應用於感測網路下具調適能力的衰減因子模型定位演算法
50
0
0
全文
(2) 應用於感測網路下具調適能力的衰減因子模型定位演算法 Adaptive Attenuation Factor Model for Localization in Sensor Networks. 研 究 生:陳建宏. Student:Chien-Hung Chen. 指導教授:曾建超 博士. Advisor:Chien-Chao Tseng. 國 立 交 通 大 學 電 機 資 訊 學 院 資 訊 工 程 學 系 碩 士 論 文. A Thesis Submitted to the Department of Computer Science and Information Engineering College of Electrical Engineering and Computer Science National Chiao Tung University in Partial Fulfillment of the Requirements for the Degree of Master of Science in Computer Science and Information Engineering Hsinchu, Taiwan, Republic of China July 2004. 中華民國九十三年七月.
(3) 應用於感測網路下具調適能力的衰減因子模型定位演算法 研究生:陳建宏. 指導教授:曾建超 博士 國立交通大學 資訊工程研究所碩士班 摘要. 近年來由於微電機系統以及無線通訊技術的發展,和各方面感應材質的進 步下,無線感測網路 (Wireless Sensor Networks; WSNs)已成為最近熱門的研究 項目之一。除此之外,大量的行動裝置及無線網路更帶動了位置認知系統及服 務 (Location-aware system and service) 的需求。因此,無線網路或感測網路上 的定位系統設計,已成為一個很重要的課題。經過研究我們發現,目前在無線 網路或感測網路上的定位方法中,多半有下列幾項缺點 (1)需要加入額外的硬 體,如全球衛星定位系統(Global Position System)或者 Ultrasound Transmitter; (2)系統設定過於複雜或需額外的部署成本;(3)系統使用環境的基本限制,例 如 GPS 只能在室外使用;(4)定位演算法估計的誤差可能超過能夠容許的範圍。 為了解決上述所產生的問題,我們分析了各種定位方式的優缺點,其中, 利用訊號強度來判斷距離的定位演算法,僅根據少數已知位置的參考節點,即 可測知其他感測節點的位置,很容易完成整個系統的定位,不僅室內戶外皆可 使用,感測節點也不需要具備額外的硬體。然而目前利用訊號強度來判斷距離 的定位演算法,是使用固定的衰減因子模型係數,這樣的方法未能考慮到環境 上的差異,例如訊號源與接收端之間的障礙物,可能影響到定位演算法的精確 度。因此,在本篇論文裡我們會提出一個在無線網路或感測網路上具調適能力 的定位演算法,該演算法可以根據局部環境的不同而動態調整衰減因子模型係 數。根據此演算法,我們的定位系統可以得到較佳的定位結果。 我們在 NCTU 模擬器上進行模擬並與傳統的定位方法做一個比較,來分析 此演算法的效能。模擬的結果驗證了此方法比起傳統的定位方法在定位的精確 度上確實有顯著的進步。. i.
(4) Adaptive Attenuation Factor Model for Localization in Sensor Networks Student: Chien-Hung Chen. Advisor: Dr. Chien-Chao Tseng. Department of Computer Science and Information Engineering National Chaio Tung University Abstract As micro-electro-mechanical systems (MEMS) and wireless communication technologies advance, wireless sensor networks (WSNs) have become one of the most attractive research topics. Besides, the popularity of mobile devices and wireless networks has driven the development of location-aware systems and services. Centric to the location-aware services is the accuracy of localization method adopted in a wireless network or wireless sensor network. However current localization algorithms possess the following four drawbacks: (1) requiring additional hardware, for example the Global Position System (GPS); (2) excessive deployment cost or localization overhead; (3) environmental restriction indoor, for example, GPS works outdoors only; (4) inaccurate localization. Among the localization algorithms, the signal propagation-based localization algorithm is the best algorithm since we can use it to locate sensor nodes by using several reference sensor nodes with positions known in a priori. This approach is applicable either indoors or outdoors and no extra positioning hardware is required in the sensor nodes. However the signal propagation-based localization algorithm adopts a static attenuation factor model and cannot adjust its modeling parameters in accordance with the local environment. The environmental- unawareness of the localization algorithms may affect significantly the accuracy of localization because the obstacles between transmitters and receivers may vary one another. In this paper we present an adaptive localization algorithm for WSNs that can dynamically adjust ranging function to calculate the distance between two sensors. By adjusting the ranging function dynamically, we can estimate the location of a sensor node more accurately. We use NCTUns simulator to verify the correctness and analyze the performance of our algorithm. Simulation results show that our algorithm can indeed achieve more accurate localization by using just a small number of reference nodes in a WSN.. ii.
(5) 誌謝 這篇論文的完成,首先要向指導教授—曾建超博士致上最深的謝意,感謝 曾教授兩年來在研究方面與觀念上的啟迪,以及在百忙之中撥冗指點。 另外,我要感謝徐元瑛學姊與史永健學長在研究過程中所給予我的建議與 指導,若沒有他們我無法完成此論文。也感謝王協源老師實驗室所提供的網路 模擬器,使我能夠擁有很棒的研究平台。還要感謝實驗室中所有學長、同學、 學弟妹的支持與幫忙,謝謝他們豐富了我兩年的碩士生涯。 最後,我要感謝我的父母,感謝他們給我一個良好的環境,讓我能夠無後 顧之憂的讀書與學習,感謝他們。僅以此論文獻給我親愛的的父母,以及所有 關心我的家人,師長和朋友們。. iii.
(6) 目錄 中文摘要................................................................................................................................ i 英文摘要............................................................................................................................... ii 誌謝...................................................................................................................................... iii 目錄...................................................................................................................................... iv 表目錄.................................................................................................................................. vi 圖目錄................................................................................................................................. vii 第一章. 緒論............................................................................................................... 1. 1.1 前言....................................................................................................................... 1 1.2 研究動機............................................................................................................... 2 1.3 研究目標............................................................................................................... 3 1.4 章節簡介............................................................................................................... 3 第二章. 研究背景與相關研究................................................................................... 4. 2.1 無線感測網路 (Wireless Sensor Network) ......................................................... 4 2.2 定位演算法原理 (Localization Algorithm)......................................................... 6 2.2.1. Signal Strength Based Method .............................................................. 6. 2.2.2. Time Based Method ............................................................................ 14. 2.2.3. Connectivity Based Method ................................................................ 15. 2.2.4. Angle of Arrival Method (AoA).......................................................... 16. 2.2.5. Signal Pattern Matching Method......................................................... 16. 2.3 定位系統網路架構............................................................................................. 17 第三章. 感測網路下具調適能力的定位演算法..................................................... 19. 3.1 系統架構............................................................................................................. 19 3.1.1. 系統網路架構..................................................................................... 19. 3.1.2. 系統運作流程..................................................................................... 20. iv.
(7) 3.2 具調適能力的定位演算法 (Adaptive Localization Algorithm) ....................... 22 3.2.1. Adaptive Distance Estimation............................................................. 24. 3.2.2. Adaptive Location Estimation............................................................. 29. 3.2.3. Algorithm Discussion.......................................................................... 30. 第四章. Adaptive Localization Algorithm模擬分析................................................ 32. 4.1 NCTUns Network Simulator............................................................................... 32 4.1.1. 使用動機............................................................................................. 32. 4.1.2. 網路模擬器比較................................................................................. 32. 4.2 網路模型假設..................................................................................................... 33 4.2.1. 網路拓樸............................................................................................. 34. 4.2.2. 模擬架構............................................................................................. 34. 4.3 模擬結果分析..................................................................................................... 36 第五章. 結論與未來工作......................................................................................... 39. 參考文獻............................................................................................................................. 40. v.
(8) 表目錄 表 2.1 表 2.2 表 4.1 表 4.2. Path Loss Exponent for Different Environment , from [6] ..................................... 9 Partition Attenuation Factor , from [6].................................................................. 10 Well-known network simulator ............................................................................. 32 Fusion Center Parameter Setup ............................................................................. 36. vi.
(9) 圖目錄 圖 2.1 圖 2.2 圖 2.3 圖 2.4 圖 2.5 圖 2.6 圖 2.7 圖 2.8 圖 3.1 圖 3.2 圖 3.3 圖 3.4 圖 3.5. Sensor Network Architecture ........................................................................ 4 Average Path Loss (log-log scale)................................................................. 8 Hyperbolic Trilateration Estimation (ideal case) ........................................ 12 Hyperbolic Trilateration Estimation (non-ideal case) ................................. 12 Maximum Likelihood Estimation ............................................................... 13 ToA Method................................................................................................. 14 Connectivity-Based Localization ................................................................ 16 Direction-Based Localization...................................................................... 16 Sensor Network Architecture ...................................................................... 20 Neighbor-Signals Response ........................................................................ 20 Fusion Center Data Flow............................................................................. 21 AdaptiveLocalization() Algorithm .............................................................. 22 CalLoc_MaxBeaconCountwithBound ()Algorithm.................................... 23. 圖 3.6 圖 3.7 圖 3.8 圖 3.9 圖 3.10 圖 3.11 圖 3.12 圖 3.13 圖 4.1 圖 4.2 圖 4.3 圖 4.4 圖 4.5 圖 4.6. Deal Node的局部環境................................................................................ 25 Deal Node訊號範圍.................................................................................... 26 Deal Node估計位置.................................................................................... 26 FindParameter() Algorithm ......................................................................... 27 Case1: 在Deal Node範圍 & Decay < Decay_Bound ............................... 28 Case2: 在Deal Node範圍 & Deal Node方向 ........................................... 28 Case3: 在Deal Node的方向上................................................................... 29 Deal Node訊號範圍<Decay_Bound........................................................... 31 模擬環境..................................................................................................... 33 模擬網路拓樸............................................................................................. 34 模擬分析,感測器數目=40....................................................................... 37 模擬分析,感測器數目=60....................................................................... 37 模擬分析,感測器數目=80....................................................................... 38 模擬分析,感測器數目=40,60,80............................................................. 38. vii.
(10) 第一章 1.1. 緒論. 前言 由於近年來無線通訊技術、電池技術的發展,和各種感測材質的研發以及 改進下,促使微小的感測器(Sensor)具備有感測、無線通訊、以及運算的能力。 感測器可感測環境中我們所感興趣的事物,例如溫度以及目標物的移動,並將 感測到的資料先經由簡單的運算處理過後,將這些資料透過無線網路傳遞給資 料收集中心(Fusion Center),再經由資料收集中心統整所有感測器傳遞過來的 資料,整理出使用者感興趣的資訊。最後,使用者便能依資料收集中心所整理 的資訊,了解環境的狀態。無線感測網路(Wireless Sensor Network)與無線隨意 網路(Wireless Ad-hoc Network)一樣,不具有基礎建設(Infrastructure),是由一 個到數個的資料收集中心,以及數量眾多的感測器構成,使用者可隨意的擺放 感測器以及資料收集中心,非常具有彈性,也因為這樣的彈性,造就了無線感 測網路非常多的應用,從智慧型家庭網路、自然環境的感測例如森林火災的預 防,到生物以及醫療的領域上皆有相當多的應用。. 就一般的無線感測網路而言,提供位置認知的服務是很重要的,例如火災 監測系統來說,使用者除了要知道火災的發生之外,還必須曉得火災發生的位 置,這類的系統,皆有提供位置認知功能的需求 [1]。除此之外,感測器的位 置資訊還能夠幫助資料傳送的繞徑(routing) [2] [3],以及協助了解整個網路拓 樸的覆蓋範圍 [4]。要提供位置認知的服務,無線感測網路通常有定位功能的 需求。但是,若我們直接將目前無線網路的定位方式應用在無線感測網路上, 目前並沒有一個很好的解決方案。例如,要提供定位的功能,最直接的方式是 在感測器上裝置全球衛星定位系統(Global Position System, GPS)模組,可以提 供大約 10 公尺的定位準確度,但由於無線感測網路通常由大量的感測器所組 成,若要在每個感測器上皆配備 GPS 模組,將因此花費昂貴的硬體成本。所 以,就成本的考量上,使用 GPS 模組將造成系統成本的負擔。其他使用 GPS 的缺點如下:. z GPS 無法使用在室內或有障礙物阻隔的環境當中,環境裡的障礙物會影 響衛星的 Line-of-sight 訊號傳播,而影響到 GPS 的定位功能。 z 感測器必須負擔 GPS 所需的電力,而使得感測器的使用壽命降低。 z GPS 的模組會佔據一定體積,而增加整個感測器的體積。. 1.
(11) 另一種無線網路的定位方法為訊號樣本比對法 (Signal Pattern Matching), 這個方法同樣也能夠提供精確的定位,例如 RADAR system [5]。而這個方法 必須由系統的管理人員事先走訪整個區域以建立訊號樣本資料庫,再利用比對 使用者的訊號樣本以及資料庫中的訊號樣本,找出最接近的位置。這個方法具 備基礎建設做為定位的參考點,而無線感測網路並不具備基礎建設,所以這個 方法並不適用於無線感測網路。. 除了上述介紹的兩種方法之外,我們也可以利用目前在無線網路上的定位 演算法來定位,但這個方法的前提是必須有一部分的感測器已事先知道自己的 位置,以這些感測器當作系統中的參考點,再利用這些參考點以及所能夠得到 的訊號強度、參考點與未知位置感測器的相對角度、或者是訊號傳遞到未知位 置感測器的時間,代入定位演算法,以求出未知位置感測器的估計位置。但是 由於這些經由定位演算法所求出的估計位置,常常會受到其他因素例如障礙 物、多重路徑干擾(multipath)、環境的差異性,而影響估計位置的精確度,所 以就使用演算法定位的方法而言,通常有使用環境上的限制以及定位不夠準確 的問題。. 1.2. 研究動機 審視目前無線網路定位的方法可知,我們歸納目前無線網路定位的方式, 若使用在無線感測網路上,可能的缺點有: z. 額外硬體成本的負擔。例如使用 GPS 來定位的系統,其感測器必須裝 置 GPS 模組。. z. 需要額外花費人力來設定系統,例如訊號樣本比對法需事先建立樣本 資料庫。. z. 使用環境的限制,例如使用 GPS 來定位的系統只能在室外使用。. z. 估計的誤差可能超過能夠容許的範圍。例如使用訊號衰減來定位的方 式,在室內的環境中因障礙物的影響會有很大的誤差。. 由以上的缺點來分析,我們可以知道目前在無線網路上定位的方式並不是 十分適用於無線感測網路,所以,我們的研究動機即在於能夠找到一個普遍的 方法,除了能夠克服環境的限制外,也希望能夠減少感測器的成本、體積,以 及功率的消耗,並減少定位所產生的誤差。. 2.
(12) 1.3. 研究目標 研究過無線網路上的定位方式過後,我們發現利用訊號衰減模型(Radio Propagation Model)來定位的方法,若應用在無線感測網路上,是一個合理的方 法。其理由是(1)不需額外的硬體成本,因此可以降低成本及電力的消耗(2)使 用環境並無限制,室內或者戶外環境皆可。但因為此方法在估計距離時,可能 會因所處環境的不同,而受到其他因素例如障礙物、multipath、環境的差異性… 等因素的影響,而造成估計錯誤,本篇論文的目的主要即在分析這些因素如何 影響距離的估計,並嘗試解決這些問題,以提高估計距離的精確度。我們認為 若能夠解決 Distance Estimation 時所造成的估計錯誤,便能夠提高整個定位的 精確度。. 除此之外,我們希望設計完整的系統架構,所以必須考慮此系統適合分散 式(Distributed)或者集中式的架構(Centralized),系統是否允許感測器位置的移 動…等。因此我們的研究目標如下:. 1.4. z. 分析所有造成訊號衰減的因素,並設計出較精確的距離估計(Distance Estimation)以及位置估計(Localization Estimation)演算法,並嘗試分析 演算法的優缺點。. z. 設計出完整的系統架構及系統的運作流程,並研究允許感測器移動的 辦法。. 章節簡介 關於這篇論文的內容簡述如下:在第二章「研究背景與相關內容研究」裡, 我們會對無線感測網路做一個介紹,說明無線感測網路的組成單元、特性、以 及限制。再來我們會介紹目前常見的無線網路定位方法,分析這些方法的原理 以及優缺點。我們將會在第三章提出我們的方法:在 3.1 節裡介紹我們提出的 系 統 架 構 以 及 系 統 運 作 的 流 程 。 而 3.2 節 則 介 紹 Adaptive Localization Algorithm。在第四章裡,我們會介紹我們如何在 NCTUns 模擬 Adaptive Localization Algorithm,並與以前的方法做比較。最後在第五章「結論與未來 工作」的部分,將對此篇論文做一個總結,並對未來能夠繼續研究的方向提出 一些心得與看法。. 3.
(13) 第二章 2.1. 研究背景與相關研究. 無線感測網路 (Wireless Sensor Network) 無線感測網路基本上由大量且微小的感測器、以及一個或數個資料收集中 心(Fusion Center)所構成,而且與無線隨意網路一樣,並不具有基礎建設,主 要功能是透過有計畫或者隨意散佈的感測器,來收集感測資料並透過無線網路 回報給資料收集中心,並經由資料收集中心將所感測到的資料處理過後,回報 有利用價值的資訊給觀察者(Observer),如圖 2.1。而主要的組成單元描述如下:. Fusion Center. Sensor. Observer 圖 2.1. Sensor Network Architecture. z. 感測器(Sensor):用來感測某種物理現象的設備,並具有無線通訊及處 理資訊的能力。. z. 資料收集中心(Fusion Center):負責管理感測網路上的感測器,以及收 集由感測器所感測的結果,並將結果處理後轉為有用的資訊傳回給觀 察者。. z. 觀察者(Observer):分析資訊的使用者。. 其中,因為感測器的電源由電池所提供,電池的壽命長短足以影響整個感 測網路的運作,為了節省傳輸的時電力消耗,感測器的傳輸距離一般而言為數 公尺至數十公尺。因此如果資料收集中心距離感測器太遠時,感測器就需要利 用繞徑的方法將資料經由多個感測器組成的路徑傳回資料收集中心。感測器多 為微小且便宜的裝置,因而可大量放置於環境中形成一個無線感測網路以便進 行環境感測。由於感測器的個數從數百至數十萬皆有可能,使得感測網路的管 理非常困難,加上感測器的電池可能無法置換,因此能量控制幾乎是所有感測. 4.
(14) 器設計及網路管理首要考慮的重點。再加上感測器需為便宜的裝置,它們故障 的機會相形提高,因而容錯(fault tolerant)的機制亦不可或缺。 感測器所能感應的現象,決定了整個感測網路提供的服務。由於目前的研 究發展,不管是化學、生物,以及物理方面,新的感測器一再地推陳出新,這 些感應器可以偵測周遭的環境狀況諸如: z. 溫度. z. 溼度. z. 車輛的移動. z. 照明狀況. z. 壓力. z. 噪音分貝值. z. 感測物體存在於否的判斷. z. 語音、感測物體的大小與方向. 而這些具有感應能力的微小感測器經由無線網路傳遞感測資料,透過這些 感應器感測的能力、無線通訊的技術,造就了無線感測網路非常多的應用,我 們可將這些在無線感測網路上的應用做一個分類,分別為家庭、生物/醫療、 軍事、環境以及其他商業應用: z. 家庭:在家庭的應用上,可將微小的感應器鑲嵌在家電用品或電子裝 置上,透過無線通訊的資料傳輸,我們便可以在遠端掌控家中的環境, 或者讓家電能夠達到自動化的目標。例如家裡的自動照明設備,自動 溫控,電子保全…等等。. z. 生物/醫療:在生物以及醫療的應用上,將感測器佈署於房子裏及人的 身上,我們可以即時遠距監測偵測病人的心跳、血壓、葡萄糖指數, 或者追蹤醫生和病人在醫院裡的移動,以方便快速的發現問題及反應 狀況。. z. 戰場:在戰場上的應用,可以利用感測器來偵查敵人的生物或者化學 攻擊的種類,戰爭損害的估計,目標物的追蹤,也可在友軍的人員、 裝備及軍火上加裝感測器以供識別…等。. z. 環境:在環境上可以將幾百萬個感測器佈署於森林或溪流中,用來偵 測森林火災或者洪水的發生,除此之外,還可以用於交通上的管理以. 5.
(15) 及監測,感測交通流量或者車禍的發生。 z. 其他商業應用:在其他商業應用方面,也有相當廣泛的應用,諸如貨 物的監控,賣場顧客位置的追蹤,自動問題回報,產品品質測量…等。. 由於感測器硬體及組成結構的特性,使得無線感測網路與傳統無線網路有 些許的不同,我們綜合無線感測網路的特性與限制,分述如下:. 2.2. z. 由大量且微小的感測器組織而成,負責感測及傳遞資料到控制中心, 這些感測器有成本、體積、及電力的限制,尤其是消耗電力的限制, 不管是硬體的製作,繞徑演算法的設計,皆須考慮到功率的消耗。. z. 感測器的位置不須經由事先的規劃,所以感測網路必須要有自我組織 的能力,這允許感測器能夠即時且隨意的部署在任意的地形或災區的 現場。. z. 無線感測網路的網路拓樸(Topology)會隨著時間而經常變動,這點類似 於無線隨意網路,也因此在繞徑演算法的設計上,除了要考慮到功率 的消耗之外,必須能夠支援動態調整的特性。. z. 而與無線隨意網路不同的地方在於,無線感測網路通常將資料傳遞給 資料收集中心,而無線隨意網路卻必須支援點對點的連線。另一個不 同點是感測器的個數遠遠大於無線隨意網路的數目。. z. 由於成本、體積、及電力的限制,目前無線感測網路尚未能夠提供豐 富的多媒體的應用。. 定位演算法原理 (Localization Algorithm) 無線網路上的定位演算法是藉由某部分已知位置的感測器當作參考點,以 這些感測器當作系統中的參考點,再利用這些參考點以及所能夠得到的訊號強 度、參考點與未知位置感測器的相對角度、或者是訊號傳遞到未知位置感測器 的時間,代入定位演算法,最後求出未知位置感測器的估計位置。我們介紹幾 種常見的定位方法如下:. 2.2.1. Signal Strength Based Method Signal Strength Based Method 是利用訊號衰減模型的原理來定位的一種方 法,這個方法可分為兩個步驟:第一個步驟為距離估計,第二個步驟為位置估 計。在第一個步驟中,可利用訊號隨距離而衰減的基本原理[6]來推斷出與其 他已知位置參考點的距離,而第二個步驟則依照在第一個步驟所得到與參考點. 6.
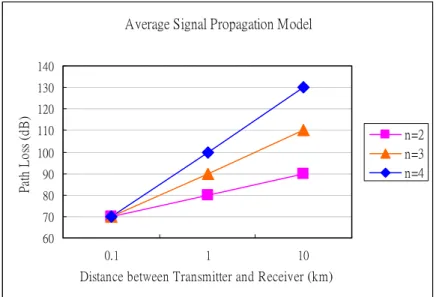
(16) 的 距 離 , 利 用 三 邊 定 位 法 (Trilateration) 或 者 最 大 可 能 性 估 計 法 (Maximum Likelihood Estimation)求出估計的位置。. 2.2.1.1 距離估計(Distance Estimation) 在無線網路卡上,我們可以由 RSSI (Received Signal Strength Indicator)獲取 接收端(Receiver)收到的訊號大小值,RSSI 是由 IEEE 802.11 標準所定義的一 個整數值,介於 0~255 之間,可用來判斷 256 種訊號大小的等級。到目前為止, 沒有一家廠商將訊號等級完整地分為 256 個等級,每家廠商皆指定特定的 RSSI 整數值為最大值(RSSI_MAX),例如 Cisco 的 RSSI 最大值便設定為 100,Atheros 則為 60。讀取 RSSI 值後必須要將 RSSI 值轉換為物理單位 (dBm or mW),才 能得知訊號大小物理值。得知接收端的訊號大小後,若能得到訊號傳送端 (Transmitter)傳送訊號時的訊號大小,相減便可以計算出有效的訊號衰減。最 後將此訊號衰減代入訊號衰減模型(Signal Propagation Model),計算出訊號傳 送端到接收端的距離。舉例來說,若在 Atheros 的網卡上得知 RSSI=60,經由 查表可得知接收端的訊號大小為-35dBm,若此訊號在傳送端傳送時訊號大小 為 20dB,則我們可得知訊號衰減為 20-(-35)=55dB。. 訊號衰減模型主要用於 RF 訊號(radio frequency signal),探討訊號隨距離而 衰減的關係,我們可將訊號衰減代入訊號衰減模型求出距離。以下我們將說明 訊號衰減模型,不管是經由理論或者測量統計,皆可以得知平均訊號衰減與距 離成對數正比,如公式(1):. PL(d ) ∝ (. d n ) d0. (1). 或者可表示成公式(2):. PL(d )[dB] = PL(d 0 )[dB ] + 10n log(. d ) d0. (2). 其中 n 代表訊號衰減冪次,表示因距離而造成訊號衰減的速率, d 0 是一個 鄰近訊號傳送端的參考距離,通常為了方便起見,我們會取單位公尺來代表,. PL 則代表平均衰減,若以 log-log 度量來繪圖時,所繪出來的會是以 10n 當 作斜率的一條直線,我們可由圖 2.2 看出 n 與訊號衰減的關係,X 軸表示接收 端與訊號傳送端的距離,Y 軸表示訊號衰減,當 n 越大時,在相同的距離下, 會有較大的訊號衰減。而 n 的值取決於局部環境,在 Free Space 下,n=2,當 有障礙物時,n 會呈現較高的值。. 7.
(17) Average Signal Propagation Model 140 130. Path Loss (dB). 120 110. n=2 n=3 n=4. 100 90 80 70 60 0.1. 1. 10. Distance between Transmitter and Receiver (km). 圖 2.2. Average Path Loss (log-log scale). 公式 (2) 並未考慮到周圍的環境會影響到訊號衰減的值,使得測量的值. PL[dB]與平均的值 PL [dB]不同,若依實際的測量結果顯示,訊號衰減值與距 離的關係應該如公式(3):. PL(d )[dB] = PL(d )[dB] + X σ = PL(d 0 )[dB] + 10n log(. d ) + Xσ d0. 其中 PL(d )[dB] = Pt [dBm] − Pr [dBm]. (3.a) (3.b). X σ 在此處代表 zero-mean Gaussian distributed random variable(in dB) with standard deviation σ (also in dB)。當 σ 越大時,代表所測得的訊號衰減值越分 散。 當考慮到室內以及障礙物時,則可以更具一般性的公式表示:. d ) + ∑ PAF [dB ] d0. (4). d ) + FAF [dB ] + ∑ PAF [dB] d0. (5). PL(d )[dB] = PL(d 0 )[dB ] + 10 N mf Log ( 或者可表示為:. PL(d )[dB] = PL(d 0 )[dB ] + 10 N sf Log (. 8.
(18) 如公式(4)(5),稱之為衰減因子模型(Attenuation Factor Model)。與公式(2)不同 的地方在於公式(4)(5)考慮到室內樓層及障礙物。 N sf (single-floor) 代表訊號 傳送端與接收端皆在同一層樓時的訊號衰減冪次、 N mf (multi-floor) 則代表訊 號傳送端與接收端不在同一層樓時的訊號衰減冪次,FAF[dB]為樓層衰減因子 (Floor Attenuation Factor),若訊號傳送端與接收端不在同一層樓,我們可以引 用(4)式,但必須算出不同樓層的 N mf ,或者利用 N sf 再加上而樓層衰減因子求 得訊號衰減。PAF 則為障礙物衰減因子(Partition Attenuation Factor),當訊號傳 送端與傳送端的連線上有障礙物存在時,則必須加上障礙物衰減因子,(4)(5) 兩式使得訊號衰減模型更具彈性,也使得預測與實際測量之間的標準差降低到 大約 4dB。基本上,(4)或(5)都可以表示成為下式:. PL(d )[dB] = PL(d 0 ) + 10nLog (. d )+ X d0. (6). 由實際狀況可知,n 或 X 會受到外在環境的影響,諸如溫度、溼度、天線 的高度,障礙物…等等,如表 2.1 及表 2.2。. Environment. Path Loss Exponent (n). Free space. 2. Urban area cellular radio. 2.7 ~ 3.5. In building line-of-sight. 1.6 ~ 1.8. Obstructed in building. 4 ~6. Obstructed in factories. 2~3. 表 2.1 Path Loss Exponent for Different Environment , from [6]. 9.
(19) Material Type. Partition Attenuation Factor (X[dB]). Concrete wall. 8~15. Concrete floor. 10. All metal. 26. Foil insulation. 3.9. Dry plywood (3/4 in) – 1 sheet. 1. 表 2.2 Partition Attenuation Factor , from [6] 在實際情況裡,我們是由當時環境所測量的訊號衰減以及距離的數據,透 過線性回歸的方式回推求得訊號衰減模型裡的 n 及 X,所以因為環境的不同, 便可以求得不同的 n 及 X。在求出 n 及 X 後,我們便可將所測量的訊號衰減 代入訊號衰減模型公式裡求出估計的距離。這種方式使得我們在不同的環境 下,都需要有測量訊號衰減以及距離數據的動作,且求出來的 n 及 X,並無法 表示出局部環境的狀況。. 電磁波傳遞的物理現象可分為反射 (Reflection) 、干涉 (Interference) 、繞射 (Diffraction)以及散射(Scattering)。反射是當傳遞的電磁波遇到物體後,而朝反 方向行徑的現象,干涉則為兩個波長相同的波互相重疊時,互相影響振幅的干 擾現象,繞射現象過電磁波經過狹縫或障礙物的邊緣時沿著障礙物的邊緣偏折 的現象,散射則為電磁波經過粗糙的平面時所引起的現象。. 由以上電磁波傳遞的物理現象我們可以得知,距離並不是唯一影響訊號衰 減的因素,例如當溫度與溼度有所不同時,會影響到訊號所傳遞的媒介,訊號 的衰減會因此受到影響。當訊號遇到障礙物時,因傳遞介質的不同,也會影響 到訊號的衰減。訊號除了直線傳播到目的外,若因不同物體的反射而以不同路 徑到達目地,而造成訊號的延遲效應,影響到之後傳遞到接收端的訊號,當訊 號經過這種影響後,振幅會產生劇烈變化,而產生 multipath 的問題。我們分 析可能影響訊號衰減的因素,列之如下:. 10.
(20) z. 溫度、溼度 溫度、溼度會影響訊號傳遞的媒介,所以會影響到訊號的衰減。. z. 障礙物 當訊號傳送端與接收端之間的障礙物阻擋時(在室外的情況也許是樹木、 建築物,在室內的情況也許是牆壁、櫃子),訊號的傳遞便會受到影響, 訊號經過牆壁之後即會有很大的衰減,若我們沒有考慮到此因素,會誤認 為是訊號傳送端與接收端之間的距離所造成。. z. 天線高度 當訊號傳送端離地面很近時,訊號衰減較快,當訊號傳送端離地面有一段 距離時,訊號的衰減較慢,例如 Wireless Integrated Network System (WINS) [7],若將感測器置於地面,訊號的範圍只有大約 30 公尺,而將感測器置 於離地面 1.5 公尺高度時,訊號的傳輸範圍可達到 100 公尺。. z. 訊號傳送端或接收端天線的方向 當訊號傳送端與接收端的天線若非全方向天線,訊號傳送端與接收端的天 線方向便會影響訊號的衰減。. z. multipath 我們在之前提到,multipath 是訊號經由不同路徑到達接收端,進而影響接 收端的接收訊號大小的問題,目前有 rake algorithm 以及硬體上採用 dual antenna 嘗試解決 multipath 所引起的問題。. z. fading in time 在此處探討的 fading 是訊號接收端所接收到某一訊號傳送端的訊號大小 會隨著時間而產生時大時小的問題,我們可以嘗試利用一段時間的平均, 以避免得到較高或較低的訊號值。. 以上介紹完訊號衰減的模型,分析以及如何計算距離的方式,我們將在下 文中介紹位置估計的方法。. 2.2.1.2 位置估計 (Location Estimation) 當我們求得未知位置的點與各個已知位置參考點的距離時,第二個步驟為 利用這些距離推算出未知位置感測器的位置,目前最廣泛使用來估計位置的方 法如下:. 11.
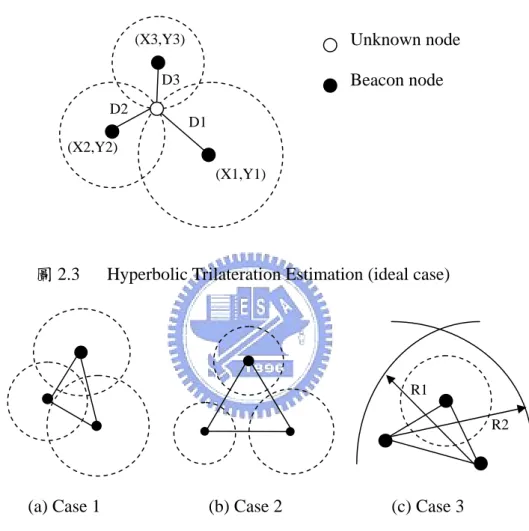
(21) Hyperbolic Trilateration Estimation :如圖 2.4 ,我們稱已知位置的參考點為 Beacon Node,而未知位置的點為unknown Node。藉著以 3 個Beacon Node的位 置及估計出來到Unknown Node的三個距離,則Unknown Node的位置會在三個 圓的交會點,如圖 2.3,但此法的缺點為三個估計出來的距離所畫成的圓通常 無法交會在同一個點,當造成這個例外情形時,則很難以計算出接收端的估計 位置。第二個缺點是若是其中有一個距離估計誤差過大,則對所計算出的位置 影響很大,。. Unknown node. (X3,Y3). Beacon node. D3 D2. D1. (X2,Y2) (X1,Y1). 圖 2.3. Hyperbolic Trilateration Estimation (ideal case). R1 R2. (a) Case 1. 圖 2.4. (b) Case 2. (c) Case 3. Hyperbolic Trilateration Estimation (non-ideal case). 在圖 2.4 的 Case1 當中,3 個點所估計的距離過大,而使得以距離為半徑, 已知點為圓心所繪成的 3 個圓無法交會在一起,如此則無法求得三個圓的交會 點,只能找到 3 個圓重疊部分所形成的一個三角形,我們可以取這個三角形的 質量重心為我們估計的座標。Case2 的情況是當計算出的距離皆過小而使得繪 成的 3 個圓沒有交點時的狀況,而 Case3 的情況同樣也是無法交會於一點的例 子,詳細的介紹可參見[8]。. 12.
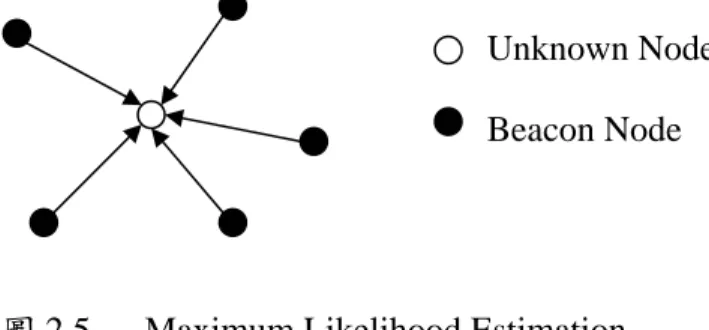
(22) Maximum Likelihood Estimation:除了Hyperbolic Trilateration Estimation之外, Maximum Likelihood Estimation同樣也是估計位置的方法之一。它主要是利用 線性回歸的方式,藉由估計距離以及Beacon Node的位置,求出Unknown Node 的位置,由於他是透過多個Beacon Node算出Unknown Node的位置,相信估計 距離的誤差經過平均後會變小,如圖 2.5,只要一個Unknown Node可以接收到 3 個以上Beacon Nodes所發出的訊號,則透過Maximum Likelihood Estimation, 我們可以計算出這個Unknown Node的位置。. Unknown Node Beacon Node. 圖 2.5. Maximum Likelihood Estimation. 現在我們推導 Maximum Likelihood Method。首先,假設 x0 與 y 0 為 Unknown Node 的二維座標, xi 與 y i 為第 i 個 Beacon Node 的二維座標,i=1,2,3...k。對 此 Unknown Node 來說,可接收到這 k 個 Beacon Node 的 ultrasound pulse,s 為 ultrasound pulse propagation speed, t i 0 則為第 i 個 Beacon Node 與 Unknown. Node 之間所需的 ultrasound pulse propagation time,理想狀態下,我們可以得 到(7)式,將(7)式平方後移位我們可以得到(8)式,i=1,2,3...k,共有 k 個方程式, 為了形成 Y = bX 的矩陣形式以求得回歸係數,所以我們需要消去 (8) 式中的 ( X 0 + Y0 ) 項,我們將 1~k-1 個方程式皆與第 k 個方程式相減,得到(9)式: 2. 2. s × t i 0 = ( xi − x0 ) 2 + ( y i − y 0 ) 2. (7). − xi − y i = ( x0 + y 0 ) + x0 (−2 xi ) + y 0 (−2 y i ) − s 2 t i 0 2. 2. 2. 2. 2. (8). − xi − y i + x k + y k = 2 x 0 ( x k − xi ) + 2 y 0 ( y k − y i ) + s 2 (t k 0 − t i 0 ) 2. 2. 2. 2. 2. 2. (9). 公 式 (9) 符 合 矩 陣 Y = bX 的 形 式 所 以 可 代 入 矩 陣 回 歸 係 數 公 式 求 b ,. b = ( X T X ) −1 X T Y 以求得矩陣回歸係數,其中:. 13.
(23) 2 2 ⎡ 2( x k − x1 ) t k 0 − t10 ⎤ 2( y k − y1 ) ⎢ 2 2 ⎥ t k 0 − t 20 ⎥ 2( x k − x 2 ) 2( y k − y 2 ) ⎢ X = ⎢ ⎥ M M M ⎢ 2 2⎥ ⎢⎣2( x k − x( k −1) ) 2( y k − y ( k −1) ) t k 0 − t ( k −1) 0 ⎥⎦. ⎡ − x1 2 − y1 2 + x k 2 + y k 2 ⎤ ⎢ ⎥ 2 2 2 2 − x2 − y 2 + xk + y k ⎢ ⎥ Y= ⎢ ⎥ M ⎢ 2 2 2 2⎥ ⎢⎣− x( k −1) − y ( k −1) + x k + y k ⎥⎦. ⎡ x0 ⎤ b = ⎢⎢ y 0 ⎥⎥ ⎢⎣ s 2 ⎥⎦ 以及. 若要求得矩陣回歸係數,需滿足至少有 3 個 Beacon Node,若有 4 個以上的 Beacon Node,則我們還可以計算出 ultrasound pulse propagation speed。. 2.2.2. Time Based Method 在 Time-Based Method 的方法裡,同樣也分為距離估計以及位置估計兩個 步驟。在距離的估計裡,我們分別記錄訊號傳送與到達的時間,便可以算出傳 送訊號所需的時間差,再利用時間差與訊號傳遞的速度相乘,便可以得到訊號 來源與接收端的距離,我們稱這樣的方法為 ToA (time-of-arrival) Method。如 圖 2.6,在訊號傳送端我們同時傳送 radio signal 以及 ultrasound pulse。由於 radio signal 的速度遠大於 ultrasound pulse,我們忽略掉 radio signal 傳遞的時間,只 計算出兩者到達的時間差(t2-t1)後,再乘以 ultrasound pulse 的速度 s,即可得 到估計的距離,而得到距離之後,同樣也可以應用 Maximum Likelihood Method 或者 Hyperbolic Trilateration Estimation 法求得位置:. transmitter. receiver. radio signal t1 ultrasound pulse t2 distance. 圖 2.6. distance = (t2-t1)*s. ToA Method. 著名的 GPS 系統即是利用 ToA 原理的系統之一。早在 1993 年,GPS 系統. 14.
(24) 便已部署完成[9],由 24 顆衛星所組成,分成六個軌道,運行於約 20200 公里 的高空,繞行地球一周約 12 小時。並且能提供精確的定位,如果在沒有干擾 碼的情況下,精確度可達到 10 公尺。如果再加上地面上的輔助系統,如差分 GPS(Differential GPS, DGPS)在地面上增設基地台,以修正接收器的觀測值, 其定位精度可達 2 至 5 公尺。但其缺點為只能在室外使用,再加上耗電量及硬 體成本,並不適合用於無線感測網路上。 檢視 ToA 的方法,我們可以發現 ToA 需要具備第二訊號傳送端例如超音波 (ultrasound)或者紅外線(infrared),需要額外的硬體,因此與我們的目標並不符 合。. 2.2.3. Connectivity Based Method 這個定位的方法建立在兩個基本假設:. 1.. Perfect spherical radio propagation.. 2.. Identical transmission range (power) for all radios.. 第一個假設是訊號的傳遞不受其他例如障礙物等的影響,是一個理想的訊號傳 遞。第二個假設則是所有訊號源輸出訊號的功率皆相同,因此所有訊號源皆有 相同的訊號傳遞半徑。有了這兩個基本的假設,未知點的座標的計算方法是: 若未知位置的感測器接收到某個已知位置的感測器的訊號且訊號大於某個 threshold,我們稱此未知位置感測器與已知位置感測器相連(connected)。假使 某未知位置器與鄰近的 k 個感測器相連,這 k 個感測器的座標位置分別為 ( X, ,Y2 )…( X , ,Yest )如公式 1 Y1 )、( X 2 k Yk ),則此未知座標感測器的座標( X est. (10): ( X est , Yest ) = (. X 1 + X 2 + K + X k Y1 + Y2 + L + Yk , ) k k. (10). 如公式 (10) ,未知座標感測器的位置其實是由鄰近相連參考點的幾何中心算 出,如圖 2.7:. d: Separation distance between adjacent reference points R: Transmission range of the reference point. R d. 15.
(25) 圖 2.7. Connectivity-Based Localization. R 越大,可以得到越精確的位置。但實際上我們由以上的假 d 設可知,若訊號的衰減受到其他因素影響,例如障礙物,則容易影響定位的精 確度,再者,每個感測器經過長時間的運作後,傳送的訊號強度也會受有限的 電源所影響,進而影響定位的準確度。總而言之,這個系統在戶外的環境中會 由圖中可知,. 有較好的定位效果,因為訊號較不易受其他因素影響。而且. R 越大,越能得 d. 到精密的定位,詳細說明請參照[10]。. 2.2.4. Angle of Arrival Method (AoA) AoA 必須具備額外的硬體,能夠判別訊號傳送端與接收端所形成的相對角 度,在至少獲得兩個已知位置的訊號傳送端的相對角度後,藉著所得到的角度 與三角學中 Sines Rule 與 Cosines Rule,我們可以計算出接收端的位置,如圖 2.8。而 AoA 的主要缺點為需要具備額外的指向性天線以判別訊號來源的角度。. α2. α1. Possible Location 圖 2.8. 2.2.5. Direction-Based Localization. Signal Pattern Matching Method 訊號樣本比對法(Signal Pattern Matching Method)主要是利用已經建立好的 訊號樣本資料庫(signal pattern database),使用比對的方式,找出最接近的訊號 樣本(pattern),以決定目前的位置。例如 RADAR[5],優點為能夠追蹤室內使 用者的位置。要使用此系統必須分為兩個階段,第一個階段為離線階段(off-line phase),此時系統管理員必須走訪整個環境,在走訪的過程當中收集每個地方 所可以接收到的訊號樣本,用以建立訊號樣本資料庫,第二個階段為線上階段 (on-line phase),此時使用者用此刻所接收到的訊號樣本比對訊號樣本資料庫的 資訊,找到最接近的訊號樣本,由此訊號樣本的紀錄位置當作使用者目前的位 置。. 此種系統相對於其他室內無線定位系統有相對較好的精確度,因為此種系. 16.
(26) 統在面臨 multipath 的問題時,會有比較好的解決能力,但此種系統需要基礎 建設的佈建,以及事先部署時必須花費時間成本以建立訊號樣本資料庫,則為 此種系統的缺點。. 2.3. 定位系統網路架構 我們在第 2.2 節當中介紹了目前無線網路或者無線感測網路上定位演算法 的各種原理。除了定位的原理之外,在無線網路的定位上若依系統網路架構來 區分,大致上可以分成兩種,第一種類型為 infrastructure class,這一類型的定 位 系 統 需 要 部 署 基 本 的 基 礎 建 設 , 通 常 針 對 mobile user 定 位 , 提 供 location-aware service。而另一類型為 ad-hoc class,此種類型的系統不需要預 先安裝的基礎建設,為 ad-hoc 系統,由系統裡的每個器執行分散式演算法計 算自己的位置,有關此兩種類別的定位系統,敘述如下:. z. Infrastructure Class Infrastructure class 的特色是需要先部署基本的基礎建設,而系統的使用 者可以使用此基礎建設所提供的定位功能。如前面所介紹的 GPS 系統, 它的基礎建設包含繞行於地球軌道上的 24 顆衛星,以及了追蹤及控制衛 星運轉,所設置的地面管制站。而 RADAR 同樣也是屬於 Infrastructure class 的系統之一,它必須依靠無線橋接器(Access Point)收集訊號強度資訊,而 使用者在系統中定位時,必須處於三個以上的無線橋接器覆蓋範圍,才能 夠得到精確的定位。. z. Ad-hoc Class 在 這 一 類 別 的 定 位 系 統 較 為 稀 少 , 如 GPS-less Low Cost Outdoor Localization[10]及 AHLOS (Ad-Hoc Localization System)[11],這種系統的 前提是必須要有小部份的感測器知道自己的位置,這些已知位置的感測 器 為 系 統 的 reference point , 我 們 透 過 這 些 Beacon Node 及 在 每 個. Unknown Node 上執行的 localization algorithm 來做定位。GPS-less Low Cost Outdoor Localization 收到 Beacon Node 的訊號後,計算這些 Beacon Node 的幾何中心當作自己的位置。而 AHLOS 是由每一個感測器執行分 散式的演算法,在測量距離方面提出了 RF-based 及 TOA 的方式,利用 前述其中之一的測距方式得到 Unknown Node 與 Beacon Nodes 的距離。 而估計位置方面則利用 Maximum likelihood 來定位,所以,每一個感測 器可由鄰近的 Beacon Nodes 推算出自己的位置,但也因為如此,感測器 必須要有額外的運算負擔,同時系統無法得知整個網路拓樸的情況。. 17.
(27) GPS-less Low Cost Outdoor Localization 雖 然 在 分 類 上 屬 於 Connectivity-Based Method,但仍會受到訊號衰減而影響其精確度,凡是 使用訊號衰減與距離的關係來做定位的法則,皆會受到局部環境、障礙 物等的影響,而使定位的誤差增大,因為距離並不是影響訊號衰減的唯 一因素。. 18.
(28) 第三章. 感測網路下具調適能力的定位演算法. 這本章中,我們將詳細描述我們所設計的系統架構,包含架構中各個組成 單元,此系統架構的運作流程,介紹完系統架構之後,我們會提出在此架構上 所設計的感測網路下具調適能力的定位演算法。. 3.1 3.1.1. 系統架構 系統網路架構 在 AHLOS[11]中提出了一個分散式的無線感測網路架構,感應器具有一部 分運算能力並且能夠執行分散式演算法依附近的參考點自己運算出位置。我們 認為如此有兩個缺點:第一個缺點是感測器必須增加額外的計算負擔,而第二 個缺點則是如此感測器只知道局部環境的位置,系統無法掌握整個網路拓僕。 我們所提出的系統架構與傳統的無線感測網路一樣,所不同的是,感測器將不 會自己計算出位置,而是完全將接收到參考點的位置以及訊號大小傳遞給資料 收集中心,由具有強大計算能力的資料收集中心統一計算出所有未知位置感測 器的位置,除此之外,資料收集中心可因此了解整個網路拓樸,而掌握整個系 統內所有感測器的覆蓋範圍,也能提供系統 Georouting 或者 Geocasting 的需 求。首先,我們先介紹資料收集中心以及感測器的任務,描述如下: z. 資料收集中心. 需收集每個感測器所得到的訊號大小以及參考點的位置,並執行集中式 (Centralized)演算法計算出所有感測器的位置。除此之外,尚須管理感測網路 上的感測器,並收集由感測器所感測的結果,將結果處理後轉為有用的資訊傳 回給觀察者。 z. 感測器. 此系統需要有部分的感測器來做為定位程式的參考點,我們稱這些已知位 置的感測器為 Beacon Node,而其他還未知位置的感測器則為 Unknown Node。. Beacon Node 可能是某部分裝置 GPS 模組的感測器,或者是透過人工設定部份 的感測器。在室內中,也可拿基礎建設的無線橋接器當作 Beacon Node。這些 已知位置的 Beacon Node 為系統中定位的參考點,當 Unknown Node 接收到 Beacon Node 的訊號之後,會將此資訊傳遞給資料收集中心,由資料收集中心 來計算 Unknown Node 的位置。除此之外,感測器尚須具備感測物理現象及轉 送資料的能力。 以上為系統中資料收集中心以及感測器的任務,由於我們主要所探討的對 象是在此架構上的定位演算法(Localization Algorithm),我們將不討論在此網路. 19.
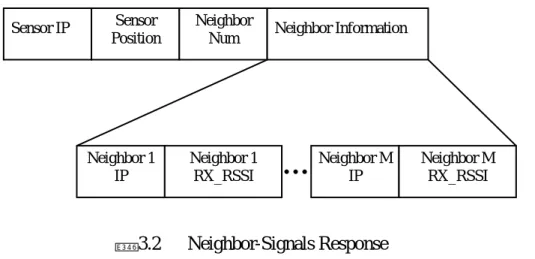
(29) 上的繞徑、省電及安全機制等。整個網路系統架構如圖 3.1。 Wireless Link. Fusion Center. Unknown Node Beacon Node. Observer. 圖 3.1. 3.1.2. Sensor Network Architecture. 系統運作流程 當系統中的感測器部署完成時,必須由資料收集中心啟動定位程式,首先, 資料收集中心會先向系統中的所有感測器發出 Neighbor-Probe Request,系統 中的感測器接收到 Neighbor-Probe Request 後,會主動向資料收集中心建立連 結,並告知資料收集中心有關位置及接收訊號大小的資訊 (Neighbor-Signals Response),其中 Neighbor-Signals Response 的格式如圖 3.2: Sensor IP. Sensor Position. Neighbor 1 IP. 圖 3.2. Neighbor Num. Neighbor 1 RX_RSSI. Neighbor Information. Neighbor M IP. Neighbor M RX_RSSI. Neighbor-Signals Response. 其中,Sensor IP 紀錄發出 Neighbor-Signals Response 的感測器的 IP,而. 20.
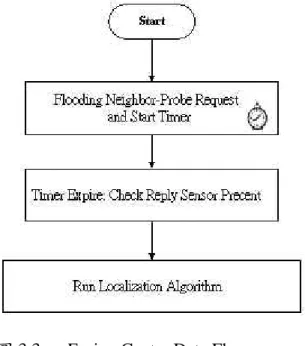
(30) Sensor Position 紀錄感測器的 x 座標值以及 y 座標值,若為 Unknown Node 則 此欄位為 NULL,Neighbor Num 紀錄此感測器有幾個 Neighbor,在這裡我們 所謂 Neighbor 的意思是指可以接收到訊號的感測器,而 Neighbor Information 則 紀 錄 了 所 有 可 接 收 到 訊 號 的 Neighbor 的 訊 號 , 共 有 M 筆 Neighbor Information,其中 M 由 Neighbor Num 決定,而 Neighbor Information 中則紀錄 了每個 Neighbor 的 IP 以及 Received RSSI 值。 如圖 3.3,當資料收集中心發出 Neighbor-Probe Request 之後,會啟動計時 器(Timer),等待一段時間間隔由感測器回應 Neighbor-Signals Response,當等 待的時間到期之後,資料收集中心會統計共有幾個感測器回應 Neighbor-Signals Response,開始執行定位演算法計算所有 Unknown Node 的位 置。. 圖 3.3. Fusion Center Data Flow. 而在此必須考慮感測器是否移動的問題,在我們系統架構中,只允許小部 分感測器的移動,若是大部分的網路拓樸皆改變時,則必須由資料收集中心重 新發出 Neighbor-Probe Request,然後重新執行演算法。當感測器移動時,會 接收到不一樣的 Neighbor RF 訊號,若是接收到的 Neighbor 訊號與之前完全不 同 , 我 們 稱 此 感 測 器 移 動 , 他 會 向 資 料 收 集 中 心 發 出 Neighbor-Signals Response,而資料收集中心收到之後,會執行定位演算法單獨找尋此點的位 置,然後將位置訊息回傳給此感測器,若在資料收集中心計算此感測器的位置 同時,另有一個感測器同時發出 Neighbor-Signals Response,則資料收集中心 會重新發出 Neighbor-Probe Request,重新執行所有感測器的定位程式。. 21.
(31) 3.2. 具調適能力的定位演算法 (Adaptive Localization Algorithm) 此演算法的基本假設在於部分的的感測器已經知道自己的位置,首先,除 了已知位置的 Beacon Node、尚未知道自己位置的 Unknown Node 外,我們稱 目前正在計算位置的 Unknown Node 為 Deal Node,而 Deal Node 附近所有 Beacon Node 個數的總和,我們稱之為此 Deal Node 的 Beacon Count,找到此 Deal Node 的估計位置後,此時系統會將它標示為 Calculated Node ,因此 Calculated Node 的位置為計算而來,而非事先知道位置的 Beacon Node。演算 法如下:. 圖 3.4 AdaptiveLocalization() Algorithm 如圖 3.4,AdaptiveLocalization()為系統定位演算法,在此函式裡,依照順 序 執 行 的 三 個 子 函 式 代 表 程 式 的 三 個 階 段 : CalLoc_MaxBeaconCountwithBound() 是第一個階段所要執行的函式,在這個 階段,程式只會在某個衰減範圍裡去尋找接收到最多 Beacon Node 訊號的 Unknown Node 來做定位,若找到 Unknown Node 的位置之後,則將此 Node 標示為 Calculated Node,再繼續尋找下一個符合條件的 Unknown Node,一直 到找不到 Unknown Node,或者找到的 Unknown Node 其接收到 Beacon Node 訊號的個數小於 3 個。由於衰減較小的 Beacon Node 對於 Unknown Node 來說,. 22.
(32) 相對地距離 Unknown Node 較近,彼此之間有障礙物的可能性較低,而且,距 離較近時,比較不會有 multipath 的問題,所以先由某個衰減範圍裡尋找到的 Beacon Node 來 定 位 , 會 有 較 好 的 精 確 度 。 CalLoc_MaxCalBeaconCountwithBound()為第二個階段執行的函式,在這個階 段,使用某個衰減範圍裡的 Beacon Node 以及 Calculated Node 當作參考點,再 尋找接收到最多參考點訊號的 Unknown Node 來做定位,同樣的,在找不到適 合的 Unknown Node 或者找到的 Unknown Node 的參考點個數小於 3 時便會進 入第三階段:CalLoc_MaxBeaconCountwithBound(),函式的行為類似於第二階 段,只是差別在此時無衰減範圍的限制,3 個階段代表逐漸放寬限制找尋合適 的參考點來定位,藉由參考點的選取來增進定位的精確度。. 圖 3.5 CalLoc_MaxBeaconCountwithBound ()Algorithm 如圖 3.5,在第一個階段裡,會先執行 FindMaxBeaconCountwithBound(), 如果能夠找到 Unknown Node 在某個衰減範圍裡有 3 個以上的 Beacon Node (因 為至少要大於 3 個以上,才能執行 Maximum Likelihood 演算法 ) ,就執行 AdaptiveFindLocation(),利用 Maximum Likelihood 方法找出此 Unknown Node 的估計位置,然後將它標示為 Beacon Node,然後再找下一個 Unknown Node, 直到在某個訊號範圍裡找不到 Unknown Node,或者找到的 Unknown Node 其 收到 Beacon Node 訊號的數目小於 3 個為止。而在第二、三個階段,所不同的 地方只是在於一開始找尋參考點時的條件不同而已。. 23.
(33) 不管是任一個階段,在找到可供定位的參考點之後(必須要 3 個以上的參考 點 ) ,程式會執行 AdaptiveFindLocation() 找尋此 Unknown Node 的位置, AdaptiveFindLocation()的演算法如下: AdaptiveFindLocation (DealNode) { vagueX, vagueY = FindLocation( DealNode ); for(int i=0; i < DealNode->BeaconCount ; i++){ AdaptiveDistanceEstimation(DealNode-> Beacon[i],DealNode,vagueX,vagueY); } MaximunLikelihood(DealNode); }. AdaptiveFindLocation 為我們修改過後的函數,它會先利用原先的方法 (使 用內定 n 與 X 的方法) 求出一個較不精確的位置 vagueX 與 vagueY,再代入 AdaptiveDistanceEstimation() 求出與所有鄰近 Beacon Node 的距離,最後使用 Maximum Likelihood 方法求出此 DealNode 的位置。在下節我們介紹我們動態 找尋測距係數估計距離的方式:AdaptiveDistanceEstimation():. 3.2.1. Adaptive Distance Estimation AdaptiveDistanceEstimation(SourceNode, DealNode, vagueX, vagueY){ n, X = FindParameter( SourceNode, DealNode, vagueX, vagueY ); Receive = RSSI(SourceNode, DealNode); return DistanceEstimation( receive, n, X ); }. 如上演算法,Deal Node 的訊號傳送端稱為 Source Node。函式的一開始會 先呼叫 FindParameter()找出相對於 Source Node 與 Deal Node 局部環境中合適 的測距係數,也就是 n 和 X,找出來之後再呼叫 RSSI(SourceNode, DealNode) 求得 Deal Node 接收 Source Node 的訊號大小後,我們便能夠代入 2.2.1.1 小 節公式(6)算出較精確的距離。我們的重點主要在於如何找出局部環境中的測 距係數,由 FindParameter()來找出,我們先說明如何找出局部環境中的測距係 數,再詳細介紹 FindParameter()如何實作: 如下圖 3.6,我們希望能夠更準確地計算出 Source Node 到 Deal Node 的距 離。首先我們必須找出 Source Node 相對於 Deal Node 的測距係數,我們在此 做了一個假設,我們假設 Deal Node 鄰近的 Beacon Nodes 具有與 Deal Node 相 同的局部環境,因為我們認為在 Deal Node 附近的 Beacon Node 對 Source Node 所發出的訊號來說有最近似的性質(相同的阻礙物,相同的房間,相同的溫溼. 24.
(34) 度…等等),所以由此方式回推求出的測距係數最能近似 Deal Node 的狀況。 因為這些 Deal Node 鄰近的 Beacon Nodes 座標皆已知,再加上我們亦知 Source Node 的座標值,所以可以求得這些 Beacon Nodes 與 Source Node 的距離,然 後代入代入公式(6),最後以線性回歸的方式,我們便可以求得測距係數。例 如圖 3.6,我們若能找到在 Deal Node 附近的兩個 Beacon Node B1 和 B2,我們 可以求出 Source Node 到 B1 和 B2 的距離 D1 和 D2,再合併 Source Node 到 B1 和 B2 的訊號衰減,代入公式(6)即可回推求出公式(6)的 N 與 X (二元一次 聯立方程式),若可找到更多的 Beacon Node,則可利用線性回歸的方式求出一 個較適合的測距係數。. Source Node B1. Deal Node. B2. Neighbor Beacon Node. D1 D2. 圖 3.6. Deal Node 的局部環境. 然而,要如何找到 Deal Node 附近的 Beacon Node 呢?我們以下面兩個方 法找到 Deal Node 附近的 Beacon Node:. 1.. Deal Node 訊號範圍裡訊號衰減最小的幾個 Beacon Node 為最接近 Deal Node 的 Beacon Nodes:如圖 3.7,若 Deal Node 可以收到 Beacon Node B1、B2、B3 的訊號,則在一般狀況下,Deal Node 可以收到 B1 的訊號,且訊號是所有收到的訊號中最強的,所以,我們選擇 Deal Node 訊號範圍裡訊號衰減最小的幾個 Beacon Node 為最接近 Deal Node 的 Beacon Nodes 這個假設是合理的。如圖 3.7,理想的狀況下 B1 會是接收 Deal Node 訊號衰減最小的 Beacon Node。. 25.
(35) B3. Deal Node Neighbor Beacon Node. B1. B2. 圖 3.7. 2.. Deal Node 訊號範圍. 先利用預設的訊號衰減公式求出”近似的位置”,利用這個近似的位置 可以我們找到 Source Node 相對於 Deal Node 的方向,再加上角度 θ 的 限制後我們可以找到一個範圍。如圖 3.8,Beacon Node B1、B2 為屬 於 Deal Node 這個範圍的 Beacon Node。. Source Node Deal Node Neighbor Beacon Node. θ. B2. θ. B1. SN. Calculated position (Use default parameter). B3. 圖 3.8. Deal Node 估計位置. 我們由上述兩種方法可找出接近 Deal Node 的 Beacon Node,再由這些 Beacon Node 求出測距係數,詳細的演算法如下:. 26.
(36) 圖 3.9. FindParameter() Algorithm. 如圖 3.9,FindParameter()這個函式一共有四個參數,參數 Source 代表 Source Node,參數 Deal 代表 Deal Node,參數 vagueX 和參數 vagueY 則是利用傳統 方法求出的 Deal Node 座標值。這個函式是求得 Source Node 相對於 Deal Node 的測距係數。函式在一開始會先呼叫 InSNRangeB()檢查是否在 Source Node. 27.
(37) 範圍裡的 Beacon Node 個數是否大於或等於 2,因為至少要找到兩個以上的 Beacon Node 才能夠以線性回歸法回推求出測距係數,如果有超過兩個以上, 則呼叫下個函數:InDNRangeBwithDecayB(),這個函數是尋找同時在 Source Node 以及 Deal Node 訊號範圍的 Beacon Node,且 Deal Node 對這些 Beacon Node 的訊號衰減不能超過某個 Threshold,如圖 3.10 (Case1),我們會在圖 3.7 裡 的 斜 線 部 分 選 取 , 若 有 超 過 兩 個 以 上 的 Beacon Node , 則 呼 叫 RegressionFindParameter() 使用線性回歸法回推出測距係數,若沒有則呼叫 InDNRangeDirectionB(),這個函數則是尋找同時在 Source Node 以及 Deal Node 訊號範圍的 Beacon Node,且必須是在往 Deal Node 的方向上(可由 Source Node 的位置及 Deal Node 的粗估位置求得),如圖 3.11 (Case2),對. InDNRangeDirectionB()函數來說我們也可以縮小角度,取角度 θ 的範圍,以 更嚴格的限制找到合適的 Beacon Node。若在這個函數裡也找不到兩個以上 的 Beacon Node,才會呼叫 InDNDirectionB(),尋找在 Source Node 範圍且屬 於 Deal Node 方向上的 Beacon Node,,如圖 3.12 (Case3)。我們由以下的圖 示可以知道,我們是逐漸擴大範圍尋找合適的 BeaconNode 來求得測距係數: Case1: 在 Deal Node 範圍 & Decay < Decay_Bound 的 Beacon Node >=2, 斜線部分為選取範圍. 小圓為 Decay < Decay_Bound SN. DN. 圖 3.10 Case1: 在 Deal Node 範圍 & Decay < Decay_Bound. Case2: 在 Deal Node 範圍且 Deal Node 方向上的 Beacon Node>=2, 斜線為選取範圍. 小圓為 Decay < Decay_Bound SN. DN 夾角< θ. 圖 3.11. Case2: 在 Deal Node 範圍 & Deal Node 方向. 28.
(38) Case3: 在 Deal Node 方向上的 Beacon Node >= 2,斜線部分為選取範圍. 小圓為 Decay < Decay_Bound SN. DN. 圖 3.12 Case3: 在 Deal Node 的方向上 由演算法及圖示我們可以得知,我們會先尋找在 Deal Node 附近的 Beacon Node,若找尋不到,才逐漸擴大範圍尋找 Beacon Node,有了這些 Beacon Node 的位置後,我們可以求得與 Source Node 的距離,再利用這些距離與 Source Node 到這些 Beacon Node 的訊號衰減透過線性回歸的方式回推求出測距係數. N 與 X。所以,我們至少要找到符合條件的兩個 Beacon Nodes,才能以線性 回歸的方式求得 N 與 X,再用這個新的 N 與 X 代入訊號衰減公式(6)求得 DN 的位置。到此我們介紹完我們的如何找尋測距係數的演算法概念,由於測距 係數可依據局部的環境調整,所以我們稱此為具調適能力的定位演算法。. 3.2.2. Adaptive Location Estimation 在 前 節 我 們 提 到 在 求 得 與 各 Beacon Node 的 距 離 後 , 我 們 會 呼 叫 MaximunLikelihood() 這 個 函 式 ; 我 們 在 第 二 章 介 紹 過 Maximum Likelihood Method,不過第二章是針對 ultrasound method 的導證,在這一節裡我們將修改 第二章所導證的公式以符合 Signal Propagation Model。同樣的,如公式(11), x0 與 y 0 為 Unknown Node 的二維座標,xi 與 yi 為第 i 個 Beacon Node 的二維座標, i=1,2,3...k,我們將 s × t i 0 改成兩點所估算的距離 Di , Di 意指 Unknown node 與 第 i 個鄰近的 Beacon Node 所估算出的距離。理想狀態下,我們可以得到(11) 式,將(11)式平方後移位我們可以得到(12)式,i=1,2,3...k,共有 k 個方程式。 同樣地,為了化成 Y = bX 的矩陣形式以求得回歸係數,所以我們需要消去(12) 式中的 ( X 0 + Y0 ) 項,我們將 1~k-1 個方程式皆與第 k 個方程式相減,得到(13) 2. 2. 式: Di = ( xi − x0 ) 2 + ( y i − y 0 ) 2. (11). − xi − y i = ( x0 + y 0 ) + x0 (−2 xi ) + y 0 (−2 y i ) − Di 2. 2. 2. 2. 29. 2. (12).
(39) − xi − y i + x k + y k = 2 x 0 ( x k − xi ) + 2 y 0 ( y k − y i ) + Dk − Di 2. 2. 2. 2. 2. 2. (13). 公 式 (13) 符 合 矩 陣 Y = bX 的 形 式 所 以 可 帶 入 矩 陣 回 歸 係 數 公 式. b = ( X T X ) −1 X T Y 以求得矩陣回歸係數,其中: 2(Yk − Y1 ) ⎤ ⎡ 2( X k − X 1 ) ⎢ 2( X − X ) 2(Yk − Y2 ) ⎥⎥ k 2 ⎢ X = ⎢ ⎥ M M ⎢ ⎥ ⎢⎣2( X k − X ( k −1) ) 2(Yk − Y( k −1) )⎥⎦ 2 2 2 2 2 2 ⎡ ⎤ − x1 − y1 + x k + y k + D1 − Dk ⎢ ⎥ 2 2 2 2 2 2 − x 2 − y 2 + x k + y k + D2 − Dk ⎢ ⎥ 以及 b = ⎡ x0 ⎤ Y= ⎢y ⎥ ⎢ ⎥ M ⎣ 0⎦ ⎢ 2 2 2 2 2 2⎥ − − + + + − x y x y D D ⎢⎣ ( k −1) ( k −1) ( k −1) k k k ⎥ ⎦. 所以,只要 Unknown Node 能夠接收到 3 個以上 Beacon Node 所發出的訊 號,便能依照 Adaptive Distance Estimation Method 求得精確的間距,再依照 Beacon Nodes 的位置與間距,代入 Maximum Likelihood Method for Signal Propagation Model 求出回歸係數,也就是 Unknown Node 的位置,到此我們完 全介紹了整個演算法的運作方式,在下一節裡,我們會對我們的演算法做一個 分析與討論。. 3.2.3. Algorithm Discussion 在分析我們的演算法時我們發現此演算若在一開始 Beacon Node 不夠多的 時候,會找不到適合的 Beacon Node 來判別測距係數,而使用 Default 的測距 係數 n 和 X。由於我們 Default 的測距係數是在沒有障礙物的狀況下由當時環 境所測量的數據以線性回歸的方式求得,所以,若訊號傳送端與接收端在障礙 物的兩端,則會發生誤判的狀況,為了改進這個缺點,我們希望一開始執行演 算法時,只考慮訊號衰減小於一個範圍的狀況,如圖 3.13:. 30.
(40) Deal Node B4. Neighbor Beacon Node B5. B1 B3. Propagation Loss < Decay_Bound. B2. 圖 3.13 Deal Node 訊號範圍<Decay_Bound 如圖 3.13,Beacon Node B1~B5 皆屬於 Deal Node 的訊號範圍裡,但我們希 望在一開始並不考慮 B4 以及 B5,因為訊號衰減過多,有可能是障礙物所造成 也有可能是因為距離較長,因為在一開始 Beacon Node 並不是很多的情況下, 通常找不到足夠的 Beacon Node 來判別測距係數。所以我們希望一開始不考慮 B4 或 B5,以免發生測距係數誤判的狀況,才會在 AdaptiveLocalization()裡一 開 始 先 呼 叫 FindMaxBeaconCountwithBound() , 希 望 在 某 個 訊 號 範 圍 (Decay_Bound)內先尋找 Beacon Node,可以避免使用訊號衰減過大的 Beacon Node 來定位,如果在 Decay_Bound 裡已經找不到三個以上的 Beacon Node 來 做定位,再擴大範圍,尋找所有訊號範圍裡的 Beacon Node 來做定位,此時, 圖 3.13 中的 B4 以及 B5 便會考慮進去。. 31.
(41) Adaptive Localization Algorithm 模擬分析. 第四章 4.1. NCTUns Network Simulator. 4.1.1. 使用動機 如前所述,無線感測網路是由大量且微小的感測器所組成,因為我們沒有 足夠的硬體設備可供實作,所以我們嘗試在電腦上模擬無線網路的環境,並在 此模擬的環境上驗證我們所提出的演算法,我們的動機是希望能夠模擬出無線 感測網路環境,以及包含於其上大量的感測器以及障礙物等環境、除此之外, 我們也希望模擬出無線模組的訊號強度,以及訊號經過障礙物衰減的行為。如 此我們能夠專心地面對定位演算法的問題,使用模擬的方法可使我們暫時不用 面對諸如在 ad-hoc 無線網路上繞徑的問題。. 4.1.2. 網路模擬器比較 目前常用的網路模擬器如下表: NS2. NCTUns. OPNET. 作業平台. UNIX/WINDOWS. FreeBSD. UNIX/WINDOWS. 費用. 否. 否. 是. 介面. 圖形/文字. 圖形/文字. 圖形. Physical. Shadowing model. Two-ray ground model. Model. Two-ray ground model. Two-ray ground model. Free Space model. Free Space model. Free Space model 表 4.1. Well-known network simulator. 以上三種 Simulation tool 皆沒有支援障礙物的 Modeling, NCTUns[14]雖然 可以加入障礙物,但若有障礙物的阻礙,則若訊號透過障礙物,模擬的訊號強 度則為 0,不符合我們的需要, NS2 則無法加入障礙物,因此若要是合於我 們的模擬,則必須修改 Source Code,而 NS2 的系統架構較為複雜,使用不易, 且沒有整合的介面,所以 NCTUns 比較起來似乎是一個比較好的選擇。在上述 的網路模擬器中,我們選擇了 NCTUns 做為我們模擬網路環境的模擬器,以下 列出我們選擇 NCTUns 作為我們的模擬環境的原因: z. NCTUns 具有完全整合的圖形使用者介面,但 NS2 卻需要撰寫 otcl script. 32.
(42) 來建立網路拓樸,比較起來 NCTUns 較為簡單易學。 z. 一般的 TCP/IP 網路程式可以在 NCTUns 執行,這使得我們日後實做時 可以重複使用所撰寫的程式碼。. z. 因為我們需要修改實體層以模擬出訊號經過牆壁後衰減的情況,而 NCTUns 使用物件導向式的寫法,修改起來較為容易。. 基於以上原因,我們選擇了 NCTUns 作為我們的模擬工具,我們修改 NCTUns 所模擬的 Physical Layer,並使用 Attenuation Factor Model 來模擬訊號 經過牆壁後衰減的情況,有關 Attenuation Factor Model 的討論請見公式(4)(5)。. 4.2. 網路模型假設 我們希望能夠判斷出我們的定位程式對於障礙物的影響,所以我們選擇了 一個室內的模擬環境,長 1500 公尺,寬 1500 公尺,如圖 4.1,其中房間與房 間之間的牆壁便是障礙物,我們可從此情境來探討定位程式對障礙物的影響。. 圖 4.1 模擬環境. 33.
(43) 4.2.1. 網路拓樸 由以上的情境我們可以了解到,若是使用隨機的網路拓樸,會造成很多獨 立的感測器或一群無法連結到 Fusion Center 的感測器,所以我們的網路拓樸 不能完全是隨機產生的,感測器必須能夠透過相連的感測器連結到 Fusion Center,因此彼此之間不能距離太大,我們由以下方法來設計我們的網路拓樸:. R1. R2. Fusion Center L. R3. Sensor. Sensor Sensor L. Sensor. L. Sensor L Sensor. 圖 4.2 模擬網路拓樸 如圖 4.2,我們將 Fusion Center 安排在座標的起點位置,再以座標起點為 圓心,每隔 L 畫出一個個的同心圓,我們將感測器安排每個同心圓的圓周上。 L 為一個固定的值,其大小不能超過有效通訊範圍大小的 0.8 倍,否則會造成 感測網路無法連結,R1~Rn 為一個隨機產生的 random number,大小不能超過 0.5 倍 L,如此我們可以確保此感測網路為連結的狀態,而此網路架構也保有 一定的隨機性。. 4.2.2. 模擬架構 除了網路拓樸之外,我們尚需要決定無線網路的訊號衰減模型 (Signal Propagation Model),我們使用第二章所介紹到的衰減因子模型,如公式(5), 在我們模擬情境唯一的障礙物即是牆壁,所以並不用考慮樓層的影響,所以去 掉 FAF 之後如公式(14):. 34.
(44) PL(d )[dB] = PL(d 0 )[dB] + 10 N sf Log (. d ) + ∑ WAF [dB] d0. (14). 其中 WAF 為 Wall Attenuation Factor,N sf 為 single floor path loss exponent, 參考 2.2.1.1 節中表 2.1 及 2.2,我們設定 WAF = 8,以及 N sf = 2。. 有關於 Neighbor Signal Strength 的取得方面,在 IEEE 802.11 標準裡是由某 個 Node 發出探測請求(Probe Request),當此 Node 的 Neighbor 接收到 Probe Request 之後,會回傳探測回應 (Probe Response) ,而將此訊息紀錄在 Scan Report,當 Scan Report 裡的紀錄過期之後,系統會將此筆紀錄刪除[12]。由於 NCTUns 並沒有模擬在 ad hoc 環境下取得訊號強度的介面,因此我們是透過修 改模擬的 ARP Protocol Model,每隔 1 秒鐘便使 ARP Protocol Model 發出一個. ARP Request,以及修改 Physical Model,在得到訊號時便將訊號大小的同時, 便將訊號大小紀錄在一個紀錄檔,因此我們只要讀取到紀錄檔,便可以得知目 前的訊號大小,我們設定訊號紀錄檔過期的期限是 3 秒鐘,我們每隔 3 秒鐘便 會開啟訊號紀錄檔,將過期的訊號紀錄刪除。. 另外有關 Sensor Network 的繞徑方面,我們使用 NCTUns 上的 DSDV (Destination Sequenced Distance Vector Routing Protocol)Routing Model 來模擬 我們的繞徑,DSDV 為 Ad-hoc Network 的繞徑協定,而 Sensor Network 的網 路架構類似於 Ad-hoc Network,所以亦適用 DSDV Protocol。. 除此之外,還有兩個分別在 Fusion Center 以及 Sensor Node 執行的程式, 在 Sensor Node 上的程式負責將 Sensor Node 所得到的訊號大小資訊傳給. Fusion Center,而 Fusion Center 在獲得 Sensor Node 的訊息資訊之後,將會執 行 Adaptive Localization Algorithm,將所有 Node 的位置依我們的演算法計算 出來,然後將位置資訊傳回給 Sensor Node。而我們也實做了依傳統固定測距 係數方式的演算法,做為 Adaptive Localization Algorithm 的對照組,我們會比 較兩個演算法在相同的 Sensor Node 個數,以及不同 Beacon Node 百分比之下 的誤差,還有不同 Sensor Node 個數下要達到某一個精確度所需要的 Beacon Node 百分比。在 Fusion Center 所執行的程式裡,需要設定某些參數,例如 Decay_Bound 為 Source Node 在尋找屬於 Deal Node 某個衰減範圍裡的 Beacon Node 所需要用到的參數,而 MAX_ANGLE 則為在尋找 Deal Node 方向上的. 35.
數據
![表 2.1 Path Loss Exponent for Different Environment , from [6]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8467247.183393/18.892.136.781.513.928/表-path-loss-exponent-different-environment.webp)
+7

![圖 2.7 Connectivity-Based Localization 由圖中可知, d R 越大,可以得到越精確的位置。但實際上我們由以上的假 設可知,若訊號的衰減受到其他因素影響,例如障礙物,則容易影響定位的精 確度,再者,每個感測器經過長時間的運作後,傳送的訊號強度也會受有限的 電源所影響,進而影響定位的準確度。總而言之,這個系統在戶外的環境中會 有較好的定位效果,因為訊號較不易受其他因素影響。而且 d R 越大,越能得 到精密的定位,詳細說明請參照[10]。](https://thumb-ap.123doks.com/thumbv2/9libinfo/8467247.183393/25.892.287.647.536.717/由以上運作送的訊號強度也會受有限的電源所影響進而影響定準確.webp)
相關文件
• 買股票是要買該股票「未來的配息」,所 以應該應用未來的EPS的資訊來估計股
密碼系統中,通常將想要保護的密碼訊息稱為 plain text。而將經過加密後產生的加密訊息稱為 cipher text。在這 中間的過程,會用到可以對外供應的 Public Key 以及私人保
W ing )教授在美國電腦權 威期刊《 C ommunications of the
本論文之目的,便是以 The Up-to-date Patterns Mining 演算法為基礎以及導 入 WDPA 演算法的平行分散技術,藉由 WDPA
由於資料探勘 Apriori 演算法具有探勘資訊關聯性之特性,因此文具申請資 訊分析系統將所有文具申請之歷史資訊載入系統,利用
介面最佳化之資料探勘模組是利用 Apriori 演算法探勘出操作者操作介面之 關聯式法則,而後以法則的型態儲存於介面最佳化知識庫中。當有
本章將對 WDPA 演算法進行實驗與結果分析,藉由改變實驗的支持度或資料 量來驗證我們所提出演算法的效率。實驗資料是以 IBM synthetic data generator
接下來的 FDTD 疊代運算將是整個計算的核心,也是運算量最大 的部分,在這中間,如何利用光波導的性質以及傳播常數等特徵參量
