N. García-Pedrajas et al. (Eds.): IEA/AIE 2010, Part III, LNAI 6098, pp. 271–280, 2010. © Springer-Verlag Berlin Heidelberg 2010
Directed Graph Based Petri Nets Controller for
Rotatable Solar Panel in Integrated PHEV System
Jian-Long Kuo1, Kun Shian Su2, Jing-Hsiung Yang2, and Wen-Pao Chen2 1 Institute of Mechanical A.E. and System Information and Control, National Kaohsiung First
University of Sci. and Tech., Nan-Tze, Kaoh-Siung 811, Taiwan
2 Department of Electrical Engineering, National Kaohsiung University of Applied Sciences, Sanmin, Kaoh-Siung 807, Taiwan
JLKUO@CCMS.NKFUST.EDU.TW
Abstract. This paper proposes an intelligent dominant directed graph (DDG)
based Petri nets (PN) controller to increase the efficiency of the plug-in hybrid electric vehicle (PHEV) by using rotatable solar panel. Conventionally, the PHEV with solar panel has a critical problem of putting on the roof of a PHEV. Since the limited space on the roof of the vehicle is not large enough. Rotatable structure is considered to track the sunlight by intelligent dominant directed graph based Petri nets controller. The mechanical maximum power point tracking (MPPT) function can be achieved. A stepping motor is used to control the rotating angle of the rotating solar panel. With the composite mechanical MPPT with DDG+PN control algorithms, the maximum power in a limited roof space of the vehicle is possible. The solar panel has not to be very large. This increases the efficiency of the PHEV. It is convinced that the proposed DDG+PN MPPT algorithms are applicable to the PHEV system.
Keywords: Dominant directed graph(DDG), Petri nets (PN), Maximum power
point tracking (MPPT), Plug-in hybrid electric vehicle (PHEV).
1 Introduction
1.1 Plug-In Hybrid Electric Vehicle
The electric vehicle (EV) becomes more and more important in our real life due to the energy saving and carbon reduction issue. Among, various many EVs, The plug-in hybrid electric vehicle (PHEV) is a hybrid vehicle with an integrated mechatronic system and also with batteries that can be recharged by connecting a plug to an electric power source. The PHEV has the characteristics of both hybrid electric vehicles and battery electric vehicles.
There are an electric motor and internal combustion engine (ICE) in the hybrid EV system. There is a plug for the EV to connect to the electric grid. The cost for electricity to power plug-in hybrid EV for all-electric operation has been estimated at less than one quarter of the cost of gasoline [1]-[9]. As compared to conventional
272 J.-L. Kuo et al.
vehicles, PHEV can reduce the problem of air pollution, dependency on petroleum, and greenhouse gas emissions that contribute to global warming [2][3][4].
There is great potential for the PHEV. It is more efficient than conventional hybrids. [5]. By controlling the PHEV's ICE, the engine can keep its maximum efficiency all the time. A PHEV is likely to convert to motive energy on average at about 30% efficiency. The engine of a PHEV would be likely to operate far more often near its peak efficiency. The batteries can serve the modest power needs at times when the ICE would be forced to run well below its peak efficiency. The actual efficient achieved depends on losses from electricity generation, inversion, battery charging/discharging, the motor controller and motor itself, the way a vehicle is used, and the opportunity to recharge by connecting to the electric grid.
1.2 Directed Graph
Basically, the dominant directed graph (DDG) is a graph theory. It is used to determine the winner in a tournament. The winner represents the maximum solar power value in this problem. The teams in a tournament represent a series of sampling signals to calculate the dynamic time-varying solar power value. Eight sampling signals are sampled from the A/D converter. Eight teams represent the eight sampling signals.
Therefore, the maximum solar power value can be determined. The directed graph has the benefit of graphical representation which can provide better understanding for the designer. The eight signals in the eight directions are sampled sequentially. Therefore, the sampling is time-dependent and keeps changing all the time.
1.3 Petri Nets
For the discrete distributed systems, Petri nets method is a good method to describe the dynamics [10]-[16]. Petri nets method is used to implement an intelligent logic controller in a rotatable solar panel system. The Petri nets approach is a very popular technique for digital control system in recent years. Since the tremendous programmable logic design for the system integration, the Petri nets approach provides a systematic matrix approach to handle the synchronization problem for logic control. When considering a large sys-tem, the conventional logic design is usually quite complicated. The programming of an intelligent logic controller is designed by using C language.
2 Structure of Proposed PHEV System
This paper proposes an intelligent composite DDG Petri nets controller to control the solar cell panel putting on the roof of the vehicle. The DDG is the first step algorithm, and the Petri nets is the second algorithm. Both of them are intelligent control algorithms. With the intelligent composite controller, the mechanically maximum power point tracking can be achieved.
For a series of continuous solar power values sensing from the voltage and current sensors, the strength of the solar power is sensed into A/D of MCU, the solar power value is calculated. There are totally eight sensors in the eight directions. In other
words, there are eight teams in a tournament. Many rounds of the tournaments are going continuously due to continuous sampling data from A/D of MCU.
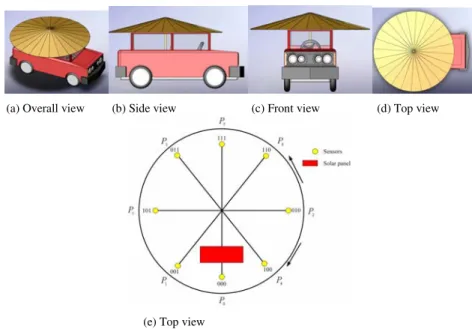
The major new design concept is the rotatable solar panel above the vehicle as shon in fig 1(a). The rotatable solar panel is put on the roof of the vehicle. Since the vehicle is possible to move in any directions, the rotating structure is considered here to track the sunlight by mechanical approach. By defining eight directions on the roof of the vehicle, the Petri nets based control is used to track the eight directions when the vehicle is going. The eight directions are coded in a special number sequence as denoted in Fig. 1(b). With the special number sequence, the output matrix in the Petri nets method can be equal to an identity matrix. This makes the Petri nets formulation easier.
By defining the appropriate system matrices, the controller can be implemented by using intelligent DDG+PN algorithms in embedded C language as shown in Fig. 2(a).
3 Directed Graph Formulation
3.1 Directed Graphs
A directed graph or digraph is a pair defined as
G
=
(
V
,
A
)
with the following defini-tion [17]-[20]:A set
V
is defined whose elements are called vertices or nodes. A setA
is defined including ordered pairs of vertices, called arcs, directed edges, or arrows. There is difference as compared to an ordinary or undirected graph. The directed graph is defined in terms of edges, which are unordered pairs of vertices.(a) Overall view (b) Side view (c) Front view (d) Top view
(e) Top view
Fig. 1. (a)-(d) Three-dimensional view of the intelligent PHEV system. (e) Definition of eight
274 J.-L. Kuo et al.
3.2 Dominant-Directed Graphs
There is a definite dominance relation between any two members of the group. For given any two individuals A and B, either A dominates B or B dominates A, but not both. The directed graph can describe the same fact in the same way. The rela-tion
P
i→
P
j meansP
i dominancesP
j, this means that for all different pairs, eitherj i
P
P
→
orP
j→
P
i, but not both. In general, the following fact is defined.Definition: A dominant-directed graph is a directed graph such that for any different
pair of vertices
P
i andP
j, eitherP
i→
P
jorP
j→
P
i, but not both. The directed graph can be applied onto a league with n sports team. They play each other exactly one time, as in one round of a round-robin tournament in which no ties are allowed. The relationP
i→
P
j means that teamP
i beat teamP
j in their single match. The definition of a dominant-directed group is satisfied. Therefore, dominant directed graphs are sometime called tournaments.Theorem: In any dominance-directed graph, there is at least one vertex from which
there is a 1-step or 2-step connection to any other vertex. A vertex with the largest total number of 1-step and 2-step connections to other vertices has the above property stated in the theorem. There is a simple way to find such vertices using the vertex matrix M and its square matrix
M
2. The sum of the entries in the i-th row of M is the total number of 1-step connections fromP
i to other vertices.Besides, the sum of the entries of the i-th row of
M
2 is the total number of 2-step connections fromP
ito other vertices. Therefore, the sum of the entries of the i-th row of the matrixA
=
M
+
M
2 is total number of 1-step and 2-step connections fromi
P
to other vertices. That means that a row ofA
=
M
+
M
2 with the largest row sum specifies a vertex having the property stated in the above theorem. Therefore, a vertex with the largest number of 1-step and 2-step connections to other vertices can be further called a “powerful” vertex. This concept can be concluded as the following definition.Definition: The potential value of the vertex of a dominance-directed graph is the
total number of 1-step and 2-step connections from it to other vertices. Alter natively, the potential value of a vertex ..Pi is the sum of the entries of .the i-th row of the
ma-trix A= M + M2, where M is the vertex matrix of the directed graph.
4 Rotatable Solar Panel Control by Using Petri Nets Method
The dynamics of the logic design can be easily described by Petri nets method. The method is based on binary codes. The basic elements include two elements: the place station (noted as pi) and the transition station (noted as ti). The arrow indicates the input and output operation for the transition station. The place station can be a
References
1. Frank, A.: What are Plug-In Hybrids? Team Fate. University of California, Davis (re-trieved August 7, 2007)
2. Archer, D.: Fate of fossil fuel CO2 in geologic time. Journal of Geophysical Research 110, C9: C09S05.1– C09S05.6 (2008), doi:10.1029/ 2004JC 002625
3. Boschert, S.: Plug-in Hybrids: The Cars that Will Recharge America. New Society Pub-lishers, Gabriola Island
4. Friedman, T.: Hot, Flat, and Crowded: Why We Need a Green Revolution–and How It Can Renew America. Farrar, Straus & Giroux, New York (2008)
5. Gonder, J., Markel, T.: Energy Management Strategies for Plug-In Hybrid Electric Vehi-cles, technical report NREL/CP-540-40970 presented at SAE World Congress, Detroit, Michigan (2007)
6. Chau, K.T., Chan, C.C., Liu, C.: Overview of Permanent-Magnet Brushless Drives for Electric and Hybrid Electric Vehicles. IEEE Transactions on Industrial Electronics 55(6), 2246–2257 (2008)
7. Lukic, S.M., Cao, J., Bansal, R.C., Rodriguez, F., Emadi, A.: Energy Storage Systems for Automotive Applications. IEEE Transactions on Industrial Electronics 55(6), 2258–2267 (2008)
8. Emadi, A., Lee, Y.J., Rajashekara, K.: Power Electronics and Motor Drives in Electric, Hybrid Electric, and Plug-In Hybrid Electric Vehicles. IEEE Transactions on Industrial Electronics 55(6), 2237–2245 (2008)
9. Haddoun, A., El Hachemi Benbouzid, M., Diallo, D., Abdessemed, R., Ghouili, J., Srairi, K.: Modeling, Analysis, and Neural Network Control of an EV Electrical Differential. IEEE Transactions on Industrial Electronics 55(6), 2286–2294 (2008)
10. Peterson, J.L.: Petri nets. ACM Computing Surveys 9(3), 223–252 (1977)
11. Peterson, J.L.: Petri net theory and the modeling of systems. Prentice-Hall, Englewood Cliffs (1981)
12. Lee, J.S.: A Petri Net Design of Command Filters for Semiautonomous Mobile Sensor Networks. IEEE Transactions on Industrial Electronics 55(4), 1835–1841 (2008)
13. Lee, J.S., Zhou, M.C., Hsu, P.L.: An application of Petri nets to supervisory control for human-computer interactive systems. IEEE Transactions on Industrial Electronics 52(5), 1220–1226 (2005)
14. Zurawski, R.: Petri net models, functional abstractions, and reduction techniques: applica-tions to the design of automated manufacturing systems. IEEE Transacapplica-tions on Industrial Electronics 52(2), 595–609 (2005)
15. Wai, R.J., Chu, C.C.: Motion Control of Linear Induction Motor via Petri Fuzzy Neural Network. IEEE Transactions on Industrial Electronics 54(1), 281–295 (2007)
16. Wai, R.J., Chu, C.C.: Robust Petri Fuzzy-Neural-Network Control for Linear Induction Motor Drive. IEEE Transactions on Industrial Electronics 54(1), 177–189 (2007)
17. Bang, J., Gutin, G.: Digraphs: Theory, Algorithms and Applications. Springer, Heidelberg (2000)
18. Bondy, J.A., Murthy, U.S.R.: Graph Theory with Applications. North-Holland, Amster-dam (1976)
19. Diestel, R.: Graph Theory, 3rd edn. Springer, Heidelberg (2005)
20. Harary, F., Norman, R.Z., Cartwright, D.: Structural Models: An Introduction to the The-ory of Directed Graphs. Wiley, New York (1965)