國 立 交 通 大 學
電信工程研究所
碩 士 論 文
基植於相位比較單脈衝技術之機械式追蹤系統
A Mechanical Tracking System Based on
Phase-Comparison Mono-pulse Architecture
研究生:潘海睿
指導教授:黃瑞彬 博士
基植於相位比較單脈衝技術之機械式追蹤系統
A Mechanical Tracking System Based on
Phase-Comparison Mono-pulse Architecture
研 究 生:潘海睿 Student : Hai – Jui Pan
指導教授:黃瑞彬 博士 Advisor : Dr. Ruey – Bing Hwang
國 立 交 通 大 學
電信工程研究所
碩 士 論 文
A Thesis
Submitted to Institute of Communication
College of Electrical Engineering and Computer Science
National Chiao Tung University
in partial Fulfillment of the Requirements
for the Degree of Master of Science
In communication Engineering
August 2012
Hsinchu, Taiwan, Republic of China
i
基植於相位比較單脈衝技術之機械式追蹤系統
學生:潘海睿 指導教授:黃瑞彬 博士 國立交通大學電信工程研究所碩士班摘要
本論文利用相位比較單脈衝系統概念,設計具追蹤訊號功能的機電整合系統。經過 理論推導可證實,當相位比較單脈衝系統在某方位偵測到來波訊號時,單脈衝系統兩天 線之和(Σ)與差(Δ)的相位差會有 180 度之變化,由此確認其對應的方位上有來波。此 系統操作在 2.4GHz,並利用平面式八木宇田天線的高增益特性,將兩垂直極化之天線 水平排列,後端再與比較器、放大器、相位偵測器互相串連,最後利用伺服馬達作為系 統轉動的機制。本論文中所使用的相位偵測器為被動 IQ 混波器,配合 NI LabVIEW DAQ 系統來做整體系統控制與資料擷取,其中包含:伺服機轉動角度控制、量測相位讀取及 數值運算。依據實驗結果顯示,本系統可以即時追蹤動態信號源,將可應用於飛彈巡標 器。ii
A Mechanical Tracking System
Based on Phase-Comparison Mono-pulse Architecture
Student: Hai-Jui Pan Advisor: Dr. Ruey-Bing Hwang
Department of Communication Engineering National Chiao Tung University
Abstract
This thesis employs the phase-comparison mono-pulse system architecture to design a mechatronic system with signal tracking ability. Notably, the direction of incoming wave is confirmed due to the fact that detected phase will have a 180-degree difference between sum and difference ports when system is aligned with propagating direction of incoming wave. The operation frequency of this system is 2.4 GHz. To employ the high-gain characteristic of planar Yagi-Uda antenna, two vertically polarized antennas are placed in parallel arrangement. Besides, the antennas are in series connection with comparator, amplifier, phase detector, and finally a servo motor controlling the rotation of entire system. Specifically, a passive IQ mixer is utilized as phase-detecting component, and NI LabVIEW DAQ is collaborated for system control and data acquisition. System control includes controlling rotation angle, phase measurement, and signal processing. Last but not least, the experimental demonstration shows that this system can track dynamic signal source instantaneously, which is applicable in missile seeker.
iii
誌謝
當論文撰寫到此頁時,代表著我的碩士生涯即將落幕,兩年來的研究所時光看似漫 長,實則如過眼雲煙般轉瞬即逝,但已在我的人生之中留下許多不可磨滅的奪目光采。 在此我要感謝我的指導教授 黃瑞彬教授,在這兩年來,指導我許多有關於電波領域的 許多專業知識,更教導我人生處事態度,帶我一路勇往直前奮力不倦,也讓我的碩士人 生過得相當充實。 非常感謝實驗室的正元、岳霖、獻東、芳銚以及宜哲五位學長,給予我許多實質上 的幫助,讓我論文得以順利完成。也感謝宏麒、肅哲、派宣、晟瑞等學長,在我碩一時 分享許多研究經驗,讓我有前車之鑑得以參考。接下來要感謝同學晏承、冠中,在碩士 生涯期間常互相勉勵,一起面對所遭遇的種種關卡。更要感謝學弟遠皓、昺旭、科文, 時常幫忙我處理許多研究上的雜事,讓我的實驗可以更順利的完成。此外,我要感謝奇 哲、峻志、亞儒、軒榮、學群、奕心、樞彥、大龍、建融、博丞、怡嘉、弘偉、梓淳、 義傑、仕鈺、祥容、皓宇等人,在我研究所期間常常一起討論研究上的問題,且在我遭 遇困境時能陪伴我一起度過。我更要感謝交大電信 99 級所有同學,讓我在交大的六年 期間得以過得相當充實。最後我要感謝所有在我攻讀碩士期間幫助過我的人,這篇論文 並非我自己獨力完成的,而是有你們的幫忙,我才能完成這篇論文。 最後我要感謝最支持我的家人,我的父母以及怡甄、怡玲兩位姊姊,謝謝你們無條 件的支持我並鼓勵我,且時常幫我分擔碩士期間所遭遇的困境,讓我可以順利完成學 業。iv
目錄
中文摘要 ... i 英文摘要 ... ii 誌謝 ... iii 目錄 ... iv 圖目錄 ... vi 表目錄 ... ix 第一章 緒論 ... 1 1.1 背景及動機 ... 1 1.2 章節大綱 ... 2 第二章 系統理論及特性介紹 ... 3 2.1 單脈衝系統探討 ... 3 2.2 相位比較單脈衝系統探討 ... 5 第三章 相位比較單脈衝系統架構及元件介紹 ... 9 3.1 單脈衝系統架構 ... 9 3.2 天線設計 ... 10 3.3 比較器(comparator)設計 ... 13 3.4 天線和比較器組裝後的量測及探討 ... 17 3.5 RF 放大器介紹 ... 21 3.6 相位偵測器(Phase Detector)設計介紹及分析 ... 23 3.6.1 IQ 混波器與相位偵測器之間的關係分析與探討 ... 23 3.6.2 IQ 混波器元件特性探討 ... 28 3.6.3 IQ 混波器電路量測 ... 33 第四章 系統偵測功能量測及分析 ... 40v 4.1 系統組裝及轉動機制介紹 ... 40 4.2 LabVIEW 做脈衝輸入及後端處理介紹 ... 43 4.3 量測環境與量測結果探討 ... 50 4.4 追蹤系統製作及量測結果探討 ... 60 第五章 系統優缺點探討及結論 ... 65 參考文獻 ... 66
vi
圖目錄
圖 2-1 Σ 及 Δ 場型示意圖 ... 3 圖 2-2 天線經過比較器後產生Σ 及 Δ 場型示意圖 ... 4 圖 2-3 Δ 和 Σ 比值示意圖 ... 5 圖 2-4 相位比較單脈衝系統基本電路圖 ... 6 圖 2-5 天線接收示意圖 ... 6 圖 2-6α
Σ−α
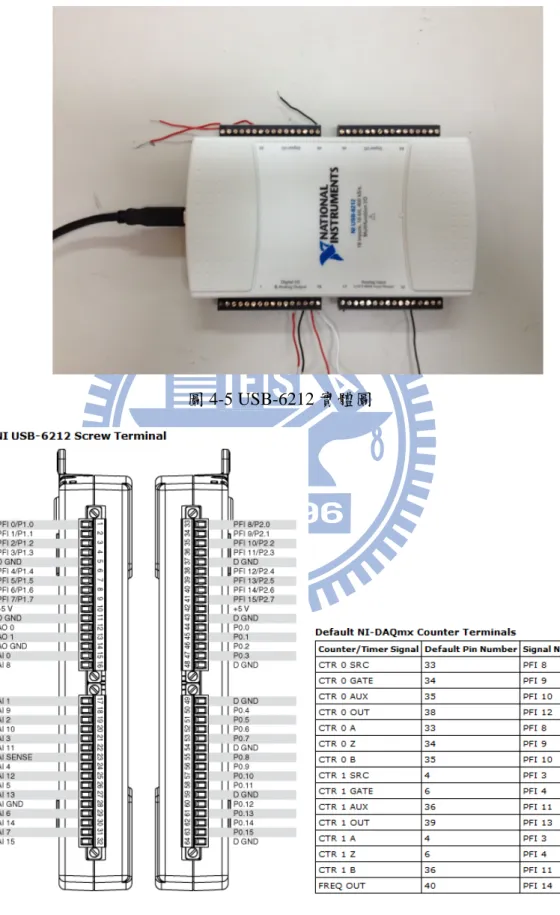
∆對 θ 關係圖 ... 8 圖 3-1 系統架構圖 ... 9 圖 3-2 八木天線電路圖 (a)正面 (b)反面 ... 11 圖 3-3 八木天線實體圖 ... 11 圖 3-4 八木天線的 S11模擬與量測圖 ... 12 圖 3-5 單一個八木天線的場型模擬與量測圖(兩支天線場型) ... 12 圖 3-6 180 度分合波器電路布局圖 ... 13 圖 3-7 180 度分合波器實體圖 ... 14 圖 3-8 180 度分合波器S 、11 S 和21 S 的量測圖 ... 14 31 圖 3-9 180 度分合波器 S44、S24和 S24的量測圖 ... 15 圖 3-10 180 度分合波器 S41量測圖 ... 15 圖 3-11 180 度分合波器 S31和 S34的相位量測圖 ... 16 圖 3-12 180 度分合波器 S21和 S24的相位量測圖 ... 16 圖 3-13 天線排列示意圖(a)旁視圖(b)側視圖 ... 17 圖 3-14 天線和比較器組裝後量測的Σ 及 Δ 場型圖 ... 19 圖 3-15 Σ 及 Δ 場型的遠場相位量測圖 ... 19 圖 3-16 Σ 及 Δ 場型的遠場相位量測相減圖 ... 20 圖 3-17 Σ 場型與其相位疊合比較圖 ... 20vii 圖 3-19 放大器 S 參數量測圖 ... 21 圖 3-20 QLJ-02184014 低雜訊放大器實體圖 ... 22 圖 3-21 QLJ-02184014 放大器 S 參數量測圖 ... 23 圖 3-22 IQ 混波器電路架構圖 ... 24 圖 3-23 ADS 模擬 IQ 混波器示意圖 ... 28 圖 3-24 I 和 Q 端的輸出值和 θ(theta)的關係圖 ... 28 圖 3-25 功率分配器 S 參數大小量測圖 ... 29 圖 3-26 功率分配器 S 參數相位量測圖 ... 30 圖 3-27 直交分合器 S 參數大小量測圖 ... 31 圖 3-28 直交分合器 S 參數相位量測圖 ... 31 圖 3-29 低通濾波器電路圖 ... 32 圖 3-30 低通濾波器 S 參數量測圖 ... 33 圖 3-31 IQ 混波器整體布局圖 ... 34 圖 3-32 兩路相位差產生器電路圖 ... 35 圖 3-33 IQ 混波器 RF 端無衰減器 IQ 曲線量測圖 ... 37 圖 3-34 IQ 混波器 RF 端掛載 10dB 衰減器 IQ 曲線量測圖 ... 37 圖 3-35 IQ 混波器 RF 端掛載 20dB 衰減器 IQ 曲線量測圖 ... 38 圖 3-36 IQ 混波器 RF 端掛載 26dB 衰減器 IQ 曲線量測圖 ... 38 圖 3-37 IQ 混波器電路實體圖 ... 39 圖 4-1 系統整體架構俯視實體圖 ... 40 圖 4-2 系統整體架構側視實體圖 ... 41 圖 4-3 S3003 實體圖 ... 42 圖 4-4 S3003 輸入脈波 duty cycle 與轉動角度關係圖 ... 42 圖 4-5 USB-6212 實體圖 ... 44 圖 4-6 USB-6212 腳位圖 ... 44
viii
圖 4-7 程式流程圖 ... 45
圖 4-8 系統整體 LabVIEW 程式圖—Front Panel 視窗 ... 46
圖 4-9 系統整體 LabVIEW 程式圖—Block Diagram 視窗 ... 47
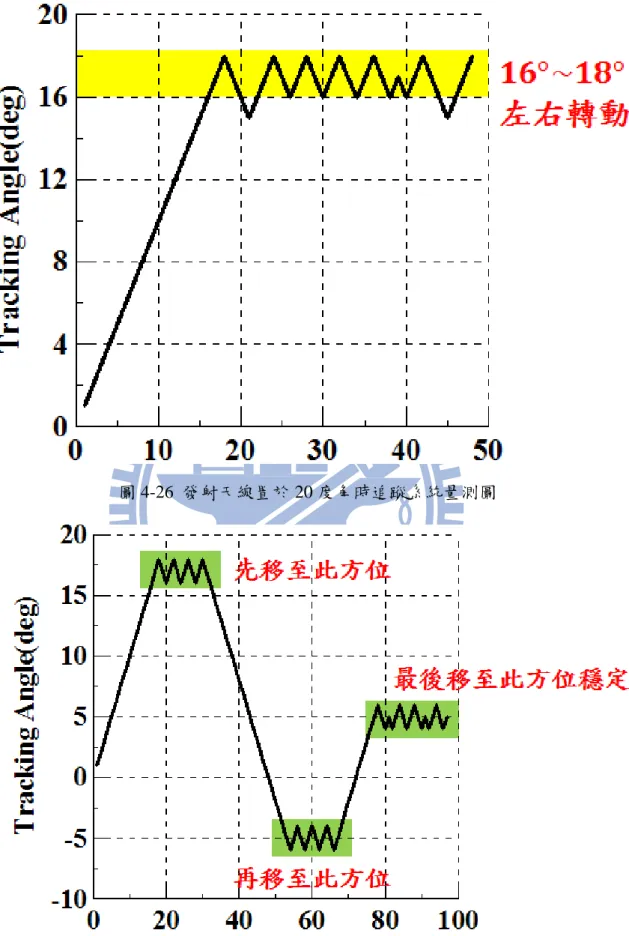
圖 4-10 脈衝操作伺服機 LabVIEW 程式圖 ... 48 圖 4-11 資料讀取及處理 LabVIEW 程式圖 ... 49 圖 4-12 資料運算方塊圖 ... 50 圖 4-13 整體系統組裝後實體圖 ... 50 圖 4-14 系統量測環境示意圖 ... 52 圖 4-15 定位儀 ... 52 圖 4-16 發射天線置於-30 度角時偵測系統量測結果圖(a)IQ 曲線圖(b)相位對應圖 ... 54 圖 4-17 發射天線置於-20 度角時偵測系統量測結果圖(a)IQ 曲線圖(b)相位對應圖 ... 55 圖 4-18 發射天線置於-10 度角時偵測系統量測結果圖(a)IQ 曲線圖(b)相位對應圖 ... 56 圖 4-19 發射天線置於 0 度角時偵測系統量測結果圖(a)IQ 曲線圖(b)相位對應圖... 57 圖 4-20 發射天線置於 10 度角時偵測系統量測結果圖(a)IQ 曲線圖(b)相位對應圖... 58 圖 4-21 發射天線置於 20 度角時偵測系統量測結果圖(a)IQ 曲線圖(b)相位對應圖... 59 圖 4-22 發射天線置於 30 度角時偵測系統量測結果圖(a)IQ 曲線圖(b)相位對應圖... 60 圖 4-23 追蹤系統原理示意圖 ... 61 圖 4-24 追蹤系統 LabVIEW 程式判斷轉動方向圖(a)往正角度方向轉(b)往負角度方向轉 ... 62 圖 4-25 發射天線置於-30 度角時追蹤系統量測圖 ... 62 圖 4-26 發射天線置於 20 度角時追蹤系統量測圖 ... 63 圖 4-27 移動發射天線時追蹤系統量測圖 ... 63
ix
表目錄
表 3-1 天線模擬及量測增益整理表 ... 12 表 3-2 180 度分合波器於 2.4GHz 時 S 參數總整理 ... 17 表 3-3 圖 3-33 至圖 3-36 的 I 及 Q 曲線相位差整理表 ... 39 表 4-1 天線擺放方位與偵測到的方位比較表 ... 601
第一章
緒論
1.1 背景及動機
偵測及追蹤系統已發展行之有年,在許多領域,例如醫學、軍事國防、地質探勘等 都有一定的發展及應用。在眾多追蹤系統中,也已經有各式各樣的方法來偵測各種事物, 例如船上利用聲納來偵測水面以下的情況並進行追蹤,民生安全方面也常利用紅外線偵 測系統來偵測是否有外人入侵以及追蹤其行徑,而在電波領域中,最常見的就是利用雷 達系統來偵測物體方位、距離、以及速度,雷達的應用舉凡在國防上可以追蹤敵方飛彈 或是飛機行徑,以及在民生上可做為汽車防撞裝置。因此偵測系統不論在軍事,或在民 生,都有很大的用途。 單脈衝系統是偵測系統中常見的系統之一,它不論在定位,或是測量距離以及速度 都有許多應用。如 J.C. Wu 等人將其發展成室內定位系統[1],以及 S. Raman 等人做出一 個利用於 W 頻段的單脈衝積體電路雷達系統[2],我們藉由許多參考靈感,設計出一種 利用單脈衝系統的概念,偵測來波方位的偵測系統並進行追蹤,此系統可運用在基地台 的來波偵測,也能夠運用在無線電感測上,在軍事國防上亦可作為飛彈尋標器等設備。 目前最常使用的頻段,舉凡 IEEE802.11b/g,或是 WIFI、藍芽等,頻段範圍都包含 2.4GHz 的頻率,因此將此系統作用在頻段將能做最廣泛的延伸應用,而在基地台或是 其他家中無線路由器,強調的天線涵蓋範圍指的都是地平線方位(azimuth angle),所以 我們也將此系統強調在地平線方位來波偵測,若往後需要三維偵測系統,則可再擴充仰 角方位(elevation angle)來波偵測系統,藉由此系統的發展,就能夠確認來波偵測方位, 因此在基地台天線就能了解該運作哪一個方位的基地台,進而達到省電效果,在家中的 小型基地台也能利用此系統追蹤基地台來波方向,並將手機或是無線電視等無線設備天 線擺放至該處,以確認傳輸品質及確保穩定傳輸。2
1.2 章節大綱
本論文第二章首先介紹系統的基本理論以及特性介紹,本論文中的系統是屬於相位 比較單脈衝系統的類型,因此在此章節中會先介紹一下何謂單脈衝系統,以及單脈衝系 統的種類,接下來就介紹單脈衝種類的其中一種,也是這次研究的系統─相位比較單脈 衝系統,也藉此介紹此系統的理論並探討。第三章就是介紹本研究系統時做所需要的元 件特性介紹,並將重心著墨在天線以及相位偵測器兩部分,並探討各個元件量測結果對 於整個系統的影響。第四章則是將系統組裝、軟體及硬體連接、以及量測環境、量測結 果做詳細介紹,並介紹此系統的應用。第五章則是將全部系統做探討,討論其優點以及 檢討缺點該如何改進,並對論文下最後結論。3
第二章
系統理論及特性介紹
2.1 單脈衝系統探討
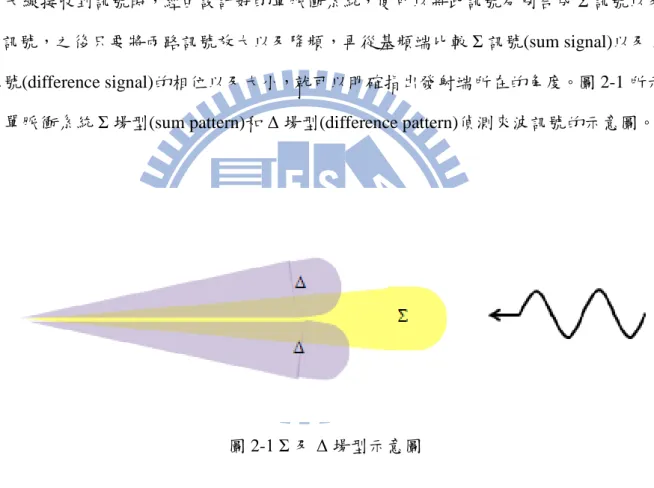
單脈衝(Monopulse)技術已經發展行之有年,而發展至今此技術常被拿來運用在 雷達系統、基地台系統等許多地方。此技術需要兩根以上的天線來做接收訊號的動作。 當天線接收到訊號時,經由設計好的單脈衝系統,便可以將此訊號分別合成Σ 訊號以及 Δ 訊號,之後只要將兩路訊號放大以及降頻,再從基頻端比較 Σ 訊號(sum signal)以及 Δ 訊號(difference signal)的相位以及大小,就可以明確指出發射端所在的角度。圖 2-1 所示 為單脈衝系統Σ 場型(sum pattern)和 Δ 場型(difference pattern)偵測來波訊號的示意圖。圖 2-1 Σ 及 Δ 場型示意圖 因此要設計出單脈衝系統,Σ 訊號以及 Δ 訊號的產生是首要的課題,它產生的方式為: 首先將兩支場型一模一樣的天線排列在一起,此種天線的場型必須為具指向性且盡量為 單波束天線,也就是說天線盡量沒有旁波束的影響,然後將此兩支天線的場型經由比較 器(comparator)後,就能夠產生出Σ 和 Δ 場型。而比較器的機制為:將兩路天線灌入比 較器後,比較器再分別將兩路訊號做相加以及相減的動作,相加後產生Σ 場型,相減後 產生Δ 場型,也就是說,Σ 場型就是將兩路天線直接同相位(in-phase)合成,而 Δ 場型則
4 是將其中一路轉 180 度之後合成,也就是讓兩路天線以相反相位(out-of-phase)合成,圖 2-2 為兩路天線經過比較器後示意圖,由於Δ 場型是經過 180 度角度變化,因此 Δ 場型 相位變化應在 0 度角方位的左邊及右邊有 180 度的變化,因此在圖 2-2 中Δ 場型有標明 (+)和(-)以說明相位變化,有關於相位更詳細的分析於 2-2 節有更多說明。 圖 2-2 天線經過比較器後產生Σ 及 Δ 場型示意圖 從以上說明我們可以帶出一個觀念;當Σ 場型和 Δ 場型相除時,也就是 Δ/Σ,場型 曲線圖由於兩種場型相位和振幅的關係,會呈現 S 曲線,圖 2-3 為此 S 曲線的示意圖。 而一般的單脈衝系統偵測,就是將偵測到的相位和振幅,利用這種曲線當對應表,來指 出來波的方位。 一般的單脈衝系統有三種:
(1) 振幅比較單脈衝系統(Amplitude –Comparison Monopulse System) (2) 相位比較單脈衝系統(Phase-Comparison Monopulse System)
5
(3) 幅相比較單脈衝系統(Amplitude-and-Phase-Comparison Monopulse System)
於此篇論文中比較屬於相位比較單脈衝系統的設計概念,因此於 2.2 節將會簡短介紹相 位比較單脈衝雷達的基本理論探討。 圖 2-3 Δ 和 Σ 比值示意圖
2.2 相位比較單脈衝系統探討
圖 2-4 為相位比較單脈衝系統最常見的電路架構圖,它的構成主要是兩支相同的天 線,經過比較器之後產生Σ 訊號以及 Δ 訊號,接下來再將兩訊號分別灌入到相位偵測器 (Phase detector)中,偵測完相位差後再將結果送進後端做訊號處理,讓使用者可以清楚 觀察是否偵測到來波訊號以及確認來波訊號的方位。 那要如何從比較器輸出的訊號來觀測來波的方位?假設現在有一個波從θ 度過來, 從圖 2-5 得知兩支天線所接收到的波會有sin( )
kd
φ
=
θ
(2-1) 的相位差,其中 k 為波數(wave number),k=2 /π λ
, d 為兩天線間距,θ為接收所在-40
-20
0
20
40
Tracking Angle(deg)
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
ra
ti
o
6
來波的角度,因此我們可以將兩支天線接收到的訊號列成下列數學式
圖 2-4 相位比較單脈衝系統基本電路圖
7
( )
sin(
)
( )
sin(
)
A c B cV t
K
t
V t
K
t
ω
ω
φ
=
=
+
(2-2) c ω 為中心頻率,在此系統我們運用在 2.4GHz 的範圍,也就是說ω =2π‧2.4G。K 是一c 常數,因此我們將這兩個訊號經過比較器之後,輸出端得到的訊號分別為( )
sin(
)
sin(
)
( )
sin(
)
sin(
)
c c c cV t
K
t
K
t
V t
K
t
K
t
ω
ω
φ
ω
ω
φ
Σ ∆=
+
+
=
−
+
(2-3) 經過數學運算之後,我們可以得到 1 1sin
( )
2
cos( ) sin
tan (
)
2
cos
1
sin
( )
2
cos( ) sin
tan (
)
2
cos
1
c cV t
K
t
V t
K
t
φ
ω
φ
φ
φ
ω
φ
φ
− Σ − ∆
=
+
+
=
+
−
(2-4) 假設α
Σ、α
∆分別為V t
Σ( )
、V t
∆( )
的相位參數,則從式 2-4 可以得出 1sin
1sin
tan (
)
tan (
)
cos
1
cos
1
φ
φ
α
α
φ
φ
− − Σ−
∆=
+
−
−
(2-5) 利用 Matlab 我們可以算出式 2-5 的關係如圖 2-6,在此注意圖 2-5 的 x 軸是θ,也就是 來波的角度,經過式子 2-1 將θ和ψ做轉換後再帶入式子 2-5 就可以畫出圖 2-6。由圖 2-6 便可以清楚了解到當有來波時,藉由單脈衝系統的相位偵測,我們可以清楚看到從 比較器出來的相位差會有一劇烈的變化,因此當在接收端螢幕看到在某一個方位波形有 劇烈變化時,便可以猜測出該方位有訊號過來。從上述文字可得出一結果:若我們將一 相位比較單脈衝偵測器置於一能轉動的機台上面,並且讓機台轉動做掃描,當系統偵測 到在某一個方位時,角度變化很劇烈時,就能確定該方位有來波。利用此想法我們就能 做到了單脈衝定位的功能。而本篇論文也就利用此概念來實作並證實此方法的正確性, 並利用其實驗結果研發出具追蹤功能的系統。於第三章會更詳細介紹整個系統的架構及 內部元件,並將實驗的相關事項及結果放置於第四章。8 圖 2-6
α
Σ−α
∆對θ關係圖 -100 -80 -60 -40 -20 0 20 40 60 80 100 -100 -80 -60 -40 -20 0 20 40 60 80 100 Tracking angle(deg) phas e di ff er enc e( deg)9
第三章
相位比較單脈衝系統架構及元件介紹
3.1 單脈衝系統架構
圖 3-1 為本論文研究的系統架構圖,此系統頻率作用於 2.4GHz,而架構主要分成兩個部 分:第一部分為天線將訊號接受進來經過比較器合成Σ 訊號以及 Δ 訊號;第二部分為將 Σ 訊號和 Δ 訊號分別經過放大器後與訊號產生器產生的訊號分別進入相位檢測器以測量 Σ 訊號和 Δ 訊號對於訊號產生器的訊號的相位差。訊號產生器利用功率分配器將訊號分 為兩路個別進入信位偵測器,而兩路相位幾乎同相位,因此藉由訊號產生器的相位當作 基準相位就能測出Σ 訊號和 Δ 訊號的相位差。利用最後進入微電腦系統來做訊號處理以 及顯示波形。為了要讓相位偵測器能驅動,因此輸入進去的本地震盪器功率必須達到某 一大小,此相位偵測器方能被驅動,而相位偵測器若兩端輸入訊號功率差距越大,則量 測出來之相位差誤差亦會越大,故我們希望Σ和Δ輸入至相位偵測器的功率和本地震盪 器之功率差能夠越小越好,因此量測的距離以及放大器的參數特性都必須經過謹慎選擇, 而量測距離於往後的量測環境中將會討論到。因為在偵測到來波時,所在的方位接收到 圖 3-1 系統架構圖10 的Σ 訊號和 Δ 訊號會有大約 20dBm 的功率差,也就是 Σ 訊號的功率會比 Δ 訊號的功率 高大約 20dBm,因此為了能夠拉近兩個訊號功率的差距,所以在Δ 訊號端又增加了一 級放大器,以拉近Σ 訊號的功率和 Δ 訊號的功率之間的差距。
3.2 天線設計
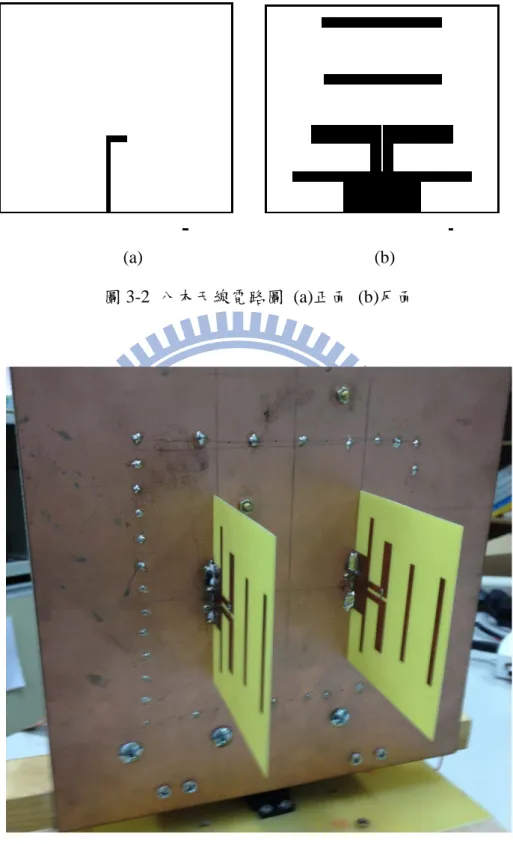
於之前單脈衝系統介紹中,提及到設計一般單脈衝系統第一步驟就是先利用天線和 比較器的組合產生一個出Σ和Δ場型後,算出Δ場型和Σ場型的比值,產生出 S 曲線, 再利用來波的振幅和相位與 S 曲線做相對應,就可以偵測出來波所在的方位角。因此天 線和比較器的設計是整個單脈衝系統的重點之一。首先天線必須選擇具指向性的天線, 當天線的波束寬度(Beamwidth)越窄,則偵測到來波的解析度會越好,因為角度轉換的斜 率會越陡。而天線的場型中,相位參數不能太過複雜,若除了Δ場型中偵測到來波所造 成的 180 度角度劇烈變化以外, Σ和Δ場型的相位還有其他地方會有劇烈變化,則會 造成來波辨識方位不清以及誤判,因此所選天線應為場型簡單,單一主波束且旁波辦的 增益極小,且具有指向性的天線。 鑒於以上的考量,天線我們選用平面式八木宇田天線(Yagi-Uda Antenna),八木天線 具有指向性,且旁波瓣較小,正好符合我們實驗所需的天線規格。圖 3-2 為所使用的八 木天線正面及反面圖形,圖 3-3 為此天線的實體圖,我們使用的板材為εr=4.3 的 FR4 板,其板材厚度為 0.6mm。而圖 3-4 為八木天線的 S11量測圖,可看出他在操作頻率 2.4GHz 時兩支天線的 S11都在-10dBm 以下。圖 3-5 為八木天線的場型模擬及量測圖,表 3-1 為 其模擬及量測的增益整理,從表 3-1 中可看到在 2.4GHz 時此天線量測到的增益能達到 6.6dB。11
(a) (b) 圖 3-2 八木天線電路圖 (a)正面 (b)反面
12
1
1.5
2
2.5
3
Frequency(GHz)
-50
-40
-30
-20
-10
0
S
1
1
(d
B
)
Simulation Measure 圖 3-4 八木天線的 S11模擬與量測圖 0 45 90 135 180 225 270 315 -30 -20 -10 0 10 Measure-Antenna 1 Measure-Antenna 2 Simulation 圖 3-5 單一個八木天線的場型模擬與量測圖(兩支天線場型) 天線模擬增益 天線量測增益 9.1dB 6.6dB 表 3-1 天線模擬及量測增益整理表13
3.3 比較器(comparator)設計
比較器我們選擇 180 度分合波器(rat-race ring),圖 3-6 為 180 度分合波器的電路布 局圖,180 度分合波器的好處是它既有將兩路訊號做相加和相減的基本功能以外,它的 兩個 input 端(埠 1 和埠 4)以及Σ 和 Δ 端 (埠 3 和埠 42 各自的隔離度也不錯,因此很適 合拿來做這個系統的比較器。圖 3-7 為 180 度分合波器實體圖。阻抗 Zo=50Ω。當兩支 天線分別接上埠 1 與埠 4,便可從其他兩埠取得Σ (兩天線在Σ埠同相位,埠 3)與Δ (兩 天線在Δ埠反相位,埠 2)的訊號。因為這是對稱的架構,所以訊號強度比較不會有不平 衡的的情形產生。 圖 3-8 以及圖 3-9 分別為 180 度分合波器對應到不同輸入端時 S 參數的量測圖,因 為這個系統是作用於 2.4GHz,所以 S11、以及 S44在 2.4GHz 時應要低於-10dB,而 S21、 S31、S24、S34大致座落在 4dBm~5dBm,大概比理想值 3dBm 少了 1~2dBm,原因應為板 材 FR4 的損耗太大所造成的。圖 3-10 所示為 S41量測圖,此圖提供了隔離度的數據,圖 中在 2.4GHz 時隔離度落在-40dBm 以下,所以隔離度還可以接受。圖 3-11 為 S21和 S31 的相位量測圖,理論上 S31和 S34在 2.4GHz 時應為同相位,埠 1 輸出才有加總的功用。 圖 3-12 為 S24和 S34的相位量測圖,同樣地 S24和 S34在 2.4GHz 時應要有 180 度的相位 差,埠 2 輸出才會有相減的功用。表 3-2 為 180 度分合波器各個參數在 2.4GHz 時的數 值總整理。 圖 3-6 180 度分合波器電路布局圖14 圖 3-7 180 度分合波器實體圖
2
2.2
2.4
2.6
2.8
3
Frequency(GHz)
-40
-30
-20
-10
0
S
p
a
ra
m
et
er
s(
d
B
)
S11 S21 S31 圖 3-8 180 度分合波器S 、11 S 和21 S 的量測圖 3115
2
2.2
2.4
2.6
2.8
3
Frequency(GHz)
-40
-30
-20
-10
0
S
P
a
ra
m
eter
s(d
B)
S44 S24 S34 圖 3-9 180 度分合波器 S44、S24和 S24的量測圖 圖 3-10 180 度分合波器 S41量測圖16
2
2.2
2.4
2.6
2.8
3
Frequency(GHz)
-180
-90
0
90
180
P
h
a
se
(d
eg
)
S
31S
34 圖 3-11 180 度分合波器 S31和 S34的相位量測圖2
2.2
2.4
2.6
2.8
3
Frequency(GHz)
-180
-90
0
90
180
P
ha
se
(d
eg
)
S
21S
24 圖 3-12 180 度分合波器 S21和 S24的相位量測圖17 S 參數 S11 S21 S31 S44 S24 S34 S32 大小(dB) -21.53 -4.63 -4.24 -21.91 -4.79 -4.41 -42.67 S 參數 S31 S34 S21 S24 相位(deg) -25.63 -26.85 -29.53 148.82 表 3-2 180 度分合波器於 2.4GHz 時 S 參數總整理
3.4 天線和比較器組裝後的量測及探討
而當兩個天線排列在一起後再加比較器就可以先從遠場量測室量測Σ和Δ的場型 是否跟前述類似。圖 3-13 為天線排列示意圖,其中兩支天線的間距為 d=λ/2,在 2.4G 時波長λ=125mm,所以 d=62.5mm,至於極化方向則為垂直極化。 (a) (b) 圖 3-13 天線排列示意圖(a)旁視圖(b)側視圖 圖 3-14 就是天線和比較器組裝後量測的遠場Σ 及 Δ 場型圖。從圖 3-14 可發現到, Σ 及 Δ 場型跟圖 2-2 所說的理想場型類似,只是 Δ 場型有大約兩度的偏移,這兩度的偏 移將會在量測時造成大約兩度的方位誤差,而這誤差將會在後端處理校正回來。而在本 論文中,相位變化是我們關心的現象,圖 3-15 為遠場量測到Σ 及 Δ 場型的相位,從此 圖可以看到,確實在-2 度角的時候Δ 場型的相位會有急遽變化,因此從這場型圖可以看 d=62.5mm18 出當此方位有來波時,Δ 場型的相位的確會有急遽變化。而之後量測時所經過的相位偵 測器它測量到的相位差是將Σ 訊號的相位和 Δ 訊號的相位相減,因此若我們將圖 3-15 的遠場Σ 以及 Δ 場型的相位相減,減出來的波形可能就是到時候實驗時相位偵測器所量 到的波形。圖 3-16 所顯示的就是Σ 和 Δ 場型的相位相減之後的結果,但是從這圖中我 們發現到,從-90 度到 90 度的量測範圍內除了在-2 度相位差有劇烈變化,在大約-70 度 和+65 度處它似乎也有有點明顯的劇烈變化,而這個變化恐怕將會往後的偵測造成誤判 的影響,而這兩個方位角度它的劇烈變化是怎麼產生的?回頭看圖 3-15,可以發現Δ 場 型的相位除了-2 度處有劇烈變化外,在-90 度到 90 度中的其他地方都沒有明顯劇烈變化, 反之,從Σ 場型的相位來看,大約在-70 度和+65 度有劇烈變化,但是詳細觀察之後, 發現+65 度附近的劇烈變化處是因為相位抵達到-180 度後轉折到+180 度,所以此處的劇 烈變化原因是因為相位轉折,而不是真正的劇烈變化,因此我們可以忽略+65 度部分的 劇烈變化,但是-70 度的劇烈變化是真實強況它會有相位劇烈變化,因此我們可以證實 說這兩個方位角的相位劇烈變化是Σ 場型所提供的,但+65 度是假的,所以真正只有-70 度的變化需要考慮。那Σ 場型的劇烈變化變化是怎麼來的?我們將 Σ 場型以及其相位圖 放在一起做比較,圖 3-17 就是疊起來後的比較,可以發現到它的變化方位角幾乎跟Σ 場型的旁波瓣方位相符合,從該圖所呈現的現象中我們猜測Σ 場型的旁波瓣也會造成相 位差的劇烈變化,因此旁波瓣的消除可能有助於偵測相位的準確度,而以上的問題將是 未來需要克服的其中一個難關。
19 圖 3-14 天線和比較器組裝後量測的Σ 及 Δ 場型圖
-180
-90
0
90
180
Scanning Angle(deg)
-180
-90
0
90
180
P
h
a
se
(d
eg
)
Sum
Difference
圖 3-15 Σ 及 Δ 場型的遠場相位量測圖20 圖 3-16 Σ 及 Δ 場型的遠場相位量測相減圖
-180
-90
0
90
180
Scanning Angle(deg)
-60
-40
-20
0
20
P
a
tt
er
n
-180
-90
0
90
180
P
h
a
se
(d
eg
)
Pattern Phase 圖 3-17 Σ 場型與其相位疊合比較圖21
3.5 RF 放大器介紹
放大器的個數於前面 2.2 單脈衝系統架構處已經有探討原因,由於在我們所架設的 量測距離所測量到的Σ 訊號在目標來波所在的方位上功率大約-15dBm,而Δ訊號功率 約為-36dBm,為了降低偵測誤差,所以在Σ 端和Δ端了一級放大器以縮小和本地震盪 器的功率差。此模組的輸出 1dB 點(Output 1dB point)為+16dB,此增益已超越了相位偵 測器饋入到Σ 訊號所需要的能量範圍,因此很適合放在最後一級來驅動相位偵測器。圖 3-19 為此放大器的 S 參數,從圖 3-19 可以看到在 2.4GHz 時所量測到的增益約為 25dB。2
2.2
2.4
2.6
2.8
3
Frequency(GHz)
-60
-40
-20
0
20
40
S
P
a
ra
m
eter
s(d
B)
S11 S21 S12 S22 圖 3-19 放大器 S 參數量測圖 由於要讓Σ 訊號和 Δ 訊號在偵測方位上灌入相位偵測器趨近於一樣,因此我們在 Δ22 端多放一級放大器。我們選用的放大器為 Quinstar 的 QLJ-02184014-FD 的低雜訊放大器, 因為此放大器的 Output P1dB為 0.7dBm,所以須放置在前級以讓它的輸出功率小於 0.7dBm,而此模組為低雜訊放大器,因此置於前級也可以減少 noise 的影響。圖 3-20 為 QLJ-02184014 放大器實體圖,而圖 3-21 為此放大器的 S 參數,從圖 3-21 可以看出在 2.4GHz 時所量測到的增益約為 14dBm,而在偵測方位上Σ 訊號和 Δ 訊號的能量差大約 20dBm,因此藉由此放大器可以拉近它們之間的能量差,也可以降低相位偵測器輸出相 位差偵測時的誤差。 圖 3-20 QLJ-02184014 低雜訊放大器實體圖
23
2
2.2
2.4
2.6
2.8
3
Frequency(GHz)
-80
-60
-40
-20
0
20
S
P
a
ra
m
et
er
s(
d
B)
S11 S21 S12 S22 圖 3-21 QLJ-02184014 放大器 S 參數量測圖3.6 相位偵測器(Phase Detector)設計介紹及分析
對於相位比較單脈衝系統來說,相位偵測器是後端偵測系統中最為重要的一個元件, 因為相位偵測的結果直接影響到此追蹤系統是否精準,因此在此章節會有較多的探討。 相位偵測器我們選用了自製的 IQ 混波器(IQ mixer),而 IQ 混波器內各個部分將於以下 的小章節一一介紹。3.6.1 IQ 混波器與相位偵測器之間的關係分析與探討
24
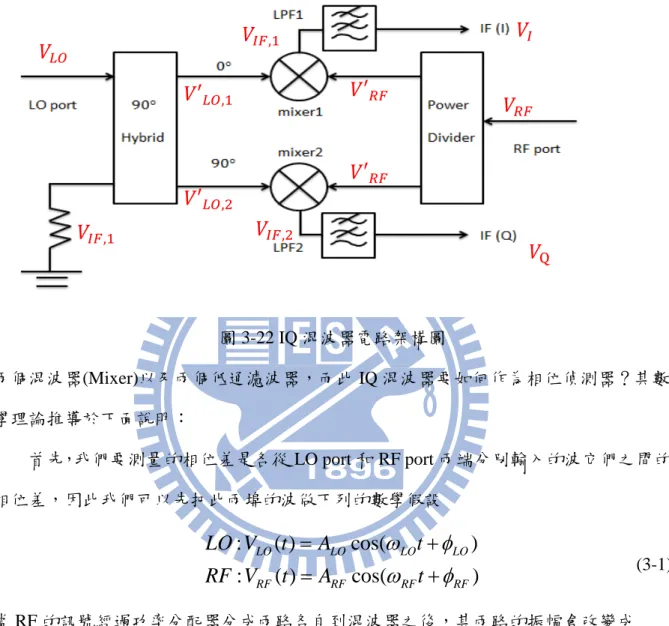
首先先介紹 IQ 混波器的架構圖,圖 3-22 為所使用的 IQ 混波器架構圖,此 IQ 混波 器包含一功率分配器(Power Divider)、一直交分合波器(Quadrature Hybrid, 90⁰ Hybrid),
圖 3-22 IQ 混波器電路架構圖 兩個混波器(Mixer)以及兩個低通濾波器,而此 IQ 混波器要如何作為相位偵測器?其數 學理論推導於下面說明: 首先,我們要測量的相位差是各從 LO port 和 RF port 兩端分別輸入的波它們之間的 相位差,因此我們可以先把此兩埠的波做下列的數學假設
:
( )
cos(
)
:
( )
cos(
)
LO LO LO LO RF RF RF RFLO V
t
A
t
RF V
t
A
t
ω
φ
ω
φ
=
+
=
+
(3-1) 當 RF 的訊號經過功率分配器分成兩路各自到混波器之後,其兩路的振幅會改變成 / 2 LO A ,而相位則會一起減少同樣相位,在此我們假設 RF 的訊號經過功率分配器到 各自的混波器前時的相位改變成φRF',也就是說到混波器前的 RF 訊號數學式已改變成( )
cos(
')
2
RF RF RF RFA
V
t
=
ω
t
+
φ
(3-2) 而 LO 訊號則是會先經過一個直交分合器,直交分合器有四個 port,分別是兩個輸入端 和兩個輸出端,因為我們只需要一個輸入端輸入訊號,再從兩個輸出訊號產生出功率大𝑉
𝐿𝐿𝑉
𝑅𝑅𝑉
𝐼𝑅,1𝑉′
𝐿𝐿,2𝑉′
𝑅𝑅𝑉′
𝑅𝑅𝑉′
𝐿𝐿,1𝑉
𝐼𝑅,2𝑉
𝐼𝑉
Q𝑉
𝐼𝑅,125 小相近,但相位相差 90 度的兩個波,因此另外一個輸入端我們就用 50Ω 的負載使其末 端匹配。而當 LO 訊號經過直交分合器之後,再到混波器之前,相位也會改變,只是因 為直交分合器讓此兩路有 90 度的相位差,因此假設其中一路到混波器之前的相位以改 變成φLO',則另外一路的相位我們就可以假設成φ − °,而兩路的振幅也因為分波的LO' 90 關係,所以會改變成ALO/ 2,因此 LO 的兩路訊號到混波器前的數學式已各自改變成 ,1 ,2
( )
cos(
')
2
( )
cos(
' 90)
sin(
')
2
2
LO LO LO LO LO LO LO LO LO LO LOA
V
t
t
A
A
V
t
t
t
ω
φ
ω
φ
ω
φ
=
+
=
+
−
=
+
(3-3) 接下來 RF 和 LO 分波後的訊號會各自跟兩個混波器混波,而混波的數學式可以表示成 兩路訊號相乘,但是混波器本身有轉換損耗(Conversion Loss)或是轉換增益(Conversion Gain)的參數,端看此混波器為被動電路混波器抑或是主動電路混波器,而且有其他像是 路徑上的損耗等因素,這些因素就會影響到經過混波後輸出的振幅,而在此為求兩路能 量一致,因此就是盡量讓電路兩路的路徑能夠相同長度,或是要求電路兩路對稱,以上 這些影響到振幅的因素我們用 K 這個常數來表示,並且假設今天兩路訊號大小一樣,因 此振幅影響參數皆為 K。而兩路訊號經過混波器之後從 IF 輸出各自的數學式我們可以 表示成 ,1 ,2cos(
') cos(
')
cos(
') sin(
')
IF RF LO RF RF LO LO IF RF LO RF RF LO LOV
KA A
t
t
V
KA A
t
t
ω
φ
ω
φ
ω
φ
ω
φ
=
+
+
=
+
+
(3-4) 而相乘後原本分母的常數 2 也一致併入 K 內。而式 3-4 經過三角函數轉換後經過運算就 下列式子相等 ,1 ,2 [cos( ' ') cos( ' ')] 2 [cos( ' ') sin( ' ')] 2 IF RF LO RF LO LO RF LO RF LO RF IF RF LO RF LO LO RF LO RF LO RF K V A A t t t t K V A A t t t tω
ω
φ
φ
ω
ω
φ
φ
ω
ω
φ
φ
ω
ω
φ
φ
= + + + + − + − = + + + + − + − (3-5) 在此,提出一個假設,若原本 RF 輸入訊號和 LO 輸入訊號的頻率相同,也就是26 RF LO C
ω
=
ω
=
ω
(3-6) 則式 3-5 就可以寫成 ,1 ,2[cos(2
'
') cos(
'
')]
2
[cos(2
'
') sin(
'
')]
2
IF RF LO C LO RF LO RF IF RF LO C LO RF LO RFK
V
A A
t
K
V
A A
t
ω
φ
φ
φ
φ
ω
φ
φ
φ
φ
=
+
+
+
−
=
+
+
+
−
(3-7) 從式 3-7 可以看出,兩路 IF 端的相位項內有原本 RF 訊號和 LO 訊號的相位差的資訊存 在,這資訊也就是我們所追求的目標,因此我們只需要將 2ω 處的功率濾掉,整個數學C 式子就只剩下兩路相位差以及兩路振幅的資訊。所以我們只需要設計一個能濾掉 2ω 的C 個低通濾波器(Low Pass Filter, LPF) ,就能解決這一問題。但是電路上往往會有耦合的 情況產生,因此電路上可能還會有其他頻率的訊號,尤其是ω 、3C ω 、4C ω 等倍頻,而C 我們所需要的資訊沒有頻率項,也就是說它可以看成一直流輸出,因此我們只需要用一 般低頻的低通濾波器就可以解決上述的問題。而從濾波器出來的兩路訊號經過低通濾波 器後的數學式就可以表示成 , ,1 , ,2[cos(
'
')]
2
[sin(
'
')]
2
IF LPF RF LO LO RF IF LPF RF LO LO RFK
V
A A
K
V
A A
φ
φ
φ
φ
=
−
=
−
(3-8) 假設 VI輸出端為 I 端,VQ輸出端為 Q 端,則此電路效果就跟一般市售的 IQ 混波器類 似,只是多了低通濾波器。 要如何將相位差的資訊從式 3-8 萃取出來?此時只能借助後端處理的幫忙了。若我 們將 Q 端的訊號和 I 端的訊號相除,則可以寫成下式[sin(
'
')]
2
tan(
'
')
[cos(
'
')]
2
RF LO LO RF Q LO RF I RF LO LO RFK
A A
V
K
V
A A
φ
φ
φ
φ
φ
φ
−
=
=
−
−
(3-9) 相除之後結果可以從式 3-9 看出,此時振幅因為假設相同,因此相除後振幅的函數已消27 失,所以我們只需要在後端處理上做下列數學運算就能得到相位差 1
'
'
tan (
Q)
LO RF IV
V
φ
−
φ
=
− (3-10) 若從功率分配器以及直交分合器的輸出端到混波器的輸入端 RF 訊號和 LO 訊號所走的 路徑一樣,則'
'
LO RF LO RFφ
−
φ
=
φ
−
φ
= ∆
φ
(3-11) 因此藉由這種自製的 IQ 混波器電路,便可以判斷從 RF 端以及從 LO 端饋入訊號的相位 差,所以此電路就可以拿來當相位偵測器。 那要如何用模擬驗證此理論?圖 3-23 為利用 ADS 軟體模擬 IQ 混波器的電路圖。 從圖中我們輸入一個訊號先到功率分配器,再利用功率分配器分出來的兩個訊號分別灌 入 IQ 混波器的 LO 端和 RF 端,而因為我們要模擬 LO 端和 RF 端訊號的相位差,所以 在灌入 RF 端之前先設一條理想傳輸線,其控制參數有包含電氣長度(Electrical Length)θ, 而此電氣長度θ 的值就可以視為 RF 和 LO 之間相位差的值,因此只要將 θ 參數設為變 數,就可以繪出 I 和 Q 端的輸出值和θ 的關係圖。圖 3-24 為 I 和 Q 端的輸出值和 θ(theta) 的關係圖,從此圖中能看出 I 和 Q 的輸出確實和式 3-8 所示呈現出 cos 波和 sin 波的形 式,因此此理論有一定的可行性。28 圖 3-23 ADS 模擬 IQ 混波器示意圖 圖 3-24 I 和 Q 端的輸出值和θ(theta)的關係圖 此 IQ 混波器需要的元件有直交分合器、功率分配器,混波器,以及濾波器,於下 小節將探討各元件特性。
3.6.2 IQ 混波器元件特性探討
IQ 混波器電路所使用的板材為εr=4.3 的 FR4 板,其板材厚度為 0.6mm。為為求 IQ 混波器的電路面積能縮小,因此每個元件都盡量直接使用已有封裝製程的 IC,尤其是直 交分合器、功率分配器,混波器,若使用一般微波電路上的威爾金森功率分波器、或是 電路板式直交分合器等等電路,則在 FR4 基板所需要的面積極大,不符合縮小化的目標, 因此在這些元件中,直交分合器、功率分配器,混波器都將使用 chip 來替代。功率分配器所使用的 chip 其型號為 ACX PD1608-E2R4BAA,圖 3-25 及圖 3-26 為 其 S 參數大小及相位曲線圖。從圖 3-25 能發現到它的 S11於 2.4GHz 時大約為-17dBm, 50 100 150 200 250 300 350 0 400 -0.4 -0.2 0.0 0.2 0.4 -0.6 0.6 theta I1 Q1
29 S32則約-23dBm,隔離度還不錯,而 S21、S31分別為-3.1dBm 以及-3.7dBm,顯示出兩路 有約 0.6dBm 的功率差,而從圖 3-26 可看出兩路相位幾乎趨近於同相位(in phase),因此 在 RF 訊號分波上相位誤差應極低。
2
2.2
2.4
2.6
2.8
3
Frequency(GHz)
-40
-30
-20
-10
0
S
P
a
ra
m
et
er
s(
d
B
)
S
11S
21S
31S
32 圖 3-25 功率分配器 S 參數大小量測圖30
2
2.2
2.4
2.6
2.8
3
Frequency(GHz)
-180
-90
0
90
180
P
h
a
se
(d
eg
)
S
21S
31 圖 3-26 功率分配器 S 參數相位量測圖直交分合器元件我們則選用了 MAG. Layers 的 LTC-OM1O-OG4S1-A1,此元件有兩 個輸入以及兩個輸出,用法跟一般的直交分合器相同,因為現在只需要用到一個輸入, 因此另一個輸入端我們加上 50Ω 負載使其匹配。圖 3-27 為其 S 參數大小量測圖,圖 3-27 為其 S 參數相位量測圖,從圖 3-28 中能發現到它的 S11於 2.4GHz 時大約為-18dBm,而
S21、S31皆大約為-3.4dBm,兩路輸出功率差幾乎一模一樣,從圖 3-28 中可看見 S21相位
31
2
2.2
2.4
2.6
2.8
3
Frequency(GHz)
-40
-30
-20
-10
0
S
P
a
ra
m
et
er
s(
d
B
)
S11 S21 S31 圖 3-27 直交分合器 S 參數大小量測圖2
2.2
2.4
2.6
2.8
3
Frequency(GHz)
-180
-90
0
90
180
P
h
a
se
(d
eg
)
S
21S
31 圖 3-28 直交分合器 S 參數相位量測圖32 混波器則選用了 Hittite 的 HMC213MS8,此顆 IC 混波器是使用了雙平衡式混波器 被動電路(Double-Balanced Mixer)。而之前所提及的Σ 和Δ功率必須到達一定的標準, 相位偵測器才能驅動的由來,就是因為需要有足夠的功率灌入此混波器,它方能操作, 因此本系統目前發展至今,其中一個缺點就是需要接收到相當的功率以上,它才能操作, 因此來波距離的遠近也是必須考慮的因素,而這個因素仍有待解決。 低通濾波器是本電路最後一端的元件,在之前提及到由於從混波器出來的訊號除了 有我們需要的 DC 成分以外,它仍然有 2ω 頻率,以及C ω 、3C ω 、4C ω 等倍頻存在,在C 這次的系統中就是除了有 4.8GHz 頻率以外,仍然有 2.4GHz、7.2GHz、9.6GHz 等倍頻 存在,因此最理想的放大器應為只要剩下直流訊號,而不要有交流訊號即可,因此我們 可使用集總元件(Lumped Element),且低通濾波器單位等級只需 MHz 即可。圖 3-29 是 低通濾波器的電路圖,每一個元件皆是使用 0603 的 SMD 電容及電感。圖 3-30 是低通 濾波器 S 參數量測圖,0.5dB 點大約落在 29MHz,3dB 點大約落在 60MHz,因此這是極 低頻的低通濾波器,與我們所需要的濾波器相符合。 圖 3-29 低通濾波器電路圖
68nH
150nH
68nH
68pF
68pF
port1
port2
33
0
20
40
60
80
100
Frequency(MHz)
-25
-20
-15
-10
-5
0
S
Pa
ram
et
er
s(
dB)
S
11S
21圖 3-30 低通濾波器 S 參數量測圖
3.6.3 IQ 混波器電路量測
接下來將電路布局圖畫出後,就把布局圖拿去製作電路板,製作完後把各個元件焊 上去,IQ 混波器實做就完成了。圖 3-31 為 IQ 混波器布局圖,連同各個元件的位置一致 標明在圖上。IQ 混波器的測試方法概念與前述圖 3-23 利用 ADS 模擬的方式相同,也就 是利用一功率分配器將訊號產生器產生的訊號分成兩份,並各自接到 LO 端以及 RF 端, 而 RF 端前面再加一段延遲線(Phase Delay Line)讓 RF 和 LO 產生相位差。在這裡要注意 一點,就是從功率分配器的輸出端到 LO 輸入端與功率分配器的輸出端到延遲線的輸入 端相位必須相近,也就是說需要兩條電氣長度幾乎一樣的傳輸線分別連接這兩端,才不 會造成延遲線以外的其他地方有相位差。34 圖 3-31 IQ 混波器整體布局圖 但是延遲線要如何產生?也就是說要如何做出各種相位差變化的線出來?在此有 幾種方法:第一種是找出各種相位差的線,但是必須要在 0~360 度相位差內都存在這些 線,否則將有些相位差測量不到,或是洗出各種長度的微帶線,相位差間距可以自行決 定,但是必須要涵蓋到 0~360 度。第二種方法就是用轉接頭去串接,串接個數不同相位 差也會不同,且會有一定間距,因此若每個轉接頭提供的相位差很小,就可以產生出許 多間距,若轉接頭相位差很大,導致 0~360 之間的量測數據不夠,就用別種型號的轉接 頭跟原本的轉接頭做混合,這樣就可以產生出更多的相位差數據出來。第三種方法,也 是本實驗用的方法,就是利用 DDS (Direct Digital Synthesizer)配合升頻電路輸出帶有相 位差的兩路訊號。
DDS 是利用電腦控制,在電腦內輸入輸出兩路的相位差,它就能藉由 DDS 將輸入 進去的相位差傳到混波器電路內,因此也不需要使用訊號產生器以及功率分配器,直接 講這兩路的訊號分別灌入 RF 端和 LO 端內即可。但是 DDS 是低頻訊號,它的訊號範圍
35 只有 100MHz~300MHz,因此需要利用混波器將頻率提高到 2.4GHz。圖 3-32 為整體相 位差產生器電路圖,我們設定 DDS 輸出的頻率為 200MHz,再各自經過放大器放大後, 進入混波器的 IF 端。但混波器還需要本地震盪器(Local Oscillator)饋入到 LO 端方能升 頻,因此我們利用訊號產生器產生 LO 所需要頻率的波,由於我們需要 2.4GHz 的輸出, 因此訊號產生器必須產生 2.2GHz 的波進到混波器,RF 輸出端再經過帶通濾波器 (Band-Pass Filter)就能產生 2.4GHz 的波。由於 DDS 產生的相位差經過升頻後相位差仍 舊不變,因此就可以利用此電路系統提供相位差,測量 IQ 混波器的特性。 圖 3-32 兩路相位差產生器電路圖 運用 DDS 的方法,只要在電腦上輸入 0~360 度的相位差,就可以在輸出端量測出 I 和 Q 的曲線圖。量測之前,要先利用頻譜分析儀(Spectrum Analyzer)測量進入到混波器 LO 端和 RF 端之前的功率大小,以確保它足以讓混波器達到操作範圍,並確保它的功 率不會高到足以將整個電路燒壞。而 I 和 Q 端的輸出訊號由於只剩下直流訊號,因此用 一般的示波器即能看直流到訊號大小,然後每調整一度後記錄量測到的 I 和 Q 值,待 0~360 度都量完後,就可以將所記錄的值繪出相位差對 I 或 Q 電壓值的曲線圖。IQ 混波 器上的混波器從規格書上面得知混波器的 LO 端在灌入+10dBm 功率時能讓混波器最穩 定,因此量測 I 和 Q 的曲線圖前必須確認到 LO 端的功率是否能讓整顆混波器驅動。 將所有元件依照圖 3-32 電路圖所示放置好後,用頻譜分析儀量測在 IQ 混波器的 LO
36 端功率大約為+10dBm 附近,這符合規格書混波器的驅動範圍。圖 3-33 (a)所示即為 IQ 混波器當 LO 端功率為 11dBm、RF 端功率為 10.1dBm 時的量測圖,從圖中可以看到 I 和 Q 各自呈現類似 cosine 以及 sine 弦波的曲線,但兩條曲線相位差並不完全呈現 90 度, 可是當我分別改變饋入到 RF 端的功率時,情況就有些許不同了。圖 3-34 到圖 3-36 為 分別在 RF 端掛載不同值的衰減器時量測圖,當我掛載 10dB 衰減器時,如圖 3-34,此 時 RF 功率為-0.7dBm,這時候 I 和 Q 曲線相差似乎離 90 度很多,亦能發現到,兩條曲 線正數端的峰值和負數端的峰值不一樣,也就是說它很像是一種波型失真的現象,而它 們在 x 軸方向也有一點相位偏移(Phase Shift),因此相位差 0 度時的量測結果不是 0 度。 圖 3-35 為 RF 端掛載 20dBm 量測圖,圖 3-36 為 RF 端掛載 26dBm 量測圖,當掛載更高 衰減值的衰減器時,就沒有直流訊號產生了。從上述實驗結果得知,當 RF 和 LO 兩端 功率差越多時,失真問題就越嚴重,表 3-3 為圖 3-33 至圖 3-36 的 I 及 Q 曲線相位差和 相位差誤差的整理表。因此若要盡量減低失真現象的影響,我們必須盡量讓 IQ 混波器 的 RF 端以及 LO 端功率趨近一樣,這也就是前面所述在輸入端兩端各掛載不同放大器 數目,以達到在來波方位角上,這兩端功率能趨近一致,而沒有如此懸殊的功率差的關 係。至於轉換後實際相位差與轉換後的相位差的圖會有偏移問題的解決方法,就是最後 量測完後,看角度大概偏移多少,再利用程式將偏移量消除即可。當所有元件特性都已 確定之後,就可以將整個系統組裝起來做功能量測了。此部分將於第四章做介紹。圖 3-37 為 IQ 混波器的電路實體圖。
37
0
90
180
270
360
phase difference(deg)
-600
-400
-200
0
200
400
600
m
ea
su
re
d
v
o
lt
ag
e(
m
V
)
I
Q
RF:10.1dBm LO:11dBm
圖 3-33 IQ 混波器 RF 端無衰減器 IQ 曲線量測圖0
90
180
270
360
phase difference(deg)
-200
-100
0
100
200
m
ea
su
re
d
v
o
lt
a
g
e(
m
V
)
I
Q
RF:-0.7dBm LO:10.3dBm
圖 3-34 IQ 混波器 RF 端掛載 10dB 衰減器 IQ 曲線量測圖38
0
90
180
270
360
phase difference(deg)
-80
-40
0
40
80
m
ea
su
re
d
v
o
lt
a
g
e(
m
V)
I
Q
LO: 10.5dBm RF: -10.9dBm
圖 3-35 IQ 混波器 RF 端掛載 20dB 衰減器 IQ 曲線量測圖0
90
180
270
360
phase difference(deg)
-20
0
20
40
60
m
ea
su
re
d
v
o
lt
a
g
e(
m
V)
I
Q
LO: 10.4dBm RF: -17dBm
圖 3-36 IQ 混波器 RF 端掛載 26dB 衰減器 IQ 曲線量測圖39 I 與 Q 曲線相位差(deg) 誤差 RF=10.1dBm,LO=11dBm 100⁰ 10⁰ RF=-0.7dBm,LO=10.3dBm 100⁰ 10⁰ RF=-10.9dBm,LO=10.5dBm 110⁰ 20⁰ RF=-17dBm,LO=10.4dBm 120⁰ 30⁰ 表 3-3 圖 3-33 至圖 3-36 的 I 及 Q 曲線相位差整理表 圖 3-37 IQ 混波器電路實體圖
40
第四章
系統偵測功能量測及分析
4.1 系統組裝及轉動機制介紹
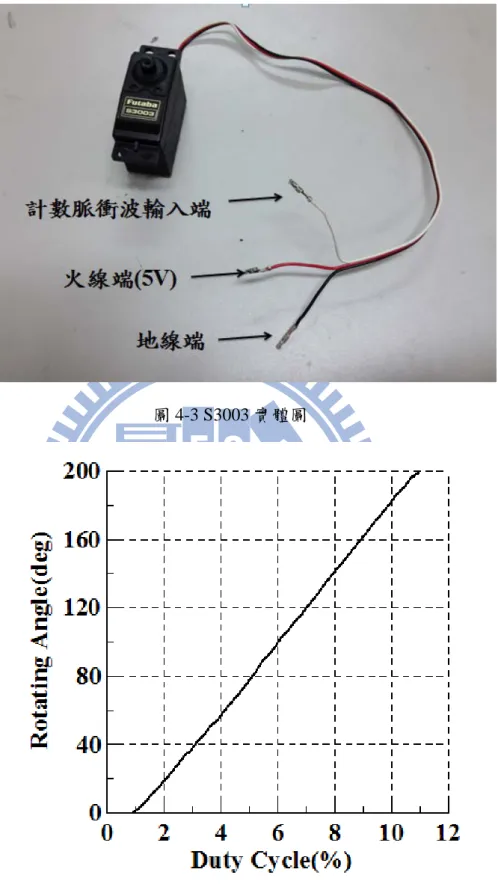
由於追蹤時,必須要整個系統一起做轉動,因此必須將所有元件一起架設在轉動平 台上。圖 4-1 及圖 4-2 分別為系統的俯視圖及側視圖,在此我們將全部的元件全部附載 在整個天線之後,並利用銅柱、螺絲以及螺帽使其可以固定。各元件樓層從最靠近天線 處往後依序為 180 度分合波器、兩種放大器模組、IQ 混波器,而圖 4-2 就是系統組裝完 成後的實體圖,各元件間使用鐵氟龍材料製成的傳輸線連接,而直流訊號的輸出以及驅 動放大器的直流電則連接到排線後利用排線分別連到輸出儀器及直流供應器(Power Supply),排線長度夠長,因此在轉動時線的問題不會造成影響。 圖 4-1 系統整體架構俯視實體圖41 圖 4-2 系統整體架構側視實體圖 轉動機制方面需要硬體和軟體做結合,硬體方面使用了 Futaba 的 S3003 伺服機,此 伺服機實體圖顯示在圖 4-3,從此圖中可看出此伺服機有 3 個腳位,分別是直流偏壓端、 接地端、以及脈衝寬度調變波(Pulse-Width Modulation, PWM)輸入端,伺服機的原理為 當在脈衝寬度調變波輸入端輸入不同脈衝寬度的波時,它最上方托盤的轉動就會隨著此 寬度對應到的轉動角度的數值轉至不同角度,而圖 4-4 為 S3003 數入脈波之脈衝寬度轉 換成 duty cycle 後與轉動角度關係曲線圖,因為曲線大致呈現性變化,因此只需要利用 軟體讓 duty cycle 持續線性變化,就可以讓此伺服機以固定角度持續轉動,進而讓天線 接收到各個方位的能量,來達到偵測的目的。圖 4-4 即為 S3003 輸入脈波 duty cycle 與 轉動角度關係圖,此伺服機只能轉動約 198 度,因此無法做 360 度旋轉偵測。而脈波訊 號的輸入則需要倚靠軟體的幫忙,於下一小節將會介紹如何利用軟體輸入脈衝波以及將 量測到的值讀取下來做訊號處理獲得我們所需要的量測波型。
42
圖 4-3 S3003 實體圖
43
4.2 LabVIEW 做脈衝輸入及後端處理介紹
LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是由 National
Instrument 公司所推出的一套圖控式程式語言,它是一套應用於實驗室中,作為儀表設 計或式控制之用,因次我們常稱 LabVIEW 程式為虛擬儀表(Virtual Instrument,VI)應用程 式,舉凡工廠監工、醫學工程、航太工程等皆有應用的例子,於本研究中,讓伺服機轉 動以及量測數值讀取及處理的功能也可以利用 LabVIEW 來達到。一般整個應用程式的 架構,包含了三個主要的部份: (1) 前置面板(Front Panel)視窗 (2) 程式方塊(Block Diagram)視窗 (3) 圖像與連接器(Icon/Connector) 這三個部分建構出完整的 LabVIEW 應用程式。在前置面板視窗中,我們可以執行資料 或是命令的輸入,以及顯示相關資料運算、監控或是擷取的結果,彷彿像是在這視窗中 執行訊號產生器、示波器等儀器的操作,因此被視為虛擬儀表,而設計這個前置面板的 相關應用程式,則稱為程式方塊視窗,程式方塊視窗包含 Visual C/C++或是 Visual Basic 中常應用的資料結構,如常數、陣列、迴圈、Case 結構等,差別在於內部皆為圖形化程 式,因此比一般的程式語言更為人性化。而 National Instrument 公司也為 LabVIEW 程式 製作了資料擷取卡(Data Acquisition Card, DAQ Card),藉由擷取卡及 LabVIEW 本身的擷 取程式就可以將硬體量測結果擷取到 LabVIEW 程式中,也能將在 LabVIEW 設定的參 數藉由擷取卡傳送到硬體上面做控制與操作,因此 LabVIEW 也讓於本研究的資料後端 處理更為方便許多。
本實驗用的資料擷取卡為 National Instrument 的 USB-6212,圖 4-5 所示為此資料擷 取卡的實體圖,而圖 4-6 為此擷取卡的腳位圖,擷取卡腳位通常分做類比腳位(腳位名稱 開頭為 A)以及數位腳位,而數位腳位又能分做一般的數位訊號輸出入(腳位名稱開頭為 D)以及計數訊號輸出入(腳位名稱開頭為 ctr),因此在本實驗中,無論是要從硬體輸入類
44
比直流訊號到程式中或是程式輸出一脈波(在此卡為計數訊號)到伺服器上,皆能透過本 擷取卡完成。
圖 4-5 USB-6212 實體圖
45 本實驗程式分為兩部分,第一部分為伺服機控制程式,第二部分為資料讀取並處理 程式。本程式的流程圖為圖 4-7,首先先設定量測的參數,接下來經由角度換算成 duty cycle 的值之後,從程式輸出到伺服機上面使其轉動到某個角度,接下來讀值、運算、 存值後,再轉到下一個角度,用迴圈連續重複同樣的動作後,若設定解度全部掃描完, 再看當初的參數決定要掃幾遍,再重複以上的動作;待全部動作都結束後,就在前置面 板把量測結果圖畫出來,並將值儲存在 Excel 裡,以備以後的資料整理。 圖 4-7 程式流程圖 而以上流程圖寫成 LabVIEW 程式整體圖顯示於圖 4-8 及圖 4-9,圖 4-8 顯示前置面 板視窗,圖 4-9 顯示程式方塊視窗,程式分成伺服機控制與資料處理兩部分,圖 4-10 顯 示的是利用 LabVIEW 程式產生一個周期性脈衝波,並藉由輸入轉動角度來算出它的 duty cycle,並將周期固定後藉由此脈衝波讓角度轉至使用者設定的角度,圖 4-11 則是
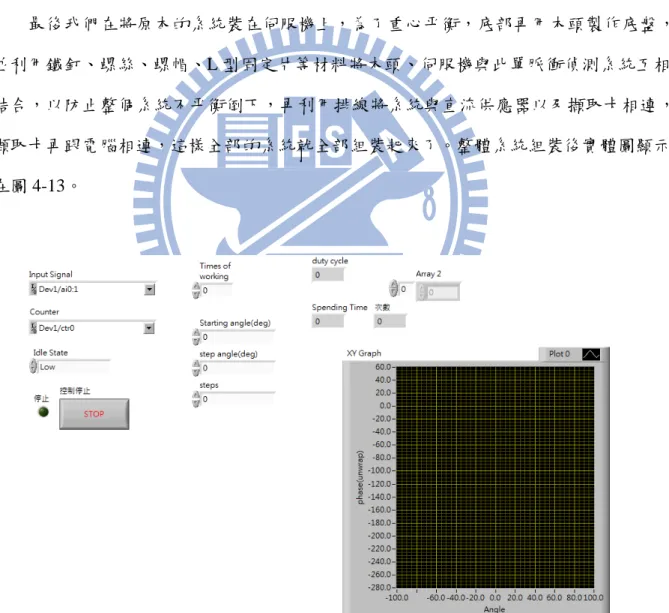
46 資料處理的程式,它藉由 DAQ 卡讀取程式方塊將 I 和 Q 的電壓值讀取下來後,將它經 過演算換成角度,並藉由 X-Y 圖程式方塊將結果顯示在前置面板的虛擬示波器上。而資 料運算則是利用式 3-10 的公式,資料運算方塊圖顯示在圖 4-12 上,在此要注意的是, 因為 tan-1 (.)所定義的角度範圍為-90⁰~90⁰,也就是說它原本定義區間只是在第一象限 以及第四象限,因此如果我們要讓定義範圍變成-180⁰~180⁰,也就是四個象限都要被定 義到的話,第二和第三象限的值就必須要做轉換,經過推導之後,第二象限必須要讓輸 出值再加 180 度,而第三象限則是必須要讓輸出值再減 180 度,這樣才能讓定義範圍變 成-180⁰ ~180⁰。 最後我們在將原本的系統裝在伺服機上,為了重心平衡,底部再用木頭製作底盤, 並利用鐵釘、螺絲、螺帽、L 型固定片等材料將木頭、伺服機與此單脈衝偵測系統互相 結合,以防止整個系統不平衡倒下,再利用排線將系統與直流供應器以及擷取卡相連, 擷取卡再跟電腦相連,這樣全部的系統就全部組裝起來了。整體系統組裝後實體圖顯示 在圖 4-13。
47 圖 4-9 系統整體 La b V IEW 程式圖 —B loc k D ia gr am 視窗
48 圖 4-10 脈衝操作伺服機 La b V IEW 程式圖
49 圖 4-11 資料讀取及處 理 La b V IEW 程式圖
50 圖 4-12 資料運算方塊圖 圖 4-13 整體系統組裝後實體圖