行政院國家科學委員會專題研究計畫 成果報告
具有泛用型、欠致動及不確定性的非線性動態系統之混合 模糊滑動模式控制
研究成果報告(精簡版)
計 畫 類 別 : 個別型
計 畫 編 號 : NSC 100-2221-E-011-029-
執 行 期 間 : 100 年 08 月 01 日至 101 年 07 月 31 日 執 行 單 位 : 國立臺灣科技大學電機工程系
計 畫 主 持 人 : 黃志良
計畫參與人員: 碩士班研究生-兼任助理人員:張鈞筌 博士後研究:吳修明
公 開 資 訊 : 本計畫可公開查詢
中 華 民 國 101 年 10 月 13 日
中 文 摘 要 : 首先,將差速自走車機器人的運動、動態方程式及左右輪之 馬達動態結合成為一受控系統,並以左右輪的驅動馬達之輸 入電壓為受控系統之控制輸入,而其(間接)輸出為差速自走 車機器人的 2D 位置與方位。基於欠致動的特性,以直接的參 考輸入(也就是兩個想要的馬達電流)設計第一層滑動曲面。
此外為了使 2D 位置與其方位同時被兩個馬達電流所控制,以 馬達電流追蹤誤差之線性動態設計第二層滑動曲面。因此在 完全或部分已知摩擦力以及不確定性下,設計階層滑動模式 欠致動控制,在適當條件下使得兩個馬達電流分別漸近地追 蹤兩個想要的馬達電流,接著自走車之 2D 位置與其方位也漸 近地追蹤所設定之軌跡。然而當系統遭受到大量的不確定性 干擾,為改善其性能,並以模糊系統線上建立不確定性干擾 的數學模式,以設計混合模糊滑動模式欠致動控制。最後對 於不同軌跡、完全或部分已知的摩擦力與不確定性干擾之電 腦模擬驗證所提出方法的有效性與強健性。
中文關鍵詞: 混合模糊滑動模式控制、軌跡追蹤、利雅普洛夫穩定理論、
自走車
英 文 摘 要 : First, the kinematic model, dynamic model of a differential mobile robot (DMR), and the dynamic model of left- and right-wheel DC motors are combined to be a controlled system. The control inputs of the proposed controlled system are the input voltages for the left- and right-wheel motors. The (indirect) outputs are the 2D position and orientation of DMR.
Due to the under-actuated characteristic, the direct reference input (i.e., two desired motor currents) using the first sliding surface is designed so that the 2D position and orientation of DMR are
simultaneously controlled by two motor currents
(i.e., the direct output). The second sliding surface is also designed as the linear dynamics of tracking error of motor current. Under completely (or
partially) known friction and uncertainty, the hierarchical sliding-mode under-actuated control (HSMUC) with suitable conditions is designed such that two motor currents asymptotically track two desired motor currents. Then the asymptotic tracking for 2D position and orientation of DMR is achieved.
To improve system performance for only asymptotical tracking of convex set, an on-line fuzzy modeling of
uncertainty is applied to design a fuzzy-based hierarchical sliding-mode underactuated control (FHSMUC). Finally, the proposed hybrid fuzzy-based hierarchical sliding-mode under- actuated control (HFHSMUC) combining HSMUC and FHSMUC with a
transition maintains both advantages of HSMUC and FHSMUC and simultaneously avoids the disadvantages of HSMCU and FHSUMC. The simulations for various
trajectories, completely and partially known
frictions and uncertainty, and control parameters are shown to evaluate the effectiveness and robustness of the proposed method.
英文關鍵詞: Hybrid fuzzy-based hierarchical sliding-mode under- actuated control, Mobile robot, Lyapunov stability theory
行政院國家科學委員會專題研究計畫成果報告
具有泛用型、欠致動及不確定性的非線性動態系統 之混合模糊滑動模式控制
Hybrid Fuzzy decentralized Sliding Mode Control for a Generalized, Under-actuated and Uncertain Dynamic System
計畫編號:NSC-100-2221-E-011-029 執行期限: 100/08/01~101/07/31
主持人:黃志良 教授 國立臺灣科技大學電機系 共同主持人:吳修明博士 國立臺灣科技大學光機電中心 計畫參與人員:張鈞筌 研究生 國立臺灣科技大學電機系 中文摘要
首先,將差速自走車機器人的運動、動態 方程式及左右輪之馬達動態結合成為一受控 系統,並以左右輪的驅動馬達之輸入電壓為 受控系統之控制輸入,而其(間接)輸出為差 速自走車機器人的 2D 位置與方位。基於欠致 動的特性,以直接的參考輸入(也就是兩個想 要的馬達電流)設計第一層滑動曲面。此外為 了使 2D 位置與其方位同時被兩個馬達電流 所控制,以馬達電流追蹤誤差之線性動態設 計第二層滑動曲面。因此在完全或部分已知 摩擦力以及不確定性下,設計階層滑動模式 欠致動控制,在適當條件下使得兩個馬達電 流分別漸近地追蹤兩個想要的馬達電流,接 著自走車之 2D 位置與其方位也漸近地追蹤 所設定之軌跡。然而當系統遭受到大量的不 確定性干擾,為改善其性能,並以模糊系統 線上建立不確定性干擾的數學模式,以設計 混合模糊滑動模式欠致動控制。最後對於不 同軌跡、完全或部分已知的摩擦力與不確定 性干擾之電腦模擬驗證所提出方法的有效性 與強健性。
關鍵字: 混合模糊滑動模式控制、軌跡追 蹤、利雅普洛夫穩定理論、自走車
Abstract
First, the kinematic model, dynamic model of a differential mobile robot (DMR), and the dynamic model of left- and right-wheel DC motors are combined to be a controlled system. The control inputs of the proposed controlled system are the input voltages for the
left- and right-wheel motors. The (indirect) outputs are the 2D position and orientation of DMR. Due to the under-actuated characteristic, the direct reference input (i.e., two desired motor currents) using the first sliding surface is designed so that the 2D position and orientation of DMR are simultaneously controlled by two motor currents (i.e., the direct output). The second sliding surface is also designed as the linear dynamics of tracking error of motor current. Under completely (or partially) known friction and uncertainty, the hierarchical sliding-mode under-actuated control (HSMUC) with suitable conditions is designed such that two motor currents asymptotically track two desired motor currents. Then the asymptotic tracking for 2D position and orientation of DMR is achieved. To improve system performance for only asymptotical tracking of convex set, an on-line fuzzy modeling of uncertainty is applied to design a fuzzy-based hierarchical sliding-mode underactuated control (FHSMUC). Finally, the proposed hybrid fuzzy-based hierarchical sliding-mode under- actuated control (HFHSMUC) combining HSMUC and FHSMUC with a transition maintains both advantages of HSMUC and FHSMUC and simultaneously avoids the disadvantages of HSMCU and FHSUMC. The simulations for various trajectories, completely and partially known frictions and uncertainty, and control parameters are shown to evaluate the effectiveness and robustness of the proposed method.
一、前言、研究背景及目的
近年來,欠致動系統吸引人的理由為以 下這些優點:少能量消耗、少使用致動器以 及少花費等,欠致動系統的主要特色為在適 當條件下藉由較少的致動器,則控制目標可 被達成,某一類非線性系統使用階層式模糊 滑動 (HFSM)解耦控制達成系統穩定與良好 的解耦性能[1],Raimondi 和 Melluso [2]
提出一個新的模糊適應運動控制系統包含線 上延伸的卡爾曼濾波器用來控制輪型欠致動 車子,此外,在[3],Wai 等人提出串接適應 模糊滑動模式控制(AFSMC)方法包含內外控 制迴路用來穩定和追蹤控制一個非線性兩軸 倒單擺伺服機構,在 2008 年,Marton 等人 [4]提出 LQR,次空間穩定控制器以及結合誤 差公制控制器來做為機器人的強健控制並比 較傳統的球桿系統,另外 Elliot 和 Gans [5]
針對兩輪自走車達成全狀態軌跡追蹤並透過 輸入-輸出線性化漸近地穩定內部動態,
Refsnes 等人[6]針對修長的水下車子提出觀 測器倒階方法用來追蹤想要的航角與轉向 角,[7]-[9]針對某一類欠致動機械系統以及 自主式飛船分別提出滑動模式控制方法,
Cavdaroglu 和 Olgac[10]設計一個想要的固 定控制法則成功地完成具有多重且獨立時間 延遲的欠致動自走車與倒單擺之追蹤控制,
此外 Oryschuk 等人[11]實現且測試一個輪 型欠致動自走車機器人的即時控制,其測試 運動包含移動、旋轉以及上坡。
眾所皆知一個欠致動系統的控制器設計 是一個挑戰的問題,此外欠致動系統具有不 確定性更是困難的工作,探討不確定項且決 定哪些是已知和哪些是未知在很多工程領域 已經是主要的工作,在此研究中,系統不確 定項假設被已知函數所界限(如[12][13])且 用它來設計控制器,由於受控系統為欠致動 特性,至少具有明確關係之兩個滑動表面需 要被建立,當然第一層滑動表面會影響第二 層之穩定性與控制性能,最後這些階層式滑 動曲面必須被聚集用來檢查整體閉迴路之穩 定性與控制性能(例如,[1],[14]-[18])。
當系統遭受到大量的不確定性干擾,為 改善其性能,並以模糊系統線上建立其數學 模式,以設計混合模糊滑動模式欠致動控制。
同時以李阿若夫穩定理論,證明閉迴路系統 之穩定性。最後,以不同軌跡、完全或部分
已知的摩擦力與不確定性干擾之電腦模擬,
驗證所提出方法的有效性與強健性。
本計畫研究成果共分七章,依序為:第 一章為前言、研究背景及目的;第二章為系 統描述及任務陳述;第三章介紹階層式滑動 曲面與參考輸入;第四章為階層式滑動模式 欠致動控制;第五章模糊為基準的階層式滑 動式欠致動控制;第六章為模擬與討論;第 七章為結論。
二、系統描述與問題陳述
2.1 系統描述首先,在 nonholomonic 限制下,差速自 走車機器人系統如下圖所示:
X
wY
w
w
l
rv
w
wL r
Active Wheel Idle
Wheel
x
wy
w圖 1. 差速自走車機器人系統
且其運動模式表示如下:
( ) ( ) cos( ), ( ) ( ) sin( ), ( ) ( )
w w w
w w w
w w
x t v t y t v t
t t
(1)
其中 ( ( ),
x t y t
w w( ),
w( ))t
代表位置以及方位相 對於二維的世界座標,v t 和
w( )
w( )t
為線性 速度和角速度,此外動態模型被表示為 Mv tw( )f tf( ) f t( ), ( )Iw t f( )t ( )t (2) ( )t L
l( )t r( )t
r f t, ( )
l( )t r( )t
r(3) 其中 M 和 I 分別是質量與慣量; L 和 r 分別 為輪子質量中心的距離與車輪半徑; ( )
lt
和r( )
t
為左右輪馬達力矩;f t 和
f( )
f( )t
分別 為摩擦力和摩擦力矩,此外兩顆電樞控制的 DC 馬達之動態描述如下:( ) ( ) ( ) ( )
l l l l bl l l l
L i t R i t K N t u t (4)
( ) ( ) ( ) ( )
r r r r br r r r
L i t R i t K N t u t (5) ( ) ( ), ( ) ( )
l r
l
t N K i t
l t l rt N K i t
r t r
(6)其中
R 、
lR 、
rL 和
lL 是電樞電路電阻和電
r 感;K 和
blbr
K 為反電動勢常數; N 和
lN 為馬
r 達齒輪比; 和l 代表左右馬達之角速r 度;K 和
tltr
K 為馬達力矩常數; ( ) i t 和 ( )
li t 為
r 電樞電流; ( )u t 和
lu t 分別代表輸入電壓。
r( ) 另外v t
w( ),
w( )t
和l( ),t
r( )t
的關係表達如 下:v tw( )
l( )t r( ) 2t
(7)
w( )t
l( )t r( )t
L ( 8 ) 為了表示系統為矩陣型式,定義如下列之狀 態x t
1( )x t
w( ),x t
2( )y t
w( ),x t
3( )
w( ),t
4( ) w( ),
x t
v t x t
5( )
w( ),t x t
6( )i t
l( ), 和7( ) r( )
x t
i t
,是故系統數學模式可為
X t
1( )F X t
1( , ),2( ) 2( , ) ( , ) ( ),
X t
F X t
G X t U t
1( ) 1 1( ), ( )2 2 2( )
Y t
H X t Y t
H X t
(9) 其 中X t
1T( ) x t
1( )x t
2( )x t
3( )x t
4( )x t
5( )
和
2T( ) 6( ) 7( )
X t
x t x t
分別代表間接受控狀態與 直 接 受 控 狀 態 ; 系 統 狀 態 為7
1 2
( ) T( ) T( )T ;
X t X t X t
Y t
1( ) y t
11( )y t
12( )y t
13( )
T3
22( ) 21( ) 22( )T
Y t
y t y t
分別代表間接受控輸 出 與 直 接 受 控 輸 出 ;
2( ) l( ) r( ) T
U t
u t u t
是 控 制 輸 入 且3 5 2 2
1 , 2
H
H
為輸出增益矩陣。接著相 關 nominal 和不確定函數描述如下:( , ) ( ) ( , ), 1, 2,
( , ) ( , )
i i i
F X t F X F X t i G X t G G X t
(10a)
其中
1( ) 11( ) 12( ) 13( ) 14( ) 15( ) T,
F X f X f X f X f X f X
11 1 4 3
12 1 4 3
13 1 5
( ) ( ) cos( ), ( ) ( ) sin( ), ( ) ( ),
f X x t x
f X x t x
f X x t
14 2 6 7
15 2 6 7
( ) ( ) ( ) ,
( ) ( ) ( ) ;
l r
l r
l t r t
l t r t
f X N K x t N K x t Mr f X L N K x t N K x t Ir
2( ) 21( ) 22( ) T,
F X
f X f X
21 6 4 5
22 7 4 5
( ) ( ) ( ) ( ) 2 ,
( ) ( ) ( ) ( ) 2 ;
l
r
l b l l
r b r r
f X R x t K N x t Lx t L
f X R x t K N x t Lx t L
1 11 12 13
14 15
( , ) ( , ) ( , ) ( , ) ( ) ( , ) ( ) ( , ) ;
T
f f
F X t f X t f X t f X t f t M f X t t I f X t
2T( , ) 21( , ) 22( , ) ;
F X t f X t f X t
11 12
21 22
1 0 ( , ) ( , )
, ( , ) .
0 1 ( , ) ( , )
l
r
L g X t g X t
G G X t
L g X t g X t
(10b) 此外,其輸出增益矩陣如下:
H1
I3 03 2
, H2 I2. (11a) 因此間接與直接輸出為
1 2
( ) ( ) ( ) ( ) ( ) ( ) ( ) .
T
w w w
T
l r
Y t x t y t t
Y t i t i t
(11b)
2.2 問題陳述
1 1
2 2
( ) ( , ) ( ) ( , ) ( , ) ( ) X t F X t X t F X t G X t U t
2( ) S t
1( ) E t
( ) X t ( )
U t
, 1,2
i i
n S i
2( ) R t
Learning Law (34)
MR with Uncertainty
HFSMUC Switching Control (28c)
Equivalent Control (28b)
2 2
0
( ) t ( )
p i
K E tKE d H X t2 2( )
2( )
1( ) E t Y t
1 1( ) H X t
2( )
Y t
1( ) R t
2( ) Y td
1( ) p1( ) i0 1( )
t
DdE t DE tDE d Virtual Control Input (22), (23)
1( ) S t
ˆ ( ) ( )iT i i W t
sw( ) U t
eq( ) U t
圖 2. 控制方塊圖
定義如下的間接和直接控制模式之追蹤 誤差:
E t
j( )R t
j( )Y t
j( ),j
1, 2. (12) 其計畫的問題為設計控制輸入使得間接輸出 追 蹤 間 接 參 考 輸 入 ( 參 考 圖 2)
1( ) d( ) d( ) d( )T
R t
x t y t t
。首先經由第一 層 滑 動 曲 面 設 計 出 直 接 參 考 輸 入
2( ) ld( ) rd( ) T
R t
i t i t
,使得直接輸出Y t 可
2( ) 控制間接輸出Y t ,依序地第二層滑動模式
1( ) 推導出階層式滑動模式欠致動控制使得在適 當條件下直接輸出Y t 漸近地追蹤直接參考
2( ) 輸入R t 。總結而言,
2( )Y t 趨近
2( )R t 將使
2( ) 得間接輸出Y t 趨近
1( )R t 。
1( )三、階層式滑動曲面與參考輸入
因為提出架構為欠致動控制系統,設計 如下的第一層滑動曲面:
0
1( ) d 1( ) i 1 i t 1( )
S t D E t D E D
t E d (13) 其 中 D D Dd, p, i3 3 為 固 定 對 角 化 矩 陣 且3 1( )
S t
。此外D D
d, pD 被選為使得第一層
i 滑動曲面是穩定的且D 是非奇異的。因為系
d 統擁有兩個控制輸入,想要的軌跡x t 和
d( )d( )
y t 可以任意被指定,因此想要的軌跡表示
如下:
1
1 2 3
( ) ( ) ( ) ( ) ( ) ( ) ( )
T
d d d
T
d d d
R t x t y t t x t x t x t
(14)
( ) atan2( , ) 2
d
t x
dy
dk
(15) 其中 atan2 為計算反三角正切角度的兩個參 數之函數且k選為使得
d( )t
為連續。在完成 上 述 追 蹤 後 , 直 接 參 考 輸 入
2( ) ld( ) rd( )T 6d( ) 7d( )T
R t
i t i t
x t x t
可 經 由 利 雅 普洛夫穩定性準則設計X t
2( )R t
2( ),其將驅使 間接輸出Y t 趨近間接參考輸入
1( )R t ,其細節
1( ) 如下:
†
2, 1 1 1
1 123 1 1
( ) ( ) ( ) ( )
( ) ( ) ( )
eq d d
p i
R t D B X D R t A X D R t F X D E t
(16a)
†
2, 1
11 1 12 1 1 1 1
( ) ( )
( ) ( ) ( ) 1
sw d
R t D B X
S t S t S t
(16b) 其中D B Xd ( 1)†
D B Xd ( 1) T D B Xd ( 1)
1 D B Xd ( 1)T2 2為假反矩陣,D B Xd ( 1) T D B Xd ( 1)為非奇異,
11 diag 111, 112, 113 ;
12 diag
121, 122, 123
0 為切換增益矩陣;
1 為不確定控制增益的0 上限值;
1 代表第一層滑動曲面之邊界0 層。首先敘述如下之理論:理論一:
考慮間接動態模式,即
1( ) 1( , ),
X t
F X t
1( ) 1 1( ).
Y t
H X t
具有如下的不確定之上限:1 1 2, 123 1
1 1 2,
( , , ) ( , )
( , ) ( ) ( )
eq p
d eq
K X R t D F X t D A X t B X R t
(17a)
1( 1, 2,eq, ) 10 11 1( 1, 2,eq), 1( ), 2,eq,
K X R t p X R X t R t( 1 7 b ) 則以間接參考輸入(16)控制間接動態模式,
將使得第一層滑動曲面收斂至集合
1: Ds
1 1
3
1( ) 1( )
s s
D S t
S t
s (18)其中
s
s1 m1 m
124m m
2 0 2m
2
(19a)
m
2
(19a)
2 11 1 3
1 1 11 12 10 11 1 1 2, 1 1
0 1 10 11 1 1 2,
2 0,
( , ) 2,
( , ) 0.
eq
eq
m I
m p X R
m p X R
(19b)
而且 E t( ) , E t1( ) ss1 1
2 Dd
當t 及
X t1( )
為 UUB.
依序地,定義如下的第二層滑動曲面:
0
2( ) p 2( ) i t 2( )
S t
K E t
K
tE d
(20) 其 中 K Kp, i2 2 為 對 角 化 常 數 矩 陣 且2 2( )
S t
,此外設定K 和
pK 矩陣使得第二層
i 滑動曲面為穩定。四、階層式滑動模式欠致動控制
緊接著設計如下的階層式滑動模式欠致 動控制:U t( )Ueq( )
t
U
sw( )t
(21a) Ueq( )t K H Gp 2 1
K R tp2( )K H F Xp 2 2( )K E ti 2( )
(21b)
1 2
21 2 22 2 2 2 2
( )
( ) ( ) ( ) 1
sw p
U t K H G
S t S t S t
(21c) 其中K H Gp 2 為非奇異; 21 diag
211, 212
0,;
22 diag 221,222 0
為 切 換 增 益 矩 陣 ;
2 0
為第二層滑動曲面的邊界層;
2 為0 不確定控制增益的上限值。理論二:
考慮受控系統(9)-(11)具有如下的不確 定干擾之上限:
2( , eq, ) p 2 2( , ) 2 ( , ) eq( )
K X U t K H F X t H G X t U t (22a)
2( , eq, ) 20 21 2( , eq), ( ), eq( ),
K X U t p X U X t U t t (22b)
則以階層式滑動模式欠致動控制(21)於受控 系統(9)-(11),將使得第二層滑動曲面收斂 至集合Ds2:
2 2
2
2( ) 2( )
s s
D S t
S t
s (23) 其中
s
s2 v1 v
124v v
2 0 2v
2 (24a)
v
2 (24a)
2 21 2 2
1 2 21 22 20 21 2 2 2
0 2 20 21 2
2 0,
( , ) 2,
( , ) 0.
eq
eq
v I
v p X U
v p X U
(24b)
而且
X t U t( ), ( )
為 UUB.五、模糊為基準的階層滑動模式欠致 動控制
首先,敘述如下之模糊函數近似理論。
理論三:
假 設 Z t( )D Z( ) ( 屬 於 n 的 compact subset),( , ) :Z t D m為一連續函數。
存在一常數f 一整數0,
L
(模糊歸屬函數 之 數 目 ) 及 實 數 矩 陣 W L m , 其 中M,
W F W F 為 Forbenious norm, 使 得 (Z t, )WT( )Z ( , ),Z t
其 中( )Z 代 表 已
知 的 模 糊 基 礎 函 數 , ( , )Z t f, ( ) ( )
Z t D Z
和 t 0.
根據理論三,屬於不同的 compact 次集 合D Z1( 1)andD Z2( 2)的不確定干擾(17)和(22) 將被如下模糊系統近似[19]-[22]:
( , ) ( ) ( , ), 1, 2
i
T
i i Wi i Zi Z t ii
K Z t (25) 其中
Z t
1T( ) X t R
1T( ) 2,Teq( ) ,t
Z t
2T( )X t U t
T( ) eqT( ) , 且X t
( ) x t
4( )x t
5( )x t
6( )x t
7( ) ;
T( 4 )
,
Li i
Wi 1, 2
i
為 未 知 的 非 惟 一 的 常 數 矩 陣 ,1
,2 ,
( ) 1 ( ) ... ( ) , i ,
i
T L
i i L
i Zi
Zi
Zi
i
1, 2 , 代表已知的模糊基礎函數,其第 j 分量為2 2
, ( ) exp ( ) , , ,
i j Zi
Z
i t ci j i j
L ci, i j, ,i j, 其 下 標 為
i
=1,2,j
==2, 3,…, ;Li 而且 ( , ) ,i
Z t
i fi
( ) ( ),i i i
Z t D Z
i1, 2,和t0. 並設計如下的 學習法則:
W tˆi( ) i i(Z S ti) ( )i i iW t iˆi( ), 1, 2
( 2 5 ) 其 中 W tˆ ( )i Li ( 4 i) 代 表 學 習 的 權 重 ;
1, , i
i i 0L L
i diag
L 代表學習的矩
陣增益; 及
1, , i
i i 0L L
i diag
L 代表
學習的 e-modification 矩陣增益,以確保學 習的權重為有限值。
理論四:
延 伸 理 論 一 , 並 學 習 不 確 定 干 擾
1(
Z t
1, ). 即方程式(16a)由(26)取代。
1
1
†
2, 1 1
123 1 1 1 1 1
( ) ( ) ( ) ( )
( ) ( ) ( ) ˆ ( ) ( ) .
eq d d d
T
p d i
R t D B X D Y t A X D Y t F X D E t W t Z
(26) 將使得操作點收斂至集合
1:
D
f
1
1 1 1
3 2
1( ) , 1( ) 0 1( ) , 1( )
f f
L
F f
D S t W t S t s W t w
(27) 其中
w
f1
1W
M1, 4s
f1 qf1 q
2f1 q q
f2 f0 2q
f2
q
f2(28)
1
1
2 2 1 2 21 22 2 3
0 2
, 2, 0
f s f f
f f
q q q
q
(29)
2 1 2 2 1 2 2 1 2
1/21
tr
1T 1tr
1T 1 1tr
1T 1 2 .
(30) 則
E t
( ) ,E t
1( ) s
f1
1
2D
d
當 t ,而且 X t W t 為 UUB.
1( ), ˆ1( )
緊接著學習不確定干擾設計模糊為基準 的階層滑動模式欠致動控制。
理論五:
延 伸 理 論 二 , 並 學 習 不 確 定 干 擾
2(
Z t
2, ). 即方程式(16a)由(31)取代。
2
1
2 2 2
2 2 2 2
( ) ( ) ( )
( ) ˆ ( )
eq p p d p
T i
U t K H G K Y t K H F X K E t W Z
(31) 將使得操作點收斂至集合
2:
D
f
2
2 2 2
2 2
2( ) , 2( ) 0 2( ) , 2( )
f f
L
F f
D S t W t S t s W t w (32)
其中
w
f2
2W
M2, 4s
f2 vf1 v
2f1 v v
f2 f0 2v
f2
v
f2(33)
2
2
2 2 1 2 21 22 2 3
0 2
, 2, 0
f s f f
f f
v v v v
( 3 4 )
2 1 2 2 1 2 2 1 2
1/22
tr
2T 2tr
T2 2tr
2T 2 2 .
(35) 則
X t W t U t 為 UUB.
( ), ˆ2( ), ( )
最後,將混合模糊滑動模式欠致動控制 之 equivalent 控制表示如下:
†
2, 1 1 1
1 123 1 1 1 1 1 1 1
( ) ( ) ( ) ( )
( ) ( ) ( ) ˆ ( ) ( ) .
eq d d
T
p i
R t D B X D R t A X
D R t F X D E t n S W t Z
(36)
1
2 2 2 2
2 2 2 2 2 2
( ) ( ) ( )
( ) ˆ ( )
eq p p p
T i
U t K H G K R t K H F X K E t n S W Z
(37) 其中
1
2
1 1 2
0, as ( ) 1, as ( )
( ) , otherwise
i
i
i i i
s
s
s s s
i
i i i
i
S t n
S S t n
n S t n n
n
(38)
1 2 0, 1, 2.
i i i i
s s s f
n s n s i (39)
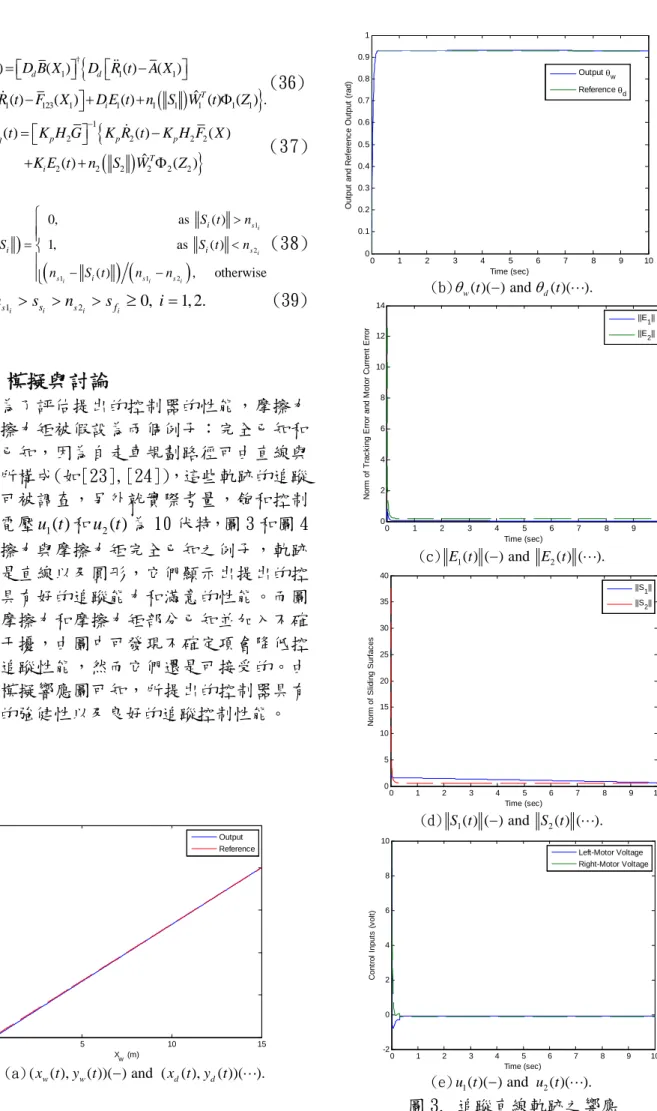
六、模擬與討論
為了評估提出的控制器的性能,摩擦力 和摩擦力矩被假設為兩個例子:完全已知和 部分已知,因為自走車規劃路徑可由直線與 圓弧所構成(如[23],[24]),這些軌跡的追蹤 響應可被調查,另外就實際考量,飽和控制 輸入電壓
u t 和
1( )u t 為 10 伏特,圖 3 和圖 4
2( ) 為摩擦力與摩擦力矩完全已知之例子,軌跡 分別是直線以及圓形,它們顯示出提出的控 制器具有好的追蹤能力和滿意的性能。而圖 5 為摩擦力和摩擦力矩部分已知並加入不確 定之干擾,由圖中可發現不確定項會降低控 制器追蹤性能,然而它們還是可接受的。由 這些模擬響應圖可知,所提出的控制器具有 高度的強健性以及良好的追蹤控制性能。0 5 10 15
0 5 10 15 20 25
Xw (m) Yw (m)
Output Reference
(a) (x t y tw( ), w( ))( ) and ( x t y td( ), d( ))( ).
0 1 2 3 4 5 6 7 8 9 10
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Time (sec)
Output and Reference Output (rad) Output w Reference d
(b)w( )( ) and t d( )( ).t
0 1 2 3 4 5 6 7 8 9 10
0 2 4 6 8 10 12 14
Time (sec)
Norm of Tracking Error and Motor Current Error
||E1||
||E2||
(c) E t1( ) ( ) and E t2( ) ( ).
0 1 2 3 4 5 6 7 8 9 10
0 5 10 15 20 25 30 35 40
Time (sec)
Norm of Sliding Surfaces
||S1||
||S2||
(d) S t1( ) ( ) and S t2( ) ( ).
0 1 2 3 4 5 6 7 8 9 10
-2 0 2 4 6 8 10
Time (sec)
Control Inputs (volt)
Left-Motor Voltage Right-Motor Voltage
(e)u t1( )( ) and u t2( )( ).
圖 3. 追蹤直線軌跡之響應
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 -2
-1.5 -1 -0.5 0 0.5 1 1.5 2
Xw (m) Yw (m)
Start Point End Point
(a)(x t y tw( ), w( ))( ) and ( x t y td( ), d( ))( ).
0 2 4 6 8 10 12 14 16
0 1 2 3 4 5 6 7 8 9 10
Time (sec)
Output and Reference Output (rad)
Output w Reference d
(c)w( )( ) and t d( )( ).t
0 2 4 6 8 10 12 14 16
0 2 4 6 8 10 12 14 16 18
Time (sec)
Norm of Tracking Error and Motor Current Error
||E1||
||E2||
(d) E t1( ) ( ) and E t2( ) ( ).
0 2 4 6 8 10 12 14 16
0 10 20 30 40 50 60
Time (sec)
Norm of Sliding Surfaces
||S1||
||S2||
(e) S t1( ) ( ) and S t2( ) ( ).
0 2 4 6 8 10 12 14 16
-4 -2 0 2 4 6 8 10
Time (sec)
Control Inputs (volt)
Left-Motor Voltage Right-Motor Voltage
(f)u t1( )( ) and u t2( )( ).
圖 4. 追蹤圓形軌跡之響應
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
Xw (m) Yw (m)
Start Point End Point
(a) (x t y tw( ), w( ))( ) and ( x t y td( ), d( ))( ).
0 2 4 6 8 10 12 14 16 18 20
0 2 4 6 8 10 12
Time (sec)
Output and Reference Output (rad)
Output w Reference d
(b)w( )( ) and t d( )( ).t
0 2 4 6 8 10 12 14 16 18 20
0 50 100 150 200 250
Time (sec)
Norm of Tracking Error and Motor Current Error
||E1||
||E2||
(c) E t1( ) ( ) and E t2( ) ( ).