國
立
交
通
大
學
資訊科學與工程研究所
碩
士
論
文
基於影像對光學鄰近修正(OPC)後之佈局間隔
檢測之前置過濾方法
Image-based Prefiltering for Space Checking on post-OPC
Layout
研 究 生:林涵恩
指導教授:莊仁輝 教授
基於影像對光學鄰近修正(OPC)後之佈局間隔
檢測之前置過濾方法
Image-based Prefiltering for Space Checking on post-OPC Layout
研 究 生:林涵恩 Student:Han-En Lin
指導教授:莊仁輝 Advisor:Jen-Hui Chuang
國 立 交 通 大 學
資 訊 科 學 與 工 程 研 究 所
碩 士 論 文
A ThesisSubmitted to Institute of Computer Science and Engineering College of Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Computer Science
June 2010
Hsinchu, Taiwan, Republic of China
基於影像對光學鄰近修正(OPC)後之佈
局間隔檢測之前置過濾方法
學生:林 涵 恩 指導教授:莊 仁 輝 博士
國立交通大學
資訊科學與工程研究所碩士班
摘 要
近年來光學鄰近修正廣泛的應用在半導體工業,並且有許多軟體被使用在模 擬光學鄰近修正後之蝕刻結果,由於光罩蝕刻後需要針對電路圖形檢測是否符合 製程限制,例如電路元件寬度、間距,這些製程限制用於避免電路元件發生擠壓 或者橋接的情況。本論文提出了一個有效率的演算法針對光學鄰近修正後之模擬 結果做間隔檢測。首先我們設置了前置過濾器針對低解析度影像做快速的檢查。 對於距離可能發生橋接的區域,再以內插的方式提高解析度,以量測更精確的距 離。一些初步的實驗結果顯示這個系統流程是同時具備高效率與高準確率的。II
Image-based Prefiltering for Space
Checking on post-OPC Layout
Student:Han-En Lin Advisor:Dr. Jen-Hui Chuang
Institute of Computer Science and Engineering
National Chiao Tung University
Abstract
In recent years, optical proximity correction (OPC) technology has been widely used in semiconductor industry. Some software has been applied to simulate the exposure results for OPC photomask while other software has been used to check the (simulated) etched circuit for process constraints such as minimum spacing/width. These constraints are defined to avoid electrical failures such as bridge and pinch. This thesis research proposes an efficient algorithm to check the spacing of the OPC simulation results. The algorithm first applies a pre-filter to rapidly check minimum the spacing using low-resolution image. Sub-images for areas which may cause bridges are then restored with high resolution, through interpolation, to facilitate more precise examination of the spacing. Some preliminary experimental results show that the proposed system can provide required analyses satisfactorily in terms of accuracy and speed.
致 謝
本論文得以順利完成,必頇感謝我的指導教授莊仁輝老師。因為老師的細心 指導,讓我在研究上有明確的方向。也感謝三位口詴委員,顏嗣鈞教授、賴飛羆 教授以及李嘉晃教授對本論文的寶貴建議,使得論文更加完整、更加充實。 謝謝實驗室的所有夥伴,尤其是同屆的小鼻孔、BB、運動員,雖然你們常 常花很多時間討論空虛的話題,像是甜筒裝的冰淇淋為什麼會沉下去之類的。不 過也因為這樣在實驗室做研究的同時,並不會覺得枯燥或乏味。也感謝學弟妹小 馬、致傑、暐晴、椪柑、屁股,研究所生涯因為有你們變得更多采多姿。到台南 與高雄旅遊也使得碩士生涯有一段很愉快的回憶。感謝尚一學長陪我在系計中修 理機器到凌晨,也告訴我如何面對這樣突然產生的壓力。也感謝國華學長與星陸 在計畫前期以及計畫進行時的幫助。最後感謝系計中的夥伴們,讓我在碩士生涯 中,學到許多在研究主題外的技術與知識,更重要的是交到一群志同道合的朋 友。 最後,感謝一直支持我以及為我操心的家人,以及所有幫助過我的朋友們, 僅以此邊表達我最誠摯的感謝。IV
目 錄
第一章 緒論... 1 1.1 研究背景與動機... 1 1.2 相關研究... 2 1.2.1 設計規則檢查... 2 1.2.2 光學鄰近修正... 3 1.2.3 光學鄰近修正後的驗證... 4 1.3 論文流程及架構... 4 輸入資料... 5 減半取樣... 6 二值化... 6 擷取電路元件範圍影像... 6 前置過濾器... 6 高精度估測元件距離... 7 取得結果... 7 第二章 影像前處理... 8 2.1 對輸入資料減半取樣... 8 2.2 對輸入資料做二值化處理... 9 2.3 擷取待檢測電路範圍影像... 11 2.4 電路元件邊緣距離分析... 12 2.4.1 定義元件間的距離... 12 2.4.2 利用原取樣考慮最壞情況... 16 第三章 前置過濾器... 18 3.1 前置過濾器概念... 18 3.1.1 前置過濾器簡介... 18 3.1.2 考慮最壞情況下遮罩的選擇... 20 3.1.3 檢查點的配置方法... 21 綠色檢查點數量的選擇... 21 根據是否有可能達到最壞情況調整檢查點... 24 移除同一個電路元件的檢查點... 25 無法形成至少為 N N 大小矩形的區域 ... 26 3.2 前置過濾器運作流程... 29 標示紅色檢查點... 30 尋找 N N 矩形與清除紅色檢查點 ... 31 分析無法形成 N N 矩形的紅色檢查點 ... 32 分析矩形內的紅色檢查點... 32計算綠色檢查點的數量... 33 消除周圍為同一電路元件的綠色檢查點... 34 標示綠色檢查點與整合結果... 35 3.3 其他前置過濾的方法... 37 3.3.1 掃描線... 37 3.3.2 條件式遮罩... 38 第四章 實驗結果... 39 4.1 影像前處理結果... 39 減半取樣... 39 二值化... 41 擷取電路元件範圍影像... 41 4.2 前置過濾器之處理結果... 42 標示紅色檢查點及尋找 N × N 大小的矩形 ... 42 計算綠色檢查點的數量... 44 消除周圍為同一電路元件的綠色檢查點... 45 無法形成 N × N 以上大小矩形的紅色檢查點 ... 46 紅色檢查點的進一步分析... 47 第五章 高精度估測元件距離... 49 5.1 高精度估測元件距離之流程... 49 在輸入資料中找出前置過濾器所標示的對應位置... 50 利用內插法提高解析度... 51 根據閥值將影像二值化... 52 找出電路元件的輪廓... 53 重新量測電路元件間的距離... 54 5.2 實驗結果... 55 閥值為 0.17 之實驗結果... 55 閥值為 0.15 之實驗結果... 61 閥值為 0.14 之實驗結果... 69 第六章 結論與未來展望... 78 6.1 總結... 78 6.2 未來工作... 78 參考文獻... 80
VI
圖 目 錄
圖 1.1 流程圖... 5 圖 2.1 影像前處理流程。... 8 圖 2.3 (a) 輸入資料所轉成之影像強度值,(b) (a)中沿藍色虛線部份的影像強度 值。... 10 圖 2.2 輸入資料與減半取樣。... 10 圖 2.3(續) ... 11 圖 2.4 二值化與擷取電路元件範圍影像之結果。 (a)二值化之結果,(b) 擷取待檢 測電路範圍影像之結果。... 12 圖 2.5 將輸入資料表示為像素。... 13圖 2.7 Dmin之計算。(a)Dmin 3,(b)Dmin = 2,(c)Dmin = 。 ... 14
圖 2.6 將輸入資料表示為像素,與假想情況下邊緣的定義。... 14 圖 2.9 承圖 2.8 之最佳情況與最壞情況。(a)承圖 2.8(a)之最壞情況,(b)承圖 2.8(b) 之最壞情況,(c)承圖 2.8(a)之最佳情況,(d)承圖 2.8(b)之最佳情況。 ... 15 圖 2.10 參考原取樣以判斷是否有可能發生最壞情況,圓形為原取樣像素。(a)假 設的原取樣像素,(b)參考原取樣,可能發生最壞情況,(c)不會發生最壞情況。 ... 16 圖 2.10 (續) ... 17 圖 3.1 紅色區域代表可能發生橋接的區域。... 19 圖 3.2 尋找矩形之目的,以 4 4 矩形為例。(a)綠色線段代表距離至少有 4 個像 素,(b)紅色線段代表距離不足 4 個像素。 ... 20 圖 3.3 綠色檢查點數量。(a)檢查點為一點的情形,(b) x 軸與 y 軸的檢查點方向 皆為兩點的情形。... 22 圖 3.3(續) ... 23 圖 3.3(續) ... 23 圖 3.4 考慮一般情況下,綠色檢查點是否只需要 N – 2 點。 ... 23 圖 3.5 綠色檢查點調整情況。(a)考慮最壞情況的數量檢查點,(b)對 x 軸方向縮 減的情況,(c)對 y 軸方向做縮減的情況,(d)對兩軸做縮減的情況,也就是考慮 一般情況的綠色檢查點。... 24 圖 3.6 判別周圍為同一電路元件的綠色檢查點。(a)綠色檢查點周圍為不同的電 路元件,(b)綠色檢查點周圍為相同電路元件的情形,(c)(d)為不同電路元件,但 在綠色檢查點相同的一端。... 25 圖 3.6 (續) ... 26 圖 3.7 減半取樣後相同的結果對應不同的原取樣。(a)原取樣中兩端點皆為白色 點,(b)原取樣中兩端點皆為黑色點,(c)原取樣中左端點為黑色點,右端點為白 色點,(d)原取樣中左端點為白色點,右端點為黑色點。 ... 27
圖 3.7(續) ... 28 圖 3.8 前置過濾器運作流程圖。... 29 圖 3.9 標示紅色檢查點。... 30 圖 3.10 找到矩形後清除內部紅色檢查點,並四個角落的紅色檢查點標示為綠色。 ... 31 圖 3.11 四種方向的綠色檢查點。(a)矩形內左上角,(b)右上角,(c)左下角,(d) 右下角所代表的綠色檢查點。... 32 圖 3.12 參考原取樣來判斷是否以一般情況考慮綠色檢查點。... 33 圖 3.13 綠色檢查點周圍像素的可能情形。(a)周圍為不同的電路元件,(b)周圍為 相同的電路元件,(c)電路元件間的間隔為水平方向則可移除,(d)電路元件間的 間隔為垂直方向則可移除。... 34 圖 3.13 (續) ... 35 圖 3.14 前置過濾器處理之結果。... 36 圖 3.15 掃描線檢測不出問題的情況。... 37 圖 3.16 使用條件式遮罩檢測距離。(a)用於檢測水平距離的條件,(b)為(a)可檢測 出的情形之一,(c)用於檢測距離為 1.4 的條件,(d)為(c)可檢測出的情形之一。 ... 38 圖 4.1 原始影像減半取樣之反白結果。(a)原始影像,(b)減半取樣後的影像。 40 圖 4.2 二值化並反白之結果。... 41 圖 4.3 擷取電路元件範圍影像之結果。(a)原始影像,並反白處理,藍框為欲擷 取之區域,(b)擷取之後的影像。 ... 42 圖 4.4 尋找 N × N 大小矩形之結果。(a)標示紅色檢查點,(b)尋找矩形後的結果, (c)矩形內的的綠色檢查點,(d)無法找到矩形而遺留下來的紅色檢查點。 ... 43 圖 4.5 考慮是否發生最壞情況以決定綠色檢查點的數量。(a)將所有情況視為最 壞情況的綠色檢查點配置,(b)對於不會發生最壞情況的區域以一般情況配置綠 色檢查點。... 44 圖 4.6 消除周圍為同一電路元件的綠色檢查點。... 45 圖 4.7 考慮紅色區域是否會發生最壞情況。(a)找不到 N × N 大小矩形的區域,(b) 移除水平或垂直距離不會過短的檢查點。... 46 圖 4.8 同時顯示紅色與綠色檢查點之結果。(a)針對紅色檢查點做處理的結果,(b) 不對紅色檢查點另外處理的結果,(c)針對不同顏色區域可分別進行檢查。 ... 47 圖 4.8(續) ... 48 圖 4.8(續) ... 48 圖 5.1 高精度估測元件距離之流程圖。... 49 圖 5.2 保留擷取影像左上角座標。... 50 圖 5.3 根據圖 2.3(a)在原始輸入資料中找出所有需要重新量測距離的區域。 ... 51 圖 5.4 提高解析度之結果。(a)原始解析度,(b)提高解析度十倍。 ... 52 圖 5.5 提高解析度後二值化之結果。(a)原始解析度之二值化,(b)提高解析度十
VIII 倍後二值化。... 53 圖 5.6 重新量測距離之結果。(a)高解析度電路元件的輪廓,(b)重新量測距離之 結果,紅色直線標示兩端的距離小於 Dth。 ... 54 圖 5.7 閥值為 0.17 時,需要重新量測距離區域之編號。... 55 圖 5.8 (a) - (j) 分別為圖 5.7 (a) - (j)。重新量測距離之完整結果。 ... 56 圖 5.8(續) ... 57 圖 5.8(續) ... 58 圖 5.8(續) ... 59 圖 5.8(續) ... 60 圖 5.9 閥值為 0.15 時,需要重新量測距離區域之編號。... 61 圖 5.10 (a) - (n)分別為圖 5.9 (a) - (n),重新量測距離之完整結果。 ... 67 圖 5.10(續) ... 63 圖 5.10(續) ... 64 圖 5.10(續) ... 65 圖 5.10(續) ... 66 圖 5.10(續) ... 67 圖 5.10(續) ... 68 圖 5.11 閥值為 0.14 時,需要重新量測距離區域之編號。 ... 69 圖 5.12 (a) - (p) 分別為圖 5.9 (a) - (p),重新量測距離之完整結果。 ... 70 圖 5.12(續) ... 71 圖 5.12(續) ... 72 圖 5.12(續) ... 73 圖 5.12(續) ... 74 圖 5.12(續) ... 75 圖 5.12(續) ... 76 圖 5.12(續) ... 77
第一章 緒論
1.1 研究背景與動機
現今半導體產業相當地依賴光學微顯影技術(optical micro-lithography)。光 學微顯影技術是將設計好的電路圖形(pattern)精確地複製到晶圓上。為了複製 電路圖形,必頇先設計好光罩(photo mask),再應用光學成像原理,將電路圖 形投影至晶圓之上。光罩上面透明的部分可以允許光線通過,剩下不透明的部分 則阻擋光線,進而在晶圓上投影出符合需求的電路圖形。由於積體電路(integrated circuit, IC)內的電晶體密度越高其製造成本越低且速度越快,因此半導體產業一 直朝著製造更小線寬(feature size)的半導體技術發展,以便在相同大小的晶圓上 置入更多的電晶體。 由於光學微顯影技術所能製造的最小線寬與使用光源的波長成正比,因此要 製造越小的線寬就需要波長越短的光源。然而現今半導體產業所需要製造的線寬 所對應的光源波長已低於目前光學微顯影技術可使用的光源波長,因此如何應用 目前可利用的光源波長來製造出更小的線寬變成一個重要的議題。問題在於當線 寬尺寸小於光源波長時,用於曝光的光源通過光罩之後會產生繞射的現象,這些 累加起來的繞射光會使所得到的電路圖形與預期有相當的差異。為解決上述問題, 在線寬低於 90nm(奈米)以下廣泛的使用解析度增強技術(resolution enhancement techniques, RET),其作法是在傳統的設計規則檢查(design rule check, DRC)之 後再加入增加良率的圖形。在各種解析度增強技術的方法之中,光學鄰近修正 (optical proximity correction, OPC)是額外考慮未來光罩在曝光時會產生的繞射 效應,為了避免曝光後的結果與預期有相當的差異,預先修改光罩上的圖形,使 之後曝光與繞射光的效應累加後依然可以獲得符合設計階段所要求的寬度以及 形狀。2 由於光學鄰近修正必頇根據結果反覆的調整,才能達到預定的需求。因此目 前業界亦發展出許多進階的軟體可以準確模擬經過光學鄰近修正後的光罩與其 在曝光後在電路圖形上的光學效應,並將其電路圖形表示成一組離散的資料。藉 由分析這些資料,我們可以得知電路元件是否有擠壓(pinch)或橋接(bridge) 的情況。擠壓是指電路元件的寬度不足,橋接是指電路元件之間的距離過短。由 於製程上為了精準量測元件寬度與距離,因此需要較詳細的資料。這些資料的數 值表示電路元件高度的起伏,若根據這些數值可以轉換成影像的強度值,則較詳 細的資料將對應於高解析度的影像,然而分析高解析度影像通常需要更多的計算 量以及時間。因此如何快速並準確的分析這些資料也成為一個重要的環節。 為了有效率的準確分析光罩曝光後的電路元件是否符合製造需求,本篇論文 針對電路元件間是否有橋接的情況做檢測,利用低解析度的影像先做快速的過濾, 並標示出可能存在的問題,以便後續利用高解析度影像量測被標示的區域,以取 得更精準的結果。快速過濾的目標是縮減資料量以提高整體處理速度,針對過濾 後剩餘的區域提高解析度再量測可以確保準確度。希望利用這種方式,設計出一 種快速又不失準確的量測方法。
1.2 相關研究
本論文重點為檢測電路佈局是否有橋接的情況發生,由於這是半導體製程上 重要的一環,因此從規劃佈線、光學鄰近修正到最後曝光結果皆有相似的檢測與 應用。1.2.1 設計規則檢查
電路設計完成後並非實際成品,需要再提供積體電路製作的電路實體的圖形 描述,這個電路實體描述稱之為佈局(layout)。對於設計規則檢查主要目的是為 了針對積體電路佈局做幾何空間的檢查,以確保佈局符合設計規範。設計規則檢查主要分為兩種方法,第一種是以規則為基礎的設計規則檢查(rule-based DRC) [1-3],另一種是以模型為基礎的設計規則檢查(model-based DRC)[4, 5]。以規 則為基礎的設計規則檢查主要檢查電路圖形的形狀、寬度、以及電路圖形之間的 間隔。以模型為基礎的設計規則檢查,則是以電路圖形為基礎,將良好的電路圖 形當作模型,再檢驗實際的電路圖形與模型之間的差異,以判斷是否符合設計規 則。 由於製程線寬越來越小,在文獻[6]也提到當製程的線寬進步到 90nm 之後, 傳統的設計規則檢查已經無法反映電路圖形的真實情況,也就是即使佈局符合設 計規則驗證,在曝光階段也很容易發生問題。因此以模型為基礎的設計規則檢查 也常加入考量曝光過程的條件,以防止在曝光之後電路元件不符合設計規範。為 了提昇設計規則檢查的處理效率,文獻[2]應用前置過濾器。其作法是先利用一 個粗略但快速的演算法過濾不需再詳細檢測的資料。再針對剩餘的資料,利用一 個準確但處理速度較慢的演算法檢查是否有違反設計規則。
1.2.2 光學鄰近修正
光學鄰近修正(optical proximity correction, OPC)是一種用於補償在曝光階 段光線繞射所產生誤差的方法。光學鄰近修正主要有兩種主要的作法,其中一種 是以規則為基礎的光學鄰近修正(rule-based OPC)[10, 11],另一種是以模型為 基礎的光學鄰近修正(model-based OPC)[12, 13]。以下將介紹這兩種方法及其 優點與缺點。 以規則為基礎的 OPC 主要考量兩電路元件之間的距離,與電路元件的寬度。 因此以規則為基礎的 OPC 會比對電路圖形的外形以確定是否需要進行光學鄰近 修正,若找到需要修正的區域則在其光罩上增加用於修正光學誤差的圖形。例如 電路元件的末端就是一種待檢測的情形,而以規則為基礎的 OPC 會找出電路元 件的末端,參考需要增加的修正圖形,並增加在其光罩上。以規則為基礎的 OPC 處理速度相當的快速,其原因在於處理程序只需要去檢查規則列表,找出是否有
4 符合修正規則的電路圖形。 以模型為基礎的 OPC 則是依據光罩以及光學性質模擬曝光結果,將其與原 本預期之結果相比,計算出兩者的圖形的誤差量、邊緣放置誤差(edge-placement error, EPE),並在光罩上加入適當的修正量。並再次的模擬修正後的光罩曝光結 果與預期之結果,反覆的模擬修正以取得理想的修正圖形。以模型為基礎的 OPC 通常可以得到更佳的修正圖形,但由於需要反覆的模擬,其處理過程需要更多的 時間。 以規則為基礎的 OPC 比起以模型為基礎的 OPC 最大的優勢在於處理上較為 快速。然而以規則為基礎的 OPC 主要缺點在於對於沒有出現在規則列表的電路 圖形無法以類似模型為基礎的 OPC 做全面的處理與修正。
1.2.3 光學鄰近修正後的驗證
在 OPC 後,通常會針對修正後的光罩曝光結果需要再次進行全局的驗證 [6-9],以確保曝光後產生的誤差依舊可以符合需求。多數的光學鄰近修正是利用 以模型為基礎的驗證方式[7, 8],根據比對理想的電路圖形,以檢測曝光後的電 路圖形是否有不符合規則的缺陷。另外也有使用以電路圖形影像為基礎的驗證方 式[9],藉由分析影像上的強度(intensity)變化與電路元件臨界尺寸(critical dimension, CD)的關係,來檢測電路元件是否有橋接或擠壓的情況發生。文獻[9] 也提出以模型為基礎的驗證方式所使用的模型通常是在製程以及光學微顯影都 在理想的情況下才適用,然而在製程線寬到達現今的 65nm 以及 45nm 時已經不 再適合使用這樣的模型。1.3 論文流程及架構
本論文的目的在於檢測出經光罩曝光後蝕刻的電路之間是否有橋接的情況 發生之前置過濾器(pre-filter)之研究,期望透過前置過濾器來提昇整體的效率。 圖 1.1 為本論文之應用流程圖,本節將簡單介紹此流程圖中每一步處理過程。輸入資料
輸入資料的是由浮點數數值所形成的矩陣,其尺寸約為 2000 2000,每一個 數值對應到影像中一個像素的強度值。藉由取樣解析度可以知道一個像素對應到 真實情況下的長度,再依照需求,計算出在前置過濾階段所應使用的遮罩大小。 輸入資料 減半取樣 二值化 擷取影像 前置過濾器 重新量測距離 取得結果 圖 1.1 流程圖6
減半取樣
在不低於奈奎斯特率(Nyquist rate)的情況下可以變減半取樣。減半取樣是 在擷取出來的影像中只取奇數點或偶數點形成一組新的資料。相當於每四個像素 取一個像素來形成新的影像。由於奈奎斯特率代表影像不至於失真的最小取樣率, 因此在不低於奈奎斯特率的情況下降低取樣可以有效縮減資料大小,但不至於犧 牲後續處理的準確度。二值化
由於需要界定影像中各電路元件的邊緣,我們根據合作廠商所提供的的閥值 來對影像做二值化處理。高於閥值的部份便是我們想要檢測電路元件的一部分。擷取電路元件範圍影像
在將輸入資料依據閥值二值化之後,將會有一部分資料低於閥值,由於我們 想檢查電路元件間的距離是否過短,所以不在電路元件間的外圍區域則可以捨棄。 因此這個階段我們擷取有電路元件的影像,並捨棄周圍不影響檢測的區域。藉由 這個方法可以縮減資料量,以提高後續處理的效率。前置過濾器
前置過濾器是本論文主要研究的重點,前置過濾器的目的在於在後續處理之 前預先減少需要處理的資料量。透過前置過濾器可以標示出電路元件間發生橋接 或可能發生橋接的區域。這些被標示出來的區域可再進一步的檢測,進而判斷是 否真的為電路元件之間發生橋接的現象。而沒有被標示的區域則確保電路元件間 距離不可能發生橋接的現象。由於在後續步驟中針對需要進一步檢測的區域提高 解析度需要大量的運算,因此若可以在前置過濾器階段有效過濾不需要利用高解 析度影像分析的區域,將可降低後續步驟要處理的資料量以及運算量。高精度估測元件距離
這個階段根據前置過濾器留下來的區域再做進一步檢測,以確定是否有造成 電路元件間距離過短的情況。由於輸入資料表示的電路元件邊緣是離散性的,因 此我們可以針對特定的區域利用內插的方式提高解析度,以取得電路元件更精確 的邊緣,再檢測高解析度影像中電路元件之間的距離。取得結果
重新量測距離之後,可以確定前置過濾器留下的區域是否確實有問題。最後 的輸出是在佈局上標示出電路元件間距離過短的位置。8
第二章 影像前處理
本章 2.1 節到 2.3 節將介紹如何對於 OPC 模擬所得之影像做前處理,其處理 流程如圖 2.1 所示,主要步驟為減半取樣、二值化處理、與擷取待檢測電路範圍 影像。這些步驟完成後,將會得到一個較小的二值化影像,以提供下一步的前置 過濾器做分析。2.4 節將介紹元件間距離的定義方法以及最壞情況(worst case) 下的電路元件間實際距離與假設距離的可能誤差,這個誤差將會納入前置過濾器 的考量之中。2.1 對輸入資料減半取樣
許多軟體可以模擬 OPC 校正後的曝光結果,並將曝光後的電路之立體形狀 利用浮點數所形成的二維矩陣來表示。由於奈奎斯特率代表在不失真情況下的最 低取樣率,因此在不低於奈奎斯特率的情況下我們可以將原取樣率為 2.25 倍奈 奎斯特率的資料減半取樣至 1.125 倍奈奎斯特率,其計算的方式為 F F (2.1) 輸入資料 對輸入資料減半取樣 對輸入資料做二值化處理 擷取待檢測電路範圍影像 前置過濾器 影像前處理 圖 2.1 影像前處理流程。其中 F( , )代表減半取樣後的資料在座標( , )上的數值,(x, y)為目前座標位 置。限制條件為 x 2n – 1, n N 且 y 2n – 1, n N。減半取樣後的資料大小只 有原來的 25%,因此後續處理若使用減半取樣後的資料將可以得到較快的處理速 度。但此階段完成後並非就此捨棄原取樣的資料,因為後續步驟若為了取得更精 準的邊緣,仍可換算回原取樣上的對應位置,以參考周圍的像素來判斷是否會發 生最壞情況(所增加之原取樣均縮減了電路間距),我們將在 2.4.3 節介紹如何應 用原取樣的資料。
2.2 對輸入資料做二值化處理
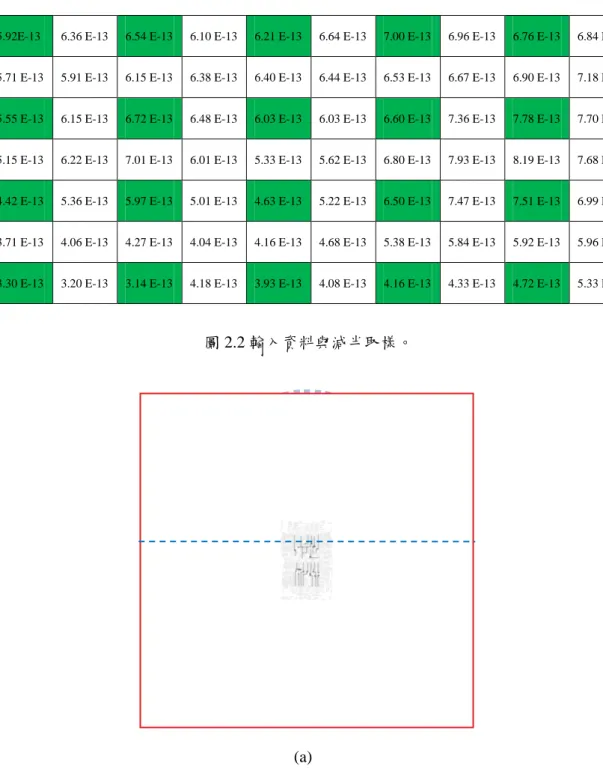
這階段的輸入資料為減半取樣後浮點數所形成之二維矩陣,如圖 2.2 所示, 綠色區域為減半取樣後應該留下的數值。其數值越大,代表該位置的電路元件之 高度越高。我們可以將每一筆浮點數的三維數值轉換為一組影像資料,其中影像 中的 x, y 座標與矩陣的行列互相對應,矩陣內的數值可視為影像中的強度值,如 此我們可以將三維的資料表示成一張影像,如圖 2.3(a),為了方便觀察我們將影 像做反白處理,紅框為實際影像的尺寸。我們將圖 2.3(a)中沿虛線部份的影像強度 值以圖 2.3(b)表示,輸入資料中的浮點數的大小對應電路元件的起伏。我們可以 發現較高的閥值會使得電路元件間的距離較長,而較低的閥值會使得電路元件間 的距離較短。為了量測電路元件間的距離,我們需要界定待檢測電路元件的邊緣, 其作法是根據合作廠商所給予的閥值做二值化處理。二值化處理後高於閥值的部 份為待檢測的電路元件,以白色像素表示,而低於閥值的部份則以黑色像素表示, 如圖 2.4 所示。10
5.92E-13 6.36 E-13 6.54 E-13 6.10 E-13 6.21 E-13 6.64 E-13 7.00 E-13 6.96 E-13 6.76 E-13 6.84 E-13
5.71 E-13 5.91 E-13 6.15 E-13 6.38 E-13 6.40 E-13 6.44 E-13 6.53 E-13 6.67 E-13 6.90 E-13 7.18 E-13
5.55 E-13 6.15 E-13 6.72 E-13 6.48 E-13 6.03 E-13 6.03 E-13 6.60 E-13 7.36 E-13 7.78 E-13 7.70 E-13
5.15 E-13 6.22 E-13 7.01 E-13 6.01 E-13 5.33 E-13 5.62 E-13 6.80 E-13 7.93 E-13 8.19 E-13 7.68 E-13
4.42 E-13 5.36 E-13 5.97 E-13 5.01 E-13 4.63 E-13 5.22 E-13 6.50 E-13 7.47 E-13 7.51 E-13 6.99 E-13
3.71 E-13 4.06 E-13 4.27 E-13 4.04 E-13 4.16 E-13 4.68 E-13 5.38 E-13 5.84 E-13 5.92 E-13 5.96 E-13
3.30 E-13 3.20 E-13 3.14 E-13 4.18 E-13 3.93 E-13 4.08 E-13 4.16 E-13 4.33 E-13 4.72 E-13 5.33 E-13
(a)
圖 2.3 (a) 輸入資料所轉成之影像強度值,(b) (a)中沿藍色虛線部份的影像強度 值。
2.3 擷取待檢測電路範圍影像
由於我們想觀察的電路元件只佔整張影像的一小部份,其他外圍的部份不會 是電路元件間隔檢測之對象,因此可以忽略以便縮小資料量。圖 2.4(a)顯示了自 二值化後的影像中移除了外圍部份後所留下待檢測的電路元件範圍,由於紅框外 圍沒有其他電路元件,因此不會有電路元件間橋接的情況發生。圖 2.4(a)的影像 大小為 1024 1024 而圖 2.4(b)大小為 170 89 (留下 1.44%)。由於減半取樣後資 料量已降低至原來的 25%,在這個例子中擷取待檢測電路範圍影像後的資料量只 有原取樣的 0.36%。 (b) 圖 2.3(續)12
2.4 電路元件邊緣距離分析
2.4.1 定義元件間的距離
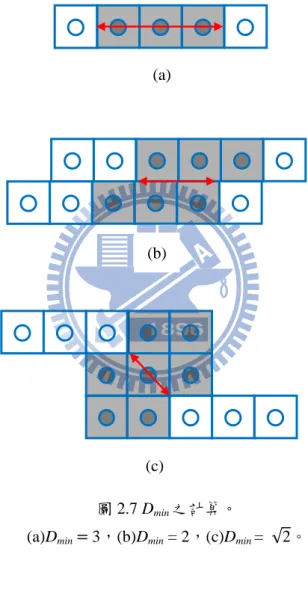
由於輸入資料是以離散的數據表示電路元件,我們將每一筆數據在影像上表 示為一個像素。由於一個像素是在影像上能夠表示的最小單位,我們觀察到的像 素中,只有該像素的中心點代表其數據。因此電路元件的實際邊緣與我們觀察到 的邊緣最多將會有正負 0.5 像素的差距存在。圖 2.5 中圓點代表輸入資料的取樣 數值,白色點為高於閥值的數值,黑色點為低於閥值的數值,方塊則代表像素。 在定義距離之前,我們必頇先定義邊緣,如圖 2.6 所示,白色像素與黑色像 素的交界定義為邊緣(紅線處)。我們希望測定的距離為邊緣與邊緣之間的直線 距離,也就是兩白色像素間的距離。由於像素中只有中心點代表其數值,因此實 際的邊緣並不一定符合上述假設,若實際邊緣符合上述之假設,所測定的距離我 們稱之為假設距離。在這一節我們定義 Dmin為某一解析度下兩電路元件的最短 (b) (a) 圖 2.4 二值化與擷取電路元件範圍影像之結果。 (a)二值化之結果,(b) 擷取待檢測電路範圍影像之結果。距離。如圖 2.7(a)代表 Dmin 3 的情形,圖 2.7(b)為 Dmin = 2 的情形,圖 2.7(c)為
Dmin = 的情形。我們最後目標是檢測出所有 Dmin小於容許距離的區域。
若實際邊緣符合假設,我們定義為一般情況(normal case),若實際邊緣不 符合假設,我們下面討論兩種的情況。第一種情況為實際邊緣由黑色像素向白色 像素外推,使得電路元件間的距離變大。若邊緣外推使得電路元件間的距離為該
解析度下可能的最遠距離,則稱之為最佳情況(best case),如圖 2.8(a)。第二種
情況是實際邊緣由白色像素向黑色像素內縮,使得電路元件間的距離變小。若邊 緣內縮使得電路元件間的距離為該解析度下可能的最短距離,則稱之為最壞情況 (worst case),如圖 2.8(b)。圖 2.9(a)(b)為繼承圖 2.8(a)(b)在下一個解析度之最壞 情況,此時移動的距離變化由原來的 0.5 像素減至原來的 0.25 像素,圖 2.9(c)(d) 為繼承圖 2.8(a)(b)之最佳情況。由於被前置過濾器判斷不會發生電路元件間橋接 的情況的區域在後續步驟將不會被檢測,因此前置過濾器在設定上需要把所有的 情況考慮為最壞情況。我們將在第三章詳細介紹前置過濾器的演算法。
14 (a)
(b)
(c)
圖 2.7 Dmin之計算。
(a)Dmin 3,(b)Dmin = 2,(c)Dmin = 。
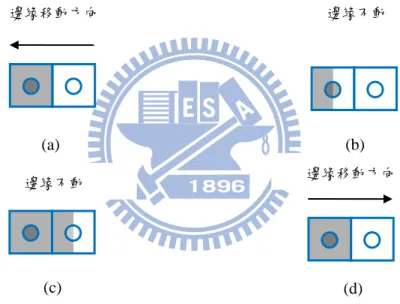
圖 2.8 最佳情況與最壞情況。 (a)最佳情況下的邊緣,(b)最壞情況下的邊緣。 (a) (b) 邊緣移動方向 邊緣移動方向 圖 2.9 承圖 2.8 之最佳情況與最壞情況。 (a)承圖 2.8(a)下一解析度之最壞情況,(b)承圖 2.8(b)下一解析度之最壞情況, (c)承圖 2.8(a)下一解析度之最佳情況,(d)承圖 2.8(b)下一解析度之最佳情況。 (a) (b) 邊緣移動方向 邊緣移動方向 (c) (d) 邊緣不動 邊緣不動
16
2.4.2 利用原取樣考慮最壞情況
在上一節提到,我們需要考慮的是電路元件間橋接的情況,因此需要檢查電 路元件間的實際距離是不是比理想距離短。為了快速取得較精確的距離,在 2.1 節中我們提到對影像減半取樣,但是保留原取樣。我們可以使用公式(2.2)將減半 取樣的座標換算成原取樣的座標。 其中 是原取樣的座標,藉由參考該像素在原取樣周圍的像素,我們可以得 知元件間的實際距離有沒有可能較估計的短。圖 2.10 中,圓形代表原取樣像素, 三角形為減半取樣後留下來的像素,我們在減半取樣後假設原取樣的像素是一半 為黑色一半為白色,如圖 2.10(a)。若在邊緣的原取樣像素皆為白色,如圖 2.10(b), 則有可能發生最壞情況,此時邊緣如黃線所示。圖 2.10(c)表示原取樣像素皆為 黑色,此時我們可以確定必定不會發生最壞情況,因此邊緣可為留在假設邊緣, 電路元件的間距不會比預期還短。 圖 2.10 參考原取樣以判斷是否有可能發生最壞情況,圓形為原取樣像素。(a)假 設的原取樣像素,(b)參考原取樣,可能發生最壞情況,(c)不會發生最壞情況。 (a)假設的原取樣像素,(b)參考原取樣,可能發生最壞情況。 (a) (2.2)圖 2.10(續) (b)
18
第三章 前置過濾器
在本論文的系統架構中,前置過濾器為主要的特點,我們期望利用前置過濾 器來濾除電路元件間隔足夠的區域,以減少後續步驟處理的資料量,進而增加系 統的整體效率。本章將介紹前置過濾器如何標示檢查點以及運作流程。其中 3.1 節將介紹前置過濾器的主要概念、如何考量在最壞情況下的檢查點數量,以及移 除不必要的檢查點。3.2 節將介紹前置過濾器的運作流程,以及如何實現 3.1 節 的方法。3.1 前置過濾器概念
本節將介紹前置過濾器的概念,其中主要概念包含兩個部份,第一個部份是 尋找至少為 N N 大小的矩形,第二個部份是標示檢查點(check point)。在第 二章我們定義電路元件間的距離為 Dmin;在這章節我們定義若電路元件間的距離 若小於距離閥值 Dth則代表電路元件間有橋接的可能。若兩電路元件間的 Dmin有 可能小於 Dth,我們標示這個連線上的所有像素,並將這些點集合稱之為檢查點。 在這個階段所標示的檢查點將在後續步驟更精確的量測距離,以便決定是否真的 為橋接的情況。3.1.1 前置過濾器簡介
由於我們的目標是希望可以快速地檢測電路元件間橋接的情況,因此前置過 濾器的主要目的是在影像中找出所有電路元件間可能小於 Dth的距離並標示出來, 以便進一步處理。如圖 3.1,白色區域代表兩不同的電路元件,紅色區域代表有 可能發生電路元件間橋接的位置;黑色區域代表不會發生橋接情況。在這個步驟 只保證前置過濾器所濾除之區域必定不會有電路元件間橋接的情況,對於留下的 區域還需要在後續步驟更精確的量測距離。在前置過濾器階段,我們使用遮罩(mask)以及檢查點來達成上述的目的。 遮罩的用途是在電路元件所表示的影像中,尋找電路元件間的間隔可形成至少為 N N(N 3)的最大矩形。若找到的矩形大小恰為 N N,則可以確定此矩形 的任一邊與其對邊的距離為 N,但矩形鄰邊之間的距離有可能小於 N。圖 3.2 中 黃框代表找到的 4 4 矩形,圖 3.2(a)的綠色線段顯示矩形對邊之間的距離有 4 個像素,圖 3.2(b)中紅色線段代表鄰邊的距離有可能小於 4 個像素。為了進一步 確認,我們將找到的矩形各鄰邊之間可能形成 Dmin小於 N 的像素標記為檢查點, 檢查點的細節將在 3.1.3 節詳細介紹。而除了檢查點之外,我們可以確定不存在 任意兩電路元件間的 Dmin可通過這個矩形且距離小於 N。在找不到大小至少為 N N 的區域,不能確保 Dmin大於等於 N 因此需要另外標示檢查點。利用這種方 式檢查整張影像,可以將所有 Dmin可能小於 N 的區域皆標示檢查點。 圖 3.1 紅色區域代表可能發生橋接的區域。
20
3.1.2 考慮最壞情況下遮罩的選擇
在 2.3.2 節中提到若電路元件的實際邊緣位置為當初預期之位置,則稱之為 一般情況(normal case);若實際邊緣之間的距離為該解析度下的最短距離,則 稱之為最壞情況(worst case)。本節將介紹在最壞情況下,前置過濾器如何決定 該尋找的矩形大小。 在 3.1.1 中 N N 矩形的任一邊與其對邊的距離 N 是在一般情況下的假設, 在相同解析度中最壞情況下矩形的兩端將各自向內推進 0.5 像素,使得矩形內的 一邊與其對邊距離剩下 N 1。因此若在 Dmin N 1 的情況下,前置過濾器必 頇設定遮罩在影像中尋找大小為 N N 的矩形,如此一來就算發生最壞情況也可 以確保找出所有可能發生電路元件間橋接的情況。舉例來說,若減半取樣後每個 像素長度代表 20nm,在我們希望 Dmin至少為 70nm 的情況下,我們可以考慮 Dmin 至少為 80nm 的情況,而使用尋找大小至少為 4 4 矩形的遮罩,再考慮最壞情 圖 3.2 尋找矩形之目的,以 4 4 矩形為例。 (a)綠色線段代表距離至少有 4 個像素,(b)紅色線段代表距離不足 4 個像素。況,則應該尋找大小至少為 5 5 的矩形。如此一來,我們在一般情況下兩端的 距離是 100nm,就算發生最壞情況兩端距離各互相靠近 0.5 像素也至少有 80nm, 不至於低於需求的 70nm。反之若使用找大小至少為 4 4 矩形的遮罩,一般情 況下的兩端距離為 80nm,在最壞情況下只有 60nm,小於需求的 70nm。
3.1.3 檢查點的配置方法
檢查點是指某兩電路元件的 Dmin通過該點且距離小於 Dth。我們標示這段距 離上的像素,代表該區域有可能發生橋接的情況。矩形內部所標記的檢查點我們 將之標示為綠色檢查點,無法找到至少為 N N 大小矩形的區域所標示的檢查點 將之標示為紅色檢查點。綠色檢查點數量的選擇
在 3.1.1 中簡單介紹了如何標記矩形內的檢查點,在這一節我們更精確的定 義其為綠色檢查點。綠色檢查點標記的數量與 N 的大小有關。綠色檢查點以 L 形延伸,分為 x 軸方向檢查點與 y 軸方向檢查點,且兩軸方向的檢查點數量相同。 我們分開定義 x 軸方向的檢查點數量與 y 軸方向的檢查點數量。如圖 3.3(a),綠 框為區域中找到的最大矩形,綠色點為四個角的綠色檢查點為一點的情況,圖 3.3(b)為 x 軸方向與 y 軸方向皆兩點綠色檢查點,綠色檢查點的數量可依此類推。 由於綠色檢查點是用來標記矩形鄰邊之間的 Dmin可能小於 Dth的情況,在一般情 況下矩形大小為 N N 時,矩形的一個角的綠色檢查點數量為 N 2;在最壞情 況下則檢查點數量為 N 1。 假設在一般情況下 Dth N 1,則遮罩必頇選擇尋找 N N 大小的矩形,依 照上述考慮一般情況下檢查點數量則為 N 2。如圖 3.4,第 N 1 點以白色問號 表示,紅色虛線指下一個可穿過第 N 1 點的最近距離。假設有任兩電路元件的 連線距離可以穿過第 N 1 點,使得小於 Dth的距離不包含在檢查點之內。由於 紅色虛線位於長度 1 以及長度 N 1 所形成之三角形的斜邊,因此紅色虛線的22 長度必超過 Dth。因此在一般情況下檢查點數量為 N 2 則可以包含所有矩形內 鄰邊距離可能小於 Dth的結果。 由於前置過濾器必頇將所有可能發生電路元件間橋接的位置標示出來,因此 實際上過濾時會將所有情況假設為最壞情況,以確保標示出所有可能發生橋接的 位置。然而這樣會增加許多不必要的檢查點,因此在接下來我們將分析並消除不 必要的檢查點。 (a) x 軸方向 y 軸方向 圖 3.3 綠色檢查點數量。 (a)檢查點為一點的情形,(b) x 軸與 y 軸的檢查點方向皆為兩點的情形。 。
N 1 … ? … N 2 圖 3.4 考慮一般情況下,綠色檢查點是否只需要 N – 2 點。 2 1 N 2 (b) 圖 3.3(續) 圖 3.3(續) y 軸方向 x 軸方向
24
根據是否有可能達到最壞情況調整檢查點
上一段介紹了一般情況與最壞情況下如何調整綠色檢查點的數量,配合在 2.3.3 中利用原取樣密度的影像來判斷是否會達到最壞情況,我們可以對 x 軸或 y 軸綠色檢查點做彈性調整。若不會發生最壞情況,則可以使用一般情況下的檢查 點。如圖 3.5(a)表示 x 軸與 y 軸方向都可能達到最壞情況,因此檢查點不做調整。 圖 3.5(b)代表 x 軸方向的檢查點不會發生最壞情況,因此縮減 x 軸方向的檢查點。 圖 3.5(c)代表 y 軸方向的檢查點不會發生最壞情況,因此縮減 y 軸方向的檢查點。 圖 3.5(d)代表 x 軸與 y 軸方向皆不會發生最壞情況,因此可使用一般情況下的檢 查點數量。藉由這種方式可以移除一部分不必要的檢查點。 (b) (d) (a) (c) 圖 3.5 綠色檢查點調整情況。 (a)考慮最壞情況的數量檢查點,(b)對 x 軸方向縮減的情況,(c)對 y 軸方向做縮減 的情況,(d)對兩軸做縮減的情況,也就是考慮一般情況的綠色檢查點。 x 軸方向 y 軸方向移除同一個電路元件的檢查點
綠色檢查點的目的是檢測不同的電路元件的 Dmin有可能通過該點而形成小 於 Dth的情況,因此若在綠色檢查點的周圍是相同的電路元件則可以排除。圖 3.6(a),綠色檢查點的周圍是不同的電路元件,我們保留這組檢查點以避免這兩 個電路元件間的距離小於 Dth。圖 3.6(b)綠色檢查點的周圍其實是相同的電路元 件,因此沒有不同的兩電路元件橋接的問題,在這種情況下這組綠色檢查點可以 移除。圖 3.6(c)雖然分為兩個不同的電路元件,但之間的間隔在水平方向,電路 元件間的連線距離並不會通過綠色檢查點,因此這組綠色檢查點也可以移除。圖 3.6(d)的間隔則是在垂直方向,其電路元件間的連線距離亦不會通過綠色檢查 點。 圖 3.6 判別周圍為同一電路元件的綠色檢查點。 (a)綠色檢查點周圍為不同的電路元件,(b)綠色檢查點周圍為相同電路元件的 情形,(c)(d)為不同電路元件,但在綠色檢查點相同的一端。 (a) (b)26
無法形成至少為 N N 大小矩形的區域
在無法找到至少為 N N 大小的矩形的區域,會留下紅色檢查點。我們可以 考慮電路元件間的寬度是否有 N – 1,再參考原取樣判斷是否會發生最壞情況。 圖 3.7 為例,我們可以發現減半取樣後的結果即使相同,對應的原取樣也有可能 不同。我們假設原取樣的一個像素是 10nm,減半取樣後一個像素代表長度為 20nm,其中分為四種情形如圖 3.7(a)(b)(c)(d)。若我們希望 Dth至少為 70nm,圖 3.7(a)電路元件間的距離在原取樣為 70nm,在最壞情況下將會只有 60nm。圖 3.7(b) 電路元件間的距離在原取樣為 90nm,在最壞情況下也有 80nm,因此我們可以濾 除這種情況的紅色檢查點。圖 3.7(c)(d) 電路元件間的距離在原取樣皆是 80nm, 在最壞情況下剛好滿足 Dmin,因此這種情況的紅色檢查點也可以濾除。 (c) (d) 圖 3.6(續)10nm 10nm 原取樣 原取樣 減半取樣 減半取樣 (a) (b) 圖 3.7 減半取樣後相同的結果對應不同的原取樣。 (a)原取樣中兩端點皆為白色點,(b)原取樣中兩端點皆為黑色點,(c)原取樣中 左端點為黑色點,右端點為白色點,(d)原取樣中左端點為白色點,右端點為黑 色點。 左端點 右端點 左端點 右端點 20nm 20nm
28 10nm 10nm 20nm 20nm 原取樣 原取樣 減半取樣 減半取樣 (c) (d) 圖 3.7(續) 左端點 左端點 右端點 右端點
3.2 前置過濾器運作流程
圖 3.8 前置過濾器運作流程圖。 標示紅色檢查點 尋找N ╳N矩形 找到矩形 清除矩形內紅色 檢查點 YES NO 設定遮罩 分析矩形內的綠色檢 查點 計算綠色檢查點數量 消除周圍為同一電路 元件的綠色檢查點 標示綠色檢查點 分析無法形成N ╳N 矩形的紅色檢查點 整合結果30
標示紅色檢查點
在第二章我們介紹過在前置過濾器階段之前處理。在前置過濾器階段的輸入 影像已經經過對輸入資料減半取樣、二值化、擷取電路元件範圍影像的處理。此 時影像中只有代表電路元件的白色像素,及不存在電路元件的黑色像素。在這個 階段,我們將影像中的黑色像素標示為紅色檢查點,以便後續處理。如圖 3.9 所 示,對全影像為黑色像素的區域標示紅色檢查點。 圖 3.9 標示紅色檢查點。尋找 N N 矩形與清除紅色檢查點
根據需求設定遮罩,使用遮罩尋找至少為 N N 的黑色像素形成之矩形,直 到遮罩掃描完整張影像。找到至少為 N N 形成之最大矩形後,將矩形內四個角 落的紅色檢查點標示為綠色,並清除其他被包含在矩形內的紅色檢查點。如圖 3.10,以尋找至少為 3 3 矩形為例,我們保留尋找到最大矩形的四個角落之紅 色檢查點並將其重新標示為綠色。黃框內的區域為無法找到至少為 3 3 大小矩 形的區域。 圖 3.10 找到矩形後清除內部紅色檢查點,並四個角落的紅色檢查點標示為 綠色。32
分析無法形成 N N 矩形的紅色檢查點
在 3.1 節中介紹過無法找到矩形區域可參考原取樣來判斷是否有可能小於 Dth。在此步驟中使用相同方法,以水平或垂直方向分析剩餘的紅色檢查點,若 發現距離不會小於 Dth,則將對應的紅色檢查點移除。在尋找矩形的步驟可以將 矩形內的紅色檢查點與無法形成矩形的紅色檢查點分開,因此此步驟可以與綠色 檢查點平行處理。分析矩形內的紅色檢查點
在遮罩掃描完整張影像之後,檢查點分為紅色與綠色兩種。紅色檢查點是因 為無法形成至少為 N N 大小矩形的區域所遺留下來的檢查點;綠色檢查點為矩 形內部四個角所標示的檢查點。綠色檢查點根據左上、右上、左下、右下四個位 置以 L 形延伸成四組檢查點,如圖 3.11,分別是四個角的檢查點延伸的情形。這 個階段的檢查點皆為一點,我們必頇分析出各個綠色檢查點應屬於這四種檢查點 的哪一種,以提供下一步驟處理的必要資訊。 圖 3.11 四種方向的綠色檢查點。 (a)矩形內左上角,(b)右上角,(c)左下角,(d)右下角所代表的綠色檢查點。 (a) (b) (c) (d)計算綠色檢查點的數量
在 3.1.3 節中我們介紹考慮最壞情況下若尋找矩形大小為 N N,則綠色檢 查點各方向數量應該為 N 1 點。我們再檢測各方向綠色檢查點之端點在原取樣 的位置,如圖 3.12(a)所示,三角形代表減半取樣後留下的奇數點,圓形代表原 取樣上的其他點,若黃色圓圈所代表的像素皆是黑色像素,則代表 A 端點不會 發生最壞情況,因此可依照 3.1.3 節對 x 方向縮減綠色檢查點,如圖 3.12(b)所示。 若黃色圓圈所在的位置不全為黑色像素,則我們保留原來的綠色檢查點數量。A A' (a) (b) 圖 3.12 參考原取樣點來判斷是否以一般情況考慮綠色檢查點。 像素來判斷是否屬於一般情形,(b)以一般情形考慮 X 軸方向的綠色檢查點,(c) 必須以可能發生最壞況考慮綠色檢查點。 對應到原取樣 像素來判斷是否 屬於一般情形, (b)以一般情形考 慮 X 軸方向的綠 色檢查點,(c)必 須以可能發生最 壞況考慮綠色檢 查點。
34
消除周圍為同一電路元件的綠色檢查點
我們利用編號的方式來判斷檢查點的周圍是否為相同的電路元件,若是相同 的電路元件則移除該檢查點。其作法是根據綠色檢查點的周圍以逆時鐘方向給予 一個編號,相連的電路元件則使用相同的編號,若不相連則給予不同的編號。若 出現兩個以上不同的編號則代表不同的電路元件。以圖 3.13 為例,分別對綠色 檢查點外圍的電路元件給予編號。圖 3.13(a)中有兩個不同的編號,則代表是不 同的電路元件。圖 3.13(b)中只有一種號碼,代表檢查點的兩端是相同的電路元 件。圖 3.13(c)(d)雖然有兩種號碼,但是圖 3.13(c)兩電路元件間的間隔是水平方 向,圖 3.13(d)兩電路元件間的間隔是垂直方向,這兩種方向若有電路元件間橋 接的情況,則會出現在找不到至少為 4 4 大小的矩形而被標示成紅色,因此不 需要在綠色檢查點多做檢測。1
1
1
1
1
1
1
1
2
2
2
(a) (b) 圖 3.13 綠色檢查點周圍像素的可能情形。 (a)周圍為不同的電路元件,(b)周圍為相同的電路元件,(c)電路元件間的間隔為 水平方向則可移除,(d)電路元件間的間隔為垂直方向則可移除。標示綠色檢查點與整合結果
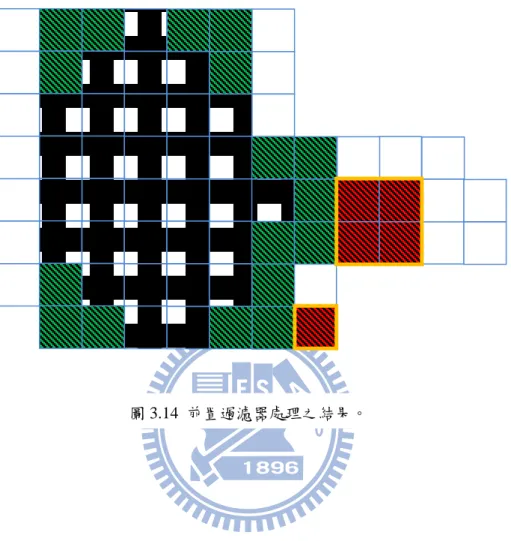
最後根據綠色檢查點的種類(左上、左下、右上、右下)、數量(取決於 N 與會不會發生最壞情況)以及是否移除(取決於是否為相同之電路元件),依照 矩形內四個角落的綠色檢查點進行標示,最後再整合紅色檢查點分析後的結果。 圖 3.14 為圖 3.9 經過前置過濾後之可能情形。最後根據這些步驟我們可以計算時 間複雜度,使用遮罩找尋最大矩形只需掃描一次影像即可得知,因此為 O(N2)。 標示綠色檢查點為 O(K),K 為矩形內保留檢查點的數量,因為 K<N2,因此可視 為時間複雜度為 O(N2)。標示紅色檢查點的時間與綠色檢查點類似,可視為 O(N2), 因此總時間複雜度為 O(N2 )。1
1
2
2
2
2
2
1
1
1
2
2
1
1
圖 3.13 (續) (c) (d)36
3.3 其他前置過濾的方法
除了目前使用的前置過濾方法外,本論文還嘗詴過幾種其他方法。本節將會 介紹其他兩種檢測電路元件之間是否有橋接情況的方法,並簡介其優點與缺點。3.3.1 掃描線
根據需求所給予的閥值將原始資料轉為二值化影像後,對水平方向一次一列 逐一掃描電路元件間的間隔,並標示出電路元件間的距離小於 Dth的情形。取得 水平掃描結果後,再針對垂直方向逐一掃描以取得垂直方向的結果。最後再聯集 兩次掃描結果以取得最後的結果。 此方法優點在於演算法簡單且兩次掃描可平行處理,因此處理時間相當的快 速。缺點在於只考慮一維的距離,因此無法檢測出非水平且非垂直但距離過短的 情況。以圖 3.15 為例,其水平或垂直之間的間隔皆大於等於 3,但紅色箭頭標示 處的距離只有 1.4。 圖 3.15 掃描線檢測不出問題的情況。38
3.3.2 條件式遮罩
另一種方法是利用一個 N N 的遮罩做檢測,遮罩內使用條件的方式定義所 有可能發生電路元件間過短的情況,然後逐一檢查整張影像。如圖 3.16,使用一 個 3 3 大小的遮罩檢測 Dmin小於 2 的情形。圖 3.16(a)表示若位置 1 為白色像素, 位置 2 為黑色像素,且位置 3 是白色像素則代表發生 Dmin 1 的情況,圖 3.16(b) 為此遮罩可以檢測出來的情形。圖 3.16(c)可用於檢測距離為 1.4 的情況,圖 3.16(d) 為實際情形。若要考慮 1、3 位置上的電路元件是否為同一電路元件則需要增大 遮罩,並定義更嚴格的條件來判斷。 此方法雖然沒有掃描線的缺點,卻相當的不具彈性。只要 Dmin改變就必頇 定義一組複雜且嚴謹的條件才能進行檢測。其條件數量必頇為 2K,K = N N, 才能保證考慮到所有的情況。1
2
3
3
2
1
(a) (b) (c) (d) 圖 3.16 使用條件式遮罩檢測距離。 (a)用於檢測水平距離的條件,(b)為(a)可檢測出的情形之一,(c)用 於檢測距離為 1.4 的條件,(d)為(c)可檢測出的情形之一。第四章 實驗結果
在前面的章節,我們詳細介紹了前置處理的概念與演算法,在這個章節我們 將會呈現各個步驟的階段性結果。4.1 節將會介紹前置過濾器之前處理的結果與 分析;4.2 節將會介紹前置過濾器各階段的處理結果。4.1 影像前處理結果
影像前處理分為三個部份,也就是對輸入資料減半取樣、二值化和擷取電路 元件範圍影像,經過這三項處理後才將資料交給前置過濾器處理。這一節我們將 會介紹上述步驟的處理結果。減半取樣
原始影像尺寸為 2048 2048,大小約 4.8MB,如圖 4.1(a)。圖 4.1(b)是減半 取樣後的影像,其尺寸為 1024 1024,大小約 1.2MB。為了顯示上較為清楚, 這階段的圖片皆反白處理,以便觀察。為了觀察電路元件在影像上的實際位置, 我們以紅框標示影像邊界。原始影像中一個像素的大小代表 10nm × 10nm,減 半取樣後一個像素的大小變為 20nm × 20nm。40 (a)
(b)
圖 4.1 原始影像減半取樣之反白結果。 (a)原始影像,(b)減半取樣後的影像。
二值化
根據需求合作廠商所給予的閥值(0.17),對減半取樣後的資料做二值化處 理,如圖 4.2。其中圖片經過反白處理以便觀察,黑色的部份為待檢測的電路元 件,紅色框線為影像邊界。擷取電路元件範圍影像
二值化處理後,我們可得知電路元件的分佈範圍,這個階段根據此分佈範圍 來擷取電路元件範圍影像。如圖 4.3(a),我們擷取藍色框線內的區域以縮小影像 尺寸。圖 4.3(b)為擷取後的影像,並不再做反白處理,因此白色區域代表待檢測 的電路元件。 圖 4.2 二值化並反白之結果。42
4.2 前置過濾器之處理結果
前置過濾器之階段性結果將配合圖 3.7 的流程圖呈現,其步驟為標示紅色檢 查點及尋找 N N 大小的矩形、計算綠色檢查點的數量、消除周圍為同一電路元 件的綠色檢查點、分析無法形成 N N 大小矩形的紅色檢查點。在上述步驟完成 後,會有一張標示紅色檢查點的影像與一張標示綠色檢查點的影像,我們整合紅 色與綠色檢查點以產生最後的結果。標示紅色檢查點及尋找 N
×
N 大小的矩形
影像中非電路元件的區域填滿紅色檢查點,亦即將影像中黑色像素置換成紅 色像素,如圖 4.4(a),以便接下來尋找 N N 大小的矩形。我們將 Dth定為 75nm, 因此我們需要對影像尋找 5 5 大小的矩形,若能找到這種矩形,則移除矩形中 圖 4.3 擷取電路元件範圍影像之結果。 (a)原始影像,並反白處理,藍框為欲擷取之區域,(b)擷取之後的影像。 (a) (b)的紅色檢查點,但保留四個角落的紅色檢查點,如圖 4.4(b)。接下來可以分為兩 個部份,一部分為矩形內四個角落的紅色檢查點,如圖 4.4(c);另一部份為無法 找到 5 5 大小的矩形所遺留下來的檢查點,如圖 4.4(d)。 (a) (b) 圖 4.4 尋找 N × N 大小矩形之結果。 (a)標示紅色檢查點,(b)尋找矩形後的結果,(c)矩形內的的綠色檢查點,(d)無 法找到矩形而遺留下來的紅色檢查點。 。 (c) (d)
44
計算綠色檢查點的數量
我們在第三章提到,檢查點的數量除了與 N 的大小有關之外,尚頇考慮是 否有可能發生最壞情況。在這個階段,針對每一組的檢查點計算 x 軸方向檢查點 的數量,以及 y 軸方向檢查點的數量。圖 4.5(a)為每一組都考慮最壞情況下的檢 查點,此時綠色檢查點的數量約佔全影像的 7%;圖 4.5(b)加入考慮不會發生最 壞情況下的檢查點,此時檢查點的數量約佔全影像的 5.2%。由於這個步驟受到 實際資料影響,若所有綠色檢查點皆發生最壞情況則沒有效果,因此可以納入是 否執行的選項之一。 (a) (b) 圖 4.5 考慮是否發生最壞情況以決定綠色檢查點的數量。 (a)將所有情況視為最壞情況的綠色檢查點配置,(b)對於不會發生最壞情況的區 域以一般情況配置綠色檢查點。消除周圍為同一電路元件的綠色檢查點
利用標籤的方式,移除周圍為同一電路元件的綠色檢查點,如圖 4.6 為其結 果。此時綠色檢查點只佔原影像的 0.2%。紅色橢圓標示處雖然是同一電路元件, 但沒有被移除,這是由於我們只觀察綠色檢查點周圍,若要改善這個部份可以觀 察較大的範圍,或者先對電路元件做連通元件(connected component)以識別是 否為相同的電路元件。 圖 4.6 消除周圍為同一電路元件的綠色檢查點。46
無法形成 N
×
N 以上大小矩形的紅色檢查點
對於無法形成 N × N 大小矩形的區域,我們可以針對水平方向或垂直方向 判斷是否有可能發生最壞情況,藉由這種方法可以消除一部分不必要的紅色檢查 點。圖 4.7(a)中紅色檢查點為無法形成 N × N 大小矩形的區域,圖 4.7(b)為處理 結果。這個步驟的效果受到實際資料與 Dth影響,若所有邊緣皆發生最壞情況則 沒有效果,因此可納入是否執行的選項之一。圖 4.7(a)的紅色檢查點約佔全影像 的 5.2%,而圖 4.7(b)的紅色檢查點佔全影像的 5%。 (a) (b) 圖 4.7 考慮紅色區域是否會發生最壞情況。 (a)找不到 N × N 大小矩形的區域,(b)移除水平或垂直距離不會過短的檢查點。紅色檢查點的進一步分析
最後我們同時顯示綠色檢查點與紅色檢查點的結果,如圖 4.8(a)為針對紅色 檢查點處理的結果,圖 4.8(b)為不針對紅色檢查點處理的結果。我們將較狹長形 狀的紅色區域標示為藍色區域,如圖 4.8(c)。至此為前置過濾器處理後得到的結 果,根據顏色可分為三個區域,紅色區域將在進一步測量二維的距離,藍色區域 主要檢查一維距離(水平或垂直),綠色區域則針對綠色檢查點對應的方向測定 距離。 (a) (b) 圖 4.8 同時顯示紅色與綠色檢查點之結果。 (a)針對紅色檢查點做處理的結果,(b)不對紅色檢查點另外處理的結果,(c)針對 不同顏色區域可分別進行檢查。 。48
(c)
圖 4.8(續) 圖 4.8(續)
第五章 高精度估測元件距離
5.1 高精度估測元件距離之流程
在前置過濾器處理完成後,我們會得到電路元件間有可能發生橋接的區域。 根據這些區域的位置,可以換算回輸入資料中相對應的位置,再藉由內插的方式 增加解析度,以便我們更準確的量測元件間的距離。其流程如圖 5.1,本章將會 詳細介紹各個步驟。 在輸入資料中找出前置 過濾器所標示的對應位置 利用內插法提高解析度 根據閥值將影像二值化 找出電路元件的輪廓 重新量測電路元件間的距離 圖 5.1 高精度估測元件距離之流程圖。50
在輸入資料中找出前置過濾器所標示的對應位置
在前置過濾器處理完成後,我們希望對有問題的區域利用內插法提高解析度, 以便更精準的量測距離,再根據結果判定電路元件間是否發生橋接的情況。因此 我們需要得知有問題的區域在輸入資料中的對應位置,以便取得原始的資料來執 行影像內插。我們在影像前處理階段保留擷取影像的座標位置,如圖 5.2,保留 紅色點(擷取影像的左上角)的座標位置,如此一來就可以得知黃框內的位置與 在擷取影像前的對應座標。取得擷取影像前的座標之後,再換算回原取樣的座標 位置。如圖 5.3 所示,紅框代表前置過濾器標示的紅色檢查點及其周圍區域,綠 框代表前置過濾器標示的綠色檢查點及其周圍區域,為了方便觀察,圖 5.3 移除 了外圍沒有電路元件的區域。 y 座標 x 座標 圖 5.2 保留擷取影像左上角座標。利用內插法提高解析度
在上一節標示出需要重新量測的區域後,我們利用內插的方式來提高解析度, 以提供重新量測距離時更精確的資料。常見的內插方法有雙線性內插(bilinear interpolation)、雙立方內插(bicubic interpolation)及正弦內插(sinc interpolation)。 雙線性內插只需要周圍的 4 個像素計算出內插值,因此速度最快但效果較差;正 弦內插是在有限頻寬(band-limited)假設下,唯一能夠正確還原高解析度資料 的內插方法,其使用的公式是一個無界函數(unbounded function),需使用較多 像素來取得較佳的內插值,運算速度相對較慢;雙立方內插則常用於影像與視訊 放大,其需要 16 個像素來計算出內插值,其效果與速度介於前兩者之間。圖 5.4(a) 為原解析度影像,圖 5.4(b)為利用正弦內插以提高解析度十倍之影像。 圖 5.3 根據圖 2.3(a)在原始輸入資料中找出所有需要重新量測距離的區域。
52
根據閥值將影像二值化
這個步驟同第二章的二值化,根據合作廠商所提供的閥值對影像做二值化處 理,以便界定待檢測的電路元件。如圖 5.5(a)為原解析度影像二值化之結果,圖 5.5(b)為提高解析度十倍後再二值化之結果。 圖 5.4 提高解析度之結果。 (a)原始解析度,(b)提高解析度十倍。 (a) (b)找出電路元件的輪廓
取得二值化後的影像後,我們希望對影像中的各個電路元件間的間隔做檢測, 因此我們使用連通元件法來判斷影像中電路元件的數量以及各個白色像素所屬 的電路元件。接著我們找出電路元件的輪廓,圖 5.6(a)為尋找輪廓之結果。 (a) (b) 圖 5.5 提高解析度後二值化之結果。 (a)原始解析度之二值化,(b)提高解析度十倍後二值化。54
重新量測電路元件間的距離
最後,根據輪廓上的像素位置與連通元件的資訊來計算兩不同的電路元件間 的歐式距離(Euclidean distance),並把距離小於 Dth(75nm)的兩端用紅色直線 相連以標示發生橋接。如圖 5.6(b)中的連線代表對應的兩像素於兩不同的電路元 件間的歐式距離小於 75nm。 圖 5.6 重新量測距離之結果。 (a)高解析度電路元件的輪廓,(b)重新量測距離之結果,紅色直線標示兩端的距離小 於 Dth。 (a) (b)5.2 實驗結果
閥值為 0.17 之實驗結果
在這組資料中,需要重新量測距離的區域有十個,圖 5.7 為各個需要重新測 量距離的區域之編號,這些編號對應到圖 5.8(a - j)。對於距離小於 Dth的間隔我 們以紅線將兩端相連,圖 5.8(c)中電路元件間的距離皆大於 Dth,因此沒有任何紅 線;圖 5.8(d)中只有一個電路元件,因此不需要再重新量測距離。 (a) (b) (c) (d) (f) (e) (g) (h) (i) (j) 圖 5.7 閥值為 0.17 時,需要重新量測距離區域之編號。56
圖 5.8 (a) - (j) 分別為圖 5.7 (a) - (j)。重新量測距離之完整結果。 (a)
(c)
(d)
58 (e)
(f)
(g)
(h)
60 (j) (i)
閥值為 0.15 之實驗結果
圖 5.9 為閥值取 0.15 之結果,由於較低的閥值會使得影像中電路元件間的距 離較短,因此被標示出低於 Dth的區域較閥值取 0.17 的結果多。 圖 5.9 閥值為 0.15 時,需要重新量測距離區域之編號。 (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (k) (l) (m) (n)62
圖 5.10 (a) - ( n) 分別為圖 5.9 (a) - (n)重新量測距離之完整結果。 (a)
圖 5.10(續) (c)
64 圖 5.10(續)
(e)
圖 5.10(續) (g)
66 圖 5.10(續)
(i)
圖 5.10(續) (k)
68 圖 5.10(續) (m)
閥值為 0.14 之實驗結果
圖 5.11 為閥值取 0.14 之結果,其被標示出低於 Dth的區域多於閥值取 0.17 以及 0.15 的結果。 (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (k) (l) (m) (n) (o) (p) 圖 5.11 閥值為 0.14 時,需要重新量測距離區域之編號。70
圖 5.12 (a) - (p) 分別為圖 5.9 (a) - (p)重新量測距離之完整結果。 (a)
(c)
圖 5.12(續) (d)
72
圖 5.12(續) (e)
圖 5.12(續) (g)
74
圖 5.12(續) (i)
(k)
圖 5.12(續) (l)
76 圖 5.12(續)
(m)
圖 5.12(續) (o)