國
立
交
通
大
學
土木工程研究所
博 士
論
文
衛星影像的灘線辨識及其應用至灘線
變遷之研究
Shoreline detection of Satellite images and its
application to beach evolution
研 究 生:陳蔚瑋
指導教授:張憲國 教授
衛星影像的灘線辨識及其應用至灘線變遷之研究
Shoreline detection of Satellite images and its
application to beach evolution
研 究 生:陳蔚瑋 Student:Wei-Wei Chen 指導教授:張憲國 Advisor:Hsien-Kuo Chang 國 立 交 通 大 學 土 木 工 程 研 究 所 博 士 論 文 A Thesis
Submitted to Institute of Civil Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of PhD
in
Civil Engineering
July 2010
Hsinchu, Taiwan, Republic of China
衛星影像的灘線辨識及其應用至灘線變遷之研究
研究生:陳蔚瑋 指導教授:張憲國 博士
國立交通大學土木工程研究所
中文摘要
本研究主要提出灘線平移修正法(one-line shifting method, OSM) 配合往昔研究的波浪變形經驗公式,將不同時間衛星影像所擷取出來 的灘線位置平移至平均潮位的位置,使各灘線位於同一基準上以便進 行比較分析。另外並透過潮位資料融合法,修正臺灣西海岸的潮污能 量消散,使 Nao.99b 潮位模式的均方根誤差在 10cm 以下,其誤差改 善率在西部海岸為 64%,西南海岸為 73%,東部海岸為 17%。在已 知近岸底床坡度的情況下測詴出 Mase(1989)所提出的 R2%為最合適的 溯升經驗公式。本研究建立一完整的流程在底床坡度未知的情況下, 亦可由結合 OSM 與潮位、波浪溯升及平均水位抬升三影響修正的最 佳疊代方法決定之。 本文應用所提衛星影像擷取灘線方法來分析外傘頂洲、臺南安平 養灘區域及臺中港北側淤沙區三處灘線的變化。由結果發現自 1999 年以來外傘頂洲面積逐漸變小,並漸漸向東邊的臺灣本島靠近,呈現 一陸化的現象。臺南安平養灘區域在馬刺型突堤興建後有中央侵蝕, 北側淤積的現象,並約於 2005 年年底開始趨於穩定。臺中港北淤沙 區的灘線分析結果顯示臺中港北堤至北攔沙堤間的沙灘段自 1993 年 開始由於臺中港北堤的擴建工程而持續有淤積的現象直至 2004 年趨 於穩定。在無實測海岸地形資料下,本研究方法可提供大區域海岸規 畫利用及環境評估所需海灘變遷評估工作之參考。
Shoreline detection of Satellite images and its
application to beach evolution
Author:Wei-Wei Chen Advisor:Dr. Hsien-Kuo Chang Institute of Civil Engineering National Chiao Tung University
ABSTRACT
The one-line shift method (OSM) is proposed to determine MWL-datum-based shoreline positions of three sequential satellite images considering tidal variations, wave run-up and wave set-up in the thesis. Accurate calculation of tidal levels at research site where tidal observation is unavailable is also developed through spatial data interpolation based on originally simulated tidal level by the NAO.99b model. The corrected tidal calculation was examined valid by a root mean squared error less than 10 cm for all examined places around Taiwan and by modification on relative error up to 64% for western waters, to 73% for south-western waters and to 17% for eastern waters. When the beach slope is known, empirical expression of R2% proposed by Mase(1989) is examined best for modification on shoreline detection considering wave’s runup among all existed formula of runup. When the beach slope is unknown, an applicable procedure is also proposed to correct shoreline detection through optimization of shoreline original obtained by the proposed OSM method and correction for wave’s runup and setup.
The proposed method was applied to investigate the shoreline revolution at the Waisanding Sandbar, Anping beach and north beach of Taichung Harbor. The result indicates that the Waisanding Sandbar is migrating landward to the west of Taiwan since 1999 and its whole area is decreasing by a fast rate. The Anping beach between two breakwaters acts with beach receding at the central part and proceeding at the northern
beach. The northern beach of Taichung Harbor has a continuous shoreline accretion after the extension of northern breakwater in 1993 until 2004 and keeps beach stable since 2004. The proposed method of shoreline detection of some satellite images can be applicable for an evaluation on beach evolution in coastal engineering planning and environmental assessment when topographical data is unavailable.
誌謝
求學期間,恩師張憲國教授在為人處世、治學態度與研究方法 上之諄諄教誨與潛移默化,使我在交通大學的研究生涯中受益匪 淺,在此表達由衷的感謝與敬意。論文撰寫時,承蒙林銘崇教授、 史天元教授、張中白教授與何良勝博士提供寶貴意見與指導,使本 文更趨完善。感謝港灣技術研究中心提供機會能透過合作研究計畫 讓我能接觸到更多海岸工程與海洋科學的研究範疇。承蒙國科會專 題研究計畫「考慮潮污與波浪溯升因素以衛星影像監測灘線變遷之 可行性研究」(編號 NSC97-2221-E-009-182-MY3)經費之補助使本 研究得以順利完成,謹致謝忱。 感謝研究室的伙伴們,在研究期間對研究計畫的協助及好友們 在研究上的幫忙與鼓勵,因為有你們的陪伴,使得研究與學習的生 涯更加多采多姿。 父母、愛妻與好友們長期的關懷與照顧是我研究旅途上最大的 支柱,感謝您們在這些日子的支持與鼓勵,使我能有更多的力量繼 續完成學業,僅以本文獻給您們。目 錄
中文摘要 ... i ABSTRACT ... ii 誌謝 ... iv 目 錄 ... v 圖目錄... vi 表目錄... ix 符號說明 ... x 第一章 緒論 ... 1 1-1 研究動機與目的 ... 1 1-2 研究方法與步驟 ... 2 1-3 文獻回顧 ... 4 第二章 衛星影像的灘線擷取技巧及修正方法 ... 7 2-1 衛星影像處理 ... 7 2-1-1 影像資料來源 ... 7 2-1-2 影像的前置處理 ... 9 2-1-3 原始灘線的擷取方法 ... 14 2-1-4 多頻譜影像的處理 ... 17 2-2 潮位推估與資料融合 ... 19 2-3 考慮潮位變化之灘線修正 ... 27 2-4 已知底床坡度情況下考慮波浪溯升與抬升之灘線修正 ... 30 2-5 未知底床坡度情況下之灘線修正 ... 34 第三章 方法驗證與工程應用 ... 36 3-1 臺灣潮位推算之應用 ... 36 3-2 外傘頂洲之長期灘線變遷 ... 37 3-3 安平養灘區段灘線監測 ... 40 3-4 臺中港防波堤擴建之灘線變遷 ... 44 3-5 最佳溯升公式及底床坡度之推估 ... 53 第四章 結論與建議 ... 57 4-1 結論 ... 57 4-2 建議 ... 59 參考文獻 ... 60圖目錄
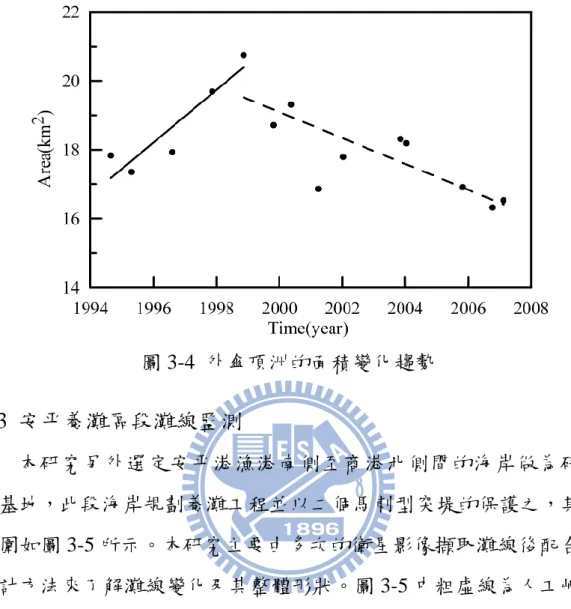
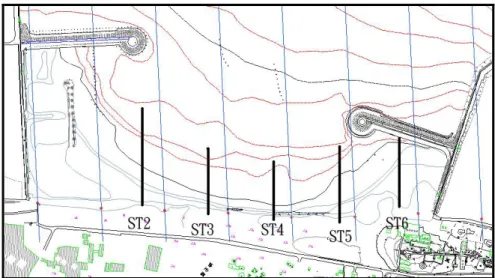
圖 2-1 全幅影像與涵蓋海岸線範圍(超解像模式) ... 10 圖 2-2 不同的拍攝條件下所拍攝的衛星影像 ... 10 圖 2-3 衛星影像的亮度直方圖 ... 11 圖 2-4 各張衛星影像經過直方圖等化後的亮度直方圖 ... 12 圖 2-5 經過直方圖等化後的衛星影像 ... 12 圖 2-6 影像強化中所使用的各式映射函數 ... 13 圖 2-7 經由影像強化後的衛星影像 ... 14 圖 2-8 經由 Canny 檢測器邊緣偵測所得的二值影像 ... 16 圖 2-9 初步擷取衛星影像的灘線位置 ... 16 圖 2-10 細線化的原始灘線位置 ... 17 圖 2-11 FORMOSAT-2 多光譜影像的可見光所融合成的影像 ... 18 圖 2-12 近紅外光以及紅光所組成臺南安平海岸的 NDVI 影像 ... 18 圖 2-13 NAO.99b 推算東石測站潮位與實測值的比較 ... 23 圖 2-14 西太平洋的 M2 分潮能量消散率分布圖(Matsumoto,2000) ... 24 圖 2-15 臺灣四周海域同潮位圖(莊與江,2006) ... 25 圖 2-16 潮位的空間內插示意圖(以東石測站為例) ... 27 圖 2-17 外傘頂洲之地理位置圖 ... 28 圖 2-18 三張不同時間衛星影像的潮位及海灘底床剖面示意圖 ... 29圖 2-19 平均水位抬升示意圖 ... 32 圖 2-20 波浪溯升示意圖 ... 33 圖 2-21 乾濕沙地的交界線(左上部分為海面碎波帶,右下部分為沙 灘,中間白色箭頭標示處亮度較暗處即可看出濕沙地) ... 33 圖 2-22 未知底床坡度情況下之灘線修正流程 ... 35 圖 3-1 NAO.99b 模式推算東石測站潮污及資料融合修正後的潮位與 實測資料之比較 ... 36 圖 3-2 選擇海側及陸側的四個代表斷面的位置圖 ... 38 圖 3-3 四個代表斷面的灘線離岸位置 ... 39 圖 3-4 外傘頂洲的面積變化趨勢 ... 40 圖 3-5 安平港漁港南側至商港北側間的安平海岸 ... 41 圖 3-6 上圖海岸的現場拍攝照片(2005) ... 41 圖 3-7 將海岸線位置修正至平均潮位 ... 42 圖 3-8 選擇斷面的位置示意圖 ... 44 圖 3-9 五條斷面的海岸線變化 ... 44 圖 3-10 擷取出的衛星影像平均水位灘線位置 ... 45 圖 3-11 北攔沙堤以北靠近大甲溪口的淺灘地形區域 ... 46 圖 3-12 衛星影像中平均水位灘線與實測地形之比較(1997) ... 47 圖 3-13 衛星影像中平均水位灘線與實測地形之比較(2003) ... 47
圖 3-14 以 1993 為基準年的灘線離岸距離變化量 ... 48 圖 3-15 選擇臺中港北堤六個斷面的位置示意圖 ... 49 圖 3-16 斷面 P1 的灘線變化圖 ... 50 圖 3-17 斷面 P2 的灘線變化圖 ... 51 圖 3-18 斷面 P3 的灘線變化圖 ... 51 圖 3-19 斷面 P4 的灘線變化圖 ... 52 圖 3-20 斷面 P5 的灘線變化圖 ... 52 圖 3-21 斷面 P6 的灘線變化圖 ... 53 圖 3-22 經過波浪修正以及潮位修正的灘線位置 ... 55 圖 3-23 估算底床坡度與實測底床坡度的比較圖 ... 56
表目錄
表 2-1 SPOT 系列衛星資料的基本特性 ... 8 表 2-2 FORMOSAT-2 衛星資料的基本特性 ... 9 表 2-3 推算臺灣海岸地區各潮位站之誤差 ... 22 表 2-4 選擇臺中港衛星影像的時間與海象資料表 ... 30 表 2-5 波浪溯升高度經驗公式中的建議參數 ... 34 表 3-1 經資料融合修正前後與實測值之誤差 ... 37 表 3-2 修正前後的灘線位置與實測地形之比較 ... 38 表 3-3 各影像拍攝時間及其所對應之波浪資料 ... 42 表 3-4 由影像擷取結構物及灘線與實測地形資料的比較 ... 43 表 3-5 以不同溯升公式與底床平均坡度修正灘線的 RMS ... 54符號說明
Gamma 影像強化函數曲率調整參數 Hight_in 影像強化函數輸入影像亮度值之高門檻值 High_out 影像強化函數輸出影像亮度值之高門檻值 Low_in 影像強化函數輸入影像亮度值之低門檻值 Low_out 影像強化函數輸出影像亮度值之低門檻值NDVI 常態化植生指數(normalize difference vegetation index)
NIR 近紅外光
R 紅光譜
RMS 均方根誤差(Root mean square of error)
c 累積機率函數 E 波浪能量 G 局部梯度 g 重力加速度 H 波高 H0 深海波高 Hmax 最大波高 H1/3 示性波高 hD 東石水位高 hB 箔仔寮水位高 hJ 將軍水位高 hP 澎湖水位高 hb 碎波水深 hi 水深 k 波速 L 波長 L0 深海波長 n 群波速度與波速之比值 p 機率密度函數 R2 迴歸模式的相關係數平方(R-square) Rmax 最大溯升高度 R2% 前 2%大之溯升高度 R1/10 前 1/10 平均溯升高度 R1/3 前 1/3 平均溯升高度 R 平均溯升高度 Sxx 正向入射波浪之輻射應力 s 底床坡度 T 直方圖等化轉換函數
T1/3 示性週期 ti 時間 V 灘線位置移動速度 zi 衛星影像中灘線位置 α 邊緣方向 底床坡度 Δ h 二維空間內插運算子 碎波帶內波高與水深比值 0 碎波相似參數 平均水位 b 碎波波高 max 平均水位抬升的最大值 ρ 海水密度
第一章 緒論
1-1 研究動機與目的
臺灣位於菲律賓板塊與歐亞板塊的交界處,除自然的板塊運動造 成東海岸上升及西海岸下降的現象,西海岸由於人口密集度高自然資 源如地下水、逕流水及砂石的採掘也較東海岸為劇烈,因此長期以來 臺灣西海岸皆面臨海岸侵蝕的問題。臺灣除沿海地區的平原地形外, 其於地形皆屬山脈,因此對寸土寸金的臺灣來說,海岸地區的資源開 發與利用更是相對重要,近年來國內無論是國家或業界都期望能夠有 效利用海岸資源,如麥寮工業區及東石海埔地的開發。受到潮流與季 節風浪的影響,海岸開發與建設首先面臨到的就是需要避免國土流失 的問題,在西海岸興建的港灣建設都相繼面臨突堤效應所帶來上游淤 積而下游侵蝕的窘況,例如新竹港南海岸、臺中港南側海堤及臺南安 平商港南側的黃金海岸。故海岸變遷的趨勢是工程開發前後所必頇考 量的重要因子,灘線的位置及其歷史變化趨勢可提供海岸防護、海岸 開發及灘線變遷數值模式率定做為重要參考(Hanson 等人, 1988)。 探討灘線的變化趨勢,必頇先釐清灘線位置,在往昔研究中,灘 線被定義為海水及陸地間的交界線(Horikawa, 1988)。往昔研究海灘地 形變化的方法包括數值模式、動床模型詴驗及現場調查。由現場調查 所觀測之地形雖然能呈現各種影響因素綜合變化的結果,非模型詴驗 或數值模式簡化條件下所能完整描述的,因此現場調查方法喜被人使 用,然而,現場調查的一些技術問題及現場調查高經費的困擾也是降 低實際執行可行性的因素。如實測的海灘地形極不規則,即使有現場 調查地形資料,但可能難以直接單純分析出來的結果,瞭解其變化特 性及預測未來的變化情形。海岸變遷或地形變化現象可直接由灘線隨 時間的變化來瞭解。因此若有大量的灘線資料,再輔以數理方法,分 析灘線的變化特性,即可進一步瞭解海灘地形變化特性。對於臺灣海 灘線變遷的監測,往昔使用人力由傳統的測量方法定位及量測高程, 不僅費時、費力,而且測量經費亦高。傳統以人力的量測方式在短時 間內量測大區域的海岸線亦有所困難,此外潮污及波浪在測量期內可 能造成海岸線的改變,所以其結果難以代表當時灘線的位置,此問題對於後續的海岸地形變遷的分析與研究會造成困難。為要解決上述量 測灘線位置之高經費及潮污與波浪的影響問題,利用新科技的衛星影 像來擷取灘線是一種新嘗詴的解決方法。以衛星影像擷取灘線經濟且 省時,並可獲得更多海岸線資料來進行海岸變遷分析。
1-2 研究方法與步驟
呂(2004)以涵蓋範圍大但空間解析度差的 SPOT 衛星影像利用區 域成長趨近法進行澎湖及東沙島地區的海岸線與面積的遙測分析,在 忽略潮位影響後的遙感偵測結果其平均誤差達 10%以下。何和陳 (2003)選用較接近平均潮位時刻所拍攝的衛星影像來偵測外傘頂洲 的乾沙洲面積,但品質較好的衛星影像很難正好在平均潮位時刻擷 取,故往昔所定位之海岸線容易受到影像拍攝時潮位不同所造成的影 響。若要將衛星影像監測灘線的技術應用於工程上,必頇提升其可靠 性,故本研究對近岸水位變化發展灘線的修正方法。 本研究希望選擇影像精度較高的 SPOT5 以及 FORMOSAT-2 影 像,單位面積的空間解析度相較於 SPOT1~4 可達往昔的二至四倍, 即可能夠進行更小範圍工程基地的影像分析與監測。另外針對影像拍 攝時潮位不同而使得灘線位置造成誤差的問題,本研究提出將灘線修 正至平均潮位的方法,能夠使不同時間所拍攝的衛星影像以同樣的基 準來進行灘線變遷的分析與比較。為探討潮位對於衛星影像擷取灘線 的影響,本研究以臺灣本島最大之淺灘沙洲外傘頂洲作為研究基地, 其長度約達二十公里。此砂洲為雲林嘉義海岸地區之天然屏障,防止 外海波浪對海岸之直接衝擊影響,減少災害之發生。因此外傘頂洲是 否有逐漸縮小或者陸化現象是值得研究的。 由於外傘頂洲屬於無人且未開發之離岸沙洲,故其潮位資料不 易取得,若要以調和分析法或正交潮法來進行估算均需實測潮污資料 方能分析其分潮特性,在無測站時就缺少潮污資料,因此便無法利用 上述二種方法解析而瞭解潮污特性。 在無潮位站而無資料的問題上,往昔研究方法可利用潮污模擬 (tide simulation)來克服。潮污推算模式主要分為三類:(1)經驗模式;(2)水動力模式;(3)資料同化模式等。經驗模式一般需要仰賴大量的 實測資料來進行建立,但即使是目前精度最高的衛星測高資料,也仍 由於其衛星行進軌道而存在著空間資料分布不夠密的問題。水動力模 式也隨著目前數值運算的能力提升而顯得更方便使用,但由於大範圍 的底床地形資料收集不易,以及較難界定底床摩擦以及黏滯性的參數 等缺點,常會影響近岸處的潮位推算。除了以上兩種方法外,資料同 化模式則是目前最被期待的方法,綜合前兩種方法的優點並改善其缺 點。用水動力學解決了經驗模式的空間解析度問題;而用實測潮位資 料彌補水動力學的底床資訊不足的缺點。另外透過資料的分析,水動 力學也可視為一有效的資料過濾器,可以修正不當的實測資料。 NAO.99b 即 是 上 述 的 資 料 同 化 模 式 , 透 過 水 動 力 模 式 配 合 TOPEX/POSEIDON 五年的衛星測高資料進行了 16 個短週期分潮 (M2, S2, N2, K2, 2N2, μ2, ν 2, L2, T2, K1, O1, P1, Q1, M1, OO1, 以及 J1)的 同化,並考慮章動(free core nutation resonance effect)以及太陽熱輻射 (solar radiational effect)等效應的修正,才擁有目前全球潮位推算的能 力 (Matsumoto 等人,2000) 。故本研究選用 NAO.99b 潮位模式來進 行估算。本研究在 NAO.99b 的推算結果中發現在東部海岸的潮位推 估相當準確,但在西南以及西部海岸近岸處有較大的誤差。本研究提 出一個空間上的潮位內插法,利用 NAO.99b 潮位模式與實測潮位站 的潮位資料來進行網格化以及內插,以全臺灣西岸與東岸共 15 個潮 位測站進行測詴可有效改善在臺灣西岸雲林地區 NAO.99b 的誤差。 此外在東部以及西南沿海也用此內插法進行測詴,發現也有很好的結 果。本方法可用來推估往昔無實測潮位站地點的潮位高度,亦可用來 進行潮位資料的補遺。 在研究外傘頂洲灘線變化問題上,利用 NAO.99b 的潮位估算模 式對外傘頂洲衛星影像中的灘線位置進行修正,修正後雖降低潮位變 化帶來的影響,但與實測地形資料比較的結果仍顯示有相當大的誤 差。在後續的研究中,我們發現產生此誤差的原因可能有二,一是衛 星影像拍攝時現場波高較高,在碎波帶之後會產生所謂的波浪溯升 (run-up)以及水平面抬升(set-up)的現象使得灘線位置較原來後退,另 一則是研究基地潮位估算上的錯誤。
在波浪溯升修正上,本文於安平漁港與商港間的沙灘進行了測 詴,以 Kobayashi(1990)所提出的經驗公式配合 Coastal Engineering Manual(CEM)中的波浪變形圖推求彎月型海灘各處的等值波高來進 行溯升高度的計算並應用於灘線位置的修正上。但在安平漁港與商港 間的研究基地範圍較小,波浪條件亦受到馬刺型突堤的影響產生繞射 的現象,因此本研究以臺中港北側淤沙區為研究基地進行波浪溯升以 及平均水位抬升的修正,並測詴往昔波浪溯升估算公式的適用性。 另外本研究經由在臺灣各研究基地(新竹港南海岸、外傘頂洲、 臺南安平商港與漁港間沙灘、以及臺中港北堤的淤沙區等)的實際應 用後提出一完整的流程,在底床坡度未知的情況下,透過一疊代的方 式以三幅衛星影像對應的示性波高、示性週期、以及潮位高成功對三 幅影像中的海岸線位置進行修正,其結果可供未來工程規畫或評估時 使用,詳述於 2-5 節。
1-3 文獻回顧
以 衛 星 影 像 監 測 灘 線 的 新 技 術 在 國 内 外 逐 漸 被 提 出 , 如 Kurosawa 等人(2001)、Ryu 等人(2008)及 Gilvear 等人(2004),其結果 皆顯示高空間解析度的衛星影像在地理資訊學以及河口與海岸調查 上有所幫助,並在未來具有很大的發展性。Gardel 與 Gratiot (2005) 利 用 SPOT 與 Landsat 衛星影像發展出一套監測含泥沙洲變遷的方法。 Ryu 等人(2002) 指出利用多頻譜影像中的熱紅外光(Thermal-Infrared Rays) 、 近 紅 外 光 (Near-Infrared Rays) 及 短 波 紅 外 光 (Short-Wave Infrared Rays)的組合可以在退潮時提升衛星影像擷取灘線的成效,可 降低近紅外光在混濁的水分中會被吸收而無法感測的情況。另外陳與 徐(1998)利用 SPOT 衛星影像中所萃取的海岸線位置與人工數化之成 果即時記野外 GPS 量測海岸線位置作比對,其結果顯示雨人工數化 成果之差異像元數為 2.48%,而與野外 GPS 量測的位置差距在 1~2 像元間。 Gardel 與 Gratiot (2005) 指出若要以不同時間的衛星影像做比較 時,需考慮取得影像拍攝時的潮位及其平均潮位處的底床坡度。吳等人(2003)利用許多不同時間的遙測資料分析臺灣西海岸的變遷臺。 Boak 與 Turner(2005)指出,由於水位會隨著潮污或波浪影響,灘線 的位置會隨時間不同而有變化,若直接採用瞬時擷取出來的灘線位置 來做分析並非適當的。呂(2004)以 SPOT 衛星影像利用區域成長趨近 法進行澎湖及東沙島地區的海岸線與面積的遙測分析,在忽略潮位影 響後的遙感偵測結果其平均誤差達 10%以下。何和陳(2003)選用較接 近平均潮位時刻所拍攝的衛星影像來偵測外傘頂洲的乾沙洲面積,但 品質較好的衛星影像很難正好在平均潮位時刻擷取,故往昔所定位之 海岸線容易受到影像拍攝時潮位不同所造成的影響。由以上文獻顯示 衛星影像拍攝時的潮位狀況不一,對於後續灘線變化的分析有很大的 影響,故本文在外傘頂洲灘線分析時提出一修正方法,詳述於 2-3 節。 由於外傘頂洲屬於無人且較未開發之離岸沙洲,故其潮位資料不 易取得,故需藉由潮位模式來進行估算。Darwin(1907)發展至今已近 百年,當潮位數據夠長,以調和分析法推算水位的精度頗高,因此常 被工程人員及科學家使用。調和分析法以級數表示潮污特性,並不和 實際天文潮勢(tide-generating potential)的振幅與位相相關連。Munk 和 Cartwright (1966)發展出 convolution 方法及納導函數(admittance function)觀念,把天文潮勢加於分析方法。Groves 和 Regnolds (1975) 提出正交 convolution 方法,推導出正交潮(orthotides)及其權重計算方 法,其分析結果並與四個測站資料比較,發現此種方法獲得的納導函 數相當連續而且能正確預測潮污。不管調和分析法或正交潮法均需實 測潮污資料方能分析其分潮特性,在無測站時,就缺少潮污資料,因 此便無法利用上述二種方法解析而瞭解潮污特性。因此,便有學者利 用空間分佈廣的人造衛星測高資料加上流體運動的力學模式,發展出 可預測任何空間一點及時間段的潮污特性,如 Cartwright 和 Ray (1990) 利用 Geosat 衛星測高資料,利用正交潮法分析出各分潮特性,並與 潮位站實測數據分析結果比較頗為一致。Matsumoto 等人(1995)利用 高度測量誤差約為 4.7 cm 的高精度的 TOPEX/POSEIDON (T/P)衛星 資料,配合 Schwiderski (1980)推導出的潮位運動的力學方程式發展出 可計算全球各主要分潮特性分佈的數值模式。Matsumoto 等人(2000) 發展全球潮污推算模式,稱之為 NAO.99b。該模式以 16 個主要分潮
以 TOPEX/POSEIDON 衛星五年的全球測高水位與 219 個近岸實測 水位資料,以 Schwiderski (1980)的潮污方程式為基礎,以正壓水動力 數值方法,進行全球潮污模式之建立與資料同化(assimilation)計算。 相較於 CSR4.0 和 GOT99.2b 模式,於淺水及深水區 NAO.99b 之誤 差皆最小。Hwang 和 Chen (2000)利用 ERS1、ERS2、T/P 等衛星資料 分析南海的海水位特徵。Matsumoto 等人(2000) 發展的潮位數值模式 雖然經過 219 個潮位站之實測資料混合 T/P 資料於模式中,然而此潮 位資料均位於日本及韓國沿岸。所以,Matsumoto 等人(2000)的模式 是否能適用於臺灣西岸因地形因素影響需要加以評估。張與黃 (2001) 以臺灣西岸三個不同潮型的潮污測站資料檢驗 Matsumoto 等人(2000) 之模式適用性,由結果發現 NAO.99b 潮污模式預測對近岸潮污具有 較均勻的誤差,而此誤差不會因為潮差大小有明顯的差別,且發現 NAO.99b 潮污模式具有與調和分析 9 個分潮的能力相當的預測能 力。在工程應用上 NAO.99b 潮污模式可在沒有實測潮污資料的狀況 下計算出潮位高低。 本研究透過衛星影像進行潮位的修正後發現除潮污變化的影響 外,影像拍攝時灘線的位置亦會由於現場波浪大小的不同而有所影 響。影響灘線位置的波浪效應主要為波浪溯升以及平均水位抬升,本 研究以 Kobayashi(1990)所提出的經驗公式及 Coastal Engineering Manual(1995)中提出的推算方法進行比較。
第二章 衛星影像的灘線擷取技巧及修正方法
本文根據衛星影像資料特性不同,首先提出擷取衛星影像的灘線 位置的方法及建立其流程。另外,因為各張衛星影像拍攝時的水位高 低不同,考慮水位變化將擷取原始灘線修正至平均水位處,以利後續 工程之應用。本研究所發展的研究方法主要包括:1.衛星影像的前置 處理;2.近岸潮位估算值之資料融合;3.考慮潮污變化將灘線修正至 平均水位處;4.考慮波浪變化將灘線修正至平均水位處等 4 個。各個 方法的研發皆為提升衛星影像資料於灘線辨識的正確性及工程應用 性,本研究並將這些方法應用至臺灣數個研究基地(新竹港南海岸、 外傘頂洲、臺南安平商港與漁港間沙灘、以及臺中港北堤的淤沙區 等)。2-1 衛星影像處理
2-1-1 影像資料來源 目前商用光學衛星影像逐漸提高空間解析度,從 1972 年有 80 公尺空間解析度的 Landsat-1 MSS,直到 1999 年 15 公尺空間解析度 的 Landsat-7 ETM+。1986 年起法國 SPOT-1 衛星有 20 公尺空間解析 度,直到 2003 年 SPOT-5 衛星提升至 2.5 公尺空間解析度。除上述衛 星外,尚有福爾摩沙衛星二號(FORMOSAT-2)以及美國的 IKONOS 與 Quickbird 衛星,影像已接近 1 公尺之空間解析度。因各衛星各有其 優缺點,在任務需求不同時,選擇適當的資料才能有效利用資源。本 研究中使用的衛星影像皆向中央大學太空遙測中心申購,主要以 SPOT 系列以及福爾摩沙衛星二號等光學衛星影像為主,以下簡述二 種衛星影像的特性。 (一)SPOT 衛星 本研究目的為探討各研究基地灘線變遷的影響,要使用較高空間 解析度的 SPOT-5 衛星的影像資料。相較於 SPOT 系列的其他衛星, SPOT-5 不但在多光譜影像資料上有較好的表現,在全色態的空間解析度可達 5m。SPOT-5 號衛星於 2002 年 5 月 4 日發射升空,除了 跟 SPOT-1 至 SPOT-3 一樣擁有單色態光學感測器、多光譜光學感測 器(紅光、綠光、近紅外光)之外,還有 SPOT-4 所搭載的短波紅外光 感測器(SWIR),使得多光譜影像資料中包含四個波段的影像資料。 此外,SPOT-5 搭載了兩組以上所提到的感測器,經由同時拍攝,再 經過影像融合處理可以提昇其空間解析度到 2.5 公尺,稱為超解像模 式(Supermode)影像,SPOT 系列衛星所提供的影像示如表 2-1。 對於較小範圍的海岸線監測,所選用 SPOT-5 所的超解像模式影 像空間解析度為 2.5m,即可達到可接受的準確度。本研究選用臺南 安平港北側馬刺型突堤興建前的 2003 年至今年 2006 年之間的 SOPT-5 的衛星影像,2004 年中有拍攝到研究基地的 SPOT-5 影像大 多含有較多的雲層干擾,而 2005 年八月至十月,SPOT-5 衛星由於行 經軌道的因素拍攝範圍並沒有涵蓋到本研究基地。為克服影像數量不 足之問題,本研究另選擇 8 幅超解像模式影像以及 8 幅多光譜影像進 行分析,及兩張 SPOT-4 以及一張 SPOT-2 影像進行測詴後,證實 SPOT-2 及 SPOT-4 的空間解析度並不適合探討本研究基地此類較小 範圍的海岸線變化。 表 2-1 SPOT 系列衛星資料的基本特性 衛星代號 感測器 光譜模式 空間解析度 SPOT-1~3 HRV 單色態(PAN) 10m 多光譜態(XS) 20m SPOT-4 HRV 單色態(M) 10m 多光譜態(XI) 20m SPOT-5 HRG 單色態(HM) 5m 超解像模式(THR) 2.5m 多光譜態(HI) 10m
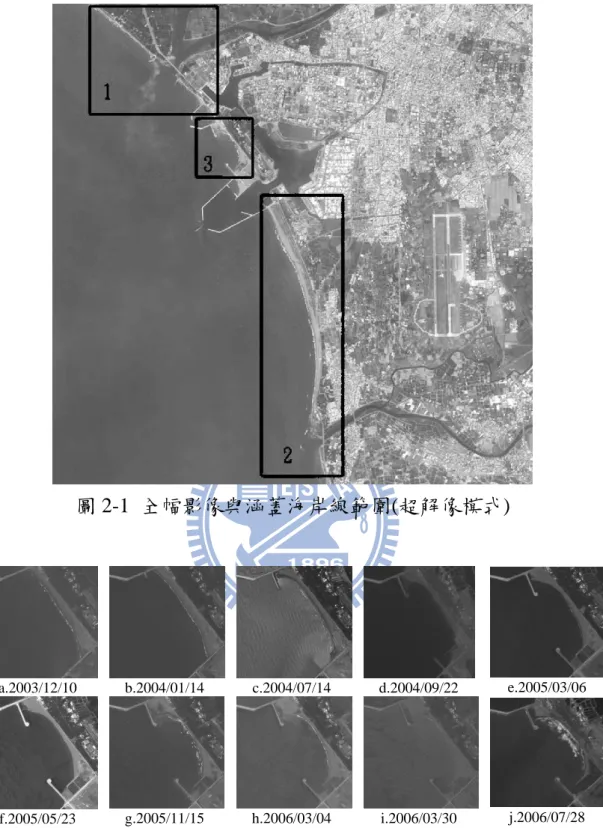
(二) 福爾摩沙衛星二號 福爾摩沙衛星二號(FORMOSAT-2) 於 2004 年 5 月 21 日成功發 射,為我國第一個自主性遙測計劃,是由國家實驗研究院國家太空中 心所主導,為國家太空計畫第一期十五年計畫中之主要任務之一。福 爾摩沙衛星二號具有資源探測與科學研究雙重任務,其資源探測任務 是以滿足臺灣地區之需求為主,其每日再訪率高與高空間解析度是福 爾摩沙衛星二號優於其他商業遙測衛星的地方。此衛星影像資料可應 用至土地利用與變遷、農林規劃、環境監控、災害評估以及科學研究 與 教 育 等 方 面 。 本 研 究 向 中 央 大 學 太 空 遙 測 中 心 申 購 的 FORMOSAT-2 影像已經系統改正以及精密幾何改正,其影像空間解 析度與感測器光譜模式列如表 2-2。多光譜態不同於 SPOT 系列衛星 的四個波段,即藍光段、綠光段、紅光段及近紅外光段。 表 2-2 FORMOSAT-2 衛星資料的基本特性 感測器 光譜模式 波段數 空間解析度 RSI 全色態(PAN) 1 2m 多光譜態(XS) 4 8m 2-1-2 影像的前置處理 本文先圈選出 SPOT5 超解像模式的影像中涵蓋研究基本的海岸 線範圍如圖 2-1 所示,圖 2-1 中的 3 個方框範圍分別為:1.鹽水溪出 海口至安平漁港北堤 2.安平漁港南堤至安平商港北堤間的養灘計畫 區 3.安平商港南堤至二仁溪出海口間的黃金海岸等三個區域。本研究 中以 2004 至 2006 年間實施養灘工程的區域 2 作為研究基地進行分 析。由於每張衛星影像圖因拍攝時的地表天候或天體相關位置不同而 具有不同的拍攝條件,如圖 2-2 所示的 10 張衛星影響圖。其中每張 衛星影像由於拍攝時光量以及氣候的不同,在單色態影像的亮度與對 比上會有明顯的差異,且因為地表天候以及天體相對位置的不同,其 差異程度也無法以簡單的線性調整來做標準化,因此需做影像的前置 處理,簡述如後。
圖 2-1 全幅影像與涵蓋海岸線範圍(超解像模式) a.2003/12/10 b.2004/01/14 c.2004/07/14 d.2004/09/22 e.2005/03/06 f.2005/05/23 g.2005/11/15 h.2006/03/04 i.2006/03/30 j.2006/07/28 圖 2-2 不同的拍攝條件下所拍攝的衛星影像 (一)直方圖的等化 圖 2-3 為圖 2-2 所示的 10 張衛星影像圖的亮度直方圖(Histogram) 分佈。數位影像的灰階亮度值介於 0~255 的整數,圖 2-3 中各張直方 圖的橫軸為亮度,而縱軸為影像某亮度出現的次數,直方圖為表示一
張灰階影像的強度分佈。由圖 2-3 顯示這 10 張亮度直方圖的分佈寬 幅雖接近,但峰值(peak)的位置卻有所差異,因此需對各影像先進行 直方圖的等化(Histogram Equalization),以提高其對比度來辨識出影 像中的差異處。以單色態的灰階影像為例,以 ni表示亮度 i 出現的次 數,如此一來在影像中亮度為 i 出現的機率為 1 ,..., 0 , ) ( i L n n i p i x (2-1) L 是影像中所有的亮度階數,n 是影像中所有的像素點,p 即為影像 的直方圖。而 c 則為對應於 p 的累積機率函數,定義為:
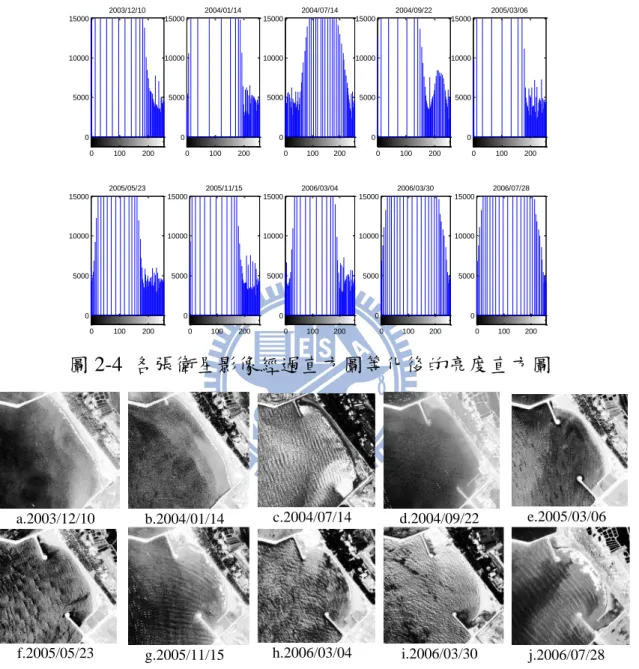
i j x j p i c 0 ) ( ) ( (2-2) 接著建立一個能夠產生新影像yT( x)的轉換函數 T,並要求每一個 x 影像的像素點皆對應一個 y 影像的像素點,因此,y 影像的累積機率 函數就可以在值域內進行線性映射,轉換函數 T 可定義為 ) ( ) (x c i T yi i (2-3) 經由以上轉換即可完成直方圖等化。 0 100 200 0 5000 10000 15000 2003/12/10 0 100 200 0 5000 10000 15000 2004/01/14 0 100 200 0 5000 10000 15000 2004/07/14 0 100 200 0 5000 10000 15000 2004/09/22 0 100 200 0 5000 10000 15000 2005/03/06 0 100 200 0 5000 10000 15000 2005/05/23 0 100 200 0 5000 10000 15000 2005/11/15 0 100 200 0 5000 10000 15000 2006/03/04 0 100 200 0 5000 10000 15000 2006/03/30 0 100 200 0 5000 10000 15000 2006/07/28 圖 2-3 衛星影像的亮度直方圖圖 2-2 經過直方圖等化處理後,將每張影像的亮度都均勻展開至 0~255 的亮度間,如圖 2-4 所示。此方法可使影像中各組亮度之間的 差異度提升,對於影像的分類以及邊緣的偵測上,可以較容易找出其 特徵門檻值。 0 100 200 0 5000 10000 15000 2003/12/10 0 100 200 0 5000 10000 15000 2004/01/14 0 100 200 0 5000 10000 15000 2004/07/14 0 100 200 0 5000 10000 15000 2004/09/22 0 100 200 0 5000 10000 15000 2005/03/06 0 100 200 0 5000 10000 15000 2005/05/23 0 100 200 0 5000 10000 15000 2005/11/15 0 100 200 0 5000 10000 15000 2006/03/04 0 100 200 0 5000 10000 15000 2006/03/30 0 100 200 0 5000 10000 15000 2006/07/28 圖 2-4 各張衛星影像經過直方圖等化後的亮度直方圖 a.2003/12/10 b.2004/01/14 c.2004/07/14 d.2004/09/22 e.2005/03/06 f.2005/05/23 g.2005/11/15 h.2006/03/04 i.2006/03/30 j.2006/07/28 圖 2-5 經過直方圖等化後的衛星影像 圖 2-5 為圖 2-2 各影像經直方圖等化將其亮度分佈範圍均勻展開 後的衛星影像。圖 2-5a、2-5b、2-5e、2-5f 皆因為直方圖等化而使海 水與沙灘間的亮度差異變大,但在圖 2-5g、2-5h、2-5i 中因為海水與 沙灘間的亮度差異度本來就不夠大,以致於直方圖等化所產生的效果 有限,在部分海陸交界處並沒有很明顯的亮度差異。而圖 2-5c 中則 是因為原始影像中海陸交界處有一明顯的含水沙灘段而使得在經過
直方圖等化後海水與沙灘的亮度表現上與其他圖有相反的現象。直方 圖等化能夠將影像中水域及陸域兩個亮度分佈峰直間的距離作些許 的展開,但針對不同的影像會有不同的效益。 (二)影像強化 由於直方圖均勻等化法並無法完全突顯部份影像的海陸交界,故 本研究採用影像強化來解決此問題。影像強化主要是利用一個映射函 數來轉換(mapping)原始影像中的某段強度值到新的輸出值域上,此 方法頇針對不同影像給予不同的強度輸入範圍、強度輸出範圍、以及 轉換函數曲率。三種基本的映射函數如圖 2-6 所示。在 low_in 以下、 high_in 以上的強度值將被忽略不處理直接映射到 low_out 以下與 high_out 以上。而 low_in 以上至 high_in 之間的強度值則需經過轉換 函數的處理再映射至 low_out 與 high_out 之間,轉換函數的曲率以 gamma 係數來控制,如果 gamma 小於 1,則映射出來的結果會較原 來的強度大(意即較亮),示如圖 2-6 左邊;反之,若 gamma 大於 1, 則映射出來的結果會較原來的強度小(較暗),如圖 2-6 右邊;若 gamma 值等於 1,則以線性映射進行轉換,如圖 2-6 中間。此方法若配合直 方圖等化即可忽略掉影像中非重點的亮度差異處,而強調出影像中的 重點差異處。 圖 2-6 影像強化中所使用的各式映射函數
a.2003/12/10 b.2004/01/14 c.2004/07/14 d.2004/09/22 e.2005/03/06 f.2005/05/23 g.2005/11/15 h.2006/03/04 i.2006/03/30 j.2006/07/28 圖 2-7 經由影像強化後的衛星影像 本研究將圖 2-5 再強化後的衛星影像圖如圖 2-7 所示。原本圖 2-5 中的海陸交界較不清楚之處,在相對應圖 2-7 中則變較清楚可辨,如 圖 2-5c 以及圖 2-5h 兩張圖海陸交界處不明顯的問題,圖 2-5c 因為在 灘線處有含水沙質,造成海面上亮度較陸地上大的問題,故在 low_out 以及 high_out 的參數設定上以 1、0 來作一個亮度分布的反相(inverse) 轉換。此外經過處理後的圖 2-7c 也成功去除海面上的波紋。圖 2-5i 經過影像強化後亦使得海面上的波紋較為淡化而突顯出海陸交界處 的邊界。 2-1-3 原始灘線的擷取方法 本研究主要從衛星影像中擷取出水陸交界之原始灘線。這種從影 像中將重要的主題或是範圍獨立出來的技巧,稱為影像分割。影像分 割主要有三種方法:一為區域成長法(Region growing method),利用 選取初始點並將初始點周邊相關的像素點(pixel)獨立出來,而周圍非 相近像素點則捨棄,若選取多個初始點即可順利在一影像中做到切割 的動作;第二種是邊界偵測法(Edge detection method),將影像中每個 像素點與周圍點的強度關係推算出梯度向量,再由每個像素點的梯度 向量去推估該點是否為邊界,最後將邊界獨立出來,即可獲得邊界與 區域等相關資料;第三種為臨界值法(threshold method),設定一亮度 臨界值,在影像強度直方圖中將影像中強度點分為兩區,將影像進行
二值化(binary)後會產生強度只有 0 與 1 的影像(僅有黑白兩色),其中 0 與 1 之間即為邊界。 在辨識海岸線的位置上,由於影像中的像素點除了代表海水與陸 地外還有許多結構物或是植物,不利使用區域成長法。故本研究嘗詴 選用邊界偵測以及臨界值法來進行分析。臨界值法為最簡單的演算 法,本文經過測詴臨界值法後發現圖 2-7a、2-7b、2-7e 以及圖 2-7f 可以明確擷取原始灘線,然而在圖 2-7c、2-7g、2-7h 以及圖 2-7i 的灘 線擷取上效果不好。此因這些影像在海陸交界處的強度差異仍然不夠 大,故不容易挑選出合適的臨界值。由於臨界值法只能適用於部分影 像,且圖 2-7 的全部影像可以利用邊界偵測法來進行分析,故本文最 後採用邊界偵測法作為灘線擷取的方法。 邊界偵測法有許多不同的演算方式,但由於本研究所探討的遙測 影像大多包含許多陸上與海上的細微特徵,例如陸地上的房屋與結構 物、及海上的水面波紋與碎波泡沫。為了能夠更有效率地避免不必要 的特徵被當作灘線進行擷取,本研究採用了 Canny 演算法來進行邊界 偵測。Canny 檢測器主要是經由一個特定標準差的高斯濾波器來進行 平滑化以降低雜訊,這個步驟對於海面上細小的波紋或是水花都有明 顯的濾除效果。再經由式(2-4)與式(2-5)計算出每個點的局部梯度 (gradient)
g
與邊緣方向(tangent)
2 2
12 ) , (x y Gx Gy g (2-4) ) / ( tan ) , ( 1 2 2 y x G G y x (2-5) 將每個點計算出梯度與方向後可以組成一個梯度的矩陣,在此矩 陣中可連結梯度較大的相鄰點,可形成一條山脊,並在山脊的頂端處 檢測各點的梯度方向,剔除不符合方向的點之後剩餘的點可連成線段 的即為邊界。本文所選擇 10 幅全色態影像經 Canny 法處理後示如圖 2-8 所示。a.2003/12/10 b.2004/01/14 c.2004/07/14 d.2004/09/22 e.2005/03/06 f.2005/05/23 g.2005/11/15 h.2006/03/04 i.2006/03/30 j.2006/03/30 圖 2-8 經由 Canny 檢測器邊緣偵測所得的二值影像 由圖 2-8 中可明顯看出由 Canny 檢測器所偵測的原始灘線位置, 其中圖 2-8a、2-8f、2-8g、2-8i 以及 2-8j 在原始灘線位置外仍有代表 碎波帶白泡沫的邊界線,及海上結構物、陸上結構物與樹林的邊界 線,此邊界線並非研究所需的,故需要刪除。本文使用 Arcview 應用 軟體將非海岸線部分的邊界線進行刪除,經過處理後 10 張影像的海 岸線部分示如圖 2-9。圖 2-9 中的原始灘線皆由許多像素點結合而成, 且為不連續的曲線。為了進行後續的灘線位置修正以及侵淤分析必頇 進行細線化(thinning)或骨架化(skeletonization)。以圖 2-9 為例本研究 以 x 方向 25m 之間隔進行細線化,而 y 方向考慮到衛星影像最高空 間解析度為 2.5m,故採用 2.5m 為間距自 y=8000 處向 y=7000 處進行 邊界點搜尋,以計算點中心半徑 10m 內出現最多邊界點的位置當作 灘線位置點。最後所得的結果代表本文所稱原始灘線位置,如圖 2-10 所示。 7800 8100 8400 8700 9000 9300 9600 X(m) 7000 7300 7600 7900 Y (m ) 20031210 20040114 20040714 20040922 20050306 20050523 20051115 20060304 20060330 20060728 圖 2-9 初步擷取衛星影像的灘線位置
7800 8100 8400 8700 9000 9300 9600 X(m) 7000 7300 7600 7900 Y (m ) 20031210 20040114 20040714 20040922 20050306 20050523 20051115 20060304 20060330 20060728 圖 2-10 細線化的原始灘線位置 2-1-4 多頻譜影像的處理 SPOT 衛星及 FORMOSAT-2 衛星均提供多頻譜的衛星影像,此 異於全色態影像。多頻譜影像並非只有黑與白之間的灰階資料層尚有 不同波段的頻譜資料,如 SPOT 衛星的多頻譜包括綠光段(XS1: 0.5
μm–0.59μm),紅光段(XS2:0.61μm–0.68μm)與近紅外光段
(XS3:0.79μm – 0.89μm)以及 SPOT-4 與 SPOT-5 所搭載的短波紅
外光(SWIR);而 FORMOSAT-2 的多光譜影像則是由藍光段 (0.45〜 0.52μm)、綠光段(0.52〜0.60μm)、紅光段(0.63〜0.69μm)以及近紅
外光波段(0.76〜0.90μm)所組成。雖然 FORMOSAT-2 衛星雖然沒有
穿透大氣較強的 SWIR,但 FORMOSAT-2 有紅、藍以及綠等可見光 波段,故較全色態影像能處理原本的可見光色彩,其結果示如圖 2-11。多頻譜影像雖然空間解析度不如全色態的灰階影像,但其多層 資料可提供更多的資訊來對影像進行辯識分析,且各層資料皆有其特 性,除了可見光是依不同介質而有顏色差異外,紅外光對於溫度敏 感,近紅外光能夠明顯的反應出水份的多寡,而短波紅外光對於大氣 較具有穿透力等特性。圖 2-11 FORMOSAT-2 多光譜影像的可見光所融合成的影像 本研究亦嘗詴以多頻譜影像來做灘線的第二種判讀方法。由於一 般影像處理流程中的邊界擷取法以及區域成長法皆僅能對單一層資 料 來 做 分 析 。 故 本 研 究 以 常 態 化 植 生 指 數 (normalize difference vegetation index, NDVI)當作一合成指標,用來將多個頻譜以一定的比 例做合併,NDVI 是往昔研究中常用來辨識空照圖或影像中的植物用 的指標,其定義為: NIR R NDVI NIR R (2-6) 其中 NIR 為近紅外光,R 為可見光中的紅光。 依式(2-6)中,將臺南安平海岸的多頻譜影像中的近紅外光以及紅 光合併成一層資料的 NDVI 結果如圖 2-12 所示。 a.2003/12/10 b.2004/01/14 c.2004/07/14 d.2004/09/22 e.2005/03/06 f.2005/05/23 g.2005/11/15 h.2006/03/04 i.2006/03/30 j.2006/03/30 圖 2-12 近紅外光以及紅光所組成臺南安平海岸的 NDVI 影像
經過 NDVI 轉換將近紅外光與紅光譜合併組成的灰階影像圖 2-12 可看出水陸交界處更為明顯,即使不經過直方圖等化或是影像強 化等技術,就可以明顯的辨識出灘線的位置。多頻譜影像雖然能夠透 過各頻譜間光學特性的不同,經過組合找出水陸交界處,但其空間解 析度仍不及全色態或是超解像模式的影像資料,故本研究僅利用多頻 譜影像進行以上邊界擷取的測詴,後續分析仍採用較高解析度的全色 態或超解像模式影像。 以上灘線擷取技術可分為前置處理及灘線定位個兩部分,針對其 應用與成果分別說明如下: 1.前置處理: 前置處理的部分包括直方圖等化及影像強化,這兩種方法都是為 了提高灘線位置的辨識度,雖然對於灘線擷取並不是必要的流程,但 對比度的提升以及局部亮度範圍間的強化不但可提高肉眼的可辨 度,對於灘線定位上對於臨界值法中的門檻值及 Canny 檢測器中係數 的決定都有很大的幫助。本研究所採用的直方圖等化是制式的亮度分 布展開,故其展開的均勻度會因原始影像的特性而有不同的成效。若 需要將直方圖展開成特定 的型態,可利用直方圖匹配 (Histogram matching)或直方圖指定(histogram specification)等方法。 2.灘線定位: 不同於前置處理的輔助功能,灘線定位直接影響到灘線位置的正 確性,本研究灘線擷取的過程中所會造成的誤差,皆為灘線定位所造 成。灘線定位部分包括邊界擷取以及細線化兩個階段,
2-2 潮位推估與資料融合
潮污主要是由地球與日月間的相對引力所造成,而呈現週期的起 伏變化。若能準確地掌握這種週期性的水位變化能夠有利於生態、航 運或是工程等的管理。潮位的測量一般皆以定點浮標式或固定式潮位 站來進行。一般潮位站的設置經費高,對於低開發的天然海岸或是離岸沙洲,難設置固定式的潮位站,且有維修保養上的困難,如外傘頂 洲。在工程設計規畫及科學研究上,平面的潮污資料或潮污特性均是 重要的,本文為解決未設潮位站但需高精度潮位的問題,提出潮污推 算之方法,並應用於臺灣沿岸海域。 近年來發展迅速的衛星遙測技術,在軌道精度控制的不斷提升後 已能準確地以雷達測高來測定海面水位,但由於衛星是以其所乘載的 高度計沿著其移動軌道方向進行量測,無法進行定點的水位監測,且 軌道之外的區域亦無法進行量測。針對於這種情況就必頇透過潮位模 式來進行估算。 往昔利用潮位測站實際量測水位,以瞭解水位高低,再利用調和 分析法(harmonic analysis method)探討組合潮位的各分潮的特性。調和 分析法始自 Darwin(1907)發展至今已近百年,當潮位數據夠長(一般 為一年以上),以調和分析法推算水位的精度頗高,因此常被工程人 員及科學家使用。調和分析法以級數表示潮污特性,並不和實際天文 潮勢(tide-generating potential)的振幅與位相相關連。然而,當潮污資 料長度不夠,或者資料品質不佳,以調和分析法獲得的分潮特性便有 相當的誤差。Munk 和 Cartwright (1966)發展出 convolution 方法及納 導函數(admittance function)觀念,把天文潮勢加於分析方法。Groves 和 Regnolds (1975) 提 出 正 交 convolution 方 法 , 推 導 出 正 交 潮 (orthotides)及其權重計算方法,其分析結果並與四個測站資料比較, 發現此種方法獲得的納導函數相當連續而且能正確預測潮污。正交潮 法便逐漸被人利用來預測潮污。 不管調和分析法或正交潮法均需實測潮污資料方能分析其分潮 特性,若在無潮污測站時,就缺少潮污資料以上述二種方法解析之而 瞭解此區域潮污特性。因此,便有學者利用空間分佈廣的人造衛星測 高資料加上流體運動的力學模式,發展出可預測任何空間一點及時間 段的潮污特性,如 Cartwright 和 Ray (1990)利用 Geosat 衛星測高資 料,利用正交潮法分析出各分潮特性,並與潮位站實測數據分析結果 比較頗為一致。Matsumoto 等人(1995)利用高度測量誤差約為 4.7 cm 的高精度的 TOPEX/POSEIDON (T/P)衛星資料,配合 Schwiderski
(1980)推導出的潮位運動的力學方程式發展出可計算全球各主要分 潮特性分佈的數值模式。 Matsumoto 等人(2000) 發展全球潮污推算之 NAO.99b 模式。該 模式以 16 個主要分潮配合 TOPEX/POSEIDON 衛星五年的全球測 高水位與 219 個近岸實測水位資料,潮污數值模擬以 Schwiderski (1980)的潮污方程式為基礎,計算全球潮污配合資料同化(assimilation) 進 行 之 。 相 較 於 CSR4.0 和 GOT99.2b 模 式 , 於 淺 水 及 深 水 區 NAO.99b 之誤差皆最小。Hwang 和 Chen (2000)利用 ERS1、ERS2、 T/P 等衛星資料分析南海的海水位特徵。Matsumoto 等人(2000) 發展 的潮位數值模式雖然經過 219 個潮位站之實測資料混合 T/P 資料於模 式中,然而此潮位資料均位於日本及韓國沿岸。所以,Matsumoto 等 人(2000)的模式是否能適用於臺灣西岸因地形因素影響需要加以評 估。張與黃 (2001)以臺灣西岸三個不同潮型的潮污測站資料檢驗 Matsumoto 等人 (2000) 之模式 在 臺 灣潮污的 適用性,由結果發現 NAO.99b 潮污模式計算近岸潮污具有較均勻的誤差,而此誤差不會 因為潮差大小有明顯的差別,且發現 NAO.99b 潮污模式具有與調和 分析 9 個分潮的能力相當的預測能力。在工程應用上 NAO.99b 潮污 模 式 可 在 沒 有 實 測 潮 污 資 料 的 狀 況 下 計 算 出 潮 位 高 低 。 經 測 詴 NAO.99b 在鼻頭角、新竹與後壁湖等三個測站與實測水位比較的誤 差均方根(root mean square of error, RMS),分別為 13.4、15.8 及 10.1 cm。 本 研 究 以 臺 灣 西 岸 雲 林 嘉 義 一 帶 之 測 站 進 行 測 詴 時 發 現 NAO.99b 在臺灣西岸會產生較大的誤差,故對臺灣西部、西南海岸、 以及東部海岸進行資料的收集,並以 NAO.99b 進行潮位估算,探討 其 誤 差 發 生 的 成 因 後 提 出 一 種 簡 單 的 空 間 內 插 改 正 法 以 提 升 NAO.99b 在臺灣地區的適用性。未來 NAO.99b 在配合附近實測潮位 站的修正後,能在無實測潮位站的地點提供更準確的潮位推估。雖然 僅能對往昔資料進行修正或是補遺,但能夠提供衛星遙測資料更準確 的潮位資訊來做的比對或是修正(見張與陳,2005)。
本研究利用 NAO.99b 在臺灣地區西部、西南部、以及東部各潮 位站以 2004 年較完整的六個月資料進行測詴,NAO.99b 與實測潮位 站的誤差示如下表 2-3。 表 2-3 推算臺灣海岸地區各潮位站之誤差 西部海岸 西南海岸 東部海岸 測站 RMS (cm) 測站 RMS (cm) 測站 RMS (cm) 東石 42.55 高雄 11.55 石梯 11.97 箔仔寮 26.55 東港 15.79 成功 9.46 塭港 38.35 小琉球 13.20 富岡 10.14 澎湖 14.18 蟳廣嘴 12.87 綠島 9.59 將軍 12.83 大武 8.43 蘭嶼 19.01 由以上測詴結果可發現 NAO.99b 推算臺灣各海岸的潮位會由於 不同區域有不同的準確度,其中以東部海岸的推算結果最佳,平均 RMS 為 11.43 cm;西南海岸的平均 RMS 為 13.35 cm;而西部海岸平 均則為 26.89 cm,並以東石(42.55 cm)與塭港(38.35 cm)為最差。此現 象說明 NAO.99b 在臺灣西岸的臺灣海峽區域的預測能力較差。尤其 以近岸的東石以及塭港等站。圖 2-13 為東石測站 NAO.99b 推算潮位 高與實測資料比較圖。圖中可發現 NAO.99b 推算的潮位高與實測資 料的相位吻合,但在高低潮處皆有高潮位過高低潮位過低的狀況,這 是發生在東石以及塭港的主要誤差。 臺灣地區位於西太平洋邊緣處,為一鄰近歐亞大陸的海島地形, 在西側與歐亞大陸間形成一條狹長水道-臺灣海峽。由於海峽地形造 成一束縮效應使得臺灣西側的潮流與潮位變化較為複雜。圖 2-13 中 高低潮處的誤差應是由於海水受日月引力由深海至近岸的地形變化 所造成的 M2分潮能量消散。近年來由於 TOPEX/POSEIDON 等衛星 的科技進步,使潮污模式的精度又更加提高,其 M2分潮在深海處(水 深>1000 m)的 RMS 已達 0.97 cm,但淺海處(水深<1000 m)則約為 9.78 cm。
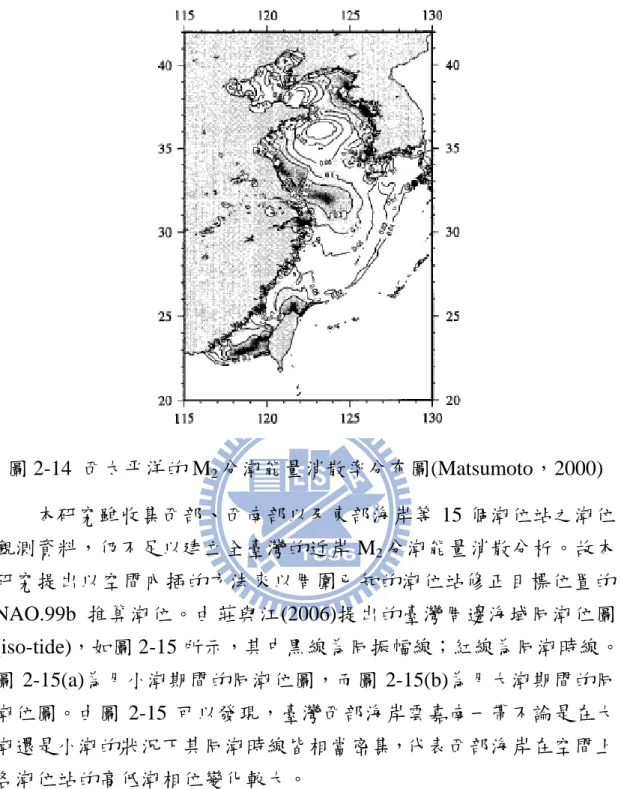
Matsumoto 等人(2000)所提及的 M2分潮能量消散率分布圖(如圖 2-14)顯示臺灣地區有兩處海域有較大的 M2分潮能量消散率,分別在 北部基隆近岸海域以及西部雲林嘉義一帶延伸至臺灣海峽中間。Zu 等人(2008)以數值模擬中國南海海域潮污狀況時也提到臺灣海峽有 發生強烈的 M2分潮能量消散情況。為解決此誤差,Matsumoto 等人 (2000)提出了 NAO.99Jb,將日本以及韓國兩地共 219 個潮位站的資 料與 NAO.99b 作資料同化,以改善近岸的潮位誤差。 0 50 100 150 Time(hour) -200 -100 0 100 200 T id al H ei g h t( cm ) NAO.99b Observed Data 圖 2-13 NAO.99b 推算東石測站潮位與實測值的比較
圖 2-14 西太平洋的 M2分潮能量消散率分布圖(Matsumoto,2000) 本研究雖收集西部、西南部以及東部海岸等 15 個潮位站之潮位 觀測資料,仍不足以建立全臺灣的近岸 M2分潮能量消散分析。故本 研究提出以空間內插的方法來以周圍已知的潮位站修正目標位置的 NAO.99b 推算潮位。由莊與江(2006)提出的臺灣周邊海域同潮位圖 (iso-tide),如圖 2-15 所示,其中黑線為同振幅線;紅線為同潮時線。 圖 2-15(a)為月小潮期間的同潮位圖,而圖 2-15(b)為月大潮期間的同 潮位圖。由圖 2-15 可以發現,臺灣西部海岸雲嘉南一帶不論是在大 潮還是小潮的狀況下其同潮時線皆相當密集,代表西部海岸在空間上 各潮位站的高低潮相位變化較大。
(a)小潮情況 (b)大潮情況 圖 2-15 臺灣四周海域同潮位圖(莊與江,2006) 臺灣以峽溝狀之臺灣海峽與大陸間隔,潮波自太平洋向亞洲大陸 沿海傳播時,因地形影響而自臺灣海峽南北開口進入,並於海峽中部 交會,形成潮污有不同的漲落。漲潮時潮波進入臺灣海峽並因海峽寬 度束縮而壅昇,退潮時反向自南、北開口流出,形成臺灣中西部海岸
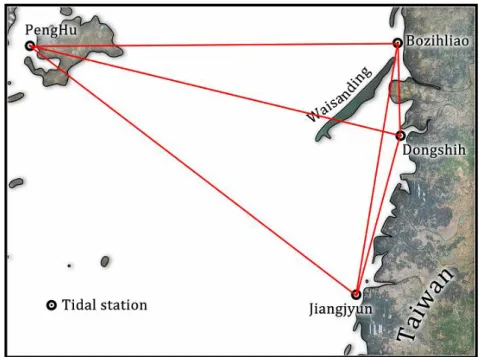
的潮差高於南、北兩端的現象。此外,臺灣各地潮型也有很大的差異, 有全日潮、半日潮以及混合潮等不同潮型(郭,2001)。綜合考慮以上 潮時相位、潮差、以及潮型三點的空間變化,不宜直接對各潮位站的 水位進行空間內插。本研究保留 NAO.99b 原本水動力模式的特性, 以其推算結果與各潮位站實測值的差異量進行空間內插,意即考量空 間上各周邊潮位站 NAO.99b 與實測資料間的差值來內插需修正的地 點的修正量。本文以箔子寮、澎湖、將軍等測站內插並修正東石測站 的潮位資料為例,示意圖如圖 2-16。圖 2-16 中圓形符號表示實測潮 位站,我們選定東石(Dongshih)測站周邊的箔仔寮(Bozihliao)、澎湖 (PengHu)、以及將軍(Jiangjyng)測站來對 NAO.99b 所推算出來的潮位 高進行修正。 ) , , ( n P o P n J o J n B o B n D D h h h h h h h h h (2-7) 其中 h 為潮位高,其上標 n 代表為 NAO.99b 所推算的結果;上標 o 代表為潮位站實測數據,下標則為地點,東石縮寫為 D、箔仔寮縮寫 為 B、澎湖縮寫為 P、以及將軍縮寫為 J。式(2-7)中h運算子代表二 維空間內插,以箔仔寮、澎湖以及將軍等三測站其 NAO.99b 與實測 資料的差值進行空間內插,利用 Delaunay Triangulation 在範圍內產生 三角網格,並以 Cubic spline 法內插出東石測站的差值,再修正東石 測 站 的 NAO.99b 推 算 結 果 , 此 修 正 法 雖 類 似 資 料 同 化 (Data assimilation),但與 Matsumoto 等人(2000)所採用的比例式分潮調整有 所不同,本文稱為潮位資料融合法(Data blending method)。
圖 2-16 潮位的空間內插示意圖(以東石測站為例)
2-3 考慮潮位變化之灘線修正
海岸防護設施前的沙灘及潮間帶間寬度能消減波浪能量有緩衝 功效,海灘變化可視為海堤防護功效之重要指標,故歷年海岸線變遷 分析為重要分析項目之一。本文選擇一個無人工設施影響的自然海灘 外傘頂洲為例。外傘頂洲為臺灣本島最大之離岸砂洲,從雲林金湖村 沿海往南延伸到嘉義與臺南交界處,呈東北西南走向,長度約達 20 公里示如圖 2-17。此砂洲為雲林嘉義海岸地區之天然屏障,防止外海 波浪對海岸之直接衝擊影響,減少災害之發生。嘉義縣海岸一帶因受 其屏障保護得以擁有廣大的濕地可提供多種生物棲息或進行復育。但 是,因西北方向受到外海波浪的作用,且雲林一帶常年有地層下陷的 影響,外傘頂洲是否有逐漸縮小或者陸化現象是值得研究的。郭等人 (1997)提出外傘頂洲在東北季風及沿岸流帶動下,往西南方向延伸, 砂洲主體高程降低,砂洲內部之潟湖正在逐年淤淺,砂洲本身開始陸 化。本研究基地在外傘頂洲東方 14 公里處,因此評估外傘頂洲的歷 年地形調查資料進行侵淤比較分析,俾供後續防護方案及環境營造規 劃分析及佈設之依據。圖 2-17 外傘頂洲之地理位置圖 經過 2-1 節所提及的影像前置處理、邊界擷取以及細線化後即可 定位出衛星影像中的灘線位置,但由於外傘頂洲缺乏潮位實測資料且 其 南 北 兩 側 會 由 於 距 離 較 遠 而 有 潮 位 上 的 差 異 , 本 研 究 選 用 Matsumoto 等人(1995)所發展的 NAO.99b 模式進行潮位的估算及利 用 2-2 節所提出的資料融合法進行潮位的修正方法,以東石潮位站為 例,在修正前 NAO.99b 模式推估潮位在高低潮處約有 44cm 的誤差, 而若利用箔仔寮、澎湖以及將軍三個測站的資料進行融合後,其推算 誤差可降低至 10cm,故本研究將此技術運用於外傘頂洲的潮位估算 中,以推算更準確的結果。詳細比較臺灣的主要潮位站之潮位資料融 合結果可見第三章說明。
本文提出灘線平移修正法(one-line shift method, OSM)將不同潮 位擷取出衛星影像原始灘線平移至平均潮位上,即海岸工程所定義之 平均灘線位置,此方法詳述如下:
圖 2-18 三張不同時間衛星影像的潮位及海灘底床剖面示意圖 一般而言,在沖刷帶之底床地形坡度可視為均勻坡度(見 Komar, 1998; Silvester 與 Hsu, 1997),在時間 ti某剖面之平均坡度可定義如下 , s z x h i i i (i1,2,3) (2-8) 其中 zi為在平均水位情況下的灘線位置,xi是該 ti時間下衛星影像辨 識出的原始灘線位置,hi為 ti時間時的潮污水位,s 為底床平均坡度。 若假設在研究期間內之灘線變化相近,則定義灘線移動速度為 , ji ji i j i j t z t t z z V (i, j 1,2,3) (2-9) 由三張擷取出的原始灘線位置(x1,x2,x3)及由 2-2 節方法計算出相 對應的潮位(h1,h2,h3),利用式(2-8)及式(2-9),可獲得平均坡度為 21 21 32 2 3 21 21 32 2 3 x t t x h t t h s (2-10) 且可得平均潮位的灘線位置(z1,z2,z3)為 , 1 , 1 , , 1 , 1 1 , 1 , , 1 , 1 i i i i i i i i i i i i i i i i i i i x t t x h t t h h x z (i1,2,3) (2-11)
2-4 已知底床坡度情況下考慮波浪溯升與抬升之灘線修正
本研究挑選時間接近的三幅 SPOT 影像,採用 Coastal Engineering Manual(CEM) 中 平 均 水 位 抬 升 (wave set-up) 以 及 波 浪 溯 升 (wave run-up)的推算方式來作灘線位置的修正,在假設三幅 SPOT 影像其底 床坡度不變時,以簡單的潮位修正將影像中擷取灘線位置修正至平均 潮位,即可以三條海岸線的接近程度來決定合適的波浪溯升經驗公 式。 本研究選用臺中港北堤外的沙灘區作為研究基地,時間為 2003 年 9 月底至 10 月底間的三張衛星影像,此期間恰好無颱風侵臺,故 較能確保地形維持穩定,三張影像時間以及對應的海象資料如下表 2-4 所示,選用的影像時間分別為漲潮、退潮以及接近平均潮位的影 像,其潮位是以 Matsumoto(1995)所提出的 NAO.99b 潮位模式進行推 算;波高則以交通部運輸研究所港灣技術研究中心年報資料中的每小 時示性波高,其中 10 月 18 日以及 10 月 29 日的波高較為接近其值約 為 2.5m,此大波高會有明顯的波浪溯升以及平均水位抬升等的效應。 表 2-4 選擇臺中港衛星影像的時間與海象資料表 日期 波高(m) 週期(s) 潮位(cm) 2003/09/29 1.08 5 92.7 2003/10/18 2.84 5 -119.24 2003/10/29 2.29 5 -3 以 2-1 節所提出的直方圖等化、影像強化以及邊界擷取三個前置 處理來獲得衛星影像中的灘線位置。在波浪發展至近岸淺灘段時,若 波高相對於波長或水深達到某一極限,波浪會發生碎波現象。碎波發 生前、後,由於波浪輻射應力的變化,會導致平均水位發生下降及上 升現象,如圖 2-19 所示。在定常狀態(stationary)下,不考慮底床剪應 力時,x 方向的動量平衡方程式為
dx d h g dx dSxx (2-12) 上式表示波浪過剩動量 (excess momentum) 的變化與靜水壓力的變 化相平衡;其中, 為海水密度,g為重力加速度,h 為靜水水深(stillwater depth), 為平均水位,正向入射波浪之輻射應力,Sxx,由 Longuel-Higgins and Stewart (1964)推導得:
2 1 n 2 E Sxx (2-13) 其中 Egh2 8為波浪能量,n0.52khsinh2kh為群波速度 (group velocity)與波速(wave celerity)之比值,H 為波高,L 為波長,k2 L 為波速(wave number)。在碎波帶外,因h h,故 dx d gh dx dSxx (2-14) 將式(2-13)代入式(2-14)後並積分之,引用h時, 0之條 件,可得碎波帶外的平均水位變化為: kh 2 k H 8 1 2 sinh (2-15) 上式為負值,表示從外海至碎波點的平均水位低於靜水位,且逐漸下 降,此現象稱為平均水位下降 (wave set-down)。 但若在碎波帶內,波高與水深約成正比關係 Γ (見 Komar, 1998),若考慮含平均水位變化之水深,則
h H (2-16) 因碎波帶內之波浪為淺水波情況,故Sxx 3E/2,則式(2-12)成為:
dx d h g h g 16 3 dx d 2 2 (2-17) 將上式簡化可得 dx dh 8 3 8 3 1 dx d 2 2 (2-18)式(2-18)對 x 積分並引用碎波點條件,即hhb, b(下底標 b 表是碎波點的狀態)之條件,最後得
h h
x
3 8 1 1 x b 2 b / ) ( (2-19) 當 x=0 時,式(2-26)變為 b b s h 2 3 8 1 1 (2-20) 式(2-20)第一項為b為碎波點處降低的平均水位,第二項則為碎波帶 間水位抬升高度。而平均水位抬升的最大值為 x dx d s max (2-21) 若底床坡度為的的沙灘,平均水位抬升所造成海岸線後退的距離為 dx d x s tan (2-22) 上式表示碎波帶內之平均水位自碎波點起隨水深的遞減呈線性 升高,此現象稱為平均水位抬升。式(2-19)顯示當底床坡度均勻時, 碎波後之平均水位上升,係以線性增加。 圖 2-19 平均水位抬升示意圖此外,波浪碎波後向岸上傳遞亦會隨著底床坡度向上溯升,如圖 2-20 所示。直至最高點能量消散完成後即產生下刷(down-rush),此一 機制會在沙灘上留下明顯的乾濕沙地交界線如圖 2-21,此即為 2.1 節 中影像前置處理要擷取的邊界位置。 圖 2-20 波浪溯升示意圖 圖 2-21 乾濕沙地的交界線(左上部分為海面碎波帶,右下部分為沙 灘,中間白色箭頭標示處亮度較暗處即可看出濕沙地) Mase(1989)利用實驗資料提出不規則波在平直不透水沙灘上的 溯升高度經驗式,分別定義最大溯升高度(Rmax)、前 2%大之溯升高度 (R2%)、前 1/10 平均溯升高度(R1/10)、前 1/3 平均溯升高度(R1/3)、以及 平均溯升高度(R),其經驗式形式如式(2-23)所示,而對應各溯升高度 的參數則列於表 2-5。
b a H0 0 % R (2-23) 其中0為碎波相似參數 0 0 0 tan L H (2-24) 式(2-24)中 H0為深海波高,L0為深海波長,
β
為底床坡度之角 度。而 Kobayashi(1990)以數值模式推算不規則波於透水底床上溯升 高度,並提出經驗公式: 0 0 0 1 0.506 13 . 1 H R (2-25) 表 2-5 波浪溯升高度經驗公式中的建議參數 Rmax R2% R1/10 R1/3 R a 2.32 1.86 1.70 1.38 0.88 b 0.77 0.71 0.71 0.70 0.69 透過式(2-22)即可進行平均水位抬升的灘線修正,而波浪溯升的 灘線修正量則可透過式(2-23)及式(2-25)的溯升高度除以已知的底床 坡度來估算。以三幅影像中的灘線位置配合該時間點的波高週期資料 即可將灘線位置修正至沒有波浪變形作用下的灘線位置。再假設三幅 影像的期間底床地形為不變,即可以底床坡度配合潮位資料直接將三 條灘線修正至平均潮位處。 經修正後的三條灘線位置應為濾除波浪變形以及潮位變化的位 置,在三幅影像期間底床地形不變的假設下此三條灘線位置應為相 等,故本研究以三灘線的 RMS 平均當作修正方法的評估值。2-5 未知底床坡度情況下之灘線修正
上節所述方法為了決定最佳的底床坡度取樣方法以及最合適的 溯升經驗公式而採用實測地形資料來作為參考坡度。但在實際工程規 畫或是環境評估時不一定有合適的地形資料來進行底床坡度的決定。因此本研究再提出一流程,可在底床坡度未知的狀況下,僅利用 三幅影像擷取時的波高、週期、以及潮位高來對灘線作修正。 在對灘線進行波浪變形的修正時,必頇先假設一底床坡度,如此 即可針對各灘線進行波浪的修正。再以 2-3 節所提出的 one-line shift method (OSM)來將波浪修正後的灘線位置再度修正至平均潮位處,此 方法與上節直接假設地形不變的狀況不同,OSM 本身可考慮三幅影 像中均勻且穩定的地形變化來對受潮污影響的灘線位置做修正。此外 OSM 中可由潮位與灘線位置的相互關係求得如式(2-10)之底床坡 度。此坡度即可與波浪修正前所假設的坡度作比較,經過詴誤法的疊 代計算即可找到與假設底床坡度相近的結果,此結果即為最佳的底床 坡度,可進行正確可靠的波浪修正。 假設底床坡度β 擷取三幅不同時間 影像中的灘線位置 利用假設的β將三灘線 進行波浪變形的修正 以OSM修正潮污 所造成的灘線變化