國 立 交 通 大 學
光電工程研究所
碩士論文
鎖相式光彈調變穆勒矩陣偏光儀
Phase-lock PEM Mueller matrix Polarimetry
研 究 生:蔡 宗 翰
指 導 教 授:趙 于 飛 教授
鎖相式光彈調變穆勒矩陣偏光儀
Phase-lock PEM Mueller matrix Polarimetry
研 究 生:蔡宗翰 Student:Tsung-Han Tsai 指導教授:趙于飛 Advisor:Yu-Faye Chao 國 立 交 通 大 學 光電工程研究所 碩士論文 A Thesis
Submitted to Institute of Electro-Optical Engineering College of Electrical and Computer Engineering
National Chiao Tung University
In Partial Fulfillment of the Requirements For the Degree of
Master In
Electro-Optical Engineering July 2009
Hsinchu, Taiwan, Republic of China
鎖相式光彈調變穆勒矩陣偏光儀
學生:蔡宗翰 指導教授:趙于飛 教授 國立交通大學光電工程研究所 摘要 本系統結合了偏振態分析器與偏振態產生器,進行樣品穆勒矩陣 的單點量測。利用波形分析法鎖定光彈調變器調制下的特定時間相 位,本系統以特殊偏振態分析量測,相較於傳統的穆勒矩陣偏光儀, 不僅減少元件的旋轉次數,同時也降低旋轉元件造成的光束偏移現 象,並提升系統的量測速度。透過穆勒矩陣的分析,使我們可以得到 樣品詳細的偏光特性,並使得本系統得以量測各種非等向性材料,並 証明本系統具有拓展至二維量測的潛力。在本文中,我們透過空氣、 偏光片以及相位延遲片的穆勒矩陣的量測,以驗證本系統的量測能 力。由量測過程中光強度、量測系統以及各項待測參數的線性關係,Phase-lock PEM
Mueller matrix Polarimetry
Student:Tsung-Han Tsai Advisor:Prof. Yu-Fuye Chao
Institute of Electro-Optical Engineering National Chiao Tung University
Abstract
A phase-lock photoelastic modulated (PEM) polarimetry is used to measure the complete Mueller matrix of a sample. In the traditional rotating polarimetry, one has to utilize at least 15 mechanical rotations to complete the measurement, while in this PEM polarimetry we only require 7 rotations to achieve the same results. This technique not only reduces the measurement time, the beam deviation caused by rotation can also be diminished. In this work, we quantitatively estimate the errors of this PEM polarimetry by analyzing its measurement matrix. We find the optimal polarization state generator (PSG) and match the optimal polarization states analyzer (PSA) in this polarimetric system. In comparing the figure of merit of PSG and PSA with that of other configurations of polarimetry in the world, we proved that this PEM Mueller matrix polarimetry is a very competitive polarimetric technique. By acquiring the whole polarization proprieties of the sample, this polarimetry provides the potential for two-dimensional distribution of the optical anisotropic media by stroboscopic illumination technique.
致謝
我要感謝我的母親含辛茹苦的將我扶養長大,他的付出使我衣食 無虞,讓我能順利的陸續完成學業;教導我待人處世,使我學會與人 和睦相處;培養我樂觀的態度,使我有健康的心態面對並解決問題。 從求學至完成這篇論文的過程當中,有許多人我必須特別感謝, 沒有你們的幫助,我必然無法如此順利。首先,我必須要感謝趙老師 這數年間的教導,不論是在課堂上、參與國內外研討會時,或是研究 過程中的指導,都使我獲益良多。接著,我必須感謝修銘學長給我的 許多建議,使我能了解自己的不足,並且幫助我發掘出解決問題的能 力,還要感謝學長在撰寫過程中提供給我的寶貴意見,幫助我確立了 論文的方向以及架構。另外,我必須感謝冠毅在程式撰寫、繪圖以及 實驗儀器整合上給我的幫助,使我能順利的完成實驗。當然也必須要 感謝俊逸學長以及建智在平日與我的討論,這都使我受益匪淺。 最後,我要感謝純純這些日子的陪伴,帶給我歡笑、陪我度過困 難,以及在我最需要的時候激發我的靈感,沒有你我必定十分苦悶。目錄
鎖相式光彈調變穆勒矩陣偏光儀(摘要)
...iPhase-lock PEM Mueller matrix Polarimetry (Abstract)
..ii
致謝
...iii目錄
...iv圖目錄
...vii表目錄
...ix第一章 緒論...
1第二章 基本原理介紹
2.1 光波的電場與橢圓偏振態理論...6 2.2 光的偏振態表示法...102.2.1 瓊斯向量(Jones vector)與瓊斯矩陣(Jones matrix) ...10
2.2.2 史脫克參數(Stokes parameter) ...12 2.2.3 穆勒矩陣(Mueller matrix) ...15 2.2.4 龐加萊球面(Poincaré sphere) ...18 2.3 偏振態產生器(PSG)與偏振態分析器(PSA) ...20
第三章 鎖相式光彈調變穆勒矩陣偏光儀
3.1 文獻回顧-穆勒矩陣偏光儀...223.2 光彈調變器(photoelestic modulator)...32 3.3 實驗原理...35 3.3.1 閃頻式量測架構...35 3.3.2 波形分析法...37 3.4 儀器規格與實驗架構...39 3.5 實驗結果與偏光參數分析...43 3.5.1 量測空氣的穆勒矩陣...47 3.5.2 量測四分之一波片的穆勒矩陣...48 3.5.3 量測偏光片的穆勒矩陣...50
第四章 誤差分析與系統最佳化
...53 4.1 偏極光量測系統的線性關係...54 4.2 系統分析...56 4.2.1 透過行列式(determinant)與條件數(condition number)進行 PSG 的最佳化...584.2.2 透過等權重變異數(Equally weighted variance)進行 PSA 的 最佳化...61
4.3.3 樣本為四分之一波片的誤差分析...72
第五章 結論與未來展望
...74 參考文獻...85 附錄 A:透過光強度求得穆勒矩陣...87 附錄 B:空氣的穆勒矩陣誤差項...89 附錄 C:偏光片的穆勒矩陣誤差項...90 附錄 D:四分之一波片的穆勒矩陣誤差項...91圖目錄
圖 2-1:光波的傳播方向...6 圖 2-2:光的橢圓偏振態...8 圖 2-3:線性偏振光...9 圖 2-4:圓偏振光...9 圖 2-5:橢圓偏振光...9 圖 2-6:龐加萊球面...19 圖 2-7:偏極光量測系統...20 圖 3-1:RP/RA 系統...22 圖 3-2:RP/RCFA 系統...23 圖 3-3;FPRC/RCFA 系統...24 圖 3-4:PM/PM 系統...26 圖 3-5:PM/PM 系統 2...26 圖 3-6:DPM/DPM 系統...28 圖 3-7:PLD/PLD 系統...30 圖 3-8:PEM90 光彈調變器系統...32圖 3-12:鎖相式光彈調變穆勒矩陣偏光儀系統...40 圖 3-13:三亮度量測法系統...46 圖 4-1:常見的偏振態產生器(PSG) ...59 圖 4-2:常見的偏振態分析器(PSA) ...63 圖 4-3:本系統使用的偏振態分析器(PSA) ...64 圖 4-4:本系統使用的特殊偏振態在龐加萊球面上的位置...65 圖 4-5:空氣穆勒矩陣: x,四分之一波片的相位延遲量的偏差量; y ,PEM 時間相位的偏差量...69 圖 4-6:偏光片的穆勒矩陣:x,四分之一波片的相位延遲量的偏差量; y ,PEM 時間相位的偏量...70 圖 4-7:四分之一波片的穆勒矩陣: x,四分之一波片的相位延遲量的 偏差量;y ,PEM 時間相位的偏差量...72 圖 5-1:影像式穆勒矩陣偏光儀系統... ...82 圖 5-2:長葉九宮...82 圖 5-3:相位延遲量隨時間的變化情形 (左側為真正的相位延遲量, 右側則包含去偏極化效應的相位延遲量)...83
表目錄
表 2-1:不同偏振態的表示法...14 表 2-2:常見光學元件的穆勒矩陣...17 表 3-1:空氣的穆勒矩陣量測結果...47 表 3-2:四分之一波片的穆勒矩陣量測結果...48 表 3-3:偏光片(方位角 0°)的穆勒矩陣量測結果...50 表 3-4:偏光片(方位角 45°)的穆勒矩陣量測結果...51 表 4-1:常見 PSA 系統的 EWV 值...60 表 4-2:本系統的 EWV 值...60 表 4-3:常見 PSG 系統的行列式值與 2-norm 條件數的比較...63 表 4-4:本系統的行列式值與 2-norm 條件數...64 表 5-1:以偏振態的極分解分析空氣的量測結果...79 表 5-2:以偏振態的極分解分析四分之一波片的量測結果...80 表 A-1:光強度與元件的空間與時間相位...87第一章 緒論
橢圓偏光術(ellipsometry) 與一般光學量測最大的不同,在於偏 光術並非只是分析入射光與出射光間強度(intensity)的差異,而是藉由 分析入射光與出射光間偏振態(polarization state)的變化[1],來推算樣 品的光學特性,例如樣品的厚度、折射率以及反射率。由於偏光術具 有非破壞性以及豐富的資料性等量測特性,因此被廣泛的利用在非等 向性(anisotropic)材料各項光學性質的測量上。 利用橢圓偏光術進行光學量測需要透過下列 5 個步驟[2]:(1) 產生一組具有特定偏振態的入射光;(2)藉由穿透(transmission)、反 射(reflection)或是散射(scatting)使入射光的偏振態受到待測材料的影 響而改變;(3)分析出射光的偏振態;(4)分析量測系統中各項參數的 變化,以求得偏振態的改變量;(5)求得樣品的光學特性。透過前三 項步驟的改變,可以衍生出許多不同種類的量測方法,並針對特定或 是全部的光學特性加以量測。 依照量測中所使用儀器的不同,橢圓偏光術可以分為(1)歸零式 (null)、(2)亮度式(photometric)以及(3)偏光調變式(Polarization modulation)。歸零式是發展最早的橢圓偏光術,藉由改變偏光片 (polarizer)與析光片(analyzer)的方位角(azimuth angle),使得通過偏光片、樣品以及析光片的光強度達到最小,再分析各光學元件的方位角 以得到系統參數。這種量測方法的優點在於有最少的誤差來源[1], 因此可以達到最高的精確度,但是相較於其他的量測方法,歸零式需 要大量的時間在改變光學元件的方位角上,這也限制了其應用上的彈 性。亮度式橢圓偏光術是利用光偵測器(photo detector)或是電子耦合 偵測器CCD(Charge-Coupled Device)量測出射光的強度,藉由系統中 各項元件的方位角、相位延遲量(phase retardance)、樣品的旋轉、入 射角(angle of incidence)的改變等對出射光偏振態的影響,改變了出射 光的強度。藉由分析光強度的變化,並透過傅立葉分析(Fourier analysis)或是波形分析(Waveform analysis)以求得系統參數。然而系統 內各元件的旋轉不但會導致寄生誤差(parasitic error)[3]的產生,也直 接影響了此系統的精確度。偏光調變式利用相位調變器(phase modulator),在不轉動光學元件的情形之下調變入射光或是出射光的 偏振態,不但可以完全避免光學元件旋轉所造成的量測誤差,其極高 的調變頻率也可以增加量測的速度以及時間解析度(time resolution),如用高頻也可減少背景噪音,進而擴展了橢圓偏光術的
(polarization state analyzer,簡稱 PSA)量測出射光的偏振態,系統產 生入射的偏振態以及分析出射光偏振態的能力,決定了各項參數:包
括橢圓偏光參數Δ與Ψ、史脫克參數(Stokes parameter)以及穆勒矩陣
(Mueller matrix),是否能被量測。藉由合適的 PSG 以及 PSA 的搭配, 使系統具有能夠分析完整的穆勒矩陣的能力,則被稱為穆勒矩陣偏光 儀(Mueller matrix polarimetry)。穆勒矩陣偏光儀具有能以單一入射光 源分析非等向性(anisotropic)材料的各項光學性質的能力,藉著
Lu-Chipman 偏振態的極分解 (polar decomposition) 而被廣泛的應用
在散射性物質,例如生物組織的測量上。 本實驗室近年來致力於光彈調變器(Photoelestic Modulator,簡稱 PEM)在橢圓偏光術中的研究以及應用,並且發展出數種校正各元件 相對方位角的方法,已將光彈調變橢圓術(PEM ellipsometry)應用在一 維以及二維的薄膜光學特性的量測。2005 年韓建遠學長與李嘉倫學 長利用觸發脈波產生器對雷射二極體進行時間相位的調變,可以利用 四個特定時間相位下的光強度取得一組橢圓偏光參數Δ與Ψ,此項技 術被稱為閃頻式橢圓偏光儀[4]。藉由閃頻式橢圓儀選取PEM 特殊時 間相位的鎖相(phase-lock)技術,我們能在 PEM 所產生地連續偏振態 變化中,鎖定特殊的偏振態進行量測。此項技術可以應用在穆勒矩陣 偏光儀上,搭配合適的PSG 與 PSA,將光彈調變橢圓術的量測範圍
擴展到穆勒矩陣的量測。
本論文針對鎖相式光彈調變穆勒矩陣偏光儀(Phase-lock PEM Mueller matrix polarimetry)在單點量測的系統架設、系統最佳化以及 測量的精確度做探討,分為以下五個部份: 第一部份 基本原理介紹 介紹本論文中所使用到的物理以及數學原理,包括偏光量測的基 本原理以及如何描述光的偏振態。 第二部份 系統架構與實驗結果 首先透過文獻回顧比較各式穆勒矩陣偏光儀的優勢與劣勢,接著 介紹PEM 的光學特性,說明鎖相式光彈調變穆勒矩陣偏光儀的系統 組成與工作原理,並介紹分析穆勒矩陣的方法,最後以鎖相式光彈調 變穆勒矩陣偏光儀量測常見的光學元件,並分析各元件的偏光特性。 第三部份 誤差分析系統最佳化 以量測系統的線性關係模擬系統偏差對量測結果的影響,並由行 列式(determinant)、條件數(Condition number)以及等權重變異數 (Equally weight variance,簡稱 EWV)進行量測系統的最佳化,並分析
受到去偏極化效應(depolarization effect)的影響,最後展示二維量測的 初步結果。
第二章 基本原理介紹
2.1 光波的電場與橢圓偏振態理論
光波屬於電磁波中的特定頻率波段,當光波在空間傳播的時候, 電場會以隨機的方式震盪,會我們通常以電場在傳播中隨時間變化的 分布情形來描述光波的特性,這種特性又被稱為光的偏振態
(polarization state)。在 1818 年,Fresnal 與 Arago 以偏振態的理論來
分析Young 的干涉實驗,他們認為當光在傳播時,只存在的兩個互相 垂直的穿透分量(transmittance component),而縱向分量(longitudinal component )並不存在。 圖 2-1 光波的傳播方向 z Ex Ey 0
其中E0 x與E0 y代表最大振幅(amplitude),ω代表角頻率(angular
frequency),k則是波數(wave number),δx與δy則描述其相位(phase)。
將 (2.1) 以及 (2.2) 以三角函數展開可得
0
( , )
cos( ) cos sin( )sin
x x x x E z t t kz t kz E = ω − δ − ω − δ (2.3) 0 ( , )
cos( ) cos sin( )sin
y y y y E z t t kz t kz E = ω − δ − ω − δ (2.4) 接著將 (2.3) 與 (2.4) 合併為 0 0 ( , ) ( , )
sin y sin cos( )sin( )
x y x y x x y E z t E z t t kz E δ − E δ = ω − δ −δ (2.5) 0 0 ( , ) ( , )
cos y cos sin( )sin( )
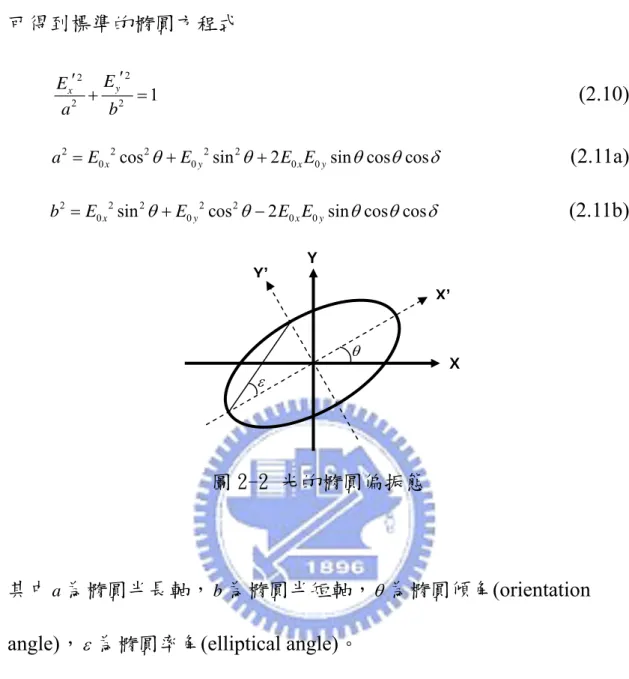
x y x y x x y E z t E z t t kz E δ − E δ = ω − δ −δ (2.6) 將 (2.5) 與 (2.6) 平方相加後可得當z=0時,電場的分布為 2 2 2 2 2 0 0 0 0 2 cos sin y y x x x y x y E E E E E +E − E E δ = δ (2.7) 其中δ 為δy−δx,表示兩垂直電場的相位差(phase difference)。 此方程式是一個橢圓方程式,由此可知在任意時間光波的電場的傳播 軌跡是一個橢圓,這種現象又稱為橢圓偏振(polarization ellipse)。 透過座標轉換,我們將 (2.7) 式化為一個標準的橢圓方程式,將 ( , )x y 座標旋轉θ角,轉換為( , )x y′ ′ 座標 cos sin x x y E =E ′ θ −E ′ θ (2.8) sin cos y x y E =E′ θ+E ′ θ (2.9)
可得到標準的橢圓方程式 2 2 2 2 1 y x E E a b ′ ′ + = (2.10) 2 2 2 2 2
0x cos 0y sin 2 0x 0ysin cos cos
a =E θ+E θ+ E E θ θ δ (2.11a)
2 2 2 2 2
0x sin 0y cos 2 0x 0ysin cos cos
b =E θ +E θ− E E θ θ δ (2.11b)
圖 2-2 光的橢圓偏振態
其中a為橢圓半長軸,b為橢圓半短軸,θ為橢圓傾角(orientation
angle),ε為橢圓率角(elliptical angle)。
當 (2.11) 式中的E0 x、E0 y以及δ 為特定值時,我們可以得到 特殊的橢圓偏振態,以下將介紹數種特例: (1)當δ =0或是δ π= 時,從 (2.10) 式中可以得到 0x E E = ± E (2.12) ε θ X Y X’ Y’
(2)當 2 π δ = ± ,且E0x =E0y =E0時,從 (2.10) 式中可以得到 2 2 2 2 0 0 1 y x E E E + E = (2.13)
此時電場的傳播軌跡為圓形,稱圓偏振光(circular polarized light)。 (3)當δ ≠0、δ π≠ 、
2
π
δ ≠ ± 時,電場傳播軌跡為一橢圓,稱為橢圓偏
振光(elliptical polarized light)。
圖 2-3 線性偏振光
圖 2-4 圓偏振光
2.2 光的偏振態表示法
2.2.1 瓊斯向量(Jones vector)與瓊斯矩陣(Jones matrix) 以平面波表示法可以將光波的電場表示為 0 ( , ) i x x x E z t =E eδ (2.14) 0 ( , ) i y y y E z t =E eδ (2.15) 我們將上兩式以 2 乘 1 的矩陣 E 表示,此行矩陣稱為瓊斯向量(Jones vector)。 0 0 x x i x x i y y E E e E E E e δ δ ⎡ ⎤ ⎡ ⎤ =⎢ ⎥= ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ (2.16) 在瓊斯向量中,E0 x與E0 y代表最大振幅,此兩項皆為實數。我們可以 透過瓊斯向量進行偏振光的運算。當偏振光 x y E E ⎡ ⎤ ⎢ ⎥ ⎣ ⎦透過一個偏光元件, 其出射的偏振態受到元件的影響,變成為 x y E E ⎡ ′⎤ ⎢ ⎥ ⎢ ′⎥ ⎣ ⎦ ,其線性關係可以透過 下列矩陣的運算式表示 x xx xy x yx yy y y E J J E J J E E ⎡ ′⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ =⎢ ⎥ ⎢ ⎥⋅ ⎢ ′⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (2.17) 或是
我們可以透過瓊斯矩陣來描述光學元件對於入射光以及出射光 偏振態之間的線性變換關係,因此各光學元件的瓊斯矩陣代表了其各 自的光學特性。但瓊斯向量只能描述純偏振光(pure polarized light)的 物理特性,在大部分的情況下,光訊號會透過光學元件和待測材料間 的多重反射或是散射,產生非偏振光(unpolarized light)或是部分偏振 光(partially polarized light)的情形,此時則必須透過史脫克向量(Stokes vector)來能完整表示光的偏振態。
2.2.2 史脫克參數(Stokes parameters) 瓊斯向量的限制以及在於其無法表示非偏振光或是部分偏振 光,這是個極為嚴重的問題,因為自然界的光大多不為純偏振光。1852 年史脫克(Stokes)將光的偏振態以定量的形式加以描述,此參數稱之 為史脫克參數(Stokes parameters)。史脫克參數的定義如下 2 2 0 0 0 2 2 1 0 0 2 0 0 2 0 0 2 cos 2 sin x y x y x y x y S E E S E E S E E S E E δ δ = + = − = = (2.19) 另外從史脫克參數之中,我們可以得到下列的關係 2 2 2 2 0 1 2 3 S =S +S +S (2.20) 這四項參數皆為實數,其中,第一項參數S0代表偏振光的總亮度,S1 描述了線性偏振光在水平以及鉛直方向的分量差,S2代表了線性偏振 光在+45°以及-45°的分量差,最後,S3代表了左旋以及右旋圓偏振光 的分量差。透過這四項史脫克參數,我們可以描述所有可能的偏振 光。我們也可以將史脫克參數以為 4 乘 1 的行矩陣表示,此矩陣稱為 史脫克向量 S S ⎡ ⎤
當產生部分偏振光時,史脫克參數會符合下列的關係 2 2 2 2 0 1 2 3 S ≥S +S +S (2.22) 上式中的等號只有在光波為純偏振光時才會成立。為了更精確的描述 光的偏振態,我們透過史脫克參數來判斷光的偏振程度,其定義如下 1 2 2 2 2 1 2 3 0 (S S S ) P S + + = ,0≤ ≤P 1 (2.23) 其中 P 值代表偏光率(degree of polarization ),當偏光率為 1 時,此時 為純偏振光,當偏光率為 0 時,此時為非偏振光,而偏光率介於 0 與 1 之間則為部分偏振光。 最後,我們可以利用光的橢圓偏振來描述史脫克參數 0 1 0 2 3 1 cos 2 cos 2 sin 2 cos 2 sin 2 S S P S I S P S P θ ε θ ε ε ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ (2.24) 其中I0為光波的總亮度,P 為偏光率,θ為橢圓傾角,ε為橢圓率角。 另外,在偏極光量測中,我們經常以史脫克參數來推算橢圓偏光 參數Δ與Ψ,其關係如下式 0 1 0 2 3 1 cos 2 sin 2 cos 2 sin 2 sin 2 S S S I S S ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ − Ψ ⎥ ⎢ ⎥ ⎢ ⎥ = = ⎢ ⎥ ⎢ Ψ Δ ⎥ ⎢ ⎥ ⎢− Ψ Δ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ (2.25) 透過史脫克參數的量測,我們可以將出射光的偏振態加以量化, 成為橢圓偏光術的量測基礎。
Polarization State Jones Vector ( , )Δ Ψ ( , )ε θ Stokes Vector 1 0 ⎡ ⎤ ⎢ ⎥ ⎣ ⎦ (0,0) (0,0) 1 1 0 0 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 0 1 ⎡ ⎤ ⎢ ⎥ ⎣ ⎦ (0, )2 π (0, ) 2 π 1 1 0 0 ⎡ ⎤ ⎢ ⎥− ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 1 1 1 2 ⎡ ⎤ ⎢ ⎥ ⎣ ⎦ (0, )4 π (0, ) 4 π 1 0 1 0 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 1 1 1 2 ⎡ ⎤ ⎢ ⎥− ⎣ ⎦ ( , )4 π π (0, ) 4 π − 1 0 1 0 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥− ⎢ ⎥ ⎣ ⎦ 1 1 2 i ⎡ ⎤ ⎢ ⎥− ⎣ ⎦ ( 2 4, ) π π − ( ,0) 4 π 1 0 0 1 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥− ⎣ ⎦ 1 1 2 i ⎡ ⎤ ⎢ ⎥ ⎣ ⎦ ( , )2 4 π π ( ,0) 4 π − 1 0 0 1 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 表 2-1 不同偏振態的表示法
2.2.3 穆勒矩陣(Mueller matrix) 光的偏振態可以透過改變光的振幅、相位以及偏光率而有所不 同。當偏振光通過光學元件之後,其偏振態的改變可以由 4 項史脫克 參數的線性組合關係表示。當入射光的史脫克參數為 ( , , , )0 1 2 3 T i S = S S S S 0 00 0 01 1 02 2 03 3 1 10 0 11 1 12 2 13 3 2 20 0 21 1 22 2 23 3 3 30 0 31 1 32 2 33 3 S m S m S m S m S S m S m S m S m S S m S m S m S m S S m S m S m S m S ′ = + + + ′ = + + + ′ = + + + ′ = + + + (2.26) 可以得到其出射光的史脫克參數 ( 0, 1, 2 , 3)T o S = S ′ ′S S ′ ′S ,以矩陣形式可以 改寫為 0 00 01 02 03 0 1 10 11 12 13 1 20 21 22 23 2 2 30 31 32 33 3 3 o i S m m m m S S m m m m S S M S m m m m S S m m m m S S ⎡ ′⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ′⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = ⋅ ⇒ = ⋅ ⎢ ⎥ ⎢ ⎥ ′ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢⎣ ⎥ ⎢ ⎥⎦ ⎣ ⎦ ′ ⎢ ⎥ ⎣ ⎦ (2.27) 我們將此光學元件改變入射光與出射光的偏振態之間的能力表示為 一個 4 乘 4 的傳導矩陣 M,稱為穆勒矩陣(Mueller matrix),我們可以 透過穆勒矩陣來預估各偏光元件(polarizing element)對於光偏振態改 變的能力。 當光學路徑中有數個偏光元件時,我們可以將出射光的史脫克參 數透過各偏光元件以及入射光的史脫克參數之間的線性組合,以矩陣 乘法表示為 2 1 o n i S =M ⋅ ⋅" M ⋅M S⋅ (2.28)
其中Mi為各偏光元件的穆勒矩陣。 以下將列舉幾種光學元件的穆勒矩陣 (1)旋轉器(rotator),旋轉角(rotation angle)為 C 角 1 0 0 0 0 cos 2 sin 2 0 0 sin 2 cos 2 0 0 0 0 1 R C C M C C ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ = ⎢ − ⎥ ⎢ ⎥ ⎣ ⎦ (2.29) (2)偏光片(polarizer),方位角(azimuth angle)為 P 角 2 2 1 cos 2 sin 2 0 cos 2 cos 2 sin 2 cos 2 0 1
( )
sin 2 sin 2 cos 2 sin 2 0 2 0 0 0 0 P P P P P P P M P P P P P ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ (2.30)
(3)補波片(compensator),方位角為θ角,相位延遲量(phase retardation)
為δ
2 2
2 2
1 0 0 0
0 cos 2 cos sin 2 (1 cos )sin 2 cos 2 sin sin 2 ( , )
0 (1 cos )sin 2 cos 2 sin 2 cos cos 2 sin cos 2 0 sin sin 2 sin cos 2 cos
RE M θ δ θ δ θ δ θ θ δ θ δ θ θ θ δ θ δ θ δ θ δ θ δ ⎡ ⎤ ⎢ + − ⎥ ⎢ ⎥ = ⎢ − + − ⎥ ⎢ − ⎥ ⎣ ⎦ (2.31)
當相位延遲為π時,此補波片又被稱為半波片(half wave plate);當相
位延遲為
2
π 時,又被稱為四分之一波片(quarter wave plate),此兩種光
光學元件 穆勒矩陣 光學元件 穆勒矩陣 線性偏光片 (0°) 1 1 0 0 1 1 0 0 1 0 0 0 0 2 0 0 0 0 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 四分之一波片 (0°) 1 0 0 0 0 1 0 0 0 0 0 1 0 0 1 0 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎣ ⎦ 線性偏光片 (90°) 1 1 0 0 1 1 0 0 1 0 0 0 0 2 0 0 0 0 − ⎡ ⎤ ⎢− ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 四分之一波片 (90°) 1 0 0 0 0 1 0 0 0 0 0 1 0 0 1 0 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎣ ⎦ 線性偏光片 (+45°) 1 0 1 0 0 0 0 0 1 1 0 1 0 2 0 0 0 0 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 四分之一波片 (+45°) 1 0 0 0 0 0 0 1 0 0 1 0 0 1 0 0 ⎡ ⎤ ⎢ − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 線性偏光片 (-45°) 1 0 1 0 0 0 0 0 1 1 0 1 0 2 0 0 0 0 − ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢− ⎥ ⎢ ⎥ ⎣ ⎦ 四分之一波片 (-45°) 1 0 0 0 0 0 0 1 0 0 1 0 0 1 0 0 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎣ ⎦ 右旋圓偏光片 1 0 0 1 0 0 0 0 1 0 0 0 0 2 1 0 0 1 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 空氣 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 左旋圓偏光片 1 0 0 1 0 0 0 0 1 0 0 0 0 2 1 0 0 1 − ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢− ⎥ ⎣ ⎦ 鏡面 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ − ⎥ ⎣ ⎦ 表 2-2 常見光學元件的穆勒矩陣
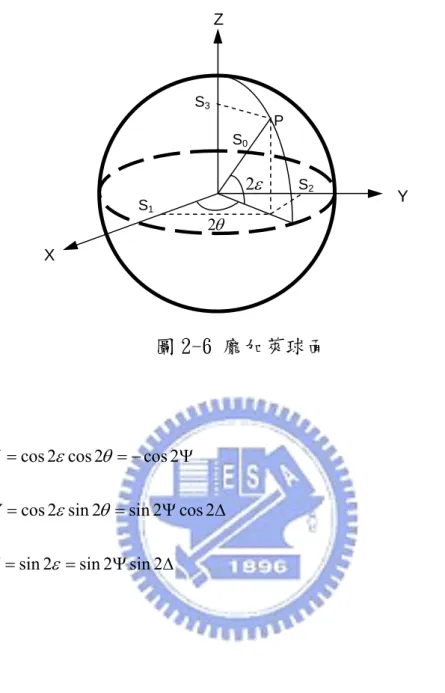
2.2.4 龐加萊球面(Poincaré sphere) 1892 年,法國數學家Henri Poincaré 發現光學的偏振態可以被投 影在一個空間中的球面上,此球面稱為龐加萊球面(Poincaré sphere), 直到 20 世紀中期,科學家們發現,任何的偏振態都可以透過史脫克 參數S1、S2以及S3在龐加萊球面上找到其對應的位置,當我們改變偏 光元件的方位角時或是相位延遲,偏振態的改變會使其在龐加萊球面 上的投影量隨著特定的軌跡移動,因此各種光學元件所造成光的偏振 態改變,皆可以透過龐加萊球面來預測。 我們以一個直角座標來描述龐加萊球面,為了專注於其特性的描 述,先以純偏振光作為範例。在龐加萊球面上,其x、y 以及 z 座標 分別為史脫克參數的S1、S2以及S3,同時,也可以利用光的橢圓偏振 以及橢圓偏光參數Δ與Ψ來找到與龐加萊球面的對應關係,其關係如 下
圖 2-6 龐加萊球面
cos 2 cos 2 cos 2
X = ε θ = − Ψ (2.32)
cos 2 sin 2 sin 2 cos 2
Y = ε θ = Ψ Δ (2.33)
sin 2 sin 2 sin 2
Z = ε = Ψ Δ (2.34) Z Y X P S3 S2 S0 2θ 2ε S1
2.3 偏振態產生器(PSG)與偏振態分析器(PSA)
偏振態產生器(PSG)與偏振態分析器(PSA)決定了系統的量測能 力。使用前者的目的在於將光源轉變為偏振光,並且能藉由調整元件 的方位角或者相位延遲量調變入射光的偏振態;而後者則是被用為分 析出射光的偏振態。在偏振光量測中,會同時利用PSG 以及 PSA 分 析樣品改變偏振態的機制,以量測各種偏光參數[2]。 圖 2-7 偏極光量測系統 PSA 由一至數個偏光元件以及光偵測器所組成,經常使用的元件 包括偏光片、相位延遲片與相位調變器。為了能夠精確的控制並且分 析偏振態,通常會利用各元件的穆勒矩陣與以及偏振光的史脫克參數 間的線性組合關係計算量測的結果。不同的組成元件與各元件在量測 過程中的方位角決定了PSA 的量測能力,也就是決定在 PSA 能夠量 測完整(complete)或是部分(partial)的史脫克參數。 Detector Source Sample PSG PSA光參數Δ與Ψ或是史脫克參數。如果要使系統能夠量測樣品的穆勒矩 陣,其入射偏振態必須要能透過線性組合產生所有的橢圓偏振光 [2],也就是PSG 必須能控制入射偏振態中的S1、S2和S3三項史托克 參數,因此在穆勒矩陣偏光儀中,至少需要四種彼此線性獨立的入射 偏振態,才能完全的量測穆勒矩陣中 16 項參數。若是系統的PSG 無 法完全控制入射偏振態,則穆勒矩陣中至少有一行參數無法求得;若 是PSA 無法量測的所有的史托克參數,則穆勒矩陣中至少有一列參 數無法求得,因此在一個不完整的偏極光量測系統中,只能量測到穆 勒矩陣中的 12 個或 9 個參數。 由於PSG 以及 PSA 決定了系統的特性,因此一個良好的偏光 儀,必須要準確的控制PSG 產生各組入射偏振態,並且利用 PSA 精 確的分析所有出射的偏振態,才能得到可靠的偏光參數。
第三章 鎖相式光彈調變穆勒矩陣
偏光儀
3.1 文獻回顧-穆勒矩陣偏光儀
傳統的穆勒矩陣偏光儀是透過偏光片與補波片等偏光元件組成 PSG 以及 PSA,並經由旋轉光學元件調變入射偏振態與分析出射偏 振態,最後透過傅立葉分析法將光強度轉換為待測的穆勒矩陣,常見 的旋轉元件式(rotating-element)穆勒矩陣偏光儀有以下數種,其 PSG 以及PSA 包括旋轉偏光片(rotating-polarizer)與旋轉補波片與固定偏光片(rotating compensator and fixed polarizer)兩種形式。
(1)旋轉偏光片/旋轉析光片(RP/RA)系統[4] 圖 3-1 RP/RA 系統 Analyzer Detector Polarizer Source Sample A P
如下
∑
= + + = 4 1 2 2 0 0 ) 2 sin 2 cos ( 4 k k k kP b kP a a I I (3.1) 其中I0為入射光的強度,穆勒矩陣可以由傅立葉分析所得到的 9 項係 數結合而成。 0 2 2 03 6 4 8 4 8 13 6 4 8 4 8 23 30 31 32 33 a a b m a a a b b m M b b b a a m m m m m ⎡ ⎤ ⎢ + − ⎥ ⎢ ⎥ = ⎢ + − ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ (3.2) 由於轉動偏光片僅能改變入射光的線性偏振態,因此本系統無法得到 樣品的去偏極化(depolarization)與圓偏振光的特性,只能得到穆勒矩 陣中僅與線性偏振態有關的 9 項係數。 (2)旋轉偏光片/旋轉補波片-析光片(RP/RCFA)系統[5] 圖 3-2 RP/RCFA 系統 如上圖,系統以一片轉動的偏光片作為 PSG,且以一旋轉的補波 片與一片方位角固定的析光片作為PSA,當偏光片與補波片之間以 Detector Sample Quarter-wave plate C Polarizer Source P Analyzer(0°)1:3 的旋轉速度同步轉動時,穆勒矩陣與光強度之間的關係如下 7 0 2 2 1 0 4 ( kcos 2 ksin 2 ) k I a a kP b kP I = = +
∑
+ (3.3) 透過傅立葉分析,可以將得到的 15 項係數組合成樣品的穆勒矩 陣。 0 6 1 5 7 1 5 7 03 6 5 7 7 5 13 6 5 7 5 7 23 3 2 2 33 2 2( ) 2( ) 2 2( ) 2( ) 2 2 2 a a a a a b b b m a a a b b m M b b b a a m b b a m − − − − + ⎡ ⎤ ⎢ + − ⎥ ⎢ ⎥ = ⎢ + − ⎥ ⎢ − − − ⎥ ⎢ ⎥ ⎣ ⎦ (3.4) 由於本系統的PSG 無法改變入射光的線性偏振態,使得本系統 無法得到樣品的穆勒矩陣中第四列的係數,即使PSA能夠分析完整的 出射偏振態,本系統依然無法得到完整的穆勒矩陣。 (3)偏光片-旋轉補波片/旋轉補波片-析光片(FPRC/RCFA)系統[6] 圖 3-3 FPRC/RCFA 系統 Analyzer (0°) Detector Polarizer (0°) Source Sample Quarter-wave plate C2 C1 Quarter-wave plate此系統利用偏光片與補波片作為PSG,而系統的 PSA 則是利用 補波片與析光片所組成,並以 5:1 的轉速改變補波片方位角 C。在 量測過程中入射光依序通過PSG、待測樣品、PSA,最後由光偵測器 接收光強度。 12 0 2 2 1 0 4 ( kcos 2 ksin 2 ) k I a a kC b kC I = = +
∑
+ (3.5) 其中I0為入射光的強度,穆勒矩陣可以由傅立葉分析所得到的 25 項 係數結合而成。 0 2 8 10 12 2 8 12 2 8 12 1 9 11 10 8 12 8 12 8 12 11 9 10 8 12 8 12 8 12 9 11 3 5 7 7 3 7 3 6 4 2( ) 2( ) 2( ) 4( ) 4( ) 2( ) 2( ) 4( ) 4( ) 2( ) 2( ) 2( ) a a a a a a a a b b b b b b a a a a a b b b b M b b b b b a a a a b b b b b a a a a − + − + − − + − + − ⎡ ⎤ ⎢ − − + − + − ⎥ ⎢ ⎥ = ⎢ − − + − − ⎥ ⎢ − + − + − − ⎥ ⎢ ⎥ ⎣ ⎦ (3.6) 由於此系統結合了完整的PSG 以及 PSA,因此能藉由分析得到 樣品穆勒矩陣中的所有係數。 以上數種穆勒矩陣偏光儀皆透過同步旋轉偏光元件,並透過傅立 葉分析以得到樣品的穆勒矩陣,然而,不論是偏光片或是補波片的旋 轉接有可能對量測結果造成顯著的影響。首先,系統中元件的旋轉容 易造成光束的偏移,進而產生寄生誤差,另外,元件旋轉速率的不同 步與方位角起始點的不匹配皆會造成測量結果的不準確[7],因此, 偏光量測系統應該減少偏光元件的旋轉。 為了減少因光學元件的旋轉而導致的量測誤差,許多研究者以單 一(single phase modulator)或雙重相位調變器(dual phase modulator)取代系統中的旋轉元件,以產生或量測偏振態。 (4)偏光片-相位調變器/相位調變器-析光片(PM/PM)系統[8] 圖 3-4 PM/PM 系統 圖 3-5 PM/PM 系統 2 如圖 3-4,當以單一相位調變器與偏光片和析光片作為偏極光量 Analyzer (45°) Detector Polarizer (0°) Source Sample
Phase modulator (45°) Phase modulator (90°)
Analyzer (0°/45°) Detector Polarizer (0°/45°) Source Sample Phase modulator (0°/45°) Phase modulator (0°/45°)
振幅與調變頻率相關,其關係如下 00 01 1 03 1 20 2 21 1 2 23 1 2 30 2 31 1 2 33 1 2 0 4I m m c m s m c m c c m s c m s m c s m s s I = + + + + + + + + 0
cos cos( sin )
i i i i
c = Δ = Δ ωt
0
sin sin( sin )
i i i i s = Δ = Δ ωt (3.7) 其中Δ0i代表相位調變器的調變振幅,ωi則代表調變頻率。 因此,我們可以將光強度值透過傅立葉分析得到穆勒矩陣中的 9 項係 數。 當偏光元件的方位角固定時,由於PSG 的不完整,僅能在穆勒 矩陣中第二行與第三行元素中擇一量測;而PSA 的不完整則造成穆 勒矩陣中的第二列與第三列元素必有一列無法得到,為了使此系統能 夠量測完整的穆勒矩陣,1992 年Anderson 改變偏光片與相位調變器 的相對方位角,透過量測 4 組部份(partial)穆勒矩陣,以組合成完整 的穆勒矩陣,如圖 2-14。其方位角組合如下[8] 1 (0 ) 2(45 ) 1(45 ) (0 ) i I =A D ⋅PM D ⋅M PM⋅ D ⋅P D ⋅S 2 (45 ) 2(0 ) 1(45 ) (0 ) i I =A D ⋅PM D ⋅M PM⋅ D ⋅P D ⋅S 3 (0 ) 2(45 ) 1(0 ) (45 ) i I = A D ⋅PM D ⋅M PM⋅ D ⋅P D ⋅S 4 (45 ) 2(0 ) 1(0 ) (45 ) i I =A D ⋅PM D ⋅M PM⋅ D ⋅P D ⋅S (3.8) 其中P( )θ 、PM1( )θ 、PM2( )θ 與A( )θ 分別代表偏光片、兩台相位調變器 以及析光片的方位角。藉由 4 次的量測的互補性,透過傅立葉分析即
可以得到完整的穆勒矩陣。 此系統存在著一些待解決的問題,首先,為了避免偏光片的方位 角的改變影響入射光的強度,本系統的光源必須為非偏振光或是圓偏 振光,因此無法使用具有線性偏振態的雷射作為光源。另外,由於完 整的穆勒矩陣是由 4 組部分的穆勒矩陣中的 36 個參數組合而成,使 得量測系統與待測參數之間的線性關係不復存在,因此,穆勒矩陣中 的各項參數會受到不同程度的系統誤差影響,使其物理可靠度 (physical realizability)降低[9]。 (5)偏光片-雙重相位調變器/雙重相位調變器-析光片(DPM/DPM)系 統[10] 圖 3-6 DPM/DPM 系統 Analyzer (0°) Detector Polarizer (0°) Source Sample
Dual phase modulator (45°) (0°)
Dual phase modulator (0°) (45°)
以得到完整的穆勒矩陣。此系統的光強度與相位調變器特性參數的關 係如下 00 01 2 02 1 2 03 1 2 10 3 11 2 3 12 1 2 3 13 1 2 3 20 3 4 21 2 3 4 0 22 1 2 3 4 23 1 2 3 4 30 3 4 31 2 3 4 32 1 2 3 4 33 1 2 3 4 4I m m c m s s m c s m c m c c m s s c m c s c m s s m c s s I m s s s s m c s s s m s c m c s c m s s s c m c s s c = + + − + + + − + + + − − − + + (3.9) 其中Δ0i代表相位調變器的調變振幅,ωi則代表調變頻率。因此,我 們可以將光強度值透過傅立葉分析得到完整的穆勒矩陣。 以相位調變器取代旋轉偏光元件的優點,在於量測過程中不需要 旋轉任何光學元件。然而,當系統中使用一台以上的相位調變器時, 就必須考慮其同步性,由於任何一台相位調變器的時間相位皆會影響 光強度,一旦相位調變器無法被同步而且穩定的驅動,我們便無法得 到準確的量測結果。 上述的各種穆勒矩陣偏光儀皆是透過傅立葉分析得到穆勒矩 陣。此方法的優點在於運算過程簡單,不必個別計算PSG 產生的入 射偏振態與PSA 的分析結果即可透過倍頻訊號得到樣品的穆勒矩 陣。一般而言,傅立葉分析法需要 64 個以上的光強度,這個限制並 不會對單點量測造成影響,但卻其龐大資料量與冗長的取樣時間卻侷 限了此系統在二維量測上的應用。
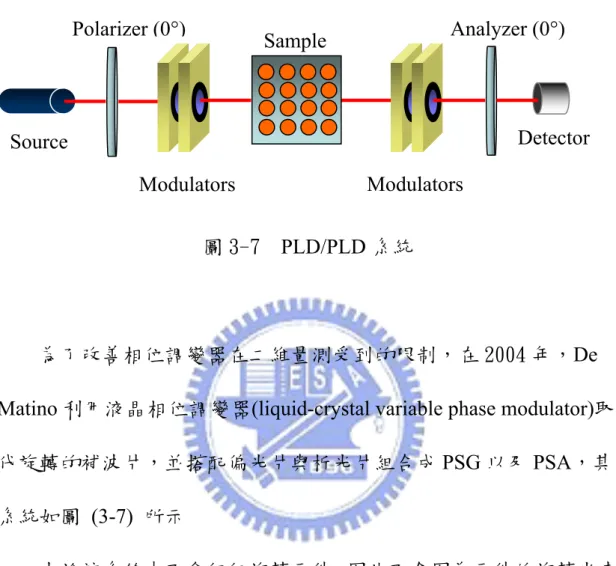
(6)偏光片-液晶相位調變器/液晶相位調變器-析光片(PLD/PLD)系 統[11]
圖 3-7 PLD/PLD 系統
為了改善相位調變器在二維量測受到的限制,在 2004 年,De Matino 利用液晶相位調變器(liquid-crystal variable phase modulator)取
代旋轉的補波片,並搭配偏光片與析光片組合成PSG 以及 PSA,其 系統如圖 (3-7) 所示 由於該系統中不含任何旋轉元件,因此不會因為元件的旋轉光束 導致光束的偏移,另外,由於液晶相位調變器是以電訊號改變元件的 雙折射特性,相較於傳統的旋轉元件系統,此系統的取樣時間較短, 可以大幅提升量測速度。 Source Modulators Analyzer (0°) Detector Polarizer (0°) Sample Modulators
分析量測結果。另外,隨著操作時間增加,元件溫度的上升也會改變 在同樣電訊號下的雙折射效應,每上升 1℃的偏差量約為 0.4%[28], 這項缺點限制此系統在長時間量測與連續量測上的應用。 在穆勒矩陣偏光儀中,元件的偏光特性必須被精確的控制,不論 是旋轉元件造成方位角的偏差、多重相位調變器驅動的不同步,或是 溫度導致相位延遲量的變化都會使量測結果不準確。為了減少系統中 光學元件的轉動,同時維持系統的穩定性,我們利用偏光片與四分之 一波片在固定方位角下產生可控制的入射偏振態,並以PEM 取代液 晶相位調變器,使出射偏振態能被準確的分析,以增加系統的可靠度。
3.2 光彈調變器(photoelestic modulator)
光彈調變器(PEM)是本論文中所使用的相位調變系統,由控制器 (controller),高壓驅動器(electronic head)與光學頭(optical head)所組成 構造如圖所示。 圖 3-8 PEM-90 光彈調變器系統 在控制器內包含有控制面板和信號輸出端,在控制面板上可以設定調 變振幅 Δ0(modulation amplitude) 以及所使用的入射光波長,在本機 型中其調變頻率 ω (modulation frequency) 則固定為約 51kHz。接著 控制器會透過信號輸出端將信號傳入高壓驅動器,使其產生交流高壓 Controller Optical head Electronic head
當光學頭接收到高壓驅動器所產生的電訊號時,壓電換能器會隨著電 場的方向改變而產生週期性的膨脹或收縮應力,使得光學元件區垂直 於受力方向產生線性雙折射效應(linear birefringence, LB),此現象 被稱為光彈效應 (photoelestic effect),因此 PEM 可以被視為是一個週
期性改變相位的相位延遲片(phase retarder),其相位Δp受到調變振幅 0 Δ 以及調變頻率ω的影響,可以表示為 Δ = Δp 0sin( )θp (3.10) 因此PEM 在方位角為 0 度時的穆勒矩陣可以表示如下 1 0 0 0 0 1 0 0 ( ) 0 0 cos sin 0 0 sin cos PEM p p p p p M ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ Δ =⎢ ⎥ Δ − Δ ⎢ Δ Δ ⎥ ⎢ ⎥ ⎣ ⎦ (3.11) 由於PEM 的相位隨著時間而改變,這與其他相位延遲片透過旋轉元 件等空間調變來改變相位有明顯的不同,因此我們將θp稱為時間相位 (temporal phase ),我們可以利用其週期性變化的特性,透過鎖相技術 得到特定的偏極態。 圖 3-9 時間相位的週期性變化 2 R=λ 2 λ 2 λ − 45 + D −45D +45D −45D +45D
PEM 可以被用來量測特定的光學現象,例如線性二色性(linear
dichroism, LD)、圓二色性 (circular dichroism, CD)、線性雙折射效應 (linear birefringence, LB)以及圓雙折射效應(circular birefringence, LB),或是搭配其他偏光元件組成偏振態產生器或是偏振態分析器
[13]。在本論文中,我們利用PEM 與析光片組成偏振態分析器
3.3 實驗原理
3.3.1 閃頻式量測架構基於對PEM 偏光特性的了解,本實驗室成功的將 PEM 應用於二
維量測。為了鎖定快速調變下的特殊時間相位,我們藉由PEM 控制
器所輸出的方波訊號(square wave)來當作參考訊號,輸入可程式化脈 衝延遲產生器(Programmable delay/pulse generator)當作觸發訊號 (trigger signal)來驅動半導體雷射作激發,使半導體雷射之激發時間與 PEM 建立了同步的時間關係,此技術稱為同步照射(synchronous illumination)[4]。我們偵測時所需要的時間相位,則可藉由改變可程 式化脈衝延遲產生器中的脈衝延遲時間來達成。PEM 的時間相位經 由此方法被鎖定,除非改變脈衝激發的時間,系統所偵測光強度值不 受PEM 的時變訊號影響而改變。由此可知系統偵測速度則決定在光 偵測器上,如以電荷耦合元件 (CCD) 為例,其曝光時間為 0.5 秒時, 所偵測到的光強度大小約是25000 (=50kHz/2)次雷射脈衝強度之 合,藉由控制每次曝光時間與配合不同的脈衝激發時間,則可以藉由 偵測到四個時間相位的光強度大小而得到二維的橢圓偏光參數Δ與 Ψ。
圖 3-10 量測方法說明示意圖
本論文將以閃頻式橢圓偏光儀作為基礎,為了避免多重相位調變
器同步驅動的困難,在使用單一PEM 的前提下,將此系統僅能量測
3.3.2 波形分析法 本系統以PEM 與析光片的組合來分析出射光的偏振態,因此如 何準確的鎖定PEM 特定的時間相位下的光強度值成為重要的課題, 我們以PEM 控制器所輸出的方波作為參考訊號,並利用此訊號觸發 數據擷取卡紀錄光強度隨時間變化的波形。但數據擷取卡記錄的光強 度與PEM 的相位變化存在約八分之一週期的時間延遲關係,因此我 們必須藉由分析光強度訊號的波形才能鎖定特定的時間相位,並將其 強度值導入樣品偏光參數的計算。 本系統的數據擷取速率為10MHz,由於 PEM 的調變頻率約為 51kHz,因此在光訊號波形的週期 20 微秒(μs)中,可以記錄196 個 光強度值。我們以 500 個光強度訊號為一組,透過 500 組訊號平均以 減少光強度不準確造成的誤差。當析光片平行於偏光片時,且待測的 四分之一波片的方位角為15˚時,示波器所呈現的波形如下。 圖 3-11 光強度波形圖
此時光強度隨著時間變化的關係為
0(1 1cos( sin ) 3sin( sin ))
4 4 p 2 p
I
I = + π θ − π θ (3-12)
其光強度的一階微分是
0 cos [2 3 cos( sin ) sin( sin )]
16 p p p I I′ = − π θ π θ + π θ (3-13) 當 (3-13) 式為 0 時,可以得到光強度為極大值或是極小值的時間相 位,由上式以及圖3-11 可以得知當時間相位θp為 90°時,光強度為 區域極大值。接著分析波形找出此區域極大值,並將此極大值設為參 考點,其時間相位θp定為90˚。藉由分析波形可以決定各組光強度訊 號中的參考點,再經由內插法即可鎖定時間相位為0˚與 30˚,或其他 任何時間相位的的光強度訊號。 由於數據擷取卡的取樣速率並非遠大於PEM 的調變速率,因此 作為參考點的區域極大值未必能準確的與時間相位90˚重合,在經過 進一步的誤差修正之前,最大時間相位的誤差會小於取樣速率的一 半,也就是在0.92˚以內[14]。
3.4 儀器規格與實驗架構
本實驗所使用的各光學儀器與偏光元件的規格如下 1.光源
氦氖雷射:Melles Griot,05-LHR-151,功率 15mW,波長 632.8nm。 2.偏光元件
偏光片與析光片:Melles Griot,03FPG007 Dichroic sheet polarizer,extinction ratio:10-4。
四分之一波片:Knight Optical,RYM2506,zero order mica retarder 1/4
Wave Plate±0.01λ, for 633nm。
光彈調變器(PEM):Hinds instruments,PEM-90。 3.訊號接收
光偵測器:Thorlabs,PDA55 silicon pin diode,spectral range: 400~1000nm。
數據擷取卡:National instruments,PCI-6115。 接線盒:National instrument BNC-2110。
圖 3-12 鎖相式光彈調變穆勒矩陣偏光儀系統 本實驗的實驗架構如圖 3-12,我們透過偏光片的方位角來訂定 系統的光軸方向,並設其方位角為-45˚,接著透過三亮度量測法確定 析光片的方位角,並將其方位角旋轉至 0˚,接下來則是以三亮度量測 法分別確定PEM 以及四分之一波片的方位角,並將其方位角旋轉至 0˚以及-15˚,最後將各偏光元件依序排列,並將光偵測器的信號輸出 端與PEM 參考訊號的輸出端與接線盒連接,即完成系統的架構。本 系統訊號擷取的方式是由儀器控制軟體LabView 控制光學元件的旋 轉,並透過軟體指令從數據擷取卡中取得波形訊號,最後利用數學計 He-Ne Laser Polarizer(-45° Quarter-wave plate PEM(51kHz) Analyzer Detector Sample DAQ Card
錄光強度,並以數據擷取卡(data acquisition card)紀錄光強度隨時間變 化的波形。本系統可以透過穆勒矩陣可以表示如下。 ( , ) ( , ) out p i S =PSA aθ M PSG p c S (3-14) 0 2 1 2 2 3 00 01 02 03 10 11 12 13 1 0 0 0 1 cos 2 sin 2 0 0 1 0 0
cos 2 cos 2 sin 2 cos 2 0 1
0 0 cos( sin ) sin( sin ) sin 2 sin 2 cos 2 sin 2 0
2
0 0 sin( sin ) cos( sin )
0 0 0 0 out p p p p S a a S a a a a S S a a a a S m m m m m m m m m π θ π θ π θ π θ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = = ⋅ ⋅ ⎢ − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ 2 2 20 21 22 23 30 31 32 33 1 0 0 0 1
0 cos 2 cos 2 sin 2 sin 2 cos 2 0 cos 2 sin 2 sin 2 cos 2 sin 2 0 sin 2 cos 2 0 0 c c c c p m m m c c c c p m m m m c c ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢⋅ ⎥ ⎢⋅ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (3-15) 其中a、p 以及 c 分別代表析光片、偏光片以及四分之一波片的方位 角;θp則代表PEM 的時間相位。 本系統的PSG 是由偏光片以及四分之一波片所組成,其中偏光 片的方位角p 置於 -45˚,透過改變四分之一波片的方位角來產生四 個不同的入射光偏振態。此 PSG 所產生的入射偏振態 Sin 隨四分之 一波片方位角的變化如下 2 1 cos 2 sin 2 ( ) sin 2 cos 2 in c c S c c c ⎡ ⎤ ⎢− ⎥ ⎢ ⎥ = ⎢ − ⎥ ⎢ ⎥ ⎣ ⎦ (3-16) 為了使入射偏振態彼此線性獨立,四分之一波片的方位角c 依序為 -90˚、-45˚、-15˚與 15˚,因此入射樣品的偏振態分別為左旋偏振光
1 0 0 1 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥− ⎣ ⎦ 、線性偏振光 1 0 1 0 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥− ⎢ ⎥ ⎣ ⎦ 和兩個橢圓偏振光 1 3 4 1 4 3 2 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢− ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 與 1 3 4 1 4 3 2 ⎡ ⎤ ⎢ ⎥ ⎢− ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 。
系統的PSA 是由 PEM 以及一析光片所構成,在量測過程中,PEM
的方位角與系統光軸維持平行,即0˚,藉由鎖定的時間相位θp來分析 出射偏振態,使用的時間相位分別為0˚、30˚以及 90˚,而析光片則改 變方位角a為0˚以及 45˚。藉由矩陣運算,我們可以個別分析入射光 與出射光的偏振態,並將波形分析所得到的 16 個光強度以線性組合 的關係得到待測樣品的穆勒矩陣,詳細內容請見附錄A。 相較於傳統旋轉四分之一波片的穆勒矩陣偏光儀,本系統減少了 元件旋轉的次數,因此較不受到元件方位角誤差的影響,另外以波形 分析取代傅立葉分析不但使系統不受旋轉速率匹配的影響,也奠定了 本系統拓展至二維量測的基礎。
3.5 實驗結果與偏光參數分析
我們可以藉由穆勒矩陣中的16 個參數來描述該物體所有的偏光 特性,包括(1)偏極量 (polarizance):說明該物體能調變非偏振光成 為橢圓偏振光的特性;(2)吸收量 (diattenuation):該物體對於水平與 鉛直的線性偏振光、+45∘以及-45∘的線性偏振光與左右旋偏振光的 吸收度;(3)旋轉量 (rotation):對於偏振態的旋轉能力;(4)延遲量 (retardation):對於平行光軸和垂直光軸的偏振光間相位延遲率的改 變;(5)去偏極化量 (depolarization):改變出射光偏光率的程度。這些 特性參數使我們能完全掌握物體對於偏光性質,這也是量測樣品穆勒 矩陣的目的。 藉由分析穆勒矩陣中各項元素值,可以得到樣品的各項偏光參 數,如相位延遲量或是方位角,但樣品的偏光參數與穆勒矩陣之間並 不存在固定的關係,因此隨著樣品的性質不同,分析穆勒矩陣的方式 需要有所調整。 以分析一個具有吸收特定線性偏振光特性的樣品為例,此樣品的 穆勒矩陣與偏光片類似,可以表示如下 2 2 2 2 1 2 2 2 2 2 2 1 3 3 0 0 0 0 0 0 0 0 0 0 0 0 0 2 0 0 0 0 0 0 0 2 x y x y x y x y x y x y P P p p p p P P p p p p P p p P p p ⎡ + − ⎤ ⎡ ⎤ ⎢ − + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢= ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ (3-17) 其中px與py代表樣品水平與垂直光軸的穿透係數,而 2 x p 與py2則代表水平與垂直光軸的穿透光強度。一般而言,一個好的偏光片的py值會 趨近於 0,代表其垂直穿透軸沒有發生漏光的情形,由於我們無法直 接求出其穿透係數px與py,僅能以其比值 y x p p 來判斷樣品的特性,這 項比值又稱為消光比(Extinction ratio),通常可以在元件的特性參數的 找到此項係數。 當待測樣品的方位角未知時,樣品的穆勒矩陣可以表示如下 00 01 02 03 1 2 2 2 2 10 11 12 13 2 1 3 1 3 2 2 20 21 22 23 2 1 3 1 3 30 31 32 33 cos 2 sin 2 0
cos 2 cos 2 sin 2 ( )sin 2 cos 2 0
1
sin 2 ( )sin 2 cos 2 sin 2 cos 2 0
2 0 0 0 0 m m m m P P P P P m m m m P P P P P P P P P P m m m m P P P P P P P P P P m m m m ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ + − ⎥ ⎢ ⎥= ⎢ ⎥ ⎢ ⎥ ⎢ − + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ (3-18) 其中 P 代表方位角,也就是穿透軸與系統光軸的夾角。從上式可以得 知系統的光軸與矩陣係數的關係如下 1 20 10 0.5* tan (m ) P m − = (3-19) 當樣品為理想的偏光片時,消光比接近 0,其與矩陣係數的關係如下。 2 2 1 00 10 20 2 2 2 00 10 20 ( ) y x p m m m p m m m − + = + + (3-20) 藉由消光比與方位角 P,我們可以完整的描述一個具有線性二色性樣
00 01 02 03 2 2 10 11 12 13 2 2 20 21 22 23 30 31 32 33 1 0 0 0
0 cos 2 cos sin 2 (1 cos )sin 2 cos 2 sin sin 2
0 (1 cos )sin 2 cos 2 sin 2 cos cos 2 sin cos 2
0 sin sin 2 sin cos 2 cos
m m m m m m m m m m m m m m m m θ δ θ δ θ θ δ θ δ θ θ θ δ θ δ θ δ θ δ θ δ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ + − ⎥ ⎢ ⎥ ⎢= ⎥ ⎢ ⎥ ⎢ − + − ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ (3-21) 線性雙折射效應樣品的偏光特性由相位延遲量δ與方位角θ決 定。由上式可以得到相位延遲量δ與矩陣係數的關係如下 1 00 11 22 33 cos ( 1) 2 m m m m δ = − + + + − (3-22) 我們可以透過矩陣主軸上的四項係數求得樣品的相位延遲量。而樣品 的方位角可以透過下列的關係求得 1 13 23 1 tan ( ) 2 m m θ = − − (3-23) 藉由量測樣品的穆勒矩陣並加以分析,我們可以將樣品的各項偏光參 數量化,再以各項偏光參數來描述待測物的各項偏光特性,例如吸收 或是雙折射效應。 Chao 在 1991 年利用偏光片-樣品-析光片的量測系統,透過析光 片方位角的改變,進行樣品各項偏光參數的量測[15]。該系統如下圖 所示
圖 3-13 三亮度量測法系統
光強度 I 隨著析光片方位角 A 以及樣品的橢圓偏光參數Δ與Ψ的改變
值可以表示為
0(1 cos 2 cos 2 cos sin 2 sin 2 )
I =I − A Ψ − Δ A Ψ (3-24) 其中I0為入射光的強度。我們可以透過橢圓偏光參數Δ與Ψ推算出樣 品的各項偏光參數。 鎖相式光彈調變穆勒矩陣偏光儀能以波形分析法鎖定特定時間 相位的強度值,並計算其穆勒矩陣,接著我們以常見的偏光元件作為 樣品,透過其穆勒矩陣求得其方位角、相位延遲量與消光比等偏光參 數,並與三亮度量測法所得結果對照,以驗證本系統在量測上的可行 性。 Analyzer Detector Polarizer Source Sample A
3.5.1 量測空氣的穆勒矩陣 首先我們以空氣作為量測樣品,由於空氣不具有任何吸收與雙折 射特性,當偏振光通過樣品後,偏振態完全不會受到任何的改變,因 此方位角與相位延遲率在空氣的量測中不具物理意義。 我們比較理論值與量測結果 量測樣品:空氣 理論值 量測結果 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 1 0.0041 0.0140 0.0560 0.0109 1.0282 0.0011 0.0452 0.0039 0.0281 0.9750 0.0810 0.0067 0.0046 0.0867 1.0362 − ⎡ ⎤ ⎢− − − ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢− − ⎥ ⎣ ⎦ 表 3-1 空氣的穆勒矩陣量測結果 可以發現量測結果與理論值相近,矩陣主軸上的 4 項參數m00、 11 m 、m22與m33十分接近理論值 1,其餘各項參數皆符合穆勒矩陣的對 稱關係,與理論值之間的差距則小於 0.087,這些非零值的出現則可 歸因於系統誤差,此部份在 4-2 節會有進一步的說明。另外,經過 500 次量測結果所得到的各係數的標準差皆小於 0.02。
3.5.2 量測四分之一波片的穆勒矩陣
本實驗所使用的樣品為四分之一波片,其參數如下 Knight optical,RYM2506
zero order mica retarders-1/4 Wave Plate±0.01λ, for 633nm。
我們先使用三亮度量測法確定樣品的相位延遲量以及方位角,並計算 出穆勒矩陣的理論值,接著再以本系統實際量測穆勒矩陣。 我們比較理論值與量測結果 量測樣品:四分之一波片 理論值 量測結果 1 0 0 0 0 0 0 1 0 0 1 0 0 1 0 0 ⎡ ⎤ ⎢ − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 1 0.0374 0.0059 0.0177 0.0317 0.0093 0.0476 0.9766 0.0100 0.0457 1.0039 0.0049 0.0022 1.0241 0.0347 0.0698 − ⎡ ⎤ ⎢− − − ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢− − ⎥ ⎣ ⎦ 三亮度量測法 穆勒矩陣分析法 方位角 45.00˚ 44.85˚ 標準差 0.02˚ 0.71˚ 相位延遲量 87.80˚ 87.62˚ 標準差 0.02˚ 0.13˚
本樣品具有的線性雙折射效應會使垂直與平行光軸的偏振光產 生相位偏移,因此在量測此類偏光元件時,相位延遲量的準確度變的 格外重要。由測量結果得知,穆勒矩陣中各項元素與理論值的差異皆 小於0.07,得到的方位角與理論值的差異小於 0.18˚,至於相位延遲 量則小於0.15˚,另外,經過 500 次量測結果所得到的各係數的標準 差皆小於 0.02。值得一提的是,當四分之一波片的方位角接近45˚ 時,一般偏光儀在判斷方位角時容易產生錯誤,由於量測到的參數較 少,在量測值皆十分接近極值(0、1 或-1)時,容易造成方位角估算 上的錯誤。但若是透過穆勒矩陣偏光儀中進行元件方位角的分析,由 於穆勒矩陣可以透過 16 個元素詳細的描述樣品的偏光特性,相較於 一般偏光儀僅以三或四項參數描述出射光的偏振態,穆勒矩陣偏光儀 的量測結果更為可靠。另外,當待測樣品的相位延遲量未知時,由於 各項參數皆同時受到相位延遲量與方位角的影響,因此無法利用單一 量測的結果,使相位延遲量與方位角能獨立計算,此項缺失將會額外 增加計算的困難度。相較之下,以穆勒矩陣進行量測的優點在於各項 參數之間的關係簡單,同時相位延遲量與方位角得以分開計算,使彼 此的誤差不會透過互相影響而增加,因此穆勒矩陣偏光儀特別適合用 於量測樣本的線性雙折射效應。
3.5.3 量測偏光片的穆勒矩陣
本實驗所使用的樣品為偏光片,其參數如下 Melles Griot,03FPG007
Dichroic sheet polarizer,extinction ratio:10-4。
我們先使用三亮度量測法確定樣品的方位角為0D,並計算出在該方位 角時穆勒矩陣的理論值,接著再以本系統實際量測穆勒矩陣。理論值 與量測結果如下 量測樣品:偏光片 理論值 量測結果 1 1 0 0 1 1 0 0 0 0 0 0 0 0 0 0 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 1 1.0140 0.0791 0.0021 0.9968 0.9814 0.0522 0.0130 0.0430 0.0497 0.0060 0.0022 0.0033 0.0027 0.0002 0.0002 ⎡ ⎤ ⎢ − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢− − − − ⎥ ⎣ ⎦ 三亮度量測法 穆勒矩陣分析法 方位角 0.00˚ 1.24˚ 標準差 0.02˚ 0.08˚ 消光比 0.001 0.034 標準差 0.036
由於本實驗所使用樣品在垂直光軸向的穿透率極小,透過三亮度 量測法可求得其消光係數為0.001,因此偏光片是線性二色性元件中 的典型範例。當偏光片位於0˚時,其穆勒矩陣僅剩m00、m01、m10與m11 為 1,其餘各項係數皆為0,由測量結果可以看出與理論值相接近, 各項係數與理論值的誤差皆小於0.08,而方位角則與三亮度量測法得 到的結果相差1.24˚,消光比則與理論值相差 0.033。為了證明本系統 並非只適用於特定方位角的量測,接著我們旋轉樣品偏光片的方位角 至45D,量測結果與理論值的模擬如下 量測樣品:偏光片 理論值 量測結果 1 0 1 0 0 0 0 0 1 0 1 0 0 0 0 0 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 1 0.0332 1.0010 0.0145 0.0353 0.0115 0.0389 0.0026 0.9964 0.0335 0.9986 0.0147 0.0695 0.0175 0.0731 0.0036 − − ⎡ ⎤ ⎢− − ⎥ ⎢ ⎥ ⎢ − − ⎥ ⎢− − ⎥ ⎣ ⎦ 三亮度量測法 穆勒矩陣分析法 方位角 45.00˚ 43.98˚ 標準差 0.02˚ 0.28˚ 消光比 0.001 0.038 標準差 0.023 表 3-4 偏光片(方位角 45°)的穆勒矩陣量測結果
當偏光片的方位角位於45˚時,其穆勒矩陣僅剩m00、m02、m20與m22 為 1,其餘各項係數皆為 0,從結果中可以發現各項元素與理論值的 最大差異依然小於0.08,透過分析穆勒矩陣,求得的方位角則與三亮 度量測法的結果相差0.98˚,而消光比則相差 0.037,整體結果相較於 方位角平行光軸時更為準確。另外,經過 500 次量測結果所得到的各 係數的標準差皆小於 0.027。 我們比較了樣品的方位角在0˚以及 45˚時的穆勒矩陣,並透過量 測結果比較方位角和矩陣各元素與理論值之間的差異。從結果中可以 看出本系統在樣品的方位角不同時的量測結果十分穩定。




![圖 4-2 常見的偏振態分析器(PSA) 常見偏光儀在 PSA 中使用的補波片相位延遲量以及方位角組合如下 年份 相位延遲量 θ 1 θ 2 θ 3 θ 4 θ 5 EWV 1990[21] 90˚ -45˚ 45˚ 67.5˚ 90˚ 36 1990[22] 90˚ -22.5˚ 0˚ 22.5˚ 45˚ 92 1990 90˚ -30˚ 0˚ 30˚ 60˚ 28 1990 90˚ 0˚ 67.5˚ 135˚ 202.5˚ 24.92 1995[16] 90˚ -45](https://thumb-ap.123doks.com/thumbv2/9libinfo/8748454.205387/74.892.271.637.133.379/中使用延遲θθθθθEWV˚˚˚˚˚˚˚.webp)


