國
立
交
通
大
學
工學院精密與自動化工程學程
碩士論文
使用壓縮空氣噴流分離矽晶片研究
A study of using compressed air jet for
silicon wafer separating
研 究 生:涂材宏
指導教授:徐瑞坤 教授
使用壓縮空氣噴流分離矽晶片研究
A study of using compressed air jet for
silicon wafer separating
研 究 生:涂材宏 Student:Tu-Tsai Hung 指導教授:徐瑞坤 Advisor:Ray-Quen Hsu
國 立 交 通 大 學
工學院精密與自動化工程學程
碩 士 論 文
A ThesisSubmitted to Degree Program of Automation and Precision Engineering College of Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master of Science
In
Automation and Precision Engineering July 2012
使用壓縮空氣噴流分離矽晶片研究 研究生:涂材宏 指導教授:徐瑞坤教授 國立交通大學工學院精密與自動化工程學程 摘 要 在太陽能矽晶片的生產過程中,必須將細薄而且互相黏附的半成 品分離取出,為了避免硬脆的矽晶片破裂,使用噴流吹入矽晶片之間 的縫隙將其吹離,再搭配取放機構將矽晶片取走。 目前產業界評估、設計此裝置仍然使用試誤法,並沒有定義一套 可考靠性較高的設計法則,品質不足以讓人信賴,本文以數值模擬搭 配實驗方法建立可靠的設計法則。 實驗的流程可概分為三個階段,第一階段定義實驗參數做為控制 變因,在此架構下建立模型與參數的相關性;第二階段使用數值模擬 對流場做初步的驗證,並且將不適用的參數排除;第三階段將上述兩 階段的結果整合,進行一系列的實驗。 研究的結果顯示,流場模擬可以預測吹離矽晶片於穩態時流場的 紊流特性,而實驗結果可發現,若是需要快速的分離矽晶片,應該 使用較少的噴嘴數量,但是在生產更薄的產品時,噴流的應力將造 成晶片破裂,必須增加噴嘴數量以及角度著手,在生產更大尺寸晶 片時,考量的是振動產生破裂,加速度成為關鍵的測量值,將噴嘴 與晶片成 65 度角並且為雙對噴嘴,流體壓力設定為 3.5kg/cm2表現 為最佳。
A study of using compressed air jet for silicon wafer separating
Student:TU-TSAI HUNG Advisor:Dr. Ray-Quen Hsu
Degree program of Automation and Precision Engineering College of Engineering
National Chiao Tung University
ABSTRACT
During the production process for solar energy silicon chips, thin and sticking semi-finished products must be separated and extracted. To prevent the brittle silicon chips from rupturing, a jet stream is blown into the gaps between the chips to keep them separated, and a fetching structure is used to move or remove the silicon chips.
Current industry assessments and designs for this device remain based on the trial-and-error method. No reliable design rules have been defined and the quality of the products is not dependable. For this study, we employed numerical simulation with experimental methods to establish reliable design rules.
The experimental process can be divided into three stages. In the first stage, the experimental parameters were defined as control variables and the correlation between the model and the parameters under this framework was established. In the second stage, the researcher used the numerical simulation to conduct preliminary validation of the flow field and eliminate the inappropriate parameters. In the third stage, the results of the first two stages were combined and used to conduct a series of experiments.
The results of this study indicated that the flow field simulation can predict the turbulence characteristics of a silicon chip blowing operation for a steady-state flow field. The experiment results show that fewer nozzles should be used for rapid separation of the silicon chips. However, the jet stress would rupture thinner chips. Therefore, additional nozzles should be used to produce thinner chips. Vibration rupture should be considered during large size silicon chip production. Acceleration is the
誌 謝 首先要真心感謝指導教授 徐瑞坤老師,細心的教導與不時的指 導我研究的方向,在我研究過程遇到盲點時,總能適時的引導我走回 正軌,使我在學期間獲益良多。一日為師、終生為父,老師對學問的 嚴謹永遠是我學習的典範。 在流場模擬的軟體使用上,感謝蔡毓斌學長以及敏彰同學提供 的協助,讓我能找到使用軟體的切入點。另外也感謝提供各式各樣的 感測器讓我做測試的,小賴以及提供各總實驗材料的呂老闆,讓我在 實驗過程的物料來源不虞匱乏。 也感謝在學期間以下同學的幫忙,炳煌、紹華、建昌、冠諭, 你們所提供的各總學習資訊以及物資,讓我能更便捷的完成學業事 項,也省去不少的麻煩。 最後最重要的,感謝我所有的家人,感謝你們對我的付出,讓 我在求學的路上順利沒有牽掛,謝謝你們。
目錄 頁次 誌 謝...III 目錄... IV 表目錄... VII 圖目錄...VIII 第一章 序論...1 1-1 前言...1 1-2 研究動機與目的...2 第二章、文獻回顧 ...5 2-1 產業現況以及製造流程...5 2-2 分片裝置原理以及架構介紹...11 2-3 CFD 原理介紹 ...22 2-4 FLUENT軟體簡介 ...27 2-5 矽晶片材料性質回顧...31 第三章 研究內容與方法 ...32
3-2-1 基本假設條件 ...34 3-2-2 邊界條件設定 ...35 3-2-3 參數設定以及模型選用 ...36 3-3 模型以及網格建立...46 3-4 FLUENT 軟體模擬 ...50 3-4-1 流場模擬結果 ...52 3-5 實驗方法與過程...60 3-5-1 變形量研究 ...63 3-5-2 加速度的研究 ...67 3-5-3 多晶矽材料試驗 ...69 第四章 實驗結果與討論 ...72 4-1 變形量結果討論 ...72 4-2 加速度測量結果討論 ...80 4-3 噴流分離高度與速度討論 ...91 4-4 材料試驗結果探討 ...93 4-5 各個模型共同比對 ...95 第五章 結論...98 5-1 結論...98
5-2 未來展望 ...99 參考文獻...100
表目錄 第二章 表 2.1 矽晶型太陽能轉換率...6 表 2.2 流量計使用規格表...17 第三章 表 3. 1 參數表格...37 表 3. 2 感測器規格...64 第四章 表 4. 1 測量結果-1...89 表 4. 2 測量結果-2...90 表 4. 3 矽晶片材料試驗表...93 表 4. 4 分離高度優劣排列...97 表 4. 5 變形量優劣排列...97 表 4. 6 最大加速度優劣排列...97
圖目錄 頁次 第二章 圖 2.1 中游產業製造流程圖... 8 圖 2.2 太陽能矽晶片外型尺寸... 12 圖 2.3 晶片承載裝置... 13 圖 2.4 伺服升降裝置... 14 圖 2.5 氣流噴嘴尺寸... 15 圖 2.6 雷射光電感測器... 16 圖 2.7 真空吸盤... 17 圖 2.8 流量感測器... 17 圖 2.9 氣壓系統圖... 18 圖 2.10 動作流程說明-1 ... 19 圖 2.11 動作流程說明-2 ... 20 圖 2.12 動作流程說明-3 ... 20 圖 2.13 動作流程說明-4 ... 21 圖 2.14 SIMPLE 壓力求解速度流程圖 ... 26 圖 2.15 Fluent 使用二維網格 ... 30 圖 2.16 Fluent 使用三維網格 ... 30
第三章 圖 3.1 研究流程以及工作內容... 33 圖 3.2 雷諾數計算管徑說明圖... 35 圖 3.3 模擬架構式意圖... 36 圖 3.4 晶片承載裝置機構尺寸圖-上視圖 ... 38 圖 3.5 噴嘴裝置到晶片距離-上視圖 ... 39 圖 3.6 噴嘴位置尺寸圖... 40 圖 3.7 噴嘴裝置尺寸圖-側視圖 ... 41 圖 3.8 噴嘴裝置尺寸圖-前視圖 ... 41 圖 3.9 單對噴嘴上視圖... 43 圖 3.10 雙對噴嘴上視圖 ... 44 圖 3.11 雙對角度噴嘴上視圖 ... 45 圖 3.12 Gambit 使用介面 ... 46 圖 3.13 單對噴嘴模型... 47 圖 3.14 單對噴嘴網格... 48 圖 3.15 邊界條件操作介面... 49 圖 3.16 精度等級選擇操作畫面... 51 圖 3.17 網格體積檢查... 51 圖 3.18 Velocity inlet 網格位置檢查 ... 52 圖 3.19 Outflow 網格位置檢查 ... 52
圖 3.20 Wall 網格位置檢查... 52 圖 3.21 單對噴嘴疊代圖 ... 54 圖 3.22 單對噴嘴紊流強度等角視圖... 54 圖 3.23 單對噴嘴紊流強度與位置關係圖... 55 圖 3.24 雙對噴嘴疊代圖 ... 55 圖 3.25 雙對噴嘴紊流強度等角視圖... 56 圖 3.26 雙對噴嘴紊流強度與位置關係圖... 56 圖 3.27 雙對 55 度噴嘴疊代圖 ... 57 圖 3.28 雙對 55 度噴嘴紊流強度等角視圖 ... 57 圖 3.29 雙對 55 度紊流強度與位置關係圖 ... 58 圖 3.30 雙對 65 度噴嘴疊代圖 ... 58 圖 3.31 雙對 65 度噴嘴紊流強度等角視圖 ... 59 圖 3.32 雙對 65 度紊流強度與位置關係圖 ... 59 圖 3.33 單對噴嘴實驗照片 ... 60 圖 3.34 雙對噴嘴實驗照片 ... 61 圖 3.35 雙對角度噴嘴實驗照片 ... 61 圖 3.36 噴嘴實物照片 ... 62 圖 3.37 矽晶片劃分九等分位置 ... 62
圖 3.39 高度與變形量計算方式圖示... 65 圖 3.40 測量組別說明 ... 65 圖 3.41 實驗過程照片-1... 66 圖 3.42 實驗過程照片-2... 66 圖 3.43 感測器使用原理 ... 67 圖 3.44 感測器部位功能明 ... 68 圖 3.45 加速度實驗過程照片 ... 69 圖 3.46 材料試驗說明圖 ... 70 圖 3.47 推力計照片 ... 71
第四章 圖 4. 1 單對噴嘴變形量(流體壓力 3.5kg/cm2 ) ... 73 圖 4. 2 雙對噴嘴變形量(流體壓力 3.5kg/cm2 ) ... 74 圖 4. 3 雙對 65 度噴嘴變形量(流體壓力 3.5kg/cm2 ) ... 74 圖 4. 4 單對噴嘴變形量(流體壓力 5kg/cm2 )... 75 圖 4. 5 雙對噴嘴變形量(流體壓力 5kg/cm2 )... 75 圖 4. 6 雙對 65 度噴嘴變形量(流體壓力 5kg/cm2 ) ... 76 圖 4. 7 流體壓力 3.5kg/cm2 變形量比較表 ... 77 圖 4. 8 流體壓力 5kg/cm2 變形量比較表 ... 78 圖 4. 9 不同流體壓力變形量比較表... 79 圖 4. 10 單對噴嘴加速度(流體壓力 3.5kg/cm2 ) ... 81 圖 4. 11 雙對噴嘴加速度(流體壓力 3.5kg/cm2 ) ... 81 圖 4. 12 雙對角度噴嘴加速度(流體壓力 3.5kg/cm2 ) ... 82 圖 4. 13 雙對角度噴嘴最大加速度(流體壓力 3.5kg/cm2 ) ... 82 圖 4. 14 雙對角度噴嘴平均加速度(流體壓力 3.5kg/cm2 ) ... 83 圖 4. 15 雙對角度噴嘴最大振幅(流體壓力 3.5kg/cm2 ) ... 83 圖 4. 16 單對噴嘴加速度(流體壓力 5kg/cm2 ) ... 84 圖 4. 17 雙對噴嘴加速度(流體壓力 5kg/cm2 ) ... 84
圖 4. 20 雙對角度噴嘴平均加速度(流體壓力 5kg/cm2)... 86 圖 4. 21 雙對角度噴嘴最大振幅(流體壓力 5kg/cm2)... 86 圖 4. 22 最大加速度比較表 ... 87 圖 4. 23 平均加速度比較表 ... 87 圖 4. 24 最大振幅比較表 ... 88 圖 4. 25 噴流分離高度與時間之關係圖... 92 圖 4. 26 負載與形變關係圖 ... 94 圖 4. 27 噴嘴變形量與材料試驗破壞變形量關係圖... 94 圖 4. 28 綜合性能比對四象限圖... 96 圖 4. 29 綜合模型性能比對雷達圖... 96
第一章 序論
1-1 前言 隨著科技進步發展,人類對能源的依賴日益加深,一個國家的開 發程度更可以使用能源消耗量表示,因此對能源的需求只會更加的擴 大,人類使用科學的方法轉換存在地球的能源,然而這些能源會有殆 盡的一天,而且使用能源的過程將產生二氧化碳、溫室效性,產生各 總破壞環境的連鎖反應。因此須多國家在近年來開始重視環境的保 護,並且建立法律制度,以各總獎勵或是處罰的條款來維護環保措施。 太陽能是一種轉換能量的光電元件,它是經由太陽照射後,把光 的能量轉為電能,它是利用半導體產生 PN 接合來獲得電位,當太陽 光照射時,光子的能量被移轉到半導體的電子,使它脫離軌道產生大 量的自由電子,電子移動產生了電位差,如果用導線將負載連接起 來,型成一個迴路,就會有電流通過負載,而產生電力。使用太陽能 是最環保的發電方式,發電過程中不會造成污染,不會產生二氧化碳 排放以及廢棄物。1-2 研究動機與目的 太陽能晶片是由矽為基本材料,將矽晶圓棒切割成薄片,為了有 效運用材料,將盡可能的把晶柱切割到最細薄並且在表面做許多製程 而產生的產品。 薄且容易脆裂的晶片仍然必須以快速的自動化進行生產,這乃是 工業生產技術的考驗,在各個製程皆需要取片以及放片的動作,如何 能將堆疊的晶片快速的分離以供給機器手臂取片,則是本論文所要探 討研究的。 使用噴嘴將矽晶片分離可以使用最少的物體接觸將晶片分離,此 方法在業界廣為使用,使用壓縮氣體經由氣嘴產生風刀狀的流場,噴 嘴氣流反覆吹氣,將堆疊且黏附的矽晶片藉由壓縮空氣的切入而分 離。氣嘴的設計由各太陽能設備廠家自行研發而成,但是研發過程並 沒有經過可告的設計法則。各個廠家因為急於投入生產製造,只能將 分片裝置調整成可用的狀態,並無法達到最佳的狀態。 太陽能晶片的優勢在於有效的運用能源,但是在生產的過程中, 也消耗掉大量的資源,透過模擬分析的方法,將設計結構改善,在經 過實驗步驟調整氣壓以及流量,使用最少的壓縮空氣將分離效果達到 最佳值。 在電腦科技未普及的從前,新產品的開發必須依照傳統的作業流
程,必須經過串聯方式的作業流程,必須將物件製做成實體後,在經 由實驗分析階段,將結果得出之後在判斷此方案是否可行,若是方案 成果是失效的,那麼就必須檢討失效原因,訂定新的解決方案,重新 由研發階段設計新的方案,再重複一次上述的作業流程。 目前電腦科技的進步,工程研發在電腦輔助分析(CAE)軟體的 運用愈來愈普遍,經過軟體的輔助分析,可以直接模擬實際的使用效 能,大幅提升產品的開發速度,雖然輔助分析軟體與實體運作狀況仍 然有落差,但是在工程研發階段可以解決部分的問題,其餘的部分需 等到製造過程以及實驗階段才能依序的發現問題,待驗證測試後,必 需擬定更接近目標的解決方案,再依序由製造以及實驗的流程驗證可 行性,在這個冗長的研究開發流程,必須要有電腦分析軟體從中輔 助,方可縮短研究開發時程。 目前使用氣嘴的分片方式最為業界所採用,此方法是因為最少接 觸晶片的方式分離而獲得大量的應用,使用氣流分離的方式仍然有幾 項問題需要解決: 將氣流調整為大流量時,可以快速的將晶片分離,但是紊流 的產生不穩定的狀態,造成晶片分離後的振動,當振動產生的 力量超過晶片的負荷時,將會產生破裂。
晶片吹離可以從一次就吹離到三次才吹離的機率分佈,考慮 到工業生產必須以最穩定的方式生產,因此最少必須經過噴 嘴三次的吹離,才會將晶片取出。 晶片載具的設計:載具不但要有易於搬運以及存放的功能,並 且節省空間可被堆疊,並且要能夠配合噴流分片裝置的動 作,在各方面功能的考量之下做個別功能的評比而選定最實 用的形式。 在矽晶片未來的發展上,仍然以更大面積批次生產的方式演進, 目前的主流是約當 6 吋的太陽能晶片為主流,未來將未朝向 8 吋以及 10 吋更大的尺寸發展,另外,為了更有效的運用矽晶片的產量,將 矽晶片切削為更薄的形式,如此一來,同樣長度的矽晶柱材料,將能 夠生產出更多的太陽能晶片。未來高速生產的發展勢必會加以演進, 因此目前的製程處理速度將會受到挑戰,因此本論文對矽晶片未來發 展的方向做規劃,將更大面積尺寸,更薄的厚度,以及更快的生產速 度做研究以及探討。
第二章、文獻回顧
2-1 產業現況以及製造流程 太陽能在我國的使用率仍然偏低,目前以外銷為主,成品大多數 銷往已開發國家。在眾多已開發國家因考量發電成本以及政府積極鼓 勵發展太陽能,並且設置許多金額補貼措施,許多已開發國家的企業 以及民家普遍可以看到使用太陽能相關產品。 太陽能的發展方向,主要朝向高效率以及低成本的方向發展,許 多國家級的研究單位以及企業組織不斷的研究發展出新的產品,期望 研發出更好的產品,並且對太陽光能量有更多的應用,展望未來能夠 有更多替代能源的出現,目前太陽能晶片在台灣以工業大量生產的種 類有矽晶製程以及薄膜製程兩大分類,在我國比較容易發展是因為此 項製程部份沿用半導體以及 LCD 面板,而在政府發展兩兆雙星產業 多年,已經奠定我國在這兩項領域的深厚工業基礎,繼續發展相關產 品將可以快速的進入這項產品的市場。矽晶製程與半導體製程多有相 似之處,而且不需要使用到半導體相當高技術的製程,另外在薄膜製 程則與面板製造有部份相同的地方,所以此項產品在我國基於現有的 技術引導下,將可以快速的發展茁壯。 在太陽能產業的發展,目前國際間大多以歐洲國家在主導整個市陽能產業也大多與歐洲各國以及民間企業合作發展,早期關鍵技術是 有歐洲各國所掌握,不過近年來,我國不間斷的研發創新,並且有半 導體製程的基礎做後盾,目前已經能夠慢慢的趕上國際間的腳步。 由於矽晶製程的應用條件優於其他種類的製程(表 2.1),因此領 先其它的製造方式,在材料取得以及轉換效率都遠大於其他形式的太 陽能晶片,而且矽晶製造過程與半導體技術多有相似之處,而我國在 半導體工業歷經多年的發展已經是有目共睹,半導體的年產值在國際 市場上更是有舉足輕重之地位。[2] 表 2.1 矽晶型太陽能轉換率
太陽能晶片製造流程簡介 [2] 太陽能產業可以概分為上、中、下游產業, 此概分法是依照主 要製程來區分,不過也有許多企業製造能力已經可以涵蓋到範圍更廣 的產業別,但是為了方便區分,仍然會以三個生產階段來說明介紹: 上游產業: (1)長晶製程:這項製程與半導體的長晶製程類似。主要原料為 矽,以高溫將矽材料溶融,將矽溶湯置於在石英爐內,並且置入晶種, 當矽融湯與晶種結合後,在緩慢的拉出矽溶湯,將長成一單晶矽圓柱。 (2)修邊:晶柱長成後,外型為 5 吋或是 6 吋圓柱狀,此外型不利 於陣列的排列,因此會將晶片的外圍切成方形,在模組串列焊接段可 以節省排列的空間。 (3)切割:使用線切割機將晶柱切割成 0.2mm 厚度之晶片
中游產業:[7][8] 圖 2.1 中游產業製造流程圖 (1) 進料檢驗(Wafer Inspector):主要為晶片外觀檢察、厚度 以及電阻值測量、檢查裂片等項目。 (2) 表面粗化(Texture):在此階段去除切片時產生的切痕, 同時將晶片表面蝕刻為粗糙面,使入射的光線不容易 反射,增加晶片表面的受光。 (3) 高溫磷擴散(Diffusion):在高溫爐中通入含磷氣體, 使 電洞較多的 P 型矽晶片表層滲入磷, 形成電子較多的 N 型區域。形成光電轉換所需的 P-N junction。
(4) 磷玻璃去除(Phosphorous Glass Etching): 磷玻璃是磷
擴散後的副產品,此副產品會影相發電效能,必須以 氫氟酸洗淨去除之後,才能進行後續的製程。
(5) 抗反射層(PECVD):在晶片表面鍍上氮化矽抗反射層, 顏色以藍色為主,主要目的為降低光的反射。
(6) 網印以及燒結(Print and Cofiring):正反面之粗細電極
皆以網印之方式將含銀、含鋁之漿料印製於晶片表 面,再經過燒結處理才能穿透正面氮化矽鍍層並滲入 矽晶片表層, 緊密結合並將電流導出。 (7) 雷射切割絕緣(LASER Isolation): 以 P 型矽晶片製做之 太陽能電池正面為負極(-), 背面為正極(+), 為避免正 負兩極之間在晶片邊緣有短路之現象, 需以雷射光束 沿晶片邊緣處切割出一道深度超過 P-N junction 之凹 槽, 如此電流才能正確導出。此功能也可由電漿處理 或化學蝕刻製程進行。
(8) 測試以及分類(Testing and sorting):檢測正反面外觀以
及量測光電轉換效率等電性資料後, 依據設定之產品 分類定義進行篩選分類。
下游產業:[2]
將晶片串並聯在一起,以提高實用性,主要製程內容如下 (1) 選擇晶片以及設計模組性能
(3) 真空壓熱封裝 (4) 性能檢測
2-2 分片裝置原理以及架構介紹 分片裝置包含八個主要的單元: 太陽能矽晶片 晶片承載裝置 升降裝置 噴嘴裝置 晶片高度位置感測器 調速閥 流量計 氣壓系統
太陽能晶片(圖2.2) 太陽能晶片為本研究主要的對象,由6吋晶圓棒經過切割後的尺 寸為156x156x0.02(單位:mm) ,矽晶片本身是硬脆材料,再加上厚度 與長寬的比例尺寸差異大,容易產生應力而斷裂,因此必須小心的處 理。 單位:mm 圖 2.2 太陽能矽晶片外型尺寸 晶片承載裝置(圖2.3) 提供一個適合載放晶片的空間,當氣嘴吹出之壓縮空氣對晶片做 分片動作時,此裝置將提供一個適當的空間,適當的空間是指在X、
Y、Z三度空間的座標中,將晶片限制X、Y方向的自由度,而給予Z 方向的自由度。在限制X、Y方向的自由度仍必須考量其結構件是否 會影響到流場的分佈,當壓縮空氣經由氣嘴噴出時,氣流穿過晶片必 須能夠順利排放出至大氣中。 圖 2.3 晶片承載裝置 伺服升降裝置(圖2.4) 主要包含一伺服馬達以及滾珠導螺桿,馬達提供旋轉運動的動力 源帶動滾珠導螺桿,同時將旋轉運動轉為直線運動,此直線運動的主 要功能在帶動晶片做昇降的動作,當晶片依序被取走後,伺服機構依 照程式指令做供料的動作。
圖 2.4 伺服升降裝置 噴嘴裝置 使用的配置在晶片的兩側同時開啟對晶片吹氣,平均的供給氣流 讓晶片產生浮力。 噴嘴裝置使用壓縮空氣經由氣嘴的腔體設計,將氣體整流成為適 合分離晶片所使用,氣體由進入噴嘴裝置內部,將氣體整流為細長的 形式後從出風口噴出,出風口的形狀為狹長的形式,尺寸為寬0.5mm 高6mm,寬與高的比例為1:12
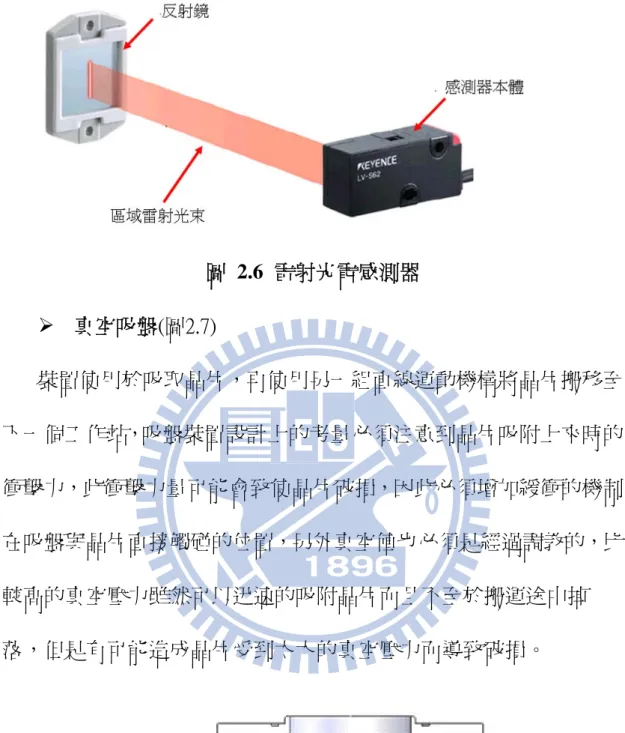
單位:mm 圖 2.5 氣流噴嘴尺寸 雷射光電感測器[3] (圖2.6) 位於承載裝置上緣,主要目的在感測晶片高度的位置,當晶片因 氣體的浮力上升遮蔽到感測器的光束時,致使信號觸發,原先已經在 上方待命的取片裝置立即將晶片取走。感測器使用反射式的形式,由 感測器本體發射出狹長型的雷射光束,經過反射鏡入射到感測器本體 的受光處,可調整反射後接受的光強做為觸發訊號。
圖 2.6 雷射光電感測器 真空吸盤(圖2.7) 裝置使用於吸取晶片,再使用另一組直線運動機構將晶片搬移至 下一個工作站,吸盤裝置設計上的考量必須注意到晶片吸附上來時的 衝擊力,此衝擊力量可能會致使晶片破損,因此必須增加緩衝的機制 在吸盤與晶片直接觸碰的位置,另外真空值也必須是經過調教的,比 較高的真空壓力雖然可以迅速的吸附晶片而且不至於搬運途中掉 落,但是有可能造成晶片受到太大的真空壓力而導致破損。
圖 2.7 真空吸盤 流量感測計[4] (圖2.8)(表2,2) 用來測量噴嘴裝置的實際流量,此流量計有提供數位顯示器之功 能,使用單位是L/min,顯示單位可以到小數點後一位,流量計使用 時與噴嘴做串連在一起,在噴流開啟的同時一併測量流量。 圖 2.8 流量感測器 表 2.2 流量計使用規格表
氣壓系統(圖2.9) 氣壓系統主要由廠務供給氣壓源,經過減壓閥將壓力調降為實際 所需要的壓力值,再由電磁閥控制噴嘴氣流的開與關,電磁閥平時為 關閉的狀態,當晶片到達指定位置時,並且電控程式下達指令後,電 磁閥開啟將壓縮空氣導通到噴嘴位置。 圖 2.9 氣壓系統圖 上訴的幾個重要元件乃是針對細部功能做說明,實際上的設計規 劃必須具備整體的考量,必須要能配合快速的自動化生產、產品損壞 率低、人員操作便利性的規劃、易於維修保養、選用材料合乎成本。 在產品開發過程,可能因為功能上的互相衝突,必須遷就於另外一方 面更重要的功能考量,才能針對使用者的習慣做最佳的設計,因此在
設計之初應該要有各項功能所佔權重的評比以及客戶使用習慣的訪 查,定製規格比較完善的規格再進行產品的開發。 動作流程說明 以下的內文以及圖片在說明噴流分離機構主要的動作流程做介 紹,在整個生產動作中,整體的動作以噴嘴的開關以及晶片上下移動 的時間為最主要的兩個動作,這兩個動作必須要互相搭配在適合的時 間開始或是停止動作,而動作的切換點則以位置感測器做為訊號的觸 發開關。 (1) 噴嘴為開啟狀態,此時晶片開始緩慢的上昇。(圖 2.10) 圖 2.10 動作流程說明-1 噴流開啟 晶片上升中 位置感測器
(2)晶片繼續緩慢的上昇,已經到達噴嘴位置,並且吹離晶片。(圖 2.11) 圖 2.11 動作流程說明-2 (3)當晶片再繼續緩慢的上昇,吹離的晶片已經觸發到位置感測 器,此時晶片將立即停止上升。(圖 2.12) 圖 2.12 動作流程說明-3 噴流開啟 噴流開啟 晶片停止上升 位置感測器 噴流開啟 晶片上升中 位置感測器
(4)取片裝置將晶片取走的同時,噴嘴將關閉,其餘的晶片將立即 的下降,避免取片裝置上升產生的負壓將其它的晶片向上牽引。(圖 2.13) 圖 2.13 動作流程說明-4 噴流開啟 晶片下降 位置感測器 取片裝置將矽晶片取走
2-3 CFD原理介紹 計算流體力學的應用已經從最初的航空領域不斷地擴展到船 舶,海洋,化學,工業設計,城市規劃設計,建築消防設計,汽車多 個領域。近幾年來計算流體力學在全機流場計算,旋翼計算,航空發 動機內流計算,導彈投放,飛機外掛物,水下流體力學,汽車等方面 獲得廣泛應用。整個計算流體力學處理過程大致包括三個部分:前處 理,包括幾何模型的選取和網格劃分,求解器,包括確定計算流體力 學方法的控制方程,選擇離散方法進行離散,選用數值計算方法,輸 人相關參數;後處理,包括速度場,壓力場,溫度場及其它參數的計 算機可視化及動畫處理等。由此和計算流體力學在工程實際中的應用 可以將計算流體力學應用的優點大致歸納如下:可以更細緻地分析, 研究流體的流動,物質和能量的傳遞等過程,可以容易地改變實驗條 件,以獲取大量在傳統實驗中很難得到的信息資料;整個研究,所使 用的時間大大減少;可以方便的用於那些無法實現具體測量的場合, 如高溫,危險的環境;根據模擬數據,可以全方位的控制過程和優化 設計。 使用FLUENT 軟體進行模擬時,必須要設置演算法、邊界條件、 工作環境,演算法的選擇特別重要,對模擬的結果有很大的影響,必 需要特別的重視,必須要瞭解數值模擬(Numerical Simulation)的
過程,才能正確設置數值模擬的條件。 工程問題可以採用「區域離散化(Domain Discretization)」的數 值計算並借助電腦得到滿足工程要求的數值解,數值模擬技術是工程 發展重要的一環。 區域離散化是在原來連續的空間中使用一組有限個離散點代 替。將區域切割成許多互不重疊的子區域,子區域的節點位置和該節 點所代表的是控制體積。節點(Joints)可以解釋為未知物理量的幾 何 位 置 , 控 制 體 積 ( Control Volume ) 代 表 的 是 應 用 控 制 方 程 (Governing Equation)或守恆定律(Conservation Law)的最小幾何 單位,節點可以視為代表著控制體積,而控制體積和子區域並不一定 是重合的。在區域離散化開始時,由坐標軸對應的直線或曲線所切劃 出來需多子區域(Subzone)。區域離散的基礎元素就是網格,而網 格節點是離散化物理量的存儲位置。
常用的離散化方法有「有限差分法(Finite Difference Method, FDM)」、「有限元素法(Finite Element Method, FEM)」以及「有 限體積法(Finite Volume Method, FVM)」,由於Fluent是基於有限 體積法,以下對有限體積法簡要說明。
分,從中求解得到一組離散方程,其中的因變量就是網格節點上的未 知數是。有限體積法的基本思路即是子域法加離散,可求出其物理解 釋。離散方程的物理意義是因變數在有限大小的控制體積中的守恆原 理,就如微分方程表示因變數在無限小的控制體積中的守恆原理一 樣。有限體積法得出的離散方程,要使因變量的積分守恆對任意一組 控制體積都可以得到滿足,對於整個計算區域,最終將會得到滿足, 這是有限體積法的優點。相對於有限差分法,只有當網格密度極高 時,離散方程才滿足積分守恆定理,若使用有限體積法即使在網格密 度低的情況下,仍然可以顯示出準確的積分守恆。[1];[10];[11] 有限體積法的求解方法 在求解之前必須先將控制方程離散化。FLUENT求解提供三種壓 力與速度的耦合方式選擇,分別是SIMPLE格式、SIMPLEC格式和PISO 格式。 SIMPLE演算法是目前工程應用最為廣泛的一種流場計算方法,它 屬於壓力修正法之一。SIMPLE演算法於1972年由Patankar和Spalding所 提出,主要用於求解不可壓縮流場的數值方法。它的概念是採用「猜 測-修正」為核心,以網格為基礎來計算壓力場,從而達到求解動量 方程的目的。SIMPLE演算法的中心思想為:對於給定的壓力場,從 離散形式的動量方程得到速度場。由於壓力是假定的或者不準確的,
所以得到的速度場大多是不滿足連續性方程,必須對壓力場進行逐步 修正。修正的原則是與修正後的壓力場相對應的速度場能滿足這一迭 代層次上的連續方程。根據此原則,將由動量方程的離散形式所規定 的壓力與速度的關係代入連續方程的離散形式,而得到壓力修正方程 式,再由壓力修正方程得到壓力修正值。再根據修正後的壓力場,求 得新的速度場,然後檢查速度場是否已經收斂。若沒有收斂的狀況 下,用修正後的壓力值給定的新的壓力場,開始下一迭代層次的計 算,直到解出收斂值為止。以上所描述的內容,主要解釋在於如何獲 得壓力修正值並且根據壓力修正值給定速度修正方程。 SIMPLEC演算法與SIMPLE演算法在基本原理上是一樣的,不同點 在於SIMPLEC演算法加快了計算的收斂速度,因為SIMPLEC在通量修 正方法上改進許多。PISO演算法是壓力的隱式運算元分割演算法,起 初是針對非穩態可壓縮流動的無迭代計算所建立的一種壓力速度計 算程序,後來在穩態問題的迭代計算中也比較廣泛地使用了該演算 法 。 PISO 演 算 法 與 SIMPLE 及 SIMPLEC 演 算 法 的 不 同 之 處 在 於 : SIMPLE和SMPLEC演算法是兩步演算法,由預測步和修正步組成;而 PISO演算法增加了一個修正步,包含一個預測步和兩個修正步,在完 成了第一步修正步得到速度場和壓力場後尋求第二次改進值。目的是
了預測-修正-再修正三個步驟,從而加快了單個迭代步中的收斂速 度。 綜合以上,SIMPLE 演算法是SIMPLE 演算法系列的基礎,目前 各種CFD軟體中均提供這種演算法,而SIMPLEC 和PISO 演算法主要 是提高了計算的收斂性,從而縮短了計算時間。[1];[11] 圖 2.14 SIMPLE 壓力求解速度流程圖 求解動量方程 求解壓力修正方程 更新壓強、質量流量 求解能量、紊流方程 是否收歛 停止 是 否 給予假定值 更新未知量
2-4 Fluent軟體簡介 Fluent是目前國際上比較流行的商用CFD套裝軟體,市場佔有率 高,只要涉及流體、熱傳遞及化學反應等的工程問題,都可以用Fluent 進行解算。它具有豐富的物理模型、先進的數值方法以及強大的前後 處理功能,在航空航太、汽車設計、石油天然氣、渦輪機設計等方面 都有著廣泛的應用。例如,石油天然氣工業上的應用就包括燃燒、井 下分析、噴射控制、環境分析、油氣消散/聚積、多相流、管道流動 等。 Fluent能夠解決的工程問題可以歸結為以下幾個方面: 採用三角形、四邊形、四面體、六面體及其混合網格計算二維和 三維流動問題。計算過程中,網格可以自適應。 可壓縮與不可壓縮流動問題。 穩態和瞬態流動問題。 無粘流、層流及湍流問題。 牛頓流體及非牛頓流體。 對流換熱問題(包括自然對流和混合對流)。 導熱與對流換熱耦合問題。 輻射換熱。
多運動坐標系下的流動問題。 化學組分混合與反應。 可以處理熱量、品質、動量和化學組分的源項。 用Lagrangian軌道模型類比稀疏相(顆粒、水滴、氣泡等)。 多孔介質流動。 一維風扇、熱交換器性能計算。 兩相流問題。 複雜表面形狀下的自由面流動。 Fluent軟體設計基於CFD軟體群的思想,從用戶需求角度出發,針 對各種複雜流動和物理現象,採用不同的離散格式和數值方法,在特 定的領域內使計算速度、穩定性和精度等方面達到最佳組合,從而可 以高效解決各個領域的複雜流動計算問題。基於上述思想,Fluent開 發了適用於各個領域的流動類比軟體,用於類比流體流動、傳熱傳 質、化學反應和其他複雜的物理現象,各類比軟體都採用了統一的網 格生成技術和共同的圖形介面,它們之間的區別僅在於應用的工業背 景不同,因此大大方便了用戶。 Fluent的套裝軟體由以下幾部分組成。 (1) 前處理器:Gambit用於網格的生成,它是具有超強組合建構模 型能力的專用CFD前置處理器。Fluent系列產品皆採用Fluent公司自行
研發的Gambit前處理軟體來建立幾何形狀及生成網格。另外,TGrid 和Filters(Translators)是獨立於Fluent的前處理器,其中TGrid用於從現有 的邊界網格生成體網格,Filters可以轉換由其他軟體生成的網格從而 用 於 Fluent 計 算 。 與 Filters 介 面 的 程 式 包 括 ANSYS 、 I-DEAS 、 NASTRAN、PATRAN等。 (2) 求解器:它是流體計算的核心,根據專業領域的不同,求解 器主要分為以下幾種類型。 Fluent 4.5:基于結構化網格的通用CFD求解器。 Fluent 6.3.26:基于非結構化網格的通用CFD求解器。 Fidap:基於有限元方法,並且主要用於流固耦合的通用CFD 求解器。 Polyflow:針對黏彈性流動專用CFD求解器。 Mixsim:針對攪拌混合問題專用CFD軟體。 Icepak:應用於熱流分析CFD軟體。 (3) 後處理器:Fluent求解器本身就附帶有比較強大的後處理功 能。另外,Tecplot也是一款比較專業的後處理器,可以把一些資料視 覺化,這對於資料處理要求比較高的用戶來說是一個理想的選擇。 在以上介紹的Fluent套裝軟體中,求解器Fluent是應用範圍最廣
二維問題,可以使用四邊形網格和三角形網格(圖2.16);對於三維問 題,可以使用六面體、四面體,錐形網格以及楔形網格(圖2.17)。Fluent 可以接受單塊和多塊網格,以及二維混合網格和三維混合網格。
圖 2.15 Fluent 使用二維網格
2-5 矽晶片材料性質回顧 矽晶片屬於硬脆材料,依照晶格排列可以分為單晶矽以及多晶 矽,若是依照機械強度來區分,單晶矽有較高的破壞應力,多晶矽的 破壞應力值比較低,原因是多晶矽的晶格排列是無次序的,在晶格交 界的位置是產生破壞裂紋的起始點。 在研究矽晶片的變形量以及各種破壞現象之前,矽晶的強度必須 先探討的,Chen等人[18]使用壓痕測試普洛氏(Knoop hardness)壓痕測 試多晶矽之破壞韌性為。李中蘭等人[19]將太陽能矽晶片成品以三點 測試破壞應力,由於圖佈導線鋁材以及燒結以及各項製程的影響,導 致各部位的破壞應力不同,破壞應力位於60Mpa~130Mpa之間。楊氏 係數是探討材料性質的重要參數之一,陳啟宗[20]於2004年使用不同 的長寬尺寸矽晶片材料使用三點測試求得楊氏係數,因不同的試片而 有些微的差異,應力值分佈於166Gpa~173Gpa之間。
第三章 研究內容與方法
3-1 研究內容概述 本研究使用Gambit 繪圖軟體建立3D模型,再使用Fluent數值分析 軟體對3D模型的重要特徵做分析,並且在特徵部位將數個參數帶入軟 體進行分析,然而在多個參數的交互作用下,將會衍生出多個結果, 會導致實驗結果過度的發散,因此,參數與導出結果必須有效的整 合,才能將實驗過程有效率的進行。由模擬得到初步的特徵後,將進 行實驗的部份,實驗的內容針對矽晶片的氣嘴分離時的暫態產生的變 形量以及穩態時由氣流產生的振動加速度。 第一階段主要建立數個目前正在使用的模型,因此在初步規劃會 設計幾組不同的裝置,改變其中的參數做為實驗的控制變因,在預先 規劃好的控制變因下建立分析模型與參數值的相關性。 在第二階段則利用電腦模擬輔助設計,設定不同的參數,包括噴 嘴的數量以及角度,以及噴嘴相關位置等,分析各種參數對於性能影 響,進而改良分離裝置的性能。 第三階段將使用流場模擬結果做為實驗參數之依據,並且將所得 之實驗數據做分類、優劣判別。實驗過程需使用數種測量儀器做為矽 晶片的狀態監控,將實驗結果以數據呈現,並且將數據交叉比對,從 微觀開始以點、線、面的方式架構出全面結論。為了有效率的進行模擬,過程依照分析流程將研究內容分為五大 類(圖3.1),並且將工作內容再分成數個細項,這些分類以及細項內容 乃是完成本研究不可缺少的作業流程,若是將它定義清楚,之後再進 行相關的模擬以及實驗則有一個參考的依據。 環境參數制定 固定參數 實驗參數 建構流場模型 繪製模型 網格建立 數值模擬 邊界條件 流體性質設定 實驗規劃與方法 變形量 材料試驗 實驗結果整理 數據整理 資料歸檔
3-2 流場模擬參數設定 3-2-1 基本假設條件 為了更有效率的進行軟體的分析,必須將實際的物理條件做假 設,本研究所使用的流體為一般空氣,使用噴嘴將氣體整流為尖角的 形狀,因流速低於0.3馬赫時,仍屬於低速流動,流體的壓縮變化不 大,可視為不可壓縮流體。 基本假設條件如下: 工作流體為空氣 使用不可壓縮流場 不考慮溫度的效應 使用紊流模式模擬 其中紊流模式由雷諾數(Re)決定 Re<2100= 層流 2100<Re<4000= 過度流 Re>4000= 紊流 可以由以下計算得到雷諾數 (1) 黏度 密度 流速 等效管徑 雷諾數 (2) B A 2AB 其中等效管徑
圖 3.2 雷諾數計算管徑說明圖 3-2-2 邊界條件設定 以下為本次模擬會使用的邊界條件: Velocity inlet入口:設定入口速度給定計算。 Outflow出口:用於模擬無法知道出口的速度以及壓力情況設定。 Wall壁面:其餘的壁面皆為Wall邊界條件。
3-2-3 參數設定以及模型選用 針對影響分片機構空間流場分佈為主要探討,進行一系列不同條 件下的模擬、分析、評估,藉以探討、速度場、流線以及紊流干擾等 之分佈型態。 本論文內容將參數分成固定參數以及實驗參數,將部分參數歸類 為固定參數是因為某些數值的變化不具實驗模擬性質,因此將它歸類 為固定參數,實驗參數的部份則是搭配不同的模擬規劃而做調整,實 驗參數主要針對噴嘴的數量以及角度做為實驗對象(圖 3.3)。 圖 3.3 模擬架構式意圖
表 3. 1 參數表格
單對噴嘴 雙對噴嘴 雙對角度噴嘴
流量 30L/min 15L/min 15L/min
流體壓力 5kg/cm2 3.5kg/cm2 5kg/cm2 3.5kg/cm2 5kg/cm2 3.5kg/cm2 變形量 加速度量 實驗項目 吹離速度(變形測量可間接量得) 固定參數 固定參數包含了模型機構的幾何尺寸以及流體性質兩大部份,以 下兩項的參數將維持固定不變的值來做後續的模擬。 (1)幾何尺寸 承載裝置(圖3.3)的功能主要在於限制晶片在X、Y方向的自由度, 並提供Z方向的自由度,所以會對晶片的外型產生支撐,在噴流分離 的同時將會對氣流造成影響,因此必須在此明確的定義承載裝置的重 要尺寸以及相對於晶片的位置。 承載裝置的內側尺寸(圖3.4)必須是可以容納晶片的尺寸(156mm x 156mm),在實際應用的尺寸必須有預度可以讓晶片在上升或是下降 有自由度的,實際的預度是2mm,也就是內側尺寸必須是要158mm x 158mm,但在本論文以156mm x 156mm為模型的尺寸,因為2mm的預
產生重大的影響,因此將簡化模型達到網格建立以及數值分析的時效 性。 單位:mm 圖 3.4 晶片承載裝置機構尺寸圖-上視圖 噴嘴距離矽晶片為10mm(圖3.5),本實驗將此距離歸類為固定參 數,因此在後續的研究模擬過程,將不會變更此參數尺寸。
單位:mm 圖 3.5 噴嘴裝置到晶片距離-上視圖 噴嘴中心位置於承載機構接近上緣的位置,是要讓分離的晶片能 夠快速的被取走,因此上方位置為一個自由流場的空間。 圖3.6顯示實際將晶片吹離上浮的高度,以及噴嘴口相對尺寸。被 吹離的晶片為五片,但是第三片之下的晶片被吹離的高度並不明顯, 原因是此位置的晶片位於噴嘴氣流量的邊緣位置,接受到的硫量比較 小,因此在本論文研究中並不對第三片之下的晶片做探討。
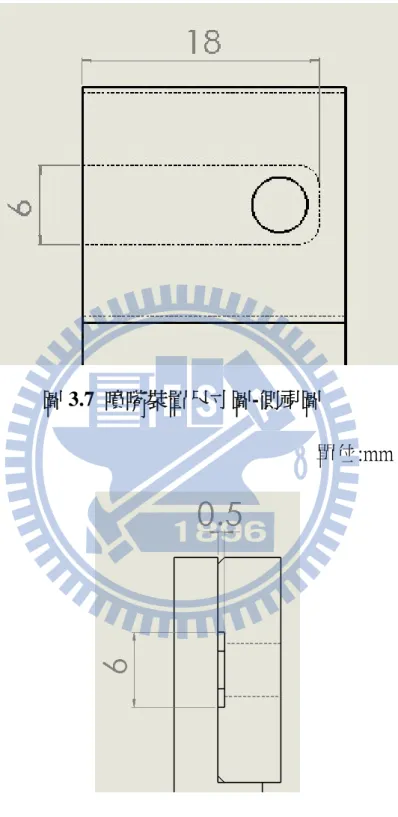
單位:mm 圖 3.6 噴嘴位置尺寸圖 噴嘴裝置的出口高度為6mm,寬度為0.5mm,由此可看到整體的 出風口為細長的尺寸(圖3.7) (圖3.8),讓氣流可以比較集中在噴嘴中心 位置,才可以侵入堆疊的晶片縫隙中,而產生分片。 已分離狀態 尚未分離狀態
單位:mm
圖 3.7 噴嘴裝置尺寸圖-側視圖
單位:mm
圖 3.8 噴嘴裝置尺寸圖-前視圖
實數驗參 在實驗參數選擇的部份,會有許多總類的搭配組合出現,會導致 研究方向太發散,因此本論文在分析前先選定幾個值得研究探討的方 案,並且先給予假設預期的結果,待模擬完成後再與預期結果互相比 較。 實驗參數的選定是在預期結果的條件下選定,並且給予實驗結果 的期望值,以下針對實驗參數的部份做說明。
單對噴嘴預期結果: 優點:同一噴流方向的氣流不會產生互相干擾。 缺點:由於噴嘴的數量比較少,支撐晶片上浮的面積也相對較 少,所以造成晶片應力集中。 圖 3.9 單對噴嘴上視圖 噴流方向 噴流方向
雙對噴嘴預期結果: 優點:噴嘴的數量比較多,支撐晶片上浮的面積也相對較大,產 生的應力比較小。 缺點:噴流會於矽晶片中心互相撞擊,會產生互相干擾。 圖 3.10 雙對噴嘴上視圖 噴流方向 噴流方向
雙對角度噴嘴預期結果: 優點:1.與雙直線噴嘴產生的應力相同,相較於單噴嘴的應力小。 2. 噴流產生的應力小於單對噴嘴。 3. 同一噴流方向的噴嘴出口夾角,讓氣流不會產生互相干 擾。 缺點:氣流撞擊承載裝置支柱位置,造成壓力不均勻。 噴流方向 噴流方向
3-3 模型以及網格建立 本研究使用Gambit軟體建立模型特徵以及網格特徵,Gambit 是包 含在Fluent之中的套裝軟體,專門為Fluent前置作業所設計的軟體。 此軟體的模型建立與一般的3D建模軟體概念相似,由點、線、面、 體積四大主要功能的方式產生模型,另外模型特徵編修主要就是其它 次要工具的長出實體以及除料,來讓模型更趨近於實體。(圖3.12) 圖 3.12 Gambit 使用介面 若是直接使用體積長出的方式建模,可以提高工作完成的時效 性,可以不需要使用點、線、面的方式長出實體模型,因此本研究的 建模使用多個體積方塊產生,再將除料的部份使用體積除料指令完
成。在模型建立時應該要簡化模型,聚焦於主要的分析部位,而本研 究主要探討的對象是被噴嘴吹離的最上方二片太陽能晶片,因此在建 立模型的部份並不需要將整個承載裝置都放到模型中(圖3.13)。 依照實驗參數的規劃,首先建立單噴嘴的模型以及網格。 圖 3.13 單對噴嘴模型 網格的建立使用Tex/Hybrid,網格主要由四面體構成,但是可以有 彈性的使用六面體、錐形和楔形網格。建立網格完成後,查看網格數 量是1804004個。(圖3.14)
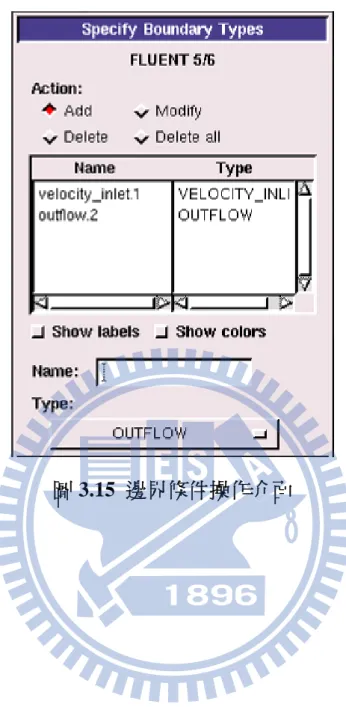
圖 3.14 單對噴嘴網格 邊界條件選定(圖3.15) ‧ 設定Velocity inlet入口邊界條件:設定入口速度給定計算,使用於 不可壓縮流體,若使用於可壓縮流會產生非物理的現象。 ‧ 設定Outflow出口邊界條件:用於模擬無法知道出口的速度以及 壓力狀況下,不需要設定出口的參數,此一邊界條件不能用於 可壓縮流體的分析。 ‧ 設定Wall固體壁面條件:Wall為Fluent預設的邊界條件,只需設定 完成出、入口條件後,其餘的壁面皆為Wall邊界條件。
3-4 FLUENT軟體模擬 精度等級設定 開啟檔案之前,必須先要確定使用哪一種精度等級做模擬,3D 的模擬可以選擇3d單精度以及3dd雙精度,精度愈高模擬結果愈精 確,但是模擬的時間也會比較長,本論文研究需要的精度為中等精 度,使用3d單精度模擬可以滿足需求。(圖3.16) 網格體積檢查 網格文件開啟載入軟體後必須要先檢查網格,檢查訊息如圖所示 (圖3.17),必須注意的是網格最小體積一定要大於零。 網格面位置檢查 網格面位置可以使用顏色的差異目測檢查,檢查建立邊界條件 時,是否有遺漏或是加選的網格面,本研究必須檢查三個網格面,也 就是Velocity inlet(圖3.18)、Outflow(圖3.19)、Wall(圖3.20)。
圖 3.18 Velocity inlet 網格位置檢查 圖 3.19 Outflow 網格位置檢查 圖 3.20 Wall 網格位置檢查 3-4-1 流場模擬結果 將研究預先規劃好的條件開始進行模擬,首先對模型的流場數學 式進行運算,若是設定疊代次數不足,運算的條件仍然處於未穩定狀 態,必須要增加疊代次數到可視化圖形為穩定平行之曲線,即可對模
擬結果開始判別優劣。(圖3.21,圖3.24,圖3.27,圖3.30) 由等角視圖可看出,紊流最大的位置集中在噴嘴與矽晶片交會位 置,流體在此位置碰觸到細薄狀的矽晶片,氣體在此處一分為二,此 位置是造成矽晶片產生加速度的最大原因。(圖3.22,圖3.25,圖3.28,圖 3.31)。 若是分析等角視圖所呈現之流場狀態可發現,使用雙噴流55度之 模擬結果,氣流脫離噴嘴後,有部分撞擊到矽晶片周圍之檔塊,因此 造成空氣動能的消耗,另一方面就是產生更大的紊流,若是互相比對 雙噴流65度之結果,則無發生此現象。(圖3.29,圖3.32)。 若要針對矽晶片的噴流分離之穩定狀態做探討,必須對此位置加 以分析數據,因此,必須將此位置的紊流強度加以量化並且比對,紊 流強度是依照流體慣性力除以黏性力之比值換算為百分比,若是慣性 力大於黏性力,紊流強度百分比就會比較高 。(圖3.23,圖3.26, 圖3.29, 圖3.32)。
單對噴嘴模擬
圖 3.21 單對噴嘴疊代圖
圖 3.23 單對噴嘴紊流強度與位置關係圖 雙對噴嘴模擬
圖 3.25 雙對噴嘴紊流強度等角視圖
圖 3.26 雙對噴嘴紊流強度與位置關係圖
雙對55度噴嘴模擬
圖 3.29 雙對 55 度紊流強度與位置關係圖 雙對65度噴嘴模擬
圖 3.30 雙對 65 度噴嘴疊代圖
圖 3.31 雙對 65 度噴嘴紊流強度等角視圖
圖 3.32 雙對 65 度紊流強度與位置關係圖
3-5 實驗方法與過程 矽晶片於堆疊狀態時,因材料的平整度佳,加上材料重量以及長 時間的推疊,造成彼此之間低於外界之大氣壓力,因此將矽晶片互相 吸附,使用噴流分離過程中,必須要克服此負壓,才能將矽晶片分離, 但在初始分離時,矽晶片將產生整個過程中最大的變形量,若是矽晶 片原先有部分的缺陷,將會有破裂的情況產生,但有部分缺陷的矽晶 片,若是堪用的情況下,仍然不允許破片的狀況發生,因此必須將吹 離的狀態加以研究,讓吹離矽晶片的動作可以達到更佳的狀態。 圖3.33 單對噴嘴實驗照片
圖 3.34 雙對噴嘴實驗照片
圖 3.36 噴嘴實物照片
單位:mm
圖 3.37 矽晶片劃分九等分位置
3-5-1 變形量研究 關於矽晶片的變形量研究,使用三個感測器分別測量矽晶片的位 置,首先將矽晶片劃分成九個位置(圖3.38),並以三點測量的方式於 噴嘴啟動同一時間測量形狀的變化,並將其差值計算得出變型量。 因矽晶片分離時,位置不斷的移動變化,在不影響測量準確性為 前提之下,必須使用非接觸式的測量儀器,本實驗使用日本廠牌 Keyence出產的工業用光電感測器,測定原理是當目標物位置變化 時,在光學感測元件的受光位置改變,可因此測定物體的移動量(圖 3.39) 圖 3.38 非接觸式感測器原理示意圖
片之變形量,本實驗使用 33ms 讀取速度測量,測定精度選用 1μm 等級,測定距離為 30mm(表 3.1)。 表 3. 2 感測器規格 廠牌 型號 測量距離 重複精度 取樣速度 Kerence IL-S025 30mm 1μm 33ms 矽晶片於氣浮的過程中,並非平行等高的上昇,會是以傾斜的狀 態升高,因此必須要將三點位置的差距計算,才能得知變形量數值, 計算方式如下: (B+C)/2=D (3) A-D=變形量 (4) 上式先求得D點位置(3),在將D點的位置與A點的位置相減(4),可 計算出當時矽晶片變形量。
圖 3.39 高度與變形量計算方式圖示 若要能同一時間測量矽晶片於同一時間之變形,必須使用九個光 電感測器,因目前器材只有三個感測器,因此必須要分段作實驗紀 錄,將測量的次數分為六次,每壹次測量三個點位置。 單位:mm 圖 3.40 測量組別說明
圖 3.41 實驗過程照片-1
3-5-2 加速度的研究 矽晶片使用氣體噴嘴分離後,到達穩定氣浮狀態時,必須等待機 器手臂取走產品,一般應該要照正常的生產過程在一定時間內取走, 但若是下遊設備因故停止時,矽晶片仍然以氣浮的狀態等待取片,而 在氣浮穩態時,矽晶片會因為氣流而產生高頻的振動,本章節的實驗 乃是針對噴流對矽晶片振動產生加速度的影響加以研究探討,因此必 須用測量儀器讀取矽晶片表面的振動值。 本加速度實驗使用日本製造Keyence高頻位移感測器,測定原理 是當矽晶片位置變化時,在光學感測元件的受光位置改變,可因此測 定物體的移動量,感測器的最高頻率為400KHZ,檢測距離為30mm, 足以應付本實驗的需求。
此感測器還必須搭配專用控制器以配合高速的量測以及監控感 測器本體之狀態,另外,感測器本身之性能的調整必須由個人電腦設 定,因此必須要安裝軟體,才可以進行的測量。 圖3.44 感測器部位功能明 此感測器可高速讀取,但本實驗使用速度為5ms,等於是200HZ之速 度。(表3.2) 表 3.2 加速度感測器規格 廠牌 型號 測量距離 重複精度 取樣速度 Kerence LK-030 30mm 1μm 5ms
圖3.45 加速度實驗過程照片 3-5-3 多晶矽材料試驗 本論文研究探討的對象為多晶矽材料,因此對材料的破壞應力特 性做測試,試驗方法使用三點量測方式得知材料之特性。 試驗材料之特性的方式,使用三點測量法,將材料置放於兩個固 定架上,並將壓力施加於材料之中心位置,在中心位置測量下降高 度,同時紀錄壓力棒的讀值變化,於每增加50g重量時記錄當下的壓 力以及位移的變化,一直到材料破裂為止。(圖3.47) 壓力測試元件使用的是日本OHBASIKI機械式推力計,此推力計 可做推力以及拉力的測試,在本實驗則是使用推力部份之功能。(圖
在試驗材料尺寸的部份,使用原有矽晶片之材料進行測試,也就 是156mm x 156mm x 0.2mm的外觀尺寸。
圖3.47 推力計照片
第四章 實驗結果與討論
4-1 變形量結果討論 若以參考本論文使用噴嘴之方式做應用,在不改變噴嘴距離以及 角度的前提下,會影響矽晶片破裂的會是在厚度的尺寸,因此,若需 要使用薄化的矽晶片,必須考量使用氣浮之變形量,本實驗將數據以 圖示化方式表示,將該位置的變形量數值標示出來。若是只有參考變 形量的問題,從實驗數據可以發現,流量、壓力與變形量成正比,但 噴嘴的形式產生的變形量卻有另一方面的影響,因為同樣的流體壓力 以及流量,在使用不同的噴嘴形式,將會有不一樣的變形量產生,這 可使用流體產生應力的大小來思考。 關於矽晶片變型量的研究,將實驗分別做以下的說明: 將每壹形式的實驗做三次的測量以避免單次的誤差,因此所得數據再 以平均值計算其差值,而變形的方向以矽晶片中間位置為基準,做正 負號的區分,因此在計算上,必須使用最大值減最小值的即可取的該 次測量的最大變型量,而數值的計算使用以下的方式: A:測量三次之(最大值平均) – (最小值平均) (5) 上式將測量三次的最大峰值平均在減掉最小值的峰值平均,最小 值通常為負的數值。 B:測量三次之(最大值) – (最小值) (6)上式將測量三次之中產生的最大值減掉在三次中產生的最小 值,最小值通常為負的數值。
圖4. 2 雙對噴嘴變形量(流體壓力3.5kg/cm2)
圖4. 6 雙對65度噴嘴變形量(流體壓力5kg/cm2) 以上變形量之關係使用圖相表示更容易了解相互之間的關係,但 以科學的實驗過程,仍然必須將實驗數值量化並且評比,將不同的流 體壓力以及噴嘴形式做比較並置於同一表格判別優劣,每一組噴嘴各 有其優缺點,於比較結果所呈現之現象仍然取決於資料使用人的需 求。
圖 4. 7 流體壓力 3.5kg/cm2變形量比較表 測量三次之(最大值) – (最小值) 0 200 400 600 800 1000 1200 1400 0 1 2 3 4 5 6 7 位置 變形量 (μ m ) 單對噴嘴 雙對噴嘴 雙對噴嘴65度 測量三次之(最大值平均) – (最小值平均)
0
200
400
600
800
1000
1200
0
1
2
3
4
5
6
7
位置
變形量
(μm
)
單對噴嘴 雙對噴嘴 雙對噴嘴65度圖 4. 8 流體壓力 5kg/cm2變形量比較表 測量三次之(最大值) – (最小值) 0 200 400 600 800 1000 1200 1400 1600 0 1 2 3 4 5 6 7 位置 變形量( μm ) 單對噴嘴(5Kg/cm2) 雙對噴嘴(5Kg/cm2) 雙對噴嘴65度(5Kg/cm2) 測量三次之(最大值平均) – (最小值平均) 0 200 400 600 800 1000 1200 1400 0 1 2 3 4 5 6 7 位置 變形量 (μm ) 單對噴嘴(5Kg/cm2) 雙對噴嘴(5Kg/cm2) 雙對噴嘴65度(5Kg/cm2) 12
圖 4. 9 不同流體壓力變形量比較表 使用不同流體壓力比較測量三次之(最大值平均) – (最小值平均) 0 200 400 600 800 1000 1200 1400 0 1 2 3 4 5 6 7 位置 變形 量( μ m ) 單對噴嘴(5Kg/cm2) 單對噴嘴(3.5Kg/cm2) 雙對噴嘴(5Kg/cm2) 雙對噴嘴(3.5Kg/cm2) 雙對噴嘴65度(5Kg/cm2) 雙對噴嘴65度(3.5Kg/cm2) 使用不同流體壓力比較測量三次之(最大值) – (最小值) 0 200 400 600 800 1000 1200 1400 1600 0 1 2 3 4 5 6 7 位置 變形量( μm ) 單對噴嘴(5Kg/cm2) 單對噴嘴(3.5Kg/cm2) 雙對噴嘴(5Kg/cm2) 雙對噴嘴(3.5Kg/cm2) 雙對噴嘴65度(5Kg/cm2) 雙對噴嘴65度(3.5Kg/cm2)
4-2 加速度測量結果討論 加速度測量是考慮矽晶片使用更大的尺寸生產時,生產的過程是 否影響到產品的破壞強度,若是由實驗之結果可發現,加速度產生的 最大影響發生在矽晶片的邊緣,因此,若是要生產更大型之產品,可 以考量此實驗之結果。 而且由實驗結果的數據來撿視,振動產生的加速度產生的位置有 很明確的趨向,幾乎是呈現同一種的現象,也就是振動都是發生在矽 晶片的四個角落,而振動加速度最小的位置在矽晶片的中心位置,但 是在使用不一樣的流體壓力、流量以及噴嘴形式仍然會產生出許多不 一樣的結果,這部份仍然值得探討研究。
使用流體壓力3.5kg/cm2
實驗結果
圖4. 12 雙對角度噴嘴加速度(流體壓力3.5kg/cm2) 最大加速度(流體壓力3.5KG/CM2) 0 20 40 60 80 100 120 140 160 180 0 1 2 3 4 5 6 7 8 9 10 位置 最大加速度 ( m m /s ec 2) 單對噴嘴 雙對噴嘴 雙對65度噴嘴 圖4. 13 雙對角度噴嘴最大加速度(流體壓力3.5kg/cm2)
平均加速度((流體壓力3.5KG/CM2) 0 20 40 60 80 100 0 1 2 3 4 5 6 7 8 9 10 位置 最大 加速 度 (m m /s ec 2) 單對噴嘴 雙對噴嘴 雙對65度噴嘴 圖4. 14 雙對角度噴嘴平均加速度(流體壓力3.5kg/cm2) 最大振幅((流體壓力3.5KG/CM2) 0 10 20 30 40 50 60 70 80 0 1 2 3 4 5 6 7 8 9 10 位置 ( μ m ) 單對噴嘴 雙對噴嘴 雙對65度噴嘴 圖4. 15 雙對角度噴嘴最大振幅(流體壓力3.5kg/cm2 )
使用流體壓力5kg/cm2
實驗結果
圖4. 16 單對噴嘴加速度(流體壓力5kg/cm2)
圖4. 18 雙對角度噴嘴加速度(流體壓力5kg/cm2) 最大加速度(流體壓力5KG/CM2) 0 50 100 150 200 250 300 0 1 2 3 4 5 6 7 8 9 10 位置 最大加 速度 (m m /s ec 2) 單對噴嘴 雙對噴嘴 雙對65度噴嘴
平均加速度(流體壓力5KG/CM2) 0 20 40 60 80 100 0 1 2 3 4 5 6 7 8 9 10 位置 最大 加速 度 (m m /s ec 2) 單對噴嘴 雙對噴嘴 雙對65度噴嘴 圖4. 20 雙對角度噴嘴平均加速度(流體壓力5kg/cm2) 最大振幅(流體壓力5KG/CM2) 0 10 20 30 40 50 60 70 80 0 1 2 3 4 5 6 7 8 9 10 位置 (μ m ) 單對噴嘴 雙對噴嘴 雙對65度噴嘴 圖4. 21 雙對角度噴嘴最大振幅(流體壓力5kg/cm2)
不同流體壓力共同比對結果 最大加速度(不同流體壓力比較) 0 50 100 150 200 250 300 0 2 4 6 8 10 位置 (m/sec 2 ) 單對噴嘴5KG/cm2 雙對噴嘴5KG/cm2 單對噴嘴3.5KG 雙對噴嘴3.5KG 雙對65度噴嘴5KG/cm2 雙對65度噴嘴3.5KG 圖4. 22 最大加速度比較表 平均加速度(不同流體壓力比較) 0 10 20 30 40 50 60 70 80 90 0 1 2 3 4 5 6 7 8 9 10 位置 (m /s ec 2 ) 單對噴嘴5KG/cm2 雙對噴嘴5KG/cm2 單對噴嘴3.5KG 雙對噴嘴3.5KG 雙對65度噴嘴5KG/cm2 雙對65度噴嘴3.5KG 圖4. 23 平均加速度比較表
最大振幅(不同流體壓力比較) 0 10 20 30 40 50 60 70 80 0 1 2 3 4 5 6 7 8 9 10 位置 (μ m ) 單對噴嘴5KG/cm2 雙對噴嘴5KG/cm2 單對噴嘴3.5KG 雙對噴嘴3.5KG 雙對65度噴嘴5KG/cm2 雙對65度噴嘴3.5KG 圖4. 24 最大振幅比較表
表 4. 1 測量結果-1 流體壓力 3.5KG 形 式 最大振幅 (μm) 平均加速度 (m/sec2 ) 平均速度 (m/sec2 ) 最大速度 (m/sec2 ) 最大加速度 (m/sec2 ) 1 35 41.36 20.68 0.0708 141.60 2 22 23.83 11.96 0.0444 88.80 3 35 53.44 26.62 0.0708 141.60 4 25 29.98 14.99 0.0504 100.80 5 13 14.03 7.02 0.0264 52.80 6 21 25.46 12.73 0.0428 85.68 7 41 48.34 23.11 0.0828 165.60 8 27 29.03 13.88 0.0540 108.00 單對噴嘴 3.5KG 9 36 41.37 19.77 0.0720 144.00 10 21 29.36 12.52 0.0422 84.36 11 17 24.58 10.48 0.0342 68.40 12 23 21.05 11.19 0.0456 91.20 13 16 15.45 7.72 0.0319 63.84 14 7 7.99 3.99 0.0148 29.64 15 17 17.42 8.70 0.0342 68.40 16 23 22.75 11.37 0.0456 91.20 17 17 15.03 7.51 0.0331 66.12 雙對噴嘴 3.5KG 18 21 21.02 10.51 0.0422 84.36 19 7 7.68 3.84 0.0150 29.90 20 12 10.19 5.09 0.0230 46.00 21 10 8.35 4.18 0.0195 39.10 22 7 7.67 3.83 0.0149 29.90 23 3 3.73 1.86 0.0069 13.80 24 10 7.95 3.97 0.0195 39.10 25 9 7.61 3.80 0.0184 36.80 26 18 8.91 4.46 0.0357 71.30 雙對 65 度噴嘴 3.5KG 27 9 8.98 4.49 0.0184 36.80
表 4. 2 測量結果-2 流體壓力 5KG/cm2 形 式 位置 最大振幅 (μm) 平均加速度 (m/sec2 ) 平均速度 (m/sec2 ) 最大速度 (m/sec2 ) 最大加速度 (m/sec2 ) 1 59 63.64 31.82 0.1180 236.0 2 37 36.66 18.40 0.0740 148.0 3 59 82.22 40.95 0.1180 236.0 4 42 46.13 23.07 0.0840 168.0 5 22 21.59 10.79 0.0440 88.0 6 34 39.18 19.59 0.0680 136.0 7 69 71.10 35.55 0.1380 276.0 8 45 42.69 21.35 0.0900 180.0 單對噴嘴 5KG/cm2 9 60 60.84 30.42 0.1200 240.0 10 37 43.18 21.59 0.0740 148.0 11 30 36.14 18.07 0.0600 120.0 12 40 36.30 19.30 0.0720 144.0 13 28 26.63 13.32 0.0560 112.0 14 13 13.77 6.88 0.0260 52.0 15 30 30.03 15.00 0.0580 116.0 16 40 39.22 19.61 0.0800 160.0 17 29 25.91 12.95 0.0580 116.0 雙對噴嘴 5KG/cm2 18 37 36.24 18.12 0.0740 148.0 19 13 13.71 6.85 0.0260 52.0 20 20 18.19 9.10 0.0400 80.0 21 17 14.91 7.46 0.0340 68.0 22 13 13.69 6.84 0.0260 52.0 23 6 6.65 3.33 0.0120 24.0 24 17 14.19 7.10 0.0340 68.0 25 16 13.59 6.79 0.0320 64.0 26 31 15.92 7.96 0.0620 124.0 雙對 65 度噴嘴 5KG/cm2 27 16 16.04 8.02 0.0320 64.0
4-3 噴流分離高度與速度討論 探討矽晶片分離的時間主要是為了能增加生產的速度,若以現行 各個矽晶片製造廠所使用的速度約為3秒取走一次,目前仍然可行, 但是未來的需求是要邁向更快速的生產模式,那麼就必須要探討更好 的方式來因應此方案。 由變形量以及加速度的實驗中,得到許多與時間相關的數據,若 將實驗數據中的時間特性擷取出來並且加以分析,可發現此數據依循 著固定條件在變化,因此本章節主要探討噴流分離的時間與高度的數 據。 若是由(圖4.25)可發現,時間與高度的關係一直維持著正比例的 關係,所以可將兩個實驗數值一起探討分析,舉例以單對噴嘴搭配流 體壓力5KG/cm2來說明,在時間到達1秒時,矽晶片的高度已經不再變 化,原因是在時間到達1秒之前,氣流已經將晶片分離至最高位置, 所以此形式的噴嘴是本實驗中能夠最快分離的款式。
1000 1500 2000 2500 3000 3500 4000 4500 第1秒 第2秒 第3秒 時間(秒) 高度 (u m ) 單對噴嘴(5Kg/cm2) 雙對噴嘴(5Kg/cm2) 雙對噴嘴65度(5Kg/cm2) 單對噴嘴(3.5Kg/cm2) 雙對噴嘴(3.5Kg/cm2) 雙對噴嘴65度(3.5Kg/cm2) 圖4. 25 噴流分離高度與時間之關係圖
4-4 材料試驗結果探討 矽晶材料目前廣泛應用於電子產品製造,雖有參考資料可依循, 但矽晶片製造商生產方式之品質控管,仍然會照成產品的優劣差異, 因此本論文使用目前實驗之矽晶片材料做為研究對象。 本試驗施力的下壓速度極為緩慢,而在使用噴嘴分離的過程相當 快速,而且夾雜的晃動、變形、碰撞以及其它因素同時產生,因此材 料之數據可列為參考項目之一,以實驗結果來看,平均變形為量 7mm,若是在實際的噴嘴分離過程,矽晶片會破裂的值因該會小於這 個實驗數值,在使用以下材料試驗表時,還需多方考量各總因素。 表4. 3 矽晶片材料試驗表
負載與形變關係表 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.000 0.001 0.001 0.002 0.003 0.004 0.005 0.005 0.006 0.007 0.008 0.009 形變量(m) 負載( Kg ) 圖4. 26 負載與形變關係圖 1.材料試驗破壞變形量(主座標軸) 2.使用噴嘴變形量(副座標軸) 0 1000 2000 3000 4000 5000 6000 7000 8000 9000 次數 200 700 1200 1700 2200 2700 破壞點變形量 單對噴嘴(5Kg/cm2) 單對噴嘴(3.5Kg/cm2) 雙對噴嘴(5Kg/cm2) 雙對噴嘴(3.5Kg/cm2) 雙對噴嘴65度(5Kg/cm2) 雙對噴嘴65度(3.5Kg/cm2) 材料試驗 破壞變形量 (μm) 噴嘴變形量 (μm) 圖4. 27 噴嘴變形量與材料試驗破壞變形量關係圖

![圖 2.7 真空吸盤 流量感測計[4] (圖2.8)(表2,2) 用來測量噴嘴裝置的實際流量,此流量計有提供數位顯示器之功 能,使用單位是L/min,顯示單位可以到小數點後一位,流量計使用 時與噴嘴做串連在一起,在噴流開啟的同時一併測量流量。 圖 2.8 流量感測器 表 2.2 流量計使用規格表](https://thumb-ap.123doks.com/thumbv2/9libinfo/8147937.166978/32.892.173.735.371.1148/能使用單位是顯示單位可以後一位流量時與流開啟時一併測量格表.webp)