執行機關(計畫)識別碼:130301e200
行政院農業委員會林務局102年度科技計畫研究報告
計畫名稱:
高解析度航遙測影像於崩塌地多維資訊自動
萃取與資料庫建置(2/3)
(第2年/全程3年)
(英文名稱)
Automatic Extraction of Multi-dimension
Information and Database Establishment
for Landslide Area by High-resolution
Aerial Imagery (2/3)
計畫編號:
102農科-13.3.1-務-e2
全程計畫期間: 自 101年3月22日 至 103年12月31日
本年計畫期間: 自 102年3月5日 至 102年12月15日
計畫主持人:
詹進發
研究人員:
邵怡誠
執行機關:
政治大學
能造成的損失。本計畫使用農航所高解析度之航遙測影像資料,以及現有之航測製 圖軟硬體設備,藉由開發或整合現有軟硬體,研發快速萃取多維度崩塌地資訊之技 術,並建置多時期崩塌地資料庫。期能提供高品質之崩塌地資訊,以輔助防災、減 災、救災與崩塌地復育之決策分析。本計畫全程三年:第一年工作為關聯航攝影像 與崩塌地圖資,並萃取試驗區崩塌地基礎資料。第二年工作為產製崩塌區地形資料 ,並建置崩塌地多維資訊,以輔助崩塌區之變遷分析。第三年完成建置崩塌地多維 資訊自動萃取系統,以及崩塌地多維資訊資料庫與監測系統。 二、執行成果英文摘要:
Being located in a seismic zone, the geology is fragile in Taiwan. Landslides, floods and other disasters induced by typhoon occur frequently. For land conservation, long-term monitoring of landslides is necessary in order to avoid or reduce the losses caused by disasters. This project employs high resolution aerial imagery acquired by Z/I DMC and Leica ADS40, and the existing mapping software and hardware used in Aerial Survey Office, to develop a technique for rapidly extracting multi-dimensional information of landslide, and to build a multi-temporal landslide database. It is expected that the outcome of this project can provide high-quality landslide information to support decision making on disaster prevention and mitigation, as well as restoration of landslide areas. This is a three-year project. The task in the first year is to associate aerial imagery and landslide maps, as well as to collect and to extract the basic landslide data of test areas. In the second year, it is aimed to produce landslide terrain data and to build the initial multi-dimensional landslide database in order to facilitate change analysis on landslide areas. In the third year, this project will build a system for automatically extracting landslide information, as well as a multi-dimensional database and a monitoring system for landslide.
三、計畫目的:
本(102)年度計畫將以林務局屏東林區管理處旗山事業區為研究區域(圖2),達到 下列工作目標。
A. 開發多時期影像對位與資料基準轉換系統,提供半自動及全自動方位控制與計算 ,以提升後續資料產製之效率。
1. (1) (2) (3) 多維資料庫雛形之建置。 D. 研究崩塌地變遷分析方法與作業程序,完成多維度資訊輔助崩塌地變遷分析雛形 。 四、重要工作項目及實施方法: 由於農航所現有之航照影像包括數種不同格式,影像處理程序與使用的軟體亦不盡 相同,因此本計畫將根據不同航攝影像之處理方式分別開發軟體,以完成各項先期 試驗,研究方法說明如後。 DMC航照原始影像對位 DMC成像幾何與波段 DMC與傳統框幅式相機(frame camera)相同,為中心透視投影,中間四個鏡頭 每曝光一次可記錄四張7168 x 4096大小之全色(panchromatic)原始影像,四 張影像可合組成一張解析度為13824 x 7680的全色影像。外圍左右各兩個鏡頭 共四個鏡頭,每曝光一次可記錄四張3072 x 2048大小之多光譜 (multispectral)原始影像,分別記錄12 bit之紅光、綠光、藍光、紅外線影 像,多光譜影像與全色影像套疊如圖3所示。 DMC影像產品 DMC每曝光一次可記錄四張全色(panchromatic)原始影像及四張多光譜 (multispectral)原始影像,由此八張原始影像經由後處理軟體PPS (Post Processing Software) 可以產生各種不同組合之產品,ADS與DMC影像之光譜 範圍如表1所示。
DMC影像產品
DMC為中心透視投影,當相機曝光的一瞬間,相機會送出一個event訊號給 POSAV (position and orientation system airborne vehicles )的
GPS,GPS會記錄此一瞬間之時間供後處理內插曝光點使用。DMC航空照片之投 影方式為透視投影(perspective projection),欲藉助航照外方位參數與數值 地形模型,並搭配向量圖徵進行反投影處理,其間牽涉之理論主要為共線條件 (collinearity condition),即地面點位坐標、相應之影像像元點位坐標,以 及曝光位置等三點,在空間上應該位於同一直線上,如圖4 (何維信,1995)。 式中( )為像空間坐標,( )為分別為像主點改正坐標值與相機焦距 ;(X,Y,Z)為物點坐標,m11~m33為旋轉矩陣M各元素,分別為飛機飛行當時對 上述X、Y、Z三個軸旋轉之旋轉量,可求得M矩陣各元素(何維信,1995)。像空 間坐標則可透過仿射轉換(affine transformation),再轉算為影像坐標,進 行各種反投影後之影像處理。 反投影解算過程所需之資料包括:欲投影之向量圖徵點位資料、數值地形模型 、航照影像之內、外方位參數等。其中,同一航照相機之內方位固定,與影像 之對位關係變化有限,可將對應關係視為相同;另農航所自購入GPS/INS輔助
(4) 2. (1) (2) (3) 。 DMC成果之基準轉換 對於不同時期或不同坐標基準所產生的DMC製圖成果,須經過三維空間的坐標 轉換,以獲得一致的坐標基準。當局部區域有相同點位可作為轉換控制點時 ,在不考慮網形變形的理想情況下,只需要七參數即可作任何三度空間座標的 正交轉換,此七參數包括一個尺度參數S,三個平移參數ΔX、ΔY、ΔZ,及三 個旋轉參數εx、εy、εz。較常使用的模式有 Bursa-Wolf模式和 Molodensky-Badekas 模式。 對於直接使用POS資料計算與經空三平差計算後所造成成果的不同基準,因為 本案將在資料庫中註記偵測之崩塌區所使用像片編號,因此可利用依該像片上 之已量測之點位作為控制點,依前述正交轉換模式,解算二者間的關係,再將 先前成果資料轉換至空三平差後之坐標基準。 ADS航照原始影像對位 ADS成像幾何與波段 ADS 採用三線式推掃(pushbroom)方式成像,在單線上為中心透視投影,因航 帶掃描成像時各線影像是單獨各自成像,所以航帶影像是為半中心透視投影。 ADS在前傾(forward)、垂直(nadir)、後傾(backward)角度各有一條全色之 12000像元之CCD (Charge Coupled Device)掃描線,在垂直角度的位置另有一 條錯開半個像元(3.25μm)之CCD掃描線,可提升地面解析力。另外在垂直、後 傾角度各配備一組四色分光鏡,可使得同一光束被分成藍光、綠光、紅光與近 紅外光之四個光譜波段,因此四個光譜波段具有相同的入光位置,且其解析度 皆為12000像元,輻射解析度(radiometric resolution)為12 bit (圖5)。 ADS影像產品
L0影像為ADS之原始影像,由軟體GPro/XPro產製的各項產品如L1或L2,皆是處 理自L0影像。ADS影像掃描時會同時產生方位參數ODF檔(Orientation Data File, ODF)及相機參考CAM檔(Camera Calibration File, CAM)。ODF檔為L0之 外方位資料檔,此外方位參數為飛行時,依各條掃描線(scan line)之攝影時 間內插GPS/INS之觀測量所得,同步紀錄各條掃描線之外方位參數。CAM檔為相 機參數檔,內容記錄相機焦距及掃描線上各像元轉換到像面(focal plane)坐 標之資料。 L0影像雖然帶有方位,但是由於飛機運動及姿態之改變,造成影像扭曲。因此 L1之影像試圖糾正影像到一固定高度之平面來改正由飛機抖動造成的影像變形 。此糾正過程會重新取樣並旋轉影像到共核線上以利立體觀測。L0影像及糾正 後之L1影像如圖6所示。 ADS影像對位 由於ADS40影像為推掃式成像,因此所形成的影像為一帶狀影像,其長度跟飛 行的距離有關,飛得越長,則影像也越長。如果使用者只需要某一區域的影像 進行立體觀測或自動DTM匹配,並無法如片幅式影像僅抽取所需的影像。因此 必須先產生L1影像,且開發一個切割L1影像的工具,讓使用者根據需求切出 L1影像,之後再利用L1影像去進行對位或DTM匹配作業。
(4)
3. (1)
(2)
ODF)及相機參考CAM檔(Camera Calibration File, CAM),並配合當地已有或 新匹配之DTM資料,則能經由共線式的計算獲得L2影像,即能與其他相機或其 他時期拍攝的影像進行對應定位作業,並可供校正相應產生之原始數值地形資 料。 ADS成果之基準轉換 因ADS成果資料的基準轉換原則上與DMC之作法相同,但差別在於ADS影像是推 掃式成像,各掃描線之方位略有微小差異,且隨距離差異而變動不一,因此本 案預計依空三平差後之成果,取固定掃描線區間之點位進行正形轉換,中間區 域則內插計算,用以轉換崩塌區之坐標基準。 多維度崩塌地自動分類判釋 原始影像崩塌地資訊萃取 對ADS影像而言,本項工作需讀取L0影像之相關的ODF檔(Orientation Data File, ODF)及CAM檔(Camera Calibration File, CAM),並配合當地之DEM資料 ,方能將既有崩塌地圖資對應至L0影像。 ODF檔為L0之外方位資料檔,此外方位參數為飛行時,依各條掃描線(scan line)之攝影時間內插GPS/INS之觀測量所得,同步紀錄各條掃描線之外方位參 數。CAM檔為相機參數檔,內容記錄相機焦距及掃描線上各像元轉換到像面 (focal plane)坐標之資料。 雖然可使用上述資料由地面坐標計算至影像坐標,定義影像面上的崩塌地區 ,但地面的的直線在L0影像上通常不會亦呈直線,也就是說地面的多邊形在 L0影像上將為不規則形,因此不利崩塌地區各端點之地面坐標直接定義影像面 上的區域。但未進行空三平差前,僅憑單張的L0影像,亦無法直接建立由影像 坐標至地面坐標的投影關係,因此需搭配DEM資料提供地面高程,利用共線式 解算地面平面(X, Y)坐標至影像面的位置。 DMC影像在崩塌地影像資訊之萃取較為單純,本項工作需讀取崩塌地圖資之 Shapefile檔案,利用Shapefile中之面狀向量圖徵之二維點位坐標,配合 40m或20m密度之數值地形模型,內插解算向量圖徵點位之三維坐標,然後將向 量圖徵之點位,投影至不具overview之DMC TIFF格式航照影像檔上,便可萃取 崩塌地影像資訊。 崩塌地自動分類判釋 藉由前述之崩塌地影像資訊萃取方法,可取得既有崩塌地圖資與原始影像之物 像空間關聯,搭配遙測影像分類方法,可偵測崩塌地之範圍,並可將分類結果 轉換為Shapefile及計算崩塌地之面積。若僅使用影像光譜資訊進行分類,因 崩塌地與裸露地之光譜特徵類似,其結果可能會有誤判情形,利用既有圖資反 投影至原始影像,可精確將崩塌地範圍定位,由原始影像萃取之崩塌地影像可 分析其光譜特徵,對於找出新的崩塌地應有幫助,若輔以數值地形高程資訊作 為影像分類的參數,將可有效提升影像分類之精度。此外,此方法可自動化進 行,因此可將既有圖資批次處理,將歷史影像逐一分類,便可產製多維度、多 時期崩塌地資訊,進行多維變遷量化估算。 由於ADS40和DMC影像的空間解像力極高,傳統逐像元的影像分類方法容易造成
A. B. C. D. 4. 前處理,接著對前處理後的影像依同質性分割成不同的區塊,並將分割後的影 像分類,最後評估分類後的精度,詳細說明如下: 影像前處理 在航照影像上以其紋理、植被和形狀特徵為依據產生不同指標的影像,這些 指標可供判釋崩塌地可能坐落的區塊。通常崩塌地的紋理之同質性較其他地 物來的高,因此可以將整張影像中同質性偏低的地區過濾掉,除此之外,崩 塌地在影像上其植被覆蓋的區域面積小甚至沒有,因此可以在影像中將植被 指數中高的區域過濾掉,並且崩塌地在影像上的形狀不似人工建物般呈現規 則的形狀,其碎形指數較人工建物高,也可據以將影像中形狀較規則的區域 過濾掉。 影像分割
本研究將利用區域成長法(region growing)或集水區法(basin detection)分 割影像,區域成長法乃是以像元和像元之間的光譜反射值之差異作為分割區 塊的依據,若大於一定的門檻值,則分割成不同的區塊,反之則不將其分割 。而集水區法乃是找出影像上物體邊界的位置,並將其邊界所圍繞範圍內的 像元當作是一個區塊。區域成長法之影像分割的成果如圖8所表示,可以明顯 看出在不同的區塊其光譜反射值差異大,因此在自動分割時會分割成不同區 域。 影像分類 可採用逐像元的分類方法或是物件導向(object-oriented)的方法對影像進行 監督式、非監督式和混合式的分類。逐像元的方法是以像元為最小單元分類 影像,而物件導向的方法則是以影像分割後的區塊作為最小單元。影像分類 時若採用監督式分類則必須選取訓練樣本,而採用非監督式分類不用選取訓 練樣本,混合的分類方式為先採用非監督式分類再進行監督式分類以提高分 類精度。逐像元的監督式分類成果如圖9所示,其分類的演算法為最大概似法 ,共分類出三個類別,分別為海水、沙灘和植被地區;而以物件導向之監督 式分類成果如圖10所表示,其分類的演算法為貝式統計法,成果為沙灘的分 類區域。 分類精度評估 影像分類的成果之資料格式有網格資料型態和向量資料型態,可利用此兩種 型態的資料和原始影像套疊以評估分類精度,其方法為在影像區域內隨機產 生一定數量的點位,依據分類出來的結果給予該點位類別屬性,並檢驗和原 始影像是否符合,以評估其分類精度。圖11為以像元為基礎之分類方式獲得 的沙灘地之網格資料;圖12為以物件導向之分類方式獲得的沙灘地之網格資 料分類結果;圖13為以像元為基礎之分類方式獲得的向量資料;圖14為以物 件導向之分類方式獲得的向量資料。可以明顯看出不論是網格資料或是向量 資料,利用物件導向之分類方式所得到的精度較以像元為基礎的分類方式高 。 建置崩塌地判釋分析之基礎資料庫 本計畫將配合農航所完成測試區崩塌地基礎資料之蒐集、補充及分析,崩塌地基
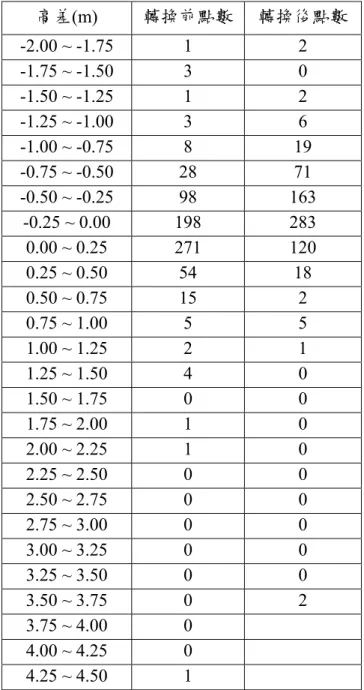
在崩塌地資料庫建置方面,本研究將蒐集國內外有關崩塌地資料庫建置之參考資 料,包括:經濟部中央地質調查所、美國地質調查局(United States Geological Survey, USGS)、林務局等相關單位的崩塌地既有資料庫模型,參酌現有之崩塌地 分類方式,並參照國土資訊系統之資料標準,研擬崩塌地資料庫及屬性資料規格 ,以便用於建置試驗區崩塌地多維資料庫雛形。資料庫建置將採用國內通用之 Shapefile格式儲存向量資料,並配合農航所既有軟體以ERDAS之LAN或IMG格式儲 存網格資料,有鑑於崩塌地之多維度資料庫將十分龐大,將以ESRI ArcGIS Geodatabase資料模型儲存本計畫所建置之圖資。 五、結果與討論: 本計畫已完成本年度之工作項目,研究子題包括:多期原始航攝影像對位及衍生資 訊之基準校正、原始航攝影像萃取地形及光譜資訊、崩塌地變遷之分析模式、崩塌 地多維資料庫雛型建置等,執行過程之主要結論與檢討建議說明如下:。 1. 本計畫提出之分層萃取崩塌地方法,先將雲層覆蓋區萃取出,然後依據影像光譜 亮度統計值將影像區分為三類:陰暗地區、正常地區、較亮地區,然後分別建立崩 塌地萃取準則於三種分區萃取出崩塌地,研究結果顯示,此方法比使用單一準則萃 取全影像之崩塌地更為精確。 2. 影像對位及高程轉換過程中均發現有些成果有誤差太大的現象,利用光線追蹤法 由影像坐標轉換為地圖坐標也存在1~3公尺的誤差,可能是DEM建置時間與影像獲取 時間差距太大而導致。 3. 本計畫已設計程式,可將二階段崩塌地自動化萃取流程之輸出成果套疊於原始影 像進行檢核,這對於評估崩塌地萃取成果是否正確頗有幫助,待萃取成果編修之機 制確定後,可進一步開發程式工具以應用於作業程序。 4. 本計畫選擇以開放原始碼的物件關聯式資料庫PostgreSQL儲存崩塌地資料,並統 一定義資料庫內崩塌地資料之屬性欄位項目,將通過檢核或編修後的第二階段崩塌 地向量檔依航拍任務合併,並加入標準的屬性欄位後,便可匯入資料庫。此資料庫 可供ArcGIS或QGIS使用,亦可作為WebGIS5之資料庫,在資料管理與應用上更具彈性 。 5. 為便於不同分析範圍內的崩塌地變遷分析,本計畫在崩塌地萃取完成之後,自動 在崩塌地資料的屬性表內加入坐落分區(如事業區、行政區、林班地、集水區等常見 的分析範圍類別)欄位,並設計圖形化使用者介面,使用者可由欄位值建立SQL查詢 指令,可大幅提高分析效率。
份已測試成功。至於ADS40影像部份,目前處理ADS40影像的專用軟體區分有舊版的 GPro與新版 XPro,這二套軟體產生的L0影像檔案系統有所差異,產生L1影像的程式 與參數檔亦不相同。對本案而言,GPro的檔案系統適合開發程式處理L0影像,而 XPro程式則能有效批次產生L1影像。基於農航所現行作業主要仍使用GPro,因此本 案暫以GPro為基礎去開發程式模組。日後待作業程序以XPro為主時,再行開發相關 的程式模組。 2.本計畫已對本年度之工作項目進行研究,並已有初步的成果。經評估eCognition 軟體批次處理的功能頗適合本案處理大量資料之需求,但是在處理大量資料時,仍 有效率不彰的問題,基於「影像分割與分類處理效率」與「待分析物件(崩塌地)之 尺度」,建議採用2公尺解析度影像進行分析,本研究已設計程式,可供從DMC原始 影像自動萃取2公尺解析度影像。 七、參考文獻: 王美惠,2008,應用SPOT衛星影像及GIS於崩塌地潛感分析之研究-以稍來溪為例 ,朝陽科技大學營建工程系碩士論文。 何維信,1995,航空攝影測量學,國立編譯館。 洪凱政,2009,應用多光譜影像多種特徵偵測崩塌地之研究,國立成功大學測量及 空間資訊學系碩士論文。 張立雨、陳繼藩、陳哲俊、林欣穎,2007,「應用影像分割技術與碎形理論於福衛 二號Quick-Look 影像之雲覆蓋萃取」,『航測及遙測學刊』,12(3):273-281。 陳良健、徐啟崇,1999,「多波段影像分析於灘線萃取之研究」,『航測及遙測學 刊』,4(3):17-30。 陳良健、張智安,2003,「高解析力衛星影像之幾何處理」,『國土資訊系統通訊 第45期 - 遙測與地理資訊系統之結合』。 湯美華,2006,空載光達點雲及地形圖輔助生產真實正射影像之研究,國立成功大 學測量及空間資訊學系碩士論文。 雷祖強、李哲源、葉惠中、萬絢,2009,「以區塊物件分類法萃取ADS-40影像中水 稻田丘塊資訊之研究」,『航測及遙測學刊』,14(2):127-140。 農 林 航 空 測 量 所 ,2012,http://www.afasi.gov.tw/ct.asp?xItem=58582&CtNode=6139&mp=390。 黃韋凱、林銘郎、陳良健、林彥享、蕭震洋,2010,「物件導向分析方法應用於遙 測影像之分區及崩塌地與人工設施分類」,『航測及遙測學刊』,15(1):29-49。 葉堃生、李茂園、王韻皓,2010,「航攝數位影像於防救災工作上之應用」,『航 測及遙測學刊』,15(1):123-140。
鄭雅文、史天元、蕭國鑫,2008,「物件導向分類於高解析度影像自動判釋」,『 航測及遙測學刊』,13(4):273-284。 劉守恆,2002,衛星影像於崩塌地自動分類組合之研究,國立成功大學地球科學系 博士論文。 劉治中、蕭國鑫、饒見有、劉進金、吳哲榮、黃群修,2010,「結合空載 LiDAR 與 彩色航照應用於崩塌地研判」,『航測及遙測學刊』,15(1):111-122。 蕭國鑫、劉進金、陳大科、徐偉城、何心瑜,2007,「多時影像與空載光達資料應 用於地形變遷研究~以外傘頂沙洲為例」,『航測及遙測學刊』,12(4):419-429。 A d o b e , 1 9 9 2 , T I F F , R e v i s i o n 6 . 0 , F i n a l – 1 9 9 2 / 0 6 / 0 3 , h t t p : / / p a r t n e r s . a d o b e . c o m / p u b l i c / d e v e l o p e r / e n / t i f f / T I F F 6 . p d f . Blaschke, T., 2010. Object based image analysis for remote sensing, ISPRS Journal of Photogrammetry and Remote Sensing, 65:2-16.
Carleer, A., Debeir, O., and Wolff, E., 2004, Comparison of very high spatial resolution satellite image segmentations, Proceedings of SPIE Image and Signal Processing for Remote Sensing IX, Vol. 5238, ed. Lorenzo Buzzone, pp. 532-542.
ESRI, 1998, ESRI Shapefile Technical Description, An ESRI White Paper, http://dl.maptools.org/dl/shapelib/shapefile.pdf.Gruen, A., Zhang L., 2003. Automatic DTM Generation from TLS data. Optical 3-D Measurement Techniques VI, Vol. I, Zurich, pp. 93-105.
Green, K and Lopez, G., 2007, Using Object-Oriented Classification of ADS40 Data to Map the Benthic Habitats of the State of Texas, PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING, Vol. 73, No. 8, pp.861-868.
Hinz, A., C. Dörstel, and H. Heier, 2001, DMC – The Digital Sensor Technology of Z/I-Imaging, in: Fritsch, D., and R. Spiller (Eds.), Photogrammetric Week 2001, Wichmann, Heidelberg, pp. 93-103.
Hudak, A.T., Lefsky, M.A., Cohen, W.B., and Berterretche, M., 2002. Integration of lidar and Landsat ETM+ data for estimating and mapping forest canopy height, Remote Sensing of Environment, 82:397-416. Jensen, J.R., 2007. Remote Sensing of the Environment. (2nd ed.): Prentice
Hall.
Lefsky, M.A., Harding, D., Cohen, W.B., Parker, G., and Shugart, H.H., 1999. Surface lidar remote sensing of basal area and biomass in deciduous forests of eastern Maryland, USA., Remote Sensing of Environment,
67:83-Lei, R., Fan, D., Ji, S., and Zhai, H., 2008, THEORY AND ALGORITHMS OF DSM GENERATION FROM MULTI-LINE-ARRAY IMAGES MATCHING, The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. Vol. XXXVII. Part B4. Beijing, pp.337-342.
Leica Geosystems, 2001, ADS40 Airborne Digital Sensor brochure,
f t p : / / g i s . l e i c a
- geosystems.com/outgoing/for%20Jim%20Jensen/Attachment%2023%20-%20ADS40%20Brochure.pdf
L e i c a G e o s y s t e m s , 2 0 0 6 , A D S 4 0 D a t a s h e e t , h t t p : / / w w w . l e i c a -g e o s y s t e m s . c o m . c n / b r o c h u r e / A D S 4 0 _ D a t a s h e e t . p d f
Leica Geosystems, 2008, Leica ADS40 Ground Processing Software GPro User M a n u a l , h t t p : / / w w w . l e i c a -geosystems.com/downloads123/zz/airborne/gpro/manuals/GPro_Documentation.p df
Lillesand, T.M, Kiefer, R.W., 2008. Remote sensing and image interpretation, John Wiley & Sons.
Lim, K., Treitz, P., Wulder, M., St-Onge, B., and Flood, M., 2003. Lidar remote sensing of forest structure, Progress in Physical Geography, 27(1):88-106.
Oruc, M., Marangoz, A. M., and Buyuksalih, G., 2004, Comparison of pixel-based and object-oriented classification approaches using LANDSAT-7 ETM spectral bands, Proceeding of the ISPRS 2004 Annual Conference, Istanbul, Turkey, July 19-23.
Pateraki, M., Baltsavisa, E., 2002. Adaptive Multi-Image Matching Algorithm for the Airborne Digital Sensor ADS40, Asian Conference on GIS, GPS, Aerial Photography and Remote Sensing "Mapasia 2002", Bangkok, Thailand, 7-9 August.
Pateraki, M., Baltsavisa, E., 2003a. Analysis and Performance of the Adaptive Multi-image matching Algorithm for Airborne Digital Sensor ADS40. ASPRS Annual Conference 2003, Anchorage, AK, USA, 5-9 May. Pateraki M., Baltsavias E., 2003b. Analysis of a DSM generation algorithm for the ADS40 Airborne Pushbroom Sensor, In: Gruen A., Kahmen H. (Eds.), Optical 3-D Measurement Techniques VI, pp. 83-91.
Shibasaki, R., Tsuno, K., Morita, K., Chen, T., 2003. Triplet-matching for DEM generation with PRISM, ALOS. International Archives of
extraction and application in high-resolution remote sensing image, Proceedings of IGARSS 2005, Seoul, Korea, July 25-29.
Wolf, P.R, and B.A. Dewitt, 2000. Elements of photogrammetry: with applications in GIS, 3rd ed., McGraw-Hill.USGS, Landsat Missions Project Descriptions: http://landsat.usgs.gov/about_project_descriptions.php.
目錄
摘要 ... 1 Abstract ... 2 一、前言 ... 3 1‐1 計畫緣起 ... 3 1‐2 計畫目的 ... 3 二、工作規劃 ... 4 2‐1 工作進度 ... 4 2‐2 工作組織與人力配置 ... 6 三、工作項目及內容... 8 3‐1 研究目標 ... 8 3‐2 分年度工作目標 ... 8 四、各項工作執行方法、執行情形及成果分析 ... 11 4‐1 文獻回顧 ... 11 4‐1‐1 航遙測與光達之研究概況 ... 11 4‐1‐2 影像分類方法 ... 12 4‐1‐3 崩塌地變遷監測 ... 13 4‐2 研究方法 ... 14 4‐2‐1 多期原始航攝影像對位及衍生資訊之基準校正功能研究與開發 ... 144‐2‐2 原始航攝影像萃取地形及光譜資訊功能之研究與開發 ... 19 4‐2‐3 研究多維度資訊輔助崩塌地變遷之分析模式 ... 23 4‐2‐4 崩塌地多維資料庫雛型建置 ... 23 4‐3 執行情形及成果分析 ... 24 4‐3‐1 多期原始航攝影像對位及衍生資訊之基準校正功能研究與開發 ... 24 4‐3‐2 原始航攝影像萃取地形及光譜資訊功能之研究與開發 ... 44 4‐3‐3 研究多維度資訊輔助崩塌地變遷之分析模式 ... 77 4‐3‐4 崩塌地多維資料庫雛型建置 ... 81 五、結論與檢討建議... 86 六、參考文獻 ... 88 七、次一年(103)度作業規劃與流程 ... 91 八、附錄(會議記錄及決議辦理情形) ... 94
圖目錄
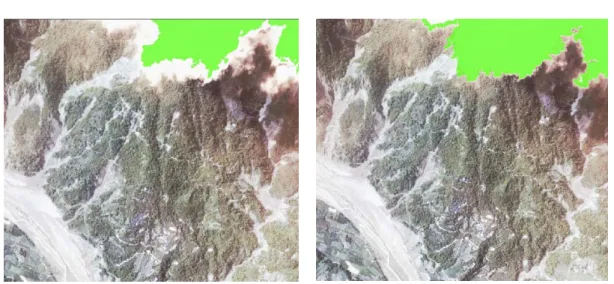
圖2-1. 工作組織及人力配置圖 ... 7 圖3-1. 農航所目前以航攝正射影像產製崩塌地圖資之流程 ... 8 圖3-2. 研究地區圖 ... 10 圖4-1. DMC 鏡頭配置及多光譜影像與全色影像套疊圖(紅色方形為多光譜影像) ... 15 圖4-2. 單像後方交會圖與共線條件式 ... 16 圖4-3. ADS40 掃描方式圖 ... 17 圖4-4. ADS 之 L0 及 L1 影像示意圖 ... 18 圖4-5. 影像分割-區域成長法示意圖 ... 20 圖4-6. 第二階段崩塌地自動化萃取流程圖 ... 22 圖4-7. DMC 原始影像對位結果 ... 25 圖4-8. 正射影像(DMC 相機拍攝) ... 26 圖4-9. ADS40 L0 影像及影像對位成果 ... 27 圖4-10. 人工操作建立影像參數匹配 DTM 的示意圖 ... 28 圖4-11. 替換 Match-T 匹配專案參數的雛型程式畫面 ... 29 圖4-12. 執行 Match-T 批次匹配畫面 ... 29 圖4-13. 空三前後高程差示意圖(左:正射影像,右:高差圖) ... 31 圖4-14. DMC 高程轉換測試 I 區 ... 32 圖4-15. DMC 測試 I 區 DTM 差值圖(左:轉換前,右:轉換後) ... 32 圖4-16. DMC 測試 I 區轉換前後 DTM 差值直方圖 ... 35 圖4-17. DMC 高程轉換測試 II 區 ... 35 圖4-18. DMC 測試 II 區 DTM 差值圖(左:轉換前,右:轉換後) ... 36圖4-19. DMC 測試 II 區轉換前後 DTM 差值直方圖 ... 38 圖4-20. ADS40 高程轉換測試 I 區 ... 38 圖4-21 ADS40 測試 I 區 DTM 差值圖(上:轉換前,下:轉換後) ... 39 圖4-22. ADS40 測試 I 區轉換前後 DTM 差值直方圖 ... 41 圖4-23. ADS40 高程轉換測試 II 區 ... 41 圖4-24. ADS40 測試 II 區 DTM 差值圖(左:轉換前,右:轉換後) ... 42 圖4-25. ADS40 測試 II 區轉換前後 DTM 差值直方圖 ... 44 圖4-26. 雲覆蓋地區萃取流程圖 ... 45 圖4-27. 雲覆蓋地區初步判釋亮度值準則圖 ... 46 圖4-28. 過濾較小面積雲覆蓋地區圖 ... 46 圖4-29. 錯誤雲覆蓋地區示意圖(1) ... 47 圖4-30. 錯誤雲覆蓋地區示意圖(2) ... 47
圖4-31. 區域成長示意圖(eCognition 8.8 reference book) ... 48
圖4-32. 區域成長準則圖 ... 49 圖4-33. 初步萃取(左)與區域成長雲覆蓋地區(右)(1) ... 50 圖4-34. 初步萃取(左)與區域成長雲覆蓋地區(右)(2) ... 50 圖4-35. 初步萃取(左)與區域成長雲覆蓋地區(右)(3) ... 51 圖4-36. 初步萃取(左)與區域成長雲覆蓋地區(右)(4) ... 51 圖4-37. 初步萃取(左)與區域成長雲覆蓋地區(右)(5) ... 52 圖4-38. 影像雲覆蓋地區萃取精度成果圖 ... 55 圖4-39. 影像分區流程圖 ... 56 圖4-40. 原始影像圖(左)和對應影像分區圖(右)(影像 1) ... 57 圖4-41. 原始影像圖(左)和對應影像分區圖(右)(影像 2) ... 58
圖4-42. 原始影像圖(左)和對應影像分區圖(右)(影像 3) ... 58 圖4-43. 原始影像圖(左)和對應影像分區圖(右)(影像 4) ... 59 圖4-44. 原始影像圖(左)和對應影像分區圖(右)(影像 5) ... 59 圖4-45. 陰暗地區萃取崩塌地流程圖 ... 60 圖4-46. 陰暗地區(左)以及崩塌地萃取成果(右)圖(1) ... 61 圖4-47. 陰暗地區(左)以及崩塌地萃取成果(右)圖(2) ... 61 圖4-48. 陰暗地區(左)以及崩塌地萃取成果(右)圖(3) ... 62 圖4-49. 正常以及較亮地區崩塌地萃取流程圖 ... 62 圖4-50. 正常地區(左)以及崩塌地萃取成果(右)圖(1) ... 63 圖4-51. 正常地區(左)以及崩塌地萃取成果(右)圖(2) ... 63 圖4-52. 正常地區(左)以及崩塌地萃取成果(右)圖(3) ... 64 圖4-53. 較亮地區(左)以及崩塌地萃取成果(右)圖(1) ... 64 圖4-54. 較亮地區(左)以及崩塌地萃取成果(右)圖(2) ... 65 圖4-55. 較亮地區(左)以及崩塌地萃取成果(右)圖(3) ... 65 圖4-56. 崩塌地過濾前(上)過濾後(下)示意圖 ... 66 圖4-57. 崩塌地過濾前(左)過濾後(右)示意圖 ... 66 圖4-58. 原始影像上數化欲檢核向量檔示意圖 ... 67 圖4-59. 光線追蹤法轉換向量圖套疊於正射影像 ... 68 圖4-60. 光線追蹤法檢核點分佈(影像 1、影像 2、影像 3) ... 68 圖4-61. 光線追蹤法檢核點分佈(影像 4、影像 5) ... 69 圖4-62. 光線追蹤法誤差向量圖 ... 70 圖4-63. 影像 1 轉換檢核圖 ... 71 圖4-64. 影像 2 轉換檢核圖 ... 71
圖4-65. 影像 3 轉換檢核圖 ... 72 圖4-66. 影像 4 轉換檢核圖 ... 72 圖4-67. 影像 5 轉換檢核圖 ... 73 圖4-68. 「建物」誤判為崩塌地 ... 74 圖4-69. 「道路」誤判為崩塌地 ... 75 圖4-70. 漏判 ... 75 圖4-71. 自動萃取成果視覺化檢核與人工編修之流程圖 ... 76 圖4-72. 自動萃取 2 m 解析度原始影像程式... 77 圖4-73. 「分析範圍內崩塌地分期合併輸出」的圖形化使用者介面 ... 78 圖4-74. 兩航拍任務(090410d、091222d)有幾乎相同的各 6 個 footprint ... 79 圖4-75. 兩航拍任務崩塌地向量檔之屬性表(上:090410d、下:091222d) ... 79 圖4-76. 「分析範圍」(文武里)中,崩塌地空間分布的變遷 ... 80 圖4-77. 「分析範圍」(文武里)中,崩塌地的統計值(左:090410d、右:091222d) ... 81 圖4-78. 同一航拍任務中之不同原始影像,於重疊部分之自動萃取成果不一 ... 81
圖4-79. Feature to point 示意圖(ArcGIS 10.1 Help) ... 83
圖4-80. Identity 示意圖(ArcGIS 10.1 Help) ... 83
圖4-81. 產製「航拍任務崩塌地向量檔」並加入定義之屬性欄位流程圖 ... 84
表目錄
表2-1. 預定工作進度與查核點 ... 5 表2-2. 各階段工作期程與交付之成果 ... 6 表4-1. ADS 與 DMC 影像之光譜範圍 ... 15 表4-2. 資料庫內崩塌地向量檔的屬性欄位定義項目 ... 24 表4-3 DMC 測試 I 區轉換前後 DTM 差值統計(單位:公尺) ... 33 表4-4. DMC 測試 I 區轉換前後 DTM 差值統計(單位:公尺) ... 34 表4-5. DMC 測試 II 區轉換前後 DTM 差值統計(單位:公尺) ... 36 表4-6. DMC 測試 II 區轉換前後 DTM 差值分布 ... 37 表4-7. ADS40 測試 I 區轉換前後 DTM 差值統計(單位:公尺) ... 39 表4-8. ADS40 測試 I 區轉換前後 DTM 差值分布 ... 40 表4-9. ADS40 測試 II 區轉換前後 DTM 差值統計(單位:公尺) ... 42 表4-10. ADS40 測試 II 區轉換前後 DTM 差值分布 ... 43 表4-11. 成長條件以及迭代次數說明表 ... 49 表4-12. 影像 1 雲覆蓋地區評估誤差矩陣 ... 52 表4-13. 影像 2 雲覆蓋地區評估誤差矩陣 ... 53 表4-14. 影像 3 雲覆蓋地區評估誤差矩陣 ... 53 表4-15. 影像 4 雲覆蓋地區評估誤差矩陣 ... 54 表4-16. 影像 5 雲覆蓋地區評估誤差矩陣 ... 54 表4-17. 各個原始影像光譜資訊 ... 57 表4-18. 各張影像光線追蹤法之轉換精度成果表 ... 73摘要
台灣位於地震帶,地質脆弱,常因颱風來襲而發生山區崩塌,造成土石流與洪水等災害。為 國土保育,須長期監測容易發生崩塌的地區,以避免或減少災害發生所可能造成的損失。本計畫 使用農航所拍攝之Z/I DMC 與 Leica ADS40 高解析度航照影像資料,以及現有之航測製圖軟硬體 設備,藉由開發或整合現有軟硬體,研發快速萃取多維度崩塌地資訊之技術,並建置多時期崩塌 地資料庫,期能提供高品質之崩塌地資訊,以輔助防災、減災、救災與崩塌地復育之決策分析。 本年度計畫以旗山事業區為研究地區,結合物件導向影像分類法、航測方法與既有的地形圖 資,從原始航照影像自動萃取崩塌地資料,進行四個子題的先期試驗:(1) 多期原始航攝影像對 位及衍生資訊之基準校正功能研究與開發;(2) 原始航攝影像萃取地形及光譜資訊功能之研究與 開發;(3) 研究多維度資訊輔助崩塌地變遷之分析模式;(4) 崩塌地多維資料庫雛型建置。
Abstract
Being located in a seismic zone, the geology is fragile in Taiwan. Landslides, floods and other disasters induced by typhoon occur frequently. For land conservation, long-term monitoring of
landslides is necessary in order to avoid or reduce the losses caused by disasters. This project employs high resolution aerial imagery acquired by Z/I DMC and Leica ADS40, and the existing mapping software and hardware used in Aerial Survey Office, to develop a technique for rapidly extracting multi-dimensional information of landslide, and to build a multi-temporal landslide database. It is expected that the outcome of this project can provide high-quality landslide information to support decision making on disaster prevention and mitigation, as well as restoration of landslide areas.
For the current year of the project, Chi-Shan working circle was selected as the study site. Landslide data were extracted automatically from raw aerial images through combination of
object-oriented classification, photogrammetric procedures, and pre-existing topographic data. Four subtopics of this study included: (1) georeferencing of multi-temporal raw aerial images and adjustment of related information derived from the images; (2) extracting topographic and spectral information from the raw aerial images; (3) modeling landslides changes using multi-dimensional information; (4) developing prototype of multi-dimensional landslide database.
一、前言
1-1 計畫緣起
台灣位於颱風所經常通過的路徑上,幾乎每年都會多次面臨颱風的侵襲,再加上台灣位於地 震帶,地質原本就比較脆弱,山區崩塌更是頻頻發生,所以一旦颱風來襲,常常因為颱風所帶來 的豪雨,造成土石流與洪水,導致河流淤積、河水泛濫潰堤而淹沒城市或農田、魚塭等災害。從 近年來經過台灣的颱風所引發的災情,包括2008 年的卡玫基與辛樂克颱風,2009 年的莫拉克與 芭瑪颱風,以及2010 年的凡那比颱風,都可以發現颱風帶來快速累積的大量降雨,對於地表環 境以及人類活動的影響十分嚴重。此外,由於近幾年全球氣候異常的影響,台灣地區近十年來在 非颱風季節出現極端性暴雨的機會也逐漸增加。為了因應極端氣候以及暴雨發生機率提高所可能 造成的環境災害,吾人除應審慎檢視國土保育政策之外,並應長期監測容易發生崩塌的地區,以 避免或減少災害發生所可能造成的損失。 持續而有系統地蒐集崩塌地在時間與空間維度的資訊,是了解崩塌地之過去、現狀及發生原 因的有效途徑,也是掌握災情並提前預警的重要工作。傳統地面調查需要大量的人力、時間與經 費,其調查頻度與範圍均難以提高,且在災後輒因道路中斷,使得地面調查倍增困難或無法進行, 難以因應緊急狀況之需求。航遙測技術可以迅速獲取大面積的地表資料,不僅可以更有效率而經 濟的方式蒐集資料,透過航遙測影像分析的技術更可提供豐富而高精度之資訊,對於崩塌地的持 續監測乃是極佳的利器。1-2 計畫目的
林務局農林航空測量所(以下簡稱農航所)建置之航測影像資料倉儲系統以雲端服務之概念進 行規劃,並以高效率、高有效性、高可靠性與高擴充性為目標,成為雲端服務於地理資訊系統之 成功應用案例。農航所截至2009 年底為止已建置之圖資已近九十萬筆,總計影像儲存已達 400TB 以上,本計畫希配合農航所之航遙測影像資料倉儲系統,以及現有之航測製圖軟硬體設備,藉由 開發或整合現有軟硬體,研發由高解析度航照影像快速自動化萃取多維度崩塌地資訊之技術,並 建置全台多時期崩塌地資料庫,期能提供高品質之崩塌地資訊,以輔助防災、減災、救災與崩塌 地復育之決策分析。二、工作規劃
2-1 工作進度
本年度計畫預定工作時程為自102 年 3 月 10 日起至 102 年 12 月 15 日,含提交工作企劃書、 期中報告、期末報告及成果繳交、教育訓練、驗收,主要工作階段與期程說明如下: 1. 第一階段:於得標次日起 10 個日曆天內至農航所進行需求訪談,於得標次日起 25 個日曆天內製作工作企劃書報告12 份送交農航所審查,俟審查完成後,依據審查意 見進行修正,隨即按照企劃書內容展開各項工作。 2. 第二階段:於 102 年 7 月 15 日前完成「三、作業項目及程序」中之四個子題的初步 系統開發測試成果及資料庫雛型建置,並繳交期中報告書15 份,以及至農航所進行 期中報告及審查、展示試驗成果。 3. 第三階段:於 102 年 11 月 25 日前繳交所有成果(含本案教育訓練),並建立本案系 統作業環境,交付系統操作說明手冊、完整原始程式碼檔案(含編譯所需函式庫) 及系統自動安裝執行檔(電子檔)各2 份,繳交期末報告 15 份,以及至農航所進行 期末報告及審查、展示試驗成果,並於102 年 12 月 15 日前完成所有工作項目。 本計畫之預定工作進度與查核點如表2-1 所示,各階段工作期程與交付之成果如表 2-2 所示。表2-1. 預定工作進度與查核點 階 段 工作項目 決標 次日 +10 日 決標 次日 +25 日 102 年 7 月 15 日 102 年 9 月 30 日 102 年 11 月 25 日 102 年 12 月 15 日 一 需求訪談 擬定工作企劃書 二 多期原始航攝影像對位及衍生資 訊之基準校正功能研究與開發系 統測試 原始航攝影像萃取地形及光譜資 訊功能之研究與開發系統測試 研究多維度資訊輔助崩塌地變遷 之分析模式測試 崩塌地多維資料庫雛型建置測試 辦理期中審查 三 完成多期原始航攝影像對位及衍 生資訊之基準校正功能研究與開 發 完成原始航攝影像萃取地形及光 譜資訊功能之研究與開發 完成研究多維度資訊輔助崩塌地 變遷之分析模式 完成崩塌地多維資料庫雛型建置 完成 4 小時以上教育訓練 辦理期末審查、完成所有工作項 目
表2-2. 各階段工作期程與交付之成果 階段 成果繳交項目 單位 數量 成果繳交日期 第一階段 工作企劃書 份 12 於決標次日起25 個日曆天內繳交。 修正後工作企劃書 份 8 於審查會議次日起14 個日曆天繳交。 第二階段 期中報告書,以及四 個子題之初步系統開 發測試成果及資料庫 雛型建置 份 15 於102 年 7 月 15 日前繳交 第三階段 教育訓練 梯次 1 於102 年 11 月 25 日前完成。 與本案有關之研討會 或期刊論文(初稿) 至少一篇 篇 1 於102 年 11 月 25 日前完成。 系統操作說明手冊 份 2 於102 年 11 月 25 日前繳交。 完整原始程式碼檔案 ( 含 編 譯 所 需 函 式 庫)、系統自動安裝執 行檔(電子檔) 式 2 於102 年 11 月 25 日前繳交。 期末報告書 份 15 於102 年 11 月 25 日前繳交。 102 年度科技計畫研 究報告(修正後) 份 15 於102 年 12 月 15 日前繳交。
2-2 工作組織與人力配置
本計畫之工作組織與人力配置係根據計畫之需求,依工作性質及工作團隊人員專長做最適當 之調配與分工,由詹進發副教授擔任本計畫主持人,邵怡誠副教授擔任本計畫協同主持人,帶領 工作團隊執行本計畫。本計畫工作團隊依技術領域區分為:(1)籌劃與準備,(2) 系統整合與技術 支援,(3) 系統開發,(4)品質管制,(5) 成果彙整及編印等五個小組,工作人員名單及所擔任之 工作項目詳見圖2-1。詹進發 邵怡誠 單勇恩 梁平 孔繁恩 胡惠雅 陳立笙 成果彙整及編印 梁平 池佑頤 毛皖馨 黃筱婷 胡惠雅 品質管制與 系統測試 詹進發 邵怡誠 單勇恩 孔繁恩 陳立笙 系統開發 詹進發 邵怡誠 林志奕 曾建文 系統整合與 技術支援 詹進發 邵怡誠 籌畫準備 農林航空測量所 專案小組聯絡人 計畫主持人 詹進發副教授 協同主持人 邵怡誠副教授 圖2-1. 工作組織及人力配置圖
三、工作項目及內容
3-1 研究目標
農航所目前萃取崩塌地資訊之影像來源,以衛星影像及自行拍攝產製之航攝正射影像為主。 衛星影像因僅採用各波段光譜強度值作為分析資料源,少了地形等資訊,尚無法準確的區分出崩 塌地或裸露地;航攝正射影像可提供較細緻之影像紋理、輻射解析力等資訊,判釋正確率較衛星 影像高,然因其需先進行空三再產製數值地形模型進行糾正,故整體製作時程較長,且如僅以 GNSS/IMU 獲取之外方位快速產製圖資,易有基準不一之系統偏差,目前以航攝正射影像產製崩 塌地圖資之流程如圖3-1 所示。 圖3-1. 農航所目前以航攝正射影像產製崩塌地圖資之流程 農航所現有之航空照片影像包括:傳統類比式之航照掃描影像、DMC 與 ADS 40 的數位影像, 目前已納入航遙測影像資料倉儲系統,該系統透過雲端服務的架構針對農航所之各種業務提供高 效率的服務。本計畫將配合農航所之航遙測影像資料倉儲系統,以及現有之航測製圖軟硬體設備, 針對農航所之製圖流程開發軟體以提供新的功能或整合現有軟硬體,以達到自動化由高解析度航 照影像萃取多維度崩塌地資訊之目標,並建置全台多時期崩塌地資料庫。3-2 分年度工作目標
本計畫全程三年,計畫之目的為開發軟體以供由高解析度航照影像萃取多維度崩塌地資訊, 並建置全台多時期崩塌地資料庫。各年度工作目標說明如下: (一) 第一年(101 年度) 完成可建立航攝影像與崩塌地圖資相關聯之功能,軟體可讀取 ADS40 之 L0 或 L1之多波段影像,以及DMC 原始數值航攝影像。 完成可自原始航攝影像上進行崩塌地之初步萃取功能,並可將其轉換為 shapefile, 以及計算正射投影面積。 完成兩時期不同影像對位與資料基準轉換功能之雛形,包括半自動及全自動方位控 制與計算。 完成試驗區崩塌地基礎資料之蒐集,包含農航所歷年崩塌地向量資料、地形資料與 控制點資料之蒐集、補充、分析。 研擬崩塌地統一編號及屬性資料規格。 完成針對本年度計畫成果之教育訓練。 (二) 第二年(102 年度) 完成多時期影像對位與資料基準轉換功能,包括半自動及全自動方位控制與計算。 完成崩塌地區塊地形資料產製自動化或半自動化系統。 研究並提出定位與地形資料之合理精度規範。 完成崩塌地統一編號及屬性資料規格之研究與制定。 完成試驗區崩塌地多維資料庫雛形之建置。 完成多維度資訊輔助崩塌地變遷分析雛形。 完成針對本年度計畫成果之教育訓練。 (三) 第三年(103 年度) 完成「崩塌地多維資訊自動萃取系統」,系統主要功能如下: 提供完整之操作界面。 能正確無誤讀取並分析原始航攝影像。 具有多時期影像對位與資料基準轉換功能。 可利用多維度資訊進行崩塌地分類。 系統可讀取並匯出成果至「崩塌地多維資訊資料庫與監測系統」。
完成「崩塌地多維資訊資料庫與監測系統」之建置,系統主要功能如下: 內含崩塌地之基礎資料,並能匯入與崩塌地相關之向量圖資、多光譜影像、崩 塌地地形資料、時間資料以及相關維度資料等,且符合前期訂定之規範。 可管理崩塌地之多期向量、影像、光譜資料、地形資料及其他必要資料。 能分析、顯示、統計崩塌地之狀態資訊。 能標記並顯示待監測崩塌地。 能主動根據航攝紀錄提示被監測崩塌地之圖資產製訊息。 完成系統操作手冊與技術手冊。 完成針對本年度計畫成果之教育訓練。 第二年計畫將以林務局屏東林區管理處旗山事業區為研究區域,研究地區如圖3-2 所示。本 年度將進行四個子題的先期試驗: (一) 多期原始航攝影像對位及衍生資訊之基準校正功能研究與開發。 (二) 原始航攝影像萃取地形及光譜資訊功能之研究與開發。 (三) 研究多維度資訊輔助崩塌地變遷之分析模式。 (四) 崩塌地多維資料庫雛型建置。 圖3-2. 研究地區圖
四、各項工作執行方法、執行情形及成果分析
4-1 文獻回顧
4-1-1 航遙測與光達之研究概況
美國在1972 年 7 月 23 日發射第一顆地球觀測衛星 Landsat 1,後來陸續發射 Landsat 2~7 衛 星,近四十年來獲取數量十分龐大的地表影像,為從太空觀察地球表面最長久的記錄,對於環境 變遷分析與許多研究領域而言均是極佳的研究材料,Landsat 影像由美國地質調查所(United States Geological Survey, USGS)管理,並透過 Internet 免費提供各界使用(USGS, 2011)。惟 Landsat 影像 之空間解像力(spatial resolution)為 15~30 公尺,對於需要較高解像力之應用而言略有不足,近年 來許多國家陸續發射衛星遙測系統,例如:法國 SPOT 系列衛星之多光譜影像空間解像力 10~20 公尺,日本的ALOS (Advanced Land Observing Satellite)衛星之空間解像力為 2.5 公尺,我國所擁 有的 Formosat-2 衛星影像具有地面 2 公尺的空間解像力,DigitalGlobe 公司的 WorldView-2 衛星 影像更提昇至約 0.46 公尺的空間解像力,且由於目前有眾多高光譜解像力(spectral resolution)與 高空間解像力的衛星遙測系統在運轉中,資料取得極為便利,使得遙測技術對不同地物之辨識能 力大為增加,更大幅提昇遙測技術之實用性。
隨著遙測科技的進步,航測製圖已由人工類比模式提升為數位化,林務局農林航空測量所於 2006 年購置最新精密空照數位相機 Z/I DMC (Digital Mapping Camera),2007 年採購 Leica ADS40 空載數位掃描儀(Airborne Digital Sensor, ADS),用以取代傳統底片式航測相機,以及 POS 機載慣 性定位定向系統(Position and Orientation System),內含 GPS 與慣性量測裝置(Inertial Measurement Unit, IMU),於執行航攝任務之際快速獲取航空影像外方位資料,簡化空中三角測量平差程序, 應用數值影像配合電腦編修製圖,大幅節省人力與時間。目前國內應用DMC 與 ADS40 拍攝台灣 全區(含離島),提升了影像解析度及品質,且配合各項航空攝影計畫規劃平地地面解析度為公分 級之多光譜影像作為製圖、國土監測及規劃、森林資源調查、樹種判別、偵察農林天然災情,協 助稻作面積調查及林木病蟲等學術研究發展之用(農林航空測量所,2012)。DMC 為框幅式相機 (frame camera),ADS40 以推掃式(push broom)攝像記錄地表訊息,所得影像呈帶狀,兩種相機所 拍攝之影像均不需經過傳統底片沖洗及掃描等流程,航空攝影作業完畢後透過影像後處理軟體的 處理即可得到12 bit 多光譜波段(紅、綠、藍、近紅外)之彩色影像與高解析度全色態(panchromatic) 影像,大幅提升影像之輻射解析度及光譜解析度。其中由於拍攝時同時能取得近紅外波段的影像, 較傳統須獨立拍攝近紅外波段影像的作業方式,可節省許多作業成本。在發生重大災害時,為爭 取救援時間須盡快取得災區的影像資料,農林航空測量所已建立一套災害緊急應變工作流程,在 航攝數位影像取得、高解析度多光譜正射影像製作及後端加值應用等作業均有極高效率,於「阿
里山火災」、「八八水災」及「甲仙大地震」等事件中,具體展現應用航攝數位影像於防救災工作 之成果。(葉堃生等,2010)。 航遙測技術可以迅速蒐集大面積的資源資料,具有精確、省時、省工、節省經費等優點,目 前已廣泛應用於自然資源調查、天然災害調查、生態環境變遷監測、國土與交通運輸規劃等領域。 遙測技術有許多優點,然而地形遮蔽與天候之影響,亦使其應用受到限制。此外,由於多光譜影 像對於植生覆蓋之穿透能力不佳,因此無法直接測得林分結構,其他如林分材積、生物量等森林 資源重要資訊,也僅能藉由模式間接推估。雷射掃描(LIDAR,LIght Detection And Ranging)屬主 動式(active)遙測技術,由於 LIDAR 遙測技術具有高精度與穿透林冠之能力,結合遙測影像,不 僅可供測繪森林資源分布情形,亦可供推估林分結構、樹冠高度、生物量與林分蓄積,因此在林 業之應用上可提供更豐富的資源資訊,已成為航遙測技術發展與應用上之重要研究課題(Hudak et al., 2002; Lefsky et al., 1999; Lefsky et al., 2002; Lim et al., 2003; 詹進發,2005)。各種遙測技術在 應用上或多或少都有其限制性,但彼此間也存在互補性,因此結合不同來源遙測資料常可獲得更 佳的結果。劉治中等(2010)結合彩色航照與空載光達資料,藉由半自動化方式辨識崩塌地,其中 彩色航照利用綠度指數,空載光達資料則利用數值高程模型(DEM, Digital Elevation Model)與數值 地表模型(DSM, Digital Surface Model),除計算地物高度模型(OHM)與坡度資料外,亦結合地表粗 糙度(Roughness)來確定崩塌地範圍。蕭國鑫等(2007)以多時遙測衛星影像與三個時期的空載 LiDAR 資料,分析台灣西南地區外傘頂洲地區近 35 年間的變化與沙洲飄移趨勢,並比對與量化 往內陸移動的速率。
4-1-2 影像分類方法
各類地物對於太陽輻射能量的反射,在不同波長的情況下,其反射的強度會有所不同,因此 各類地物皆有其特殊的光譜反射曲線,如植被的部分在近紅外波段的地方反射強烈,一般在利用 多光譜影像偵測地表時,便經常利用近紅外波段觀察植被的位置與預防植物的病蟲害。相反的在 水體的部分,由於水體會吸收大部份的近紅外光,所以在分析時也可找出無反射近紅外波段的地 方,來偵測水體的位置。透過影像分類的技術,可利用不同地物對於太陽輻射能量反射的差異性 區分各種土地覆蓋類別,對於建置各種土地利用、土地覆蓋類型的主題地圖有很大的幫助(Jensen, 2007; Lillesand and Kiefer, 2008)。影 像 分 類 的 方 法 可 概 略 分 為 : 監 督 式 分 類(supervised classification) 與 非 監 督 式 分 類 (unsupervised classification)兩種,以及綜合前述兩種分類方法的混合式分類法(hybrid classification)。 以往在進行影像分類時,乃為依據個別像元(pixel)的輻射值,按照分類決策規則(decision rule)將 每一像元劃分為不同的類別(Jensen, 2007; Lillesand and Kiefer, 2008)。若單一像元的尺寸比較大(例 如:MODIS 空間解析度為 250 m、500 m、1000 m),一個像元涵蓋比較大的空間範圍,其分類方 法為以像元為基礎(pixel-based),若要區分比像元更小的物件,甚至須採用次像元(sub-pixel)的分
析法。然而,當影像的空間解像力提高時,各個不同類別的物件由多個像元所組成,逐像元的分 類法未考慮一個物件中各像元間的相關性,因此容易造成椒鹽效應(salt and pepper effect),使影像 分類的結果有許多零碎的點或坵塊,影響分類的精度(雷祖強等,2009;鄭雅文等,2008;Blaschke, 2010)。
近年來許多研究指出物件式影像分析法(object-based image analysis,簡稱 OBIA)可有效提升 高解析度遙測影像之分類精度,物件式分類法之主要程序為先將影像分割為區塊(region),以區塊 化的物件為單元,加入如:坡度、NDVI、紋理(texture)等空間特徵資訊以訂定分類規則,如此便 可改善以像元為單元的逐像元分類方法的缺點(Blaschke, 2010)。張立雨等(2007)以物件式影像分 類法萃取福衛二號 Quick-Look 影像之雲覆蓋,首先利用區塊成長法進行影像分割,再利用非監 督性分類法 K-MEAN 將分割後之區塊進行非監督性分類以產生訓練雲區區塊,最後利用所產生 之訓練雲區區塊計算雲區之碎形特性,並以此碎形特性進行所有雲區區塊之萃取。鄭雅文等(2008) 以物件導向分類法分析SPOT-5 影像之土地覆蓋類型,利用影像中呈現自然相鄰狀態特徵的方法, 將影像依均調性、空間相關性等因素,分割成不等的影像區塊再進行分類,故為一種結合空間相 關資訊和光譜資訊的分類技術。雷祖強等(2009)在雲林縣農業區內選擇高解析度數值航照影像 (Leica ADS40),用以萃取水稻田坵塊資訊,以逐像元與區域化分類概念進行比較,其研究結果顯 示區塊化物件分類模式可萃取出完整度極高的水稻坵塊田,分類精度較逐像元分類法高。
4-1-3 崩塌地變遷監測
台灣位於颱風所經常通過的路徑上,幾乎每年都會多次面臨颱風的侵襲,再加上台灣位於地 震帶,地質原本就比較脆弱,所以一旦颱風來襲,常常因為颱風所帶來的豪雨,造成土石流與洪 水,導致河流淤積、河水泛濫潰堤而淹沒城市或農田、魚塭等災害。從近年來經過台灣的颱風所 引發的災情,包括2008 年的卡玫基與辛樂克颱風,2009 年的莫拉克與芭瑪颱風,以及 2010 年的 凡那比颱風,都可以發現颱風帶來快速累積的大量降雨,對於地表環境以及人類活動的影響相當 嚴重。此外,由於近幾年全球氣候異常的影響,台灣地區近十年來在非颱風季節出現極端性暴雨 的機會也逐漸增加。為了因應極端氣候以及暴雨發生機率提高所可能造成的環境災害,吾人除應 審慎檢視國土保育政策之外,並應長期監測易發生災害之地區,以避免或減少災害發生所可能造 成的損失。 傳統地面調查需要大量的人力、時間與經費,其調查頻度與範圍均難以提高,且在災後輒因 道路中斷,使得地面調查倍增困難或無法進行,難以因應緊急狀況之需求。航遙測技術可以迅速 獲取大面積的地表資料,不僅可以更有效率而經濟的方式蒐集資料,透過航遙測影像分析的技術 更可提供豐富而高精度之資訊。因此,利用遙測技術輔助易發生災害區域之調查,乃兼具學術研 究與實務應用上的價值。王美惠(2008) 以稍來溪為崩塌潛勢分析之研究對象,利用921 集集大地 震、桃芝颱風、72 水災等不同災害時期之 SPOT 衛星影像結合數值高程模型(Digital ElevationModel, DEM)資料以及航照圖,應用 GIS、影像分類法及常態化差異植生指標(NDVI)對崩塌 地進行判釋分析。劉守恆(2002)利用 SPOT 衛星影像資料探討自動辨識崩塌地的可行方法,分析 其適用性與準確度,並利用地震前後多時期衛星影像資料進行崩塌地自動判釋來分析地震事件對 於濁水溪流域內崩塌地發育模式之影響。 洪凱政(2009) 以艾利颱風為案例,利用颱風發生前後期 的衛星影像以進行崩塌地偵測,其分類方法分別利用了影像像元之單一特徵及區塊物件之多種特 徵,包括與光譜、形狀、紋理等有關二十種特徵條件,並以物件導向分析方式,先建立特徵篩選 機制以找出有利於分類之多種特徵條件,並建立知識庫,依循著合理的邏輯規則建立決策樹,以 逐步分類的方式進行崩塌地判釋,以期達到提升判釋精度之目的。劉治中等(2010) 結合彩色航照 與空載光達資料,藉由半自動化方式辨識崩塌地,並利用三維立體展示的人機操作介面,供人工 判釋及編輯崩塌地邊界向量資料。其中彩色航照利用綠度指數,空載光達資料則利用數值高程模 型(DEM)與數值地表模型(DSM),除計算地物高度模型(OHM)與坡度資料外,亦結合地表粗糙度 (Roughness)來確定崩塌地範圍,其成果顯示利用上述參數,依訓練樣區統計資料選定適當之門檻 值後,可有效地偵測出局部範圍的崩塌區位置。黃韋凱等(2010)利用物件導向式遙測影像分析方 法進行大範圍坡地與河川災害快速判釋,以改善像元式影像分析方法於分類時常有之雜訊問題。 其研究使用福爾摩沙二號衛星在莫拉克颱風事件前後遙測影像,利用災害前後期影像同時進行均 質化分割技術,於兩張影像上產生出相同區塊,以解決不同時期影像之地貌分類邊界問題;以區 塊為分析單元,依照人工判釋經驗與階層式的邏輯,加入合適之空間特徵資訊(包括光譜值、坡度 等),訂定分類規則流程,由單純至複雜的地貌進行十四種分類,建立出有系統之分類程序。
4-2 研究方法
由於農航所現有之航照影像包括數種不同格式,影像處理程序與使用的軟體亦不盡相同,因 此本計畫將根據不同航攝影像之處理方式分別開發軟體,以完成各項先期試驗,研究方法說明如 後。4-2-1 多期原始航攝影像對位及衍生資訊之基準校正功能研究與開發
4-2-1-1 DMC 航照原始影像對位及衍生資訊之基準校正 4-2-1-1-1 DMC 成像幾何與波段 DMC 與傳統框幅式相機(frame camera)相同,為中心透視投影,中間四個鏡頭每曝光一次可 記錄四張7168 x 4096 大小之全色(panchromatic)原始影像,四張影像可合組成一張解析度為 13824 x 7680 的全色影像。外圍左右各兩個鏡頭共四個鏡頭,每曝光一次可記錄四張 3072 x 2048 大小 之多光譜(multispectral)原始影像,分別記錄 12 bit 之紅光、綠光、藍光、紅外線影像,多光譜影 像與全色影像套疊如圖4-1 所示。圖4-1. DMC 鏡頭配置及多光譜影像與全色影像套疊圖(紅色方形為多光譜影像)
4-2-1-1-2 DMC 影像產品
DMC 每曝光一次可記錄四張全色(panchromatic)原始影像及四張多光譜(multispectral)原始影 像,由此八張原始影像經由後處理軟體PPS (Post Processing Software) 可以產生各種不同組合之 產品,ADS 與 DMC 影像之光譜範圍如表 4-1 所示。 表4-1. ADS 與 DMC 影像之光譜範圍 影像類型 ADS 影像 DMC 影像 光譜解析度 全色: 0.465-0.680 µm 藍光: 0.430-0.490 µm 綠光: 0.535 -0.585 µm 紅光: 0.610-0.660µm 近紅外光: 0.835-0.885µm 全色: 0.450-0.739 µm 藍光: 0.400-0.580 µm 綠光: 0.500- 0.650 µm 紅光: 0.590-0.675µm 近紅外光: 0.675-0.850µm 4-2-1-1-3 DMC 影像對位
DMC 為中心透視投影,當相機曝光的一瞬間,相機會送出一個 event 訊號給 POSAV (position and orientation system airborne vehicles )的 GPS,GPS 會記錄此一瞬間之時間供後處理內插曝光點 使用。DMC 航空照片之投影方式為透視投影(perspective projection),欲藉助航照外方位參數與數 值地形模型,並搭配向量圖徵進行反投影處理,其間牽涉之理論主要為共線條件(collinearity condition),即地面點位坐標、相應之影像像元點位坐標,以及曝光位置等三點,在空間上應該位 於同一直線上,如圖4-2(何維信,1995)。式中(x,y)為像空間坐標,(x0,y0,f )為分別為像主點改 正坐標值與相機焦距;(X,Y,Z)為物點坐標,m11~m33為旋轉矩陣M 各元素,分別為飛機飛行當時 對上述 X、Y、Z 三個軸旋轉之旋轉量,可求得 M 矩陣各元素(何維信,1995)。像空間坐標則可 透過仿射轉換(affine transformation),再轉算為影像坐標,進行各種反投影後之影像處理。 反投影解算過程所需之資料包括:欲投影之向量圖徵點位資料、數值地形模型、航照影像之 內、外方位參數等。其中,同一航照相機之內方位固定,與影像之對位關係變化有限,可將對應 關係視為相同;另農航所自購入GPS/INS 輔助導航系統後,即可解算每張照片之外方位參數,故 搭配農航所提供之外方位參數檔,即可進行向量圖徵反投影處理。不同時期之影像對位可藉控制 點反投影至影像加以比對,便可進定位作業,並可供校正相應產生之原始數值地形資料。 圖4-2. 單像後方交會圖與共線條件式 4-2-1-1-4 DMC 成果之基準轉換 對於不同時期或不同坐標基準所產生的 DMC 製圖成果,須經過三維空間的坐標轉換,以獲 得一致的坐標基準。當局部區域有相同點位可作為轉換控制點時,在不考慮網形變形的理想情況 下,只需要七參數即可作任何三度空間座標的正交轉換,此七參數包括一個尺度參數 S,三個平 移參數ΔX、ΔY、ΔZ,及三個旋轉參數εx、εy、εz。一般較常用的有 Bursa-Wolf 模式和 Molodensky-Badekas 模式,經前一年度研究結果顯示二者參數值雖不同,但轉換後的坐標成果均 ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( 33 32 31 23 22 21 0 33 32 31 13 12 11 0 L A L A L A L A L A L A a L A L A L A L A L A L A a Z Z m Y Y m X X m Z Z m Y Y m X X m f y y Z Z m Y Y m X X m Z Z m Y Y m X X m f x x
相同,因此本計畫將僅採用Bursa-Wolf 模式進行坐標轉換。Bursa-Wolf 模式如下: 對於直接使用POS 資料計算與經空三平差計算後所造成成果的不同基準,因為本計畫將在資 料庫中註記崩塌區之坐標,依該區周圍的空三計算點位作為控制點,依前述正交轉換模式,解算 二者間的關係,再將先前成果資料轉換至空三平差後之坐標基準。 4-2-1-2 ADS 航照原始影像對位及衍生資訊之基準校正 4-2-1-2-1 ADS 成像幾何與波段 ADS 採用三線式推掃(pushbroom)方式成像,在單線上為中心透視投影,因航帶掃描成像時 各線影像是單獨各自成像,所以航帶影像是為半中心透視投影。ADS 在前傾(forward)、垂直(nadir)、 後傾(backward)角度各有一條全色之 12000 像元之 CCD (Charge Coupled Device)掃描線,在垂直角 度的位置另有一條錯開半個像元(3.25μm)之 CCD 掃描線,可提升地面解析力。另外在垂直、後傾 角度各配備一組四色分光鏡,可使得同一光束被分成藍光、綠光、紅光與近紅外光之四個光譜波 段,因此四個光譜波段具有相同的入光位置,且其解析度皆為12000 像元,輻射解析度(radiometric resolution)為 12 bit (圖 4-3)。 圖4-3. ADS40 掃描方式圖 4-2-1-2-2 ADS 影像產品
L0 影像為 ADS 之原始影像,由軟體 GPro/XPro 產製的各項產品如 L1 或 L2,皆是處理自 L0 影像。ADS 影像掃描時會同時產生方位參數 ODF 檔(Orientation Data File, ODF)及相機參考 CAM 檔(Camera Calibration File, CAM)。ODF 檔為 L0 之外方位資料檔,此外方位參數為飛行時, 依各條掃描線(scan line)之攝影時間內插 GPS/INS 之觀測量所得,同步紀錄各條掃描線之外方位參 數。CAM 檔為相機參數檔,內容記錄相機焦距及掃描線上各像元轉換到像面(focal plane)坐標之 資料。 L0 影像雖然帶有方位,但是由於飛機運動及姿態之改變,造成影像扭曲。因此 L1 之影像試 圖糾正影像到一固定高度之平面來改正由飛機抖動造成的影像變形。此糾正過程會重新取樣並旋 轉影像到共軛核線上以利立體觀測。L0 影像及糾正後之 L1 影像如圖 4-4 所示。 圖4-4. ADS 之 L0 及 L1 影像示意圖 4-2-1-2-3 ADS 影像對位 由於 ADS40 影像為推掃式成像,因此所形成的影像為一帶狀影像,其長度跟飛行的距離有 關,飛得越長,則影像也越長。如果使用者只需要某一區域的影像進行立體觀測或自動 DTM 匹 配,並無法如片幅式影像僅抽取所需的影像。因此必須先產生L1 影像,且開發一個切割 L1 影像 的工具,讓使用者根據需求切出L1 影像,之後再利用 L1 影像去進行對位或 DTM 匹配作業。
但因 ADS 成像幾何的特性,所對應的像元可能不是唯一解,需經內插及反覆計算才能獲得,所 以反投影的作業方法並不利本案工作。若產製L2 影像,也就是讀取 ODF 檔及 CAM 檔、並配合 當地已有或新匹配之DTM 資料,則能經由共線式的計算獲得 L2 影像,即能與其他相機或其他時 期拍攝的影像進行對應定位作業,並可供校正相應產生之原始數值地形資料。 4-2-1-2-4 ADS 成果之基準轉換 因ADS 成果資料的基準轉換原則上與 DMC 之作法相同,但差別在於 ADS 影像是推掃式成 像,各掃描線之方位略有微小差異,且隨距離差異而變動不一,因此本案預計依空三平差後之成 果,取固定掃描線區間之點位進行正形轉換,中間區域則內插計算,用以轉換崩塌區之坐標基準。 4-2-1-3 多期原始航攝影像對位及衍生資訊之基準校正功能研究與開發 依據前述方法進行不同時期航攝影像對位與基準轉換之後,本年度計畫將開發軟體以提供原 始影像衍生資訊(例如:二維向量圖檔等)之基準校正功能,軟體具有圖形使用者介面以便於操作, 圖檔經過基準校正之後可減少因坐標基準不同所造成之偏差,其成果可用於變遷分析。
4-2-2 原始航攝影像萃取地形及光譜資訊功能之研究與開發
4-2-2-1 第一階段自動化萃取:物件式影像分類 影像分類依最小分類單元可區分為像元式與物件式。由於ADS40 和 DMC 影像的空間解像力 極高,傳統的像元式分類容易造成椒鹽效應,物件式分類則把影像中各像元間之空間關聯性納入 分析程序,許多研究已證實可有效提升影像分類精度。因此,本研究將以物件式分類從原始影像 中萃取崩塌地資料。主要程序說明如下: (1)影像分割 影像分割的方法有很多種,可大致分為三類:(1) point-based:以像元之灰階值作為分割的門 檻值;(2) edge-based:例如邊緣偵測的方法;(3) region-based:透過分割與合併構成區塊。區域 成長法(region growing)乃是以像元和像元之間的光譜反射值之差異作為分割區塊的依據,若大於 一定的門檻值,則分割成不同的區塊,反之則不將其分割。區域成長法之影像分割的成果如圖4-5 所表示,可以明顯看出在不同的區塊其光譜反射值差異大,因此在自動分割時會分割成不同區域。 本研究將利用eCognition 軟體提供的 multi-resolution 分割演算法進行影像分割,此演算法以由下 而上(bottom up)的區域合併法,從單一像元逐步形成較大的區域,區域是否合併乃依據同質性指 標(Homogeneity Criterion)估量一個影像物件與相鄰物件之間的相似度或歧異度,此指標結合影像 物件之紋理(texture)、顏色(color)與形狀(shape)屬性。圖4-5. 影像分割-區域成長法示意圖 (2)影像前處理 在分析原始影像時常面臨兩項問題:(1)影像品質問題、(2)影像坐標問題。在影像品質方面, 由於飛機拍攝時可能因為雲霧的影響,導致拍攝的原始影像會有雲層遮蔽的現象;另一方面,受 到山區地形與太陽照射角度的影響,使得山地地區常有陰影遮蔽的情形。因此,在崩塌地萃取之 前須先處理原始影像上雲覆蓋和陰影的問題。 (3)影像分類 依訓練樣本的使用與否,可區分為監督式、非監督式與混合式(先採非監督式分類,再進行監 督式分類,以提高分類精度)。 監督式分類的分類精度一般而言高於非監督式分類結果,對於分類成果之類別亦較容易掌握。 本計畫嘗試藉多維資訊之輔助、於原始影像上獲得可視為訓練樣本之崩塌地光譜資訊,進而提高 分類之客觀性與自動化程度。 DMC 影像在崩塌地影像資訊之萃取較為單純,本項工作需讀取崩塌地圖資之 Shapefile 檔案, 利用Shapefile 中之面狀向量圖徵之二維點位坐標,配合 40m 或 20m 密度之數值地形模型,內插 解算向量圖徵點位之三維坐標,然後將向量圖徵之點位,投影至不具overview 之 DMC TIFF 格式