.1 -0.05 0 0.05 0.1 0.15 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 total-temperature 336 334 332 330 328 326 324 322 320 318 316 314 312 310 308 306 304 302 300 (m) (m) k 圖 24:
最佳參數組合模擬之散熱量6. 製程分析
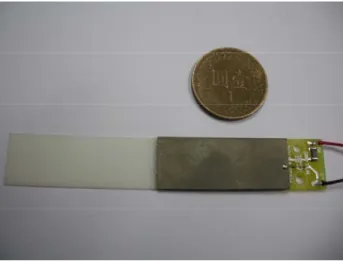
本計畫製程步驟如圖25 所示,製程是使用雙層 SU-8 厚膜光阻配合犧牲層技術: 步驟一、在晶圓上濺鍍一層約3000Å 的鉻金屬作為中介層。 步驟二、在鉻上濺鍍一層約3000Å 的銅作為犧牲層。 步驟三、先在銅上利用塗佈機,分兩階段旋轉塗佈厚度約100µm 的 SU-8 厚膜光阻,靜置後進行軟烤。 步驟四、經曝光及曝後烤,進行顯影,可在 SU-8 光阻上得到扇形外型結構,曝光方式是使用接觸式 曝光方式。 步驟五、顯影後,再以氯化鐵將犧牲層銅移除,即可得到壓電式冷卻系統外型,其結構如圖26 所示。 圖 25:
壓電式冷卻系統外型製程流程圖 2 mm 圖 26:
壓電式冷卻系統外型7. 控制設計與系統實現
本文為降低外在環境干擾,驗證其 Fuzzy-PID 之可行性,針對前述之實際架構進行溫度控制。經由控 制器設計後,透過個人電腦達到即時控制,圖27 為實驗之硬體架構方塊圖,使用套裝軟體 Labview 撰寫溫 度控制程式,控制壓電式冷卻系統輸出電壓量。在類比輸出方面,採用美商國家儀器 NI-6014 介面卡,其 具有16 bit D/A 轉換器,轉換後的類比輸出控制命令再經由功率放大器放大之後,用以驅動壓電式冷卻系 統。功率放大器(SVR 150-3),輸出電壓範圍為 -115~115V,放大倍率為 11.5 倍,回授則是藉由 AD590 量 取溫度訊號,溫度訊號透過A/D 轉換器讀回電腦,再經由電腦運算,如此,即完成整個閉迴路控制系統, 圖28 為實驗硬體架構實體圖。 功率放大器 A/D Card 加熱器 CCD 功率控制電路 D/A Card 壓電式風扇 顯微鏡 電腦 雷射位移計 AD 590 ℃ Labview 控制程式 數位溫度計 圖 27:
實驗之硬體架構方塊圖 圖 28:
實驗硬體架構實體圖(PTC 加熱器) 當發熱元件產生熱量,使機殼內溫度升高,則溫度檢測電路把溫度變化信號送回輸入端和給定的溫度 進行比較,再產生偏差、偏差變化率信號,經模糊控制器進行模糊化與解模糊化所產生控制信號,對K
p、 iK
、K
d進行調整,進而對壓電式冷卻系統進行更準確的控制。Fuzzy-PID 溫度控制系統結構如圖 29 所示。de/dt Fuzzy規則 PID控制器 壓電式冷卻系統 - 輸入 e + △ Kd △ Kp △ Ki 輸出 KP=kP’+△kp KI =kI ’ +△ki KD=kD’+△kd 圖 29
:
Fuzzy-PID 方塊圖 本文是將溫度訊號偏差與偏差變化率乘以一個比例因子,使之模糊量化,並訂定△K
p、△K
i、△K
d 均為[-6,6]值域的模糊集合函數,輸入與輸出變數的語言值均分為七個語言值:NB、NM、NS、O、PS、PM、 PB,歸屬度函數採用靈敏性強的三角函數,為增強系統的穩健性,提高歸屬度函數的分辨率,在 0 值附近 的函數形狀取的更陡,如圖30 所示;依調整經驗和技術知識總結成為 IF(條件)THEN(結果)形式的 49 條模糊規則,如表13~表 15 所示[7]。本文控制器解模糊化採用重心法求取輸出量的精確值。 值域 -1.5~1.5 圖 30: 模糊歸屬度函數 表13. 模糊△Kp參數規則表[7] NB NM NS O PS PM PB NB PB PB NB PM PS PS O NM PB PB NM PM PS O O NS PM PM NS PS O NS NM O PM PS O O NS NM NM PS PS PS O NS NS NM NM PM O O NS NM NM NM NB PB O NS NS NM NM NB NB E Kp Ec △ 表14. 模糊△Ki參數規則表[7] NB NM NS O PS PM PB NB O O NB NM NM O O NM O O NM NM NS O O NS O O NS NS O O O O O O NS NM PS O O PS O O O PS PS O O PM O O PS PM PM O O PB O O NS PM PB O O E Ki Ec △表15. 模糊△Kd參數規則表[7] NB NM NS O PS PM PB NB PS PS O O O PB PB NM NS NS NS NS O PS PM NS NB NB NM NS O PS PM O NB NM NM NS O PS PM PS NB NM NS NS O PS PS PM NM NS NS NS O PS PS PB PS O O O O PB PB E Kd Ec △ 因 PID 控制器之
K
P,K
I,K
D皆為一固定值,故對 PID 參數進行及時微調將有助於溫度更有效之控制 [8]。由於模糊控制器的輸入、輸出變量都是精確量,模糊推理是針對模糊量進行的,因此,控制器首先要 對輸入量進行模糊化處理。故首先從實驗中求得溫度上下限範圍與溫度變化率大小,其值如下所示: e 的基本論域為:〔43℃,66℃〕 ec 的基本論域為:〔-0.3,0.1〕 △Kp 的基本論域為:〔-1,1〕 △Ki 的基本論域為:〔-0.004,0.004〕 △Kd 的基本論域為:〔-0.001,0.001〕 以上各變量的模糊量分別為:E、EC、△KP、△KI、△KD,其論域均為〔-6,-5,-4,-3,-2, -1,0,1,2,3,4,5,6〕,由於在實際工作中,輸入量的範圍一般不會落在[-6,6]之間,如果其實際範圍 在[a,b]之間,可透過式(10)的轉換使之落於[-6 , 6]之間:12
2
a b
y
x
b a
+
⎡
⎤
=
⎢
−
⎥
− ⎣
⎦
(10) 採用重心法求取輸出量的精確值,得出模糊判決後的清晰量(y*)。將 y*乘於一輸出量的比例因子,各 修正參數比例因子為: * * *1/ 6
1/1500
1/ 6000
p p i i d dk
y
k
y
k
y
Δ =
×
Δ =
×
Δ =
×
(11) 輸入到PID 控制器的參數由下列公式計算得出: ' ' ' P P p I I i D D dk
k
k
k
k
k
k
k
k
=
+ Δ
=
+ Δ
=
+ Δ
(12) 最後將上述所設計之 PID 參數與 Fuzzy 規則相互結合應用在壓電式冷卻系統對加熱器散熱,控制介面 如圖31 所示[9]。此時,量測出的壓電式冷卻系統溫度訊號在 50±1 ℃以內,此 Fuzzy-PID 溫度控制器相較 於一般 PID 溫度控制器,不論在最大超越量、穩態誤差、趨穩時間等有更加良好的控制能力,其控制結果 如圖32 所示。Fuzzy-PID 輸出量 圖 31
:
Fuzzy-PID 控制器程式圖 32
:
Fuzzy-PID 控制溫度 (PTC 加熱器)在證明 Fuzzy-PID 比傳統 PID 有更好的控制效果後,將 Fuzzy-PID 應用在 Intel®ICH7 晶片散熱。首先
將壓電式冷卻系統黏接上所設計之6 mm 長扇形外型並配置田口最佳化參數,其實驗硬體架構實體如圖 33 所示。
針對 Intel®ICH7 使用 Z-N 法則求出 PID 參數為
5.287
PK
=
、K
I=
0.056
、K
D=
0.013
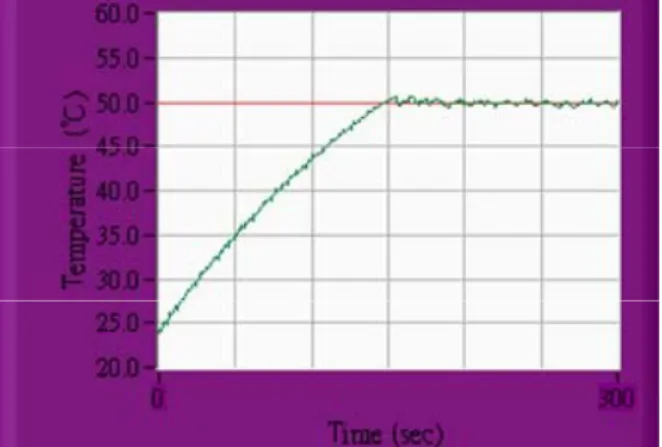
後,並依據 溫度誤差與誤差變化率訂定出Fuzzy 論域,其值如下所示: e 的基本論域為:〔36℃,53℃〕 ec 的基本論域為:〔-0.15,0.1〕 △Kp 的基本論域為:〔-1,1〕 △Ki 的基本論域為:〔-0.004,0.004〕 △Kd 的基本論域為:〔-0.001,0.001〕 以上各變量的模糊量分別為:E、EC、△KP、△KI、△KD,其論域均為〔-6,-5,-4,-3,-2, -1,0,1,2,3,4,5,6〕。最後將上述所設計之 PID 參數與 Fuzzy 規則相互結合應用在壓電式冷卻系統 對Intel®ICH7 晶片之散熱,此時,量測出的壓電式冷卻系統溫度訊號,如圖 34 所示。圖 34
:
Fuzzy-PID 控制溫度與輸出電壓(Intel®ICH7 晶片)(
K
P=
5.287
、K
I=
0.056
、K
D=
0.013
)8. 結論
本文以壓電雙晶片結合振動理論,利用輸入不同電壓於壓電雙晶片,使壓電雙晶片產生不同的伸長位 移量,產生耦合擺動,並帶動延伸出的葉片充當放大機構以提供足夠的撓曲變形,增加空氣對流加快熱傳 遞的效率,達到散熱的效果。文中完成系統靜態分析、動態分析、及流場現象與散熱效率。然後以UV-LIGA Like 製程完成,並結合最佳 PID 參數值與 Fuzzy-PID 控制器的設計,以改善在使用壓電風扇對發熱元件散 熱時,溫度不穩定的缺點,並避免過度冷卻造成能量浪費,達到節能省電的效果。最後,將所設計之系統 應用於桌上型電腦ASUS P5LD2-VM 主機板的內建 Intel®ICH7 晶片散熱,設定溫度在 45℃,實驗證明此時
Intel®ICH7 晶片溫度確能控制於 45±1℃。
誌 謝
參考文獻
[1] AS-D670 P5LD2-VM Main Board Manual, ASUS Inc. ,2006.
[2] 王栢村,曾文饒,「壓電材料樑靜態響應分析」,第十八屆全國力學會議,339-345 頁,新竹,12 月 9-10 日,1994。 [3] Haiyan Chin, Dengren Jin, “Dynamic Characteristics of Functionally Gradient Piezoelectric Actuators,” Proceedings of
the 6th International Conference on Properties and Applications of Dielectric Materials, pp.983-987,2000.
[4] W. P. Mason, Electromechanical Transducers and Wave Filters, D. Van Nostrand Co., New York, pp. 211-236,1942. [5] 李輝煌,田口方法-品質設計的原理與實務,台北:高立圖書,2000。
[6] 陳耀茂,田口實驗計畫法,台中:滄海書局,1997。
[7] 張會敏,何永義, 「Fuzzy-PID 算法在爐溫控制中的應用」,自動化與儀器儀表,3 期,頁 27-30 頁,5 月,2002。 [8] 張道弘, PID 控制理論與實務,全華圖書,1997。

![表 15. 模糊△ K d 參數規則表[7] NB NM NS O PS PM PB NB PS PS O O O PB PB NM NS NS NS NS O PS PM NS NB NB NM NS O PS PM O NB NM NM NS O PS PM PS NB NM NS NS O PS PS PM NM NS NS NS O PS PS PB PS O O O O P](https://thumb-ap.123doks.com/thumbv2/9libinfo/8832448.235745/20.892.36.622.66.321/NMOPSPMONBNMNMNSOPSPMPSNBNMNSNSOPSNSOPSPSPBPSOOOOP.webp)