1
實
實
務
務
專
專
題
題
報
報
告
告
書
書
3D 列印人形機器人製作
指 導 老 師:魏嘉延
專題製作學生:四技電子三甲 謝明哲 BQ105026
四技電子三甲 劉紹楷 BQ105033
四技電子三甲 賴永瑄 BQ105070
四技電子三甲 康育銘 BQ105004
修 平 科 技 大 學
電 子 工 程 系
DEPARTMENT OF ELECTRONIC ENGINEERING
HSIUPING UNIVERSITY OF SCIENCE AND
TECHNOLOGY
2
中華民國 一百零八 年 六月五日
摘要
近年來人工智慧機器人與機器人還有機械手臂的蓬勃發展,幫助了人 類進行一些危險和複雜繁瑣的工作而現今傳統產業與服務業也漸漸走向了 無人化生產,爾後機器人一定會在取代更多事物讓人類的生活更加便利吧。 本文的專題研究是本次使用 3D 列印製作機器人,並控制機器人讓它的動作 像真人一樣順暢流利。3
目錄
摘要---2
目錄--- 3
圖目錄--- 5
第一章
緒論
1-1 前言---7
1-2 研究動機---8
第二章 硬體設備簡介
2-1 人形機器人介紹---9
2-2 專題材料---10
2-2-1 3D 列印機---11
2-2-2 列印線材---12
2-2-3 馬達規格---14
2-2-4 電路板---16
2-2-5 電池---17
第三章 機器人製作過程
3-1 3D 列印機器人零件---18
4
3-2 零件裝設馬達---22
3-3 機器人零件組裝---24
3-4 電路板裝設---27
3-5 連接機器人 WIFI 程式---28
第四章 結論
4-1 成果與心得---31
4-2 參考文獻---32
5
圖目錄
圖 2-1 3D 列印機---11 圖 2-2 列印線材---13 圖 2-3 馬達規格---14 圖 2-4 電路板---16 圖 2-5 電池---17 圖 3-1 3D 列印軟體---18 圖 3-2 實體零件(1)---19 圖 3-3 實體零件(2)---19 圖 3-4 實體零件(3)---20 圖 3-5 實體零件(4)---20 圖 3-6 實體零件(5)---21 圖 3-7 實體零件(6)---21 圖 3-8 馬達組裝(1)---22 圖 3-9 馬達組裝(2)---22 圖 3-10 馬達組裝(3)---23 圖 3-11 馬達組裝(4)---236 圖 3-12 零件組裝(1)---24 圖 3-13 零件組裝(2)---25 圖 3-14 馬達校正---25 圖 3-16 組裝完成---26 圖 3-18 軟體 APP 程式---28 圖 3-19 軟體 APP(1)---29 圖 3-20 軟體 APP(2)---29 圖 3-21 軟體 APP(3)---30 圖 3-21 軟體 APP(4)---30
7
第一章 緒論
1-1 前言
機器人製造產業也就是所謂的無人工廠,是現在的趨勢也是未 來的走向,所以現在機器人被應用在許多地方不管是服務業還是生 產業,從產品製造到大型危險工程都漸漸被機器人所取代,這樣的 好處是將枯燥乏味或是危險的工作都給機器生產機器人本身不用休 息只要給予電力便可以工作,故障時馬上維修便可在上工,這樣就 可以大大的提高產能讓人類的生活過得更美好,至於在服務產業方 面就可以減少服務生的數目大大的減少人事成本,未來的趨勢一定 會往機器人這方面發展。8
1-2 研究動機
在這科技發達時代,不管是機器人或是人工智慧機器人都有了很大的 發展,加上在大二上課的時候因為課堂上接觸了 arduino 機器人,讓我們對 機器人產生了一些興趣,在大三的時候剛好有專題製作這個課程,所以我 們打算利用3D列印做出一隻簡易人形機器人並使用 WIFI 來連接操控機器 人,所以我們選擇了這項題目當作專題製作。9
第二章 硬體設備介紹
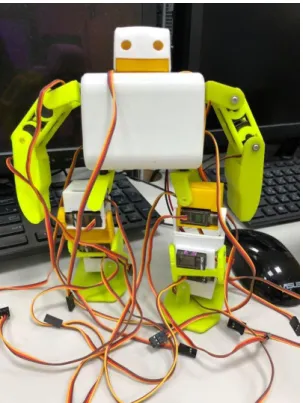
2-1 人形機器人介紹
人形機器人是一台開源的機器人,使用者不但能夠透過 3D 印表機列印 出零件,還可以自由修改外型與設計。人形機器人是組完整的機器人套件, 其中也包含了控制電路板、馬達以及所需的各式各樣配件,人形機器人的 高度大約為 20 公分,重量大約為 600 公克,體型相當嬌小,他擁有 18 個 關節,具有高度的可動性。 人形機器人很特別的地方是,它外殼的 3D 模型資料是免費提供的,使 用者可以直接使用 3D 印表機列印人形機器人的外殼,或是自行修改設計, 製作屬於自己的外殼,打造造型獨特的個人機器人。讓機器人擴充出更多 的功能。使用者可以使用智慧型手機、電腦等裝置控制人形機器人。10
2-2 專題材料表
表 2-1 人形機器人元件表 1. 3D 列印機 1 台 2. 3D 列印線材 1 捆 3. 馬達 MG90S 16 個 4. 電路板 1 個 5 電池 6.4V 2 個11
2-2-1 3D 列印機
3D 列印技術又稱為「加法製造」或是「積層製造」技術,目的是將您 所持有的 3D 圖檔,以高精度的堆疊方式呈現出原始模型的細節與特徵。3D 列印的技術很多,例如採用粉末為基礎的全彩 3D 列印技術、透過雷射加工 而成的金屬 3D 列印技術…等,馬路科技具備多種 3D 列印技術,能夠滿足 不同的客戶需求。 圖 2-1 3D 列印機12 原理: 1.透過電腦輔助設計或電腦動畫建模軟體建模 2.再將建成的三維模型「分割」成逐層的截面,從而指導印表機逐層列印。 3.接著印表機讀取檔案中的橫截面訊息。 4.再利用液體狀、粉狀或片狀的材料將這些截面逐層地列印出來。 5.最後將各層截面以各種方式粘合起來從而製造出一個實體。
2-2-2 列印線材
TPE 是一種熱塑性彈性體材質,成品如軟性橡膠,TPE 材料能製作可 彎曲且能夠回彈的零件,像是:墊圈、皮帶、彈簧、電話機殼等等更多。 靈活且彈性極佳的 3D 列印材料,讓您印製的 3D 列印成品非常軟 Q,不同 於常見的 ABS 以及 PLA。TPE 3D 列印材料 建議搭配近端送料 3D 列印機; 若使用遠端送料 3D 列印機,則需注意放慢速度並搭配 2.85mm 的線徑。13 特點: .彈性及柔軟、抗壓減震 .保存容易、良好的抗衝擊性 .較難列印、橋接性低 .噴頭可能較易堵塞 列印參數: 加熱平台溫度: 45-60°C (不一定需要加熱平台) 列印平台:需使用膠帶或 PEI 噴嘴溫度:225-245°C (推薦使用直接驅動擠出機) 需要部分冷卻風扇
14 圖 2-2 列印線材
2-2-3 馬達規格:MG90S:
圖 2-3 馬達規格 伺服馬達裡含有直流馬達、齒輪箱、軸柄、以及控制電路,我們可透過訊 號控制軸柄的停止角度,經由齒輪箱降速後,變成適當可用的轉速,並且 提供更高的轉矩(扭轉力)。 適用範圍:450 直升機斜盤舵機,小型機器人,機械手,船模型,車模型等15 產品尺寸:22.8*12.2*28.5mm; 產品重量:13.6g; 工作扭矩:2KG/cm ; 反應轉速:0.11 秒/60 度(4.8V) ; 使用溫度:0℃-55℃; 死區設定:5 微秒 ; 插頭類型:JR、FUTABA 通用; 轉動角度:最大 360/90 度 舵機類型:模擬舵機 接口規格:JR/FR 通用 使用電壓:4.8V; 結構材質:金屬銅齒、空心杯電機、雙滾珠軸承 連接線長度:300mm
16
2-2-4 使用的電路板:
圖 2-4 電路板 供電電壓:4.5V~6.4V,TTL 電壓:3.3V 引出管腳:3.3V,TXD RXD GND 平均電流:80mA;WiFi 數據發送時最大工作電流 3000mA WiFi 支援 AP STA AP+STA 三種模式17
2-2-5 電池規格
圖 2-5 電池 偉力 6.4V 1000mAh 18500 圓柱電池 T 插+SM 3P 雙插 #L959-A-04 規格:18500 電壓:6.4V 容量:1000mAh 尺寸:長 52*寬 36*厚 18(mm)18
第三章人形機器人製作過程
3-1 3D 列印機器人零件
首先先將機器人主體檔案帶入 Cura 軟體,接下來把大小.厚度.溫度.支撐 架...等等。的數值輸入便可開始列印 (圖 3-1 列印範例):20
圖 3-2 機器人的腳零件部位
21
圖 3-4 機器人的身體零件部位
22
圖 3-6 機器人手關節的零件部位
23
3-2 零件裝上馬達
圖 3-8 機器人腳關節裝上馬達
24
圖 3-10 機器人身體裝上馬達
25
3-3 機器人零件組裝
將機器人各部位零件與身體組裝在一起
26
圖 3-13 機器人手部零件
27
圖 3-15 一隻手一隻腳裝上身體
28
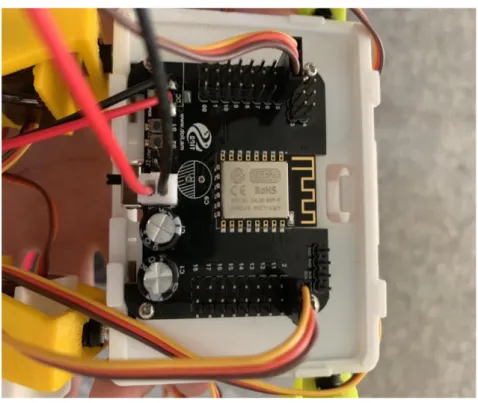
3-4 電路板裝設
圖 3-17 機器人上的電路板 整體尺寸:24mm x 16mm x 3mm 供電電壓:4.5V~6.4V TTL 電壓:3.3V
平均電流:80mA ;WiFi 數據發送時最大電壓 3000mA WiFi 支持 AP STA AP+STA 三種模式
29
3-5 連接機器人 WI FI 程式
圖 3-18 我們所使用的 WIFI 連接機器人程式
該應用程序支持 Android 設備和 iOS 設備,包括手機和平板電腦。
30
APP 內可以看到操縱跟調整機器人的頁面
圖 3-19 APP 頁面 1
31
左邊的框框內的圓形可自由滑動來操控移動機器人
圖 3-21 操縱介面 1
32
第四章結論
4-1 成果與心得
我們透過上面的步驟一步一步的達成最後完成了機器人,也順利讓機 器人跟手機的 WIFI 連接上讓機器人動了起來。 這次的專題製作途中,我們也遇到了不少的困難,例如機器人的零件列 印失敗,或是組裝時發現機器人的零件太大或是太小無法很順利的跟其它 關節連接上,又或是零件在組裝中斷裂,這都是我們一一要克服的,在最後 的 WIFI 操控機器人步驟,我們也要確認機器人的動作是否能夠正常行動,或 是其他部位是否在行動中會有怪異的樣子,通過這次的專題製作我們學到 了不少的知識,也了解到製作一隻機器人並不是那麼的簡單。33
4-2 參考文獻
[1].3D 列印人形機器人列印參考檔案網址: https://www.thingiverse.com/thing:3011158 [2].3D 列印人形機器人組裝參考網址: https://github.com/Nicholas3388/ViVi-Robot [3].3D 列印人形機器人 WIFI 連結程式參考網址 IOS 版本: https://itunes.apple.com/us/app/vivi-robot/id1255421040?l=zh&ls=1&mt=8 安卓版本: https://play.google.com/store/apps/details?id=jp.doit.scenography&hl=zh_CN [4].3D 列印參考軟體 Ultimaker Cura 3.4.1 安裝網址:https://ultimaker.com/en/products/ultimaker-cura-software [5].電池購買參考網址: https://tw.bid.yahoo.com/item/%E5%81%89%E5%8A%9B-6-4V-1000mAh-18 500%E5%9C%93%E6%9F%B1%E9%9B%BB%E6%B1%A0-T%E6%8F%92 -SM-3P%E9%9B%99%E6%8F%92-L95-10049798923034 [6].電路板購買參考網址: https://item.taobao.com/item.htm?ut_sk=1.XA2%2BP8dCMpoDAAh75WZf%2 BSNR_21380790_1559293263848.Copy.1&id=568013481287&sourceType=ite m&price=12-185&origin_price=%E7%BA%A6%20TWD%2055.29-852.32&su id=81C2BD6F-947E-43DC-A373-9FED15BD5DA6&un=567bf7d46f73801e16 24abb2e574152e&share_crt_v=1&sp_tk=77+lbEcxQ1kzVkZLUFfvv6U=&cpp =1&shareurl=true&spm=a313p.22.2m1.1037743333733&short_name=h.eeFYr Ry&sm=b3d14b&fbclid=IwAR13Pb9O6J20ZhnD3j2TEh3ss7vsruzFyHwBzXgi Wh5H_ldMV9fSPmKXu6Y&app=chrome [7].參考書籍: 超入門圖解智慧機器人 機器人製作聖經