利用多晶矽於絕緣層之基底建立中心凸塊結構之壓力感測元件
99
0
0
全文
(2) 利用多晶矽於絕緣層之基底建立中心凸塊結構之壓力感測元件 Center Boss Pressure Sensor Based on Poly-Si-on-Insulator Structure. 研究生:丁沛熙. Student:Pei-Hsi Ting. 指導教授:黃宇中 博士. Advisor:Dr. Yu-Chung Huang. 國 立 交 通 大 學 電 子 工 程 學 系 電 子 研 究 所 碩 士 班 碩 士 論 文 A Thesis Submitted to Department of Electronics Engineering and Institute of Electronics College of Electrical Engineering and Computer Science National Chiao Tung University in partial Fulfillment of the Requirements for the Degree of Master in Electronics Engineering. June 2004. Hsinchu, Taiwan, Republic of China. 中華民國九十三年六月.
(3) 國. 立. 交. 通. 大. 學. 博碩士論文著作權授權書 (提供授權人裝訂於紙本論文中書名頁之次頁用). 本授權書所授權之論文為本人在國立交通大學(學院)電子工程系所 學年度第 二 學期取得碩士學位之論文。. 固態. 組, 92. 論文名稱:利用多晶矽於絕緣層之基底建立中心凸塊結構之壓力感測元件 指導教授:黃宇中 ■ 同意. □ 不同意 (國科會科學技術資料中心重製上網). 本人具有著作財產權之上列論文全文(含摘要)資料,授予行政院國家科學委員會科學技術資 料中心(或改制後之機構),得不限地域、時間與次數以微縮、光碟或數位化等各種方式重製 後散布發行或上載網路。 本論文為本人向經濟部智慧財產局申請專利(未申請者本條款請不予理會)的附件之一,申請 文號為:______________,註明文號者請將全文資料延後半年再公開。 ■ 同意. □ 不同意 (圖書館紙本影印). 本人具有著作財產權之上列論文全文(含摘要)資料,授予教育部指定送繳之圖書館及國立交 通大學圖書館,基於推動讀者間「資源共享、互惠合作」之理念,與回饋社會及學術研究之 目的,教育部指定送繳之圖書館及國立交通大學圖書館得以紙本收錄、重製與利用;於著作 權法合理使用範圍內,不限地域與時間,讀者得進行閱覽或列印。 本論文為本人向經濟部智慧財產局申請專利(未申請者本條款請不予理會)的附件之一,申請 文號為:______________,註明文號者請將全文資料延後半年再公開。 ■ 同意 本人具有著作財產權之上列論文全文(含摘要),授予國立交通大學與台灣聯合大學系統圖書 館,基於推動讀者間「資源共享、互惠合作」之理念,與回饋社會及學術研究之目的,國立 交通大學圖書館及台灣聯合大學系統圖書館得不限地域、時間與次數,以微縮、光碟或其他 各種數位化方式將上列論文重製,並得將數位化之上列論文及論文電子檔以上載網路方式, 於著作權法合理使用範圍內,讀者得進行線上檢索、閱覽、下載或列印。 論文全文上載網路公開之範圍及時間: 本校及台灣聯合大學系統區域網路. ■ 中華民國 98 年 6 月 29 日公開. 校外網際網路. ■ 中華民國 98 年 6 月 29 日公開. 上述授權內容均無須訂立讓與及授權契約書。依本授權之發行權為非專屬性發行權利。依本授權所為之 收錄、重製、發行及學術研發利用均為無償。上述同意與不同意之欄位若未勾選,本人同意視同授權。. 研究生:丁沛熙. 學號:9011574. 親筆正楷:________________ (務必填寫) 中華民國. 93. 年. 6. 月. 30. 日.
(4) 國家圖書館 博碩士論文電子檔案上網授權書 (提供授權人裝訂於紙本論文中博碩士論文授權書之次頁用). 本授權書所授權之論文為本人在國立交通大學(學院)電子工程系所 固態 組, 92 學年度第 二 學期取得碩士學位之論文。 論文名稱:利用多晶矽於絕緣層之基底建立中心凸塊結構之壓力感測元 件 指導教授:黃宇中 ■ 同意 本人具有著作財產權之上列論文全文(含摘要),以非專屬、無償授權國 家圖書館,不限地域、時間與次數,以微縮、光碟或其他各種數位化方 式將上列論文重製,並得將數位化之上列論文及論文電子檔以上載網路 方式,提供讀者基於個人非營利性質之線上檢索、閱覽、下載或列印。 上述授權內容均無須訂立讓與及授權契約書。依本授權之發行權為非專 屬性發行權利。依本授權所為之收錄、重製、發行及學術研發利用均為 無償。上述同意與不同意之欄位若未勾選,本人同意視同授權。 研究生:丁沛熙. 學號:9011574. 親筆正楷:________________ (務必填寫) 中華民國. 93. 年. 6. 月. 30. 日. 本授權書請以黑筆撰寫,並列印二份,其中一份影印裝訂於附錄三之一(博碩士論文授權書)之次 頁﹔另一份於辦理離校時繳交給系所助理,由圖書館彙總寄交國家圖書館。.
(5)
(6) 利用多晶矽於絕緣層之基底建立中心凸塊結構之 壓力感測元件 研究生:丁沛熙. 指導教授:黃宇中. 博士. 國立交通大學電子工程學系電子研究所碩士班. 摘要 在傳統矽型壓阻式壓力感測元件,若要做接觸力感測時通常需要使用 額外的封裝方式間接讓元件感應接觸力,此外在量測微小力時橫向應力不 可忽略,此力導致傳統矽壓力元件在感測極微小力時線性度下滑而無法精 準量測。在本篇論文將運用中心凸塊作為接觸力導引結構,可將接觸力直 接施於晶片上,不需要使用特別的封裝方法即可解決感測接觸力的問題。 在本論文中將由理論及有限元素分析方法推導撓度與應力,以此結果改良 應變規的擺設,讓應變規間橫向應力相互抵消,增加元件對微小力的線性 度。除此外中心凸塊亦可減少結構上應力集中,使結構能支撐更大的力, 增加元件的量測範圍。文中將提出一簡易的覆晶封裝方法來封裝所設計的 元件,此封裝方式將非常適合應用在我們所設計的微力感測元件。. 關鍵字:接觸力、壓力、中心凸塊、覆晶封裝 i.
(7) Center Boss Pressure Sensor Based on Poly-Si-on-Insulator Structure Student:Pai-Hsi Ting. Advisor:Dr. Yu-Chung Huang. Department of Electronics Engineering and Institute of Electronics National Chiao Tung University. Abstract A piezoresistive sensor that is capable of measurement of normal contact force, the greater linearity at small force and the larger working range is proposed in this thesis. With a circular membrane as a sensing structure and a center boss as a force-conducting structure, the proposed sensor can be fabricated as a whole without an complicated package to provide force conducting structures. By the analytic solutions for the distribution of the deflection and the longitudinal/transverse stress of the sensor, it is obtained that the massing stress was dispersed and transverse stress in the four piezoresistors was balance in this structure. It assists the sensor in increasing the linearity and the limited force. Moreover, a Flip-Chip assembly of the tactile sensor is also described in this thesis to make the sensor more reliable in a practical use.. Keyword : contact force, pressure, center boss, Flip-Chip. ii.
(8) 誌謝 我常以為,學如逆水行舟,而今輕舟已過萬重山。一路走來點滴在心, 因此下筆的此刻已經預料到,這將是一篇沉長的謝詞,雖然這不是一篇完 美的論文,但這部論文的完成,要感謝的人真的很多,僅以此文表達我誠 摯的謝意。 首先要感謝黃宇中老師的諄諄教誨及包容,在我思想困頓的時候適時 指引我方向,還要感謝三位口試委員的指正與協助,使我獲益良多。在此 特別感謝徐文祥老師及其實驗室的成員,在實驗上極需協助的同時伸出援 手。感謝博士班張煒旭學長,在我實驗的同時點出許多我未考慮到的問題, 使我的實驗能順利完成。感謝鍾君煒學長,在微機電儀器上的協助。感謝 林稔杰學長在製程模擬軟體以及有限元素分析軟體上的幫忙。感謝交大奈 米中心博愛校區技術員的范揚禎先生熱心協助,讓我能快速完成許多道實 驗,亦感謝蝕刻系統技術員徐秀巒小姐、爐管系統技術員黃月美小姐、黃 光室陳悅婷小姐與光罩室的葉雙得先生,在製程與光罩製作上的協助,讓 我本來進度落後的實驗部份如期完成。此外亦要感謝台大奈米機電中心魏 中聖博士和台大應力所博士班陳建甫學長在深蝕刻製程的鼎力協助,常花 費他一次又一次的時間測試,甚為感激。還有感謝中正大學電機碩士班的 許家豪、交通大學電信所博士班蘇珍儀在製作印刷電路板與打線上的協 助,並借貴所的儀器協助我量測,本論文有如此精準的製作與量測結果, 都是你們的功勞。 在碩一剛入學,對實驗狀況完全無法掌握的時候,感謝方淳泓學長熱 心指導與提攜,同時感謝學弟郭定隆、張躍瀚學弟,在課業與實驗上相互 砥礪,還有感謝郭耿誌、易育聖在積體電路設計上的指教,感謝朱濟群學 iii.
(9) 長在人生與生涯規劃的指引。還要感謝最要好的死黨,中華大學電機系沈 信賢和逢甲大學財稅系的范令瑜同學,在一年級初次趟入這陌生的環境時 協助我認識新竹,以及我要感謝大葉大學電機所的蔡秉諺同學,在我求學 生涯最佳的死黨與玩伴,給我永遠難忘的環島。挂 一 漏 萬 , 可 能 尚 有 一 些 未 提 及 的 朋 友 們,在 此 均 一 併 致 謝。最後,最要感謝的莫過於我的家 人和我的女友,在我最失意的時候有他們的鼓勵,最煩悶的時候有他們的 包容,此無形的力量使我能更堅強的邁進。 徐徐和風,田田荷葉,夏日的交大校園顯得分外恬靜,只剩枝 葉婆娑,彷彿正迎接下批新學子的到來。千里聚首終須一別,彩雲 片片已長留我心。此行不虛!. iv.
(10) 目. 錄. 中文摘要…………………………………………………………………… 英文摘要…………………………………………………………………… 誌謝………………………………………………………………………… 目錄………………………………………………………………………… 表目錄……………………………………………………………………… 圖目錄……………………………………………………………………… 符號說明……………………………………………………………………. i ii iii v vii viii x. 一、緒論…………………………………………………………………… 1.1 文獻回顧………………………………………………………… 1.2 本文架構…………………………………………………………. 1 1 5. 二、主要製程技術簡介…………………………………………………… 2.1 微影技術…………………………………………………………… 2.2 熱養化製程………………………………………………………… 2.3 薄膜沉積技術……………………………………………………… 2.3.1 物理氣相沉積……………………………………………… 2.3.2 化學氣相沉積……………………………………………… 2.4 蝕刻………………………………………………………………… 2.4.1 濕式蝕刻…………………………………………………… 2.4.2 乾式蝕刻…………………………………………………… 2.5 離子佈植……………………………………………………………. 6 7 8 10 10 11 14 14 17 19. 三、壓阻式壓力感測器之原理……………………………………………… 3.1 微力感測器工作基本原理………………………………………… 3.2 分析施力於薄板造成的形變與應力……………………………… 3.2.1 壓力模式…………………………………………………… 3.2.2 接觸力模式………………………………………………… 3.3 壓阻特性與原理…………………………………………………… 3.4 惠式電橋線性化…………………………………………………… 3.5 靈敏度分析………………………………………………………… 3.6 溫度效應與分析……………………………………………………. 21 21 22 28 29 31 30 40 41. 四、矽壓阻式壓力感測器之設計…………………………………………… 45 -. v.
(11) 4.1 矽壓力感測器之結構設計與模擬………………………………… 4.1.1 接觸力模式………………………………………………… 4.1.2 壓力模式…………………………………………………… 4.2 壓阻設計…………………………………………………………… 4.3 元件靈敏度估算…………………………………………………… 五、感測元件製作與結果…………………………………………………… 5.1 製作感測元件流程………………………………………………… 5.2 封裝本壓力感測元件……………………………………………… 5.3 量測環境架設………………………………………………………. 45 46 59 62 64 66 66 72 71. 六、結果討論與未來工作…………………………………………………… 80 參考文獻…………………………………………………………………… 做者簡歷……………………………………………………………………. -. vi. 81 83.
(12) 表 表 2-1 表 2-2 表 3-1 表 3-2 表 3-3 表 3-4 表 3-5 表 4-1 表 4-2 表 5-1. -. 目. 錄. 蒸鍍與濺鍍兩物理氣相沈積法之比較…………………………… LPCVD、APCVD、PECVD 沈積優劣比較……………………… 壓力模式下內外徑邊緣的縱向與橫向應力……………………… 接觸力模式下內外徑邊緣的縱向與橫向應力…………………… 各種材料之壓阻因子……………………………………………… 各方向之 π l 、 π t 值………………………………………………… 在室溫下之電阻與壓阻係數比較………………………………… 施以 1kgf 的接觸力於不同直徑的中心凸塊上得邊緣縱橫向應力 施以壓力 1Pa 施於不同內徑的元件上所得之縱橫向應力……… 每一壓阻的未受力下的阻值………………………………………. vii. 11 13 29 31 34 36 37 58 61 75.
(13) 圖. 目. 錄. 圖 2-1 熱氧化成長速率(a)乾式氧化(b)濕式氧化……………………… 圖 3-1 壓組元件工作原理示意圖………………………………………… 圖 3-2 本實驗所設計之結構示意圖……………………………………… 圖 3-3 對中心凸塊結構的兩種施力模式(a)壓力模式(b)接觸力模式… 圖 3-4 壓阻受外力示意圖………………………………………………… 圖 3-5 單晶矽各晶格方向之楊氏模數…………………………………… 圖 3-6 單晶矽各晶格方向之蒲松比……………………………………… 圖 3-7 施於各方向力之示意圖…………………………………………… 圖 3-8 P 型(100)矽之縱向與橫向壓阻係數……………………………… 圖 3-9 N 型(100)矽之縱向與橫向壓阻係數……………………………… 圖 3-10 惠斯同電橋之圖意………………………………………………… 圖 3-11 摻雜濃度與壓阻溫度效應之關係………………………………… 圖 3-12 壓阻特性與 Boron 摻雜濃度關係………………………………… 圖 4-1 撓度模擬之模型,此內徑與外徑為 1:2…………………………… 圖 4-2(a) 以通用有限元素模擬軟體 Ansys 模擬內外徑比為 1:2 之結果 圖 4-2(b) 模擬內外徑比為 1:2 之撓度曲線圖…………………………… 圖 4-2(c) 模擬內外徑比為 1:2 之硬力強度曲線圖……………………… 圖 4-3 撓度模擬之模型,此內徑與外徑為 1:4…………………………… 圖 4-4(a) 內外徑比 1:4 施以 1 公斤力之 Ansys 模擬結果………………… 圖 4-4(b) Ansys 模擬內外徑比 1:4 之撓度曲線圖………………………… 圖 4-4(c) Ansys 模擬內外徑比 1:4 之硬力強度曲線圖…………………… 圖 4-5 撓度模擬之模型,此內徑與外徑為 3:4…………………………… 圖 4-7(a) 內外徑比 3:4 施以 1 公斤力之 Ansys 模擬結果………………… 圖 4-7(b) Ansys 模擬內外徑比 3:4 之撓度曲線圖………………………… 圖 4-7(c) Ansys 模擬內外徑比 3:4 硬力強度曲線圖……………………… 圖 4-8 無中心凸塊之撓度模擬模型……………………………………… 圖 4-9(a) 無中心凸塊施以 1 公斤力之 Ansys 模擬結果………………… 圖 4-9(b) 以 Ansys 模擬之撓度曲線圖…………………………………… 圖 4-9(c) 以 Ansys 模擬無中心凸塊之硬力強度曲線圖………………… 圖 4-10(a) 無中心凸塊、內外徑 1:2、1:4 三種撓度比較圖示…………… 圖 4-10(b) 三種內外徑撓度曲線圖……………………………………… 圖 4-10(c) 三種內外徑應力曲線圖……………………………………… 圖 4-11(a) 內外徑比 1:2 的縱向應力、撓度部分之模擬與推導比較…… 圖 4-11(b) 內外徑比 1:4 的縱向應力、撓度部分之模擬與推導比較…… 圖 4-11(c) 無中心凸塊的縱向應力、撓度部分之模擬與推導比較……… 圖 4-12 施不同接觸力下內外徑邊緣應力曲線…………………………… -. viii. 9 22 26 28 32 33 33 35 38 38 39 43 44 46 47 47 47 48 49 49 49 50 51 51 51 52 53 53 53 54 55 55 56 57 57 59.
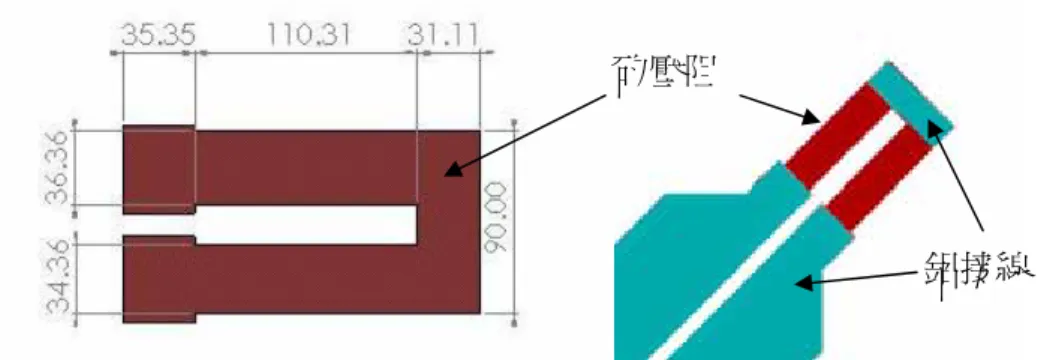
(14) 圖 4-13(a) 內外徑比 1:2 的應力、撓度部分之模擬與推導比較………… 圖 4-13(b) 內外徑比 1:4 的應力、撓度部分之模擬與推導比較………… 圖 4-14 壓阻設計之外型大小與接線……………………………………… 圖 5-1 多晶矽壓阻式壓力感測元件製作流程…………………………… 圖 5-2 壓力感測元件正反面實作結果…………………………………… 圖 5-3 覆晶封裝示意圖…………………………………………………… 圖 5-4 封裝後壓阻元件完成圖…………………………………………… 圖 5-5 接觸力量測環境架設圖…………………………………………… 圖 5-6 壓力量測環境架設圖……………………………………………… 圖 5-7 電壓驅動源下,不同溫度環境下受不同接觸力的輸出結果……… 圖 5-8 電壓驅動源下,溫度對電壓輸出源輸出訊號的影響……………… 圖 5-9 電流驅動源下,不同溫度環境下受不同接觸力的輸出結果……… 圖 5-10 電流驅動源下,溫度對電壓輸出源輸出訊號的影響……………… 圖 5-11 壓力模式下量測輸出結果…………………………………………. -. ix. 60 60 64 69 70 71 72 73 74 76 77 77 78 79.
(15) 符 號 說 明. -. v. :Poisson’s ratio. E. :Young’s Modulus. ε. :Strain. σ. :Stress. GD. :Gauge Factor of Deformation. τ. :Shear stress. γ. :Strear strain. w. :Deflection. t. :Thickness of the membrane. D. :Bending stiffness. M. :Bending Moment. Q. :Shearing force. P. :Pressure. F. :Tactile force. ρ. :Resistivity. π. :Piezoresistance coefficients. S. :Sensitivity. x.
(16) 第一章 緒論. 第一章 緒論 微機電系統(Micro Electro-Mechanical Systems)在全球已有如野火燎原 般的在各國全力發展,產業界與學術界無一不熱切地投入這股趨勢當中, 其應用領域已涵蓋電子、資訊、材料、醫學、生化、通訊及航太等等。本 研究嘗試應用微機電系統技術在矽晶圓上加工,以體微細加工技術(Bulk Micromachining)製作大小為4100×4100 µm 2 之矽型壓阻壓力感測器,相較 傳統感測運用的原理相當多,有用可動膜片組成的電容式感測、用波頓管 (Bourdon Tube)及彈簧管受力推動指針的電位計式、用利用線圈位移產生線 圈磁阻變化的磁阻磁阻式、利用壓力差導致磁通量變化的電感電橋式、和 利用材料本身受壓變化特性的應變計式等等,在此運用以純熟的半導體製 程及對壓應力極敏感的矽材料做感測器可易於量產、降低成本、縮小體積、 增加運用的範疇。此壓阻式微壓力感測器之製作完成,將可應用於解析度 需求較高時的壓力量測,亦可用於一般實驗室的研究、工業,家庭、一般 個人用品如汽車車胎計、血壓計等等。. 1.1 文獻回顧 微機電系統的觀念,是將半導體製程技術融合機械的觀念和原理而發 展的新興應用,其起源可推碩至1960年對機械微小化的研究,經過了數十 年,隨著半導體製造技術漸進的成熟,以傳統電子、電機、機械和近代物 理科學,將半導體製造技術延伸發展出目前的微機電系統,其技術包含了 微製造技術、接合技術、組裝技術、檢測技術等等。就微製造技術方面主 要分為半導體微加工、LIGA 技術、微機械加工三個大類。 在半導體微加工上更是引用了積體電路的半導體製程技術,其製程簡 單的說有三個基本製程,即薄膜沉積(Deposition)、微影(Lithography)、 -1-.
(17) 第一章 緒論. 蝕刻(Etching)等,其特點為容易大量生產、製程之元件大小極小,而就 其製程不同又可分為體型微細加工(Bulk Micromachining)和面微細加工 (Surface Micromachining),缺點是其可製作之結構受到半導體製程的製程限 制所侷限。 LIGA則是使用同步輻射產生之X-ray對矽表面做模具結構,在利用模完 成之模具做設射出成型等加工方式做加工,優點是容易製作高深寬比的結 構,但其缺點是此模具的製作過於昂貴、而且其石刻製程受限變化不大、 除此之外同步輻射全台只有一台,全世界總共也只有五十餘台。微機器加 工是使用製作更精密的機械工具,來對元件做加工,特點是可不再受限於 半導體或LIGA製程的製程約束,製作任意想要之結構,但其缺點為難以製 作極小、或是大量陣列式的元件。 其中微感測器是微機電系統中最早被商品化的產品之一,它用已成熟 的半導體製程技術與基本的機械及材料等力學,也因此其發展極為快速。 其中又以壓力感測器的製作最為成熟。這些微壓力感測器被使用在汽車的 輪胎壓力量測、工業的氣體壓力感測器、以及家中使用的智慧型空調系統…. 等等。 在本文所要研究的主題為微力感測器。以傳統機械製作的力感測器因 為體積大,無法做動態量測,並且其讀取壓力數據不易,不適合作動態自 動量測及監控,後來改用電子式壓力感測器,可把所需要量測的物理量轉 換成電訊號,方便做訊號的處理,並與整個系統做自動的控制。近年來半 導體技術的成熟與微機電系統的興起,又將感測器帶入更微小化的階段。 經過微小化的感測器不但可以保有原有的特性,其優點在於:微結構的熱 時間常數(Thermal Time Constant)很短不易受到溫度的干擾、而還有元件共. -2-.
(18) 第一章 緒論. 振頻率高,工作頻帶加寬、感測區域面積變小、空間解析度提高等優點。 就矽壓力感測器的歷史演進[6],可推至50年代,其當時半導體的壓阻 特性與工作原理的研究的始祖首推貝爾實驗室(Bell Lab),第一篇半導體壓 阻特性的論文由C.S. Smith[10]等人發表於1954年,主要介紹矽和鍺元件的 壓阻特性,並發現其壓阻特性遠超過一般金屬材料兩個階數(Order),非常 適合拿來做壓阻材料。於1958年,由Kulite、Honeywell、MicroSystems三家 公司的共同設計,第一個以矽為壓阻的壓力元件問世,其利用薄膜形變來 對壓阻材料產生材料特性改變,而其製作方式主要比較傾向微機械加工和 比較粗糙的手工接合,雖然並非使用半導體的加工技術,但其薄膜撓度施 力壓阻的元件結構與概念,奠定往後矽壓力感測元件的基本雛形,其當時 元件大小約1/2英吋。1961年,Kulite公司將之前之同設計得結構加以改良, 將原本需手工來接合矽壓阻材料,改用離子摻雜擴散(Diffused)的方式改變 矽薄板的壓阻特性來製作壓力元件,而其結構是用挖穿的金屬和矽薄板作 接合而成,其簡化了原本製程而不需再接合極小易脆的矽壓阻,也改進了 元件的效能,但此時之元件依然無法有效的縮小,約1/3英吋。1966年, Honeywell公司使用微機械製程的方式,在矽薄板背面研磨出所需的凹槽 (cavity) 結 構 , 這 個 構 想 使 往 後 用 化 學 蝕 刻 的 體 型 微 細 加 工 (Bulk-micromachining)來製作壓力感測器,在此萌芽。 1970年,Kulite公司成功的使用等向性蝕刻(Isotropic Etching)化學的方 式取代先前用機械研磨的方式製作其結構,大大提升元件生產的可行性。 並於1974年,National Semiconductor公司將矽壓力感測器量產商品化,這個 壓力感測器除了感測壓力部分外,還包含了溫度補償,算是一個完整的壓 力感測產品。1976年,Kulite公司首度利用非等項性蝕刻(Anisotropic Etching) 這種有方向性的蝕刻技巧來製作感測結構,其凹槽大小可經由半導體製程. -3-.
(19) 第一章 緒論. 的光罩來定義,而欲蝕科之厚度和形狀皆可由蝕刻時間來掌控,如此可製 作出更精準的結構。而此間使用之等向與非等向蝕刻技術,皆是往後微機 電體微加工中最重要的製程技術。1978年,Endevco公司嘗試使用中心凸塊 (Center Bossed)的結構消弭結構受到壓力而非線性的形變,而電路上使用惠 司登電橋來消除壓阻因子非線性段。隔年Honeywell使用離子佈植(Ion Implantation)來控制壓阻特性與溫度對阻值(TCR)和靈敏度(TCS)的效應; Kultie則是加入溫度補償來降低溫度效應。這些設計使得壓力元件更加穩定 準確。 到1980年代開始使用以面型微細加工技術(Surface Micromachining)製 程來設計壓力感測器,此面型加工壓力感測器與體型加工壓力感測器的不 同是面型加工在建立了犧牲層(Sacrificial Layer)與定義完結構層後,再用濕 蝕刻(Wet Etching)將犧牲層去除來建立感測器的結構,此等技術是可以將元 件做的更小,更可以做到感測器陣列(Array),相對的使用面加工的困難度 比起體加工提高許多。 1990年,Chung, G. S. [7]等人利用SOI(Silicon-On-Insulator)架構的二氧 化矽當作蝕刻停止層(Etching Stop Layer),正面將壓阻定義出來,背面以 KOH 從蝕刻成薄膜,皆停止在二氧化矽,即完成初步壓力元件。面積為360 ×1140 µm 2 的長方形,而量測壓力範圍為0.04 mV/V/mm Hg –700 mm Hg。 1991年,S. Susumu[8]等人利用面型微細加工技術製作以氮化矽為薄膜之元 件,再於薄膜上以化學沉積之多晶矽,並摻雜硼 3x1015 cm −2 。元件尺寸為 80µm × 80µm ,而靈敏度大約為10 V/V/kPa。1998年,E. K. Vesten[9]等人利. 用表面微細加工技術製作壓力感測器以多晶矽(Poly-Si)作為薄膜材質,並以 摻 雜 硼 的 多 晶 矽 為 壓 阻 , 其 大 小 為 面 積 為 103 µm ×103 µm , 靈 敏 度 為 2.0 µV / V / mmHg ,已應用於血壓的量測。. -4-.
(20) 第一章 緒論. 往後壓阻壓力感測器設計原理和觀念大致相同,其結構與壓阻的設計 改良目的在降低成本簡化製程、縮小元件體積、補償溫度效應、能得到更 大的量測範圍、靈敏度、線性度等等、甚至能和CMOS等驅動或量測電路相 結合,此些亦為本篇論文所提之壓阻壓力感測器改良的設計方向。 綜合以上矽壓阻式感測器的發展,若將已熟悉的機械的觀念配合上現 有的積體電路的製程技術,即使的壓阻式壓力感測器應用趨於可行。此微 壓力感測器將可能取代傳統感測器,所不能達到的量測解析度帶入新的領 域,不論在學術研究、工業用、家庭、個人等等,將會帶給人類另一個新 的貢獻。. 1.2 本文架構 本文共敘述了六個章節來探討運用體微加工技術所製作之矽型壓阻式 微壓力感測器。第一章緒論說明了研究的背景及目的,第二章敘述將運用 的半導體製程製作微壓力感測器所需運用到之製程技術,第三章介紹本文 研究的壓阻式微感測器的結構與動作原理,第四章說明微壓力感測器的設 計與模擬分析。第五章對此元件之製作結果、量測與問題探討。第六章則 是對此研究的結果做結論及未來工作。. -5-.
(21) 第二章 主要製程技術簡介. 第二章 主要製程技術簡介 先前提過微機電的基本製造技術主要可分為三大類─半導體微加工、 LIGA技術、微機械加工。而本論文將使用其微機電中利用半導體的製程的 方法,來製作所需的壓力感測元件,以現之半導體加工足以製作各種的元 件,微感測器、微致動器、微結構等。本章節將討論所要研究的壓力感測 器中關於製程部份,除了光罩設計與製作方面外,本論文將會使用半導體 製程中的氧化、低壓化學沉積、離子佈植、離子乾式蝕刻、電漿輔助化學 沉積及黃光流程與雙面對準技術。 在微機電製程製作微結構中,還可細分兩種不同的結構與加工模式: 體 型 微 細 加 工 (Bulk Micromachining) 、 面 型 微 細 加 工 (Surface Micro-Machining)。而壓力感測器的製作亦可用此兩種不同的加工來製作。 a. 體型微加工:是對矽晶片本身蝕刻加工,而其製程與一般積體電路 的製成有些不同,特點是使用矽晶片正反兩面皆可做加工處理。又因其通 常會深石刻及正反面之結構相互對齊,所以會使用到紅外線等雙面對準技 術。其特性如下: (1). 結構面積較大與厚度較厚. (2). 晶片兩面皆加工. (3). 結構層可為單一層矽,亦可與矽或玻璃做接合. (4). 材料特性與晶格方向有關. (5). 一般來說其製作容易度與成功率遠大於面型微加工. b. 面型微細加工:面型微細加工法並不針對矽本身做蝕刻加工,矽是 當結構的底材,藉由沈積不同材料的方法來架構所需要的結構體,特點是 常會用犧牲層來架空,最後再將犧牲層蝕刻掉。而就其他方面,面微加工 比較接近一般半導體常用的製程。其特性如下: -6-.
(22) 第二章 主要製程技術簡介. (1). 結構面積小與厚度薄. (2). 結構可由許多材質沈積而成. (3). 材料特性由所沈積的該層材料有關. (4). 可與IC製程技術整合做批量生產. (5). 有殘留應力(受沈積方式、摻雜濃度與退火等條件影響)及黏著 (Stiction)之問題. (6). 常會需去除犧牲層(Sacrificial Layer),此步驟為元件製作易失敗之處. 由於本實驗目的為製作壓阻元件,為盡量排除因結構及薄板內應力造 成之壓阻效應,並探究中心凸塊(Center Boss)結構對線性化的貢獻,在此將 使用體型為加工的方式來製作所需的壓力感測元件。. 2.1 微影技術 微影技術是半導體製程步驟中最重要的一個步驟,而半導體元件的大 小亦受到此步驟影響甚巨。由於其工作環境需在黃光的環境下作業,一般 亦稱之為黃光步驟,其的目的主要在定義薄膜的圖形,被光阻阻擋住的區 域在後續製程將不會被蝕刻,以達成圖形轉移之目的。在微影過程中光阻 為必須用到的原料,光阻主要可分正光阻和負光阻兩種,所謂正光阻是被 曝光到的區域,其光阻分子受到破壞而使它可以溶解再顯影液中;負光阻 剛好相反,曝光的區域的光阻分子鍵結在一起而使其區之光阻不會溶解再 顯影液中。光阻的種類繁多,通常後段製程及製程設計而選擇適當的光阻 即可。在此由於製程上本論文所提之壓力感測元件是使用體微加工,將會 需要長蝕刻多晶矽及矽基板,所以就阻擋層而言將選用正光阻AZP-4620此 為一約9 µm 厚膜光阻,以抵擋長時間的蝕刻及多次顯影曝光。其所需的參數 (Recipe)如下: 1. 晶片清洗:RCA clean or H2SO4 or ACE. -7-.
(23) 第二章 主要製程技術簡介. 2. 上 HMDS 附著層增加光阻附著力 3. 塗佈光阻 AZP4620: i.. Step 1:600 rpm, 5sec. ii.. Step 2:5000 rpm, 60sec. 4. 軟烤:90℃, 30min 5. 曝光:7 min (Karl-Suss MA-4) 6. 顯影:FHD-5 4 min 7. 硬烤:120℃, 30min 如此即可將所需的光罩圖形轉曝至光阻上,以進行下一道製程。. 2.2 熱氧化製程 積體電路之所以偏愛用矽作為基材其中一個主要原因是,矽可以輕易 產生一個優異的氧化物做隔絕層─二氧化矽。這種氧合物不論是在積體電路 中或是微機電元件中,都是使用極為廣泛的材料,其生成氧化矽的方式有 許多,本章說明使用高溫爐管產生氧化矽的反應和特性,此成長方式稱之 為熱氧化製程。 高溫爐管成長氧化矽的原理是利用矽基材,通入足量的氧氣或水氣至 加以高溫之爐管中使矽表面氧化。其中因通入的氣體與化學反應不同,又 有分濕式氧化沉積(Wet Oxidation)與乾式氧化沉積(Dry Oxidation)兩種,其 化學式分別如下: Si + O2 → SiO2. (1). Si + 2 H 2O → SiO2 + 2 H 2. (2). 化學式(1)是屬於乾式氧化,其成長只通入純氧氣並施加900℃以上之高 溫使其氧化;而化學式(2)是屬於濕式氧化,其成長為通入氧氣和氫氣,使 其在高溫爐管中反應成水氣,再與矽表面產生化學反應,當然濕氧反應時. -8-.
(24) 第二章 主要製程技術簡介. 未反應之氧氣亦會在矽表面與矽反應。氧化主要受兩參數所控制[11]: (1). 質量輸送係數(Mass-Transport Coefficient). (2). 化學反應常數(Reaction-rate Constant). 物質傳輸送係數指的是氧氣或是水氣從擴散至矽表面的速率,而化學 反應常數指的是化學反應的速度。在一般情況下,濕氧化的成長速率遠比 乾氧化的成長速率快上數倍,而其主要原因乃是由於濕氧所使用的氧化來 源為水氣 H 2 0 (分子量18),其分子遠小於氧分子 O2 (分子量32)所致。換句話 說即是因為水氣質量傳輸係數高,擴散入矽基材的速率遠高於氧所致,而 正因其反亦速率受擴散速率影響,當成長厚度越後厚,其擴散速率越慢, 反應生成也就越慢,其氧化溫度、厚度與時間之關係圖如圖2-1。但也因為 其成長速度快,其氧化矽之品質較乾氧化差。但不論乾氧化或濕氧化,其 皆會消耗部分的矽來行程氧化層,每成長1單位的氧化矽就損失44%的矽。. 圖2-1 熱氧化成長速率(a)乾式氧化(b)濕式氧化[11] 而就本實驗而言,將會使用濕式氧化製程1000℃之高溫來成長5000À厚 之氧化矽,由圖2-1(b)可得,欲成長至所需的厚度大約需要80分鐘的成長時. -9-.
(25) 第二章 主要製程技術簡介. 間。. 2.3 薄膜沈積技術 薄膜沈積製程在半導體積體電路製程算是已開發成熟的技術,因此若 微機電製程中欲使用此技術也是相當容易運用。薄膜沈積依據沈積過程 中,是否含有化學反應的機制,可以區分為物理氣相沈積(Physical Vapor Deposition,簡稱PVD)通常稱為物理蒸鍍及化學氣相沈積(Chemical Vapor Deposition,簡稱CVD)通常稱為化學蒸鍍,在本壓力感測器亦有所使用, 分別介紹之。. 2.3.1 物理氣相沈積 物理氣相沈積(PVD)顧名思義是以物理機制來進行薄膜沉積而不涉及 化學反應的沈積方式,所謂物理機制即是指利用欲沈積之材料的相變化來 進行沈積,其主要又包含下列兩種不同之技術: (1). 蒸鍍(Evaporation). (2). 濺鍍(Sputter). 蒸鍍是在高真空狀況下,將所要蒸鍍的材料利用電阻式(Thermal Evaporator 或稱 Thermal coater)或電子束式(E-Gun)加熱達到熔化溫度,使 原子蒸發,到達並附著在基板表面上。在蒸鍍過程中,基板溫度對蒸鍍薄 膜的性質會有很重要的影響。通常基板也須要適當加熱,使得蒸鍍原子具 有足夠的能量,可以在基板表面自由移動,如此才能形成均勻的薄膜。基 板加熱至 150℃以上時,可以使沈積膜與基板間形成良好的鍵結而不致剝 落。 濺度是利用電漿所產生的離子,如 Ar + ,藉著離子對被濺鍍物體電極的 轟擊使之濺向被鍍物。由於濺鍍本身受到濺射原子多元散射方向的影響,. - 10 -.
(26) 第二章 主要製程技術簡介. 不易覆蓋填實鎮洞(Hole)或栓塞(Plug-In);因此,現在濺鍍技術的重點,莫 不著重於改進填洞時之階梯覆蓋率(Step Coverage),簡化製造流程,降低成 本等。 表 2-1 蒸鍍與濺鍍兩物理氣相沈積法之比較 沈積速率 厚度控制 成份控制 可用材料 覆蓋能力 蒸鍍 濺鍍. 極慢 佳. 差 佳. 差 佳. 少 多. 佳 差. 本論文中壓力感測器將鍍鋁做壓阻間與接點(Pad)的連接線,由於在此 最需要的是極佳的階梯覆蓋能力,以免接點處高度差過大而斷線,而並不 需要考慮沈積速度的快慢、厚度誤差也並不要求非常精準,所以選擇使用 電阻式的蒸鍍機(Thermal Coater)來。. 2.3.2 化學氣相沈積 化學氣相沈積主要為利用化學反應的機制,先將所欲成長物之反應氣 體通入封閉的爐管中,並加熱使其反應產生目標材料,其反應需仰賴氣體 傳輸、熱能傳遞及化學反應進行,亦即反應氣體被導入反應器中,藉由擴 散方式經過邊界層(Boundary Layer)到達晶片表面,再由爐管加熱提供反應 所需的能量,反應氣體就在晶片表面產生化學變化,生成固體生而沈積在 晶片表面。 探究化學氣相沈積的沈積速率,其與熱氧化製程一樣受制於質量輸送 係數(Mass-transport Coefficient)和化學反應常數(Reaction-rate Constant),不 同的是在熱氧化時因其製程均為高溫所以只需要考慮質量傳輸係數,但在 此我需分兩種情況討論 1.較高溫之化學沈積 2.較低溫之化學沈積。在高溫 之沈積其反應速率受制於質量輸送機制,其主因乃是反應速率在高溫時極 快導致反應物來不及補充而因此受侷限;而低溫沈積正好相反,其反應速 - 11 -.
(27) 第二章 主要製程技術簡介. 率受限於化學反應機制。在積體電路製程中,經常使用的化學氣相沈積技 術有: (1).化學氣相沈積(Atmospheric Pressure CVD、縮寫APCVD) (2).低壓化學氣相沈積(Low Pressure CVD、縮寫LPCVD) (3).電漿輔助化學氣相沈積(Plasma Enhanced CVD、縮寫PECVD) 常壓化學氣相沈積(APCVD)顧名思義即化學反應在近於大氣壓的反應 爐中進行的沈積,常壓在攝氏 0 度的海平面時壓力為 760 托(Torrs),常用來 沈積二氧化矽和氮化矽薄膜。此沈積方式優點為沈積速率快、製程屬於低 溫製程(通常為 240~450℃)、良好的薄膜均勻度、反應裝置不需抽低壓亦不 需將氣體電漿化為三者裝置中最簡單的,亦易應用於工業連續式的生產, 但其缺點為步階覆蓋能不佳及容易有微粒(Particle)污染。所謂微粒污染乃是 由於在常壓下氣體分子彼此碰撞機率就很高,反應又為了使速率和均勻度 容易控制而會高速的通入氣體,導致氣體間容易發生氣相反應,產生製程 不希望沈積的微粒沈積。 低壓化學氣相沈積(LPCVD)即是在低於大氣壓的環境下進行沈積。與 APCVD系統相比較,LPCVD系統的特點是利用均勻的溫度分佈來控制成長 速率和品質,因此LPCVD有更優異的薄膜均勻度,再者由於LPCVD低壓環 境使的分子具有較高的表面遷移率,因此其擁有極佳的階梯覆蓋能力,並 且由於其壓力和氣體濃度較低,較不會產生氣體間反應而生之微粒;而 LPCVD的缺點則是沈積速率較低,常操作於高溫的環境下(>650℃)需考慮 前段製程之材料是否能夠承受,而且其常使用具有毒性、腐蝕性、可燃性 的氣體。但由於LPCVD所沈積的薄膜具有優良的性質和覆蓋性,因此在積 體電路製程中LPCVD是用以成長磊晶薄膜及其化品質要求較高的薄膜,如 氧化物、氮化物或多晶矽等。. - 12 -.
(28) 第二章 主要製程技術簡介. 電漿輔助化學氣相沈積(PECVD)系統使用電漿的輔助能量,使得沈 積反應的溫度得以降低,一般操作溫度約再 100~400℃間。除了將反應物激 發游離成電漿態外,PECVD 的沈積反應原理與一般的 CVD 之間並沒有太 大的差異,其電漿中的反應物是來至於化學活性高的離子或自由基 (Radicals),而基板表面受到離子的撞擊也會使得化學活性提高,這兩項因 素都坷促進基板表面的化學反應速率,因此 PECVD 在較低的溫度即可沈積 薄膜。PECVD 的主要優點是具有較低的沈積溫度,極高的沈積速率,並且 可藉由控制射頻(RF)功率來調控薄膜的內應力;而 PECVD 的缺點則是產量 低,容易會有微粒的污染,而且薄膜中常含有大量的氫原子。 表 2-2 LPCVD、APCVD、PECVD 沈積優劣比較 沈積方式 APCVD. LPCVD. PECVD. 優點 製程裝置較簡單 製程溫度低 沈積速率快 階梯覆蓋能力強 薄膜品質極佳 微粒污染極少 溫度低 沈積速度快 可控制材質應力. 缺點 階梯覆蓋性差 微粒污染 溫度高 沈積速率低 有微粒污染 含有大量氫離子 薄膜品質較差. 本次實驗將需要沈積多晶矽作為元件中壓阻材料,一般來說要行成多 晶矽會選擇高溫的製程,再者由於LPCVD沈積的微粒污染較少、薄膜品質 較佳,正好為壓阻所必要的條件,所以本壓力感測元件將選擇使用LPCVD 來沈積之。 再者,元件最後還會沈積二氧化矽及氮化矽作為元件保護層,由於其 製程前端有金屬層鋁,且希望其薄膜沈積後內應力能最小,因此選擇使用 低溫的PECVD來沈積所需的材料,由於此處只是用來當保護層,所以並不 在意是否其有微粒和品質。. - 13 -.
(29) 第二章 主要製程技術簡介. 2.4 蝕刻 蝕刻製程的功能,就是要將進行微影製程前所沈積的薄膜,把沒 有被光阻覆蓋及保護的部分,以化學反應或是物理作用的方式加以去 除。蝕刻技術可以分為濕蝕刻(Wet Etching)與乾蝕刻(Dry Etching)兩 類,其分別為濕蝕刻是利用液體蝕刻溶液,將晶片浸沒其中,或其噴 灑至晶片上,經由溶液與被蝕刻物間的化學反應,選擇性的移除接觸 的表面材料以達到蝕刻的目的;而乾式蝕刻則是使用氣體(通常為電 漿態)來做蝕刻反應,所以又稱之為電漿蝕刻,其可以依靠射頻(Radio Frequency)來調控其蝕刻方向性,其蝕刻沒有晶元方向、側向蝕刻等問 題,是目前半導體常用的蝕刻方式。由於此兩種蝕刻都有其適用的範 圍和可蝕刻的材料並無優劣,應視需求和蝕刻的對象而選擇適合的蝕 刻方式。 再本次壓阻壓力感測元件的製程中,將會蝕刻多晶矽、二氧化矽、 鋁、氮化矽、單晶矽等物,其下分別探討之。. 2.4.1 濕式蝕刻 濕式蝕刻是利用化學反應來進行薄膜的去除,對於非晶格結構的薄膜 蝕刻通常為一等向性蝕刻,一般而言此方式不足以定義 3 微米以下的線寬, 但對於 3 微米以上的線寬定義濕式蝕刻仍然為一可選擇採用的技術。其在 微電子製作過程中被廣泛的採用乃由於其具有低成本、高可靠性、高產能 及優越的蝕刻選擇比等優點。但相對於乾式蝕刻,除了無法定義較細的線 寬外,濕式蝕刻仍有以下的缺點:1) 需花費較高成本的反應溶液及去離子 水;2) 化學藥品處理時人員所遭遇的安全問題;3) 光阻附著性問題;4) 氣 泡形成及化學蝕刻液無法完全與晶圓表面接觸所造成的不完全及不均勻的 蝕刻;5) 廢氣及潛在的爆炸危險性。. - 14 -.
(30) 第二章 主要製程技術簡介. 濕式蝕刻之反應過程可分為三個步驟:1) 化學蝕刻液擴散至待蝕刻材 料之表面;2) 蝕刻液與待蝕刻材料發生化學反應; 3) 反應後之產物從蝕 刻材料之表面擴散至溶液中,並隨溶液排出。三個步驟中進行最慢者為速 率控制步驟,也就是說該步驟的反應速率即為整個反應之速率。大部份的 蝕刻過程包含了一個或多個化學反應步驟,各種形態的反應都有可能發 生,但常遇到的反應是將待蝕刻層表面先予以氧化,再將此氧化層溶解, 並隨溶液排出,如此反覆進行以達到蝕刻的效果。如蝕刻矽或鋁時,即是 利用此種化學反應方式。 濕式蝕刻的速率通常可藉由改變溶液濃度及溫度予以控制。溶液濃度 可改變反應物質到達及離開待蝕刻物表面的速率,一般當溶液濃度增加或 提高溶液溫度時,可加速化學反應速率進而蝕刻速率將會提高,但為了維 持製程的穩定性,通常會將溶液濃度及溫度控制在固定的條件下。 除了溶液的選用外,選擇適用的遮罩物質亦是十分重要的,它必須與 待蝕刻材料表面有很好的附著性、並能承受蝕刻溶液的侵蝕。而光阻是一 個相當常用的遮罩選擇材料,其好處是圖案轉印步驟簡單,當蝕刻液對材 料與光阻間的蝕刻選擇比高時,都會優先考慮使用光阻做遮罩層。 在本次壓力元件製作中將運用濕蝕刻技術來蝕刻金屬鋁、氮化矽及氧 化矽與多晶矽四種。 a Al 鋁是半導體製程中最主要的導線材料,它具有低電阻、易於沉積及蝕 刻等優點而廣為大家所採用,鋁或鋁合金的濕式蝕刻主要是利用加熱的磷 酸、硝酸、醋酸及水的混合溶液加以進行。典型的比例為 H3PO4:HNO3: CH3COOH:H2O=50:2:10:9 80%的磷酸、5%的硝酸、5%的醋酸及 10% 的水。而一般加熱的溫度約在 70°C-80°C 左右,溫度越高蝕刻速率越快, - 15 -.
(31) 第二章 主要製程技術簡介. 一般而言蝕刻速率約為 1000-3000 Å /min,而溶液的組成比例、不同的溫度 及蝕刻過程中攪拌與否都會影響到蝕刻的速率。 蝕刻反應的機制是藉由硝酸將鋁氧化成為氧化鋁,接著再利用磷酸將 氧化鋁予以溶解去除,如此反覆進行以達蝕刻的效果。在濕式蝕刻鋁的同 時會有氫氣泡的產生,這些氣泡會附著在鋁的表面,而局部地抑制蝕刻的 進行,造成蝕刻的不均勻性,可在蝕刻過程中予於攪動或添加催化劑降低 介面張力以避免這種問題發生。. b. Si3N4 氮化矽可利用加熱至 180°C 的磷酸溶液(85%)來進行蝕刻。其蝕刻速率 與氮化矽的成長方式有關,以電漿輔助化學氣相沉積方式形成之氮化矽, 由於組成結構(SixNyHz 相較於 Si3N4) 較以高溫低壓化學氣相沉積方式形 成之氮化矽為鬆散,因此蝕刻速率較快許多。但在高溫熱磷酸溶液中光阻 易剝落,因此在作氮化矽圖案蝕刻時,通常利用二氧化矽作為遮罩。一般 來說,氮化矽的濕式蝕刻大多應用於整面氮化矽的剝除。對於有圖案的氮 化矽蝕刻,最好還是採用乾式蝕刻為宜。 c. SiO2 在微電子元件製作應用中,主要是做絕緣層、保護元件與犧牲層之功 能,在本實驗中二氧化矽亦是如此。而二氧化矽的濕式蝕刻通常採用氫氟 酸溶液加以進行。而二氧化矽可與室溫的氫氟酸溶液進行反應,但卻不會 蝕刻矽基材及複晶矽。反應式如下: SiO2 + 6HF Æ H2 + SiF6 + 2H2O 由於氫氟酸對二氧化矽的蝕刻速率相當高,在製程上很難控制,因此 在實際應用上都是使用稀釋後的氫氟酸溶液,或是添加氟化銨作為緩衝劑 的混合液,來進行二氧化矽的蝕刻。氟化銨的加入可避免氟化物離子的消 - 16 -.
(32) 第二章 主要製程技術簡介. 耗,以保持穩定的蝕刻速率。而無添加緩衝劑氫氟酸蝕刻溶液常造成光阻 的剝離。典型的緩衝氧化矽蝕刻液(BOE : Buffer Oxide Etcher)(體積比 6:1 之 氟化銨(40%)與氫氟酸(49%))對於高溫成長氧化層的蝕刻速率約為 1000Å/min。 在半導體製程中,二氧化矽的形成方式可分為熱氧化及化學氣相沉積 等方式;而所採用的二氧化矽除了純二氧化矽外,尚有含有雜質的二氧化 矽如 BPSG 等。然而由於這些以不同方式成長或不同成份的二氧化矽,其 組成或是結構並不完全相同,因此氫氟酸溶液對於這些二氧化矽的蝕刻速 率也會不同。但一般而言,高溫熱成長的氧化層較以化學氣相沉積方式之 氧化層蝕刻速率為慢,因其組成結構較為緻密。 d. Poly-Si 在半導體製程中,單晶矽與複晶矽的蝕刻通常利用硝酸與氫氟酸的混 合液來進行。此反應是利用硝酸將矽表面氧化成二氧化矽,再利用氫氟酸 將形成的二氧化矽溶解去除,反應式如下: Si + HNO3 + 6HF Æ H2SiF6 + HNO2 + H2 + H2O. 上述的反應中可添加醋酸作為緩衝劑(Buffer Agent),以抑制硝酸的解 離。而蝕刻速率的調整可藉由改變硝酸與氫氟酸的比例,並配合醋酸添加 與水的稀釋加以控制。 2.4.2 乾式蝕刻 反應性離子蝕刻(Reactive Ion Etching 簡稱RIE)乾式蝕刻中最為廣泛使 用的方法,便使是結合(1)物理性的離子轟擊與(2)化學反應的蝕刻。此種方 式兼具非等向性與高蝕刻選擇比等雙重優點,蝕刻的進行主要靠化學反應 來達成,以獲得高選擇比。加入離子轟擊的作用有二:一是將被蝕刻材質. - 17 -.
(33) 第二章 主要製程技術簡介. 表面的原子鍵結破壞,以加速反應速率。二是將再沈積於被蝕刻表面的產 物或聚合物(Polymer)打掉,以使被蝕刻表面能再與蝕刻氣體接觸。而非等 向性蝕刻的達成,則是靠再沈積的產物或聚合物,沈積在蝕刻圖形上,在 表面的沈積物可為離子打掉,故蝕刻可繼續進行,而在側壁上的沈積物, 因未受離子轟擊而保留下來,阻隔了蝕刻表面與反應氣體的接觸,使得側 壁不受蝕刻,而獲得非等向性蝕刻。在本次實驗中,無需在矽晶片上製作 一圓型的高深度結構,用濕蝕刻其側向蝕刻過於嚴重與晶格方向等非等向 性蝕刻問題,因此選擇使用乾式蝕刻。. Deep RIE Silicon Etch 如前所述,溼式矽非等向性蝕刻加工有蝕刻面與矽晶片方向相關、過 大側蝕刻量及深寬比受限等缺點,而傳統的矽深蝕刻製程是在低基板溫度 (約 -110 ℃) 與高氟濃度下進行,雖可獲得微機電系統應用的蝕刻品質,但 在此低溫製程下會產生光阻. 裂、晶片冷凝雜質形成黑矽、晶片無法穿透. 蝕刻 500 °m 以上等缺點,再加上低溫液態氮的使用,增加了設備的複雜 性。因此雖然乾式矽非等向性蝕刻 RIE 製程可突破溼式蝕刻性與矽晶片方 向相關及過大側蝕刻量的缺點,但其蝕刻速率低 (< 1 µm/min),且亦無法得 到高深寬比 (< 10:1),因此兩者在微系統製程的應用上受限。. 感應耦合電漿(ICP)矽性蝕刻具高電漿密度低氣體壓力 (High Density Low Pressure, HDLP) 特性,可大幅提高蝕刻速率及改善深寬比,故已發展 成微機電系統製程的關鍵技術。為了改善矽深蝕刻的缺點,ICP蝕刻利用 Bosch 的交替蝕刻與高分子鈍化 (Alternating Etch and Polymerization),並改 變不同的側壁鈍化方法來進行矽深蝕刻。以 CF4/SF6 反應氣體為例說明 ICP 蝕刻機制: 一、 首先在矽壁沈積鈍化高分子:CF4 被電漿分解成活性機,並進行 - 18 -.
(34) 第二章 主要製程技術簡介. 高分子沈積反應,使壁上形成鈍化膜。 二、 矽底部的高分子與矽被蝕刻:SF6 被電漿分解成 F- 先蝕刻鈍化 膜再蝕刻 Si,此時離子撞擊的角色在移除底部的鈍化膜與維持方 向性。 三、 步驟一、二交替反覆:必須選擇適當的反應氣體,維持鈍化沈積 與蝕刻步驟的平衡。 ICP的主要特點在於不需低溫冷卻即可得到高蝕刻速率、高選擇比、高非均 向性、高蝕刻深度及高深寬比的矽蝕刻結果。. 2.5 離子佈植 離子佈植(Ion Implantation)在半導體工業中被廣泛地用來摻雜三五族 雜質原子的技術;近年來更被應用於材料表面性質的改質上,藉以改變材 料的摻雜(Doping)、導電性、歐姆接觸(Ohmic Contact)、以及硬度、強度和 抗腐蝕性等機械性質,藉以得到最佳之材料性質。 在離子佈植的過程中,雜質原子或分子係以一個帶電離子的形式被加 速至某一能量,直接撞擊靶材而進入其內。因此,佈植離子於靶材內的縱 深分佈可由精確的控制離子能量來得到,而佈植離子的劑量則可由佈植的 時間以及離子束的電流得到精確的控制。除了可精確地控制佈植離子的縱 深分佈及劑量外,利用離子佈植的方法可以得到較均勻分佈及較高濃度的 摻雜物,並且可簡單的利用光阻抵擋來選擇所欲佈植的區域。 離子佈植後需要經過一次退火的熱處理,熱處理主要有兩個目的:一 為活化摻雜原子並使其擴散,一為恢復單晶體結構。常用的熱處理系統有, 恆溫的爐管和短時間的快速熱處理爐(Rapid Thermal Processing)。雜質原 子的擴散,除了遵從定總量雜質的擴散行為外,尚需注意因佈植所產生之. - 19 -.
(35) 第二章 主要製程技術簡介. 點缺陷的影響,欲將摻雜的原子活化,則必須使其能取代矽原子的晶格位 置,故同時亦需恢復晶體之完美原子排列。所以殘存缺陷的消除,成為一 主要的課題。 殘存缺陷的消除並不容易,但是其主要成因為過多的填隙原子沉積, 而空位與填隙原子結合,則成為完美晶格。針對此特性,有幾個方法可以 將殘存缺陷減縮或消除: 1. 以高溫長時間熱處理:高溫長時間可以提供足夠的空位缺陷數量與 移動能力,使其能和填隙原子結合而將殘存缺陷消除。但是同時摻 雜離子的擴散距離將太深,而對元件工作特性具負作用。 2. 是利用非摻雜元素離子(如 Si、Ge、Ar 等…)的佈植:利用非摻 雜元素離子佈植以產生空位缺陷與填隙原子對,於原先已接受摻雜 佈植的矽靶材中,使其空位較多區和先前佈植的填隙原子較多區重 疊,而促成空位缺陷與填隙原子結合,而將缺陷在元件區消除。 3. 為利用製程的界面反應:利用製程的界面反應所產生的點缺陷,來 協助殘存缺陷的消除。例如氮化矽或金屬矽化(生成金屬矽化物) 反應,其在界面上產生多餘的空位缺陷,並向矽靶材內部擴散,這 有助於化解聚集的填隙原子。 4. 減少因離子佈所產生的填隙原子數量:低劑量佈植對靶材所造成的 損傷很輕微,填隙原子數量少,因而熱處理後並無殘存缺陷產生。 在低能量高劑量佈植下,靶材表面已受損成為非晶層,但是只要此 非晶層厚度小於 400 埃,則經 900 oC 以上退火,即可消除殘存缺陷。 這是因為在非晶與單晶界面之下的填隙原子數,遠小於能量大的佈 植,且此區也較接近靶材表面,使得空位缺陷可以很容易且源源不 斷的供應至靶材內,將填隙原子對消成為完美晶格。. - 20 -.
(36) 第三章 壓阻式壓力感測器之原理. 第三章 壓阻式壓力感測器之原理 為了完成期望的壓力感測,我需設計一有效之力轉換器,將壓力訊號轉 換成可供後續利用的電輸出訊號。在傳統的力感測運用的原理相當多,有 用可動膜片組成的電容式感測、用波頓管(Bourdon Tube)及彈簧管受力推動 指針的電位計式、用利用線圈位移產生線圈磁阻變化的磁阻磁阻式、利用 壓力差導致磁通量變化的電感電橋式、和利用材料本身受壓變化特性的應 變計式等等。 本次實驗希望結合半導體製程與微機電的觀念來完成期望之壓力感測 元件。與傳統壓力感測原理類似,矽壓力感測元件亦可使用電容、磁場效 應量測結構受壓形變的程度來計算壓力,或運用材料特性受壓改變的關係 變化來設計之,概括可用運用的原理有:壓電效應、電容效應、磁性效應、 共振效應及壓阻效應等等。在此本論文選擇用壓阻材料受力與阻值的特性 來製作所需的感測器,而其材料選擇半導體常用的多晶矽(Poly-Silicon),其 壓阻特性遠比一般材料明顯,是極佳的壓阻材料,在往後的章節將探討之。. 3.1 微力感測器工作基本原理 微力感測器的基本設計想法是產生之阻值變化與外力能產生一對一函 數曲線,如此只要得到阻值變化即可得知其相應的壓力強度,但如此並不 足夠,若阻值變化與輸入力只是單純一對一無規則的函數,將增加後端感 測電路的複雜性,因次若能設計線性函數關係的壓力感測元件,將可以大 幅降低元件使用的複雜性,這亦是所有壓力感測元件所探討的重心。而標 準的壓阻壓力感測器架構,是在薄板上放置具有壓阻特性的材料,以此來 產生線性之壓力元件。如圖 3-1 所示,當元件薄板受到外力 P 時,薄板會因 受力而產生變形,此在薄板上方之壓阻材料也會隨著薄板的彎曲而產生一 - 21 -.
(37) 第三章 壓阻式壓力感測器之原理. 股拉或擠壓的力,導致壓阻材料產生電阻值之變化。 薄板. 圖 3-1 壓阻元件工作原理示意圖. 而產生電阻變化的同時,通常為了能得到更線性的壓力-電阻曲線及更 大的壓阻變化值,常會使用惠氏電橋的差電路(Differential)來設計之,即可 去除非線性之高次項、並且將原本單一壓阻的變化放大。將如此設計通上 外加穩定電壓後,即可將電阻變化 ∆R 轉換成電壓訊號 ∆V ,由輸出電壓變化 可得知壓力的大小。. 3.2 分析施力於薄板造成的形變與應力 就上一節所敘,欲設計一壓阻式壓力感測器元件,首先要了解壓力對 薄板結構的撓度(Deflection)關係。從材料力學與靜力學推導起,得到薄板撓 度與力的關係方程式,加上邊界條件即可得到撓度解,並藉其解推算出力 矩與其最大值位置,以便應用於後續的設計中。 當薄板受到力產生之薄板形變量和所施力大小之關係[5],可從平衡方 程式(Equilibrium Equation)推導起: ∂M xy ∂M y ⎧ ⎪⎪Q yz = ∂x + ∂y ⎨ ∂M yx ⎪Q xz = ∂M x + ⎪⎩ ∂x ∂y. (3.1). ∂Q xz ∂Q yz + = − Pz ∂x ∂y. (3.2). - 22 -.
(38) 第三章 壓阻式壓力感測器之原理. 其中 Q yz Q xz 為剪力(Shearing Force)、 Pz 為施加於 z 軸之外力,將(3.1)式將代 入(3.2)得: ∂ 2 M xy ∂ 2 M y ∂2M x +2 + = − Pz ∂x∂y ∂x 2 ∂y 2. (3.3). 再將(3.3)式代入合力方程式(Resultants Equation): ⎡Mx ⎤ ⎡σ x ⎤ t/2 ⎢ ⎢ ⎥ ⎥ ⎢ M y ⎥ = ∫−t / 2z ⎢σ y ⎥ ⋅ dz ⎢ M xy ⎥ ⎢τ xy ⎥ ⎣ ⎦ ⎣ ⎦. (3.4). 其中 t 為薄板之厚度,如此可得積分式(3.5): ⎛ ∂ 2σ x ∂ 2τ xy ∂ 2σ y ⎜ ∫−t / 2 z⎜ ∂x 2 + 2 ∂x∂y + ∂y 2 ⎝ t/2. ⎞ ⎟dz = − Pz ⎟ ⎠. (3.5). 經由上之推演可得外力 Pz 與內應力間之關係式,再由廣義的虎克定律 (Generalized Hooke’s Law)可得應力與應變的關係式,將其代入式(3.5)即可 得壓力與之關係。下式(3.6)與(3.7)為虎克定律的兩種表示式(Compliance and Stiffness Form): ⎡ εx ⎤ 0 0 0 ⎤ ⎡σ x ⎤ ⎡ 1 −v − v ⎢ε ⎥ ⎢ ⎥ ⎢ −v 1 − v 0 0 0 ⎥⎥ ⎢σ y ⎥ ⎢ y⎥ ⎢ ⎢ ε z ⎥ 1 ⎢ −v −v 1 0 0 0 ⎥ ⎢σ z ⎥ ⎢ ⎥= ⎢ ⎥⋅⎢ ⎥ 0 0 ⎥ ⎢τ yz ⎥ ⎢γ yz ⎥ E ⎢ 0 0 0 1 + v ⎢γ zx ⎥ ⎢0 0 0 0 1+ v 0 ⎥ ⎢τ zx ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ 0 0 1 + v ⎥⎦ ⎢⎣τ xy ⎥⎦ ⎢⎣ 0 0 0 ⎢⎣γ xy ⎥⎦ ⎡σ x ⎤ v v 0 0 0 ⎤ ⎡ε x ⎤ ⎡1 − v ⎢σ ⎥ ⎢ ⎥ ⎢ v 1− v v 0 0 0 ⎥⎥ ⎢ ε y ⎥ ⎢ y⎥ ⎢ ⎢σ z ⎥ ⎢ v v 1− v 0 0 0 ⎥ ⎢εz ⎥ E →⎢ ⎥= ⎢ ⎥⋅⎢ ⎥ 0 0 1 − 2v 0 0 ⎥ ⎢γ yz ⎥ ⎢τ yz ⎥ (1 + v )(1 − 2v ) ⎢ 0 ⎢τ zx ⎥ ⎢ 0 0 0 0 1 − 2v 0 ⎥ ⎢γ zx ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ 0 0 0 0 1 − 2v ⎦⎥ ⎣⎢γ xy ⎦⎥ ⎣⎢ 0 ⎣⎢τ xy ⎦⎥. 再經假設使其簡化成:. - 23 -. (3.6). (3.7).
(39) 第三章 壓阻式壓力感測器之原理. ⎡ε x ⎤ 0 ⎤ ⎡σ x ⎤ ⎡ 1 −v ⎢ ⎥ 1⎢ ⎢ ⎥ 0 ⎥⎥ ⋅ ⎢σ y ⎥ ⎢ ε y ⎥ = E ⎢− v 1 ⎢γ xy ⎥ ⎢⎣ 0 0 2(1 + v)⎥⎦ ⎢⎣τ xy ⎥⎦ ⎣ ⎦. (3.8). ⎤ ⎡ 0 ⎥ ⎡ε x ⎤ ⎢1 v ⎢ ⎥ ⎢v 1 0 ⎥ ⋅ ⎢ε y ⎥ ⎢ 1− v⎥ ⎢ ⎥ ⎥ γ xy ⎢0 0 2 ⎦ ⎣ ⎦ ⎣. (3.9). ⎡σ x ⎤ E ⎢ ⎥ → ⎢σ y ⎥ = 1− v2 ⎢τ xy ⎥ ⎣ ⎦. 此二式稱之為本構方程式(Constitutive Equation),由此得到一簡單的應力與 應變的轉換式。再經由運動學方程式(Kinematics Equation),將應力─應變關 係式代換成應力─撓度的關係式: ⎡ ∂ 2 w0 ⎤ ⎢ 2 ⎥ ⎡εx ⎤ ⎡κ x ⎤ ⎢ ∂2x ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ∂ w0 ⎥ ⎢ ε y ⎥ = z ⎢ κ y ⎥ = − z ⎢ ∂y 2 ⎥ ⎢⎣γ xy ⎥⎦ ⎢⎣κ xy ⎥⎦ ⎢ ∂2w ⎥ 0⎥ ⎢2 ⎢⎣ ∂x∂y ⎥⎦. (3.10). 代入(3.5)式得 ⎡ ∂ 2 w0 ⎤ ⎢ 2 ⎥ ⎡σ x ⎤ 0 ⎤ ⎢ ∂2x ⎥ ⎡1 v Ez ⎢ ⎢ ⎥ ⎢∂ w ⎥ 0 ⎥⎥ ⋅ ⎢ 20 ⎥ v 1 → ⎢σ y ⎥ = 2 ⎢ 1− v ∂y ⎢τ xy ⎥ ⎥ ⎢ ⎥ ⎢ 0 0 1 v − 2 ⎦ ⎣ ⎣ ⎦ ⎢ ∂ w0 ⎥ ⎢⎣ ∂x∂y ⎥⎦. (3.11). 由此得到材料內應力與撓度的關係式。將之代回先前(3.5)式可得 Ez 2 ∫−t / 2 1 − v 2 t/2. ⎛ ⎛ ∂ 4 w0 ∂ 4 w0 ⎜⎜ −v 2 2 ⎜ ⎜ ∂x 4 ∂x ∂y ⎝⎝. ⎛ ∂ 4 w0 ⎞ ∂ 4 w0 ∂4w ⎟⎟ + 2(1 − v) 2 0 2 + ⎜⎜ −v 2 2 4 ∂x ∂y ∂x ∂y ⎝ ∂y ⎠. ⎛ ∂ 4 w0 ∂ 4 w0 ∂ 4 w0 Ez 2 ⎜ + + dz 2 ⎜ ∂x 4 −t / 2 1 − v 2 ∂x 2 ∂y 2 ∂y 4 ⎝. →∫. t/2. ⎞ ⎟ = Pz ⎟ ⎠. ⎞⎞ ⎟⎟ ⎟dz = Pz ⎟ ⎠⎠. (3.12) (3.13). 再此定義一個彎曲徑度(Bending Stiffness)參數: Et 3 E 2 D≡∫ z dz = −t / 2 1 − v 2 12(1 − v 2 ) t/2. (3.14). 使方程式(3.13)簡化成(3.15)式:. - 24 -.
(40) 第三章 壓阻式壓力感測器之原理. ⎛ ∂4 ∂4 ∂4 D ⋅ ⎜⎜ 4 + 2 2 2 + 4 ∂y ∂x ∂y ⎝ ∂x ⎛ ∂2 ∂2 → ⎜⎜ 2 + 2 ∂y ⎝ ∂x. ⎞ ⎟⎟ w0 = Pz ⎠. ⎞ ⎛ ∂2 ∂2 ⎟⎟ ⋅ ⎜⎜ 2 + 2 ∂y ⎠ ⎝ ∂x. (3.15). ⎞ P ⎟⎟ w0 = z D ⎠. (3.16). 將簡化方程式並將其中 wo 以 w 取代、 p z 以 p 取代之可得到下標準式: ∇ 2∇ 2 w =. P D. (3.17). 此薄板方程式(Plate Equation)為一四階偏微分方程式,假設在矩形薄板且四 邊皆為固定邊的邊界條件下,其解的通式為: w( x, y ) = k sin(. mπ nπ x) sin( y) a b. (3.18). 其中 k 、 m 、 n 、 a 、 b 皆為常係數。除此外,若欲得薄板內之力矩與撓度的 關係,將(3.11)式代入(3.5)式可得: ⎡ ∂ 2 w0 ⎤ ⎢ 2 ⎥ ⎡σ x ⎤ ⎡Mx ⎤ 0 ⎤ ⎢ ∂2x ⎥ ⎡1 v t/2 t/2 ⎢ Ez ⎢ ⎥ ⎥ ⎢ ⎥ ⎢ ∂ w0 ⎥ σ M z dz ⋅ = = y y ∫−t / 2 1 − v 2 ⎢v 1 0 ⎥ ⋅ ⎢ ∂y 2 ⎥ ⋅ dz ⎥ ∫−t / 2 ⎢ ⎥ ⎢ ⎢τ xy ⎥ ⎢ M xy ⎥ ⎢⎣0 0 1 − v ⎥⎦ ⎢ 2 ⎥ ⎣ ⎦ ⎦ ⎣ ⎢ ∂ w0 ⎥ ⎢⎣ ∂x∂y ⎥⎦. (3.19). ⎡ ∂ 2 w0 ⎤ ⎢ 2 ⎥ ⎡Mx ⎤ 0 ⎤ ⎢ ∂2x ⎥ ⎡1 v ⎥ ⎢ ⎢∂ w ⎥ 0 ⎥⎥ ⋅ ⎢ 20 ⎥ → ⎢ M y ⎥ = − D ⋅ ⎢⎢v 1 ∂y ⎢ M xy ⎥ ⎢⎣0 0 1 − v ⎥⎦ ⎢ 2 ⎥ ⎦ ⎣ ∂ ⎢ w0 ⎥ ⎢⎣ ∂x∂y ⎥⎦. (3.20). 對於求解圓形薄板之問題,將薄板方程式(3.17)轉換成極座標: ⎛ ∂2 1 ∂ 1 ∂2 ⎜ ∇ ∇ w=⎜ 2 + + r ∂r r 2 ∂θ 2 ⎝ ∂r 2. 2. ⎞⎛ ∂ 2 1 ∂ 1 ∂2 ⎟⎟⎜⎜ 2 + + r ∂r r 2 ∂θ 2 ⎠⎝ ∂r. ⎞ P ⎟⎟ w = D ⎠. (3.21). 此偏微分方程代入邊界條件即可求解所有球座標之撓度解。但可以在僅考 慮軸對稱的情況下[4],負載於 z 軸方向,(3.18)式可簡化整理成(3.22)式: ⎛ ∂2 1 ∂ ⎞ ⎛ ∂2 1 ∂ ⎞ 2 d ⎡ 1 d ⎛ dw ⎞ ⎤ P ∇ ∇ w=⎜ 2 + ⎟⎜ 2 + ⎟w = ⎜r ⎟ = r ∂r ⎠ ⎝ ∂r r ∂r ⎠ r dr ⎢⎣ r dr ⎝ dr ⎠ ⎥⎦ D ⎝ ∂r 2. 2. - 25 -. (3.22).
(41) 第三章 壓阻式壓力感測器之原理. 將均勻壓力 P 施於圓形薄板之應力,以產生的相應剪力(Shearing force) Q 取代可得(3.24): 2π r ⋅ Q = π r 2 ⋅ P →P=. 2Q r. (3.23). d ⎡ 1 d ⎛ dw ⎞ ⎤ Q ⎜r ⎟ = dr ⎢⎣ r dr ⎝ dr ⎠ ⎥⎦ D. (3.24). 其定義之剪力與壓力關係有隱含負載軸對稱之假設,即距離圓心 r 之剪力均相同,其簡化之微分方程式(3.24)適用範圍亦為施力對稱之環 境。針對本次實驗之結構如圖 3-2,為標準圓對稱之薄板問題,施力亦 為對稱函數,以此整理後之微分方程式,可以簡化求解極座標之薄板 撓度之複雜度。. a. b. 壓力. 圖 3-2 本實驗所設計之結構示意圖 相同的將(3.20)做座標轉換成極座標後可得: ⎡ ∂ 2 w v ∂w v ∂ 2 w ⎤ M r = −D ⋅ ⎢ 2 + + r ∂r r 2 ∂θ 2 ⎥⎦ ⎣ ∂r. (3.25). ⎡ ∂ 2 w 1 ∂w 1 ∂ 2 w ⎤ M t = − D ⋅ ⎢v 2 + + r ∂r r 2 ∂θ 2 ⎥⎦ ⎣ ∂r. (3.26). - 26 -.
數據


![圖 3-6 單晶矽各晶格方向之蒲松比(Poisson’s Ratio)[3] 其因受力形變導致的新電阻值為 2 2(1 )(1 )1 (1 )(1 2 ) [1 (1 2 ) ] (1 ) .newRLab vR R v R vvRRρεεεεε εε=+−=+≅ × +−≅ × + +−= + ∆ (3.44) 其中 (1 2 ) (1 2 ) DRvRRvG R ε ε ε∆ = +⋅ ⋅→∆= +⋅ =⋅](https://thumb-ap.123doks.com/thumbv2/9libinfo/8242776.171392/48.892.179.759.106.409/εε=+−=+≅×+−≅×++−=+∆⋅.webp)

+7





相關文件
Teachers may consider the school’s aims and conditions or even the language environment to select the most appropriate approach according to students’ need and ability; or develop
(a) The magnitude of the gravitational force exerted by the planet on an object of mass m at its surface is given by F = GmM / R 2 , where M is the mass of the planet and R is
Each course at the Institute is assigned a number of units corresponding to the total number of hours per week devoted to that subject, including classwork, laboratory, and the
For the data sets used in this thesis we find that F-score performs well when the number of features is large, and for small data the two methods using the gradient of the
The remaining positions contain //the rest of the original array elements //the rest of the original array elements.
A system is said to be in stable equilibrium if, when displaced from equilibrium, it experiences a net force or torque in a direction opposite to the direction of the displacement..
To convert a string containing floating-point digits to its floating-point value, use the static parseDouble method of the Double class..
The object of this research is the middle and small business loan customers of a commercial bank’s branches located in HsinChu and MiaoLio, first we adopt both the financial
