行政院原子能委員會
委託研究計畫研究報告
電漿火炬電源非線性且隨機控制的研究
A Study of Nonlinear and Stochastic Behavior in Plasma Torch
計畫編號:972001INER019 受委託機關(構):國立交通大學 電機與控制工程學系 計畫主持人:廖德誠 教授 核研所參與人員:李恆毅、黃世文 聯絡電話:(03) 5712121 ext. 54363 E-mail address:[email protected] 報告日期:中華民國 97 年 12 月 23 日
目 錄 目 錄... I 中文摘要... 1 英文摘要... 2 壹、計畫緣起與目的... 3 一、計畫緣起... 3 二、計畫目的... 5 三、研究項目與進度... 7 貳、研究方法與過程... 8 參、主要發現與結論... 13 一、直流電漿火炬動態模型之建立...13 (一) 雙對流理論 ...14 (二) 直流電漿火炬之數學模型 ...18 二、模擬及分析電漿火炬非線性之動態特性...33 三、協助建立井式電漿火炬混沌參數量測儀器之實驗平台...68 四、井式電漿火炬混沌參數之初步量測與資料分析...75 五、電漿火炬混沌現象成因之分析與探討...91 六、混沌信號判斷方法及控制對策...92 七、結論...93 肆、參考文獻... 96
中文摘要 本計畫擬配合原能會核研所之研究,探討井式電漿火炬之非線 性特性,並驗證理論分析成果之成效。在近年來已發表文獻中指出, 大氣電弧電漿裝置之顫動現象可能為混沌動態行為。此研究結果指 出,電漿火炬之顫動現象可能為混沌行為而非隨機行為,而這樣的 動態行為是有可能被控制的。由過去的研究發現,混沌動態行為有 可能是因為系統不穩定周期性行為所衍生的,如果這些不穩定周期 性行為發生的成因能夠被探討並加以控制且使其穩定化後,將可消 除電漿裝置的顫動現象以改善系統之性能。本計畫應用分叉理論及 非線性控制理論針對井式電漿火炬之非線性特性加以探討,找出其 造成系統混沌現象的成因,並探討混沌現象發生的可能條件。此外, 本計劃也協助核研所之井式電漿火炬實驗平台的建立與量測資料分 析以初步確認理論分析之成果。
Abstract
It is known that a DC power-driven plasma torch might exhibit random behavior which might affect the performance of the torch. A recent study shows that such a random behavior phenomenon might be a deterministic type chaotic behavior. One of the major goals of this project is to verify such a finding. In the project, we have cooperated with the researchers from the Institute of Nuclear Energy to work on the dynamical study of the well-type DC power plasma torch. First, an analytical model was derived from theoretical point of view. It was followed by the dynamical analysis of the derived system model via the help from general nonlinear system theory. Numerical studies of the plasma torch’s behavior were also carried on by using the code Matlab and AUTO. Moreover, we have worked with the researchers from the Institute of Nuclear Energy to build up a test-bed for well-type DC power plasma torch for experimental study. A preliminary of sensor measurement, data collection and numerical analysis of the experimental data were also covered in the proposed tasks.
壹、計畫緣起與目的 隨著科技的日新月異,人類的生活因科技的進步而愈來愈便 利。然而,科技產生的污染與廢棄物未因時代的進步而減少,反 而造成許多無法處理的污染源與垃圾。目前,一般的廢棄物處理 最常使用高溫燃燒與垃圾掩埋的方式,利用高溫燃燒將垃圾體積 縮小以便於提高垃圾掩埋場的使用年限。但是高溫燃燒會產生有 毒氣體與灰渣,且垃圾掩埋場會造成人民的抗爭與場地的限制, 甚至可能造成土地二次污染。高溫電漿火炬的開發即是解決廢棄 物處理的有效方法之一。因此,為了解決廢棄物處理問題,本計 畫配合國家「電漿焚化熔融處理有害廢棄物產業化應用與發展」 施政目標,探討高功率直流電漿火炬的動態行為且分析高溫電漿 火炬目前尚須改善的問題,以提升國家環境保護技術,朝零廢棄 物的目標發展。 一、計畫緣起 在地球上,物質大部分是呈現固態、液態和氣態。當物質 為氣態時,電子在電場束縛下圍繞原子核旋轉,若氣體被加熱, 其電子的熱運動動能就會增加。持續加熱至電子的熱運動動能 超過原子核對它的束縛,電子就成為自由電子,這種過程稱之 為電離。若氣體之電離度為 100% 時,即氣體被完全電離,則 氣體就會游離成電漿。電漿依溫度與用途可分為熱電漿(Thermal Plasma)和冷電漿(Cold Plasma),本計畫以熱電漿系統為研究 重點。電漿火炬則為熱電漿源的一種;電漿火炬中心的溫度高 達攝氏一萬度以上,其熱輻射可使熱傳效率優於傳統火焰,大
部分所有的物質,在這種高溫之下會裂解成簡單的原子,甚至 難以破壞的碳氫化合物,包括多氯聯苯,也會被分解成簡單無 害的氣體。因此,處理灰渣熔融,高濃度廢溶劑、低放射性廢 棄物及低濃度有害廢氣時,電漿火炬也都可以有效的處理且安 全固化焚化爐所產生之高污染灰渣。 近年來,工業上已廣泛的使用電漿裝置,例如:處理廢棄 物、電漿噴塗、半導體製成等等。然而,不同用途的電漿裝置 內部顫動(Fluctuation)現象會影響系統的使用效能與使用週 期。雖然已有許多相關的研究文獻探討電漿火炬的顫動現象, 但仍侷限於實驗觀察與分析,對於不同電漿裝置內部顫動現象 的分析與了解仍有待深入探討。在過去的研究,分析與探討電 漿火炬之動態行為仍以實驗量測為主,改善顫動現象的效果有 限且必須花費相當多的設備成本才能量測到狀態之數據。因 此,學者開始朝數學理論發展,建立電漿火炬之數學模型,希 望藉由數學理論分析判斷與估測影響電漿火炬使用效率的原 因。研究學者依據電漿火炬之物理特性開始建立系統之數學動
態模型,透過能量守恆理論推導出 PDE (Partial Differential
Equation) 形式之數學模型。然而,PDE 形式之數學模型並不易 求解與分析,利用數值方法求解也必須仰賴高速電腦進行平行
運算才能縮短計算時間與誤差。在 2000-2004 年,印度學者
Ghorui、Sahasrabudhe、Murthy, Das 和 Venkatramani 則引用三對 流(Triple Convection)理論推導電漿火炬之數學模型,其目的是 將在空間變化的系統狀態投影至時間變化的非線性三階振幅方 程式。如此一來,即可引用發展成熟的系統分析理論探討電漿
火炬之動態行為且擬定電漿火炬之性能改善對策。另外,學者 Ghorui, Sahasrabudhe, Murthy, Das 和 Venkatramani 透過三階振幅 方程式與實驗量測發現電漿裝置內部顫動現象可能是一種混沌
動態行為(Chaotic dynamical behavior)。學者提出顫動現象並非
以往認知的隨機行為而是會呈現週期性變化的混沌現象,電漿 裝置內部的顫動行為就有可能可被控制以改善其特性。但從非 線性理論分析三階非線性振幅方程式之結果發現,仍有其他因 素可能使電漿火炬進入混沌行為。因此,顫動現象之成因須再 深入探討,並分析使電漿火炬發生顫動現象的各種可能發生之 原因。這些研究結果將可提供更完善的理論依據以避免系統發 生不可預期的結果。 二、計畫目的 近年來,電漿火炬已被廣泛的應用於各種不同的工業用途, 例如電漿噴塗、線電弧噴塗、電漿化學蒸汽沈積(CVD)、電漿 粉末合成、有毒廢棄物分解、珠化處理、電漿熔融、電漿精鍊 及奈米製成等。然而,受限於電漿火炬系統本身之硬體架構, 系統仍有許多問題尚待解決且電漿火炬的動態分析仍以實驗量 測為主,實驗流程往往需花費相當多的時間與成本。另外,高 溫電漿火炬的內部動態為三度空間中的流體變化,其物理與化 學反應相當複雜,且火炬的內部與外部溫度相當高(約可產生 5,000~20,000℃),實驗數據不易量測。因此,透過實驗量測往 往無法有效分析其行為特性。基於上述考量,近年來之相關研 究文獻開始建立數學分析模型本以探討電漿火炬之動態特性。 在數學理論方面,研究文獻建立偏微分方程式(Partial Differential
Equation, PDE)形式之數學分析模型以探討電弧電漿之動態行 為。然而,PDE 之動態模型不易求解,數值分析往往需要透過 高速電腦進行平行運算且邊界條件、程式撰寫及相關參數設定 會影響準確度。 在2000-2004 年,學者 Ghorui、Sahasrabudhe、Murthy、Das 和Venkatramani 則是將 PDE 形式之動態方程式投影至常微分方
程式(Ordinary Differential Equation, ODE)。研究學者將空間變化 之系統狀態投影至時間變化之振幅方程式,動態行為之特性探 討就可引用系統分析理論解釋電漿系統之顫動行為。其振幅方 程式表示如下: 3 0 1 2F F F F
F&&&+Ω &&+Ω & +Ω =−
透過文獻之模擬分析與實驗驗證發現電弧電漿裝置弧根的 顫動現象可能是一種混沌動態行為(Chaotic dynamical behavior) 而非以往認知的隨機行為,則電漿之顫動行為可能可以經由控 制來改善其特性。在模擬分析方面,學者Ghorui、Sahasrabudhe、 Murthy、Das 和 Venkatramani 則是藉由改變系統參數Ω0發現當 系統參數進入某一個範圍內會發生混沌現象。然而,從文獻建 立的三階非線性振幅方程式發現混沌現象的發生可能不只Ω0改 變,即Ω1與Ω2的改變也可能使系統發生混沌行為。因此,造成 混沌現象的參數範圍仍需再深入分析以找出使電漿系統發生顫 動現象的原因。 本計畫之主要目的是建立可量測混沌參數之非線性混沌分 析模型,並且分析其熱電漿火炬之動態特性。另外,協助架設 井式電漿火炬參數量測之實驗平台,並且透過實驗初步量測火
炬之數據。引用系統分析理論初步分析量測之數據及分析電漿 火炬之顫動現象。最後,提出混沌行為之判斷方法與控制對策 以提供日後相關研究者之參考依據。 三、研究項目與進度 本計畫之研究工作主要在於分析直流電漿火炬之顫動現 象,其研究項目如下所示: 1. 建立電漿火炬可量測混沌參數﹙包括電壓、電流、聲音、光 線強度等﹚之非線性混沌分析模型。 2. 根據上述建立之模型,模擬及分析電漿火炬非線性之動態特 性。 3. 協助準備及建立井式電漿火炬混沌參數量測儀器之實驗平 台。 4. 井式電漿火炬混沌參數之初步量測與資料分析。 5. 電漿火炬混沌現象及成因之分析與探討。 6. 提出混沌信號判斷方法及控制策略。
貳、研究方法與過程 本計畫的主要目的是藉由數學理論分析直流電漿火炬顫動行 為的成因,也探討直流電漿火炬可能發生的動態特性。在過去,電 漿系統內部的顫動現象被認定為隨機的動態行為而無法估測其系 統狀態。然而,近年有研究文獻提出電弧電漿裝置之顫動現象可能 為混沌行為而非以往認知的隨機行為,則系統之顫動現象可能可以 經由控制改善火炬的性能。本計畫利用非線性理論與分叉理論探討 電漿火炬之顫動現象,分析可能使系統發生混沌現象之分叉參數的 變化以及分叉參數的變化範圍。以下說明此計畫之研究方法與過 程: 1. 建立電漿火炬可量測混沌參數之非線性混沌分析模型 為了能分析電漿火炬之動態行為,必須先建構電漿火炬之 數學模型,以方便對直流電漿火炬系統之模擬及分析。然而, 電漿火炬之動態會隨著空間和時間變動,經由電磁理論與守恆 定理推導之數學模型為PDE 形式。PDE 形式之動態方程式不易 求解,且電漿火炬之 PDE 數學模型可能無法直接引用系統分析 理論與控制理論。若透過數值方法求PDE 之解,則必須依賴高 速平行電腦計算且可能會造成計算時間過長與誤差過大,將 PDE 形式之數學方程式投影至 ODE 形式數學動態模型是必要 的。因此,本計畫依據P. H. Coullet 和 E. A. Spiegel 提出之 normal form 理論、雙對流理論以及系統物理特性,透過數學推導以建
構系統分析模式。經由normal form 理論與雙對流理論可以建構
2. 依據建立之模型,模擬及分析電漿火炬非線性之動態特性 此部分主要是針對建立之數學分析模型探討直流電漿火炬 之動態行為,探討系統之動態特性。實際系統在運作時,往往 受限於本身的物理特性與硬體架構而無法完全理想化操作。當 系統操作在極限邊緣時,系統之動態可能會因參數稍微變動而 使系統由穩定狀態改變為不穩定或發生振盪週期。探討系統參 數之變化與系統動態行為之間的關聯性可以避免系統改變穩定 性。因此,本計畫應用非線性理論及分叉理論以推導系統之靜 態與動態工作解及其成立之系統參數解析條件。另外,我們應 用非線性系統模擬軟體,例如:Matlab 及 Auto,以驗證理論推 導之成果及 non-local 系統靜態與動態特性。對系統的分叉現象 分析,我們採用Auto 這套數學軟體來繪製系統之分叉圖,分析 系統可能發生的動態特性。另外,研究文獻提出電弧電漿裝置 之顫動現象可能為混沌行為,但文獻中僅考慮單一參數變化之 動態分析;本計畫則考慮系統可能發生混沌現象之原因,且找 出改變系統穩定性的參數範圍。我們也探討學者 A. K. Das 沒有 分析的系統參數以及模擬可能之動態特性;從分叉圖可以知道 系統動態發生改變的範圍。接著,此部分選取分叉圖上每個區 域之分叉參數繪製時間響應圖和相位圖,模擬系統之動態特性 以及震盪週期之變化。 另外,為了探討發生混沌現象之成因,我們透過雙參數分 叉理論探討二個參數同時發生變化之系統動態特性。我們也選 取雙參數分叉圖上每個區域之分叉參數以及選取系統初始值繪 製時間響應圖和相位圖,驗證系統之動態特性以及振盪週期之
變化。 3. 協助準備及建立井式電漿火炬混沌參數量測儀器之實驗平台 除了理論分析工作之外,在本計畫中,我們透過與原子能委 員會核能研究所物理組同仁之合作,協助架構相關的實驗設備, 並以實際系統之實驗量測數據來評估理論分析之成果。茲簡述如 下: (1) 本計畫透過與原能會核研所物理組討論直流電漿火炬實驗平 台之操作範圍與量測儀器之使用規格和限制,規劃直流電漿 火炬的相關實驗平台。 (2) 協助建立一適當的量測系統 在此部分之工作重點在於建立實驗平台,實驗設備包含 直流電漿火炬平台以及量測系統,例如:架設紅外線測溫儀 觀察火炬的溫度變化、架設電壓電流探棒、架構流量計量測 直流電漿火炬內部的流量變化、架設麥克風接收直流電漿火 炬的音波以及設計ADC將擷取資料存入電腦以提供日後分 析。 量測儀器之架構方面,本計畫主要是針對電漿火炬之顫 動現象探討,架設之重點放在電壓、電流、光和聲音之訊號 量測,藉由實驗量測之數據以利於系統之模擬驗證。 (3) 評估量測相關的周邊系統之操作特性以及確認各項儀器之使 用規格,例如:最大氣體流量、磁場、音波量測、溫度量測 之範圍、外加電流或外加電壓。確認量測平台之操作範圍以 及儀器規格可以提高實驗數據之準確性,避免擷取到錯誤資 料。
4. 井式電漿火炬混沌參數之初步量測與資料分析 此部分主要是經由實驗量測數據初步分析直流電漿火炬發 生的顫動現象,找出影響直流電漿火炬產生顫動的主因,以便 於日後研擬控制對策與設計。在實驗量測方面,本計畫擷取電 壓、電流、光和聲音之實驗數據,透過時間響應和頻譜分析系 統之動態特性。從實驗結果可以觀察到電壓、電流、光和聲音 均有顫動行為的發生,頻譜分析也顯示系統會發生週期變化。 5. 電漿火炬混沌現象及成因之分析與探討 此部分之工作重點是經由數學理論分析可以評估直流電漿 火炬可能發生混沌現象的成因。本計畫希望透過非線性理論和分 叉理論探討系統可能發生混沌行為的分叉參數變化以及參數範 圍。因此,我們建構系統分叉圖以估測造成混沌行為的可能原 因,並模擬分析電漿火炬之時間響應圖和相位圖觀察系統的動態 特性。另外,除了電漿火炬之混沌行為,本計畫探討系統可能產 生的其他動態特性,例如:電漿火炬之動態行為從穩定狀態改變 至振盪週期的特性分析,最後進入混沌現象到系統狀態發散之參 數變化。 6. 提出混沌信號判斷方法及控制策略 已知高溫電漿火炬之物理特性相當複雜,系統狀態並不易 量測且數據擷取受限於量測儀器之使用規格而無法精確量測實 驗數據。然而,學者A. K. Das 提出顫動現象可能為一混沌行為, 那電漿火炬可能可以控制改善其性能。從數學理論分析結果可 以預估混沌現象的系統參數範圍;當分叉參數值開始減少且選
取特定區域的系統初始值會導致系統由穩定狀態轉變為一倍週 期之振盪行為,在由一倍週期依序轉換成二倍、四倍和八倍週 期,最後進入混沌現象到系統狀態發散;由數學理論估測分叉 參數之變化範圍,監控系統動態之變化以避免進入混沌行為。 另外,混沌現象是一個奇特的動態行為,系統進入混沌行為時, 狀態會呈現有界且不規格之週期變化;這種動態特性會造成無 法預估系統之行為,即無法控制。因此,此部分之研究方法必 須依據上述之數學理論分析發生混沌行為的參數範圍,設計監 控系統與控制器補償系統狀態以避免產生不規則之週期變化。
參、主要發現與結論 本計畫之研究方法與過程主要是針對直流電漿火炬建立數學 分析模型,並透過非線性理論與分叉理論分析直流電漿火炬之顫 動現象。另外,本計畫也考慮可能使系統發生混沌現象的其他因 素,探討發生混沌行為的各種可能性,並與學者 A. K. Das 之研究 結果做比較。依據非線性系統分析之方法,搭配分叉理論可以發 現其他參數也發生變化時,其他的系統參數仍會因變化而產生分 叉現象,即系統可能發生混沌的動態行為。因此,本計畫之研究 成果提供其他可能發生混沌行為之系統參數範圍與其他可能因 素。 在實驗方面,我們依據核研所現有的直流電漿火炬系統協助 建立實驗之量測硬體架構,且針對系統之數據量測提供相關意見 與建議。另外,透過核研所物理組安排實驗並初步量測相關數據, 本計畫引用系統分析理論初步分析量測數據與探討火炬之動態行 為。最後,藉由理論探討與實驗初步量測分析之結果提出直流電 漿火炬發生顫動現象的可能原因與初步研擬控制對策,以提供未 來火炬效能改善之依據。以下將逐一說明本計畫之研究成果。 一、直流電漿火炬動態模型之建立 直流電漿火炬系統動態模型是經由能量守恆、金屬守恆、 動量守恆、質量守恆以及 Maxwell 理論所建立,並搭配符合實 際物理意義設定邊界條件。建立之數學模型是考慮在空間中變 化,即數學分析模型是以偏微分的形式呈現。PDE 形式之動態 模型不易求解且無法有效擬定改善對策。因此,本計畫依據 P. H.
Coullet 和 E. A. Spiegel 以及 A. K. Das 提出之理論推導以時間變 化為基礎之非線性振幅方程式。另外,A. K. Das 提出的研究成 果僅討論單參數變化造成混沌現在之參數範圍,而本計畫利用 非線性理論與分叉理論分析直流電漿火炬數學模型,探討其他 可能發生變化之系統參數與混沌動態行為之間的關聯性。最 後,分析模擬之結果與A. K. Das 提出之成果作比較。 (一) 雙對流理論 雙對流理論是P. H. Coullet 和 E. A. Spiegel 於 1983 年所提 出,其構想是建立以時間變化為基礎之動態方程式,以利於引 用系統分析理論探討其動態特性。雙對流理論是將數學模型正 規化,經由數學投影簡化成正規形式。因此,本計畫利用正規 化理論將PDE 形式之直流電漿火炬數學模型簡化為 ODE 形式 之非線性振幅方程式。 首先,考慮一非線性方程式 ) (U N U M U t = λ + λ ∂ (1) 其中 t 表示時間、λ=(λ1,λ2,K,λp)表示 p 個參數的集合、 ) , , (U1 Up U = K 則表示定義在實函數空間的系統狀態以及Mλ 和Nλ分別表示線性和非線性操作子(Operator)且Nλ(U)至少為 二次式。當Mλ和Nλ包含空間微分,我們可以將邊界條件指定 為 0 ) ( = + λ λU C U B on ∂V (2) 其中 V 表示物理空間(Physical Space);Bλ和Cλ分別表示線性 與非線性操作子。假設Mλ的頻譜為離散的。為了簡化表示,
我們僅考慮在非退化之頻譜。首先,假設此問題為同次的 (Homogeneous),則可以得到下列形式的解 k t e U = ηΦ (3) 其中 ) , ( ) , ( ) , ( 2 2 1 1 k x W k x W k x W N k N k k k Ω Ω Ω = Φ M (4) k L Ω 為常數且WL為位置函數。當(1)為 ODE 時,則WL =1, N L=1,2,K 。向量 k 表示用來描繪空間架構函數WL的參數集 合。對於每一個 k,(1)和(2)可以簡化為特徵值問題 Mλ|k Φk =ηΦk (5) 和 Bλ|k Φk =0 on ∂V (6) 特徵方程式則可以為下列之形式 ( ; ) ( ) 1 0( ) 0 1 λ η + + λ = + η ≡ λ η − − k N k N N N k a a P L (7) 對於(7)的每一個根,我們可以找到振幅 k i Ω 以及相符合的正規 形式Φk。因此,將(7)整理後可以得到 (η;λ)≡
∏
(η;λ)=0 k N k P P (8) 假設(8)有 l 個零根(η=0)和 m 對虛根(Reη=0和Imη≠0),則(8) 有 d =l+2m (9) 個Reη=0的根。這些 d 個根則稱為 critical。假設在λ0附近的Δ 區域內,系統存在有很小的|Reη|及系統的其他根(Reη≤η0 <0) 也在Δ區域內,其中η0為實常數;則ODE 形式的(1)之解則可能使η0 →−∞。在(8)中我們可以在Δ區域找到二種可能性的多 項式:一種是degree 為 d 且根為 critical 的多項式(λ=λ0),此 多項式稱為critical polynomial;另外一個多項式則是根在Δ區 域從虛軸遠離。因此,若考慮最簡單的例子:l =1和m=0, critical polynomial 則為η+μ0k(λ),在此情況會發生靜態分叉 (Stationary Bifurcation);另外,當l =0和m=1(即d =2),則會
發 生 Hopf bifurcation , 其 中 critical polynomial 為
) ( ) ( 2 1 2 +μ λ η+ω λ η k 。考慮d =2的情況下,定義 codimension 2 表面之條件 μ1(λ)=0 k 和 0 ) ( 0 λ = μk (10) 考慮一般式,存在有n=l+m個critical 條件定義 codimension n 的表面,則將此表面稱為polycritical surface。當我們可以將問 題簡化為ODE 時,求得的解(隨時間變化)會接近 polycritical surface。 接著,我們將依據 polycritical surface 簡化問題。假設(1) 存在有polycritical surface [μi(λ);ωj(λ);η]=0 C P , i=0,1,K,n−1, j =0,1,K,m−1 (11) (11)有 l 個η=0的根和 m 對η=±iωj 的根。因此,系統的 polycritical surface 有 d =l+2m 個 critical modes 且 有
codimension n=l+m。假設有任意點λ=λ0存在於 polycritical
surface , 從 (3) 可 得 到 generalized critical modes φi ,
d
i=1 ,2,K, ;modes 的集合構成了 generalized critical surface 的
基底(basis)。這些集合從(3)提供了完整的 stable modes fj。因 此,U 可以分成二部分:一個是 generalized critical space,另
外一個為stable space。我們將 U 改寫成以下之式子:
∑
∑
= β + φ α = d i j j j i i t x t f x t x U 1 ) ( ) ( ) ( ) ( ) , ( (12) (1)則可以寫成 α& =Jα+F(α,β) (13) β&=Lβ+G(α,β) (14) 其中 J 和 L 為矩陣且 F 和 G 為非線性函數。非奇異矩陣 (nonsingular matrix)L 的所有特徵值均在負實部,而 J 有零實部 且 J 為 Jordan form。接著,引進非線性轉換 β=b+B(α), ∂αB|α=0=0 (15) 將(15)帶入(14),則可以得到 L b LB (J ) B F( ,b B) B G( ,b B) dt d = − α ∂ − α + ∂ + α + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − α α (16) 若可以選擇 B 使得 (Jα∂α−L)B=−F(α,B)∂αB+G(α,B) (17) 則b=0定義為(13)和(14)的不變流形(invariant manifold),且對 於很小的|α|,此不變流形是線性穩定的。將 β B= (α) (18) 帶入(13),則可以得到 α& =Jα+F(α,B(α)) (19) 因此,對於μ≡(μ0,μ1,K,μn−1)=0,我們可以知道系統有 n 個振 幅方程式(amplitude equations)存在使得(17)可以求解的,即可 以利用perturbation 理論求解。 當根離開 polycritical surface 時,(19)可以變形為 α& =Kμα+hμ(α) (20)其中Kμ表示當 J 的所有 elements 在擾動以及hμ則表示為非線 性向量(vector-valued)函數,即K0 =J ,Kμ 的特徵方程式為 critical polynomial C P 。 C P 有 d 個參數;一般來說,Kμ有d2個 參數。我們要將Kμ放入正規形式且包含最少的參數。因此, 可以利用以下非奇異之座標轉換得到上述結果: A=C−1αC (21) 另外,J 的變形則稱為 Jordan-Arnold form,符號定義為Jμ。將 μ K 放入Jordan-Arnold form,則(20)可以改寫為 A& = JμA+gμ(A) (22) 其中 J J0 = (23) 表示為另外一個非線性向量函數。因此,(22)即為振幅方程式 的正規化形式。接下來,本計畫將依據此雙對流理論推導直流 電漿火炬之數學動態模型。 (二) 直流電漿火炬之數學模型 直流電漿火炬之建立主要為了探討弧根之動態行為,建立 能解釋顫動行為之數學動態模型。直流電漿火炬之動態行為是 由 熱 守 恆(conservation of heat) 、 金 屬 守 恆 (conservation of metal) 、 動 量 守 恆 (conservation of momentum) 、 質 量 守 恆 (conservation of mass)及 Maxwell’s equation 所決定且依據電漿
火炬之物裡特性找出電漿系統之boundary conditions。以下將
依據P. H. Coullet 和 E. A. Spiegel 與 A. K. Das 之研究理論為基 礎,建立直流電漿火炬之非線性方程式。建立電漿火炬,我們
有以下六個假設: 1. 弧根可近似為對稱的圓柱體 2. (u, v, w)表示在r、θ和 z 方向之速度 3. T(r,θ,z,t)和S(r,θ,z,t)分別表示產生顫動現象時的溫度和 金屬揮發濃度及分別存在有靜態組合T0(r,θ,z)和S0(r,θ,z) 4. z 方向且高度為 d 的區域內存在溫度梯度ΔT d和金屬濃度 梯度ΔS d 5. 在 r 方向存在均勻溫度 6. 對於圓柱形的電弧圓柱體的半徑 R 而言,系統操作在固定 電流的電源供應且電流密度J0趨近於常數 描述電漿火炬顫動現象的動態方程式分別可由下述之方程式 共同決定: (1) 熱守恆 T T v d T w t T − Δ + ⋅∇ =κ∇2 ∂ ∂ r r (24) 其中
T:fluctuating temperature component
s k ρ = κ :熱擴散率 z w v r u vr= ˆ+ θˆ+ ˆ:速度 k:熱傳導率 ρ:密度 s:比熱 (2) 金屬守恆 S S v d S w t S S 2 ∇ κ = ∇ ⋅ + Δ − ∂ ∂ r r (25)
其中 S:金屬濃度 κS:材料的傳導率 (3) 動量守恆 v v p v v g T g S J B t vr r r r r r r× r ρ + β − α + ∇ + ∇ ρ − = ∇ ⋅ + ∂ ∂ 0 2 0 1 1 (26) 其中 壓力(p)造成的垂直應力 黏性(v)造成的切線方向應力 流體和材料加入的擴張所造成的引力 電流密度(J)伴隨著磁場(B)的相互影響所造成的 Lorenz force gr:重力加速度 (4) 質量守恆 ∇ vrr ⋅ =0 (27) (5) Maxwell’s equation 1 ( ) 0 B Jr ∇r × r μ = , t B E ∂ ∂ − = × ∇ r , ∇ Br⋅ r=0, ε ρ = ⋅ ∇ C Er (28) 其中 σC:導電率 μ0:介電係數 (6) 電流密度 J C(E v B) r r r r × + σ = (29) (7) 狀態方程式
Δρ=ρ0(−αT +βS) (30) 其中 α和β則定義於(30) E:電場 k:熱傳導率 ρC:電荷密度 考慮 B 為圓柱型對稱。因此(28)可以寫成 v B B B v t B B r r r r r r r r ) ( 2 + ⋅∇ ∇ η = ∇ ⋅ + ∂ ∂ 若考慮接近弧根處為一微小圓柱,則可近似為Br =Bθ(r)θˆ和 z J Jv= 0ˆ。方程式則可以改寫為 B u J v B t B B 2 0 0 ) , ( −μ +η ∇ φ = ∂ ∂ (31) 其中 φ(B,v) =(B⋅∇)v+u(B r), C B σ μ = η 0 1 , θ = B B r:圓柱的半徑 為了在簡化上述之動態方程式,取其旋度移除壓力項。引進 stream function ψ使得 z dt dr u ∂ ψ ∂ = = , r dt dz w ∂ ψ ∂ − = = ,Γ(ψ,ϕ)=−Vr⋅∇rϕ ψ ∇ = ∂ ∂ − ∂ ∂ = η 2 r w z u , 2 0 I d J = ,B0 =μ0J0R 2 接 著 , 利 用 表 一 dimensionless quantities 的形式和表二的 nondimensional numbers 帶入上式,可以將方程式簡化。
表一、Form of dimensionless quantities Dimensionless quantities Form
Temperature T T T′= Δ Concentration gradient S S S′= Δ Spatial coordinates d x x′= , d y y′= , d z z′= r d r′= ⋅ , θ′ d= ⋅θ, z′=d⋅z Velocity components u ud κ = ′ , d v v′= κ , d w w′= κ Time t′= d2tκ Magnetic field B0 B B′= 表二、Nondimensional numbers Rayleigh number Rl Rl g kvTd 3 Δ α =
Absolute Raylleigh number Rs Rs g kvSd
3 Δ α = Prandtl Number σ k v = σ
Magnetic Prandtle number ξ ξ= ηkB
Lewis number τ τ= κκS Chandrasekhar number Q Bdv Q= μρ0η 2 2 0 其中定義r=dr′、θ d= θ′、z=dz′。在nondimensionalization 之 後,governing equation 的集合可以改寫如下: 由(26)知: v v p v v g T g S J B t v r r r r r r× r ρ + β − α + ∇ + ∇ ρ − = ∇ ⋅ + ∂ ∂ 0 2 0 1 1
(A1) t v ∂ ∂ ⇒ ∵ =η ∂ ∂ − ∂ ∂ = r w z u v curl ⇒ ⎟=η ⎠ ⎞ ⎜ ⎝ ⎛ ′ ∂ ′ ∂ − ′ ∂ ′ ∂ ⋅ κ r w z u d2 ⇒ η= κ2 η′ d ∴ t d t v ′ ∂ η′ ∂ κ = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ 4 2 curl (A2) vr ∇⋅ vr ⇒ 取旋度,則 curl( vr⋅∇vr)=vr⋅∇η ⇒ 4 ( , ) 2 4 2 η′ ψ Γ κ − = η′ ∇ ⋅ ′ κ = ∇ ⋅ d v d v vr r r (A3) ν⋅∇2vr ⇒ 取旋度,則 ⇒ ∇ = κ ν⋅∇ η′= κ ⋅κσ⋅∇ η′= κ σ⋅∇2η′ 4 2 2 4 2 4 3 2 ) (ν curl d d d vr (A4) Jr×Br ρ0 1 (A5) grαT =ΔTgαT′ ⇒ Tg d T d T Tg T Tg r ⋅∂r ′ κ ν κν α Δ ⋅ κ − = ′ −∂ α Δ = ′ α Δ ′ 3 4 2 ) ( ) ( curl R T d lσ⋅∂r ′ κ − = 24 ′ (A6) gβr S,同(A5)可得 ⇒ Sg d S d S Sg S Sg r S S r ∂ ′ κ κ ⋅ κ ν ν κ β Δ ⋅ κ = ′ ∂ β Δ = ′ β Δ ′ 3 4 2 ) ( curl R T d sστ∂r ′ κ = 42 ′ 由(A1)-(A6)可知 R T d d d t d lσ⋅∂r ′ κ − η′ ∇ ⋅ σ κ + η′ ψ Γ κ = ′ ∂ η′ ∂ κ ′ 4 2 2 4 2 4 2 4 2 ) , ( Q B Rd T R d s r′ σξ ∂z′ κ − ′ ∂ στ κ + 42 2 24
⇒ Q B R S R T R t′ =Γ ψ η′ +σ∇ η′− lσ∂r ′+ Sστ∂r ′− σξ ∂z ′ ∂ η′ ∂ ′ ′ ′ 2 ) , ( 2 (32) 由(24)知: v T T d T w t T − Δ + ⋅∇ =κ∇2 ∂ ∂ r r (B1) t T k d T t T ′ ∂ ′ ∂ ⋅ Δ = ∂ ∂ 2 (B2) 2 ⎟= κΔ2 (−∂ ψ) ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ψ ∂ − Δ κ = Δ ⋅ ′ ⋅ κ = Δ ⋅ r d T r d T d T w d d T w (B3) 2 2 ( ,T ) d T T v d T T vr⋅∇ = κΔ r′⋅∇ ′=−κΔ Γ ψ ′ ∵vr=urˆ+vθˆ +wzˆ ⇒ v d z w v r u d vr = κ( ′ˆ+ ′θˆ + ′ˆ)= κ r′ ∵ z T y T x T T ∂ ∂ + ∂ ∂ + ∂ ∂ = ∇ ⇒ T d T z T y T x T d T T ⎟⎟= Δ ∇ ′ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ′ ∂ ′ ∂ + ′ ∂ ′ ∂ + ′ ∂ ′ ∂ Δ = ∇ ∴ 2 2 ( ,T ) d T T v d T T vr⋅∇ = κΔ r′⋅∇ ′=−κΔ Γ ψ ′ (B4) T d T T = κΔ ⋅∇ ′ ∇ κ 2 2 2 ∵ 2 22 22 22 z T y T x T T ∂ ∂ + ∂ ∂ + ∂ ∂ = ∇ ⇒ T d T z T y T x T d T T ⎟⎟= Δ ∇ ′ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ′ ∂ ′ ∂ + ′ ∂ ′ ∂ + ′ ∂ ′ ∂ Δ = ∇ 2 2 2 2 2 2 2 2 2 2 因此,從(B1)-(B4)可知 T d T d T T d T t T d T r ⋅∇ ′ Δ κ + ψ ∂ ⋅ Δ κ − ′ ψ Γ ⋅ Δ κ = ′ ∂ ′ ∂ ⋅ Δ κ 2 2 2 2 2 ( , ) ⇒ T T t T rψ+∇ ′ ∂ − ′ ψ Γ = ′ ∂ ′ ∂ ( , ) 2 (33) 由(25)知,同理可得
S S t S rψ+τ∇ ′ ∂ − ′ ψ Γ = ′ ∂ ′ ∂ ( , ) 2 (34) 其中κS =τ⋅κ。 由(31)知: B v J u B t B B 2 0 0 ) , ( −μ +η ∇ φ = ∂ ∂ (C1) t B d B t B ′ ∂ ′ ∂ κ = ∂ ∂ 2 0 (C2) ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ′ κ + ′ ∇ ⋅ ′ κ = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ∇ ⋅ = φ r B d B v B d B r B u v B v B, ) ( ) 02 ( ) 0 ( (C3) u dR B u J = κ ′ μ 0 0 0 2 ∵ 2 0 0 0 R J B =μ ⇒ R B J0 0 0 2 = μ (C4) B d kB B B ∇ ′ ξ = ∇ η 2 2 0 2 從(C1)-(C4)可知: B d kB u dR B r B d B v B d B t B d B − κ ′+ ξ∇ ′ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ′ κ + ′ ∇ ⋅′ κ = ∂ ′ ∂ κ 2 2 0 0 0 2 0 2 0 ( ) 2 假設r′=d⋅r且ξ=κ ηB ,則 B dR B v t B zψ+ξ∇ ′ ∂ − ′ ′ φ = ′ ∂ ′ ∂ ′ −1 2 2 ) , ( (35) 接下來,我們將利用正規化形式推導直流電漿火炬之振幅方程 式。首先,將(32)-(35)改寫為下列形式 ∂tLY =MλY+N(Y) (36) 其中 L 為非奇異非線性操作子,M 表示為相依操作參數之線 性操作子 N 則表示完全非線性操作子。因此,我們可以得到 下列之關係式
⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ψ = B S T Y , ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛∇ = 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 2 L , ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ′ ′ φ ′ ψ Γ ′ ψ Γ η′ ψ Γ = ) , ( ) , ( ) , ( ) , ( ) ( B v S T Y N ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ∇ ξ ∂ − ∇ τ ∂ − ∇ ∂ − ∂ σξ − ∂ στ ∂ σ − ∇ σ = − − λ 2 1 2 2 1 4 0 0 2 0 0 0 0 2 z r r z r s r l dR Q R R R M (37) 其中動態的控制參數為λ=(Rl,Rs,Q,σ,τ,ξ)。取(36)之線性部 分,則可以得到 Y M LY t = λ ∂ (38) 依據雙對流之正規化形式之理論,(38)解的形式假設如下: st mn mn e Y Y = *Λ (39) 其中Ymn為4 個常數組成的向量。接著,定義運算符號“*”: ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ bd ac d c b a * 且 ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ π π π π = Λ ) . . cos( ) . . sin( ) . . sin( ) . . cos( ) . . sin( ) . . cos( ) . . sin( ) . . sin( z n r a m z n r a m z n r a m z n r a m mn 其中 m=0,1,2,K 和n=0,1,2,K (40) 接著,將(40)帶入(39),則 ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ⋅ π ⋅ ⋅ ⋅ ′ ⋅ π ⋅ ⋅ ⋅ ′ ⋅ π ⋅ ⋅ ⋅ ′ ⋅ π ⋅ ⋅ ⋅ ψ′ = ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ′ ′ ′ ψ′ st mn st mn st mn st mn e z n r a m B e z n r a m S e z n r a m T e z n r a m B S T ) cos( ) sin( ) sin( ) cos( ) sin( ) cos( ) sin( ) sin( (41) 將上式帶入(38)的左式,則
⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ⋅ π ⋅ ⋅ ⋅ ′ ⋅ π ⋅ ⋅ ⋅ ′ ⋅ π ⋅ ⋅ ⋅ ′ ⋅ π ⋅ ⋅ ⋅ ψ′ ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛∇ ∂ = ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ′ ′ ′ ψ′ ∂ st mn st mn st mn st mn t t e z n r a m B e z n r a m S e z n r a m T e z n r a m B S T L ) cos( ) sin( ) sin( ) cos( ) sin( ) cos( ) sin( ) sin( 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 2 ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ⋅ π ⋅ ⋅ ⋅ ′ ⋅ π ⋅ ⋅ ⋅ ′ ⋅ π ⋅ ⋅ ⋅ ′ ⋅ π ⋅ ⋅ ⋅ ∇ ψ′ ∂ = st mn st mn st mn st mn t e z n r a m B e z n r a m S e z n r a m T e z n r a m ) cos( ) sin( ) sin( ) cos( ) sin( ) cos( ) cos( ) sin( 2 ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ⋅ π ⋅ ⋅ ⋅ ′ ⋅ π ⋅ ⋅ ⋅ ′ ⋅ π ⋅ ⋅ ⋅ ′ ⋅ π ⋅ ⋅ ⋅ ψ′ π − − ∂ = st mn st mn st mn st mn t e z n r a m B e z n r a m S e z n r a m T e z n r a m n a m ) cos( ) sin( ) sin( ) cos( ) sin( ) cos( ) cos( ) sin( ) ( 2 2 2 2 ⎪ ⎪ ⎭ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ′ ′ ′ ψ′ ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ⋅ π ⋅ ⋅ ⋅ ⋅ π ⋅ ⋅ ⋅ ⋅ π ⋅ ⋅ ⋅ ⋅ π ⋅ ⋅ ⋅ ⋅ ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛− − π ∂ = st mn mn mn mn t e B S T z n r a m z n r a m z n r a m z n r a m n a m * ) cos( ) sin( ) sin( ) cos( ) sin( ) cos( ) cos( ) sin( 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 2 2 2 2 =∂tLmnY 將(41)帶入(38)的右式 MλY ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ⋅ π ⋅ ⋅ ⋅ ′ ⋅ π ⋅ ⋅ ⋅ ′ ⋅ π ⋅ ⋅ ⋅ ′ ⋅ π ⋅ ⋅ ⋅ ψ′ ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ∇ ξ ∂ − ∇ τ ∂ − ∇ ∂ − ∂ σξ − ∂ στ ∂ σ − ∇ σ = − − st mn st mn st mn st mn z r r z r s r l e z n r a m B e z n r a m S e z n r a m T e z n r a m dR Q R R R ) cos( ) sin( ) sin( ) cos( ) sin( ) cos( ) sin( ) sin( 0 0 2 0 0 0 0 2 2 1 2 2 1 4 ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ π + ξ − π − π + τ − − π + − − σξ π στ − σ π + σ = − − ) ( 0 0 2 0 ) ( 0 0 0 ) ( 2 ) ( 2 2 2 2 1 2 2 2 2 2 2 2 2 1 2 2 2 2 2 n a m n dR n a m ma n a m ma Q R n maR maR n a m l s
st mn mn mn mn e B S T z n r a m z n r a m z n r a m z n r a m ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ′ ′ ′ ψ′ ⋅ ⎪ ⎪ ⎭ ⎪ ⎪ ⎬ ⎫ ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ⋅ π ⋅ ⋅ ⋅ ⋅ π ⋅ ⋅ ⋅ ⋅ π ⋅ ⋅ ⋅ ⋅ π ⋅ ⋅ ⋅ ) cos( ) sin( ) sin( ) cos( ) sin( ) cos( ) sin( ) sin( * mn st mn mn e Y M * ) ( Α = 其中 ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ξ − π − τ − − − − πξσ στ − σ σ = − − 2 1 2 2 1 4 0 0 2 0 0 0 0 2 mn mn mn s l mn mn q dR n q ma q ma QR n R ma R ma q M (42) ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛− = 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 2 mn mn q L (43) 2 2 2 2 2 = + π n a m qmn (44) 對應給定的特徵值,我們可以得到特徵方程式 det(Mmn −Lmns)=0 (45) 將(42)和(43)帶入(45),則 ] 0 0 0 2 0 0 0 0 2 det[ 2 1 2 2 1 2 4 = ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ − ξ − π − − τ − − − − − πξσ στ − σ + σ − − s q dR n s q ma s q ma QR n R ma R ma sq q mn mn mn s l mn mn ⇒qmn2 s4 +(1+σ+τ+ξ)qmn4 s3 +[(σ+τ+ξ+στ+σξ+τξ)qmn6 −m2a2σRl 2 2 4 2 2 2] 2 {( ) 8 mn s n dQR s q R a m στ − π ξσ + στ+σξ+τσξ+τξ + − [ (m a Rl)( ) m a Rs(1 ) 4n QdR (1 )]qmn}s 2 2 2 2 2 2 2 2 σ ξ+τ + στ +ξ − π ξσ +τ − + − +στξ 10 + 2 2σξτ(− + ) 4 −4 2π2ξστ −2 4 =0 mn mn s l mn m a R R q n dQR q q 因此,我們可以得到特徵方程式
2 1 0 0 2 3 3 4 +Π s +Π s +Π s+Π = s (46) 其中 6 2 2 2 2 2 2 0 =[qmn +m a (Rs −Rl)−4n π dQR ]σξτqmn Π − Π = στ+σξ+τξ+τξσ 6 + τ +ξ − ξ+τ 2 2σ 1 ( )qmn [ Rs(1 ) Rl( )]m a +τ (1+ξ)−4 2π2ξσ −2(1+τ) QdR n Rs 4 2 =(σ+τ+ξ+στ+σξ+τξ)qmn Π +[(τ − ) 2 2 −4 2π2ξ −2]σ −2 mn l s R m a n dQR q R 2 3 =(1+σ+τ+ξ)qmn Π 假設s= iω且ω為實數,則代入(46)可以得到 0 0 1 2 2 3 3 4 − ω Π −ω Π + ωΠ +Π = ω i i (47) 因此,從(47)可以觀察到可能的解 (i) Π0 =0和ω=0 (ii) ω2 =Π1/Π3和 2 0 3 0 3 2 1 2 1 −Π Π Π +Π Π = Π ,其中Π1≥0 從雙對流理論可以知道滿足 polycritical surface 的條件為 Π0 =Π1 =Π2 =0 (48) 將條件(48)代入(46)則可以得到 critical 多項式: 2 1 0 2 3 ) (s s c s cs c PC ≡ + + + (49) 其中 3 0 0 Π Π = c , 2 3 0 3 1 1 Π Π − Π Π = c , 3 3 0 2 3 0 3 2 2 Π Π + Π Π − Π Π = c (50) ploycritical surface 的條件則為c0 =c1 =c2 =0。因此,若n= m=1 時,可以得到 ) 1 )( 1 ( ) ( 2 6 − ξ − τ σ ξ + τ + σ = a q Rlo , ) )( 1 ( ) 1 ( 2 6 τ − ξ − τ σ ξ + σ + τ = a q Rso
) )( 1 ( ) 1 ( 2 6 0 σ ξ− ξ−τ ξ τ + σ + = c q Q (51) 在 critical 表面之任意點,正規化模式在s=0表面上滿足 0 *Λ = φ mn C M 其中φ表示四個常數組成之向量。由於在 critical
表面時,det(MC)=0。因此可以得到null space 之基底
T R q d q a q a ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ξ π − τ − − = φ 1 2 2 22 (52) 其餘的二個向量則可以由以下式子求得 MCψ=LCφ 和 MCχ=LCψ (53) 最後可以得到線性的動態方程式(38)。因此,由雙對流理論可
知系統可以分成二部分:一是generalized critical space,另一
則是stable modes。我們可以將 Y 寫成下面之方程式
Y =[A(t)φ+B(t)ψ+C(t)χ]*Λmn +S~(r,z,t) (54)
在上式中,S~表示 stable modes;定義符號Φ=[φ ψ χ]為 null
space 的基底且A=[A(t) B(t) C(t)]。從(52)和(53)可以得到
∑
= Φ Ω = Φ 3 1 i j C ji i C L M (55) 其中 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = Ω 0 0 0 1 0 0 0 1 0 (56) 因此,我們可以得到 A& =ΩA (57) 由於(57)是描繪系統在 critical 表面上之動態行為,我們在接下 來的部分將探討系統在 critical 表面附近時的動態行為特性。 定義符號:λ表示為接近critical 表面的參數值;Φλ =[φλ ψλ χλ]為 critical 表 面 附 近 的 基 底 向 量 空 間 ; 振 幅 方 程 式 則 為 A K A& = λ ;Y =[A(t)φλ +B(t)ψλ +C(t)χλ]*Λ11+S~λ。同理,依據雙 對流理論,我們可以得到 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = λ 2 1 0 1 0 0 0 1 0 c c c K (58) 因此,靠近 polycritical 的線性振幅方程式A& =KλA可以得到以 下之數學模型: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ C B A c c c C B A 2 1 0 1 0 0 0 1 0 & & & (59) 將(59)整理後可得
&A&&+c2A&&+c1A& +c0A=0 (60)
另外,我們接下來要考慮系統之非線性部分,將(60)擴充為非 線性振幅方程式。考慮非線性則(60)可以改寫為
&A&&+c2A&&+c1A& +c0A=g(A) (61)
其中g(A)表示非線性項。最後,依據(32)-(35)可得到 g(−A)=−g(A) (62) 從(62)可知,系統存在有最低階數之非線性項 ( 3) A O 。另外, ) (A g 可依據perturbation 理論表示為系統的狀態(A, B, C)之線 性組合,即 g(A)=t1A3+t2A2B+t3AB2 +t4B3 +t5A2C+t6ABC+t7B2C 3 10 2 9 2 8AC t BC t C t + + + (63) 其中ti's為不同的常數係數。另外, 3 1A t 為(63)的 dominant term,則我們可以將三階非線性振幅方程式近似為
3 1 0 1 2A c A c A t A c
A&&+ &&+ & + =
& (64) 對於直流電漿火炬之行為特性可知,t1等於1 和-1,則(64)為 3 0 1 2A cA c A A c
A&&+ &&+ &+ =±
& (65) 為了簡化分析,引進新的時間比率s=εt和振幅A=ε3/2F且選擇 2 c = ε ,則(65)可以改寫為 3 0 1 2F F F F
F&&&+Ω &&+Ω & +Ω =± (66)
其中 2 2 0 0 c c = Ω , 3 2 1 1 c c = Ω ,Ω2 =1 且定義新的符號以簡化非線性振幅方程式的系統參數 δ qˆ = 2(1+τ+σ+ξ) δˆ = 2( 6 − 2 2 + 2 2 −4 π2 −2 2 )στξ 1 q q a m Rl a m Rs d R n Q a m Rl a m Rs d R n Q 2 2 2 2 2 2 2 2 ( ) (1 ) 4 (1 ) ˆ =− σ τ+ξ + στ +ξ − π σξ +τ δ − ( ) 6 q στξ + τξ + σξ + στ + δˆ =− 2( 6 − 2 + 2 −4 π2 −2 2 )στξ 3 q q a Rl a Rs d R n Q a q m Rl a q m Rs d R q n Q 2 2 2 2 2 2 2 2 2 2 4 4 ˆ =− σ − + στ − − π − σξ − δ ( ) 4 q τξ + σξ + στ + ξ + τ + σ + a m Rl a m Rs d R n Q 2 2 2 2 2 2 2 5 ( ) (1 ) 4 (1 ) ˆ =− σ τ+ξ + στ +ξ − π σξ +τ δ − ( ) 6 q στξ + τξ + σξ + στ + δˆ = 2( 6 − 2 2 + 2 2 −4 π2 −2 2 )στξ 6 q q a m Rl a m Rs d R n Q 則得到以下的系統參數 δ δ = ˆ ˆ 1 0 c 2 3 2 1 ˆ ˆ ˆ ˆ δ δ − δ δ = c
36 2 5 4 2 ˆ ˆ ˆ ˆ ˆ ˆ δ δ + δ δ − δ δ = c 最後,我們可以推導出系統參數(Ω0、Ω1和Ω2) 2 6 5 2 4 5 1 0 ) ˆ ˆ ˆ ˆ ˆ ( ˆ ˆ δ + δ ⋅ δ − δ ⋅ δ δ ⋅ δ = Ω 3 6 5 2 4 7 3 8 2 1 ) ˆ ˆ ˆ ˆ ˆ ( ˆ ˆ ˆ ˆ δ + δ ⋅ δ − δ ⋅ δ δ ⋅⋅ δ − δ ⋅ δ = Ω Ω2 =1 因此,最後我們可以利用非線性理論與分叉理論分析三階非線 性振幅方程式(66)以及探討系統的動態行為。 二、模擬及分析電漿火炬非線性之動態特性 此部分之重點為分析電漿火炬之分叉特性,探討其顫動現 象的發生原因。從學者A. K. Das 之研究發現電漿系統之顫動現 象為一混沌行為,並非以往認知的隨機行為。然而,A. K. Das 的研究僅考慮單一系統參數發生變化時之系統動態,文獻討論 此系統參數發生變化時的混沌現象且探討系統從穩定到發生混 沌行為的參數範圍。經由分叉理論分析電漿系統之分叉特性發 現影響電漿的因素可能不僅A. K. Das 考慮之單一參數,其他參 數也可能影響系統使系統進入混沌現象甚至狀態發散。因此, 本計畫之模擬分析將以前述建立之電漿火炬動態模型為基礎, 探討電漿系統的所有動態範圍,分析系統的所有參數之範圍。 另外,電漿系統之系統參數可能同時發生變化,系統可能會進 入固定振盪週期之參數範圍。在接下來的部分,我們將分析系 統參數之間的關聯性,探討可能發生顫動現象之因素。透過非
線性理論和分叉理論探討分叉參數變化之範圍,找出混沌現象 的範圍。另外,我們也探討電漿火炬之其他可能發生的動態特 性,找出系統可能發生的動態行為。 在 A. K. Das 的研究中,學者僅將(66)之Ω0設定為系統參 數,其他則設定為常數,即Ω1 =50及Ω2 =1。在模擬分析時,本 計畫則是將Ω0、Ω1和Ω2設定為系統參數,模擬分析Ω0、Ω1和Ω2 發生變化時的關聯性以及探討系統參數影響顫動現象之成因。 本計畫採用數值分析軟體 AUTO 模擬系統之分叉特性且利用 Matlab 模擬系統的時間響應以及相位圖。我們分 3 種可能性探 討系統之動態行為:(i)僅Ω0改變時之動態特性;(ii)考慮Ω0或Ω1 改變時之動態特性;(iii)考慮Ω0或Ω2發生改變時之動態特性。 以下將深入探討這三種情況之分叉特性。 Case 1: 僅改變Ω0,Ω1和Ω2固定 在此例子中,固定Ω1=50和Ω2 =1,將Ω0設定為系統參 數。因此,設x1 =F、x2 =F& 和x3 =F&&,(66)可以改寫成狀態空 間形式 x&1 =x2 x&2 =x3 (67) 3 1 3 2 1 3 x 50x x x x& =−μ − − − 其中Ω0 =μ為分叉參數。在本計畫中之模擬圖,實線代表穩定 的平衡點軌跡或穩定的limit cycle,虛線則表示不穩定的平衡 點,模擬圖符號表示為 HB:Hopf bifurcation
SB:Stationary bifurcation PD:Period doubling 圖 1 為直流電漿火炬之分叉圖,表三列出系統之分叉點。 從圖1 可以知道電漿火炬在μ=0會發生pitchfork bifurcation 且 在0<μ<50時系統是漸進穩定的。當μ>50,則系統是不穩定 的;當μ持續減小且通過原點時,系統由一個平衡點分叉為三 個平衡點。另外,在μ=−25以及μ=50出現 Hopf bifurcation, 即表示系統之Jacobian matrix 的特徵值會落在虛軸上,系統會 出現週期解並產生振盪之動態行為。接著,當μ從μ>50持續 減小且穿過μ =50時,系統之平衡點從 unstable focus 變成
stable focus,且產生一個 limit cycle。當μ減少並跨過μ=0時, 系統由一個穩定的平衡點軌跡分叉為二個穩定的平衡點軌跡 和一個不穩定的平衡點軌跡,即發生 supercritical pitchfork bifurcation。因此,系統的穩定性將取決於系統狀態之初始值。 當μ<0且初始值在原點附近時,系統會被不穩定的平衡點吸 引而造成不穩定。當μ減少至μ =−25,系統會發生二個 Hopf bifurcation(即 HB2 和 HB3);這二個 HB 會分叉為一條穩定的 limit cycle 和一條不穩定的 limit cycle。當μ減少至μ =−108.823
和μ=−108.777時,穩定的limit cycle 軌跡則變成不穩定的 limit cycle 軌跡,此分叉現象表示系統會發生週期變化;因此,從 模 擬 結 果 可 知 在μ=−108.823 和μ=−108.777 會 發 生 period doubling。從圖 1 可以知道,選擇 HB2 到 PD1(或 HB3 到 PD2)
之limit cycle 軌跡附近的初始值與分叉參數,系統之動態為一
則系統會發生二倍週期之振盪。當μ持續減少時,系統將發生 週期性變化且進入混沌現象之區域。系統之行為開始出現週期 性變化,則無法預估其動態行為;如此一來,我們就無法預期 系統可能會發生之行為特性,導致無法應用系統分析理論與控 制設計改善系統之穩定與使用性能;甚至μ仍持續變化減小, 系統之狀態可能會發散而使系統發生不可預期的危險。從圖1 可以了解分叉參數與系統狀態行為之間的關係;接下來,我們 透過時間響應與相位圖探討直流電漿火炬隨時間之動態行為。 圖1. 直流電漿火炬之分叉圖 (μ v.s. x1)
表三、Location of bifurcation points
) , ,
(x1 x2 x3 μ
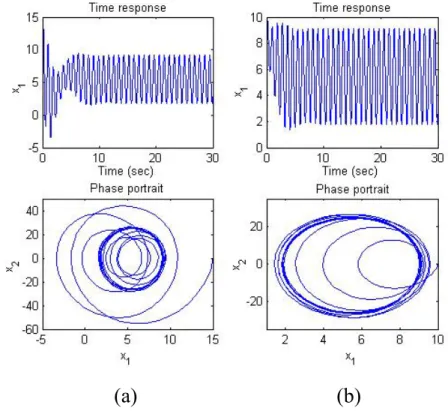
HB1 (0 ,0 ,0) 50 HB2 (5 ,0 ,0) -25 HB3 (−5 ,0 ,0) -25 PD1 (13.15 ,43.9 ,330.8) -108.823 PD2 (0.25 ,49.52 ,343.67) -108.777 我們在分叉圖上選取分叉點附近的分叉參數與初始值,從 時間響應觀察系統之時域動態以及其相位圖。圖 2(a)為選取 3 = μ 且初始值設為(x10,x20,x30)=(1,0,0);圖 2(b)為選擇μ=3和 初始值設為(x10,x20,x30)=(−1,0,0)。圖 3(a)(b)則是選取μ=−5且 初始值分別選取(x10,x20,x30)=(4,0,0)和(x10,x20,x30)=(−4,0,0);圖 4(a)(b)則是選取μ=−5且初始值分別選取(x10,x20,x30)=(2,0,0)和 ) 0 , 0 , 2 ( ) , , (x10 x20 x30 = − 。從圖2 和圖 3 之時間響應圖與相位圖可 以發現當0<μ<50及初始值選取在穩定平衡點附近時,系統狀 態被穩定平衡點吸引而使系統狀態趨近於0。另外,圖 3 選取 0 25<μ< − 及初始值介於穩定平衡點軌跡與不穩定的 limit cycle 之間的值,模擬圖顯示此區域之系統狀態被穩定的平衡 點吸引。同理,圖4 則在−25<μ<0的範圍選取介於二條穩定 的平衡點軌跡之間的初始值,從時間響應圖與相位圖可以知道 這個區域之初始值會被穩定的平衡點吸引,最後系統狀態趨近 於穩定。另外,我們將分析系統之動態分叉,即當μ持續變化 至發生Hopf bifurcation 時之行為特性,探討系統之振盪行為。 接下來,我們分析分叉圖搭配時間響應圖和相位圖,解釋高溫 直流電漿火炬之振盪週期以及週期變化。
(a) (b)
圖2. 時間響應(x1v.s. t)和相位圖(x1v.s.x2)
(a) (b)
(a) (b)
圖4. 時間響應(x1v.s. t)和相位圖(x1v.s.x2)
(a) (b)
(a) (b)
圖 6. 時間響應(x1v.s. t)和相位圖(x1v.s.x2)
(a) (b)
(a) (b)
圖 8. 時間響應(x1v.s. t)和相位圖(x1v.s.x2)
(a) (b)
(a) (b)
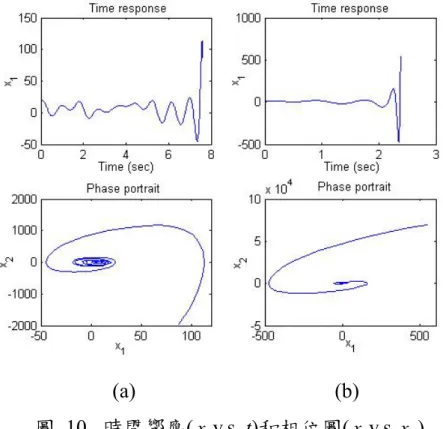
圖 10. 時間響應(x1v.s. t)和相位圖(x1v.s.x2)
(a) (b)
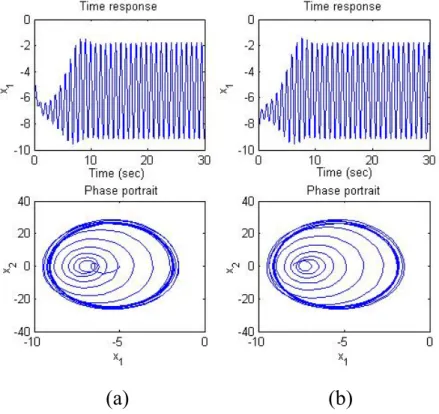
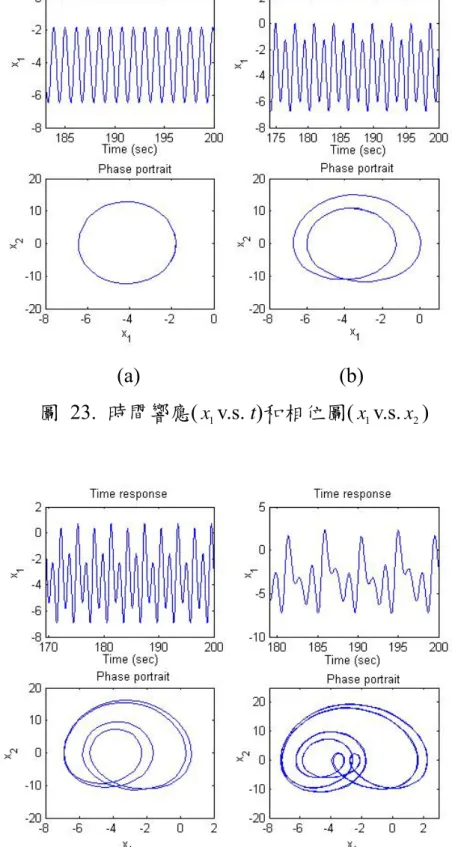
(a) (b) 圖 12. 時間響應(x1v.s. t)和相位圖(x1v.s.x2) 圖 5(a)(b)選取μ=60且初始值(x10,x20,x30)分別設為(5,0,0) 和(−5,0,0),搭配圖 1 之分叉圖可以發現在此區域內之平衡點 為不穩定的。圖 6(a)(b)選取初始值(x10,x20,x30)=(10,0,0)且μ分 別為5 和-3;圖 6 之時間響應圖和相位圖表示在此區域內之系 統狀態被穩定的平衡點吸引,系統將趨近於穩定。圖7(a)(b)~ 圖 9(a)(b)則選取μ=−50及初始值(x10,x20,x30)分別選取(15,0,0) 和(10,0,0)、(7,0,0)和(2,0,0)及(−5,0,0)和(−8,0,0)。從圖 7~圖 9 之時間響應與相位圖的模擬結果說明了這些區域會發生 Hopf bifurcation,系統會產生振盪之週期解,其模擬之行為特性符 合圖1 分叉圖之分析結果。另外,從圖 1 可以知道當μ<−108.8 時,系統的振盪週期會發生變化甚至進入混沌行為之區域。我 們將逐步探討從 Hopf bifurcation 延伸軌跡的動態特性,解釋
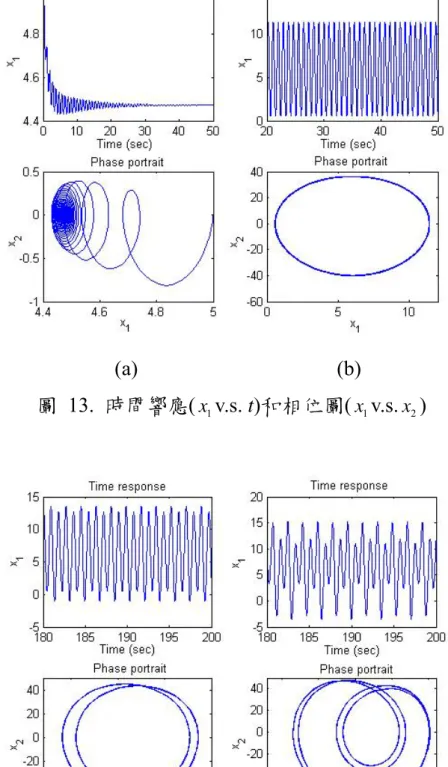
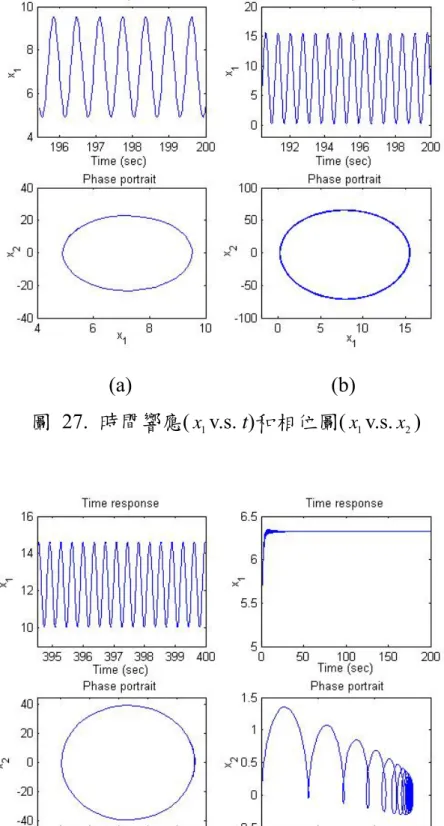
系統從穩定狀態開始產生固定週期的振盪行為之參數變化,最 後進入非固定週期之混沌行為到系統狀態發散。我們在圖 7~ 圖 9 之時間響應圖與相位圖說明系統之振盪週期變化以及混 沌現象。圖10(a)(b)~圖 12(a)(b)則選取相同的μ=−50和不同的 初始值(x10,x20,x30)=(20,0,0)和(17,0,0)、(13,0,0)和(5,0,0)以及 (1,0,0)和(-1,0,0)。圖 10~圖 12 表示這些區域的分叉參數和初始 值會使系統發散,系統會因初始值的不同而造成動態行為由振 盪行為轉變成發散。 圖 13(a)(b)~圖 16(a)(b)使用相同的初始值(x10,x20,x30)= ) 0 , 0 , 5 ( 且分別選取不同的μ值,即μ=-20、-80、-115、-120、 -122.15、-130、-144 和-146。從圖 13~圖 16 可以看出,μ=−20 為穩定的;當μ=−80時,則發生一倍週期的振盪行為;當 115 − = μ 時,則發生二倍週期的振盪行為;而當μ=−120和 15 . 122 − 時,則分別發生四倍週期和八倍週期的振盪行為;當 130 − = μ 和−144時,系統之振盪行為產生不規則之週期變化, 即表示系統之狀態發生混沌現象;最後,當μ=−146時,系統 之動態行為是不穩定的。因此,透過模擬圖之分析結果發現, 系統會隨著μ值變化而使系統發生週期變化甚至是混沌行 為。在此 case 1 中,我們僅考慮Ω0發生變化時之系統可能發 生的動態行為。此分析結果包含學者A. K. Das 探討之參數範 圍;另外,case 1 也探討比文獻更廣的參數變化範圍,說明系 統狀態發生不穩定的參數區域,此結果將可以避免系統發生不 可預期的危險。
(a) (b)
圖 13. 時間響應(x1v.s. t)和相位圖(x1v.s.x2)
(a) (b)
(a) (b)
圖 15. 時間響應(x1v.s. t)和相位圖(x1v.s.x2)
(a) (b)