M(SD);
*p
h:高度有顯著差異;†p
g:組別有顯著差異
第肆章、結果與討論
經由實驗與結果分析後,本研究結果主要可分為(一)跨越不同障礙高度 之步態時間與距離參數特性;(二)不同高度跨越步態之單腳支撐期對身體重 心平衡的影響;(三)不同高度跨越步態對產生制動與推蹬反作用力之影響;
(四)不同高度跨越步態之跟隨腳下肢肌群肌電訊號特性;(五)綜合討論等五 節表述。
第一節、跨越不同障礙高度之步態時間與距離參數特性
(一)跨越不同障礙高度與步態速度、步幅長度的關係
表 4-1 顯示,老年組與年輕組在跨越不同障礙高度時,其步態速度與步 幅長度之變化結果。
表 4-1:不同障礙高度之跨越步態速度與步幅長度
障礙高度 無高度(F) 低高度(L) 中高度(M) 高高度(H) P 值
老年組 年輕組 老年組 年輕組 老年組 年輕組 老年組 年輕組 步態速度(m/s) 0.96
(0.16)
1.16†
*(0.10)
0.67 (0.15)
0.86†
*(0.15)
0.56 (0.15)
0.73†
*(0.16)
0.47 (0.14)
0.69†
(0.09)
P
h<.001
*P
g=.003†
步幅長度 (%身高)
72.22 (7.61)
75.47
*(3.90)
64.26 (3.80)
62.24 (4.78)
63.24 (2.86)
63.13 (4.11)
60.73 (6.74)
64.02 (4.56)
P
h<.001
*P
g=.522
老 年 組 與 年 輕 組 組 內 之 步 態 速 度 隨 著 障 礙 高 度 提 升 而 顯 著 下 降 (H<M<L<F),且老年組與年輕組在組間具有顯著差異(年>老)。就步幅長度 而言,老年組與年輕組在不同障礙高度下,組內達顯著差異(F>L,F>M,
F>H),但兩組間並無差異。
老年組與年輕組在跨越不同障礙高度之步態速度、步幅長度的關係分 別如圖 4-1 與圖 4-2 所示。老年組的步速與步幅隨障礙高度增加而下降;而 年輕組的步速隨障礙高度增加而下降,但步幅長度在中高度與高高度障礙 情境下卻有較低高度障礙情境增加的趨勢。
F L M H
0.4 0.5 0.6 0.7 0.8 0.9 1.0
步態速度 步幅長度
障礙高度
步態速度(m/s)
60 62 64 66 68 70 72 74
步幅長度(%BH)
F L M H
0.7 0.8 0.9 1.0 1.1 1.2
步態速度 步幅長度
障礙高度
步態速度(m/s)
62 64 66 68 70 72 74 76
步幅長度(%BH)
就跨越不同障礙高度下步態速度與步幅長度的調整而言,Hahn, and Chou (2004) 等學者曾以各十三名老年與年輕受試者跨越身高的 0%、
2.5%、5%、10%及 15%障礙高度時,紀錄其跨越步態。結果認為在跨越較 高的障礙高度下,所有受試者會降低步態速度且增加步幅長度,來通過較 高的障礙物。然而這與本研究的結果不盡相同,雖然在跨越步態速度上,
本研究受試者皆呈現隨高度增加而下降,且老年組較年輕組於任一高度情 境下,跨越步態速度下降程度更大。但在調整跨越步幅長度上,年輕組在 各種障礙高度情境下,步幅皆小於無障礙高度情境,但面對中、高障礙高 度情境時,會調整步幅長度大於低障礙高度。年輕組受試者會有這種步幅 長度的調整,可以解釋為年輕人較老年人在面對中、高障礙情境時,支撐
圖 4-1:老年組跨越不同高度障礙物之 步態速度與步幅長度關係圖
圖 4-2:年輕組跨越不同高度障礙物之
步態速度與步幅長度關係圖
腳有較好的肌力基礎或下肢穩定平衡能力,而跨越腳則在身體前傾時能伸 展較多擺動步幅;至於老年組則採取更謹慎的方式來減少步幅長度,使跨 越腳順利越過障礙物而避免絆倒的風險。
(二)跨越不同障礙高度對不同跨越腳之最大足尖速度影響
表 4-2 顯示老年組先行腳與跟隨腳跨越時期最大足尖速度。
表 4-2:老年組先行腳與跟隨腳跨越時期最大足尖速度
低高度(L) 中高度(M) 高高度(H) P 值 先行腳跨越期最大足尖速度(m/s) 2.81 (0.54) 2.76 (0.49) 2.96 (0.56) p
l=.008†
跟隨腳跨越期最大足尖速度(m/s) 3.16 (0.36)† 3.21 (0.51)† 3.08 (0.39)† p
h=.873
老年組在跨越不同高度障礙物時,跟隨腳最大足尖速度顯著高於先行 腳,即後跨越腳足尖速度大於前跨越腳足尖速度;但雙腳之最大足尖速度 並未隨障礙高度增加而有顯著不同。
M(SD);†p
l:兩腳有顯著差異;
*p
h:高度有顯著差異
表 4-3 顯示年輕組先行腳與跟隨腳跨越時期最大足尖速度。
表 4-3:年輕組先行腳與跟隨腳跨越時期最大足尖速度
低高度(L) 中高度(M) 高高度(H) P 值 先行腳跨越期最大足尖速度(m/s) 3.18(0.48) 3.28(0.35) 3.55(0.47) p
l=.047†
跟隨腳跨越期最大足尖速度(m/s) 3.41(0.46)†
*3.60(0.37)†
*3.72(0.46)†
*p
h=.004
*年輕組在跨越不同高度障礙物時,其結果與老年組相同,皆是跟隨腳 最大足尖速度顯著高於先行腳,且其雙腳之最大足尖速度隨障礙高度增加 而有顯著上升。
由表 4-2 與表 4-3 的結果顯示,老年組與年輕組受試者在跨越不同障礙 高度時,跟隨腳腳尖的最大跨越速度皆大於先行腳,且年輕組在障礙高度 增加時,雙腳腳尖的最大跨越速度亦隨之增加。對於這種現象可歸因為:(1) 所有受試者跨越不同高度障礙物時,先行腳在視覺引導下具有警示作用,
因此跨越期採用較慢速度謹慎地通過障礙物;隨後跟隨腳在跨越期由於視 線已非關注於障礙物上,因此視覺警示作用減少;(2)先行腳於跨越動作末 期對身體重心速度的提升間接影響跟隨腳跨越時的重心速度;(3)跟隨腳跨 越期身體重心向前傾斜移動後,接著向前行走的後續動作。這些因素將導 致跟隨腳在跨越期間腳尖的最大速度大於先行腳;此現象對老年組尤須特 別注意,因為在缺乏視覺警示作用下,跟隨腳較快的跨越速度,很可能與 跨越高度不成比例,而導致絆倒危機。
M(SD);†p
l:兩腳有顯著差異;
*p
h:高度有顯著差異
M(SD);
*p
h:高度有顯著差異;†p
g:組別有顯著差異;height*age
*:交互作用有顯著差異
(三)跨越不同障礙高度之步態時間分配
表 4-4 列出老年組與年輕組在不同障礙高度下,跨越步態時間之分配。
表 4-4:不同障礙高度之跨越步態時間分配
障礙高度 無高度(F) 低高度(L) 中高度(M) 高高度(H) P 值
老年組 年輕組 老年組 年輕組 老年組 年輕組 老年組 年輕組 步態時間(s) 1.36
(0.26)
1.17†
(0.10)
1.63 (0.32)
1.29†
*(0.16)
2.01 (0.65)
1.52†
*(0.20)
2.35 (0.77)
1.62†
*(0.23)
height*age
*P=.015
*第 一 次 雙 腳 支 撐期
(%步態時間)
14.87 (1.06)
15.69
*(1.47)
13.40 (3.73)
12.06
*(1.87)
11.37 (5.66)
9.54 (1.58)
12.47 (7.05)
8.93 (1.75)
P
h=.008
*P
g=.374
跟 隨 腳 單 腳 支 撐期
(%步態時間)
35.17 (2.12)
33.87
*(2.13)
40.35 (4.09)
39.30
*(2.21)
44.00 (2.51)
41.62 (1.96)
42.25 (7.07)
41.45 (2.32)
P
h<.001
*P
g=.184
第 二 次 雙 腳 支 撐期
(%步態時間)
15.32 (1.65)
14.78
*(1.83)
10.70 (2.57)
10.66
*(1.50)
9.58 (1.33)
9.34 (0.59)
9.57 (2.22)
9.22 (1.65)
P
h<.001
*P
g=.592
跟隨腳擺動期 (%步態時間)
32.29†
(7.66)
35.66†
*(1.74)
35.56 (3.78)
37.99†
(1.88)
35.05 (3.88)
39.49†
(1.30)
35.72 (7.43)
40.40†
(1.20)
P
h<.034
*P
g=.008†
在整個跨越步態時間下,年齡與障礙高度二自變項交互作用達顯著 (F=5.472
*),下頁表 4-4-1 呈現單純主要效果檢定與事後比較結果。
表 4-4-1:步態時間之單純主要效果變異數分析摘要表
變異來源 SS DF MS F 事後比較
年齡因子(A)
在無高度(b1) 0.074 1 0.074 4.458
*老年>年輕 在低高度(b2) 0.556 1 0.556 8.455
**老年>年輕 在中高度(b3) 1.193 1 1.193 5.247
*老年>年輕 在高高度(b4) 2.640 1 2.640 8.099
*老年>年輕 高度因子(B)
在老年組(a1) 6.767 3 2.255 20.521
*H>M>L>F 在年輕組(a2) 1.484 3 0.495 54.568
***H>M>L>F
*
P<.05
**P<.01
***P<.001
註:事後比較欄中 F 表無高度;L 表低高度;M 表中高度;H 表高高度
由表 4-4-1 得知:
(1)就高度情境而言,老年組的跨越步態時間均顯著高於年輕組,可見得老 年組在各種不同障礙高度下,所花費的步態時間較年輕組多。
(2)就年齡變項而言,老年組與年輕組均隨障礙高度增加而顯著花費較多步 態時間。
總括來說,隨著障礙高度的提升,老年組與年輕組均花費較多的步態
時間來進行跨越動作,且老年組在跨越各種高度時,所花費的步態時間顯
著多於年輕組,此結果推論與老年組衰退的生理狀況有關,在跨越較高的
障礙高度時,明顯需要花費更多的步態時間來調整跨越動作,以求安全通
過各種高度的障礙情形,。
而再將整個跨越步態時間細分為:跟隨腳第一次雙腳支撐期、跟隨腳 單腳支撐期、跟隨腳第二次雙腳支撐期及跟隨腳擺動期。由表 4-4 結果發 現:(1)老年組與年輕組在跨越不同障礙高度下,跟隨腳第一次雙腳支撐期 組內達顯著差異(F>L,F>M,F>H,L>M),但組間並無顯著不同。(2)老年 組與年輕組在跨越不同障礙高度下,跟隨腳單腳支撐期組內(F<L,F<M,
F<H,L<M,L<H)達顯著差異,但組間並無顯著不同。(3)老年組與年輕組 在跨越不同障礙高度下,跟隨腳第二次雙腳支撐期組內達顯著差異(F>L,
F>M,F>H,L>M,L>H),但組間並無顯著不同。(4)老年組與年輕組在跨 越不同障礙高度下,跟隨腳擺動期組內(F<M,F<H)與組間(年>老)均達顯著 差異。
由下頁圖 4-3 可以發現隨著障礙高度提升,兩組受試者的第 1 次雙腳支
撐期逐漸減少,而跟隨腳單腳支撐期則逐漸增加,至第 2 次雙腳支撐期又
隨高度而減少,最後跟隨腳擺動期在中高度與高高度障礙情境下,擺動期
較無障礙情境增加。由各個跨越的步態時間分配來看:兩組受試者的第 1
與第 2 次雙腳支撐期隨高度增加而減少,推論是為了分別使接下來先行腳
與跟隨腳能儘快越過障礙物,而縮短兩次雙腳支撐期時間。增加跟隨腳單
腳支撐期讓先行腳具充分時間越過障礙物。相同地,跟隨腳擺動期在中高
度與高高度障礙情境下必須花費較多時間在空中克服較高難度的跨越動
作,且年輕組在跨越各種障礙高度時,擺動期皆顯著高於老年組,可見年
輕組有能力花較多時間來調整下肢空中跨越動作及尋找跨越腳著地的適當
位置。
DS1 TSS DS2 TSW
0 20 40 60 80 100
%步態循環
步態分期
年輕組 老年組
DS1 TSS DS2 TSW
0 20 40 60 80 100
%步態循環
步態分期
年輕組 老年組
DS1 TSS DS2 TSW
0 20 40 60 80 100
%步態循環
步態分期
年輕組 老年組
DS1 TSS DS2 TSW
0 20 40 60 80 100
%步態循環
步態分期
年輕組 老年組
另外值得注意的是,對於老年組在跨越不同高度步態時間分配中,關 於兩次雙腳支撐期(DS1 與 DS2)隨障礙高度增加而減少,以及跟隨腳單腳支 撐期隨障礙高度增加而增加的兩個現象,很可能造成老年人重心不穩或跌 倒的風險。因為在跨越時老年人若能延長兩次的雙腳支撐時期,則較能使 身體處在一個步態速度較低的狀態,並保持身體重心有較長時間的穩定情 形,對接下來的跨越動作有較大幫助。至於跟隨腳單腳支撐期隨高度增加 的現象,雖是不可避免的結果,然一旦單腳支撐期延長就需要有更好的身 體平衡能力及下肢肌力來維持動態平衡,因此對於此二跨越步態時間分配 現象,老年人尤須注意。
(a) (b)
(c) (d)
圖 4-3:跨越不同障礙高度之步態時間分配。其中(a)為無障礙高度、(b)為低障礙高度、
(c)為中障礙高度、(d)為高障礙高度;步態分期為 DS1:第 1 次雙腳支撐期、
TSS:跟隨腳單腳支撐期、DS2:第 2 次雙腳支撐期、TSW:跟隨腳擺動期
M(SD);
*p
h:高度有顯著差異;†p
g:組別有顯著差異
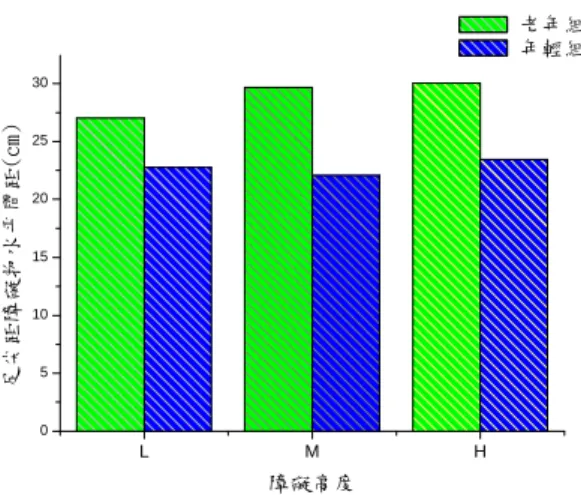
(四)跨越不同障礙高度跟隨腳與障礙物之距離關係
表 4-5 顯示老年組與年輕組在不同高度跨越步態下,跟隨腳與障礙物之 距離參數。
表 4-5:跟隨腳與障礙物之距離參數
障礙高度 低高度(L) 中高度(M) 高高度(H) P 值
*老年組 年輕組 老年組 年輕組 老年組 年輕組 足 尖 距 障 礙 物
水平間距(cm)
27.00 (1.73)
22.77†
(2.32)
29.66 (3.87)
22.08†
(3.25)
30.03 (3.06)
23.46†
*(2.27)
P
h=.003
*P
g<.001†
足 跟 距 障 礙 物 最大高度(cm)
47.84 (5.59)
46.34 (5.03)
52.27 (6.57)
52.45
*(4.84)
46.06 (4.38)
47.94 (6.00)
P
h=.002
*P
g=.909
在跨越動作前,老年組與年輕組足尖距離障礙物之水平間距結果顯示
組內(H>L)與組間(老>年)皆達顯著差異。而在執行跨越動作時,老年組與年
輕組足跟距障礙物最大高度結果顯示組內達顯著差異(M>L,M>H),但組
間無顯著不同。
圖 4-4 顯示老年組與年輕組跨越不同障礙高度前,跟隨腳足尖距障礙物 之水平間距。由圖中顯示,老年組在跨越較高障礙高度前,其跟隨腳足尖 距障礙物之水平間距亦隨之增加,且與年輕組達顯著差異。此結果與 Chou, Draganich (1998) 的研究結果相似,認為老年人在跨越較高障礙物之前,會 調整跟隨腳與障礙物的間距,使身體有較多的空間來進行跨越動作而避免 碰觸障礙物,此預先調節自身與障礙物的空間距離策略,對老年人跨越障 礙物扮演重要因素。
L M H
0 5 10 15 20 25 30
足尖距障礙物水平間距(cm)
障礙高度
老年組 年輕組
圖 4-4:跨越不同障礙高度前足尖距障礙物水平間距
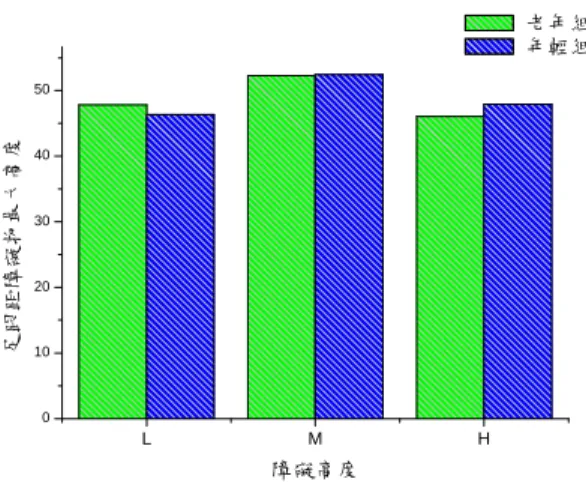
圖 4-5 顯示老年組與年輕組跨越不同障礙高度時,跟隨腳足跟距障礙物 之最大高度。由圖 4-5 與表 4-5 可以知道在跨越低高度與中高度障礙情境 時,老年組與年輕組會增加其跟隨腳足跟距障礙物之最大高度,但跨越高 高度障礙時其足跟距障礙物之最大高度卻顯著低於跨越中高度障礙情境,
這可能與高障礙的高度(35 公分)有關。因為在低高度(5 公分)與中高度(20 公分)障礙下,受試者爲避免跟隨腳跨越時碰觸障礙物,會隨障礙高度增加 而提高跟隨腳腳跟與障礙物的垂直距離,但跨越高障礙高度時,由於高障 礙高度再加上腳跟與障礙物的垂直距離,可能已超過受試者提腳高度的極 限,因此較中高度障礙之腳跟與障礙物最大垂直距離來得小。
L M H
0 10 20 30 40 50
足跟距障礙物最大高度
障礙高度
老年組 年輕組
圖 4-5:跨越不同障礙高度時足跟距障礙物最大高度
M(SD);
*p
h:高度有顯著差異;†p
g:組別有顯著差異
第二節、不同高度跨越步態之單腳支撐期對身體重心平衡的影響
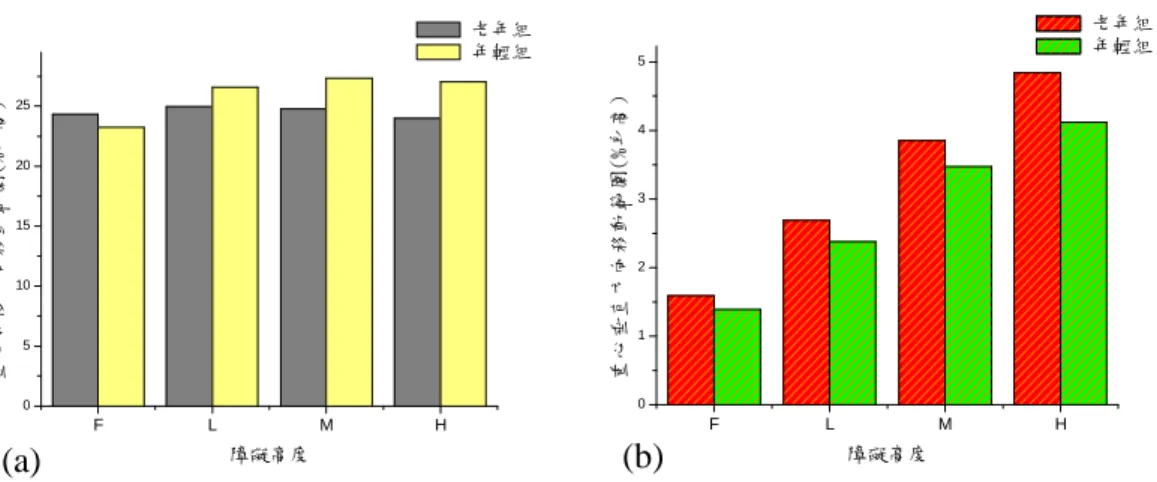
(一)不同高度跨越步態對單腳支撐期身體重心移動範圍之影響
表 4-6 呈現不同高度跨越步態之跟隨腳單腳支撐期身體重心前後與垂 直方向移動範圍。
表 4-6:跟隨腳單腳支撐期之身體重心前後與垂直方向移動範圍
障礙高度 無高度(F) 低高度(L) 中高度(M) 高高度(H) P 值
*老年組 年輕組 老年組 年輕組 老年組 年輕組 老年組 年輕組 重 心 前 後 方 向
移動範圍 (%身高)
24.32 (2.90)
23.25 (3.07)
24.96 (3.78)
26.85
*(3.58)
24.79 (5.07)
27.32
*(3.08)
24.00 (5.98)
27.03 (3.63)
P
h=.044
*P
g=.311
重 心 垂 直 方 向 移動範圍 (%身高)
1.59 (0.42)
1.39 (0.41)
2.69 (0.55)
2.38
*(0.45)
3.85 (0.34)
3.47
*(0.63)
4.84 (1.55)
4.12
*(0.86)
P
h<.001
*P
g=.089
表 4-6 中,老年組與年輕組在單腳支撐期重心前後方向移動範圍上,組
內達顯著差異(M>F,L>F),但老年組與年輕組組間無顯著不同。而在單腳
支撐期重心垂直方向移動範圍上,組內達顯著差異,且隨障礙高度增加而
增加(H>M>L>F),但老年組與年輕組組間無顯著不同。
圖 4-6 為跨越不同障礙高度時,跟隨腳單腳支撐期身體重心的移動範 圍。在前後方向的重心移動範圍上,老年組與年輕組面對低障礙高度與中 障礙高度情境時,會較無障礙高度顯著增加重心的前後方向位移,但面對 高障礙高度情境時,則無顯著增加。而在垂直方向的重心移動範圍上,老 年組與年輕組皆隨著障礙高度增加而顯著增加;雖然老年組與年輕組組間 並無顯著差異,但老年組在各種障礙高度下重心的垂直方向位移皆高於年 輕組。
F L M H
0 5 10 15 20 25
重心前後方向移動範圍(%身高)
障礙高度
老年組 年輕組
F L M H
0 1 2 3 4 5
重心垂直方向移動範圍(%身高)
障礙高度
老年組 年輕組
圖 4-6:跨越不同障礙高度跟隨腳單腳支撐期 身體重心移動範圍,
其中(a)為前後方向,(b)為垂直方向
(a) (b)
M(SD);
*p
h:高度有顯著差異;†p
g:組別有顯著差異
(二)不同高度跨越步態對單腳支撐期身體重心與壓力中心之距離 表 4-7 顯示跟隨腳單腳支撐期之身體重心與壓力中心最大距離。
表 4-7:跟隨腳單腳支撐期之身體重心與壓力中心最大距離
障礙高度 無高度(F) 低高度(L) 中高度(M) 高高度(H) P 值
*老年組 年輕組 老年組 年輕組 老年組 年輕組 老年組 年輕組 重心與壓力中心
最大距離 (%身高)
9.87 (1.05)
10.44 (1.04)
11.39 (0.76)
11.63
*(1.38)
12.17 (3.18)
11.92
*(1.68)
11.88 (3.36)
11.41
*(1.91)
P
h=.01
*P
g=.972
表 4-7 中,老年組與年輕組組內達顯著差異(L>F,M>F,H>F),但組 間無顯著不同。且在無高度漸增至中高度障礙情境時,重心與壓力中心最 大距離有顯著增加,但在高高度障礙情境時,重心與壓力中心最大距離僅 比無障礙高度情境時顯著增加。
下頁圖 4-7 為一位老年受試者在跨越高障礙高度情境下,跟隨腳單腳支
撐期身體重心與壓力中心間距之時間變化圖。從圖 4-7 中可看出在跟隨腳單
腳支撐起始瞬間(LTO),身體重心落於跟隨腳壓力中心之後,而身體重心隨
先行腳跨越動作向前帶動,導致重心與壓力中心間距由大遞減,而在單腳
支撐中期(約 45-50%)重心與壓力中心間距下降至最低。此後隨先行腳跨越
至著地(LHS)前,身體重心逐漸落於跟隨腳壓力中心之前,此時重心與壓力
中心間距再持續上升。
-0.25 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2
0 8 17 25 33 42 50 58 67 75 83 92 100
Chou, Kaufman, Brey and Draganich (2001)及 Hahn and Chou (2004)等學 者研究指出:跨越較高的障礙物,將顯著影響身體重心的移動範圍並與支 撐腳壓力中心具有交互作用。導致有較大的向前重心移動範圍、較慢的向 前速度及較大的垂直重心移動範圍、較快的向上速度。其研究提到在跨越 步態中期,受試者減少向前的重心速度,可能是爲幫助達到較大的重心與 壓力中心間距,而產生的一種補償性調整動作;意即在身體能保持平衡穩 定的限度內,利用減少向前的重心速度來換取增加重心-壓力中心間距及加 大身體重心向前的移動範圍,以順利讓身體越過障礙物。
重心與壓力中心間距 (重心在後)
重心與壓力中心間距 (重心在前)
(a) (b)
(c)
LHS
LTO
重 心 與 壓 力 中 心 間 距 變 化 (% B H ) 跟隨腳單腳支撐期(%)
圖 4-7:一位老年人之 跟隨腳單腳支撐期身體重心─壓力中心間距時間變
化圖。其中(a)先行腳離地瞬間(LTO),(b)為先行腳著地瞬間(LHS),
(C)為 身體重心─壓力中心間距之時間變化圖
M(SD);
*p
h:高度有顯著差異;†p
g:組別有顯著差異
本研究對重心移動範圍和重心與壓力中心間距的變化,大致符合上述 論點,其中,老年組在跨越高障礙高度情境下,可能由於此障礙高度(35 公 分)已經無法再讓其隨高度上升而增加重心向前的位移量(或說是步幅長度 隨高度減少),因而重心-壓力中心間距亦在高障礙高度情境下有減少的趨 勢,如此方能使身體保持在平衡的穩定限度內。所以跨越較高障礙物時,
身體重心與支撐腳壓力中心的交互作用,對跨越動作的平衡穩定具有重要 影響力。
(三)不同高度跨越步態對單腳支撐期身體重心線動量之變化
表 4-8 顯示不同高度跨越步態時,跟隨腳單腳支撐期之向前平均身體重 心線動量。
表 4-8:跟隨腳單腳支撐期之向前平均身體重心線動量
障礙高度 無高度(F) 低高度(L) 中高度(M) 高高度(H) P 值
*老年組 年輕組 老年組 年輕組 老年組 年輕組 老年組 年輕組 重心線動量
(kg*m/s)
56.21 (14.67)
69.77†
*(11.56)
44.49 (12.80)
63.08†
*(13.99)
34.20 (12.61)
52.79†
*(12.69)
29.48 (10.50)
49.40†
(13.19)
P
h<.001
*P
g=.004†
表 4-8 中,老年組與年輕組組內(F>L>M>H)與組間(年>老)皆達顯著差 異。隨著障礙高度增加,老年組與年輕組之單腳支撐期向前平均身體重心 線動量顯著減少,且老年組顯著小於年輕組。
圖 4-8 為一位老年受試者跨越不同高度障礙物之向前重心線動量─時 間關係圖,圖 4-9 為一位年輕受試者跨越不同高度障礙物之向前重心線動量
─時間關係圖。從圖 4-8 與圖 4-9 中可以發現老年受試者與年輕受試者不論
是無障礙高度或高障礙高度情境下,於先行腳腳尖離地瞬間(LTO)重心線動 量先呈現下降趨勢,而在先行腳腳跟著地前(LHS)重心線動量再呈現上升趨 勢。關於跨越不同障礙高度時向前重心線動量與時間的變化由高變低,再 逐漸上升的趨勢,是由於向前線動量受跨越動作的重心向前速度影響。因 為由先行腳離地瞬間(LTO)之前重心的向前速度是增加的,但在先行腳離地 瞬間,即是跟隨腳單腳支撐期的開始,此時,身體向前的重心速度遞減,
增加跟隨腳單腳支撐的穩定性,直到先行腳越過障礙物上空後,身體開始 向前傾倒,以破壞跟隨腳單腳支撐期的穩定程度,此時重心的向前速度逐 漸增加,並在先行腳著地(LHS)瞬間後持續增加;所以重心向前的線動量變 化量即與重心向前速度變化量具有密切關係。
0 20 40 60 80 100
44 46 48 50 52 54 56 58 60 62
LHS LTO
重心線動量(kg*m/s)
跟隨腳單腳支撐時間(%)
0 20 40 60 80 100
10 20 30 40 50 60
LHS LTO
重心線動量(kg*m/s)
跟隨腳單腳支撐時間(%)
圖 4-8:一位老年人跨越不同高度障礙物之向前重心線動量與時間關係圖。
其中(a)為無障礙高度、(b)為高障礙高度;圖中虛線表示跨越腳 腳跟擺動至最高處時間點。
(a) (b)
0 20 40 60 80 100 50
55 60 65 70
LHS LTO
重心線動量(kg*m/s)
跟隨腳單腳支撐時間(%)
0 20 40 60 80 100
15 20 25 30 35 40 45 50
LHS LTO
重心線動量(kg*m/s)
跟隨腳單腳支撐時間(%)
此外,就不同障礙高度情境的身體向前線動量比較來看,兩組受試者 皆隨障礙高度增加,而減少跟隨腳單腳支撐期之向前平均身體重心線動 量,且老年組於每種障礙高度情境下皆低於年輕組,此原因除了與重心向 前速度減少有關外,更顯示老年組在跨越較高障礙情境時於單腳支撐期間 能減少身體向前線動量,以降低身體過多動量來維持重心平衡。此外,年 輕受試者於高障礙高度情境下,單腳支撐期的重心線向前線動量提升較老 年受試者早,這與年輕受試者在跨越期間先行腳著地前較快且較早提升重 心向前速度有關。
(a) (b)
圖 4-9:一位年輕人跨越不同高度障礙物之向前重心線動量與時間關係圖。
其中(a)為無障礙高度、(b)為高障礙高度;圖中虛線表示跨越腳
腳跟擺動至最高處時間點。
M(SD);
*p
h:高度有顯著差異;†p
g:組別有顯著差異
第三節、不同高度跨越步態對產生制動與推蹬反作用力之影響
(一)不同高度跨越步態產生前後方向最大制動與推蹬反作用力之影響
表 4-9 顯示在不同高度跨越步態下,前後方向產生最大制動與推蹬反作 用力。
表 4-9:跟隨腳支撐期前後方向之最大制動與推蹬地面反作用力
障礙高度 無高度(F) 低高度(L) 中高度(M) 高高度(H) P 值
*老年組 年輕組 老年組 年輕組 老年組 年輕組 老年組 年輕組 最 大 制 動 反 作
用力(%BW)
16.71 (4.42)
16.61 (5.71)
16.82 (4.23)
18.92 (6.42)
19.32 (5.73)
21.86
*(5.47)
20.37 (6.69)
23.67
*(6.71)
P
h<.001
*P
g=.386
最 大 推 蹬 反 作 用力(%BW)
16.11 (2.11)
16.99 (2.93)
18.10 (2.87)
20.29 (2.95)
18.75 (3.60)
21.08 (2.83)
18.18 (3.14)
20.94 (2.33)
P
h<.001
*P
g=.064
在前後方向最大制動反作用力上,老年組與年輕組組內達顯著差異 (H>F,H>L,M>F,M>L),但組間並無達顯著差異。而在前後方向最大推 蹬反作用力上,老年組與年輕組組內達顯著差異(H>F,M>F,L>F),但組 間並無達顯著差異。
圖 4-10 為不同高度跨越步態跟隨腳支撐期之最大制動力量與最大推蹬
力量。由不同高度跨越步態所產生的最大制動反作用力來看,在跨越較高
的障礙高度之前,跟隨腳的最大制動力量也隨之增加,目的在跨越動作之
前給予身體一較大的制動力量,幫助減緩步態速度上升,讓身體能在跨越
較高障礙物時,保持較低的跨越步態速度。而從不同高度跨越步態所產生
的最大推蹬反作用力來看,在跨越較高障礙高度之前,跟隨腳的最大推蹬
力量也隨之增加;Begg, Sparrow, and Lythgo (1998)也提出相同結果,認為要
跨過較高障礙物時,於推蹬期會有較大的垂直與前後方向的力量產生;因 此,在執行跨越步態時除了先行腳會產生推蹬力量之外,更需要跟隨腳提 供較大的推蹬助力,幫助先行腳擺動過較高障礙物。
F L M H
0 5 10 15 20 25
最大制動力量(%BW)
障礙高度
老年組 年輕組
F L M H
0 2 4 6 8 10 12 14 16 18 20 22
最大推蹬力量(%BW)
障礙高度
老年組 年輕組
雖然,兩組受試者在跨越各種障礙高度下最大制動力量與推蹬力量無 達顯著差異,但老年組在最大制動、推蹬力量皆小於年輕組。關於老年組 較弱的制動力量可以解釋為:在跨越不同高度前步態速度小於年輕組,因 此僅需要較小的制動力量就可使跨越前的速度減緩下來;然而針對老年受 試者跨越不同障礙高度較弱的推蹬力量來說,可能是因老化造成下肢肌肉 推蹬力不足,容易造成跨越動作遲滯緩慢、缺乏前進動力,甚至連帶影響 先行腳碰觸障礙物的危機。
圖 4-10:不同高度跨越步態跟隨腳支撐期之最大制動力量(a)
與最大推蹬力量(b)
M(SD);
*p
h:高度有顯著差異;†p
g:組別有顯著差異;height*age
*:交互作用有顯著差異
(二)不同高度跨越步態之跟隨腳支撐期前後與垂直方向衝量
表 4-10 顯示在不同高度跨越步態下,跟隨腳支撐期前後與垂直方向衝 量。
表 4-10:跟隨腳支撐期前後方向與垂直方向衝量
障礙高度 無高度(F) 低高度(L) 中高度(M) 高高度(H) P 值
*老年組 年輕組 老年組 年輕組 老年組 年輕組 老年組 年輕組 制動衝量
(N
*s/ BW)
0.032 (0.009)
0.027 (0.009)
0.042 (0.009)
0.038
*(0.009)
0.053 (0.008)
0.052
*(0.008)
0.059 (0.104)
0.058
*(0.124)
P
h<.001
*P
g=.407 推蹬衝量
(N
*s/ BW)
0.030 (0.007)
0.026 (0.004)
0.040 (0.008)
0.030 (0.004)
0.053 (0.011)
0.037 (0.006)
0.057 (0.010)
0.037 (0.009)
height*age
*P=.002
*垂直衝量
(N
*s/ BW)
0.700 (0.164)
0.583 (0.043)
0.854 (0.183)
0.652 (0.080)
1.118 (0.413)
0.775 (0.106)
1.268 (0.452)
0.821 (0.113)
height*age
*P=.01
*在 前 後 方 向 制 動 衝 量 上 , 老 年 組 與 年 輕 組 組 內 達 顯 著 差 異 (H>M>L>F),但組間並無達顯著差異;在前後方向推蹬衝量與垂直衝量上,
年齡與障礙高度二個自變項的交互作用皆達顯著(F=5.414
*; F=6.336*),因
此於表 4-10-1 與表 4-10-2 分別呈現推蹬衝量與垂直衝量之單純主要效果檢
定與事後比較結果。
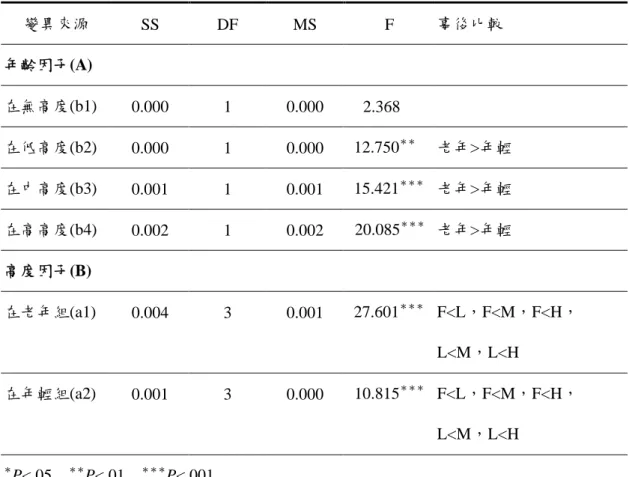
表 4-10-1:跟隨腳支撐期前後方向推蹬衝量之單純主要效果 變異數分析摘要表
變異來源 SS DF MS F 事後比較
年齡因子(A)
在無高度(b1) 0.000 1 0.000 2.368
在低高度(b2) 0.000 1 0.000 12.750
**老年>年輕 在中高度(b3) 0.001 1 0.001 15.421
***老年>年輕 在高高度(b4) 0.002 1 0.002 20.085
***老年>年輕 高度因子(B)
在老年組(a1) 0.004 3 0.001 27.601
***F<L,F<M,F<H,
L<M,L<H
在年輕組(a2) 0.001 3 0.000 10.815
***F<L,F<M,F<H,
L<M,L<H
*
P<.05
**P<.01
***P<.001
註:事後比較欄中 F 表無高度;L 表低高度;M 表中高度;H 表高高度
由表 4-10-1 得知:
(1)就高度情境而言,老年組跨越低、中、高障礙高度時,跟隨腳支撐期前 後方向之推蹬衝量均顯著高於年輕組。
(2)就年齡變項而言:老年組與年輕組均在跨越高高度障礙時所產生的前後
方向推蹬衝量顯著高於無高度與低高度,而在中高度情境推蹬衝量又顯
著高於無高度與低高度,低高度情境又高於無高度情境。
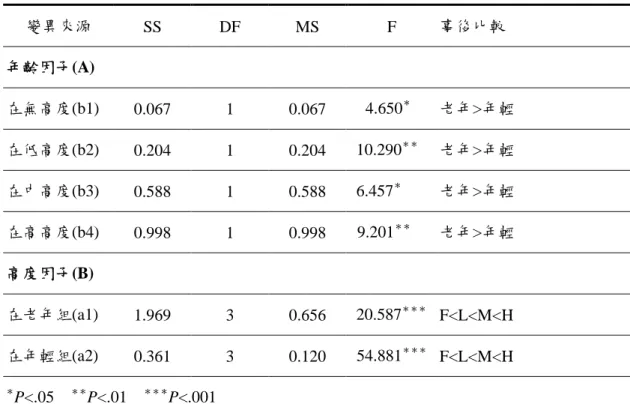
表 4-10-2:跟隨腳支撐期垂直衝量之單純主要效果變異數分析摘要表
變異來源 SS DF MS F 事後比較
年齡因子(A)
在無高度(b1) 0.067 1 0.067 4.650
*老年>年輕 在低高度(b2) 0.204 1 0.204 10.290
**老年>年輕 在中高度(b3) 0.588 1 0.588 6.457
*老年>年輕 在高高度(b4) 0.998 1 0.998 9.201
**老年>年輕 高度因子(B)
在老年組(a1) 1.969 3 0.656 20.587
***F<L<M<H 在年輕組(a2) 0.361 3 0.120 54.881
***F<L<M<H
*
P<.05
**P<.01
***P<.001
註:事後比較欄中 F 表無高度;L 表低高度;M 表中高度;H 表高高度
由表 4-10-2 得知:
(1)就高度情境而言,老年組跨越低、中、高障礙高度時,跟隨腳支撐期垂 直衝量均顯著高於年輕組。
(2)就年齡變項而言:老年組與年輕組均隨障礙高度增加而產生顯著較大的 垂直衝量。
大致上來說,隨著障礙高度提升,受試者在跟隨腳支撐期產生較多的 前後推蹬衝量與垂直衝量,幫助身體由制動狀態轉為向前與向上移動。而 老年組在跨越各種高度時,所產生的推蹬衝量與垂直衝量皆顯著高於年輕 組。推論老年組在跨越逐漸提升的障礙高度時,雖然下肢產生較小的地面 反作用力,但作用在第一次雙腳支撐期及單腳支撐期的時間較年輕組多,
以獲得較大垂直與推蹬衝量來完成跨越動作。
(三)跨越不同障礙高度之跟隨腳支撐期衝量與步幅長度的關係
Warren, Young, and LEE (1986) 等學者曾提出在跑步中越過不規則地 面時,步幅長度的調整改變與垂直衝量有關;而 Patla, Robinson, Samways, and Armstrong (1989) 則曾探討視覺效果對步行中步幅長度控制的影響,發 現跟隨腳垂直與前後衝量對步幅長度的調整是依據視覺線索時間的長短,
來調整步長成為較長、一般或較短的步幅,以將跨越腳放置在安全的目標 物上;且較長的步幅與較充裕的視覺線索、垂直與前後衝量的增加有關。
然而在本研究結果中,且不論視覺線索之影響,老年組與年輕組於步 幅長度調整與垂直、前後衝量皆無達顯著相關。雖然老年組的制動衝量與 步幅長度無達顯著相關(r=-.933,p=.067)、推蹬衝量與步幅長度亦無達顯著 相關(r=-.923,p=.077),乃至垂直衝量與步幅長度無顯著相關(r=-.894,
p=.106),但發現垂直、前後衝量皆與步幅長度之間具有負相關的趨勢。此
結果與先前 Patla (1989) 等人認為步幅長的增加與垂直、前後衝量的增加有
關恰好相反;推論可能是動作型態不同而導致相反的結果。因為本研究實
驗設計為跨越不同障礙高度動作而非純粹的步行動作,特別是老年人在跨
越逐漸增高的障礙物時,支撐腳需要花費較多作用時間,來增加較多垂直
與前後衝量以提升重心垂直位移,讓身體藉由“提高”策略謹慎地通過較
高障礙物,而非是用增加跨越步幅長度之“向前”策略。
a b c d
第四節、不同跨越步態對跟隨腳下肢肌群肌電訊號之影響
本研究偵測的肌群包括大腿部分的股直肌(伸膝、屈髖肌群)、股二頭肌 (屈膝、伸髖肌群),小腿部分的脛骨前肌(屈踝肌群)、腓腸肌(伸踝肌群)等 肌群,在行走六公尺後跨越不同高度障礙物的表面肌電訊號變化。
(一)下肢肌群肌電訊號
老年組 11 號受試者跨越無障礙高度情境下肢肌群肌電訊號,如圖 4-11 所示。
s
-5 0 5 10
3.0 2.5 2.0 1.5 1.0 0.5 0.0 3.0 2.5 2.0 1.5 1.0 0.5 0.0 3.0 2.5 2.0 1.5 1.0 0.5 0.0 3.0 2.5 2.0 1.5 1.0 0.5 0.0
Recorder 0 Recorder 1 Recorder 2 Recorder 3 Recorder 4
圖 4-11:老年組 11 號受試者跨越無障礙高度情境下肢肌群肌電訊號。其中,A:股直肌、B:
股二頭肌、C:脛骨前肌、D:腓腸肌;a 時間點:先行腳離地(LTO)、b 時間點:
先行腳著地(LHS)、c 時間點:跟隨腳離地(TTO)、d 時間點:跟隨腳著地(THS)
( m V )
時間 ( s ) A
B
C
D
a bc d
圖 4-12 為老年組 11 號受試者跨越低障礙高度情境下肢肌群肌電訊號。
s
0 5 10 15
3.0 2.5 2.0 1.5 1.0 0.5 0.0 3.0 2.5 2.0 1.5 1.0 0.5 0.0 3.0 2.5 2.0 1.5 1.0 0.5 0.0 3.0 2.5 2.0 1.5 1.0 0.5 0.0
Recorder 0 Recorder 1 Recorder 2 Recorder 3 Recorder 4
時間 ( s )
( m V )
A
B
C
D
圖 4-12:老年組 11 號受試者跨越低障礙高度情境下肢肌群肌電訊號。其中,A:股直肌、B:
股二頭肌、C:脛骨前肌、D:腓腸肌;a 時間點:先行腳離地(LTO)、b 時間點:
先行腳著地(LHS)、c 時間點:跟隨腳離地(TTO)、d 時間點:跟隨腳著地(THS)
a bc d
圖 4-13 為老年組 11 號受試者跨越中障礙高度情境下肢肌群肌電訊號。
s
-5 0 5 10 15
3.0 2.5 2.0 1.5 1.0 0.5 0.0 3.0 2.5 2.0 1.5 1.0 0.5 0.0 3.0 2.5 2.0 1.5 1.0 0.5 0.0 3.0 2.5 2.0 1.5 1.0 0.5 0.0
Recorder 0 Recorder 1 Recorder 2 Recorder 3 Recorder 4
時間 ( s )
( m V )
A
B
C
D
圖 4-13:老年組 11 號受試者跨越中障礙高度情境下肢肌群肌電訊號。其中,A:股直肌、B:
股二頭肌、C:脛骨前肌、D:腓腸肌;a 時間點:先行腳離地(LTO)、b 時間點:
先行腳著地(LHS)、c 時間點:跟隨腳離地(TTO)、d 時間點:跟隨腳著地(THS)
a bc d
圖 4-14 為老年組 11 號受試者跨越高障礙高度情境下肢肌群肌電訊號。
s
0 5 10 15
3.0 2.5 2.0 1.5 1.0 0.5 0.0 3.0 2.5 2.0 1.5 1.0 0.5 0.0 3.0 2.5 2.0 1.5 1.0 0.5 0.0 3.0 2.5 2.0 1.5 1.0 0.5 0.0
Recorder 0 Recorder 1 Recorder 2 Recorder 3 Recorder 4