國
立
交
通
大
學
交通運輸研究所
碩
士
論
文
單一車道自動公路系統發生意外事故下
自動車輛跟車邏輯
Automatic Vehicle Control Logic in case of Incidence in
Single-Automated-Lane Highway System
研 究 生:蔡孟釗
指導教授:許鉅秉 教授
單一車道自動公路系統發生意外事故下自動車輛跟車邏輯
Automatic Vehicle Control Logic in case of Incidence in
Single-Automated-Lane Highway System
研 究 生:蔡孟釗 Student:Meng-Chao Tsai 指導教授:許鉅秉 Advisor:Jiuh-Biing Sheu 國 立 交 通 大 學 交 通 運 輸 研 究 所 碩 士 論 文 A Thesis
Submitted to Department of Institute of Traffic & Transportation College of Management
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master
in
Institute of Traffic & Transportation June 2005
Taipei, Taiwan, Republic of China
單一車道自動公路系統發生意外事故下自動車輛跟車邏輯
學生:蔡孟釗 指導教授:許鉅秉 國立交通大學交通運輸研究所碩士班 摘 要 自動車輛發展為未來趨勢,自動車輛的開發以及控制方式,已經有相當多的 研究,本文並非研究如何從收集到的資訊,轉換到車輛的內部引擎或是煞車的控 制;而是設計一套跟車邏輯,判斷車輛針對前方車流,該做如何的反應。在未來 硬體可以配合下,期望自動控制車輛能夠依循此邏輯順暢行駛在最內側為自動車 道的高速公路上;即使自動控制車道上發生意外事故,在變換車道後,也可以順 暢的以混合車流的方式通過事故點,而不會有追撞的危險。 控制邏輯根據九種不同的相對數據,設計出四種跟車模式,在不同情況下, 轉換不同的模式跟車,自動車輛為了避免減速或是加速影響後方車流的不穩定, 設計了兩個指標,「Dmax」以及「Dmin」,稱為動態距離設定最大值以及動態距 離設定最小值,隨著前方車流不同,此值也會不同。車輛和前車的距離如果大於 動態距離設定最大值則加速,車輛和前車的距離如果小於動態距離設定最小值則 減速,界於此兩值之間則等速前進;另外加減速度的設計顧及搭乘者的舒適性, 採用拋物線加速度模型,使得加減速不會過猛。 利用程式語言 TURBO C,以類似車流模擬軟體的方式,模擬各種跟車情境, 將車輛的動態輸出在螢幕上,先藉由三輛車的模擬測試以及調整模式可行性,再 模擬一條車道的車流,以機率分配以秒為單位釋放自動車輛以及人為操作車輛在 車道上,觀察車流狀況,以GM 跟車指標判定自動車輛跟車穩定性,嘗試以各種 車流理論圖形解釋分析數據。為了求得一般車輛行駛能夠和車流模擬軟體相同, 以兩個檢定確定其真實性以及可靠性。Automatic Vehicle Control Logic under Incidence in
Single-Automated-Lane Highway System
student:Meng-Chao Tsai Advisors:Dr. Jiuh-Biing Sheu
Institute of Traffic & Transportation College of Management National Chiao Tung University
ABSTRACT
A trend of the future in development and control methods has been lots of research about Automatic Control Vehicle. The main subject of research topic is to design an automatic car-following logic by the judgment of the front vehicle behavior rather than the conversion of the data collected by the detector at vehicle to set engine power or brake torque. By the hardware developed in the future, the automatic vehicle will be expected to follow by the controlling logic to drive smoothly in single
automatic lane highway system.
Four models are created according to the data collected by the detector with respect to two flags “Dmax” and “Dmin” for automatic car-following dynamically. If the distance between the auto-vehicle and the vehicle in front of it is longer than the dynamic value “Dmax”, the automatic one needs to be accelerated. On the other hand, if the distance between the auto-vehicle and the vehicle in front of it is shorter than the dynamic value “Dmin”, the automatic one needs to be decelerated and slowed down. Otherwise when the distance between the two vehicles is between “Dmin” and
“Dmax”, the auto-vehicle remains at the same speed and requires no action. With the simulation software written in TURBO C program language, the
dynamic distance of every vehicle will be output on the screen in a way similar to that produced by the micro-traffic flow simulation software. Modifying four models by simulation with three vehicles in one-lane, we validate our system by analyzing figures and tables obtained from the data output.
誌 謝 能夠寫到誌謝,論文也算是完成了;深知完成論文不是什麼偉大事情,也不敢在 此大放厥詞,只是剛好有這此機會,能夠在此紓發自己的心聲。在感謝眾人之前,想先 反省自己以及道出自己內心的感受。 我深知自己的反應不是很快,談話沒有說服力,甚至語言的組織邏輯也很差,做事 不夠聰明,連帶影響效率不彰,得失心又重,事情容易放不下;這些不是在數落自己的 缺點,也不是搏取大家的同情,只是希望自己能夠藉由用筆墨來寫,提醒自己能夠慢慢 的有在進步。如果到目前為止,能夠有某些作為讓人認同,應該只是自己會在意別人的 眼光,不願意服輸,不希望表現的太差而已;說這些,是為了給後面留伏筆,因為自己 不良的個性而有犯過的錯誤,要感謝大家的寬容以及幫助甚至指正。 短短的兩年中,吸收到的知識和得到的經歷是整個求學生涯到目前為止最豐富的一 段,很無悔自己選擇這裡來就讀,能夠擁有多位和藹可親又學識淵博的教授們,作為研 究的榜樣和楷模,是非常興奮的一件事,在這裡,每位教授都能給予學生許多啟發。 感謝指導老師 許老師給予這麼好的論文點子給我想像,並給予極大的發揮空間, 讓我能夠在得到結果的過程中非常享受自己付出的辛勞和努力。也感謝 藍武王老師, 在畢業前的最後一個學期,帶給我這麼富有哲理以及有趣的車流理論,將一門很實務的 科學從理論面精闢的剖析,論文的第六部份完全是仰賴車流理論的功勞。 感謝父母在求學的過程中給予持續的支持和肯定,如果能夠讓你們引以為傲是我感 到最大的快樂之一。 感謝彥楨的善解人意和無私的付出,容忍我一次又一次的脾氣,傾聽我的埋怨,陪 我完成論文的整各過程。感謝所有的研究所同學,每位都曾經幫助過我度過不同的難 關,不論是學業也好,生活上也好,遊戲也好,相處的時光雖然只有短短兩年,卻有許 多回味無窮的事情,像作計畫時,和智詠跑了好幾趟鶯歌,謝謝他搜集了這麼多的資料, 謝謝小章在運輸實務時的幫忙以及許多課業上的幫助,感謝阿糾提供了兩年的生活娛 樂,感謝酷冰俠偉成找我打球…等,不及全部備載,但所有的同學都是我要感謝的。 也要感謝在台南招待我的樊乃榕和河童小葉,陪我到渡過五年也陪我到交大考試的 繡文,以及常常跟我喝咖啡打籃球做壞事的猴逸祥;還有人很好的黑龍,臉很黑的少樺, 白痴章俊彥;還有曾經一起出去玩的高中同學們,大家都曾帶給我很美好的回憶。 也許寫的太長了,但這都是在夜深人靜、有點落寞下的有感而發,應該能夠較無遺 漏的表達自己的感覺。要奮鬥的日子還很長,對論文的完成不敢自滿,這只是一個測試 自己的開始;希望所有的好朋友們都一起努力,達成自己的目標,也祝福大家。
目 錄 中文摘要... i 英文摘要...ii 誌謝...iii 目錄... iv 表目錄... vi 圖目錄...vii 一、緒論 ... 1 1.1 研究背景... 1 1.2 研究動機... 2 1.3 研究目的... 3 1.4 研究方法... 4 1.5 研究範圍... 4 1.6 研究步驟... 5 二、相關文獻回顧 ... 7 2.1 人為跟車理論... 7 2.1.1 Pipes 和 Forbes 理論 ... 7 2.1.2 General Motors 模式 ... 7
2.1.3 Collision avoidance models(CA)... 8
2.1.5 國內跟車間距相關研究... 8 2.2 自動車輛跟車邏輯文獻回顧... 8 2.2.1 自動車輛偵測系統 ... 8 2.2.2 混合車流決策樹 ... 10 2.2.3 自動車輛跟車行為模式... 11 2.2.4 毫米波變頻雷達 ... 12 2.2.5 乘車舒適度指標 ... 13 2.3 小結 ... 14 三、跟車模式構建 ... 15 3.1 模型假設 ... 15 3.1.1 自動控制車輛和一般人為操作車輛之差別... 15 3.1.2 自動控制車輛(AC veh.)之功能假設... 15 3.1.3 系統假設 ... 16 3.2 變數定義 ... 16 3.2.1 車輛相關變數 ... 16 3.2.2 事故距離相關變數 ... 17 3.3 跟車型態種類 ... 17 3.4 跟車最適當距離概念 ... 18 3.5 乘客最舒適加速度的概念 ... 20 3.6 偵測前車團求得末速... 22 四、模式架構 ... 24 4.1 加減速度的大小 ... 24 4.2 最適距離的判斷與決定 ... 25
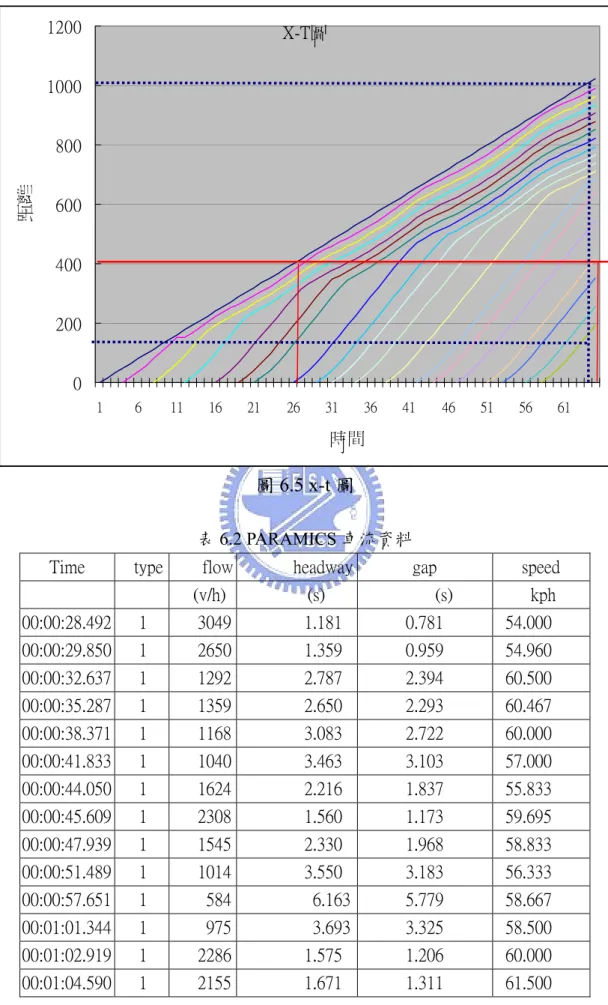
5.1 程式撰寫 ... 30 5.1.1 程式撰寫流程 ... 30 5.1.2 繪圖程式 ... 33 5.1.3 距離判斷 ... 33 5.1.4 程式 ... 35 5.2 情境模擬與分析 ... 35 5.2.1 情境一 ... 35 5.2.2 情境二 ... 37 5.2.3 情境三 ... 39 5.2.4 情境四 ... 41 5.3 模式適用情境... 43 5.3.1 緊急煞車 ... 43 5.3.2 模式轉換 ... 43 5.4 小結 ... 44 六、模式驗證 ... 46 6.1 跟車檢測標準 ... 46 6.1.1 跟車標準的認定 ... 46 6.1.2 制定跟車檢測標準 ... 46 6.2 模擬初始狀態設定及一般車輛之檢定 ... 48 6.2.1 初始流量及密度設定 ... 49 6.2.2 利用車流模擬軟體調整人為操作車輛控制邏輯... 51 6.3 自動車輛控制邏輯模式驗證 ... 57 6.3.1 調整首車加(減)速大小... 57 6.3.2 平均車間距計算 ... 63 6.3.3 穩定和不穩定車流平均車間距之比較... 69 七、結論與建議 ... 75 7.1 結論... 75 7.2 建議 ... 76 參考資料 ... 78
表 目 錄 表 2.2 衝度異常門檻值表 ...14 表 3.1 距離判定 ...19 表 5.1 模擬情境一 ...36 表 5.2 模擬情境二 ...37 表 5.3 情境模擬二 ...38 表 5.4 模擬情境三 ...40 表 5.7 模擬情境四 ...42 表 5.8 距離對煞車時間 ...43 表 5.9 速度對煞車時間 ...43 表 5.10 改變模式的減速時間 ...44 表 5.11 改變距離 ...44 表 6.1 跟車穩定性指標 ...47 表 6.2 PARAMICS 車流資料 ...52 表 6.3 Pearson TypeIII 機率表 ...54 表 6.4 χ-square 檢定表 ...55 表 6.5 K-S 檢定表...56 表 6.6 實驗設計加(減)速度 ...57 表 6.7 C-value 值...58 表 6.8 實驗設計 ...64 表 6.9 平均間距(穩定車流) ...64 表 6.10 平均間距(不穩定車流) ...65 表 6.11 平均間距(實驗三) ...67
圖 目 錄 圖 1.1 自動車道 ... 2 圖 1.2 研究流程圖 ... 6 圖 2.2 跟車反應系統 ... 9 圖 2.3 判斷決策樹 ... 10 圖 2.4 距離示意圖 ... 11 圖 3.1 毫米波變頻雷達 ... 16 圖 3.2 自動跟車示意圖 ... 17 圖 3.3 跟車情境 ... 18 圖 3.4 速度對時間 ... 21 圖 3.5 拋物線加速度與減速度 ... 21 圖 3.6 相對距離示意圖 ... 23 圖 4.1 象限圖 ... 25 圖 5.3 程式流程圖 ... 32 圖 5.1 車道 ... 33 圖 5.2 車輛 ... 33 圖 5.4 情境模擬一 ... 35 圖 5.5 情境模擬二 ... 37 圖 5.6 模擬情境三 ... 39 圖 5.7 模擬情境四 ... 41 圖 6.1 Greenshield 模式下流量對速度示意圖 ... 49 圖 6.2 Greenshield 模式下流量對密度示意圖 ... 50 圖 6.3 x-t 圖,固定 x ... 50 圖 6.4 x-t 圖,固定 t ... 50 圖 6.5 x-t 圖 ... 52 圖 6.7 α 對時間圖(a=2) ... 59 圖 6.8 α 對時間圖(a=3) ... 59 圖 6.9 α 對時間圖(a=4) ... 60 圖 6.10 時間對相對距離圖(a=2) ... 60 圖 6.11 時間對相對距離圖(a=3) ... 60 圖 6.12 時間對相對距離圖(a=4) ... 61 圖 6.13 時間對距離圖(a=-2) ... 61 圖 6.14 時間對距離圖(a=-3) ... 62 圖 6.15 時間對距離圖(a=-4) ... 62 圖 6.16 Q-K 圖 ... 63 圖 6.17 不同比例跟車間距圖(穩定車流) ... 64 圖 6.17 不同比例跟車間距圖(實驗二) ... 65 圖 6.18 一般車輛 ... 66
圖 6.19 自動車輛占 20% ... 67 圖 6.20 自動車輛占 40% ... 68 圖 6.21 自動車輛占 80% ... 68 圖 6.22 自動車輛占 100% ... 69 圖 6.23 不同比例跟車間距圖(實驗三) ... 69 圖 6.24 穩定車流下迴歸分析圖 ... 71 圖 6.25 不穩定車流下迴歸分析圖 ... 71 圖 6.26 迴歸分析比較圖 ... 72 圖 6.27 立體跟車間距圖(自動車佔 0%) ... 72 圖 6.28 立體跟車間距圖(自動車佔 20%) ... 73 圖 6.29 立體跟車間距圖(自動車佔 40%) ... 73 圖 6.30 立體跟車間距圖(自動車佔 63%) ... 74
一、緒論
1.1 研究背景
近年來,世界各國為解決交通擁擠及其伴隨而至之交通事故、能源消 耗、環境污染與運輸安全等課題,與為增進旅客與貨物之流暢與經濟生產 力,皆戮力發展智慧型運輸系統(Intelligent Transportation System, ITS)。 而在智慧型運輸子系統中,自動公路系統(Automated Highway System, AHS) 是指以車輛完全自我控制,或利用路旁的設施,使車輛得以自動駕駛。其 目的在藉由先進通訊及自動控制等技術的應用,協助駕駛人行駛車輛,以 降低駕駛人開車時精神及體力上的負擔,提昇交通安全與運輸效率。 本研究背景係以在高速公路上,開闢最內側車道為單一自動控制車道 的自動公路系統環境,唯有配備自動控制器之車輛能夠進出此車道,一旦 進入此車道即為自動控制;出去此車道則轉為人為駕駛。倘若自動控制車 道下游發生意外事故,此車道上之自動控制車輛接收到訊號後,距離事故 比較近的自動車輛必須緊急煞車;距離事故比較遠之自動車輛即可預先變 換車道。本研究期望自動車輛在變換車道之後,在仍為自動控制的情況 下,和其他車道上之人為操作車輛混合行駛。對一般車道混合有自動和手 動駕駛車流的跟車模式進行模擬與驗證。本研究著重在自動控制車輛的跟 車邏輯(圖 1.1)做探討,這個部份不同於以往的傳統跟車行為,需要對前方 車輛,不論是自動或是非自動車輛的行為做出適當反應。
圖1.1 自動車道
1.2 研究動機
在現行的跟車過程,駕駛人無形耗費了許多的時間及精力在注意與前
車的相對速度以保持適當、安全的距離,故自動駕駛系統,是未來 ITS
(Intelligent Transport System)發展的方向,而自動控制車輛發展有幾個過 程:
一、 自動定速車輛(Automatic Cruise Control vehicle),能夠在高速公 路 上定速高速行駛,目前發展至可以在市區自動定速低速駕駛。 二、 研發自動車輛在車輛稀少之公路行駛,可依狀況調整加速、減速、 或是停止。 三、 自動車輛能夠相互串連,以車隊為單位並應用在高速公路上,開創 一條自動控制車道,將自動車輛和非自動車輛相互隔離,各自行駛 各自的車道。 四、 將自動控制車輛和一般車輛能夠混合行駛,而不去限制車道是否為 自動車輛或是非自動車輛行駛之用。 對相關自動控制車輛之文獻,已經有為數不少並且深入的探討,從單
一車輛行駛乃至於車隊串聯,直到自動變換車道;不過,想要達到完全混 合自動和手動車輛行駛仍有相當多的問題需要克服;但對於上述第三點高 速公路單一自動控制車道,倘若自動控制車道發生事故,期望自動車輛在 變換車道之後,也能夠短暫的自動行駛至通過事故點之後在變換回自動控 制車道。此種事故下的混合自動控制車輛以及人為操作車輛的車流模式, 在發展自動高速公路系統之後,的確會存在此問題,也令人好奇是否有適 當的方法,可以將事故衝擊減至最小,並期望推廣至全面的混合車流,因 而選定此主題做研究。 1.3 研究目的 由研究背景與動機可得知,最內側自動控制車道上面發生事故,行駛 在此道之車輛在轉換至一般車道之後,必須和一般人為操縱車輛混合行 駛,如果將車道上的車輛區分成自動車和手動車這兩種,這時候的跟車行 為,除了一般傳統的人為跟車方式(後方駕駛者是人,前方則可能是自動 車輛或是人為操作車輛);增加了自動車輛的跟車(自動車輛前方可能是自 動車輛或是人為操控車輛)。許多文獻對自動車輛的跟車行為,雖有許多 研究,且有別於人為傳統跟車模式的判斷;但似乎沒有單獨研究跟車的文 獻(通常跟車會伴隨變換車道一起討論),因此顯得跟車這個部份並不夠仔 細和微觀。本研究從自動控制車輛變換車道之後的跟車加速度,做出: 1. 跟車加速度模型的建立 2. 最適當跟車距離的構建 3. 乘客的舒適度 上述三點為本研究最主要之目的。即自動車輛在混合車流之中,距離 能夠在最安全,坐在車裡的人能夠感覺最舒適下,控制自動車輛的加減速 度,使所有車道上的所有車輛,在事故發生時,能有效率且不至於發生第 二次事故的情況下通過事故現場。 強制混合兩種不同特性的車輛,高速公路從自動車輛變換車道開始, 到通過事故點,在這段距離中要判斷混合車流的績效,判斷模式是否可 行;後續研究便可以從中再推廣至高速公路車道全面混合車流。
1.4 研究方法 本研究將傳統人為跟車模式和自動駕駛車輛行為模式相結合,配合事 故造成之影響,根據研究目的,研究的方法如下: 1. 最適跟車距離:根據最適加速度,控制跟車的距離不致過遠或是過近, 儘可能以等速的跟車方式前進。 2. 最適跟車加速度:判斷前方車輛種類,為自動或為非自動,在不同的安 全距離、速度下,且顧及乘客舒適,求出自動車輛對應前方車輛所需要 的最適加速度。 3. 乘客舒適度:控制加速度不可太急,將加速度或是減速度控制在一定範 圍,以免影響乘客舒適度,加速度過大或過小也會影響最適跟車距離, 在這三者間取捨出一個合適的大小。 4. 模擬混合車流情形:將自動車輛特性及找出相關參數,藉由程式語言(C 語言),判斷自動控制車輛之對應前方車輛應有之加速度,模擬自動控 制車輛各種行為。 5. 評估混合車流的績效,調整參數,以敏感度分析的方式評估最適化的跟 車加速度。 1.5 研究範圍 本研究之範圍主要界定在,當高速公路上的內側車道為一條自動控制 車輛專用車道,而其餘車道則為一般手動人為駕駛,當內側自動車輛車道 下游發生意外事件,從自動控制車輛開始變換車道,通過事故點,再回到 最內側車道,在這段過程中討論: 1. 希望找出自動控制車輛在混合車流下,對於不同情境,處理混合車流下 可能發生的狀況。以一輛自動車輛為基礎,考慮後方或是旁邊車道如果 變換車道對自動車輛判斷的影響,但不考慮自動車輛本身的變換車道行 為。 2. 每一個車道可能皆存在著自動車輛和手動車輛混合行駛。 3. 判斷前方車輛種類,為自動或為非自動,在不同的安全距離、速度下, 求出自動車輛對應前方車輛所需要的最適加速度。 4. 最適跟車距離:控制跟車的距離不致過遠或是過近,盡可能以等速的跟 車方式前進。 5. 乘客舒適度:控制加速度不可太急,以免影響乘客舒適度,加速度過大 或過小也會影響最適跟車距離。
6. 混合自動控制車輛和手動控制車輛之車流,找出自動控制車輛之跟車加 速度。 7. 模擬自動車輛在混合車流之下的跟車行為。 8. 變動參數,以敏感度分析求出最適化跟車行為。 1.6 研究步驟 就本研究探討之自動控制車輛跟車模式,擬定研究步驟如下,而相關 流程如圖(圖 1.6)所示: y 研究動機與目的:詳見1.2 研究動機以及 1.3 研究目的。 y 文獻回顧:分為兩部分文獻回顧 1.傳統跟車理論的文獻回顧 2.關於 自動控制車輛相關文獻 y 研究方法:詳見1.4 研究方法。 y 情境模擬:模擬研究動機中混合車流下各個不同模式,就是對不同車 輛跟車行為的不同加以模擬。 y 情境分析:延續情境模擬,對不同的情境模擬之後加以討論並且修 正,以達到最適化跟車加速度。 y 敏感度分析:調整加速度控制參數,判斷參數的不同對自動車輛跟車 的影響是否有關。 y 結論與建議:總結本研究所得之成果做出結論,並對後續研究提出建 議。
圖1.2 研究流程圖 研究動機與目的 文獻回顧 撰寫程式 模型假設 情境分析 結論與建議 敏感度分析 自動控制 車輛系統 傳統人為跟車模 式車輛系統 研究課題之確認 建立跟車邏輯 各種情境判斷
二、相關文獻回顧
本章節將對一些國內外有關跟車理論與模擬軟體的文獻來做回顧。 依序為有關歷年來跟車理論、自動控制車輛相關文獻與模擬軟體以及程式 語言來做回顧。 2.1 人為跟車理論 跟車(car-following)是指後車在非自由的車流狀態下,必須經常調整其 行車速度以便與前車保持一安全距離,其間的加減速度行為。跟車理論的 主要內容是藉跟車行為發生時,後車與前車間的速度、距離等的互動關 係,藉以找出駕駛者在跟車時具有的共同反應,並將這些變數以方程式來 加以描述[1]。接下來將以時間順序[2]列出重要跟車模式,並且將可參考之 模式詳細列出。 2.1.1 Pipes 和 Forbes 理論 Pipes(1953)首先以安全距離的觀念來表示後車的車速與間離間的關 係,假設每一位駕駛者與前行車輛維持的空間與己車的速度成比例且加上 一段距離。Pipes 理論的缺點為在低速與高速情況下會出現低估的現象,這 與實際不符。Forbes 在跟車模式行為中加入反應時間(Reaction Time),使後車用以 判斷是否該減速煞車,其認為前車之後緣與後車之前緣間的時間間隙(Time Gap)至少應大於或等於反應時間,所以,最小的時間間距(Time Headway) 的數學關係式等於反應時間加上前車車長距離之行駛時間。[3]
2.1.2 General Motors 模式
在1950年末期至1960年初期之間,美國通用汽車研究群(GM group)
之中的Chandler, Herman and Montroll (1958)三人[4],在通用汽車位於底特 律的實驗室,使用現場照相調查並統計的方式,加入(m, l)矩陣建立刺激-反應方程式。隨後又有經過許多人的修改,如Herman,Potts (1959)、Helly (1959)、Gazis et al.(1961)、May and Keller (1967),他們在變數幾乎仍都維 持原本不變之下,不斷的校估模式的參數,以求最佳化。這個模式又有人 稱之為GHR模式[4]。
2.1.3 Collision avoidance models(CA)
和GM模式發展的時間上同為五零年代末期,CA模式之創始人為日 本人,Kometani and Sasaki(1959),輸出的值則是和Pipes及Forbes理論相同
為跟車的安全距離,不同的是,CA模式多考慮了前車的速度變化,速度變 數也為非線性為二次方之變數。 2.1.5 國內跟車間距相關研究 論文使用到國內針對跟車間距相關之文獻如表2.1。[3] 表2.1 跟車相關研究 作者 跟車間距模式 張家祝 MFG=0.75438×Vt+6.4 MFG:最小跟車間距(公尺) Vt :後車速度(公尺/秒) 藍武王、王 日昌、江勁 毅 DISTbest=1.36×speedn+1+20/3 DISTbest:最佳距離(公尺) speedn+1:後車速度(公尺/秒) [註]以模糊控制求得之最佳跟車距離 2.2 自動車輛跟車邏輯文獻回顧 對於自動車輛有相當多研究,對於自動車輛在混合車流之下跟車行為,也 有文獻探討,以下將逐一列出。首先將先對自動車輛對前車偵測系統介 紹,再者對自動車跟車行為相關研究做一介紹。 2.2.1 自動車輛偵測系統 對於自動車輛有許多相關研究,下圖(圖2.2)為其中一篇[10]對現行的 自動駕駛系統加以改善的文獻,目的要使汽車即使在市區行駛,也能在很 短距離內判斷使否應該加速或是減速,亦或是煞車,因而發展的自動駕駛 系統,而這套系統在內文中是適用在市區多車輛的情形之下;和本文章想 了解的發生意外事故時車輛混合跟車,有相當關係,原因在於,在未通過 事故前,車速也是相對緩慢,可以拿市區狀況做參考。在圖中,在「 加 速度/速度/距離控制器」的判斷公式如下:
加(減)速度判斷公式: (2.1) 其中 - Fa(t)為受到的風阻 - Fg(t)為道路坡度的重力 - M 為車重 2. 煞車系統判斷公式: (2.2) 圖2.2 跟車反應系統 此文獻的優點在於 1. 明確表示車輛上控制車輛加速、減速的裝置、設備。 2. 適用於經常性加速/減速皆可使用。 缺點在於: 1. 並無明確表示偵測前方資料的範圍上限。 速度 相對速度 距離 資料收集感應器 加速度/速度/距離 控制器 汽門控制 煞車指令 引擎/傳送 系統 煞車系統 自動駕 駛器 縱向動態控制模式 跟車加速度
2. 雖有判斷法則,但將前方車輛種類(人為駕駛、自動車輛)列入考慮。 3. 只適用於縱向判斷,對於變換車道並無考慮。 2.2.2 混合車流決策樹 藉由和前方車輛的相對速度和相對距離,利用決策樹(圖 2.3)找出十種 判斷情境[11],十種判斷情境適用於三種判斷公式,公式如下: Law1:前方車輛距離尚遠,本車維持理想速率即可 (2.3) Law2:前方有車且車間距太短時,需維持安全距離。 (2.4) Law3:前方有車且車速較本車快,本車可提高速度 (2.5) 利用決策樹來表示,在何種情況下,要使用哪種模式。模式主要根據 GM 線性模式(文獻中稱之 GHR 模式)修改而成,加入反應時間的考量。 圖2.3 判斷決策樹
Is there a car in front? Is optimal velocity greater than
car ahead’s velocity?
Has safety spacing been
violated? Is spacing less than critical value?
Is relative velocity less than critical value?
Law1 Law2 Law1 Law3 Law1 Law2 YES YES YES YES NO NO NO NO NO YES
2.2.3 自動車輛跟車行為模式 根據 J.B.Sheu 的自動車跟車加速度模式,簡述如下: 1 1 2 2 = k k k iσ
W
W
α
×α
+ ×α
(2.6) 其中 α1 為前車的瞬間加速度,α2 是前方車團的瞬間加速度,W1 、W2 是動態比重,分配各應該給多少值,分別如下: (2.7) (2.8) 其中X
k iσ :在第k 個偵測時間點,i
α 車輛車頭到事故發生點的距離, 同理X 1 k j n − 代表j
n 1− 車輛車頭到事故發生點的距離。以此類推X
k j n 。 Xk i j n→α :在第k
個偵測時間點,j n 車輛車頭到i
α 車輛車頭的距離。(圖 2.4) 圖 2.4 距離示意圖W
k 1、W
k 2表示自動控制車輛i
σ 跟隨j
n ,j
n 1− 兩車的加速度變化, 會依照j
n ,j
n 1− 距離事故的遠近改變i
σ 車輛跟車加速度的動態比重,採 用羅吉特模式,又W
1k+W
k2=1,亦即當j
n 距離i
σ 比較近,W
1k比較大,W
k2 相對比較小。又因為前車離本車(i
σ )距離(X
k i j n→α )必小於前前車和本車 距離,因此W
k2必小於W
1k,代表前車對本車的加速度調整影響較大。 ACX
tmc iσX
k i jn α→X
1 k j n −j
n 1− 1 1 1 k j n k k k jn jn jn i k X X X X e W e e − − → σ ⎛ ⎞ − ⎜⎝ ⎟⎠ ⎛ ⎞ ⎛ ⎞ −⎜⎝ ⎟⎠ −⎜⎝ + ⎟⎠ = + 1 1 1 1 2 k k jn jn i k k k jn jn jn i k X X Xe X X W e e σ σ → − − → − − ⎛ ⎞ −⎜⎝ + ⎟⎠ ⎛ ⎞ ⎛ ⎞ −⎜⎝ ⎟⎠ −⎜⎝ + ⎟⎠ = +2.2.4 毫米波變頻雷達 毫米波技術在通信、雷達、電子對抗和激光光譜學等方面有相當應 用。毫米波的工作頻率介於微波和光之間,因此兼有兩者的優點。它具有 以下主要特點: 1. 極寬的帶寬:通常認為毫米波頻率範圍為 26.5~300GHz,帶寬高達 273.5GHz。超過從直流到微波全部帶寬的 10 倍。即使考慮大氣吸收, 在大氣中傳播時能使用四個主要窗口,但這四個窗口的總帶寬也可達 135GHz,為微波以下各波段帶寬之和的 5 倍。這在頻率資源緊張的 今天無疑極具吸引力。 2. 波束窄:在相同天線尺寸下毫米波的波束要比微波的波束窄得多。例 如一個 12cm 的天線,在 9.4GHz 時波束寬度為 18 度,而 94GHz 時波 速寬度僅 1.8 度。因此可以分辨相距更近的小目標或者更為清晰地觀 察目標的細節。 3. 與雷射相比,毫米波的傳播受氣候的影響要小得多,可以認為具有全 天候特性。 4. 和微波相比,毫米波元器件的尺寸要小得多。因此毫米波係統更容易 小型化。 由於毫米波的這些特點,加上在電子對抗中擴展頻段是取得 成功的重要手段。毫米波技術和應用得到了迅速的發展。 毫米波技術的應用,表面上看來毫米波系統和微波系統的應用範圍大 致是一樣的。但實際上兩者的性能有很大的差異,優缺點正好相反。因此 毫米波系統經常和微波系統一起組成性能互補的系統。 毫米波雷達的優點是角度分辨率高、頻帶寬因而有利於採用脈衝壓縮 技術、系統的體積小。缺點是由於大氣吸收較大,當需要大作用距離時所 需的發射功率及天線增益都比微波系統高。下面是一些典型的應用實例: 1. 空間目標識別雷達:例如一部工作於 35GHz 的空間目標識別雷達其天 線直徑達 36m。用行波管提供 10kw 的發射功率,可以拍攝遠在 16000km 處的衛星的照片。一部工作於 94GHz 的空間目標識別雷達的 天線直徑為 13.5m。當用 20kw 的發射功率時,可以對 14400km 遠處 的目標進行高分辨率攝像。 2. 汽車防撞雷達:因其作用距離不需要很遠,故發射機的輸出功率不需 要很高,但要求有很高的距離分辨率(達到米級),同時要能測速,且
雷達的體積要盡可能小。所以採用以固態振蕩器作為發射機的毫米波 脈衝都普勒雷達。採用脈衝壓縮技術,大大提高了距離分辨率。利用 毫米波都普勒雷達得到精確的速度值。 3. 直升飛機防碰雷達:現代直升飛機的空難事故中,飛機與高壓架空電 纜相撞造成的事故占了相當高的比率。因此直升飛機防碰雷達必須能 發現線徑較細的高壓架空電纜,需要採用分辨率較高的短波長雷達, 實際多用3mm 雷達。 4. 精密跟蹤雷達:實際的精密跟蹤雷達多是雙頻系統,即一部雷達可同 時工作於微波頻段(作用距離遠而跟蹤精度較差)和毫米波頻段(跟 蹤精度高而作用距離較短),兩者互補取得較好的效果。例如美國海軍 研製的雙頻精密跟蹤雷達即有一部 9GHz、300kw 的發射機和一部 35GHz、13kw 的發射機及相應的接收系統,共用 2.4m 拋物面天線, 已成功地跟蹤了距水面 30m 高的目標,作用距離可達 27km。附加的 好處有:毫米波頻率可作為隱蔽頻率使用,提高雷達的抗干擾能力。 2.2.5 乘車舒適度指標 乘客舒適度指標根據張季倫(2002)[5],行車舒適乃指因不當駕駛行為 導致行車舒適度降低,主要評估指標分兩大類,分別為前後俯仰指標及車 速穩定指標: 1. 前後俯仰指標:(1) 指標定義:因急加速或急煞車導致乘客因慣性作 用而產生之俯仰程度。(2) 指標內容:da(t)/dt (衝度)。(3) 指標功能: 前後俯仰指標是造成乘車不舒適的主因,因此偵測車輛行駛時加速度 之程度大小,為指標的主要功能,為了衡量駕駛加減速行為之程度, 以加速度對時間的微分量做為判定依據,除了可以偵測駕駛是否有踩 油門或煞車之行為外,將該變化量與正常範圍之門檻值比較,則可判 定駕駛是否有急加速或急減速之行為產生。(4) 指標原理:通常造成 乘客前後俯仰的原因是駕駛發生急加減速行為時,當此種駕駛行為發 生時,車輛會因慣性作用而產生突向前傾或後頓之現象,在車內的人 也會隨車體前後搖擺。因此以加速度對時間的微分量做為指標,觀察 單位時間內加速度之變化量,可有效偵測駕駛是否有急踩油門或煞車 之行為導致車體突向前傾或後頓,造成乘客前後俯仰而感到不適或受
傷。(5) 調查結果:如表 2.2。 表2.2 衝度異常門檻值表 衝度感受 小 中 大 衝 度 範 圍 (m/s3) +-(1.16~1.62) +-(1.62~2.06) >+-2.06 2. 車速穩定指標:(1) 指標定義:車輛行駛速差過大。(2) 指標內容:某 時間區間內,加速率標準差與平均速率之比值(速率坡度)。(3) 指標原 理:速率坡度指標(velocity gradient)是由於加速度離異指標(acceleration noise) 演變而來的,加速率離異指標的定義是某特定時間內,加速度 的標準差大小,標準差越大,表示駕駛人的速率越不穩定。 2.3 小結 對於傳統跟車行為模式已經有相當多的研究成果,對於自動車的研究 也是許多人努力在發展的。而總合這兩者,便有混合車流跟車行為的產 生;亦因為每個人對車輛特性定義不一,考慮的變數也會有所出入,所以 模式的用法上也會有不同,因此藉由參考文獻中的資料,加上上述之決策 樹判別方法,加上參考文獻跟車模式[6],配合傳統跟車模式,模擬混合車 流之情況。
三、跟車模式構建
跟車控制邏輯乃期望將自動控制車輛順暢並且安全通過事故地點。混 合車流比一般傳統難預測的原因在於1.自動車輛在變換車道後,其前車的 模擬來源可能是人為操作車輛,如何動態又及時做反應? 2.所有在自動控制 車道鄰近車道之所有車輛(包含已經變換車道完成之自動控制車輛),皆有 可能受到正要從自動控制車道轉換車道之車輛的影響而難以掌握,因此模 式也會由此問題衍生出來。 3.1 模型假設 3.1.1 自動控制車輛和一般人為操作車輛之差別 界定自動控制車輛(以下簡稱 AC veh.)和一般人為操作車輛(以下簡稱 MC veh.)之不同,主要在於對資訊掌握的程度以及精確度,AC veh.比 MC veh.佔了較大的優勢,為了方便模式表達,以變數型態列出兩者之間差異: 1. 緩衝時間(τ):緩衝時間是為了反應前車速度變化,判斷是否加減速度 的緩衝時間,簡單來說,即觀察到前車改變狀態至本車做出反應之前 的時間。 2. 車輛到事故的距離(X k ):自動控制車輛可以藉由動態即時偵測到事故的地點(J.B.Sheu [23]),靠資訊傳遞至 AC veh.,使得 AC veh.比 MC veh. 可以精確掌握事故發生地點所在。 3. 對前方車輛速度(V k j n )及兩車相對距離(Xkjn→iα )掌握: AC veh.利用雷 達或是雷射測量前方車輛的車速亦或者是兩車距離,將比MC veh.利 用人為判斷精準。 3.1.2 自動控制車輛(AC veh.)之功能假設 自動控制車輛研發至目前為止有相當多的研究,已經是可行並且漸趨 於實用的階段,也是方便於模式的設定,這邊將對自動車輛基本必須具備 的功能(大部分自動控制車輛相關文獻皆提到的功能)作假設,如下: 1. 自動控制車輛車頭裝設感應器:由 3.1.1 可知,AV veh.能夠藉由儀器 判斷前車速度及AC veh.和前車距離,為顧及未來科技發展,以及求得 廣泛之使用,採用目前逐漸發展之毫米波變頻雷達(FMCW)取代傳統 雷達,雷達波發射廣角為正負五度,利用毫米波變頻雷達配合毫米波 脈衝都普勒雷達,詳見2.2.3 節。這邊假設自動車輛和前車距離是連續
偵測,隨時判斷跟車的遠近,而速度並非隨時偵測,而是配合距離的 遠近決定是否偵測,偵測的時機將在模式構建的部份中說明。 2. 偵測器能夠感應的有效範圍:根據第一點之假設,毫米波變頻雷達有 效偵測範圍是兩百公尺,詳見2.2.3 節。 3. 車輛控制變數:除第一點所描述之變數之外,AC veh.對於本身速度, 以及本身加速度之控制,也是必須知道之變數。 4. 自動控制車隊最佳串聯車輛數:根據 R.Rajamani 和 Shladover[24],將 自動控制車輛最佳串聯數目定在八輛,也就是說最多可以八輛自動車 為一個單位,擁有共同的速度、加速度以及固定的車距。 圖 3.1 毫米波變頻雷達 3.1.3 系統假設 1. 假設事故發生在最內側車道,並未波及鄰近車道。 2. 假設事故地點位置可藉由 GPS 系統定位,使得 AC veh.可以確定車輛 和事故之距離。 3. 假設在車前兩百公尺直線上車輛,皆可測得速度以及和本車的距離。 4. 距離為動態隨時偵測,速度並非隨時偵測,而是配合距離的遠近決定 是否偵測。 3.2 變數定義 構建模式之前先將會使用到之變數以及代號定義。 3.2.1 車輛相關變數 1. i1 :轉換車道之後之自動車輛,以此輛車為基準,在它前方一部車為 i 2 ,在它前方兩部車為
i
3,可視(圖 3.2)。 2.V
1:i
1目前的瞬時速率。同理V 2為i
2目前的瞬時速率V
3為i
3目前的瞬時速率。如圖3.2。 3.
a1
:i
1目前的瞬時加速度。同理a2
為i
2目前的瞬時加速度,a3
為i
3目 前的瞬時加速度。 4.D
12:i
1和i
2瞬間測得的動態距離。同理D
23為i
2和i
3瞬間測得的動 態距離。如(圖 3.2)。 圖3.2 自動跟車示意圖 3.2.2 事故距離相關變數 1. X1:i
1車輛車頭到事故發生點的距離,同理X2代表i
2車輛車頭到事 故發生點的距離,同理X3代表i
3車輛車頭到事故發生點的距離。 2.ϕ
:一個和前車保持安全距離的靜態常數,通常都預設為0.1。 3.L
:平均車長,設定為5 公尺。 4. Vσ :混合車道上游至事故發生處,偵測器可偵測範圍內的所有車輛平 均車速。 5. [(1 + ϕ ) × L +v
1 × τ ]:留有一個平均車長以上加上緩衝時間(τ) 會行走的距離。用來設定i
1在瞬間時間點和前車應保持之最短安全距 離。 3.3 跟車型態種類 在混合車流之中,將車輛區分成人為操作車輛以及自動車輛。許多文 獻中有提到,跟車並非只是跟前面一輛車輛,而是必須考慮到更前方的一 部車;我們假如可以獲悉前方車陣資料,便可以預先由更前方的車流做預 測,會比單看前方一輛車來的精準,假設以一輛自動車輛作為跟車的基準 車輛,也就是i
1,則跟車必須考慮到i
2及i
3,甚至是更前方之車輛也可做 為考慮,而本模式基本上是以三輛車為討論的基準,因此跟車的形態會出 現下列四種(圖 3.3):Automatic
i
1Manual
i
2Manual
i
3D
23D
12V
1V
2V
31. ACÆMCÆMC:
i
2是人為操作車輛,i
3也人為操作車輛。 2. ACÆMCÆAC:i
2是人為操作車輛,i
3是自動車輛。 3. ACÆACÆMC:i
2是自動車輛,i
3是人為操作車輛。 4. ACÆACÆAC:i
2是自動車輛,i
3也是自動車輛。 圖3.3 跟車情境 3.4 跟車最適當距離概念 以往的跟車文獻當中,對於跟車最適距離只設定一個最小值(critical distance),小於這個值的話,就必須減速,但是對於自動車而言,必須有 更嚴謹的方式判斷;一方面是因為為了整體車流的順暢,另一方面是為了 坐在裡面的乘客的舒適,分述如下: 1. 整體車流的順暢:當一輛車突然的煞車,立即影響的是後面的一部車, 但會導致在更後面的車輛,每一部車都必須加上反應時間再煞車,使 得整各車流產生車流的長鞭效應;可能最初減速的車輛已經加速在前 進,但在它後面的車輛卻有還在煞車減速,以discharge headway 舉例 來說,讓所有車輛在紅燈轉綠燈放行之後,為何不能立即達到saturatedheadway?而是在到達 saturated headway 之前,前幾部車的 headway 相 當長。是否有辦法控制讓所有車輛在紅燈轉綠燈放行之後立即達到 saturated headway?這就是自動車輛設計的精神所在:大家一起減速或 AC vehicle AC vehicle MC vehicle AC vehicle AC vehicle MC vehicle MC vehicle 本車 前車 前前車
加速。如今在混合車流之中,後面的車輛可能是人為操作,並不一定 可以存在像自動車輛的特性,而是會有長鞭效應的存在,所以,在設 計模型時不會隨便讓自動車輛減速或是加速,以免影響行車道路的效 率。 2. 乘客的舒適:如果採用傳統的跟車方式,是否只要還沒到 critical point 就不需要減速,而且減速的標準都是依緊急煞車而定,這樣對於自動 車的發展是不合理的。下一節會對乘客的舒適配合以往的調查做出合 適的模型。
為了顧及此兩個因素,我們設立兩個變數方別是
D
min以及D
max。D
min代表跟車最小可接受距離,小於此值,則自動車輛要在顧及乘客舒適度下減
速;而
D
max代表跟車最大可接受距離,大於此距離,車輛就必須開始加速;如果本車和前車的距離這兩各值之間,則是設計讓車輛等速度行駛,不做
改變。如表3.1。
表3.1 距離判定
D
12<D
minD
min≦D
12≦D
maxD
12≧D
maxi
1減速i
1等速i
1加速 最適當距離的設計考慮的變數有: 1. 前車(i
2)以及前前車(i
3)的車輛種類 2.i
1和i
2的相對速度 3.i
1和i
2的動態距離 4. 前車(i
2)和前前車(i
3)的動態距離 除了上述四點之外,為了要配合乘客的舒適程度,必須考慮在加速度 被限定的狀況下,煞車的時間和距離將會被拉長;以往跟車理論都是以緊 急煞車的加(減)速度判斷最小距離,固定減速度之後,加上末速度已經決 定,因此煞車的時間和距離相對可以求得,而本研究將採取變加速度的車 輛加速度模型,加速度是拋物線的情況下,每一秒鐘的最適距離(和拋物線 二次積分有關)都會不同,因此和傳統最適模型(最適跟車距離)將會有所不 同。我們設定的一般式為: (D )η l t S n V m Dmin = 0 1+ 0∆ ( )− 0 23 (3.1) η ) 23 ( 1 ) ( 1 1 1 max m V n S t l D D = + ∆ − (3.2) 其中 m、n、l 為參數,V 1為自動車的瞬時車速,∆S (t)是搭配拋物線變加速度下自動車煞車的距離,D23是i2 、i3 的動態距離。 3.5 乘客最舒適加速度的概念 文獻以及車流理論,以衝度(jerk)當做舒適度的指標(見 2.2.4),jerk 是 加速度對時間的微分,依照國道客運的標準,乘客能接受的標準界於正負 2.06(m/s3)之間,也就是說,加速度或是減速度的幅度不可超過這個標準, 否則會造成乘客的不適。舉例來說,在一般行車時候,需要加速會緩緩的 踩油門,讓乘客不會一下子有突兀的加速度感,當繼續踩油門,加速度則 會漸增(圖 3.4),有了速度的模型概念,可推知加速度應是類似拋物線的模 型;例如乘坐捷運時,雖然加速度固定,但加速時仍讓人有突兀的感覺; 如果可以先微微加速再加速到需要的速度則可讓乘客感到舒適;乘坐電 梯,一開始也是緩緩上升,到了中段速度才漸漸再加快。因此,為了將自 動車人性化或是乘車舒適,研究將加速度設定為拋物線加速度(圖 3.5),而 非死板的線性定加速度,因此,加速度設定為拋物線曲線;但整條曲線的 斜率又不能大於衝度指標2.06。以加速度來說,拋物線加速度的斜率最大 的地方,是在一開始加速的時候,之後就隨之遞減,也就是說,jerk 最大 的地方是在一開始的時候,依照文獻必須將最大設定在正負2.06,之後隨 著煞車時間或是加油門的時間加長,jerk 會逐漸降低,加速度的斜率會逐 漸變小(圖 3.5),如此ㄧ來,拋物線加速度可以達到如圖(3.4)的效果,這邊 將拋物線的一般式分為加速度以及減速度: γ β α γ αβ α + + = − + − = ( ) ) (t t2 t t t a (3.3) γ αβ α γ β α − − = − − = t t t t t a( ) ( ) 2 (3.4) 其中 α 是拋物線開口大小。β 是加速度需要加執行的時間。γ 是截距,設 定為2.06。
0 2 4 6 8 10 圖3.4 速度對時間 0 2 4 6 8 10 12 0 2 4 6 8 -12 -10 -8 -6 -4 -2 0 0 2 4 6 8 圖3.5 拋物線加速度與減速度 有了加速度的模型,便可以積分反推出速度,速度再對時間積分求得 位移的模型,由(3.3)的加速度一般式反推可以求得如下: 0 0 2 3 4 0 2 3 2 2 6 12 ) ( 2 3 ) ( ) ( S t v t t t t S v t t t t v t t t a + + + + − = + + + − = + + − = γ αβ α γ αβ α γ αβ α (3.5) 由(3.4)的減速度一般式積分則如下: 0 0 2 3 4 0 2 3 2 2 6 12 ) ( 2 3 ) ( ) ( S t v t t t t S v t t t t v t t t a + + − − = + − − = − − = γ αβ α γ αβ α γ αβ α (3.6) 加速度 減速度 速度 時間
除了用拋物線加速度或是減速度之外,考慮如果有後方車輛插入本車 和前車之間,使得本車和插入的車之間的相對距離瞬間縮短,這時會採用 定加減速度(7 m/s2)減速,也就是一般討論的緊急煞車來減速,用這個減速 度求出煞車的長度。而加減速的大小,以及煞車距離的判斷都和模式(3.5) 及(3.6)有關。 3.6 偵測前車團求得末速 自動車在通過事故之前,事故點勢必對自動車造成一定的影響,以往 的跟車理論對跟車的末速判斷都是以偵測到前車的速度為末速,然而,前 車的速度在自動車輛調整速度的過程中,可能隨時會有變化,這樣會造成 加速過度或是減速不足的情況。所以,有兩個解決方法克服這各問題,其 一為距離自動偵測,另一個則是,判斷末速是以到事故距離前的車輛速度 作考慮。本研究的自動車的末速將是參考J.B.Sheu[6]的加速度調整模式, 文中對加速度的調整公式在2.2.3 節中,對此公式稍做修改,將加速度的 部份改為速度調整,也就是說,原本加速度的變化是將前車的加速度和前 方車團的加速度做比重分配,J.B.Sheu 的方法如下(3.7),在 2.2.3 節已有敘 述: 2 2 1 1α α αi =W +W (3.7) 現今要以速度來取代這邊的加速度,所以以
V2
(前車的速度)取代 α1(前車 的加速度),Vσ (在事故範圍之前,偵測器可偵測範圍內的所有車輛平均車 速)取代 α2 (前方車團的平均加速度) 則公式改為 σ v W v W vi = 1 2 + 2 (3.8) 而W1以及W2則維持不變,分別為e
e
e
e
e
e
X X X X X X W W 2 1 1 2 1 2 2 1 − − − − − − + = + = (3.9) 其中X1為i
1車輛車頭到事故發生點的距離,X2代表i
2車輛車頭到事故發 生點的距離,而αi 則被取代為vi,如(圖 3.6):圖3.6 相對距離示意圖 AC i2 1 X 2 X
四、模式架構
第三章已經將模式會用到的概念和模型ㄧ般式在各小節中表示出來, 在這邊將把這些概念完整的串聯,在配合模擬的過程求得驗證。 4.1 加減速度的大小 自動車行駛時,希望能夠控制在等速行駛,而非時常在加速或是減 速,設定等速的範圍在Dmin和Dmax之間,非這個情況下就要加速或是減速(見 3.4 節)。因此,要加減速有三個情況,1.本車和前車距離小於Dmin要減速 2.大於Dmax則要加速3.被超車。減速或是加速的多寡依照上述三種情況做判 斷如下: 1. D12小於Dmin 步驟一:利用vi =W1v2 +W2vσ(3.8)計算求得自動車 i1的末速。 步驟二:將步驟一求得的末速v ,i 代入 2 0 2 3 3 ) (t t t t v v = α −αβ −γ + (3.6) 使vi=α3t3−αβ2 t2−γt+v0,反求出t。 步驟三:將 t 代入a(t)=αt2−αβt−γ 求出減速度a(t)。 2. D12大於Dmax 步驟一:同上,利用vi =W1v2 +W2vσ(3.8)計算求得自動車 i1的末速。 步驟二:將步驟一求得的末速vi,代入 2 0 2 3 3 ) (t t t t v v =−α +αβ +γ + (3.5) 使 2 2 0 3 3t t t v i v =−α +αβ +γ + ,反求出t。 步驟三:將t 代入a(t)= −αt2 +αβt+γ 求出加速度a(t)。 3. 被超車 步驟一:以偵測器偵測超車至前方的車輛車速,當做自動車i1的末速。 步驟二:以等加速度公式vi v2 2as 0 2 = + (初速、末速以及兩車距離為已 知),求出加速度a(t)。 上述情況,除了第三點有利用到兩車距離之外,另外兩點是利用拋物 線加速度所二次積分出來的位移在煞車,煞車距離是否有可能會有考慮不 足,而導致兩車過近的情況,因此,在判斷Dmin及Dmax的時候,就應該考 慮以拋物線加(減)速時可能行走的距離。下節將有最適距離的判定。4.2 最適距離的判斷與決定 在跟車過程,以三輛車為基準,偵測出速度,距離之後,判斷不同的 情境下,適用的距離最小值Dmin,以及距離最大值Dmax,本研究假設了四 種情境,分別放在四個象限說明,如(圖 4.1): -圖4.1 象限圖 (圖 4.1)說明兩個判斷標準: 1. 前車和前前車之間是否有保持人為的跟車安全距離(Dhuman),如果 有,則自動車在跟車的距離可以較接近前車(i2),此情況落在圖形的 二、三象限。如果落在一、四象限,則跟車距離必須拉長。 2. 其次則是要判斷兩車的相對速度,當前車快過本車,則可安心的保持 現有距離或是加速;相反的,如果本車速度大過於前車,則距離就要 有所顧忌。 接下來則是計算Dmin 以及 Dmax,分別以四個象限討論: 第一象限: − +ε × − + ∆ + = 23 2 1 2 2 1 1 min 12 mv S
v
2 7v
nDD
(4.1)v
v
D
D
human 2 1 23 > >v
v
D
D
human 2 1 23 < > Automatic i1 Manual i2 Manual D23 D12 V1 V2 V3v
v
D
D
human 2 1 23 < <D
D
1 max 12 1 min 12D
D
2 max 12 2 min 12D
D
3 max 12 3 min 12D
D
4 max 12 4 min 12 if then if if if then theni
3 thenv
v
D
D
human 2 1 23 > <其中mv1是自動車在判斷時間(m 秒),以 v1的速度會行走的距離。 ∆S 是依照拋物線加速度積分兩次之後所得到的位移。 nD23是前方車輛距離對跟車的影響。 7 2 2 1 2 2 × −
v
v
是以7 m/s2的減速度,減速到和前方車輛相同時,會行走的距離。 ε 是誤差項。 +ε × + + ∆ = 4 2 2 2 1 1 max 12S
v
v
D
m (4.2) 其中mv1是自動車在判斷時間(m 秒),以 v1的速度會行走的距離。 ∆S 是依照拋物線加速度積分兩次之後所得到的位移。 2 224 × v 是前車以 4 m/s2的減速度,減速到靜止,會行走的距離。 第二象限: ε + − × − + = 23 2 1 2 2 1 2 min 12 mv
v
2 7v
nDD
(4.3) 其中mv1是自動車在判斷時間(m 秒),以 v1的速度會行走的距離。 nD23是前方車輛距離對跟車的影響。 7 2 2 1 2 2 × −v
v
自動車以7 m/s2的減速度,減速到和前方車輛相同,行走的距離。 ε 是誤差項。 ε + + ∆ =S
v
D
12max2 m 1 (4.4) 其中∆S 是依照拋物線加速度積分兩次之後所得到的位移。 mv1是自動車在判斷時間(m 秒),以 v1的速度會行走的距離。 ε 是誤差項。 第三象限: ε + − =v
D
D
12min3 m 1 n 23 (4.5) mv1是自動車在判斷時間(m 秒),以 v1的速度會行走的距離。 nD23是前方車輛距離對跟車的影響。 ε 是誤差項。
D
12max3=∆S
+mv
1−nD
23+ε (4.6) mv1是自動車在判斷時間(m 秒),以 v1的速度會行走的距離。 S ∆ 是依照拋物線加速度積分兩次之後所得到的位移。 nD23是前方車輛距離對跟車的影響。 ε 是誤差項。 第四象限:D
12min4=mv
1+∆S
−nD
23+ε (4.7) mv1是自動車在判斷時間(m 秒),以 v1的速度會行走的距離。 S ∆ 是依照拋物線加速度積分兩次之後所得到的位移。 nD23是前方車輛距離對跟車的影響。 ε 是誤差項。 − +ε × − + + ∆ =S
v
v
v
D
D
m n 23 2 1 2 2 1 4 max 12 2 7 (4.8) mv1是自動車在判斷時間(m 秒),以 v1的速度會行走的距離。 ∆S 是依照拋物線加速度積分兩次之後所得到的位移。 nD23是前方車輛距離對跟車的影響。 7 2 2 1 2 2 × −v
v
是以7 m/s2的減速度,減速到和前方車輛相同時,會行走的距離。 ε 是誤差項。 第一象限的情況最為危險,在前車已有可能煞車的情況下,本車的速 度又比前車快,所以需要的最小安全距離也會比其他的狀況來得長,所以 考慮的情況也較為複雜,在第三種情況,前方車輛最不可能減速,所以需 要的最小距離也最短。第二象限的情況雖然本車速度大於前車,但判斷前 車不會立即減速,所以D12min2比第四象限的D12min4小,可用較近的距離跟 車。(圖 4.2)是整各判斷的流程架構。N N N N Y Y Y Y a=0 a=0 Y N N N N N Y N Y Y 計算 D2min D2 max D12≧D人 D12≧D人 V1≧V2 計算 D4min D4 max
D2min≦D12≦D2max D4min≦D12≦D4max
D12<D2min D12>D2max D12<D4min D12>D4max
計算V末 計算V末 計算V末 計算V末 V1≧V末 V1≧V末 V1≧V末 V1≧V末 V2≧V3 N Y Y a<0 a>0
29 N N N N Y Y Y Y a=0 Y Y Y N N N N Y Y N N N N Y 計算 D1 max V1≧V2 V1≧V2 計算 D3min D3 max D3min≦D12≦D3max D3min≦D12≦D3max D12<D2min D12<D3min D12>D2max D12>D3max 計算V末 計算V末 計算V末 V1≧V末 V1≧V末 V1≧V末 V2≧V3 計算 D3min D3 max 計算 D1min D1 max D12≧D1max D1min≦D12≦D1max D12<D1min D12>D1max 計算V末 計算V末 V1≧V末 Y a<0
a>0 a=0 a=0 a<0
a=0 a=0
a=0
a>0
a=0
a<0 a=0 a=0 a>0 D12≧D人
五、情境模擬
本章將使用Turbo C 程式語言模擬第四章所表示的四個象限,也就是 在各種情況下,最適當距離的判斷,以及使用到的拋物線加速度減速和加 速,驗證模式的可行性,適時的修改模型,討論模式可行性,補足模型缺 漏和思慮不周的地方。 5.1 程式撰寫 考慮到模擬的逼真性,原本希望使用車流模擬器模擬,但由於車流模 擬器無法針對單一車輛控制,而且在函數被限定以及程式碼有限的狀況 下,採用最原始的程式語言C 語言做動態模擬,期望達到 ITS 需要的動態 化、即時化、隨機化的目標。 5.1.1 程式撰寫流程 程式希望藉由自動車之前的手動車輛隨機變動速度或是藉由給定的 加速度,讓在後面的自動車輛能夠經由程式,判斷跟車所要使用的模式, 以及用給定的拋物線加速度跟車,且要動態表現出車輛的行為,流程圖如 (圖 5.3),解說如下: 1. 建立高速公路及事故系統:撰寫副程式 road(void ),繪出高速公路三 車道的圖形,詳見5.1.2。 2. 設定車輛初始位置:藉由 int vehicle_location()函數,分別在不同情境, 以顏色區隔自動車和手動車的差別,並且讓車輛由不同位置出發,詳 見5.1.2。 3. 車輛相關資料輸入:已經有車輛的位置,輸入手動車輛的相關數據, 車速,加速度,和計算一秒鐘會行走的位移,由副程式Vehicle2()表示。 4. 模擬時間:藉由迴圈的設計,跑ㄧ次程式為間隔一秒鐘,一直到設定 的秒數n 秒才會終止迴圈。 5. 計算自動車輛的末速:計算末速之後,可以決定要加速度,或是減速 度,並求出如果執行拋物線加速度或是拋物線減速度的時間,也就是 模式加速度的係數 β。求出 β 後就可以間接求出 α。(為了滿足衝度要 求要小於等於2,α*β 必須等於 2),計算時間的副程式為 float beta( )。 6. 模式選擇:由於已經有前方車輛的資訊,判斷距離、相對車速,選擇 四種狀況之一種應該使用的模式,確定模式後,計算此模式的Dmin或是Dmax。 7. 再判斷自動車和前車距離是否小於或是大於 Dmin或是Dmax:如果在範 圍內,則選擇等速度前進,如果大於或是小於,則使用拋物線加速度 加速或者是減速。 8. 資料蒐集:每一秒鐘執行的兩車速度、兩車距離、位移、Dmin 或是 Dmax ,可以回傳到記事本上,加以分析 9. 執行下一秒:跑下一圈迴圈。
圖5.3 程式流程圖 模擬開始 車輛相關資料輸入 Vehicle2() 建立高速公路及事故系統 void road(void ) 建立車輛初始位置 int vehicle_location() 計算加減速度執行的時間 float beta()
v
v
D
D
human 2 1 23 < < 模式判斷 for(i=0;i<n;i++) n 為模擬時間 決定適用的Dmin()以及 Dmax() d(兩車距離)<Dmin d(兩車距離)>Dmax 是 否 決定速度v 以及位移 x 決定速度v 以及位移 x 當i=40 模擬結束5.1.2 繪圖程式 模擬所需要用到的背景在高速公路,使用C 語言中的<graphics.h>函式 庫繪出三車道的高速公路,其中內側車道為自動控制車輛車道,並且此車 道上有事故發生,以條紋斜線表示事故,一個像素長度假設為一公尺,螢 幕可以放置最大圖形為 640*480,故按比例,整條公路路徑為 640 公尺, 事故位置位於左邊數來五百八十公尺至六百公尺處,如(圖 5.1): 圖5.1 車道 除此之外,自動車輛我們以黃色作為表示,人為操縱車輛以綠色作為 表示,初始以三輛車作為模擬對象,試驗模式在三輛車時的正確性,故三 輛車在混合車道上,設定在第二車道,車與車的距離暫時不設定,車長占 圖形五個點,為五公尺,寬占兩個點,如圖5.2 示: 圖5.2 車輛 5.1.3 距離判斷 要判斷 i1和 i2之間的距離(D12)是否少於 Dmin或是大於 Dmax,要判斷 Dmin或是 Dmax需要計算拋物線加速度位移S,S 要有加速的總時間(β)來計 算,所以要先求出β,求 β 需要知道自動車輛(i1)的末速,求出末速後, 利 用公式 2 2 0 3 3 ) (t t t t v v = α − αβ −γ + ,知道v(t)和v0解聯立方程式求出t,也就是 β; 如果求出的末速度和初速度相同時,這時求出的 β 會等於 0,此時求不出 位移 S,S 的使用時機主要是針對前車速度較慢,為了使用拋物線減速而 設定,減速度最大值是 2m/s2(一般緊急煞車減速度是 7m/s2),固計算出 S 其實是相當大的(加速度大小和位移多寡成反比)。所以如果前車速度較 快,Dmin或是Dmax則不放入S 變數。也就是(圖 4.1)中的第三和第四象限。 黃色 藍色 藍色
將四種象限的自動車輛判斷距離使用四個函數在程式中表示: 1. D_min1: ε + − × − + ∆ + = 23 2 1 2 2 1 1 min 12 mv S
v
2 7v
nDD
(5.1) Dmin=0.05*v1+S+((v1+v2)*(v1-v2))/14-0.002*(20+average-decrease) (5.2) 在(5.1)中,為原先設定之 Dmin1模式,對照(5.2)之程式,m 假設為 0.05, n 假設為 0.002,D23是(20+average-decrease),i2車輛車尾所在位置為圖形 (105+decrease)處,i3車頭所在位置為圖形(125+average)處,其中”decrease” 變數初始為零,隨時間而增加,代表i2每一走秒之後的位移,”average” 變 數初始也為零,隨時間而增加,代表i3每一走秒之後的位移,兩者相減即 為兩車距離,也就是 D23。S 為使用拋物線減速度行走的位移,也就是當 0 0 2 2 3 6 4 12 ) (t t t t v t S S =α −αβ −γ + + 在t=β 的情況下,也就是 S(β),又 α*β=2(見第三 章),程式中寫法為 S=(-pow(B,3))/6+v1*B;其中 B 就是加速度需要加執行 的時間,就是在公式(3.4)中,a(t)=αt(t−β)−γ =αt2−αβt−γ的β。此為(圖 4.1) 的第一象限。 2. D_min2 − +ε × − + = 23 2 1 2 2 1 2 min 12 mv
v
2 7v
nDD
(5.3) Dmin2=0.05*v1+S-0.002*(20+average-decrease); (5.4) (5.3)是原先設定的公式,在程式中(5.4)的函數卻加入了位移 S,因為 在此種狀況下前車的速度較慢,在本節前面有提到過,只要前車較慢,Dmin 將加入S。m 和 n 依然使用 0.05 和 0.002。此為(圖 4.1)的第二象限。 3. D_min3D
12min3=mv
1−nD
23+ε (5.5) Dmin3=0.05*v11-0.002*(20+average-decrease); (5.6) 此為(圖 4.1)的第三象限。 4. D_min4D
12min4=mv
1+∆S
−nD
23+ε (5.6)Dmin4=0.05*v11+pow(v1,2)-0.002*(20+average-decrease); (5.7) (5.6)是原先設定的公式,在程式中(5.7)的函數則不加入 S,因為前車 的速度較快。m 和 n 依然使用 0.05 和 0.002。此為(圖 4.1)的第四象限。 5.1.4 程式 程式撰寫如附表一 5.2 情境模擬與分析 針對(圖 4.1)的四個象限,針對每一種象限做個別的情境模擬,判斷每 個象限的Dmin或是Dmax是否合理,距離會不會過大,使得後車可以超越或 是鄰近車道車輛超車;如果距離過小,前車緊急煞車,Dmin是否足夠而不 至於撞車。將初始值設定為各象限所假定發生的情況,以下為各情境的模 擬過程及數據分析。 5.2.1 情境一 在第一象限中,由於前車(i2)和前前車(i3)的距離過近,又本車的速度 大於前車,也就是D23<Dhuman,v1>v2。在模擬中,設定開始的位置,(i1)、 (i2)和(i3)的 x 座標分別為(i1)=10、(i2)=100、(i3)=125 作為起始,初始速度(v1) 為20m/s,(v2)=18m/s、(v3)=18m/s=65km/h,如(圖 5.4): 圖 5.4 情境模擬一 設定跑三十秒,如果程式在某一秒有使用到模式 1(Dmin1),則會隨著 數據回傳到文件,因此便可以判斷在使用模式1 時是否有錯誤。結果如表 5.1: i1 i2 i3
表5.1 模擬情境一 秒 v1 v2 i1每秒 x 座標 位置 i2每秒x 座標位 置 兩車在 前一秒 位置差 距(d) Dmin 1 20 15 25 119 95 81.23721
2 20 14 45 134 94 87.658325 here use model1 3 19.13608 12 63 149 89 97.62539
4 19.13608 13 82 161 86 83.45139
5 19.13608 17 101 172 79 50.832508 here use model1 6 18.29322 13 118 191 71 83.42539
7 18.29322 14 136 204 73 67.18501 8 18.29322 15 154 218 68 59.04187
9 18.29322 16 172 233 64 48.799500 here use model1 10 17.48567 14 189 250 61 67.16101
11 17.48567 16 206 263 61 33.747795 here use model1 12 16.67812 13 222 280 57 64.17597
13 17 17 233 291 58 20.58845
14 17 15 250 309 58 44.487267 here use model1 15 16.19245 13 265 325 59 61.25695 16 16 16 277 337 60 19.40587 17 17 17 293 353 60 18.94171 18 17 16 310 370 60 31.63998 19 18 18 325 385 60 21.34286 20 18 17 343 403 60 33.55689
21 18 17 361 420 60 33.556889 here use model1 22 17.19245 14 377 438 59 65.31249
23 17 17 390 451 61 21.814503 here use model1 24 16.17213 12 405 470 61 67.1994
25 17 17 415 480 65 19.323883 here use model1 26 16.17213 12 430 499 65 67.1854 27 16.17213 13 446 511 69 51.25685 28 16.17213 12 462 524 65 58.10788 29 16 16 472 534 62 19.28788 30 16 12 488 552 62 57.08142 在分析時先用前六秒鐘分析,因為在初始值就設定此種情境的狀況, 所以前面的秒數較容易顯示第一象限的狀況,前六秒鐘速度一直都是