國立臺灣大學電機資訊學院生醫電子與資訊學研究所 碩士論文
Graduate Institute of Biomedical Electronics and Bioinformatics College of Electrical Engineering and Computer Science
National Taiwan University Master Thesis
運用特徵追蹤法在三維超音波平面波影像上的運動分析 Motion Analysis In Three Dimensional Ultrasound Plane-Wave Excitation Imaging By Feature Tracking
曾令儀 Lin-Yi Tseng
指導教授:李百祺博士
Advisor: Pai-Chi Li, Ph.D.
誌謝
一直以來,能夠進修碩士班是我的願望,而能夠在老師的超音波研究團隊中 學習更是我的夢想,如今,這份論文的完成正代表了我的願望和夢想的實現。雖 然只有短短的兩年,卻是學習歷程中最豐收和紮實的。在此,首先要感謝老師對 我的包容和指導,在我駑鈍不明時適時的給予提點,在我意志薄弱時給予勉勵和 督促,而老師高標準的自我要求以及嚴謹自律的處事態度,更是我砥礪自己的最 佳典範。再者,要感謝實驗室的夥伴們,不斷的給我支持和鼓勵,你們真摯的情 誼陪伴我渡過一關又一關,也帶給我無數的歡樂和感動;特別感謝昱欣學姐、博 文學長耐心的指導和大力的協助,寶育學長、佳倫學長多次費心的解惑和指引,
尤其是已畢業的耿璽學長,在工作繁忙之際仍不吝給予教導,不勝感激! 另外,謝 謝上景、哲宇和浥涵,不但在課業上鼎力相助,也分擔了我許多的喜怒哀樂,能 夠成為你們的同學,是我的福份。
最後,我最要感激的是我的家人。如果沒有公公、婆婆、爸爸、媽媽的寬容 和協助,沒有老公的包容和體諒,沒有羽辰、羽晴寶貝們的笑容和親吻,我是不 可能完成這份論文,實現我的願望。他們是我的支柱,讓我更有勇氣去面對無數 艱難的挑戰和未知的將來,堅定的不斷向前邁進。還有許多默默支持和協助我的 好姐妹、好朋友們,謝謝你們,因為有你們的陪伴,這條路一點也不孤單。
中文摘要
心臟超音波應變影像是臨床用來評估心肌運動狀態的檢測工具,其主要的原 理是應用斑點追蹤法偵測心臟超音波動態影像心肌內外膜上斑點位移前後的相對 位置,再進一步推估出心肌應變量並藉以提供臨床醫生判定心臟功能狀態的資訊,
但目前臨床上僅限於應用在二維超音波影像上。由於心臟是人體內博動速度最快 的器官,並合併有伸長、縮短、扭轉等複雜的運動模式,要能完整獲得如此複雜 的 形 變 資 訊 , 就 必 須 要 發 展 即 時 的 三 維 心 臟 超 音 波 應 變 影 像 (Real time 3D echocardiographic strain image );而超音波平面波成像法擁有最快的成像速率,能 夠達到即時成像的可能,另外由斑點追蹤法衍生而來的特徵追蹤法能夠解決斑點 追蹤法在高維度影像資訊中遭遇龐大運算量的問題,因此本研究的目的是希望結 合平面波成像法與特徵追蹤法以建立即時的三維心臟超音波應變影像。
在本研究中,我們模擬了三維平面波動態影像,並進行斑點追蹤與特徵追蹤 的分析比較。結果發現,平面波影像較雙向聚焦影像在橫向位移上有較大的追蹤 誤差,若將平面波影像在極座標上進行追蹤會有較佳的追蹤結果;特徵追蹤法較 傳統斑點追蹤法有極佳的運算效能,但追蹤誤差較大;應用在旋轉的影像上時,
特徵追蹤法與斑點追蹤法都有良好的追蹤正確率,但特徵追蹤的誤差仍較大;在 特徵追蹤演算法中,當篩選特徵斑點的域值越大或內核(kernel)設定範圍越大時,
特徵追蹤的追蹤誤差會越低,但所篩選的特徵斑點數目也會越少。根據上述各項 進行的分析結果,我們認為結合平面波成像法與特徵追蹤法來建立即時三維心臟 超音波應變影像是可行的。最後,我們嘗試著將特徵追蹤法應用於臨床三個月大 嬰兒的三維心臟超音波影像分析上,由於受限於臨床超音波影像品質,心臟內外 膜上篩選的特徵斑點過少,所得到的三維心臟應變影像無法表示整體心臟運動形 態,因此未來還需要針對特徵追蹤法在臨床影像上的應用作進一步探討和分析。
ABSTRACT
Echocardiographic strain imaging is a clinical tool to assess the myocardial motion.
Speckle tracking is typically applied to detect displacement of speckles on endocardium and epicardium. Furthermore, it can estimate the myocardial strain to help clinicians to evaluate cardiac functions, but its clinical applications are mainly limited to two-dimensions. As the heart is the fastest-moving organ, and is associated with elongation, shortening, torsion movement patterns, it is necessary to develop real-time three-dimensional strain echocardiography image for the acquisition of complete information of such a complex deformation. In view of the fact that plane-wave excitation imaging has the highest frame rate which makes it possible to achieve real-time three-dimensional imaging, and that the other feature tracking method derived from the speckle tracking method is able to solve the problem that three-dimensional speckle tracking is too computationally intensive for practical use, the aim of this study is to combine the plane-wave excitation imaging method and the feature tracking method to construct three-dimensional echocardiographic strain images. In this study, we simulate three-dimensional plane-wave excitation (PWE) images with object motion on which speckle tracking and feature tracking methods are applied and their efficacies are compared. The results show that PWE images result in greater tracking errors in lateral displacements when compared with two-way focused images. In addition, better
tracking results can be obtained if the speckle tracking algorithm is implemented in polar coordinates. Furthermore, although the feature tracking method is more computationally efficient than the traditional speckle tracking method, its tracking error is relatively large. On the other hand, when applied on the rotated images, the feature tracking method and the speckle tracking method both have good tracking accuracy, but the error in the feature tracking case is still larger. In the feature tracking algorithm, the greater the threshold or the larger kernel size is set, the higher the tracking accuracy will be, but the number of feature patterns will also decrease. According to the results above, we believe that it is feasible to combine the plane-wave excitation imaging with feature tracking to constitute three-dimensional echocardiographic strain imaging. Finally, we apply feature tracking to clinical three-dimensional echocardiographic data of a three-month-old baby. Due to limited image quality, the feature patterns of endocardium and epicardium are not representative of the overall movement of the heart. Future researches will deal with the problems of the feature tracking method in clinical applications.
Keywords: echocardiographic strain imaging, speckle tracking, feature tracking, high frame rate imaging, plane-wave excitation imaging.
目錄
口試委員審定書………..i
誌謝……….ii
中文摘要………iii
ABSTRACT ………..iv
目錄………vi
表目錄………ix
圖目錄………x
第一章 緒論……….. 1
1.1 前言………. 1
1.2 研究動機………. 2
第二章 心臟超音波應變影像……….. 4
2.1 心肌組織的應變………. 4
2.1.1 徑向應變(Radial Strain)……….. 5
2.1.2 環向應變(Circumferential Strain)………... 6
2.1.3 縱向應變(Longitudinal Strain)……… 7
2.2 超音波應變量量測方法………. 8
2.2.1 都卜勒頻移估計速度梯度法………... 8
2.2.2 斑點追蹤法……… 10
第三章 超音波平面成像……… 12
3.1 高速超音波成像(High Frame Rate Imaging) ……….… 12
3.1.1 波束形成原理(Beamforming Principle) ……….….. 12
3.1.2 聚焦成像(Focus Imaging) ……….………... 16
3.1.3 多重波束傳輸(Multiple Beam Transmission) ………….…. 17
3.2 平面波發射成像(Plane-wave Excitation Imaging, PWE)….….. 18
第四章 超音波影像斑點追蹤演算法………….……….. 20
4.1 斑點特性與應用………….………... 20
4.2 斑點追蹤演算法………….………... 21
4.3 特徵斑點追蹤演算法………….………... 25
4.4 應變量與相關係數間的關係……….……... 27
第五章 斑點追蹤法於三維心臟超音波影像之應用……….……….. 33
5.1 應用於模擬之三維平面波影像……….………...…….. 33
5.1.1 模擬方法……….……….. 33
5.1.2 平面波影像和雙向聚焦影像進行傳統斑點追蹤法的比較… ……….……….. 36
5.1.3 在極坐標系和直角坐標系下進行傳統斑點追蹤法的比較 … ……….……….. 41
5.1.4.2 不同旋轉角度….……….…….. 47
5.1.5 應用特徵追蹤法於三維平面波影像….……….…. 54
5.1.5.1 不同域值對追蹤結果的影響….……….…….. 54
5.1.5.2 不同大小的內核(kernel)設定對追蹤結果的影響…... 56
5.2 應用特徵追蹤法於臨床三維心臟超音波影像………. 59
第六章 結論與未來工作……….………….…. 66
6.1 結論……….… 66
6.2 未來工作……….….……….….. 67
參考文獻………..…………..….….. 68
表目錄
表 5-1 模擬三維平面波影像設定之參數………..………..….…. 34 表 5-2 研究中設計 5 組三維平面波影像所分別具有之散射子數目... 44 表 5-3 在特徵追蹤法比較中所設計之 5 組不同的域值………..….... 54 表 5-4 在特徵追蹤法比較中所設計之 5 組不同大小的內核範圍….. 56
圖目錄
圖 2-1 一維物體伸長形變示意圖………..……….…. 4
圖 2-2 局部心臟座標系統………..……….…………. 5
圖 2-3 徑向應變示意圖………..……….………. 5
圖 2-4 環向應變示意圖………..……….………. 6
圖 2-5 縱向應變示意圖………..……….………. 7
圖 2-6 組織都卜勒速度、應變速率及應變量變化圖….…………..…. 8
圖 2-7 TOSHIBA 三維斑點追蹤法心臟超音波應變影像……… 10
圖 3-1 發射聚焦波束形成示意圖…..…………..……….………. 13
圖 3-2 接收聚焦波束形成示意圖…..…………..……….………. 13
圖 3-3 超音波成像聚焦點與探頭陣列單元座標位置示意圖……….. 14
圖 3-4 超音波發射聚焦波束影像…..…………..……….………. 16
圖 3-5 同時發射兩條波束的多重傳輸波束影像……….………. 17
圖 3-6 (a) 超音波平面波發射成像示意圖 (b) 模擬之二維超音波平面 波影像……….………. 18
圖 4-1 超音波影像斑點形成示意圖……….………. 20
圖 4-2 斑點追蹤內核與搜尋範圍設定示意圖……….. 22
圖 4-3 斑點追蹤相似性搜尋過程示意圖……….. 22
圖 4-4 不同散射子其射頻訊號經位移後相對位置變化示意圖…….. 23
圖 4-5 斑點追蹤後運算處理位移向量示意圖……….. 24 圖 4-6 特徵追蹤法示意圖……….. 25 圖 4-7 特徵追蹤法演算法中特徵形態擷取示意圖……….…………. 26 圖 4-8 特徵斑點追蹤演算法中相似性搜尋過程示意圖….…………. 27 圖 4-8 三維心臟超音波模擬影像之不同旋轉角度及形變率相關係數
變化圖……….. 28 圖 4-10 一維實際應變量與相關係數變異性關係圖….………..……... 29 圖 4-11 一維實際應變量與估計應變量關係圖….………... 29 圖 4-12 一維實際應變量與估計應變量乖離率之關係圖………...…... 30 圖 4-13 模擬在不同應變量情況下使用與不使用時間延展法之相關係
數比較….………. 31 圖 4-14 在軸向擠壓均質仿體實驗中採用時間延展法前後的相關係數
對應圖….………. 32 圖 5-1 (a) 矩陣探頭旋轉式掃描示意圖 (b) 旋轉掃描資料格式….. 33 圖 5-2 模擬之雙層空心圓球上散射子的分佈位置………. 34 圖 5-3 運用 field II 模擬之陣列探頭示意圖………. 35 圖 5-4 field II 模擬之三維 (a) 平面波 xz 平面影像 (b) 雙向聚焦 xz
平面影像.………. 36
圖 5-6 平面波影像與雙向聚焦影像橫向位移相關係數分佈圖……. 37 圖 5-7 平面波影像與雙向聚焦影像軸向位移斑點追蹤錯誤率分佈圖..
.……….…. 39 圖 5-8 平面波影像與雙向聚焦影像橫向位移斑點追蹤錯誤率分佈圖..
.……….…. 39 圖 5-9 平面波影像與雙向聚焦影像軸向位移前後的影像…………. 40 圖 5-10 運用 field II 分別模擬在極座標系與直角座標系之三維平面影
像………..………….…. 41 圖 5-11 分別在極座標系與直角座標系進行斑點追蹤的相關係數分佈
圖……….………..………….…. 42 圖 5-12 分別在極座標系與直角座標系進行斑點追蹤的錯誤率分佈圖 .………..….…. 43 圖 5-13 5 組不同資料量分別進行斑點追蹤和特徵追蹤的相關係數分佈
圖……….……….……..………….…. 44 圖 5-14 5 組不同資料量分別進行斑點追蹤和特徵追蹤的錯誤率分佈
圖………..………...…..………….….... 45 圖 5-15 5 組不同資料量分別進行斑點追蹤與特徵追蹤 (a) 運算時間
比較圖 (b) 絕對平均錯誤率分佈圖..…..…………...……... 46 圖 5-16 5 組不同旋轉角度平面波影像分別進行斑點追蹤與特徵追蹤 的相關係數分佈圖..…..……...…...………..………….. 48
圖 5-17 旋轉 theta = 3 degree 的平面波影像分別經斑點追蹤與特徵追蹤 後估計的旋轉角度分佈圖…….……..……….. 49 圖 5-18 旋轉 theta = 6 degree 的平面波影像分別經斑點追蹤與特徵追蹤
後估計的旋轉角度分佈圖…….………….………..……..….. 50 圖 5-19 旋轉 theta = 9 degree 的平面波影像分別經斑點追蹤與特徵追蹤
後估計的旋轉角度分佈圖…….………….……….. 51 圖 5-20 旋轉 theta = 12degree 的平面波影像分別經斑點追蹤與特徵追
蹤後估計的旋轉角度分佈圖…….……….. 52 圖 5-21 旋轉 theta = 15degree 的平面波影像分別經斑點追蹤與特徵追
蹤後估計的旋轉角度分佈圖…….……….. 53 圖 5-22 5 組不同域值在特徵追蹤演算法中篩選出之特徵斑點數目…..
……….….... 55 圖 5-23 5 組不同域值在特徵追蹤後各組之相關係數分佈圖….……. 55 圖 5-24 5 組不同域值經特徵追蹤後各組絕對平均誤差值及誤差分佈
標準差………..…………...……….……... 56 圖 5-25 5 組不同內核範圍大小在特徵追蹤演算法中篩選出之特徵斑
點數目………..……….……... 57 圖 5-26 5 組不同內核範圍大小之特徵追蹤相關係數分佈圖……... 57
及誤差分佈之標準差……….……... 58 圖 5-28 三個月嬰兒臨床三維心臟超音波影像………..…….……….. 60 圖 5-29 臨床資料進行特徵追蹤後之不同深度心肌應變影像的橫切面...
……….…... 63 圖 5-30 心肌內外膜上每組特徵斑點向量所計算出的應變量分佈圖...…
……….…... 64 圖 5-31 臨床心臟超音波影像在心內膜與心外膜上的特徵斑點進行特....
徵追蹤法後之相關係數分佈圖….……….…….…... 64 圖 5-32 TOSHIBA ARTIDA 3D Wall Motion Tracking 斑點位置設定示...
意圖……….………... 65
第一章 緒論
1.1 前言
隨著老年化社會的來臨,罹患心臟疾病的人口也越來越多,大部份的老年人 都需要面對冠狀動脈疾病、缺血性或非缺血性的心肌病變、心衰竭等致命的心臟 病變。臨床上,藥物、手術、再同步化治療(Resynchronization therapy)等都是可考 慮的治療方法,但在決定採用何種方法之前,必須先對病患的心肌運動狀態有所 了解,這是因為心肌的運動狀態能夠用來判斷心臟的功能情況。心臟超音波因有 非侵入性、安全性高、低成本、可移動至病床旁檢測等特性,並且具有高度的時 間解析度可提供即時成像的優勢,因此是在臨床上很好的協助診斷工具[9]。由於 心臟較身體其他器官最大的不同處在於它是體內形變運動最大、博動速率最快者,
且大部分心臟疾病都有心搏過速的問題,超音波影像需要能精確的呈現最短時間 內的心臟影像變化;另一方面,以往心臟超音波影像主要是以二維影像為主,但 絕對無法呈現實際心臟三維結構的完整資訊,因此目前皆致力於三維影像的發展,
不過三維影像卻避免不了成像速率變慢的問題,由此看來超音波影像系統如何能 獲得最短時間內三維心臟形變影像資訊是目前主要的課題之一。現今臨床上商用 的即時三維心臟超音波影像如 Philips SONOS7500 system,使用 2-4MHz 矩陣探頭 (Matrix transducer),在深度 10cm 處縱向解析度為 0.5mm、橫向解析度為 2.5mm,
成像速率 20~25Hz[19],但這僅僅是三維成像系統,目前臨床上並沒有可即時的估 計三維心臟形變之影像系統。一般而言若要達到即時成像的要求,成像速率需要 30Hz 以上,如此一來,需使用更高成像速率的掃描方式才能達到要求,而超音波 平面波發射成像(Plane-wave excitation imaging)是成像速率最快的方式,僅需要一
1.2 研究動機
心臟超音波的應變影像(Echocardiographic strain image)是臨床常用來評估心 肌的運動狀態的檢查項目,其主要原理是透過量測心肌形變量來描述心肌組織的 特性。早期超音波量測心肌形變的方法主是藉由都卜勒頻移(Doppler frequency shift) 估計心肌組織每個位置移動的速度,再根據相鄰組織位置間速度梯度(Velocity gradient)變化計算出心肌的應變量(Strain),但此種方法具有對雜訊非常敏感、成像 速率(Frame rate)過低造成應變量的低估、只能量測軸向應變量(Angle dependence)、
無法偵測在不同平面間的運動(Through-plane motion)以及因呼吸造成量測過程角 度改變而使應變量出現誤差等限制[14],因而發展出另一種利用斑點追蹤法 (Speckle tracking)來估計心肌應變量的方法。斑點追蹤法的量測原理是追蹤超音波 影像中固定的斑點型態以計算出運動位移向量,並進一步估算出形變量,此種演 算原理與角度無關,能夠偵測多維度的運動,因此能擺脫大部分都卜勒頻移演算 法的限制,我們也據此認為利用斑點追蹤法能夠估算出較為正確的心組織應變量,
進而能更正確的評估出心肌運動狀態以判斷心臟功能情況[7], [9], [10]。
要準確評估心肌運動形變狀態是很不容易的,因為心臟的運動型態是同時結 合了沿著從心尖到基底心肌伸長和縮短以及扭轉的混合運動模式[9],而且心臟搏 動速度很快,大約 1 秒之內完成整個收縮舒張週期,因此如果要正確的評估心臟 功能就必須要能得到具高速成像速率的三維應變影像(High frame rate 3D strain image) 以瞭解心臟從收縮到舒張週期間各個階段的形變狀態。目前大部分應用斑 點追蹤法進行的心臟超音波應變影像只限於二維平面,如此會造成在追蹤不同平 面間運動時有顯著性的追蹤誤差,亦無法呈現真實的三維心肌運動模式,因此近 年來皆致力於發展三維斑點追蹤的心臟超音波應變影像[2], [7]。然而,由於斑點追 蹤法需追蹤整張影像的斑點位移,當三維影像資訊量較二維影像大幅增加時,三 維斑點追蹤技術會面臨到耗費大量運算時間的問題,從而發展出了只追蹤具有顯
能夠大幅的降低運算的資料量以及增加計算效能[2], [3], [5]。本研究的研究目的是 希望結合屬高速成像速率的超音波平面波成像技術(Plane-wave excitation imaging) 和三維特徵斑點追蹤法來建立即時有效的心臟超音波三維應變影像,並實際應用 於臨床心臟超音波影像上。
第二章 心臟超音波應變影像
2.1 心肌組織的應變
應變(Strain)的定義是相對於原物體形狀的形變量,亦稱為 Lagrangian strain。
在一維空間中,物體僅只有伸長或縮短的可能,其伸長的型變狀態如圖所示。
圖 2-1 一維物體伸長形變示意圖 L0:物體原長度
L:物體伸長形變後的長度[10]
因此其應變量(ɛ)則為其單位長度的變化量如式 2-1:
式 2-1
若應用在心肌組織形變上,根據局部心臟座標系統(Local heart coordinate system, 圖 2-2),則會有徑向應變(Radial strain)、環向應變(Circumferential)以及縱向應變 (Longitudinal strain)等三種應變量[10], [15]。
圖 2-2 局部心臟座標系統[11]
2.1.1 徑向應變(Radial strain)
在同一心肌短軸面上,同一徑向上心內膜及心外膜相對應的位置其原始距離 為 L0i,經形變位移後的相對距離為 Lfi ,Lfi在原徑向上的投影量為 LfiR,如圖 2-3 所示:
L0i:原始相對距離 Lfi:位移後相對距離
Radial : 徑向
Circumferential : 環向 Longitudinal : 縱向
則此位置的心肌組織放射向應變可表示為下式:
式 2-2
2.1.2 環向應變量(Circumferential strain)
在同一心肌短軸面上,心內膜或心外膜兩相鄰位置間的原始弧長為 L0i,經形 變位移後的弧長為 Lfi,如圖 2-4 所示:
L0i:原始弧長 Lfi:位移後的弧長
圖 2-4 環向應變示意圖[21]
則此位置的心肌組織環向應變可表示為下式:
式 2-3
2.1.3 縱向應變量(Longitudinal strain)
在同一心肌長軸面上,與相鄰兩短軸面相交位置間的原始長度為 L0i,經形變 位移後的長度為 Lfi,如圖 2-5 所示:
L0i:原始弧長 Lfi:位移後的弧長
圖 2-5 縱向應變示意圖[21]
則此位置的心肌組織縱向應變可表示為下式:
式 2-4
2.2 超音波心肌應變量量測方法 2.2.1 都卜勒頻移估計速度梯度法
心肌運動的速度可以藉由偵測心肌組織的都卜勒頻移而求得,此速度為組織 相對於超音波探頭的移動速度,接著進行位於掃描線(Scan line)上兩兩相鄰位置速 度 的 迴 歸 計 算 (Regression calculation) 以 得 到 瞬 時 速 度 梯 度 (The instantaneous gradient of velocity)變化,此即為應變速率(Strain rate),因此再將應變速率積分後 則可得到應變量,圖 2-6 即為一小段心肌壁組織都卜勒速度、應變速率及應變量 變化圖。
圖 2-6 組織都卜勒速度、應變速率及應變量變化圖[15]
然而,此種估計應變的方法會具有下列幾項限制:
(1) 對雜訊非常敏感
採用比較相鄰位置間速度變化的方法,是對雜訊非常敏感的。若要取得理想的 速度估計,則需要避免多重反射假影(Reverberation)以及足夠高的脈衝重覆頻 率(Pulse-repetition frequency)以避免頻譜混疊(aliasing)的現象產生。
(2) 易低估應變量
這項限制是由於我們希望都卜勒影像要達到較高的時間解析度 (Temporal resolution),因此勢必會犧牲影像的空間解析度(Spatial resolution),如此一來在 心臟超音波中,心肌速度訊號容易與相鄰的左心室中血液流速訊號造成混淆,
進一步則增加應變量估計的誤差,使得容易低估應變量。
(3) 只能量測軸向應變量(Angle dependence)
都卜勒頻移的方法只能偵測到軸向的速度分量,但實際上心肌運動的速度是三 維向量,因此在同一條掃描線上,每個心肌速度在軸上投影的分量都不一樣,
因此會導致應變量估計的誤差。
(4) 無法偵測在不同平面間的運動(Through-plane motion)
心肌組織除了伸長和縮短的運動外,還混合了旋轉和扭轉的運動,因此影像上 的取樣範圍其實際的運動型態勢必會偏離掃描的平面,但都卜勒頻移估計速度 的方法只能在一維的超音波掃描線上進行,無法偵測非平面上的運動,因此會 存在顯著的誤差。
(5) 呼吸運動易造成誤差
自然的呼吸運動會影響量測都卜勒頻移時波束(beam)與組織的夾角,使得在量 測過程中量測的角度會不斷的改變,因此造成應變曲線(Strain curve)的漂移的 現象[14]。
2.2.2 斑點追蹤法
斑點追蹤法是一種可偵測多維度運動的方法,在超音波影像中,斑點是組織 中散射子逆散射訊號干涉造成的結果,因此斑點訊號在影像上會隨著組織移動,
且在輕微的運動形變位移下,能夠維持非常相似的性質,故可以利用射頻信號型 態匹配技術(Radio frequent signal pattern-matching technology)定位出組織移動後的 位置[10],再進一步根據與原始位置的距離以及向量變化即可計算出組織應變量,
圖 2-7 即為利用三維斑點追蹤法所產生的心臟超音波應變影像。從斑點追蹤法的 運算原理中能夠看出,定位的方法與超音波入射角度無關且無取樣頻率的限制,
並能夠應用在多維度的運動位移偵測上,因此能夠克服都卜勒頻移估計速度梯度 法中只能量測軸向應變及為避免頻譜混疊使脈衝重覆頻率受限等缺點。
圖 2-7 TOSHIBA 三維斑點追蹤法心臟超音波應變影像
(http://circ.ahajournals.org/cgi/content/meeting_abstract/122/21_MeetingAbstracts/A9205)
不過,利用超音波斑點追蹤法來估算應變量,仍然會有以下兩項主要的限制:
(1) 影像空間解析度與時間解析度取捨的影響
運用斑點追蹤法來估計應變量是需要較高的時間解析度,因為如此可避免物體 運動速度較快時造成的估計誤差,才能夠去分析像心臟如此博動快速的影像。
但是相對的,一旦提高時間解析度空間解析度勢必會降低,則會影響斑點型態 匹配的判定,造成位移估計的正確率下降。
(2) 耗費大量的運算時間
斑點追蹤法因需要逐一去比對每個位置的斑點形態,因此需耗費極大量的運算 時間,這個現象在具有龐大資料量的高維度影像上更為顯著,會造成即時成像 的困難度[14]。
在我們的研究中,我們希望能利用類似於斑點追蹤法運算原理的特徵斑點追 蹤法及具高速成像速率的超音波平面波成像法,來達到一方面保有斑點追蹤法的 優勢,又能同時減少大量運算時間的三維心臟超音波應變影像。
第三章 超音波平面波成像
3.1 高速超音波成像(High frame rate imaging)
在醫用超音波成像系統中,成像速率(frame rate)是取決於每張影像探頭發射波 束的次數。探頭發射一次波束所需要的時間稱為脈衝重覆時間 (Pulse-repetition Time, PRI),因此一張影像成像時所需的探頭發射次數越多,其成像時間越長,成 像速率越慢。若想要提高成像速率,顯而易見的,可採用降低發射次數來達成,
但相對會同時降低了影像品質。目前已經有數種高速成像的方法,其中平面波成 像法能夠得到最高的成像速率,在接下來的內容中,我們將在詳細介紹平面波的 成像原理。
3.1.1 波束形成原理(Beamforming principle)
超音波成像所使用的陣列探頭,可以電子式的調整每個單位元件 (Arrary element)產生脈衝的時間,根據延遲和加成演算法(Delay-and-sum algorithm)形成聚 焦的波束(Focused beam)。利用這樣的方法,可以任意調整聚焦的深度(Beam length) 和波束的方向(Beam direction),形成各式的超音波影像。
在發射時,每一個信號產生器(Pulse generator)產生的脈衝會送入延遲電路(The delay circuitry),使得每一個陣列單元所發出的聲波可以同時到達聚焦點,此時,
聚焦點處的能量會是整個聲場中的最大值,圖 3-1 為發射聚焦波束形成(Transmit beamforming)的示意圖。
在接收時,接收聚焦波束形成(Received beamforming)的原理是與發射時相同 的。當聲波由聚焦點散射回傳至每一個陣列單元接收後,透過延遲電路分別給予 適當的延遲時間加以排列並加總起來,即成為接收聚焦波束,圖 3-2 為發射聚焦波 束形成(Received beamforming)的示意圖。
圖 3-1 發射聚焦波束形成(Transmit beamforming)示意圖
圖 3-2 接收聚焦波束形成(Received beamforming)示意圖
每一個聚焦點在延遲電路中所需要的延遲時間是可以計算出來的。如圖 3-3 所示,相對於以線性探頭中心為原點的聚焦點位於(xp, zp),聚焦點對應於每一個陣 列單元(x. 0)所需要的延遲時間為 ,則延遲時間 即為聚焦點到每一個陣列單 元的距離除以聲場中的聲速,若以極座標表示則運算式如式 3-1 所示。
式 3-1
若假設聚焦點位於超音波聲場中的遠場(Fresnel region)內,則延遲時間函數可以用 拋物線趨近法簡化如下式:
式 3-2
(x,0)
圖 3-3 超音波成像聚焦點與探頭陣列單元座標位置示意圖
在式 3-2 中,第一項 表示為聚焦點到陣列單元間的傳遞時間常數(The constant
propagation time);第二項 是與波束導向(steering process)有關;而第三項
則是為聚焦功能的表示項。從上述中可知,傳遞時間是與波束導向無關,
而波束導向則與聚焦點所在位置無關,而聚焦項則是同時與波束導向和聚焦點的 位置有關,且在遠場處此項將趨近於零。另外,從聚焦項也可以看出波束導向越 顯著時有效孔徑的大小將會減小。
在實際運用時,發射聚焦波束的延遲時間會用相對於探頭陣列中心的延遲時 間來表示,如式 3-3 所示:
式 3-3
相對的,此時接收聚焦波束需要計算包含來回的傳遞時間,因此接收聚焦波束的 延遲時間的運算式調整如下所示:
式 3-4
值得一提的是,發射聚焦波束只能形成單一固定的聚焦點,而接收時則可對 影像上每個位置進行接收聚焦,稱動態接收聚焦,進而達到最佳的影像成像。
3.1.2 聚焦成像(Focused imaging)
在超音波成像中,每張影像是由數個掃描線(Scan line)組合而成,每條掃描線 亦即代表一條波束(beam)。在聚焦成像中,每一條掃描線是由單一個陣列單元發射 而來,再經由發射聚焦及動態接收聚焦後而得,此種影像又稱為雙向聚焦影像 (two-way focused images)。雙向聚焦影像具有良好的空間及對比解析度,不過卻需 要耗費較多的時間來成像,成像速率較低。
圖 3-4 超音波發射聚焦波束影像
(http://www.obgyn.net/ultrasound/ultrasound.asp?page=/us/news_articles /Ultrasound_History/US_history_schleiren)
3.1.3 多重波束傳輸(Multiple beam transmission)
顯而易見的,若能降低發射次數即可使成像速率增加,多重波束傳輸就是據 此發展而來,其原理是結合數個陣列單元,同時發射及接收多條波束。假設原本 需要發射 M 條波束才能成像,若採用同時發射 N 條波束,其成像速率就會增加 N/M 倍。不過這個方法是有代價的,當同時發射多條波束時,多條波束間各自的 旁波瓣(Side lobes)會相互干擾,而使得影像品質降低,目前可以運用合成孔徑 (Apodization)以及編碼波形(coded excitation)等方法來減輕這項干擾的影響[16]。
圖 3-5 同時發射兩條波束的多重傳輸波束影像
(http://www.ntnu.edu/isb/studies/master-thesis-and-project-topics)
3.2 平
面波發射成像(Plane-wave excitation imaging, PWE)平面波發射成像是結合探頭所有的陣列單元同時發射一個無聚焦的平面波,
並進行動態接收聚焦來獲得超音波平面波影像。由此可看出,平面波發射成像法 其發射次數只有一次,是最少的,因此能有最高的成像速率,成像時間只需一個 脈衝重覆時間(PRI),因而此種成像方式能夠減少速度較快的物體其運動假影的產 生,另外也能避免因掃描速度較慢造成的估計誤差。
但同樣的,影像的品質和成像速率是需要相互取捨的。平面波成像是由發射 無聚焦平面波所形成,因此與傳統的雙向聚焦影像(Two-way focused image)相較起 來,平面波影像的空間解析度、對比解析度和訊雜比(SNR)都會較低。不過,平面 波影像極高的時間解析度能夠保持移動前後影像間斑點的高度相關性,應用在斑 點追蹤上時能夠得到更為正確的位移估計,此項優勢亦是本研究的重要依據。
圖 3-6 (a) 超音波平面波發射成像示意圖 (b) 模擬之二維超音波平面波影像
(a) (b)
本研究的研究假說是認為對心臟進行三維超音波平面波掃描,並在此影像上 運用特徵斑點追蹤法能夠建立即時的三維心臟應變量影像。要能建立起「即時」
的平面波影像其最主要的理由就是需使用高成像速率的掃描方式,雖然一般來說 在二維影像中,根據不同的掃描範圍和深度成像速率需要 50Hz 以上[19],而三維 影像因為有更多的空間資訊可能所需的成像速率可略低於二維影像約 25~30Hz,
但若要達到「即時」成像的標準,仍需要高於 30Hz 以上的成像速率,而平面波掃 描的方式是最為可行的。另一方面,雖然平面波掃描會使影像空間解析度降低,
但在本實驗室先前的研究中比較平面波影像與雙向聚焦影像之 PSF 發現,平面波 影像與雙向聚焦影像的軸向空間解析度(axial resolution)差異不大,在橫向空間解析 度方面(lateral resolution),雙向聚焦影像較平面波影像高出 0.2 至 1 倍[17],但我們 認為如此影像解析度的差異並不會對斑點追蹤的結果造成顯著性的影響。根據上 述的推論,我們認為本研究的假說成立與否,平面波影像佔了很重要的角色。
第四章 超音波影像斑點追蹤演算法
4.1 斑點特性與在動態追蹤上的應用
在介紹斑點追蹤演算法之前,我們要先瞭解超音波影像斑點的特性。當物體 大小比超音波波長短時,物體遇到超音波就會往四面八方產生散射訊號,而與超 音波入射方向相反的散射訊號稱為逆散射訊號(Backscattering),是構成超音波影像 的主要信號,而產生散射的該物體我們稱為散射子。受限於超音波系統的限制,
超音波系統中會有一定大小取樣體積,在這個取樣體積中,通常包含了數十個以 上的散射子,這些散射子是沒有辦法進一步分離解析的,且這些眾多的散射子呈 隨機分佈狀態,其逆散射、反射信號的強度、相位會隨各自與探頭表面間的距離 而有所不同,這些信號經相加後,便會產生建設性與破壞性干涉,使得每個取樣 體 積 所 反 應 出 的 信 號 為 一 強 度 不 定 的 信 號 , 此 信 號 經 振 幅 偵 測 (Amplitude Detection),並取波包後(Envelope),再加上隨機之振幅大小,便形成超音波影像上 具亮度變化之斑點圖形[1],[12],[17]。下圖為超音波影像斑點形成示意圖:
圖 4-1 超音波影像斑點形成示意圖[13]
由上述介紹可知,超音波影像斑點的成因是來自於系統的限制,與受測物體 特性無關,因此並不代表著受測物體本身之任何資訊,在早期超音波影像處理中,
皆視之為雜訊,欲去之而後快。然而,同樣的也因為斑點只受到超音波系統限制 的特性,使超音波影像斑點在同樣的系統條件下會有相同的形態,且由於人體組 織是由許多微小的散射子所構成,因此斑點會位於人體組織所在位置上並隨著組 織移動,如此一來,我們便能夠以追蹤斑點的方式來探究組織的運動型態。更進 一步的說,在人體組織的運動位移不大,且超音波系統能夠提供夠快的成像速率 的前提下,我們可假設超音波動態影像上的斑點形態是極為相似的,因此進行斑 點追蹤法來分析人體組織的運動型態是可行的。
4.2 斑點追蹤演算法
斑點追蹤演算法是結合了斑點形態搜尋(Pattern searching)和匹配(matching)的 演算法,可分為設定參數(Set parameters)、相似性搜尋(Correlation search)以及後運 算處理(Post calculation)三個部分,將詳細介紹如下:
(1)參數設定(Set parameters)
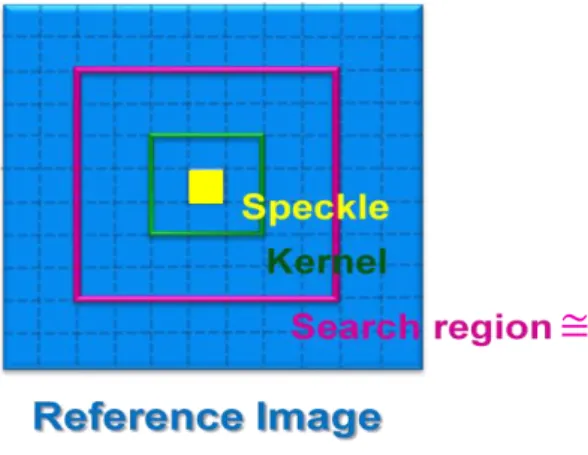
首先需要先設定一個以斑點為中心適當的內核範圍(kernel size)和搜尋範圍 (Search region)。內核範圍內需要有此斑點足夠的形態資訊,以及與相鄰位置斑點 間的相對資訊。而搜尋範圍的設定,則是需要考慮此斑點可能移動的範圍,可以 根據能夠偵測的最大速度(Maxium detectable velocity, vmax)和成像時間(frame time, dt)來決定。
圖 4-2 斑點追蹤內核與搜尋範圍設定示意圖
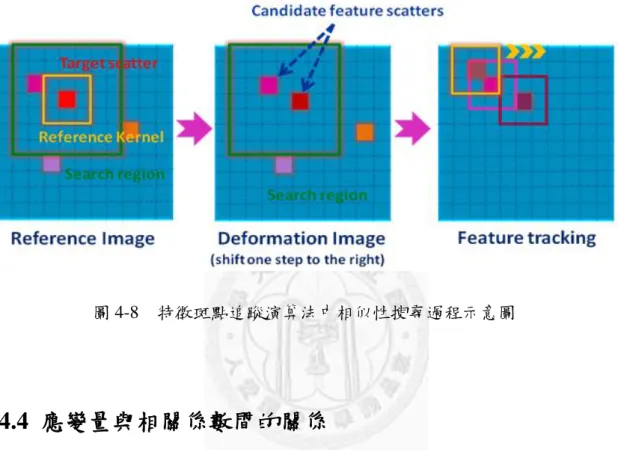
(2) 相似性搜尋(Correlation search)
在形變後影像(Deformed image)中,設定同樣位置大小的搜尋範圍,將原始影 像中的內核範圍放入形變後影像搜尋範圍內,利用標準化的交叉相關法(normalized cross-correlation method)逐一進行形態匹配相似度的運算。當搜尋範圍內所有的位 置匹配完之後,其中相似度最大值所在位置處,我們認定為原斑點在形變後影像 上的位置。下圖即為相似性搜尋過程示意圖
在此過程中,最重要的是相似度的運算,我們採用標準化的交叉相關法來估 計不同位置斑點形態間的相關性。採用標準化的交叉相關法的原理是根據影像上 每個斑點都有不同的形態分佈,因此會有不同的射頻訊號形態 (Radio frequent
vmax · dt
圖 4-3 斑點追蹤相似性搜尋過程示意圖
signal pattern),如圖4-4所示,假設有兩種具不同射頻訊號形態的散射子分別位於 x1, y1,經由形變後分別位於x2, y2,我們將原始的射頻訊號對形變後的射頻訊號沿 著座標軸上每個位置逐一移動(shift)並進行相乘相加的運算,此即為標準化的交叉 相關法的運算原理,在三維空間裡其運算式如式4-1所示。在每個位置上的運算結 果即為在每個位置時匹配的相關係數值,相關係數值越高代表兩者相似性越高,
顯而易見的,當兩者形態完全吻合時會有最大的相關係數值,此時所在位置即為 位移後所在位置。
圖 4-4 不同散射子其射頻訊號經位移後相對位置變化示意圖
RFA 為 A 散射子的射頻訊號形態起始位置 x1,形變後位置 x2 RFB 為 B 散射子的射頻訊號形態起始位置 y1,形變後位置 y2 L1, L2 分別為 A, B 兩散射子原始和位移後的相對距離[10]
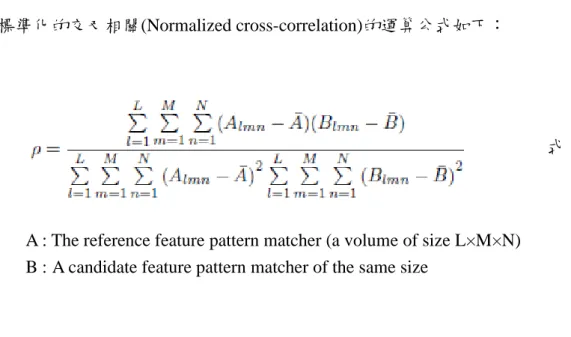
三維標準化的交叉相關(Normalized cross-correlation)的運算公式如下:
式 4-1
(3) 後運算處理(Post calculation)
將經步驟(2)相似性搜尋後所估計形變後的位置,與該斑點在原始影像中的起 始位置進行向量的運算,能計算出形變前後的位移,若在加入成像時間(frame time) 的參數,可求出速度向量;另外,若考慮兩個不同斑點間相對的形變量,根據前 文第二章所述,可以估計出兩個斑點間的應變量。
A : The reference feature pattern matcher (a volume of size L×M×N) B : A candidate feature pattern matcher of the same size
圖 4-5 斑點追蹤後運算處理位移向量示意圖
4.3 特徵斑點追蹤演算法
在先前所介紹的斑點追蹤法主要是採用標準化交叉相關運算在搜尋範圍內逐 一的搜尋匹配,顯然必定會耗費大量的運算資源。如果要偵測較高的速度,勢必 要增加搜尋的範圍,但如此一來其運算的負荷量及複雜度會以非線性增加,這個 缺點在超音波高維度成像中偵測運動物體 (如三維超音波動態影像)和即時成像上 是很大的阻礙。有很多的研究方法都希望可以減少搜尋時間,特徵追蹤法便是其 中之一。
特徵追蹤法早期是應用在偵測血液流動及組織運動,能有效的降低運算量。
在1911年,Roundhill首先提出擷取偵測的斑點訊號的振幅大小作為特徵,並成功 的追蹤它來量測軸向流速(axial flow)。之所以特徵追蹤法能夠顯著的降低運算量,
主要是其演算法有別於斑點追蹤法在搜尋範圍內逐一匹配比對的做法,而是在進 行追蹤匹配之前優先辨識影像中顯著的特徵,選擇性的擷取容易辨識的斑點訊號 部位,讓所需要進行追蹤匹配的斑點數目降低,因此能大量的減少處理的資料量,
使運算複雜度降低,偵測速度加快。
由上述可知,特徵追蹤法的演算法步驟與斑點追蹤法幾乎雷同,仍然包括參 數設定、相似性搜尋和後運算處理,不過最重要的是所有步驟之前之前需先在原 始及形變後的影像上進行特徵的判定。特徵判定的方法是進行局部振幅最大值的 篩選,步驟如下:
(1) 設定域值(Threshold, Hth)
域值的設定是依據整張影像的平均值及標準差的線性組合來設定,其公式如下,
Hth為域值,μA為影像的平均值,σA為影像的標準差,C 為常數:
式 4-2
(2) 分別在形變前後的影像中的每條 A-line 上取出斑點訊號振幅大於域值的斑點 特徵形態。
(3) 接著去掉所取出的斑點特徵形態訊號寬度最大及最小者,其餘保留下來。
(4) 將保留下來的斑點特徵,各自以其中心位置延伸出一個內核範圍(kernel region),
若在此內核範圍內其振幅為最大值者則保留下來,即為所篩選出的特徵斑點形 態(feature pattern);相反的,若並非此內核範圍內振幅為最大值者,則淘汰。
圖 4-7 特徵追蹤法演算法中特徵形態(Feature pattern)擷取示意圖
特徵追蹤法在特徵形態擷取的步驟完成後,仍同樣進行參數設定、相似性搜 尋和後運算處理,所不同的是,這些步驟僅僅只針對所擷取的特徵形態來進行運 算。由於這些步驟的原理及方法與斑點追蹤法完全一致,在此不再贅述。如下圖 為特徵斑點追蹤演算法相似性搜尋過程的示意圖:
4.4 應變量與相關係數間的關係
不論是傳統的斑點追蹤演算法或是特徵追蹤演算法中,相似性搜尋匹配的過程 是判定斑點位移後位置的重要步驟,決定了追蹤的正確性,而相關係數則是其中 最主要的依據。在心臟複合式的運動模式中,休息狀態下,心室軸縮短率大於 25%,
心肌旋轉的最大角度約為 13°,從 J. Meunier (1997) [22]對 3D echographic speckle tracking 的數值模擬研究中可以看到使用 1.5MHz 的探頭,在旋轉角度小於 10°及 形變量小於 35%的情況下可以有大於 0.6 以上的相關係數,如圖 4-9 所示:
圖 4-8 特徵斑點追蹤演算法中相似性搜尋過程示意圖
但以上的結果是模擬在心肌組織沒有被擠壓(Compression)的條件下,如果考 慮心肌被擠壓的狀況,心肌組織上的相鄰兩點斑點訊號常會因形變而位移更為接 近不易辨識,使得形變後的斑點訊號形態相較於原始影像有較大的差異,因此會 造成在相似性匹配時相關係數的降低(decorrelation)。在 T. Varghese 和 J. Ophir 評估 軸向一維的組織應變量與相關係數間的關係研究中[23]可以發現,當形變量越大時,
相關係數的變異性就越大(請見圖 4-10),且應變量估計的標準差與乖離率(Bias)也 越大,如圖 4-11 中完美理想的實際施加應變量與估計應變量的對應曲線為實線 ( )、由理論上推算而來的實際施加應變量與估計應變量的對應曲線為 、 而經由模擬而得到的施加應變量與估計應變量的對應曲線為× ×,可以明顯的看 出當模擬中施加的應變量越大,所估計的應變量標準差越大;再由圖 4-12 可看到,
與圖 4-11 同樣的圖示法,當施加的應變量越大時,經由模擬(× ×)或理論( ) 推算所得到應變量估計乖離率皆越大,且模擬所得到的應變量估計乖離率與理論 所推算的應變量估計乖離率之間的差異越大。上述圖 4-11 與圖 4-12 的結果表示 當應變量越大時量測的再現性(Repeatability)較差,其估計結果較不易被接受。
圖 4-9 三維心臟超音波模擬影像之不同旋轉角度及形變率相關係數變化圖[22]
圖 4-10 一維實際施加應變量與相關係數變異性關係圖[23]
圖 4-11 一維實際施加應變量與估計應變量關係圖[23]
:理想的實際施加應變量與估計應變量對應曲線
:由理論推算出的實際施加應變量與估計應變量對應曲線 ×:經由模擬所得到的實際施加應變量與估計應變量對應曲線
這種因擠壓而造成形變前後斑點間相關係數降低的問題,在 J. Ophir、S. K.
Alam 和 T. Varghese 等人的研究中[24][25]提出了時間延展(Temporal stretching)的 方法來加以克服。 J. Ophir 等學者假設在軸向一維壓縮前後的聲波訊號分別為 r1(t)、
r2(t),如式 4-3、式 4-4 所示:
式 4-3 式 4-4
而將經擠壓後的訊號 r2(t)進行時間延展而得到延展後的訊號 r3(t),如式 4-5 所示:
式 4-5 在式 4-3 ~式 4-5 中,s1(t)、s2(t)、s3(t)分別表示了壓縮前後與時間延展三種情況下 的散射子分佈函數,n1(t)、n2(t)、n3(t)則分別為其對應的雜訊分佈函數,而 p(t)為 超音波系統的脈衝響應(Impulse response);在式 4-4 中,a 為時間延展因子, 為施 加的應變量,一般而言,在應變影像中 。由上面的式子可以看出,經時間
圖 4-12 一維實際施加應變量與應變量估計乖離率之關係圖[23]
:由理論推算出的實際施加應變量與應變量估計乖離率對應曲線 ×:經由模擬所得到的實際施加應變量與應變量估計乖離率對應曲線
延展的訊號 r3(t)較原始訊號 r1(t)具有簡單的散色子位移情形,不過其系統頻率響應 也有了時間延展的效應。在他們的時間延展理論推導中證明了將擠壓後的訊號進 行時間延展的結果相當於將擠壓前訊號的自相關函數(Autocorrelation function)經 低通濾波(Low-pass filter)的結果,且由式 4-6 可以看出,時間延展的效應幾乎能抵 銷了因擠壓影變造成組織斑點訊號相關性降低的結果:
式 4-6 G13:cross-spectral density function
G11:auto-spectral density function
因此證明了應用時間延展法於擠壓後形變訊號能夠有效的提高與原始訊號間的相 關性。J. Ophir 等人根據上述推論結果應用於模擬與仿體實驗上,也獲得了良好的 驗證,圖 4-13 為模擬不同應變量下分別不採用及採用時間延展法的相關係數對應 圖,而圖 4-14 則為在軸向擠壓均質仿體實驗中採用時間延展法前後的相關係數對 應圖,由這兩項研究結果可以發現,對擠壓後的斑點訊號採用時間延展法確實能 提高與原始訊號間的相關係數,進而有利於斑點追蹤的應用。
圖 4-13 模擬在不同應變量情況下使用與不使用時間延展法之相關係數比較
(a) (b)
上述學者們的研究結果,雖然只是在一維空間的探討,但我們可以推論在三 維空間中,心肌組織擠壓後的斑點訊號形變的狀況仍然存在,且又增加了橫向 (Lateral)與探頭厚度平行方向(Elevational)的變異性,使得形變前後相關性的比較更 為複雜。不過,我們仍認為在三維心肌應變影像中可利用時間延展法在形變後影 像中的每一條 A-line 上,應用於 4.3 節所述特徵斑點追蹤法中特徵斑點篩選及相似 性匹配比較步驟之前,來達到提高形變前後斑點訊號間的相關係數,增進特徵斑 點追蹤的正確率,當然,這個部份需要將來進一步的探討和驗證。
圖 4-14 在軸向擠壓均質仿體實驗中採用時間延展法前後的 相關係數對應圖
: 採用時間延展法前之相關係數對應曲線 × : 採用時間延展法後之相關係數對應曲線[24]
第五章 斑點追蹤法於三維心臟超音波影像之應用
5.1 應用於模擬之三維平面波影像 5.1.1 模擬方法
本研究在模擬方面是應用 field II 超音波模擬程式,模擬使用矩陣探頭(matrix array probe)發射平面波並進行旋轉式掃描(Rotational scan,如圖 5-1)和接收動態聚 焦後得到的三維超音波平面波影像,而所掃描的物體是內徑為 4.8mm 空心圓球用 以模擬心臟左心室,散射子則以每單位表面積具 30 個散射子為基準,隨機分佈於 空心圓球球殼上(如圖 5-2)。使用的各項參數設定請見表 5-1,而圖 5-3 則為根據 設定的參數使用 field II 超音波模擬程式所模擬之陣列探頭示意圖。
值得一提的是,本研究所採用的旋轉式掃描方式有別於一般使用扇形掃描方 式之最大的優點在於旋轉式掃描所得到的資料矩陣具有接續不斷的特性。舉例來 說,若旋轉式掃描是以一扇形掃描面以 dphi = 5 度之旋轉角度由 phi = 0 度到 phi = 175 度進行旋轉,則 phi=175 度的下一筆扇形掃描資料則等同於 phi = 0 度時的扇 形掃描資料,同樣的,phi = 0 的前一筆扇形掃描資料則等同於 phi = 175 度時的扇 形掃描資料。如此的掃描特性可以在進行斑點追蹤相似性匹配時,減少搜尋範圍 一個維度(旋轉方向)的限制,並提高斑點追蹤的正確性。
R theta
phi
表 5-1 模擬三維平面波影像設定之參數 Simulation Parameters
Transducer Received Beamforming
Elements 45*45 Theta range* -36°~36°
Center frequency 1.5 MHz Phi range* 0°~180°
Sampling frequency 20MHz dtheta* 1.27°
Speed of sound 1540 m/s dphi* 5°
lambda 1 mm dR 0.04 mm
Weight of elements 0.4 mm f number 1.5 Height of elements 0.4 mm z-direction displacement 1.8 mm Pitch 0.5 mm
Kerf 0.1 mm
* theta 是指波束與 z 軸的夾角,而 phi 則是指波束與 x 軸的夾角。由 Theta range 與 Phi range 所建 構出來的三角錐體範圍則為波束的掃描範圍,而 dtheta、dphi 則是波束之間的間隔。
圖 5-2 模擬之雙層空心圓球上散射子的分佈位置 (a) 所有散射子之立體空間分佈
(b) x-y 平面上的散射子分佈
(a) (b)
-5
0
5
-5 0
5 30 32 34 36 38 40
x axis (mm) scatterers coordinates
y axis (mm)
z axis (mm)
-4 -2
0 2
4
-4 -2 0 2 4 30 30.5 31 31.5 32 32.5
z axis (mm)
scatterers coordinates for one slice
x axis (mm) y axis (mm)
35
-10
-5
0
5
10
-10
-5
0
5
10 -1
0 1
z (mm)
y (mm) x (mm)
圖 5-3 運用 field II 模擬之陣列探頭示意圖
-10 -8 -6 -4 -2 0 2 4 6 8 10
y (m m )
kerf
Pitch
-10 -8 -6 -4 -2 0 2 4 6 8 10
y (m m )
Weight
Height
Kerf
5.1.2 平面波影像和雙向聚焦影像進行傳統斑點追蹤法的比較
平面波影像是發射一個無聚焦的平面波,只有在接收時進行動態聚焦;而雙 向聚焦影像,顧名思義,是在發射及接收時都進行聚焦,因此雙向聚焦的空間解 析度會比平面波影像高。在本實驗室吳詵穎學姐 2009 年的研究中發現,平面波影 像與雙向聚焦影像的軸向空間解析度(axial resolution)差異不大,但在橫向空間解析 度方面(lateral resolution),雙向聚焦影像較平面波影像高出 0.2 至 1 倍,且平面波 影像的 SNR 也較大,這些都會影響進行斑點追蹤時的正確性。但由於雙向聚焦影 像進行發射聚焦時,需發射多次才能形成一張影像,勢必其時間解析度會較只發 射一次的平面波影像降低許多,且成像速率也會降低,不但耗時也不利於位移較 大的運動型態追蹤。
為了探討在三維平面波影像與雙向聚焦影像上進行斑點追蹤效果的差異,我 們利用 field II 超音波模擬程式,在同樣的設定參數下,模擬出三維平面波影像及 三維雙向聚焦影像(圖 5-4),其物體運動型態皆設定為沿著軸向向下位移 1.8m,之 後再分別進行傳統斑點追蹤對影像進行分析,其分析結果如下:
(1) 平面波影樣與雙向聚焦影像的影像差異
(a) (b)
圖 5-4 field II 模擬之(a)三維平面波 xz 平面影像 (b)三維雙向聚焦 xz 平面影像
從影像中我們可以發現平面波影像中,因為發射沒有聚焦,因此旁辦(side lobe)的影響非常明顯,使得影像非常模糊,而雙向聚焦影像則明顯清晰許多。
(2) 相關係數的分佈
圖 5-5 平面波影像與雙向聚焦影像軸向位移相關係數分佈圖
0 0 0 0 0 0 0 0 0 1.78
98.22
2.96
97.04
0 20 40 60 80 100 120
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
propotion in number (%)
correlation coeffecien
Speckle tracking correlation coeffecient distribution _axial displacement
PWE image Two-way focus image
圖 5-6 平面波影像與雙向聚焦影像橫向位移相關係數分佈圖
由圖 5-5, 圖 5-6 可看出平面波影像與雙向聚焦影像相關係數在軸向位移上 皆是大於 0.9 以上分佈,且兩者的相關係數分佈分非常接近;但在橫向位移上兩者 的相關係數皆顯著的降低,且平面波影像的相關係數較雙向聚焦影像差些。
(3) 斑點追蹤錯誤率的分佈
圖 5-7 及圖 5-8 分別是平面波影像和雙向聚焦影像在軸向及橫向位移上的斑 點追蹤錯誤率分佈圖。在軸向位移方面,平面波影像在錯誤率較低的分群上擁有 較多的斑點數目百分比,且其絕對平均百分率為 0.85 亦低於雙像聚焦影像絕對平 均百分率的 1.04。與我們預期平面波影像追蹤錯誤率會較雙向聚焦影像來的差的 結果相反,推測主要原因是我們是沿著軸向位移來比較,而根據先前研究顯示,
平面波影像與雙像聚焦影像的軸向解析度是很接近的[17],因此很可能在軸向上的 追蹤結果也會很接近。再者,我們發現在影像上雙向聚焦影像的斑點特徵有明顯 的變化,而平面波影像則影像較為模糊反而看不出顯著變化(請見圖 5-9),因此推 測如此亦為雙向聚焦影像相關係數較低,追蹤誤差較大的原因。
另外,在橫向位移方面,就如我們所預期,雙向聚焦影像的追蹤誤差較平面 波影像小,雖然由圖 5-8 中所顯示的誤差分群差距不大,但在絕對平均誤差值上,
雙向聚焦影像 64.79 比平面波影像 71.09 就有顯著的差距。這個現象,亦可以根據 先前研究中所提平面波影像較雙像聚焦影像的橫向解析度差 0.2~1 倍左右來推論,
這很可能是肇因於平面波影像無聚焦效應,在橫向位移前後斑點形態間的相關性 降低的程度較雙向聚焦影像大,造成追蹤誤差變大。
圖 5-7 平面波影像與雙向聚焦影像軸向位移斑點追蹤錯誤率分佈圖
20.62 47.38
0 4.78
18.49 8.54
0 0 0.16 0.03 0.00 13.44
33.15
6.94 17.01 13.63
0.86 0.93 0.23 0
10 20 30 40 50
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
propotion in number (%)
tracking error percentage (%)
Percentage distribution of z direction speckle traking error _axial displacement
PWE image Two-way focus image
圖 5-8 平面波影像與雙向聚焦影像橫向位移斑點追蹤錯誤率分佈圖
圖 5-9 平面波影像與雙向聚焦影像軸向位移前後的影像
位移方向為沿著 z 方向向下位移 0.18mm (紅色箭頭為看 得出斑點形態有變化之處)
(a) 縱向位移前雙向聚焦影像 (b) 縱向位移後雙向聚焦影像 (c) 縱向位移前平面波影像 (d) 縱向位移後平面波影像
(c) (d)
(a) (b)
5.1.3 在極坐標系和直角坐標系下進行傳統斑點追蹤法的比較
在本研究中不論是斑點追蹤法或特徵追蹤法都是在極座標系下進行,這主要 是我們認為實際在臨床進行心臟超音波掃描大多是使用相位陣列探頭(phased array probe),二維波束的掃描範圍形態為扇形,三維則似三角圓椎形,且波束的振幅、
相位是沿著相位陣列探頭放射狀發射的方向上在變化,另外心臟的運動型態大部 分是具有旋轉及扭轉的形變,因此基於上述的理由,我們預期直接在極座標系上 進行斑點追蹤的結果應該會較在經過掃描轉換(scan conversion)後的直角座標系上 斑點追蹤的結果來的精確,而且可免去掃描轉換所需要的運算量。
為了確認我們的推論是否正確,我們利用同一筆模擬資料,分別在直角座標 系與極座標系上進行傳統的斑點追蹤分析,分析結果如下:
(1) 在極座標系上與直角座標系上影像的差異
圖 5-10 field II 模擬之(a)三維平面波影像在極座標系 phi=0 的剖面 (b)三維平面波影像在直角座標系 xz 平面的影像
(a) (b)
取樣體積(sampling volume)大小。直角座標系的網格會較極座標系的網格大些,因 此影像看起來會較粗糙。
(2) 相關係數的分佈
下圖是將兩種座標系的平面波影像進行斑點追蹤後相關係數的分佈狀況。由圖 中可發現在直角座標系中位移前後斑點形態的相關係數較低。
(3) 斑點追蹤錯誤率的分佈
下圖則為在兩種座標系進行斑點追蹤的錯誤率,可以很明顯的看出在直角座 標系中追蹤誤差明顯增加許多。我們認為因為直角座標系的網格較大,解析度較 差,因此進行斑點追蹤時的錯誤率會增加。這項結果部分證實了我們在前面的推 論,但進一步探討可以發現,影像在極座標系中或者在直角座標系中進行斑點追 蹤的有效性,實際上是根據掃描轉換的細緻程度,在此例中,如果直角座標系經 極座標轉換後其單元體積較原本極座標系中的單元體積小,可以推測直角座標系 的影像會較目前細緻許多,進行斑點中追蹤的效果上必然會較接近極座標系追蹤 的結果。不過,我們仍認為極座標系還是具有能夠較為貼近掃描形態和運動型態 之不可取代的優勢。
圖 5-11 分別在極座標系與直角座標系進行斑點追蹤的相關係數分佈圖
0 0 0 0 0 0 0 0 1.78
98.22
0 0 0 0 0 0 0 3.23
25.90
64.87
6.00 0
20 40 60 80 100 120
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
proportion in number (%)
correlation coefficient
Speckle tracking correlation coefficient distribution
polar coordinate cartesian coordinate
5.1.4 特徵追蹤法與傳統斑點追蹤法的比較
特徵追蹤法是由傳統的斑點追蹤法演變而來的,藉由只追蹤經篩選過的特定 斑點形態來降低處理的資料量及增進運算效能。為了探討特徵追蹤法與傳統斑點 追蹤法的差異,我們設定 5 組具有相同軸向位移但不同大小資料量的三維平面波 影像以及 5 組具相同資料量但不同旋轉角度的三維平面波影像,分別進行特徵追 蹤法與傳統斑點追蹤法進行比較。
5.1.4.1 不同資料量
(1) 資料量大小
將原始資料量設計成 5 組經不同減少取樣(downsampling)後的三維平面波影 像資料量,各組所採用減少取樣的倍數如下表 5-2 所示:
圖 5-12 分別在極座標系與直角座標系進行斑點追蹤的錯誤率分佈圖
20.62 47.38
4.78 18.49
8.54 0.16 0.03 0
99.90
0 20 40 60 80 100
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22
propotion in number (%)
tracking error percentage (%)
Percentage distribution of z direction feature traking error _ kernel 5lambda
polar cartesian



![圖 2-2 局部心臟座標系統[11] 2.1.1 徑向應變(Radial strain) 在同一心肌短軸面上,同一徑向上心內膜及心外膜相對應的位置其原始距離 為 L0 i ,經形變位移後的相對距離為 Lf i ,Lf i 在原徑向上的投影量為 Lf i R,如圖 2-3 所示: L0 i :原始相對距離 Lf i :位移後相對距離 Radial : 徑向 Circumferential : 環向 Longitudinal : 縱向](https://thumb-ap.123doks.com/thumbv2/9libinfo/9600478.628838/19.892.124.758.118.1041/局部心臟座標系統徑向應變Radial在同一心肌短軸面上同一徑向上心內.webp)
![圖 2-6 組織都卜勒速度、應變速率及應變量變化圖[15]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9600478.628838/22.892.191.679.481.1029/圖26組織都卜勒速度應變速率及應變量變化圖15.webp)
![圖 4-11 一維實際施加應變量與估計應變量關係圖[23]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9600478.628838/43.892.199.660.524.851/圖411一維實際施加應變量與估計應變量關係圖23.webp)
