國
立
交
通
大
學
電信工程學系
碩
士
論
文
24-GHz 車輛前視防撞警示雷達之
單脈衝透鏡天線系統設計與驗證
Design and Verification of a Monopulse Lens Antenna System
for 24-GHz Forward-Looking Collision Warning Radar
研 究 生:賴浩宇
指導教授:鍾世忠 教授
24-GHz 車輛前視防撞警示雷達之
單脈衝透鏡天線系統設計與驗證
Design and Verification of a Monopulse Lens Antenna System
for 24-GHz Forward-Looking Collision Warning Radar
研 究 生:賴浩宇 Student:Hao-Yu Lai
指導教授:鍾世忠 Advisor:Shyh-Jong Chung
國 立 交 通 大 學
電信工程研究系
碩 士 論 文
A Thesis
Submitted to Institute of Communication
College of Electrical Engineering and Computer Science
National Chiao Tung University
in partial Fulfillment of the Requirements
for the Degree of Master of Science
In communication Engineering
July 2009
Hsinchu, Taiwan, Republic of China
24-GHz 車輛前視防撞警示雷達之
單脈衝透鏡天線系統設計與驗證
研究生:賴浩宇 指導教授:鍾世忠
國立交通大學 電信工程研究所
摘要
本論文中設計一個應用於 24-GHz 前視防撞雷達之單脈衝透鏡天線系統。本 論文之架構為使用數個串聯饋入之微帶天線組成串接微帶天線陣列作為號角天 線的饋入,相同的設計應用於接收與發射端天線。另外在接收端天線部分,設計 一個焦距與接收號角天線高度相等的透鏡覆蓋於號角天線上,並驗證此尺寸與焦 距僅數波長之透鏡仍有其效果。此架構的優點是使用號角天線能壓抑串接微帶天 線陣列的旁波束以及降低波束寬,同時可作為透鏡的支架,另外,接收與發射天 線的號角天線金屬牆也可大幅提升接收與發射端的隔離度。 最後為了驗證此單脈衝天線在實際應用上的效果,搭配上射頻模組與數位訊 號處理模組,實際測量金屬圓柱與小型車輛等目標物之回波頻率與回波量的多 寡,據以判斷目標物距離,並且與天線之和場型比值做比較與分析。Design and Verification of a Monopulse Lens Antenna System
for 24-GHz Forward-Looking Collision Warning Radar
Student: Hao-Yu Lai Adivisor: Dr. Shyh-Jong Chung
Institute of Communication Engineering
National Chia Tung University
Abstract
In this thesis, a Monopulse lens antenna system for 24-GHz forward-looking collision warning radar system has been developed. We use horn antenna which fed with a series-fed microstrip patch antenna array as transmitting and receiving antenna. In additional, we design a lens which focus length equals the height of horn to cover the horn of the receiving antenna, and verified that lens with dimension and focal length in several wavelength is working. Horn could suppress side lobe level and decrease the beamwidth of microstrip patch antenna array. Horn could also be strut of the lens of receiving antenna. Another advantage of horn antenna is the metal wall of horn could enhance the isolation between transmitting and receiving port.
In the end, we combine the Monopulse lens antenna system with RF-module and DSP-module as a radar system. We measure the frequency of echo-wave to determine the distance between target and radar senor. At the same time, we measure and analysis the power level of echo-wave to compare with the sum and difference pattern of the receiving antenna we introduce.
誌謝
在兩年的研究所學習中,首先要感謝的是我的指導教授鍾世忠博士,感謝老 師不但在研究方面給予我相當充足的指導、提供良好的學習環境讓我學習成長, 在待人處世方面也給予我很多的學習機會。謝謝實驗室的搭檔-少華,因為你的 幫助,讓我在研究與學習上都能更快且更好;特別也謝謝雷達組新學弟:阿甘、 小豪、益吉與硯澤,有你們的協助量測,讓我的論文內容更加的豐富完整。謝謝 博士班的學長:肇堂、菁偉、凱哥、何博、達叔給我的幫助與建議,讓我在學習 上有更多的助力。同時還要感謝實驗室的成員:冷肥、財溢、柏翔、煥彬、志謙、 子嫻、色超、小池、珮華,以及所有幫助過我的人,因為有你們讓我的研究所生 活更加的多彩多姿,無論何時,想到有你們與我一起共同努力著,就更加有向前 邁步的動力。最後感謝我的家人,因為有你們的支持與鼓勵,才讓我的研究所生 活能順利完成。目錄
中文摘要……… i 英文摘要……… ii 誌謝……… iii 目錄……… iv 圖目錄……… v 表目錄……… viii 第一章 雷達原理及單脈衝技術介紹……… 1 1.1 背景及動機 ……… 1 1.2 雷達原理 ……… 2 1.3 單脈衝雷達系統 ……… 4 第二章 饋入天線設計……… 8 2.1 微帶天線理論 ……… 8 2.2 微帶天線設計……… 9 2.3 單脈衝系統接收端天線設計……… 14 2.4 單脈衝系統發送端天線……… 23 第三章 透鏡設計……… 25 3.1 透鏡介紹……… 25 3.2 透鏡設計 ……… 31 第四章 透鏡天線整合及量測……… 36 4.1 24-GHz 垂直傳輸線……… 36 4.2 天線整合及量測……… 38 第五章 單脈衝雷達系統整合量測及分析……… 47 5.1 雷達量測與討論……… 47 5.2 30 公尺判斷車道之雷達應用……… 52 第六章 結論……… 54 參考文獻 ……… 55圖目錄
圖 1.1 反應時間與失事率關係圖……… 2 圖 1.2 雷達偵測原理示意圖……… 3 圖 1.3 雷達方程式示意圖……… 4 圖 1.4 單脈衝系統之Σ與Δ天線場型示意圖……… 5 圖 1.5 單脈衝訊號比值……… 5 圖 1.6 環形耦合器……… 6 圖 1.7 枝幹耦合器……… 7 圖 1.8 擬開發雷達功能示意圖……… 8 圖 2.1 矩形微帶貼片天線模型……… 8 圖 2.2 貼片天線輻射場型……… 9 圖 2.3 微帶天線饋入方式……… 10 圖 2.4 兩埠饋入微帶天線之傳輸線等效模型……… 11 圖 2.5 微帶天線陣列……… 12 圖 2.6 微帶天線陣列之反射損耗與輻射場型模擬結果……… 13 圖 2.7 180 相位切換器……… 14 圖 2.8 埠與埠饋入之輸出埠相位變化……… 14 圖 2.9 接收端陣列天線饋入號角天線架構示意圖……… 15 圖 2.10 接收端天線有無加上金屬牆之輻射場形……… 16 圖 2.11 改變陣列天線與號角天線金屬牆距離之輻射場形……… 17 圖 2.12 改變接收端號角天線金屬牆高度之輻射場形……… 19 圖 2.13 改變號角天線金屬牆傾斜角度之輻射場形……… 20 圖 2.14 擬開發接收端天線之Σ與Δ輻射場形模擬比較……… 21 圖 2.15 擬開發接收端天線之Σ與Δ輻射場形比較與差值……… 21 圖 2.16 接收端天線之輸入反射損耗模擬結果……… 22 圖 2.17 發射端天線結構示意圖……… 23 圖 2.18 發射端天線輻射場形模擬結果……… 23 圖 2.19 發射端天線反射損耗模擬結果……… 24 圖 3.1 介質透鏡……… 25 圖 3.2 金屬板透鏡……… 26圖 3.3 改變介質之介質透鏡……… 26 圖 3.4 改變曲率之介質透鏡……… 27 圖 3.5 介質透鏡之光束覓跡圖……… 27 圖 3.6 S2為平面的雙曲線透鏡……… 29 圖 3.7 S1為平面的凸面透鏡……… 30 圖 3.8 透鏡的反射路徑示意圖……… 31 圖 3.9 接收端天線相位觀察示意圖……… 32 圖 3.10 號角天線開口模擬與計算之相位變化比較圖……… 32 圖 3.11 號角天線開口不同位置的模擬與計算之相位變化比較圖……… 33 圖 3.12 有無透鏡之模輻射場型模擬比較……… 34 圖 3.13 有無透鏡之模輻射場型模擬比較……… 34 圖 3.14 圓柱狀透鏡三視圖……… 35 圖 3.15 柱狀透鏡照片……… 35 圖 4.1 槽孔耦合結構圖……… 36 圖 4.2 槽孔耦合 S 參數模擬與量測結果……… 37 圖 4.3 對位偏移對槽孔耦合效果之影響……… 38 圖 4.4 天線與槽孔耦合饋入照片……… 38 圖 4.5 接收端天線之量測反射損耗圖……… 39 圖 4.6 接收端天線未加透鏡之輻射場形……… 40 圖 4.7 接收端天線未加透鏡之輻射場形……… 40 圖 4.8 接收端天線未加透鏡之輻射場形比較……… 41 圖 4.9 接收端天線未加透鏡之輻射場形比值……… 41 圖 4.10 接收端天線未加透鏡之輻射場形比較……… 42 圖 4.11 接收端天線未加透鏡之輻射場形比值……… 42 圖 4.12 有無透鏡之模輻射場型模擬比較……… 43 圖 4.13 有無透鏡之模輻射場型模擬比較……… 44 圖 4.14 接收端天線加透鏡之輻射場形比較……… 44 圖 4.15 接收端天線加透鏡之輻射場形比值……… 45 圖 4.16 發射端天線之量測反射損耗圖……… 45 圖 4.17 發射端天線輻射場形……… 46 圖 4.18 接收與發送端天線隔離度……… 46 圖 5.1 雷達系統照片……… 47
圖 5.2 數位訊號處理模組照片……… 48 圖 5.3 雷達量測環境與架設照片……… 48 圖 5.4 圓桶距雷達 15 公尺之與相位關係圖……… 50 圖 5.5 不同距離下-20~20°之與訊號比值圖(圓桶)……… 50 圖 5.6 不同距離下-20~20°之與訊號比值圖(小型轎車)……… 51 圖 5.7 等效偵測角度偏移示意圖……… 51 圖 5.8 雜訊背景示意圖……… 52 圖 5.9 偵測角度劃分與緩衝區域示意圖……… 53 圖 5.10 30 公尺判斷車道之雷達應用示意圖……… 53
表目錄
表 2.1 梯形分布天線陣列尺寸……… 12 表 4.1 槽孔耦合式垂直傳輸線設計參數……… 37
第一章 雷達原理及單脈衝技術介紹
1-1.背景及動機
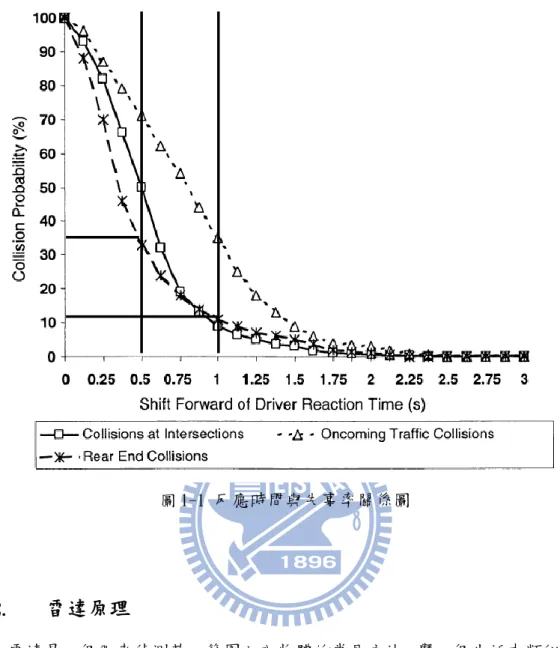
隨著機動車輛的逐漸普及,目前在已開發國家甚至是開發中國家幾乎是每個 家庭都有一輛以上的汽機車或其他機動車輛,使得道路的交通狀況日益擁擠。在 這樣的情況下,各國的道路建設也逐漸無法負荷汽機車的成長速度,擁擠的道路 交通以及各種複雜的交通環境,也開始產生了許多交通安全問題,造成各種交通 事故的發生。 因車輛的安全問題日益嚴重,在電子、通訊等技術高度發展與應用的今日, 人們開始積極的尋求如何將這些技術運用在車輛上,監控駕駛人的精神狀態、加 強視野、防止碰撞、警示各種危險狀況,以提升車輛行駛的安全性能,增進交通 安全。在這些增進駕駛安全的各種技術中,汽車防撞雷達即屬於相當重要的一部 分,其目的在於輔助人類感測能力的不足,主要是利用先進的通訊、控制與資訊 科技,偵測車輛週遭的動態狀況,如其他車輛、行人、或路上障礙物的相對位置、 速度與加速度等訊息,並適時警示駕駛人採取必要措施(如加速、減速或保持車 道等),以防止發生撞擊,達到增進車輛駕駛安全之目的。 根據研究,駕駛人如能多 0.5 秒之反應時間,則車輛追撞之機率可減少 60%; 而如能再多 0.5 秒,則追撞機率可減少剩下 10%,反應時間的多寡與失事率關係 如圖 1-1 所示。汽車防撞系統的作用即在利用先進的電子設備,爭取架駛人的反 應時間。根據美國聯絡車隊(US fleets of tractor-trailers)的四年資料, Eaton-Vorad 的防撞警告系統降低了總計可防止事故平均值的 50% (國家高速公 路交通安全管理局(National Highway Traffic Safety Administration, NHTSA) 資料),甚至可達 70%(Eaton-Vorad 資料)。圖 1-1 反應時間與失事率關係圖 1-2.
雷達原理
雷達是一個用來偵測某一範圍之內物體的常見方法,舉一個生活中類似雷達 原理的例子:在黑暗中使用手電筒照射目標物時,人們之所以能看見物體的存 在,是因為手電筒之光照射到物體後,有一部份的光線反射回到眼中,在視網膜 上經過成像原理,讓人可以感受到有物體的存在,當電筒離開目標物,因為沒有 反射光線回到眼睛,也就無法在視網膜上成像使我們“看到”物體。雷達的運作 原理也相同,因為電磁波的傳播方式與光線相同,雷達藉著傳送天線端產生出高 功率電磁波,此電磁波經由天線輻射出去形成所要的雷達波。當發射出去的雷達 波在空間中傳播,碰到目標物後部分反射之電磁波經由雷達的接收天線回到接收 端,稱之為回波;回波經過濾波、放大之後,在透過訊號處理之後,與發射波相 對應比較,據以判斷目標是否存在,進而決定此目標之距離、方向、高度、速度 和其他資訊,並藉雷達顯示器加以顯示出來,如圖 1-2 所示,此即為雷達運作之 基本原理。圖 1-2 雷達偵測原理示意圖 利用電磁波碰到物體表面反射後形成的回波,與發射時的發送波的差異,我 們可以得到欲偵測物體的資訊: 1. 距離:脈衝波跟 FMCW 雷達的計算方式不同。以脈衝波雷達而言,是測 量脈衝波發射與接收到回波的時間差;至於 FMCW 雷達則是用固定速率 改變發射波頻率,再比較發射與回波的頻率差值,藉以得到電磁波由發 射機到目標物,經過反射折回的時間。 2. 相對速度:運用都普勒效應。若雷達與目標在波的行進方向有相速度, 則觀測到的頻率會隨著相對速度的大小產生頻率漂移。 0 (2 / ) d f v c f (1-1) 其中 v 為雷達與目標物之相對速度在電磁波行徑方向上的分量、c 為光 速、fo為發射電磁波頻率、fd為都普勒偏移頻率。 3. 角度:要知道目標物所在的角度有許多方法,如利用可切換波束天線陣 列,或是利用機械式轉動天線偵測。本篇論文使用的則是單脈衝 (Monopulse)技術,利用切換不同的天線場型接收回波,在比較其回波 大小來決定目標物所在角度。 式 1-2 為雷達方程式,藉由雷達方程式能夠描述雷達系統的特性。方程式 中,P 為雷達系統發射的功率大小,G 為天線增益,σ為目標物相對反射面積t
(RCS,Radar Cross Section),Pmin為系統靈敏度,Rmax為最遠可偵測距離,λ
為操作頻率的波長。 1 / 4 2 2 max 3 min (4 ) t PG R P (1-2) 由圖 1-3 代表雷達方程式的意義。雷達系統能接收的功率,為雷達系統發射 的功率、發射端天線增益、目標物之反射面積、接收端天線功率以及雷達系統與 目標物之間距離之影響的乘績。
Tx
Rx
由雷達方程式的結果,也可推測若希望能增加最大偵測距離,同時代表必頇 增加雷達的發射功率(Pt)、提高天線的增益(Gt、Gr)、或者增加系統的靈敏度(Pmin)。 圖 1-3 雷達方程式示意圖
1-3.
單脈衝雷達系統
單脈衝技術是一種取得角度的方法,目前多應用於軍事與航空。取得角度 的技術大致可分為三類:1.振幅比較法(Amplitude Comparison)、2.相位比較 法(Phase Comparison)、3.振幅相位比較法(Amplitude and Phase Comparison) 。 相位比較法是利用兩個獨立且完全相同的天線,以接收到信號的相位差來 判斷目標物的角度。因為是比較兩天線收到信號的相位差,因此相位比較法必 頇知道兩天線之間精確的距離來換算相位差,而且兩天線之間擺設的距離相當 重要,若過於接近,則兩天線之間的耦合效應會間接影響兩天線的相位差,然 而距離過大對於接收訊號來看即不再同一點,亦容易受到干擾而產生誤差。因 此在設計與製作上多有限制。 而振幅比較法利用利用天線產生(Sum)模與(Difference)模兩種不同 的場形。當單脈衝的雷達發射訊號,碰到物體反射後,經過設計的雷達接收天 線會產生Σ模與Δ模場形來接收回波訊號,兩種場形接收的回波分別經過同樣 放大之後,比較它們的訊號比值,便可得知物體的角度[1]。 振幅比較法需要有兩種不一樣的天線場型,如圖 1-4 所示,它們在不同角 度的訊號大小不相同,因此我們可以藉由設計每個角度的訊號打小比值,再將 所接收之回波大小的比值與所設計之比值相互比較,進而判斷目標物之角度。 而要產生模與模的場形,是利用兩個完全相同的天線來完成,當饋入同相位的訊號時,我們稱之為模訊號(sum signal);當饋入反相位的訊號時,稱 之為模訊號(difference signal)。 圖 1-4 單脈衝系統之Σ與Δ天線場型示意圖 圖 1-5 單脈衝訊號比值 此外,因為兩種天線的輻射場形是對稱的,因此單只比較訊號大小之比值 無法判斷目標物的左右。舉例來說,若目標物位於雷達前方正 30 度的位置, 單藉由訊號的比值可以判斷出 30 度,但無法得知正負。此時,必頇在加入相 位的判斷因子,訊號的相位均為正值,但是訊號的相位左右相反,因此兩 訊號的比值左右的正負號相反,如圖 1-5 所示。 接著,我們便可利用所設計出的Σ與Δ場型,建立一張表:不同角度對應 不同比值,如圖。當雷達接收到訊號,即可對照此表判斷出物體角度。 要產生同相位以及反相位的饋入訊號,利用環形偶合器或枝幹偶合器是最
常見的方式。 A. 環形耦合器 如圖 1-6 所示,訊號由環形耦合器的埠饋入時,因為訊號到埠 1 走 了四分之三個波長,到埠 2 走了四分之一個波長,所以能夠由埠 1 與埠 2 取出大小相同但是相位相反的訊號;反之當訊號由埠饋入時,到埠 1 與 到埠 2 均走四分之一個波長,因此能夠由埠 1 與埠 2 取出大小和相位都相 同的訊號。另外,因為環形耦合器的特性,訊號由埠饋入時,到埠將會 相互抵消,反之由埠饋入亦然。 但是因為環形耦合器的埠 2 位於埠與埠之間,因為埠與埠為饋 入埠,而埠 1 與埠 2 連接天線,因此使用環形耦合器必頇跳線,這是個需 要仔細評估的問題。 Σ Δ 1 2 圖 1-6 環形耦合器 B. 枝幹耦合器 圖 1-7 為枝幹耦合器示意圖,為了達到反相位的輸出,必頇在埠 2 加 上一段四分之一波長的傳輸線。當訊號由埠饋入時,因為埠 2 多了一段 傳輸線的緣故,訊號到埠 2 走了四分之三個波長,到埠 3 也走了四分之三 個波長,因此在埠 2 與埠 3 可取出大小與相位均相同的訊號;當訊號由埠 饋入時,到埠 2 走了一個波長,到埠 3 則走了二分之一個波長,因此在埠 2 與埠 3 可取出大小相同但是相位相反的訊號。 因為埠與埠位於對稱面的同一邊,因此不需與環形耦合器一樣需要 跳線。
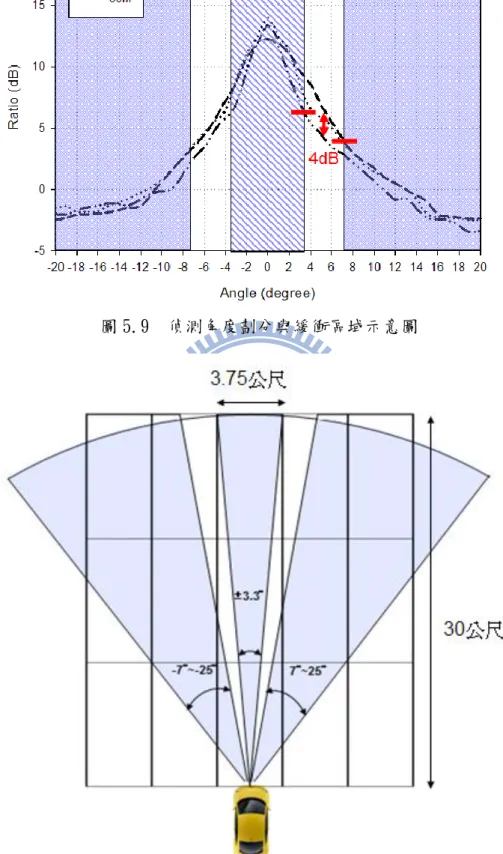
圖 1-7 枝幹耦合器 至於相位振福比較法,則是利用相位比較與振福比較兩種技術做結合。 依上述所介紹之能夠判斷距離與速度之連續調頻技術,與能夠判斷目標物所 在角度之單脈衝技術,我們希望將這兩種技術應用於一個雷達系統上,使之同時 具有能判斷距離、速度與角度的功能。 圖 1-8 為擬開發雷達系統功能示意圖,希望此雷達系統具有在 30 公尺內判 斷前方車輛距離,同時也能判斷此車輛位於本車道或是左右車道。 圖 1-8 擬開發雷達功能示意圖
第二章 饋入天線
作為透鏡天線的饋入天線,本篇論文選擇使用號角天線,一方面可以壓低天 線的旁波束,另一方面可以作為透鏡的支撐。而號角天線除了利用導波器將波導 入以外,也可使用其他的天線作為饋入,在這裡使用串接微帶天線陣列作為號角 天線的饋入[2]。2-1.
微帶天線理論
A. 傳輸線模型: 對於矩形的貼片天線(Patch Antenna)最簡單的分析方式是使用傳輸線 理論,將貼片天線視為兩條平行且具有輻射能力的槽孔。換言之,矩形的貼 片天線是依靠兩邊的漏電場輻射,如圖 2-1;而漏電場會影響貼片天線的長 度,因此半波長的貼片天線長度一般會略小於介質基板中的半波長。在傳輸 線模型的分析中,可將矩形貼片天線視為一段長度為半波長,且端點為開路 的傳輸線。 圖 2-1 矩形微帶貼片天線模型利用傳輸線模型來分析貼片天線,其共振頻率如式 2-1 所示。在實際考 量上,漏電場的存在會讓貼片天線的長度比實際所見略長。式中的參數 q 在 同樣的基板以及頻率範圍下是一定值,而此值會影響計算之共振頻率的準確 性。 2 r r c f q l (2-1) B. 共振腔模型[3,4]: 雖然傳輸線模型用於分析貼片天線方便又容易,但還是有一些限制,傳 輸線模型忽略了饋入端的漏電場不連續,而這樣的缺點與限制在共振腔模型 中將能得到解決。在共振腔模型中,可將貼片天線視為一個由平行金屬面與 磁牆組成的 TMz 模態共振腔。當然,因為一些未輻射的能量與輸入阻抗,使 得這只是一個近似的模型,若要精確的計算,必頇把正切損耗與完整的邊界 條件都列入考慮。
2-2.
微帶天線設計
A. 基板與饋入 基板的選擇中,其介電係數與正切損耗是最為重要的兩個考量因素。高的 介電係數能夠縮小微波電路的尺寸,但同時也會降低頻寬;而大的正切損耗會 讓輻射效率降低且增加饋入損耗。 一般選擇較厚而且介電係數較低的基板,能夠有較好的輻射效率與較大的 頻寬,但若厚度過高將會激發表面波,使得輻射效率降低。 如前所提到的,無論在傳輸線模型或者是共振腔模型中,貼片天線等效為 兩個平行且具輻射能力的槽孔,圖 2-2 所示為貼片天線所形成的 E-plane 與 H-plane 的輻射場型。 (a)E-plane 輻射場形(b) H-plane 輻射場形 圖 2-2 貼片天線輻射場型 在微帶天線的設計中,其饋入方式對於天線的特性有相當大的影響,其中 較為常見的幾種如圖 2-3 所示: 圖 2-3 微帶天線饋入方式 使用微帶線饋入天線最基本的規則是在天線上尋找適合的匹配點,在最大 的限度降低反射,以減少饋入的反射損耗。標準的共振矩形貼片天線其邊緣的 阻抗約為 100~400Ω,若要直接利用微帶線由貼片天線邊緣饋入,則微帶線的 特性阻抗 也必頇有相當高的阻抗才能夠達成匹配而不會有反射,若此時選擇 的基板厚度很薄或者其介電係數(εr)很大,則如此高阻抗的微帶線會因為太細
而無法實現,解決的方法之一就如同圖 2-3(a)與(c),將饋入點選擇在微帶貼 片天線之內,使所需的特性阻抗變小。粗略估計圖 2-3(a)與(c)狀況下的阻抗 如式 2-2 與式 2-3 所示: cos in A l Z Z L (2-2) 2 2 90 ( ) 1 r A r L Z W (2-3) A Z 為貼片天線邊緣的視入阻抗,而 l 為貼片天線邊緣至欲估計點之間的距離。 圖 2-3(c)將微帶線伸入貼片天線內,而貼片天線是藉由邊緣的漏電場輻 射,因此這樣的饋入方式會破壞天線特性。而另一種解決方法是在天線邊緣饋 入點與微帶饋入線之間加一段四分之一波長組抗轉換器。阻抗轉換器的特性如 式 2-4 所示: 0' 0 A Z Z Z (2-4) 其中Z 為微帶線特性阻抗,0 Z 為貼片天線邊緣的視入阻抗。但是使用組抗轉A 換器的缺點則是必頇增加一段四分之一波長的傳輸線面積。 B. 陣列微帶天線設計 本篇論文中,使用串聯饋入微帶天線,形成串接微帶天線陣列[5],而陣 列天線之間串接的傳輸線地需選擇足夠細以免對邊緣輻射場造成干擾。在傳輸 線模型中,因為微帶貼片天線利用漏電場輻射,漏電場部份可以視為兩個具有 輻射能力的槽孔,因此具輻射能力之槽孔可等效成一個電導(Conductance) G 以及一個電納(Susceptance) B 並聯,而傳輸線與微帶天線部份則視為寬度不 同之傳輸線,因此兩傳輸線之間的不連續效應已兩個電抗(Reactance)X1、X2 來等校,因此等校模型如圖 2-4 所示。 圖 2-4 兩埠饋入微帶天線之傳輸線等效模型
一般而言,因旁波束的大小考量,不會讓陣列天線的能量成均勻分布,因 此串接饋入的天線陣列中每個天線單元寬度需要經過設計。而每個天線單元的 設計可如圖所示,二分之波長的貼片天線加上兩邊各四分之波長的微帶饋入 線,可形成一個波長的天線單元,在這一個波長的天線單元中,即可經由微帶 貼片天線的寬度改變來設計此一天線單元所留下的輻射能量,以及剩餘流出給 其他天線單元的能量多寡。 本篇論文中因為空間的限制,採用 7 個天線單元組成的天線陣列,而為了 能有較小的旁波束,能量的分布方式選擇梯形分布。為達成梯型之能量分布, 在天線陣列的末端加上一段開路殘段,來取代下一個天線單元,維持結構以及 特性上的對稱。而添加的這一段開路殘段長度為四分之一個波長,能夠讓波確 保能激發出 Broaside 的輻射場型。 陣列天線的每個天線單元以及連接線之尺寸如圖 2-5 與表 2.1 所示: 圖 2-5 微帶天線陣列 Element Length Le1 Le2 Le3 Le4 Le5 Le6 Le7 3.25 3.22 3.2 3.18 3.2 3.22 3.25 Element Width We1 We2 We3 We4 We5 We6 We7 Wd 2.6 3.2 3.6 3.8 3.6 3.2 2.6 0.5 Connectiong Length Lc1 Lc2 Lc3 Lc4 Lc5 Lc6 Lc7 Lc8 3.41 3.3 3.22 3.17 3.17 3.22 3.3 3.41 (單位為 mm) 表 2-1 梯形分布天線陣列尺寸
所使用的基板為 Rogers RO4003(εr=3.38, Thickness=0.2032mm),天線 陣列使用全波軟體 HFSS 來模擬。圖 2-6(a)為單列陣列天線模擬之反射損耗與 場型。如圖 2-6(b)所示,10dB 反射損耗落在 24.01GHz~24.27GHz 之間,系統 所要求的頻率則是 24.025GHz~24.225GHz,此設計符合系統需求。但依照實作 經驗,實際量測大多有比模擬要偏往低頻的趨勢,因此在模擬的尺寸比表 2-1 之實際尺寸要大一些,如此實作所量測的頻率與模擬頻率相符合,且能應用於
此系統操作頻率。 Frequency (GHz) 23.0 23.5 24.0 24.5 25.0 S para met er ( dB ) -25 -20 -15 -10 -5 0 (a)微帶天線陣列之反射損耗模擬結果 -30 -20 -10 0 10 0 30 60 90 120 150 180 210 240 270 300 330 (b) 微帶天線陣列之輻射場型模擬結果 圖 2-6 微帶天線陣列之(a)反射損耗 (b)輻射場型模擬結果
2-3.
單脈衝系統接收端天線設計
A. 180 相位差: 單脈衝的天線需要由兩支天線分別以同相位或反相位饋入來達成,如前所 提可用枝幹耦合器或者環形耦合器來實現。為實現的方便,本篇論文選擇使用 枝幹耦合器。 圖 2-7 180 相位切換器 如圖 2-7,在枝幹耦合器埠2端加上一段四分之一波長的傳輸線,經過模 擬而得在 24.1GHz 時的四分之一波長為 1.88mm。若波由埠1饋入,在埠 2 以及 埠 3 將會得到等分且等相位的波,因此埠 1 稱為埠(Sum Port);若波由埠 4 饋入,因為波到埠 2 的路徑長比到埠 3 要多二分之一個波長,此時埠 2 以及埠 3 將會得到等分且反相位的波,因此埠 4 為埠(Difference Port)。 圖 2-8 為模擬加上四分之一波長傳輸線的枝幹耦合器,可看出由埠 1 饋入 時,埠 2 與埠 3 相位相同;而圖 2-8(b)可知由埠 4 饋入時,埠 2 以及埠 3 相差 180。 Frequency (GHz) 22 23 24 25 26 Angl e (Degree) -150 -100 -50 0 50 100 150 Phase S21 Phase S31 (a) 埠饋入 λ /4 Σ port Δ port 1 2 3 4Frequency (GHz) 22 23 24 25 26 Angl e (Degree) -150 -100 -50 0 50 100 150 Phase S24 Phase S34 (b) 埠饋入 圖 2-8 由(a)埠 (b)埠饋入,兩輸出埠之相位變化 B. 單脈衝技術接收端天線 對於單脈衝系統的天線,本篇論文所使用的透鏡饋入天線為號角天線,利 用前述所設計之微帶陣列天線來作為號角天線的饋入[6,7]。而號角天線饋入 口的尺寸決定天線的匹配以及輻射場形;其次號角天線的高度以及開口尺寸則 決定輻射場形的特性。 圖 2-9 為兩串接之天線陣列饋入號角天線的側視圖。如圖 2-9(b),S 為饋 入之微帶天線陣列與號角天線之金屬牆之距離、h 為號角天線之高度、θ為號 角天線之金屬牆傾斜角度。以下將探討這些號角天線之尺寸對於輻射場形的影 響: (a)陣列天線饋入號角天線俯視圖
(b)陣列天線饋入號角天線側視圖 圖 2-9 接收端陣列天線饋入號角天線(a)俯視圖 (b)側視圖 1. 號角天線與金屬牆距離 固定號角天線之傾斜角度()為 37°、高度(h)為 10mm、改變號角天線 與金屬牆之距離,改變範圍由 0.5mm~3mm,另外同時將未加上號角天線之輻 射場形也放入比較。 -30 -20 -10 0 10 20 0 30 60 90 120 150 180 210 240 270 300 330 Without Horn With Horn (a) 輻射場形
-30 -20 -10 0 10 0 30 60 90 120 150 180 210 240 270 300 330 Without Horn With Horn (b) 輻射場形 圖 2-10 接收端天線有無加上金屬牆之 (a)Σ (b)Δ 輻射場形 由圖 2-10 可看出加上號角天線金屬牆後,天線之輻射場形波束寬明顯有變 窄的效果,在圖 2-10(b)輻射場形的變化尤為明顯,而從輻射場形看出 號角天線的金屬牆還具有壓抑旁波帶的功用。 h=10mm Theta=37 Sum -30 -20 -10 0 10 0 30 60 90 120 150 180 210 240 270 300 330 S=0.5mm S=1.0mm S=1.5mm S=2.0mm S=2.5mm S=3.0mm (a)Σ輻射場形
h=10mm Theta=37 Difference -30 -20 -10 0 10 0 30 60 90 120 150 180 210 240 270 300 330 S=0.5mm S=1.0mm S=1.5mm S=2.0mm S=2.5mm S=3.0mm (b)Δ輻射場形 圖 2-11 改變陣列天線與號角天線金屬牆距離之(a)Σ (b)Δ 輻射場形 圖 2-11 為改變饋入天線與金屬牆距離之比較,距離 S 對於Σ輻射場形 的影較為明顯。距離 S 愈大,則Σ輻射場形能有愈窄的波束寬。然而此影響 隨著 S 的提高將愈來愈不顯著,因此最後選擇 S 為 2mm。 2. 號角天線之高度 此項討論中,固定饋入天線與號角天線金屬牆之距離為 2mm、號角天線 金屬牆之傾斜角()為 37°,改變號角天線之高度,觀察其輻射場形之變化。 圖 2-12 為比較號角天線之金屬牆高度對輻射場形的影響,由圖 2-12(b) 可看出當高度 h 為 15mm 時有較佳的輻射場形。另外,金屬牆的高度愈高則 號角天線的開口將愈大,在一定面積下代表發送端與接收端天線將會愈靠 近,為了避免天線之間的耦合,則高度 h 不能過高;另一方面,號角天線 的金屬牆將會作為透鏡的支撐,若高度過低代表透鏡天線設計焦距過低, 則聚焦效果勢必有限。在以上兩點以及輻射場形的考慮下,選擇高度 h 為 15mm 作為最後設計。
s=1.4mm Theta=37 Sum -30 -20 -10 0 10 0 30 60 90 120 150 180 210 240 270 300 330 h=10 h=15 h=20 (a)Σ輻射場形 s=1.4mm x=37degree Difference -30 -20 -10 0 10 0 30 60 90 120 150 180 210 240 270 300 330 h=10 h=15 h=20 (b)Δ輻射場形 圖 2-12 改變接收端號角天線金屬牆高度之(a)Σ (b)Δ 輻射場形 3. 號角天線金屬牆之傾斜角度 接著討論號角天線之金屬牆傾斜角度的影響。固定饋入天線與號角天 線之金屬牆距離(S)為 2mm、也固定號角天線之高度(h)為 10mm,觀察改變
金屬側牆對輻射場形的影響。 S=1.5mm h=10mm Sum -30 -20 -10 0 10 0 30 60 90 120 150 180 210 240 270 300 330 Theta=0 Theta=15 Theta=30 Theta=37 Theta=45 Theta=60 (a)Σ輻射場形 S=1.5mm h=10mm Difference -30 -20 -10 0 10 0 30 60 90 120 150 180 210 240 270 300 330 Theta=0 Theta=15 Theta=30 Theta=37 Theta=45 Theta=60 (b)Δ輻射場形 圖 2-13 改變號角天線金屬牆傾斜角度之(a)Σ (b)Δ 輻射場形 圖 2-13 為改變金屬牆傾斜角對於天線輻射場形的影響,由圖 2-13(a) 與(b)的Σ與Δ輻射場形可發現當傾斜角為 0 度,及金屬牆與基板垂直時, 波束寬相當的大,當角度逐漸增加時,主波束寬開始逐漸變窄,與號角天 線的開口愈大,則增益愈高的理論符合。但是當角度愈大(即號角天線開
口愈大),如前所述,在固定面積中,代表發送天線與接收天線愈靠近,而 且角度對開口大小的影響較高度 h 更為顯著,為了避免接收與發送天線過 於靠近,最後選擇角度為 30 度作為設計。 s=2mm h=15mm Theta=30degree -30 -20 -10 0 10 -30 -20 -10 0 10 -30 -20 -10 0 10 -30 -20 -10 0 10 0 30 60 90 120 150 180 210 240 270 300 330 sum difference 圖 2-14 擬設計接收端天線之Σ與Δ輻射場形模擬比較 圖 2-14 為依據此節所討論,金屬牆的距離(S)、高度(h)以及傾斜角()之 影響,使用距離 S 為 2mm、高度 h 為 15mm、以及角度為 30 度,所得模擬之輻 射場形,Σ模之增益為 16.75dBi,波束寬為 36°。此圖將Σ輻射場形與Δ輻射場 形放在一起便於比較。在此設計條件下,號角天線的開口大小為 53.4mm31.92mm。 而圖 2-15(a)同樣為Σ與Δ輻射場形之比較,但僅觀察±20°以內之變化,而 圖 2-15(b)則表示Σ與Δ輻射場形之差值,單脈衝系統之振幅比較法即是以此差 值來判斷目標物之方向。
Angle (degree) -20 -10 0 10 20 Antenna Gai n (dB) -10 -5 0 5 10 15 20 Sum Difference Angle (Degree) -15 -10 -5 0 5 10 15 Dit terent Gain (dB) -5 0 5 10 15 20 25 30 (a)Σ與Δ輻射場形比較 (b)Σ與Δ輻射場形之差值 圖 2-15 擬開發天線之Σ與Δ輻射場形 (a)比較 (b)差值 圖 2-16 為接收端天線輸入反射損耗模擬結果,分別代表由埠以及埠饋 入時的輸入反射損耗。因為號角天線的金屬牆離所饋入的陣列天線足夠遠,所以 號角天線金屬牆的變化不會對天線的匹配造成影響。 Frequency (GHz) 23.50 23.75 24.00 24.25 24.50 24.75 25.00 S catteri ng P aram eter (dB) -20 -15 -10 -5 0 S11 S22 圖 2-16 接收端天線之輸入反射損耗模擬結果 系統所使用之頻寬為 24.025GHz~24.225GHz,所設計之埠與埠的饋入匹 配,其 10dB 頻寬均可含蓋所使用之頻段。
2-4.
單脈衝系統發送端天線
如圖 2-17,因為發射端不需要使用單脈衝技術,因此在饋入的陣列天線部 份,只需要一組串接陣列天線。發射端天線之號角天線金屬牆的設計如 2-3 節所 討論,金屬牆之高度 h 為 15mm、金屬牆距離 S 為 2mm、金屬牆之傾斜角度為 30 度。 圖 2-17 發射端天線結構示意圖 圖 2-18 為加上號角天線金屬牆之輻射場形,增益為 15.24Bi,3dB 波束寬為 36°。 -30 -20 -10 0 10 0 30 60 90 120 150 180 210 240 270 300 330 圖 2-18 發射端天線輻射場形模擬結果與接收端天線相同,因為號角天線之金屬牆距離饋入之微帶陣列天線有足夠 之距離(2mm),因此天線的饋入反射損耗不會受到金屬牆的影響,所以最後之反 射損耗仍與原先設計之串接微帶天線陣列相同,如圖 2-19 所示。 Frequency (GHz) 23.50 23.75 24.00 24.25 24.50 24.75 25.00 S carri ng P aram eter (dB) -25 -20 -15 -10 -5 0 圖 2-19 發射端天線反射損耗模擬結果
第三章 透鏡設計
3-1.
透鏡介紹
透鏡是一種能讓電磁波通過且其折射係數不為1的三維結構[8,9,10]。而透 鏡天線主要的目的為將點波原產生的球面波或者線波源產生的柱面波轉換成平 面波,從而求得所需的場型分佈。簡單的說透鏡天線的作用就像放大鏡,放大鏡 能將幾乎為平行波的太陽光,在其焦點處聚焦,而透鏡天線則是將饋入天線假設 為點波源或者線波源,經透鏡折射後轉換成平面波。 因此透鏡的曲率決定於透鏡之折射係數,不同的透鏡形狀將產生不同的電場 相位。 透鏡天線可分為下列兩種: 透鏡可以用折射係數 n 大於 1 的自然介質製成,也可以是由金屬柵網或金屬 片等組成的人工介質結構(n>1 或 n<1)。n=c/vε (式中 c 為光速; vε為介質 中的相速),n 大於 1 的透鏡稱為減速透鏡,n 小於 1 的透鏡稱為加速透鏡[11]。 1. 介質透鏡: 介質透鏡是藉由波行走在介質中時路徑長度增加,來調整像位,將球 面波調整為平面波。如圖 3-1 所示。 Dielectric lens Plane wave front Source or primary antenna Wave retarded Wave front 圖 3-1 介質透鏡 2. 金屬板透鏡: 金屬板透鏡則是藉由波行走在金屬平板中時路徑長度縮短,來調整像 位,將球面波調整為平面波,如圖 3-2 所示。E-plane metal plate lens Plane wave front Source or primary antenna Wave accelerated Wave front 圖 3-2 金屬板透鏡 介質透鏡與金屬板透鏡都是利用路徑長的變化,來補償路徑,達到將球面波 轉化成平面波的目的。在透鏡的選擇上,介質透鏡的製作對我們來說相對容易, 因此在本系統中,採用的方法為介質透鏡[12]。而介質透鏡在補償路徑的方式上 又可大致分為兩類: 1. 改變折射率的球面透鏡:
如圖 3-3 所示,此類的透鏡有半球狀的 Luneburg Lens 以及球狀的 Half Maxwell Fish-eye Lens,這樣的透鏡其曲面均為球面,主要是利用透鏡中介 質的變化,來達到需要的折射效果,而一般改變透鏡的介質多是使用多層不 同的材料來組成透鏡[13,14]。這樣的透鏡的優點在於對焦點位置的誤差有 相當不錯的容忍度,而其缺點也顯而易見的,不但圓球的形狀所佔體積較 大,並且在使用不同材料組成透鏡的製作方式也有相當的難度,不同介質材 料之間因製作誤差而造成的空氣層將會對效能造成影響。 圖 3-3 改變介質之介質透鏡
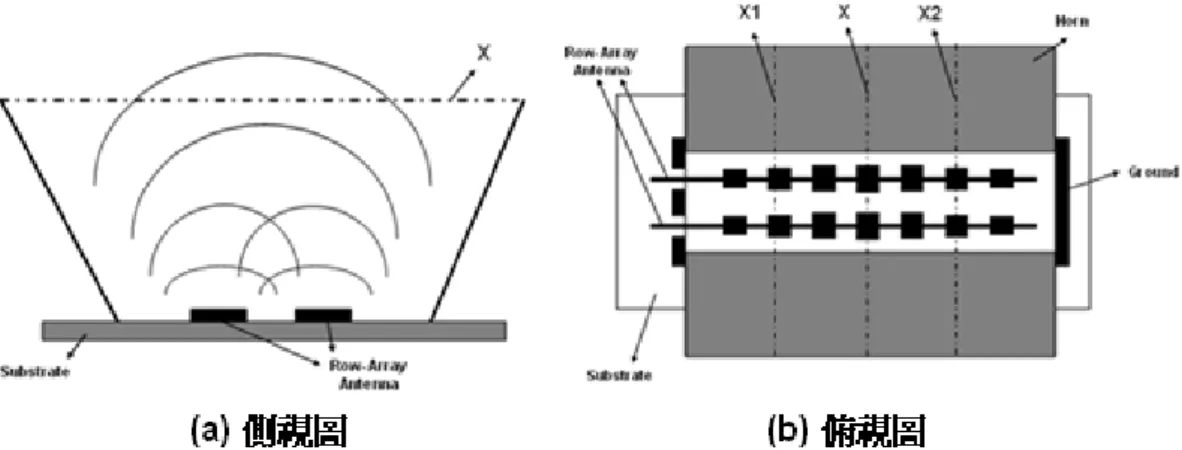
2. 改變曲率的透鏡: 這類的透鏡使用單一介質,主要藉由設計透鏡的兩個曲面來達到將波源 轉為平面波的目的。此類的透鏡種類相當繁多[15],有單設計透鏡的一個曲 面,滿足相位補償,如圖 3-4(a);也有同時設計兩個曲面[16],分別達成 改變能量分佈以及相位補償的目的,如圖 3-4(b)。 圖 3-4 改變曲率之介質透鏡 在本系統中因體積的大小佔重要的考量因素,因此選擇使用單一介質而 設計曲面的透鏡,這樣的透鏡在製作上也容易許多。 透鏡的設計原理及假設饋入天線為在相位中心的點波源(在之後的章節會討 論饋入天線與點波源的差異,以及能否是為點波源應用在此設計中),而點波源 的波前為球面波,經過透鏡調整補償路徑差,將球面波轉換成平面波。圖 3-5 中像位中心與透鏡之間距離為焦距 F,透鏡直徑為 D,透鏡中心厚度為 T。 圖 3-5 介質透鏡之光束覓跡圖
路徑長為透鏡天線設計中最重要的參數,可以寫成下列式子 1/ 2 2 2 1/ 2 2 2 1 1 2 1 2 1 2 (x y ) n(x x) (y y ) x (n1)T (3-1) 如前所提的,透鏡的形狀與透鏡所使用之材料的的折射率 n 有關,c 為真空 中的光速,而 vd為光在介質中傳播的速度 d c n v (3-2) 另外,r及r為介質中的導磁性(permittivity)及介電常數 (permittivity),k 跟λ為真空中傳波常數及波長,而k 跟d d為電磁波在介質 中之傳波常數及波長,透鏡使用介電係數(r)為 2.6 的材料,依據式 3-3 可得 知 n=1.612。 1/ 2 ( ) d r r d k n k (3-3) 在式 3-1 的路徑長中,電磁波由位於相位中心的點波源射出,在空氣中傳播 一段長度後,折射進入介電常數大於 1 的透鏡之中,再次傳播一段長度,經由第 二個曲面折射後進入空氣中變成平面波。因為參數 S 將會在式 3-1 的兩端被消 去,則焦距長度(F)就成了第一個設計條件。 第二個設計條件由斯乃爾定律(Snell’s Law)決定。將式 3-1 中的 y1對 x1微 分,則透鏡曲面則 S1上(x1,y1)點上的斜率可得: 1 1 2 1 2 1 1 2 1 1 2 1 ( ) ( ) dy nL x x L x dx L y nL y y (3-4) 其中 2 2 1/ 2 1 ( 1 1 ) L x y 2 2 1/ 2 2 [( 2 1) ( 2 1) ] L x x y y 同樣的,在透鏡曲面則 S2上的(x2,y2)點,可得其斜率為: 2 2 2 1 2 2 1 ( ) ( ) dy L n x x dx n y y (3-5) 本系統採用的透鏡的一個面為平面,而另一個面則是為補償路徑差而設計的 曲線。因此這樣的條件之下就有兩種選擇:
1. S2為平面的雙曲線透鏡: 圖 3-6 中 S2為平面。則 S1為一雙曲面,利用 S1只經過一次折射, 再利用透鏡各點的厚度差異補償路徑差。先決定所使用的透鏡需要的焦 距(F)以及透鏡尺寸(D),利用式 3-6 決定中心厚度(T),再利用式 3-8 決定透鏡的曲面分佈: 圖 3-6 S2為平面的雙曲線透鏡 2 2 1 ( 1) 1 4( 1) n D T F F n n (3-6) ( 1) cos 1 n F r n (3-7) 1/ 2 2 2 1 ( 1)( 1 ) 2( 1) ( 1 ) y n x F n F x F (3-8) 2. S1為平面的凸面透鏡: 圖 3-7 是 S1 為平面的透鏡。假設 x1=F 且S1 的斜率為無限大(垂 直),決定焦距(F)以及透鏡尺寸(D)之後,由式 3-9 可求得透鏡所需的 中心厚度(T),再利用式 3-10 及式 3-11 決定 S2的曲線。
圖 3-7 S1為平面的凸面透鏡 2 2 4 2 2( 1) F D F T n (3-9) 2 2 2 2 2 2 2 2 2 1 1 2 2 2 2 2 2 2 2 1 [( 1) ] ( 1) ( 1) n T F y n y n F n F F y x n F y n y n F (3-10) 2 2 1 2 2 2 2 1 [1 ] ( 1) x F y y n y n F (3-11) 在這兩種設計其中一個面的透鏡中,本系統選擇如圖 3-7,設計 S2而 S1為平 面的凸面透鏡(Convex Lens),此透鏡相較於設計 S1的雙曲面透鏡有兩個優點 [17]:第一個優點是因為在介質改變的面,電磁波除了依照入射角以及折射係數 的不同而發生折射外,也會有少量的電磁波會反射。如圖 3-8 所示,圖 3-8(a) 凸面透鏡兩個介質發生改變的面(S1為空氣轉為介質透鏡,S2為介質透鏡轉為空 氣),少量的反射電磁波其路徑與原本的入射路徑都不相同,換句話說,不會對 原本的路徑造成任何影響;但是,圖 3-8(b)雙曲面透鏡的兩個介質發生改變的 面,其反射的電磁波之反射路徑與原本的入射路徑相同,則反射的電磁波將會回 到原本的位於焦點饋入天線上,有可能會影響原本天線的匹配與效能。 第二個優點是因為凸面透鏡的凸面朝外,因此用於車用雷達時,若有灰塵或 雨水等附著於透鏡表面,在車輛行進時因為空氣的流動,這些附著物將容易順著
朝外的曲面被吹走,從而維持透鏡的特性,而不會因為灰塵或雨水的影響而改變 透鏡的曲率或路徑的長度。 當然,凸面透鏡也有缺點,在相同焦距與尺寸的設計條件下,凸面透鏡需要 透鏡厚度將略大於雙曲線透鏡,這意味著凸面透鏡所需要的體積也略大於雙曲面 透鏡,但是這個大小在目前的是可以接受的。 圖 3-8 透鏡的反射路徑示意圖
3-2.
透鏡設計
如 3-1 節最後所討論的,本系統選擇如圖 3-7 的凸面透鏡作為最後的設計, 且因為如圖 3-9,在 Y 方向為七個貼片天線組成之陣列天線,所以所設計之透鏡 曲線僅有 X 方向的維度,在 Y 方向並無曲率變化,換句話說,此透鏡為一圓柱形 透鏡[18]。因為饋入天線的設計是串接的微帶陣列天線饋入號角天線,而號角天 線的金屬牆高度有 15mm,在透鏡的設計上我們將號角天線的高度作為透鏡的焦 距,而號角天線的開口大小則當做透鏡的設計尺寸,意即所設計好的透鏡將能直 接蓋住號角天線的開口。 在透鏡的設計上我們必頇假設饋入天線為點波源,且位於透鏡焦點處。因此 必頇確定饋入天線的行為與點波源相同。如圖 3-9(a),我們在所設計好的號角 天線開口處,觀察饋入天線在狀態時,電磁波行走至號角天線開口時的相位變 化,所觀察的位置為圖 3-9(b)中線段 X 上的相位變化。圖 3-9 接收端天線相位觀察示意圖 圖 3-10 為在線段 X 上的相位變化,本系統所設計之號角天線的開口寬度為 31.92mm,因此橫軸為線段 X 上的位置,由-15.96mm~15.96mm;而縱軸為相位的 變化量。我們計算當饋入點是一個理想的點波源時,電磁波行走至 X 線段上的相 位分布,與我們所使用的饋入天線相比較,可發現兩者在 X 線段上的相位分布是 相當一致的。 Position (mm) -15 -10 -5 0 5 10 15 P hase ( Ra di an) -2 -1 0 1 2 3 Caculate Simulation 圖 3-10 號角天線開口模擬與計算之相位變化比較圖 除了號角天線開口正中央的相位分佈之外,我們將開口切為四等分,如圖 3-9(b)所示,同樣觀察在這等分的三條線段上的相位變化。如圖 3-11,即使再 不同位置,所設計的饋入天線在此切面上的相位分佈與理想的點波源還是相當接 近的。
P o s i t i o n ( m m ) -15 -10 -5 0 5 10 15 P hase ( Ra di an) -1 0 1 2 3 Caculation Simulation X Simulation X1 Simulation X2 圖 3-11 號角天線開口不同位置的模擬與計算之相位變化比較圖 證明饋入天線與點波源的一致性之後,可以利用 3-1 節的透鏡設計公式來設 計柱狀天線。 以號角天線之高度 15mm 為透鏡設計焦距、號角天線開口寬度 31.92mm 作為 透鏡設計尺寸,利用式 3-9 可求出凸面透鏡所需之中心厚度 T 為 11.3mm,依式 3-10 與式 3-11 求得透鏡所需之曲面分佈,而在 y 方向透鏡並於曲率,故此透鏡 為一僅在 xz 平面有曲率之柱形透鏡。而此柱形透鏡的長度為 54mm,與號角天線 的 y 方向長度相同,能剛好覆蓋號角天線開口。 然而,由 3-10 與式 3-11 所計算出的曲面是以光束覓跡,即路徑補償為基礎, 在此基礎下,透鏡的尺寸以及焦距都是數個波長甚至數十個波長,而我們所設計 的透鏡尺寸為 2.6 個波長,焦距甚至僅有 1.2 個波長,在如此小的尺寸下,使用 光學方式所設計出的透鏡是否仍有集中波束且增加增益的效果,必頇經過全波軟 體來模擬驗證。 此架構因過於龐大,難以使用全波軟體來模擬驗證,因此我們將接收端天線 的饋入陣列天線縮減,僅用一個貼片天線單元來取代一個天線陣列,亦即用兩個 天線單元取代接收端天線的兩個天線陣列。當然,天線單元的位置,號角天線金 屬牆距離天線單元的距離,號角天線的高度均與原本的陣列天線相同,僅有號角 天線的長度(y 軸方向的長度)縮減為恰好能包圍一個天線單元的長度。因貼片天 線單元的位置與原本的天線陣列相同,固相位中心不會改變,透鏡的曲率依照
3-10 與式 3-11 之設計,而此柱形透鏡的長度縮減為此時號角天線的長度,則此 時整體之天線結構尺寸大為縮減,足夠用全波軟體來模擬,觀察其趨勢。 Sum -30 -25 -20 -15 -10 -5 0 5 10 0 30 60 90 120 150 180 210 240 270 300 330 Withput Lens With Lens 圖 3-12 有無透鏡之模輻射場型模擬比較 Difference -30 -25 -20 -15 -10 -5 0 5 10 0 30 60 90 120 150 180 210 240 270 300 330 Without Lens With Lens 圖 3-13 有無透鏡之模輻射場型模擬比較
由圖 3-12 與圖 3-13 為是否加上透鏡之接收端天線模與模輻射場形。加 上透鏡之後,即便是在透鏡的尺寸與焦距都僅有 1~3 個波長的情況下,透鏡仍有 集中波束與增加增益的效果。然而可預期的,在加上透鏡的模輻射場形很有可 能會有旁波束出現,但因為此旁波束的角度已在±30°之外,而我們應用的偵測範 圍並不會超過±25°,此旁波束的位置超出我們的應用範圍,並不會影響此應用。 圖 3-14 為所設計透鏡之三視圖,曲率依照 3-10 與式 3-11 設計,則 x 方向 長度為 31.92mm,與號角天線寬度相同;而透鏡 y 方向長度為 54mm,與號角天線 長度相同,固此柱形透鏡剛好能蓋住號角開口。圖 3-15 為透鏡實體照片。 (a)正面 (b)背面 (c)側面 圖 3-14 圓柱狀透鏡三視圖 圖 3-15 柱狀透鏡照片
第四章 透鏡天線整合與量測
4-1.
24GHz 垂直傳輸線
本系統所設計的電路面積為 94mm94mm,為了節省面積,本系統之天線選 擇與雷達收發器模組分開,而天線與雷達收發器模組的連接,利用多層板製作常 運用的垂直傳輸技術來完成,因此天線所能使用的面積必頇配合電路的尺寸,即 包含發送以及接收端天線之最大面積為 94mm94mm。 一般常用的垂直傳輸技術多是使用通路孔(viahole)來連接不同面的電路, 然而當操作頻率逐漸提高時,通路孔的操作頻寬將愈來愈低,而插入損失也會逐 漸大到無法忍受。為了解決此問題,我們採用槽孔耦合(Cavity Coupler)這種非 連接式垂直傳輸技術[19,20],其結構如圖 4-1 所示。 圖 4-1 槽孔耦合結構圖 如圖,兩塊連接之電路板之間夾著一塊金屬板,金屬板上開一道槽孔,兩塊 電路板均由微帶線饋入,兩塊電路板的地面也都各開一道與金屬板槽孔相同尺寸 的耦合縫隙,訊號由電路板上的微帶線經過地面耦合縫隙與金屬板的槽孔,耦合 至另一面電路板的微帶線。使用槽孔耦合有兩種操作方式:第一種是操作在共振模態,將金屬槽孔當作 波導管來使用,此時的操作頻率需要愈低愈好,因此一般會在金屬槽孔中填滿介 質來縮減槽孔尺寸;第二種方式是操作在非共振模態,此種方式的製作上對我們 而言較為方便,因此採用第二種方式。 操作在非共振模態,為了讓操作頻寬足夠大,必頇將槽孔的第一共振頻率設 計在相對於系統操作頻率而言非常高的頻率。金屬槽孔的尺寸與金屬板的厚度對 耦合的效果都有相當大的影響,其設計參數如表 4-1。 ( ) c s wc(ws) t c w m t s t rs rc 5.1 0.7 1.5 0.46 0.2032 0.5 3.38 1.0 表 4-1 槽孔耦合式垂直傳輸線設計參數
使用的電路板基板板材為 Rogers RO4003(r 3.38,Thickness8mil),而表 4.1 之參數所設計之金屬槽孔,槽孔中填滿空氣時之共振頻率為 104GHz。圖 4-2 為電磁軟體 HFSS 的模擬結果與量測結果。S21 的模擬結果在 22~26GHz 的頻段都 落在 0.7dB 附近。而量測的結果 S21 也大致上與模擬吻合,約落在 0.8dB 附近。 Frequency (GHz) 22 23 24 25 26 S -Param eter (dB) -70 -60 -50 -40 -30 -20 -10 0 S21(measurement) S11(simulation) S21(simulation) 圖 4-2 槽孔耦合 S 參數模擬與量測結果 利用槽孔耦合的垂直傳輸線是兩塊電路透過中間金屬板的槽孔來偶合傳 輸,所以必頇考慮安裝時產生的對位誤差最訊號的傳輸特性的影響。圖 4-3 為槽 孔兩端之傳輸線對於對位偏移的影響,在實作上我們利用 M2(直徑 2mm)的螺絲孔
來做定位孔,因此考慮之偏移誤差在 Y 方向 1mm 之內,在此偏移範圍之內所模擬 之槽孔耦合的插入損失仍維持在 1dB 之內,因此因為電路對位而造成的影響仍在 可接受範圍之內 Frequency (GHz) 22 23 24 25 26 Insertion loss (dB) -5 -4 -3 -2 -1 0 offset_0.3mm offset_0.5mm offset_0.7mm offset_1.0mm 圖 4-3 對位偏移對槽孔耦合效果之影響
4-2.
天線整合量測
圖 4-4 為天線實做照片。如 4-1 節所述,接收與發射端天線如圖 4-4(a)所 示,兩天線中心相距 50mm,而射頻電路模組如圖 4-4(b)所示(僅以枝幹耦合器 等饋入電路作為代表),天線與電路分別至於兩塊電路板,兩者之間以槽孔耦合 之垂直傳輸技術連接,在槽孔附近佈上數個直徑為 2mm 的圓孔,一方面當作電路 板與金屬板槽孔的對位用,另一方面可用螺絲逼緊,使電路與金屬板緊密貼合, 確保垂直傳輸的特性。 圖 4-4 天線與槽孔耦合饋入照片圖 4-5 為接收端天線之反射損耗圖,S11 代表埠反射損耗、S22 則代表埠 反射損耗。兩者之 10dB 反射損耗均可含蓋此雷達系統所需之 24.025~24.225GHz 頻寬。 圖 4-6 與圖 4-7 為尚未加上圓柱形透鏡之接收端天線之與輻射場形。為 了能夠單獨測量此天線之輻射場形,在實際應用之電路以外兩埠都分別多加了長 度為 48mm 的傳輸線,以便於接上量測用接頭。經過測量,此長度之傳輸線在中 新頻率 24.125GH 時的損耗為 2.8dB,因此經過校正後,接收端天線之模輻射 場型如圖 4-6 所示,增益為 15.6dBi,3dB 波束寬為 35°;而模輻射場型如圖 4-7 所示,增益於-20°為 13.56dBi,於 20°為 12.9dBi。 圖 4-8 為與輻射場形之比較。由於單脈衝雷達技術的振福比較法必頇依 靠模與模兩種輻射場形來判斷目標物所在之角度,因此圖 4-9 表示在±20°以 內兩輻射場形的比值關係,左縱坐標代表在±20°以內兩種輻射場型之增益,而右 縱坐標則代表兩輻射場形的比值大小。 Frequency (GHz) 23.0 23.5 24.0 24.5 25.0 25.5 S carri ng P aram eter (dB) -30 -25 -20 -15 -10 -5 0 S11 S22 圖 4-5 接收端天線之量測反射損耗圖
-30 -20 -10 0 10 0 30 60 90 120 150 180 210 240 270 300 330 圖 4-6 接收端天線未加透鏡之輻射場形 -30 -20 -10 0 10 0 30 60 90 120 150 180 210 240 270 300 330 圖 4-7 接收端天線未加透鏡之輻射場形
-30 -20 -10 0 10 0 30 60 90 120 150 180 210 240 270 300 330 圖 4-8 接收端天線未加透鏡之輻射場形比較 Angle (degree) -20 -15 -10 -5 0 5 10 15 20 Antenn a Gai n (dBi) -15 -10 -5 0 5 10 15 20 25 30 Differen t Ga in (dB) -15 -10 -5 0 5 10 15 20 25 30 Sum Difference Different Gain 圖 4-9 接收端天線未加透鏡之輻射場形比值 由於圓柱形透鏡焦距與號角天線金屬牆高度同為 15mm,為 24GHz 的 1.2λ, 對於饋入天線並無影響,加上圓柱形透鏡後並不會改變天線的匹配,因此此時接 收端天線的反射損耗與圖 4-5 相同。 圖 4-10 與圖 4-11 為 3-2 節提到之簡化結構之全波模擬。在模擬方面,無論 是模或者模輻射場形都有增加增益與集中波束之效果,因此在實際加上透鏡
的輻射場形也會有預期的效果。另外,在模輻射場形雖有旁波束被擠壓出來, 但旁波束出現在±35°以外,在 30 公尺的前視應用中,所需要之偵測角度不會超 過±25°,因此加上透鏡所擠壓出的旁波束將不會對此應用造成影響。 Sum -30 -25 -20 -15 -10 -5 0 5 10 0 30 60 90 120 150 180 210 240 270 300 330 Withput Lens With Lens 圖 4-10 有無透鏡之模輻射場型模擬比較 Difference -30 -25 -20 -15 -10 -5 0 5 10 0 30 60 90 120 150 180 210 240 270 300 330 Without Lens With Lens 圖 4-11 有無透鏡之模輻射場型模擬比較
圖 4-12 與圖 4-13 為加上圓柱形透鏡之接收端天線之模與模輻射場形。 同樣經過傳輸線的校正後,接收端天線之模輻射場型如圖 4-12 所示,結果確 實增益有所增加,為 16.84dBi,3dB 波束寬也如預期有所減少,為 25°。 輻射場型如圖 4-13 所示,加上圓柱形透鏡之後,輻射場形也如預期在兩 側擠壓出旁波束,但是如前所提,在應用中有效的比較角度並不會超過±25°,之 外的角度兩輻射場形的比值變化趨於緩和,以無法準確分辨角度,因此擠壓出的 旁波束並不會對此應用造成影響。而輻射場型增益也有所增加,於-15°為 14.96dBi,於 15°為 14.7dBi。 圖 4-14 為與輻射場形之比較。圖 4-15 表示在±20°以內兩輻射場形以及 比值關係,左縱坐標代表在±20°以內兩種輻射場型之增益,而右縱坐標則代表兩 輻射場形的比值大小。 -30 -20 -10 0 10 0 30 60 90 120 150 180 210 240 270 300 330 圖 4-12 接收端天線加透鏡之輻射場形
-30 -20 -10 0 10 0 30 60 90 120 150 180 210 240 270 300 330 圖 4-13 接收端天線加透鏡之輻射場形 -30 -20 -10 0 10 0 30 60 90 120 150 180 210 240 270 300 330 Sum Difference 圖 4-14 接收端天線加透鏡之輻射場形比較
Angle (Degree) -20 -10 0 10 20 Antenn a Gai n (dBi) -15 -10 -5 0 5 10 15 20 25 30 D iffe re nt Ga in (dB ) -15 -10 -5 0 5 10 15 20 25 30 Sum Difference Different Gain 圖 4-15 接收端天線加透鏡之輻射場形比值 圖 4-15 為與輻射場形比值,雖然在理論上振幅比較法只要與輻射 場形均足夠對稱,就能依據所設計好的比值來判斷目標物角度。但是在實際應用 上,會因為電路架構上造成的誤差以及使用環境影響,無法非常準確的判斷角 度。因此實際的目標物測量與分析將在第五章介紹。 圖 4-16 為發射端天線之反射損耗圖,10dB 反射損耗落於 23.69GHz~24.43GHz,可以含蓋此雷達系統使用的 24.025GHz~24.225GHz。 Frequency (GHz) 23.0 23.5 24.0 24.5 25.0 25.5 S carri ng P aram eter (dB) -50 -40 -30 -20 -10 0 圖 4-16 發射端天線之量測反射損耗圖
圖 4-17 為發射端天線之輻射場型。天線增益為 14.34dBi,波束寬為 35°。 -30 -20 -10 0 10 0 30 60 90 120 150 180 210 240 270 300 330 圖 4-17 發射端天線輻射場形 圖 4-18 表示接收端天線在模與模時與發射端天線的隔離度,兩者都可 以維持在 40dB 之下,這是由於接收與發射端均使用號角天線,藉由號角天線的 金屬牆來增加隔離度。 Frequency (GHz) 22 23 24 25 26 S catt ing P aramet er (dB ) -60 -50 -40 -30 -20 -10 0
Sum mode Isolation Diff. mode Isolation
第五章 單脈衝雷達系統整合量測與討論
因為天線系統為學生賴浩宇製作,雷達射頻模組的電路由學生許少華所製 作,整合後共同量測。因此本章節為學生賴浩宇與許少華合作完成。5-1.
雷達量測與討論
圖 5.1 為 24GHz 連續調頻&單脈衝雷達的射頻電路與天線實際照片,整個雷 達射頻模組的外觀尺寸約為 94mm94mm17mm(透鏡額外佔11mm 之高度)。圖 5.1(a)顯示金屬體一端的的電路包括了所有從 6~24GHz 的射頻電路,其中包括 VCO、兩個倍頻器、兩個 12GHz 放大器、一個 24GHz 的功率放大器與兩個 24GHz 低雜訊放大器、三個濾波器、兩個混頻器[21,22,23]。在金屬薄板的另一端放置 24GHz 的收發天線,如圖 5.1(b)。射頻電路產生我們所需要的頻率調變波,透過 天線陣列輻射出去。當有目標物時,發送出去的訊號將被反射回來,被反射的回 波由接收端的天線陣列接收下來後,經過被動、主動元件的處理後,使用示波器 量測Σ模與Δ模的訊號比值及頻率。 基頻(baseband)電路與微控制器(MCU)組成的數位訊號處理模組,其中包含 中頻信號的放大器、單晶片的控制,此塊電路板主要的功能是在利用微控制器產 生隨時間改變的電壓值,進一步控制壓控震盪器來改變射頻的調變波形與控制射 頻模組輸出功率[24]。 (a)射頻電路模組 (b)雷達之收發天線系統 圖 5.1 雷達系統照片圖 5.2 數位訊號處理模組照片 圖 5.3 雷達量測環境與架設照片 圖 5.3 為雷達量測環境與架設照片,雷達掃頻頻率為 24.025~24.225GHz, 週期為 3.73 毫秒(ms)。使用數位訊號處理器,如圖 5.2,送出三角波到射頻電 路由發送端天線發射出去。接收端天線接收回波,經過低雜訊放大器、混頻器與 中頻放大後。使用示波器來比較Σ模與Δ模信號的比值與頻率[25]。測量物體為 直徑 30 公分的金屬圓桶與小型車輛。我們分別將金屬圓桶與小型轎車擺置於不 同距離,並量出模與模信號在不同角度的比值。以及在 15 公尺距離時金屬 圓桶在正負 6°與 0°時,與相位關係圖以及比值。
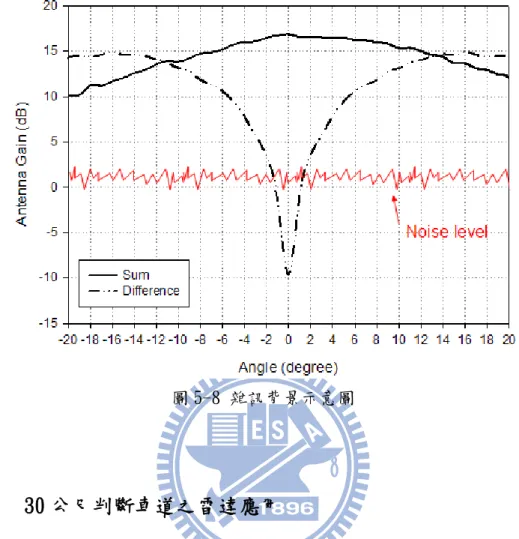
圖 5.4 為以直徑 30cm 之圓桶為目標物,距離雷達 15 公尺時,圓桶在正負 6 °與 0°時,示波器所量測到的結果,當圓桶在 6°時,與Δ相位相同;-6°時, 與相位差了 180°;而 0°時,只剩有弦波訊號。這三張圖的頻率都為 11KHz, 與理論值計算出的 10.7KHz 相差無幾,這都相當符合理論的情況。此外此套雷達 對於相同目標物,模測到的最大訊號約較模測得的最大訊號少 2dB,又天線 之模實際增益較模多 2dB,因此在做不同角度與比值圖時,需先加上 4dB 來校正接收兩路的差異性。 圖 5.5 與圖 5.6 為量測圓桶與轎車在不同距離,角度從-20°~20°的與比 值圖,大致上不同距離比值的趨勢是一樣的,特別注意到的是,不管是圓桶或轎 車,距離為 10 公尺的 0°附近曲線都會稍微胖一點,這是因為在近距離的時候, 圓桶與車子都不能視為一個單點的物體,示意圖如圖 5.7。圖 5.7 為雷達偵測車 輛之電場對角度的關係圖,縱軸表示雷達所偵測之車輛之回波的電場大小,橫軸 表示天線波束之角度,在距離 10 公尺處,車輛所含蓋的角度約為 8°,因此我們 將車輛中心至於-1°處,含蓋角度為-5°~+3°,因為模之電場在正負角度相位相 反,因此回波之電場將會抵消,而模之電場相位相同,因此會累加。經過計算, 在-1°時的模電場大小為 14.12,而模為 1.63;但是含蓋角度為-5°~+3°之內 的模電場大小平均為 14,而模為 1,比較之下,模與模的差距拉大了。 而在距離較遠時,車輛將越接近一個點,因此所得到的曲線將會逐漸接近天線之 輻射場型所比較的結果,因此圖 5-6 在±5°之內,近距離之曲線較遠距離稍為胖 一點是合理的。 另外,無論圓桶或小型轎車,在 0°時不同距離的與比值皆無法達到 20dB 以上,這是因為 0°附近時,的訊號已經小於背景雜訊,此時Σ與的比值就變 成Σ與背景雜訊比值,導致比值下降。此外,當物體比較遠的時候,回波量比近 距離小,而背景雜訊的值是固定的,因此不管是圓桶或車子在 30 公尺 0°附近時, 比值都縮小,如圖 5-8。
圖 5.4 圓桶距雷達 15 公尺之與相位關係圖 Metal Cylinder Angle (degree) -20 -10 0 10 20 R atio ( dB) -10 -5 0 5 10 15 20 10M 15M 30M 圖 5.5 不同距離下-20~20°之與訊號比值圖(圓桶)
Car Angle (degree) -20 -10 0 10 20 Ratio (dB) -5 0 5 10 15 20 10M 20M 30M 圖 5.6 不同距離下-20~20°之與訊號比值圖(小型車輛) 圖 5.7 等效偵測角度偏移示意圖
圖 5-8 雜訊背景示意圖
5-2.
30 公尺判斷車道之雷達應用
從 3.1 節的雷達量測與討論中,我們得知實際量測到的雷達效能是與理論值 有些許的不同,這些值或多或少都會造成雷達某些程度的誤判。端看如何將雷達 作何種運用。 此篇論文所提出的 30 公尺判斷車道之應用,示意圖如 3.8,首先我們將雷 達的偵測角度區分成主要三塊:正負 3.3 度(本車道)、7 ~ 23 度(右方車道)與 -7 ~ -23 度(左方車道)。透過這樣的角度選擇,雷達在判斷車道的錯誤機率,便有 緩衝的空間,可緩衝的Σ與Δ訊號比值約為 4dB,如圖 3.9 中的非陰影區域。 此外,緩衝區在 10~20 公尺時大部分面積落於本車道;在 20~30 公尺時,大部份 面積位於旁車道。 當雷達打出連續調頻波,訊號碰到物體反射,再由雷達的接收後,計算出Σ 與Δ的比值與頻率後,根據所劃分的角度,便可判斷前方車體是在多少距離的本 車道、左方或右方車道。假使比值落於緩衝區,物體距離為 10~20 公尺之間,則 判斷為本車道;物體距離為 20~30 公尺之間,则判斷為左方或右方車道。圖 5.9 偵測角度劃分與緩衝區域示意圖
第六章 結論
本論文設計一個可以應用在 24-GHz 單脈衝前視防撞警示雷達之透鏡天線系 統,包含接收與發射天線,操作頻段為 24.025GHZ~24.225GHz。此天線系統使用 以貼片陣列天線為饋入的號角天線為架構,並且再接收天線端以光學方式設計透 鏡,搭配成為透鏡天線,並且驗證在僅 1~3 個波長的尺寸下依光學方式設計之透 鏡仍有相當的作用,且達成小體積的目的。而使用號角天線為架構,具有集中 模場型波束、壓抑模輻射場形的旁波束之效果,同時能作為透鏡天線的支撐, 另外,號角天線的金屬牆還能夠有效的增加接收與發送天線之間的隔離度。 最後,我們將所設計的天線與許少華同學設計的前端電路做整合,實際測量 此雷達系統在不同距離與不同角度,對於金屬圓桶與小型車輛等目標物的回波 量,與所設計的天線場形對應比較與分析。並預定將此雷達系統作為 30 公尺前 視防撞之應用,利用單脈衝振幅比較來分辨角度之功能,將車道分為本車道與左 右車道等三個區域,並驗證應用的可行性。參考文獻
[1] W. Kolosowski, E. Sedek, M. Borejko, and A. Jeziorski, “Monopulse IFF antennas,” in Microw. Radar and Wireless Communications, 2008. MIKON 2008.
17th International Conf., May 2008, pp. 1-4.
[2] Junho Cha and Yasuo Kuga, “A mechanically steerable array antenna using controllable dielectric phase shifters for 77 GHz automotive radar systems,” in Proc.
IEEE AP-S Int. Symp., Jul. 2006, pp. 859-862.
[3] W. L. Stutzman and G. A. Thiele, Antenna Theory and Design, 2nd ed. New York:Wiley, 1998.
[4] K. R. Carver, “Microstrip antenna technology,” IEEE Trans. Antennas Propag., vol. 29, pp. 2-24, Jan. 1981.
[5] 鄭怡力,車用前視防撞雷達之可切換波束天線陣列,碩士論文,國立交通大 學,2004。
[6] S. K. Sharma, L. Shafai, B. Balaji, A. Damini, and G. Haslam, “Multimode feed horn providing multiphase centres with offset reflector antenna,” in Proc. IEEE AP-S
Int. Symp., Jul. 2005, pp. 355-358.
[7] S. K. Sharma, L. Shafai, B. Balaji, and A. Damini, “Beam scanning characteristics of an offset reflector by lateral displacements of multimode feed horn arrays for space borne radar,” in Proc. IEEE AP-S Int. Symp., Jul. 2006, pp. 4335-4338.
[8] 洪傳恩,24GHz 車輛前視防撞警示雷達之高增益透鏡天線開發,碩士論文, 國立交通大學,2008。
[9] L. Schulwitz and A. Mortazawi, “A Monopulse Rotman lens phased array for enhanced angular resolution,” in IEEE MTT-S Int. Microw. Symp. Dig., Jun. 2007, pp.1871-1874.
[10] N. T. Nguyen and R. Sauleau, “Beam diversity techniques based on Integrated Lens Antennas fed by beam-switching linear and planar printed antenna sub-arrays,” in Proc. IEEE AP-S Int. Symp., Jul. 2008, pp. 1-4.
![圖 3-7 S 1 為平面的凸面透鏡 2 2 4 2 2( 1)FD FTn (3-9) 2 2 2 2 2 2 2 2 211 2 2 2 2 2 2 2 2 1[(1) ] ( 1)( 1)nTFyny n F n F F yxnFynyn F (3-10) 2 2 1 2 2 2 2 1[1 ](1)xFyynyn F (3-11) 在這兩種](https://thumb-ap.123doks.com/thumbv2/9libinfo/7493527.115578/40.892.182.749.108.754/為平面透鏡兩種.webp)
![圖 5.2 數位訊號處理模組照片 圖 5.3 雷達量測環境與架設照片 圖 5.3 為雷達量測環境與架設照片,雷達掃頻頻率為 24.025~24.225GHz, 週期為 3.73 毫秒(ms)。使用數位訊號處理器,如圖 5.2,送出三角波到射頻電 路由發送端天線發射出去。接收端天線接收回波,經過低雜訊放大器、混頻器與 中頻放大後。使用示波器來比較Σ模與Δ模信號的比值與頻率[25]。測量物體為 直徑 30 公分的金屬圓桶與小型車輛。我們分別將金屬圓桶與小型轎車擺置於不 同距離,並量出 模與 ](https://thumb-ap.123doks.com/thumbv2/9libinfo/7493527.115578/58.892.261.629.112.388/回波經過低雜訊放大器混頻器與中頻放大後使用示波器來比ΣΔ.webp)