第五章 線性壓電陶瓷馬達位置控制實驗
5.1 壓電陶瓷馬達之簡介
壓電陶瓷馬達(Piezoelectric Ceramic Motor)之演進是由超音波馬達
(Ultrasonic Motor)而來,兩者的主要差別在於陶瓷材料組合之結構體不 同,至於驅動方式則相近。超音波馬達是利用壓電陶瓷變形產生高頻的彈性 振動來獲得驅動力,再利用摩擦力帶動滑動子(Slider)而驅動的馬達[38]。
一般而言,超音波馬達具有以下特點[29-30]:
1. 一般傳統的電磁馬達在高轉速時有低轉矩、高效率;但是超音波馬達在 低速度時有高推力、高效率。
2. 單位重量所產生的推力很高,啟動及停止的特性優異。
3. 不經過齒輪的轉換,可直接驅動便可產生高推力。
4. 無齒輪之慣性及齒隙的誤差,可以達到精密定位。
5. 具有高保持性,既使電源切斷時,仍能保持在原來之位置。
6. 運轉時安靜、低噪音且不受電磁干擾。
7. 結構簡單且體積小。
另外,目前超音波馬達的總集動態數學模型很難正確獲得,且其馬達參 數為非線性時變特性,易受溫度、負載變化等的影響[38]。由於超音波馬達 具有不同於傳統電磁馬達的特性,因此被大量地應用於半導體設備、車用後 視鏡、顯微鏡、照相機、DVD、醫療器材以及精密定位控制上。
本研究採用 HR4 線性壓電陶瓷馬達(Linear Piezoelectric Ceramic Motor, LPCM)主要是由一具有正面四個電極和一反面的接地電極之矩形壓電陶瓷 所組合而成,如圖 5-1 所示。A、B、C 和 D 四個電極如同西洋棋般附著在 正面並分別覆蓋四分之一的表面,而反面則由單一電極來覆蓋,其中 A、D 與 B、C 為成對的電極並以電線相連接,而反面電極則經由一可調變共振頻
率的電感接地。四個高彈性係數的支撐彈簧(Support Spring)沿著馬達的長 邊連接在壓電陶瓷上。相當硬的一個陶瓷傳動子(Spacer)接合在壓電陶瓷 短邊的中間,而另一個短邊的中間有一個緊壓在壓電陶瓷上的預力彈簧
(Preload Spring)。預力彈簧提供一壓力在傳動子和滑動平台之間,如此傳 動子便可將驅動力傳遞至滑動平台使之移動[28]。
滑動平台
y
x
B
C D
A
O’
O
傳動子
壓電陶瓷 可調電感
支撐彈簧
預力彈簧
圖 5.1 線性壓電陶瓷馬達之結構圖
線性壓電陶瓷馬達之工作原理是基於壓電陶瓷在共振頻率下所激發的 兩個振動模式,即彎曲模式(Bending Mode)和長度模式(Longitudinal Mode),如圖 5-2 所示。利用 x 方向的彎曲振動和 y 方向的長度振動,可以 在壓電陶瓷的 xy 平面上產生橢圓形運動。
∆x ∆y
(a) 彎曲模式 (b) 長度模式 圖 5-2 彎曲模式與長度模式
當弦波電壓由 A、D 對電極輸入時,壓電陶瓷的前端(傳動子)會形成,
如圖 5-3(a)所示之輸出位移,使得滑動平台向右移動;相反地,若將弦波電 壓改由 B、C 對電極輸入時,壓電陶瓷的前端(傳動子)會形成,如圖 5-3(b) 所示之輸出位移,使得滑動平台向左移動。
線性壓電陶瓷馬達
∆x
∆y
滑動平台
O′ O′
O O
(a) A、D 對電極之輸出位移及運動方向
線性壓電陶瓷馬達
∆x
∆y
滑動平台
O′ O′
O O
(b) B、C 對電極之輸出位移及運動方向 圖 5-3 線性壓電陶瓷馬達之輸出位移示意圖
5.2 實驗系統架構
線性壓電陶瓷馬達位置控制實驗之硬體架構如圖 5-4 所示,主要設備包 括:1. 個人電腦;2. 伺服控制卡;3. 線性壓電陶瓷馬達;4. 馬達驅動器;
5 光學尺。實驗設備之外觀圖,如圖 5-5 所示。
數位/類比 轉換器
輸入/輸出埠
解碼器介面 及計時器
馬達驅動器
線性壓電陶瓷馬達
滑動平台
光學尺 個人電腦
y
伺服控制卡
u
圖 5-4 線性壓電陶瓷馬達位置控制實驗之硬體架構圖
圖 5-5 線性壓電陶瓷馬達位置控制實驗設備 底下針對本實驗控制系統之主要設備分別說明如下:
一.個人電腦:
以 Pentium III 800 之個人電腦負責控制程式之執行,將計算所得之輸出 控制力,透過伺服控制卡傳送到驅動器。
二.伺服控制卡:
伺服控制卡採用台灣仿真科技公司所自行研發之 AD/DA 伺服控制卡,
型號為 MPAC-6A,負責將光學尺之測量訊號讀入電腦,並將電腦計算所得 之控制命令透過數位/類比轉換電路轉換成電壓訊號傳送給馬達驅動器,詳 細之產品規格說明如表 5-1 所示。
表 5-1 AD/DA 伺服控制卡之規格[42]
通道數 4 Channels 解析度 12 Bits 轉換時間 5µs 類比輸出(D/A)
輸出範圍 ±10V 通道數 8 Channels 解析度 12 Bits 轉換時間 10µs 類比輸入(A/D)
輸出範圍 ±5V 通道數 2 組
輸入型式 Line Driver 計數器 16 Bits 編碼信號輸入
計數器清除信號 雙通道 通道數 16 Bits 數位輸出(DO)
輸出等級 TTL 通道數 16 Bits 數位輸入(DI)
輸入等級 TTL
三.線性壓電陶瓷馬達:
本研究使用以色列 Nanomotion 公司所發展之線性壓電陶瓷馬達為受控 體,型號為 HR4,此型馬達輕薄短小,其功能及特色均非傳統電磁馬達所能 望其項背,在直線及旋轉運動上,均能達到奈米級之精密定位,如表 5-2 所 示為其規格表。
表 5-2 HR4 線性壓電陶瓷馬達之規格[32]
最大速度(mm/sec) 250 動態推力(N) 15~18
靜態保持力(N) 14
解析度(nm) 5
剛性(N/µ) 2.3~2.8 施於滑座的預力(N) 72 額定電壓(Vrms) 270 額定電流(Arms) 0.32
額定功率(W) 15
驅動頻率(kHz) 39.6 工作溫度(oC) 0~50
重量(g) 73
正常使用下之壽命(hr) 20000 四.馬達驅動器:
採用以色列 Nanomotion 公司所發展之 AB1 馬達速度驅動器,其規格為 類比輸入電壓:±10V,輸出電壓:可達 270Vrms 之 39.6kHz 交流訊號,電 源:+48VDC。透過驅動器可以提供壓電陶瓷馬達所需之工作電壓,如圖 5-6 所示,為 AB1 驅動器的輸入電壓對 HR4 壓電陶瓷馬達速度之關係曲線。當
輸入電壓約在-1.5V~1.5V 之間,壓電陶瓷馬達將不運作,稱為壓電陶瓷馬達 之不工作區間(Dead Zone)此為一非線性現象。
圖 5-6 輸入電壓對速度之關係曲線[32]
五.光學尺:
光學尺負責壓電陶瓷馬達的位置感測,採用義大利米蘭 GIVI 公司所生 產之反射型光學尺,型號為 NCH-W10 05VL M01SC,精度為 1µm。
5.3 實驗結果
本研究所設計之模糊可微分小腦模型控制器(FDCMAC)是以程式語 言 Turbo C++來完成控制程式,取樣週期為 1msec。為避免線性壓電陶瓷馬達 因速度過快而造成每一取樣週期內所取得之滑動平台行進間距太大,不易達 到精密位置控制,因此限制輸入命令電壓在±5V。在實驗開始之前,必須先 將滑動平台置於原點,之後才開始實驗。本實驗設計二種不同之輸入命令,
且輸入命令必須經過參考模式才是真正的輸入訊號,其一為週期性步階命 令,振幅為 3cm,並選擇一個上升時間(Rise Time)為 0.45sec 的二階轉移 函數作為參考模式(Reference Model)[28]:
2
2 2 2
73.36
2 17.13 73.36
n
n n
s s s s
ω =
+ ζω + ω + + (5-1)
其中s表示 Laplace 運算子,ζ表示阻尼比(Damping Ratio),ωn表示無阻尼 自然頻率(Unadmped Natural Frequency);其二為週期性弦波命令,振幅為
±3cm,參考模式設為 1。此外,提供二種不同的負載來測試控制器的強健 性,一種為參數不變動情況下,即不另加負載;另一種為參數變動情況下,
即在滑動平台上增加 3Kg 的砝碼。DCMAC 之相關參數設定如下:
1. 學習範圍:每軸之學習範圍為[-5 5]。
2. 學習率:α = α = α = α =v σ m 0.04。
3. 量化大小:每軸切割成 100 個不連續小單元。
4. 類化大小:一個完整的區段含有 20 個不連續小單元,即Ne=20;每個 量化層含有 5 個區段,即Nb =5。
5. 總記憶體需求量:5Nh = ×5 Nb×Nb×Ne =2500個。
6. 初始化設定值:記憶體權值設為 0,高斯函數標準差設為 0.3,高斯函 數中心值設為各超立方塊中心點座標。
7. 參考輸入:輸入為週期性步階命令時,每個週期有 5000 次取樣點;輸 入為週期性弦波命令時,每個週期有 4000 次取樣點。
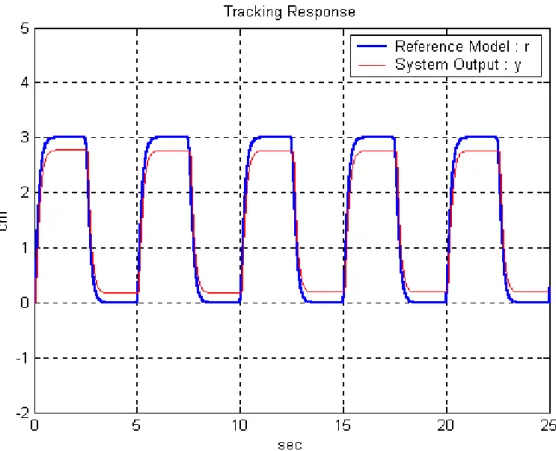
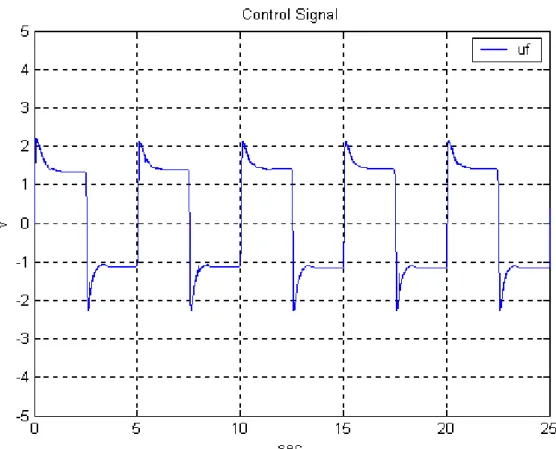
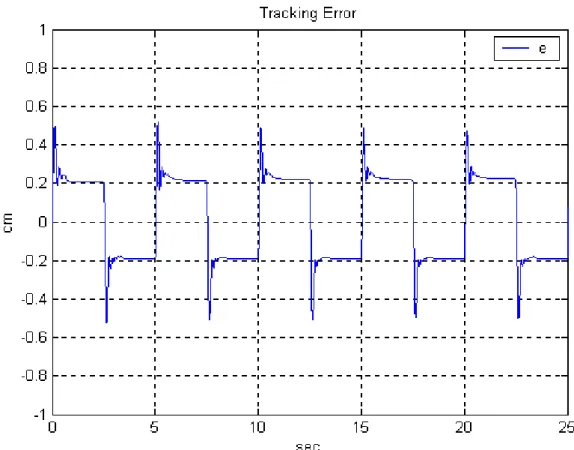
如圖 5-7 所示為 FLC 對週期性步階命令在參數不變動情況下之實作結 果,其中(a)、(b)、(c)分別為系統響應、追蹤誤差及控制訊號;如圖 5-8 所 示為 FLC 對週期性步階命令在參數變動情況下之實作結果,其中(a)、(b)、
(c)分別為系統響應、追蹤誤差及控制訊號。由圖 5-7(b)及圖 5-8(b)中所示的 追蹤誤差,均可以看出 FLC 存在約 0.24cm 的穩態誤差,造成系統響應特性 不佳,這說明了 PD 型 FLC 先天上就有穩態誤差的缺點。
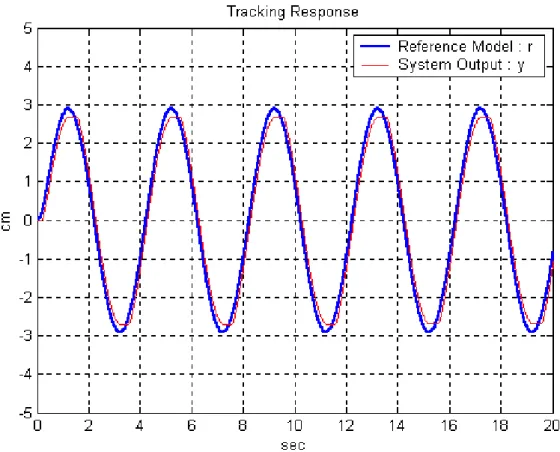
如圖 5-9 所示為 FLC 對週期性弦波命令在參數不變動情況下之實作結 果,其中(a)、(b)、(c)分別為系統響應、追蹤誤差及控制訊號;如圖 5-10 所 示為 FLC 對週期性弦波命令在參數變動情況下之實作結果,其中(a)、(b)、
(c)分別為系統響應、追蹤誤差及控制訊號。由圖 5-9(b)和圖 5-10(b)中所示的 追蹤誤差,表示 FLC 在輸入弦波命令下亦存在過大的追蹤誤差。另外,由 圖 5-8(c)和圖 5-10(c)中所示的控制訊號,可以看出滑動平台加上 3Kg 的砝碼 後,使得控制訊號出現些微的切跳現象,此切跳現象若嚴重的話,將容易造 成機構損壞。
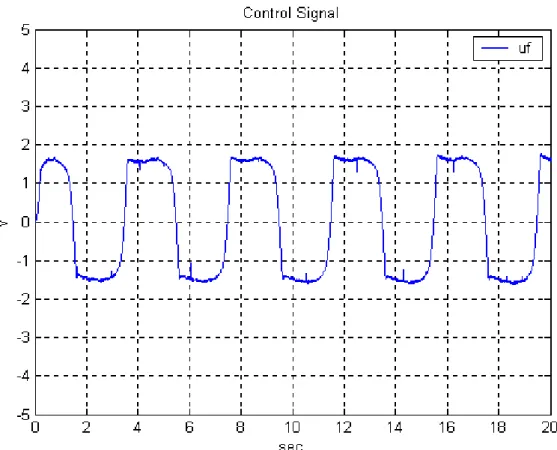
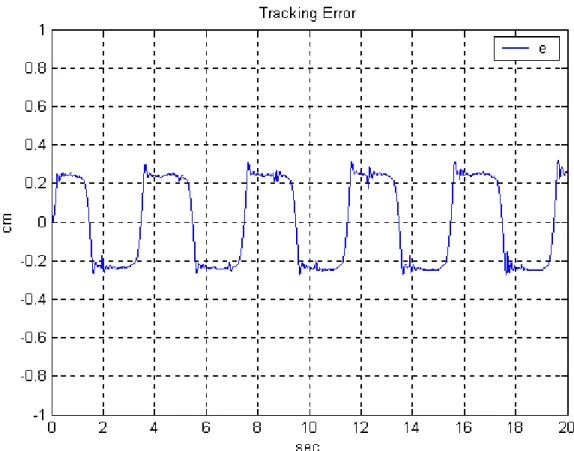
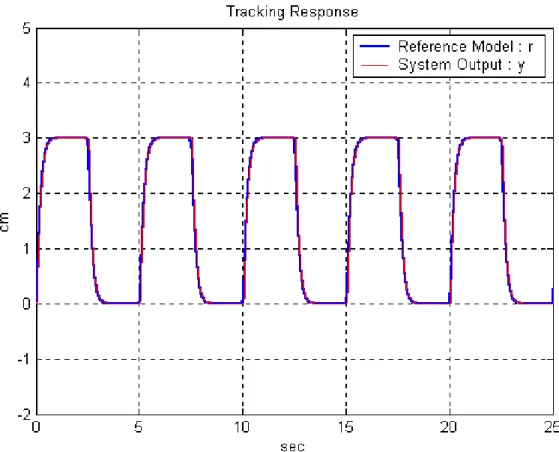
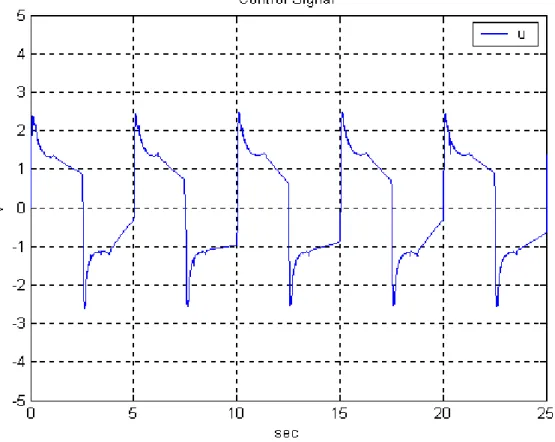
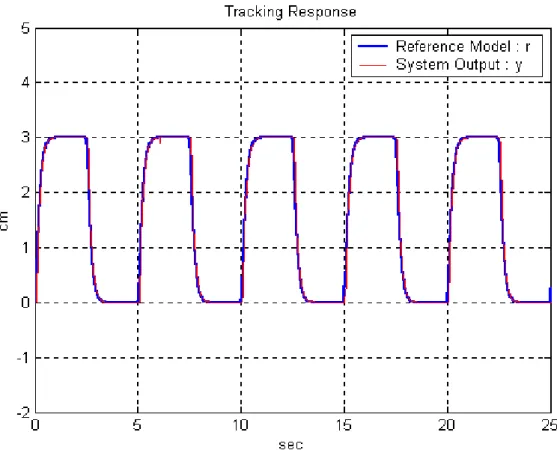
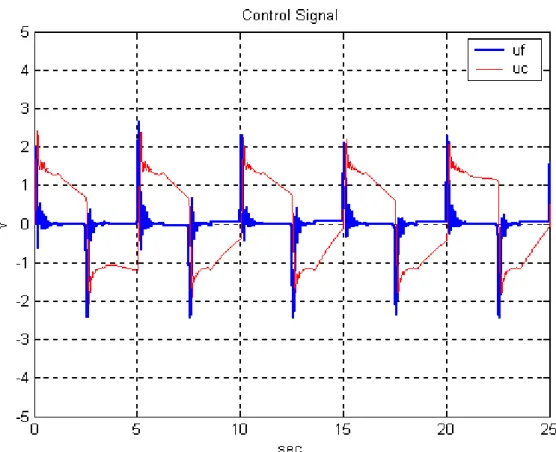
如圖 5-11(a)、(b)、(c)和(d)所示分別為 FDCMAC 對週期性步階命令在 參數不變動情況下之系統響應、追蹤誤差、控制訊號uf 與uc及控制量u;如 圖 5-12(a)、(b)、(c)和(d)所示分別為 FDCMAC 對週期性步階命令在參數變 動情況下之系統響應、追蹤誤差、控制訊號uf 與uc及控制量u。由圖 5-11(b) 及圖 5-12(b)中所示的追蹤誤差,可以看出 FDCMAC 無論是在參數不變動或 是參數變動情況下,均能有效地消除穩態誤差,使得控制系統擁有良好的系 統響應特性。
如圖 5-13(a)、(b)、(c)和(d)所示分別為 FDCMAC 對週期性弦波命令在 參數不變動情況下之系統響應、追蹤誤差、控制訊號uf 與uc及控制量u;如 圖 5-14(a)、(b)、(c)和(d) 所示分別為 FDCMAC 對週期性弦波命令在參數變 動情況下之系統響應、追蹤誤差、控制訊號uf 與uc及控制量u。由圖 5-13(b) 和圖 5-14(b) 中所示的追蹤誤差,可知 FDCMAC 對於弦波命令亦能大幅地 減少追蹤誤差。另外,由圖 5-12(d)和圖 5-14(d)中所示的控制量u,可以觀 察出 FDCMAC 在參數變動情況下的控制量u只會有輕微的切跳現象產生,
顯示其擁有良好的強健性。
最後,分別將 DCMAC 之學習率α設定為 0.02 和 0.08 來觀察學習率對 於誤差收斂情形之影響。圖 5-15 為 FDCMAC 對週期性步階命令在參數不變 動及學習率α =0.02情況下之追蹤誤差,圖 5-16 為 FDCMAC 對週期性步階 命令在參數不變動及學習率α =0.08情況下之追蹤誤差,圖 5-17 為 FDCMAC
對週期性弦波命令在參數不變動及學習率α =0.02情況下之追蹤誤差,圖 5-18 為 FDCMAC 對週期性弦波命令在參數不變動及學習率α =0.08情況下 之追蹤誤差。實驗結果顯示,當學習率較小時,將會使得系統追蹤誤差收斂 速度變慢;當學習率較大時,將會使得系統追蹤誤差收斂速度變快。
綜合上述的實驗結果,吾人所設計的 PD 型 FLC 已能符合基本的控制要 求,且在參數變動情況下,亦具有不錯的強健性;惟其追蹤誤差過大,無法 達到精確控制;而加入 DCMAC 後,使得 FDCMAC 可以迅速且有效地降低 追蹤誤差,大幅地提昇控制精確度,使得控制系統擁有良好的系統響應及強 健性。
圖 5-7(a) FLC 之系統響應(步階命令且參數不變動情況下)
圖 5-7(b) FLC 之追蹤誤差(步階命令且參數不變動情況下)
圖 5-7(c) FLC 之控制訊號(步階命令且參數不變動情況下)
圖 5-8(a) FLC 之系統響應(步階命令且參數變動情況下)
圖 5-8(b) FLC 之追蹤誤差(步階命令且參數變動情況下)
圖 5-8(c) FLC 之控制訊號(步階命令且參數變動情況下)
圖 5-9(a) FLC 之系統響應(弦波命令且參數不變動情況下)
圖 5-9(b) FLC 之追蹤誤差(弦波命令且參數不變動情況下)
圖 5-9(c) FLC 之控制訊號(弦波命令且參數不變動情況下)
圖 5-10(a) FLC 之系統響應(弦波命令且參數變動情況下)
圖 5-10(b) FLC 之追蹤誤差(弦波命令且參數變動情況下)
圖 5-10(c) FLC 之控制訊號(弦波命令且參數變動情況下)
圖 5-11(a) FDCMAC 之系統響應(步階命令且參數不變動情況下)
圖 5-11(b) FDCMAC 之追蹤誤差(步階命令且參數不變動情況下)
圖 5-11(c) FDCMAC 之控制訊號uf 與uc(步階命令且參數不變動情況下)
圖 5-11(d) FDCMAC 之控制量u(步階命令且參數不變動情況下)
圖 5-12(a) FDCMAC 之系統響應(步階命令且參數變動情況下)
圖 5-12(b) FDCMAC 之追蹤誤差(步階命令且參數變動情況下)
圖 5-12 (c) FDCMAC 之控制訊號uf 與uc(步階命令且參數變動情況下)
圖 5-12 (d) FDCMAC 之控制量u(步階命令且參數變動情況下)
圖 5-13(a) FDCMAC 之系統響應(弦波命令且參數不變動情況下)
圖 5-13(b) FDCMAC 之追蹤誤差(弦波命令且參數不變動情況下)
圖 5-13(c) FDCMAC 之控制訊號uf 與uc(弦波命令且參數不變動情況下)
圖 5-13(d) FDCMAC 之控制量u(弦波命令且參數不變動情況下)
圖 5-14(a) FDCMAC 之系統響應(弦波命令且參數變動情況下)
圖 5-14(b) FDCMAC 之追蹤誤差(弦波命令且參數變動情況下)
圖 5-14(c) FDCMAC 之控制訊號uf 與uc(弦波命令且參數變動情況下)
圖 5-14(d) FDCMAC 之控制量u(弦波命令且參數變動情況下)
圖 5-15 FDCMAC 之追蹤誤差(步階命令、參數不變動且α =0.02情況下)
圖 5-16 FDCMAC 之追蹤誤差(步階命令、參數不變動且α =0.08情況下)
圖 5-17 FDCMAC 之追蹤誤差(弦波命令、參數不變動且α =0.02情況下)
圖 5-18 FDCMAC 之追蹤誤差(弦波命令、參數不變動且α =0.08情況下)