國立臺東大學體育系所 碩士論文
指導教授:陳秀惠 先生
同時性視覺回饋對平衡技能 學習過程的影響
研究生:黃曉穗 撰
中華民國九十七年一月
國立臺東大學體育系所 碩士論文
同時性視覺回饋對平衡技能 學習過程的影響
研 究 生:黃曉穗 撰
指導教授:陳秀惠 先生
中華民國 九十七年一月
謝 誌
繞過半個台灣,來到另一個與過去全然不同的生活型態與步調,台東。從 開始到結束,一直接受許多人的幫助,在我茫然、困頓的時候,很感謝指導教授 陳秀惠老師,以穩健的作風幫我渡過每一個關卡;從文獻的閱讀、儀器的學習、
平衡實驗的進行,到資料的分析與撰寫等等,感謝老師總是敞開研究室的大門,
給予我充分的時間討論,使我逐漸的建構出方向,這段過程中,我相信學習的不 僅僅是書本中的知識,從老師身教中,我看見更多,屬於學者有的風範。
感謝劉有德老師以多面向的思考角度給予許多研究的寶貴經驗,以及溫卓謀 老師在百忙之中悉心親切的指導,此外,感謝陳漢棟老師、王明泉老師在實驗參 加者的找尋過程中,給予我許多的支持和鼓勵,以及每一位幫助我進行實驗的參 加者。另外,謝謝在過程中一直給予我鼓勵的雯芳、實驗室裡一起奮鬥的阿布,
幫助我解決困惑的道雄,以及研究所的每一位同學和實驗室的學弟們,謝謝你們 這段時間的陪伴,東大體育系給了我ㄧ個良好的學習環境。最後,謝謝一路支持 我的家人,願你們與我ㄧ起分享這份成長的喜悅。
黃曉穗 僅誌 民國九十七年一月
同時性視覺回饋對平衡技能學習過程的影響
摘 要
Schmidt (1988) 指出回饋與練習是影響動作技能學習的兩大變項,但是如何在 運動的過程中利用同時性回饋訊息來幫助學習尚未獲得一致性的結論。本研究旨在 探討同時性視覺回饋(以下簡稱CVF)是否具有引導學習目標技能的效果,以及經過 不同的相關目標技能練習後,是否會影響CVF的學習效果,並進一步探討在過程中 行為的改變。實驗過程以32位女性大學生為參加者,分為有CVF(T組)與無CVF
(C組),操作20回合,每回10次,每次30秒的動態平衡板連續水平站立練習,10回 平衡練習後,依平衡時間進行同質分組,T組分為兩組,第一組持續保持T組練習方 式(TT組),第二組由T組轉以C組練習的方式(TC組);C組分為兩組,第一組持續 試做C組練習的方式(CC組),第二組由C組轉為T組的練習方式(CT),分別記錄 每次練習與遷移測驗的平衡測驗的時間、頻率、幅度,以二因子混合設計變異數分 析(組別 x 回合)檢驗組別與回合間的效果。結果顯示經過練習各組均有顯著的進 步,在平衡時間部分,交互作用在前後十回的學習中分別達顯著差異(F=2.27*、 F=2.04*);C組在第三回遷移測驗表現優於T組,而在第11、12和13回中,則出現TT、
CT、CC、TC的優劣順序。在平衡板擺動幅度部分,經過練習各組於皆明顯的降低 (F=6.55*)。經上述研究結果得知,CVF對於學習全身性平衡技會因不同的經驗帶來 不同的影響,對於有平衡經驗的學習者只能帶來短暫的幫助,無法提升現有的學習 而CVF學習者初期會有較好的表現,但在移除時會出現拐杖效應,且會以較多的擺 動方式來維持平衡。
關鍵詞:平衡、同時性回饋、視覺
The effect of concurrent visual feedback information on the process of learning the balancing skill
Abstract
Schmidt (1988) mentioned that practice and feedback are two of the most important factors influencing motor learning. However, the studies about how the concurrent feedback information affects motor skill acquisition have not shown consistent results.
The purposes of this study were to understand whether the concurrent feedback information (CVF) with the effect of guidance the learning process and whether the experience of similar task enhanced balance skill learning.Thirty two female college students participated this study and been divided into two groups of CVF (group T) or no CVF (group C). They practiced the task of standing on a dynamical balancing board of 30 seconds per trial for 20 trials in one sets and totally for 10 sets. After practiced for 10 sessions, each of the groups was divided into two groups with a half remained original task (TT and CC) and the others (TC, CT) transferred to the task of the compared group.
The balance time, the frequency and the amplitude for each trial were collected for analysis. Two way ANOVA with repeated measurements (group * stage) showed that all the participants of groups improved their skill after practice. For balancing time, significant interactions were found both in session 1-10 and session 11-20 (F=2.27*, F=2.04*). The simple main effect revealed that group C performed better than group T in session three and the order for superior groups were TT, CT, CC and TC respectively in session 11, 12 and 13. The oscillation amplitude of balancing board decreased significant (F=6.55*). .CVF has different influence due to different experience. Be unable to improve existing study of not using CVF learner, only bring transient effect. Used CVF learners to have better behavior in initial stage, and maintain the balance by way of more swing, but will appear the guidance effect while taking away CVF.
Keywords: balance, concurrent feedback, visual
目 錄
中文摘要··· Ⅰ 目次··· Ⅱ 附錄··· Ⅲ 表次··· Ⅳ 圖次··· Ⅴ
第一章 緒論... 1
第一節 研究背景... 1
第二節 研究問題與假設... 3
第三節 名詞解釋... 3
第四節 研究範圍與限制... 4
第二章 文獻探討... 5
第一節 運動技能學習相關理論... 5
第二節 平衡的理論基礎與動作表現... 11
第三節 回饋... 22
第三章 研究方法與步驟... 26
第一節 實驗參加者... 26
第二節 實驗流程... 26
第三節 實驗設計... 27
第四節 實驗儀器與場地佈置... 28
第五節 資料蒐集與處理... 32
第四章 結果... 36
第一節 同時性視覺回饋的學習結果... 36
第二節 同時性視覺回饋經驗對學習過程的影響... 44
第五章 討論... 57
第一節 同時性視覺回饋與學習效果... 57
第二節 同時性視覺回饋的經驗與學習過程... 60
第三節 建議... 63
參考文獻... 64
中文文獻... 64
英文文獻... 66
附錄一 實驗參加者同意書... 72
表次
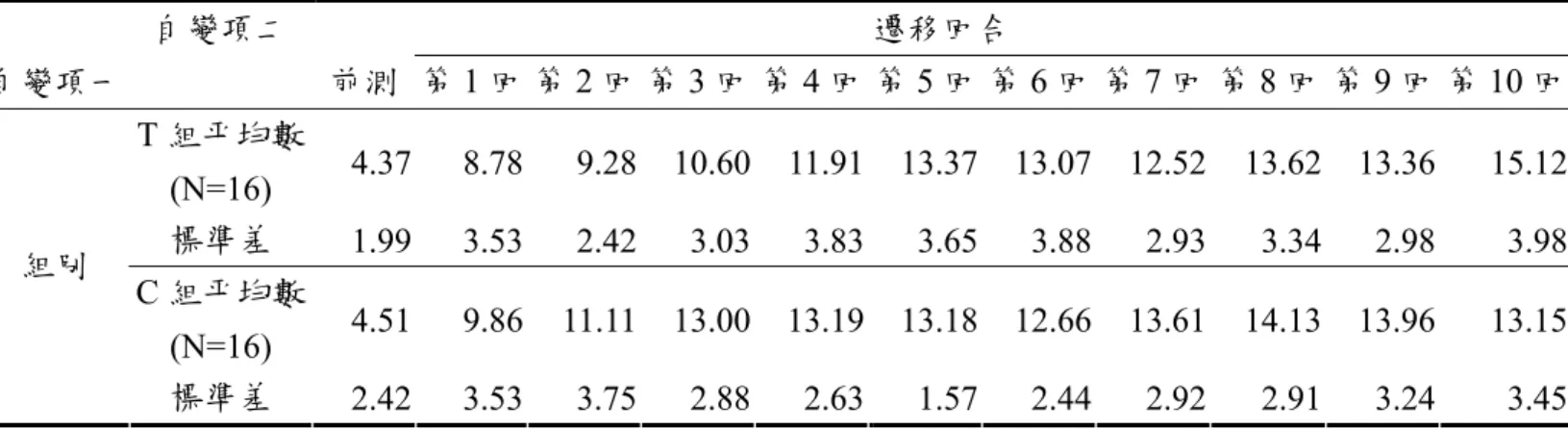
表 4-1-1 第 1-10 回遷移平衡時間描述統計 ... 37
表 4-1-2 第 1-10 回平衡時間變異數分析摘要報表 ... 37
表 4-1-3 第 1-10 回遷移平衡時間-回合-單純主要效果事後比較摘要表 ... 38
表 4-1-4 T組第 1-10 回遷移回合時間單純主要效果遷移顯著差異表 ... 38
表 4-1-5 C組第 1-10 回遷移回合時間單純主要效果遷移顯著差異表 ... 38
表 4-1-6 第 11-20 回遷移平衡時間描述統計量 ... 40
表 4-1-7 第 11-20 回平衡時間變異數分析摘要表 ... 40
表 4-1-8 第 1-10 回遷移平衡頻率描述統計量 ... 41
表 4-1-9 第 1-10 回平衡頻率變異數分析摘要報表 ... 41
表 4-1-10 第 1-20 回遷移平衡頻率描述統計量 ... 42
表 4-1-11 第 11-20 回平衡頻率變異數分析摘要報表 ... 42
表 4-1-12 第 1-10 回遷移平衡幅度描述統計 ... 43
表 4-1-13 第 1-10 回平衡幅度變異數分析摘要報表 ... 43
表 4-1-14 第 1-20 回遷移平衡幅度描述統計量 ... 44
表 4-1-15 第 1-20 回平衡幅度變異數分析摘要報表 ... 44
表 4-2-1 第 1-10 回練習平衡時間描述統計量 ... 45
表 4-2-2 第 1-10 回練習平衡時間變異數分析摘要報表 ... 46
表 4-2-3 第 11-20 回練習平衡時間描述統計量 ... 47
表 4-2-4 第 11-20 回平衡時間變異數分析摘要報表 ... 48
表 4-2-5 第 11-20 回練習平衡時間-組別-單因子變異數分析事後比較摘要表 . 48 表 4-2-6 第 11-20 回平衡時間-練習回合-單純主要效果事後比較摘要表 ... 49
表 4-2-7 TT組第 11-20 回練習回合時間單純主要效果遷移顯著差異表 ... 49
表 4-2-8 TC組第 11-20 回練習回合時間單純主要效果遷移顯著差異表 ... 50
表 4-2-9 CT組第 11-20 回練習回合時間單純主要效果遷移顯著差異表 ... 50
表 4-2-10 CC組第 11-20 回練習回合時間單純主要效果遷移顯著差異表 ... 51
表 4-2-11 第 1-10 回練習平衡頻率描述統計量 ... 51
表 4-2-12 第 1-10 回平衡頻率變異數分析摘要報表 ... 52
表 4-2-13 第 1-20 回練習平衡頻率描述統計量 ... 52
表 4-2-14 第 11-20 回平衡頻率變異數摘要報表 ... 53
表 4-2-14 第 1-10 回練習平衡幅度描述統計量 ... 53
表 4-2-16 第 1-10 回平衡幅度變異數分析摘要報表 ... 54
表 4-2-17 第 1-10 回遷移平衡時間-組別-單純主要效果事後比較摘要表 ... 54
表 4-2-19 第 1-20 回練習平衡幅度描述統計量 ... 55
表 4-2-20 第 11-20 回平衡幅度變異數分析摘要報表 ... 56
圖 次
圖 2-1-1 Adams 閉鎖環理論 ... 6
圖 2-1-2 穩定與不穩定的吸引子 ... 9
圖 2-1-3 Newell(1986)三角限制模式 ... 10
圖 2-2-1 姿勢控制控制圖 ... 12
圖 2-2-2 運動控制的中樞神經系統 ... 13
圖 2-2-3 訊息處理概略圖 ... 16
圖 2-2-4 知覺建構學說與直接學說 ... 17
圖 2-2-5 四種常見的自動化姿勢策略 ... 18
圖 2-2-6 人類訊息進行的程序 ... 19
圖 2-3-1 回饋的種類 ... 22
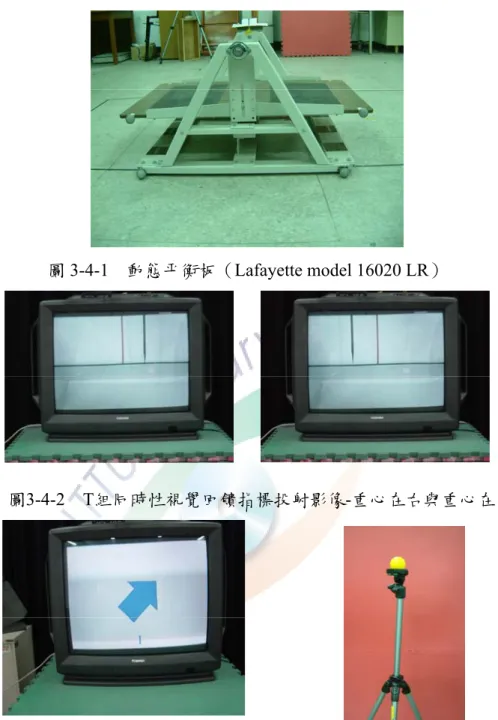
圖 3-4-1 動態平衡板 ... 29
圖 3-4-2 T組同時性視覺回饋指標投射影像-重心在右與重心在左 ... 29
圖 3-4-3 T組與C組立即遷移、延遲測驗內容 ... 29
圖 3-4-4 C組目標物 ... 29
圖 3-4-5 高速攝影機 ... 29
圖 3-4-6 平衡板與電視機位置 ... 30
圖 3-4-7 平衡板與C組目標物的位置 ... 30
圖 3-4-8 數位攝影機投影擺設方式-正拍 ... 31
圖 3-4-9 數位攝影機投影擺設方式-側拍 ... 31
圖 3-4-10 實驗參加者與高速攝影機 1 號、2 號的放置位置... 31
圖 3-4-11 場地示意圖 ... 32
圖 4-1-1 第 1 階段平衡時間過程曲線圖 ... 36
圖 4-1-2 第 11-20 回平衡時間過程曲線圖 ... 39
圖 4-2-1 第 1-10 回平衡時間過程曲線圖 ... 45
圖 4-2-2 第 11-20 回平衡時間過程曲線圖 ... 47
圖 5-1-2 四組立即遷移測驗平衡頻率 ... 59
圖 5-2-2 T組練習與遷移差異過程圖 ... 61
圖 5-2-3 C 組練習與遷移差異過程圖... 61
圖 5-2-4 TT組練習與遷移差異過程圖 ... 62
圖 5-2-5 TC 組練習與遷移差異過程圖... 62
圖 5-2-6 CT組練習與遷移差異過程圖 ... 62
圖 5-2-7 CC 組練習與遷移差異過程圖... 62
圖 5-2-8 四組練習過程平衡頻率 ... 63
圖 5-2-9 四組練習過程平衡幅度 ... 63
第一章 緒論
第一節 研究背景
在日常生活中,不論是靜態或動態的活動,平衡控制是影響動作表現相當重要 的基本技能 (Massion & Woollacott, 1996),其中,平衡是姿勢控制當中重要的ㄧ環,
而姿勢控制包含在空間中控制身體的方向和身體的穩定度 (Shumway-cook,2007)。
維持身體姿勢穩定性的能力對於流暢的完成肢體動作相當重要,不僅只是包含站立 與行走,上下樓梯與用手提物等日常動作的施行都需要姿勢的穩定,運動場上的移 動、投籃、揮擊、接傳等技巧表現也源於姿勢的穩定。影響平衡的機制包括三種:
一、感覺系統:提供個體重力中心與重力作用相關位置的訊息,二、運動系統:提 供自主動作與重力中心位置變化的關係,並啟動個體改變與修正肢體位置,以使重 力中心重回穩定位置以維持個體重心平衡,三、中樞神經系統:整合與協同肢體動 作、肌肉收縮及平衡策略,以維持身體姿勢平衡控制的協調與穩定性 (Lord,Clark,
&Webster, 1991)。感覺系統中的視覺在平衡的控制當中,扮演著重要的角色。樓迎 統(1994)指出視覺可偵測身體的位置以維持身體的平衡,Loran與MacEwen (1997) 提出運動員視覺能力的優劣對運動表現有很大的影響。Lee (1978) 指出透過不同知 覺管道所獲得的訊息是造成運動行為改變的重要因素,其中又以視覺對運動有最大 的影響,因此視覺又有「外在本體覺」之稱。運動中的視覺訊息無所不在,視覺又 是如何影響平衡呢?
在動作控制中,訊息的處理分為閉鎖控制(close loop)與開放控制(open loop),閉 鎖控制用於動作過程中,經由修正迴路對動作進行調整;開放控制在動作開始前,
會先發佈計畫,接著完成動作。從過去Collins與Luca (1993) 在靜態平衡站立的研究 中得知,未接受外界干擾的情況下,主要是以閉鎖控制做為平衡控制的方式,視覺 回饋的加入,對於動態平衡控制有不同的影響,以平衡的維持時間做為區分,開放 控制的平衡方式主要應用於平衡控制初期的調整,需要長時間調整的平衡控制則仰 賴閉索環式控制方式。從本研究的動作目標來看,平衡板的調整屬於全身性協調動
作,而平衡板的姿勢調整往往是一瞬間的重心變化,在快速的重心改變過程中,學 習者該如何經由本體感覺或者是視覺等其他知覺修正平衡。
從生態心理學角度來看,訊息是直接從環境中反應及知覺,不須經由轉換及計 算,可以直接由訊息知覺而產生動作行為,個體接收到何種訊息會憑藉自我經驗,
知覺環境所賦予的訊息,選擇對於動作有利的訊息進而產生出動作。Stoffregen
(2000)指出個體對環境中事物的訊息,產生知覺或動作反應,這些動作反應及知 覺會隨著個體的經驗不同而有不同的知覺及動作反應產生。既然訊息會直接在動作 中被知覺到,那麼藉由視覺產生同時性回饋是否對於學習目標技能具有引導效果 呢?從過去同時性回饋的研究來看,可以發現同時性回饋對於學習有不同的研究結 果,在Swinnen, Walter, Lee, and Serren (1993) 學習兩手協調的實驗中,顯示同時性 回饋不止提升「練習中」的表現有幫助,也在保留測驗中也呈現學習效果,由此過 去 研 究 得 知 同 時 性 回 饋 對 於 學 習 有 著 不 同 的 效 果 。 然 而 , 在Verschueren, Swinnene,Dom,& DeWeerdt (1997) 的畫橢圓實驗中,練習時期,有無同時回饋的兩 組成績出現顯著的進步情形,但在保留測驗的時候,同時回饋組在成績上卻有顯著 性的滑落。Winstein (1996) 在力量分配實驗中也提出同時性回饋有利於動作的執 行,卻不利於動作的學習。研究者將同時性回饋無法在移除後繼續維持或者促進表 現的情形,解釋為「柺杖效應」。雖然同時性回饋在過去的研究中有著不同的結果,
但由於過去的技能類型不同,是否會因此產生不同的學習效果也有待探討。其次,
在過去的研究中,每位研究者多以不同的測量方式作為有無學習效果的判斷,其中 最多的測量方式,是以結果作為學習效果的評斷標準,然而,學習者學習過程的變 化情形,也是不容忽視的一部份,最後,在過去研究中,不乏有許多是從前學習過 的動作(例如劃線),而非學習全新的協調型態作為動作項目。無論是藉由不同方式 測量結果、過去曾經習得的相關技能,以及忽略學習過程的變化情形,都有可能導 致我們對同時性回饋效果有不同的評價。因此本研究以二十回練習遷移測驗探究學 習過程的變化情形,以全身性協調動作做為動作型態,希望進一步了解同時性回饋 對學習帶來的影響效果。
第二節 研究問題與假設 一、研究問題
基於前述的理論背景與實証研究,本研究擬從視覺訊息的操弄和平衡技能的習 得過程兩方向探討下列三項問題:
(一)同時性視覺回饋是否影響全身平衡技能學習?
(二)同時性視覺回饋對全身平衡技能之影響是否因經驗之有無而不同?
(三)同時性視覺回饋如何影響全身性平衡技能的學習過程?
二、研究假設
基於上述研究問題,本研究假設如下:
(一)同時性視覺回饋會影響全身平衡技能學習。
(二)同時性視覺回饋對全身平衡技能之影響會因經驗之有無而不同。
(三)接受同時性視覺回饋者,在不同學習階段會出現不同的情況。
第三節 名詞解釋 一、同時性回饋
同 時 回 饋 指 的 是 當 一 個 人 在 表 現 一 項 技 能 或 做 動 作 同 時 就 給 予 回 饋 , (Magill,2004)。本研究所指的同時性回饋是指在操作平衡技能的過程,藉由視覺作 為同時接收回饋的方式,進而修正平衡。
二、平衡
一般性的平衡技能是指人體重心保持在一定的身體基底(base of support)範圍內 的能力,也就是維持身體重力中心(COG)在一支撐面的能力(Nashner,1993)。平衡技 能共分成姿勢平衡、靜態平衡、動態平衡、技巧平衡四種。本研究平衡是指參加者 站立在動態平衡儀,在操作過程中將動態平衡儀維持在正負5度範圍內的平衡動作。
三、學習過程
學習是透過經驗或練習,造成行為上長久性改善的過程;技能的純熟是受到內 在持續的變化而產生的外在表現(Magill, 1998)。本研究所指的學習是在操作動態 平衡儀時,藉由測量平衡時間、頻率、幅度所產生外在表現的持續變化。
第四節 研究範圍與限制
一、在本實驗中,視覺回饋是指學習者在過程中所接受的同時性視覺回饋指標, 其 餘外在週遭的視覺影像不列在視覺回饋的範疇。
二、本研究學習者限定在大學女學生,身體活動功能與視覺能力正常,排除不同 性 別與身體活動功能異常者的學習情況。
三、本研究學習者休息的間隔時間限制在三天~半小時以內,超過三天者或少於 半小時休息時間的學習者資料不採列。
第二章 文獻探討
第一節 運動技能學習相關理論 一、 閉鎖環理論(closed-loop theory)
1971年Adams提出閉鎖環理論(closed-loop theory),強調人類動作技能的表現主 要是受到閉鎖環系統所控制,藉由正確參考值進行錯誤的偵測,再以回饋不斷的來 回修正,最後經由適當的修正動作誤差達成動作目標。閉鎖環理論指出動作過程中,
有兩種裝置幫助動作的產生,一種是用來產生動作的記憶痕跡 (memory trace) ,記 憶痕跡會藉由過去的動作訊息啟動動作,當動作開始啟動執行之後,便會有另一個 知覺痕跡 (perceptual trace) 當做參考值,知覺痕跡是用來評價動作,藉由回饋引導 動作反應依正確軌跡進行,以達成動作目標,回饋會不斷地與正確的參考值作比較 並且修正動作,經由反覆的動作及回饋修正後達到完成動作之最終目標 (Adams, 1971)。如圖2-1-1。
閉鎖環理論在提出後雖然有許多研究支持Adams的理論(Christian & Merriman, 1977; Newell & Chew 1974; Roy& Marte-Martenerniuk,1974),但是閉鎖環理論只能針 對較慢的技能,當學習較快與較複雜的技能中,如果還要經過回饋的歷程,再選擇 動作參數才能夠產生技能表現,在時間上是來不及的(林清和,1996)。另外Lankin, Hebert,與Fairweather (1993) 指出閉鎖環理論無法解釋第一次動作的產生和變異練 習可以提高學習效果的現象,然而,在實際運動情境當中,許多動作技能學習的情 境是可以藉著變異練習提升運動技能。
圖2-1-1 Adams 閉鎖環理論(引自 林清和,1996 p305)
二、 基模理論(schema theory)
Schmidt在1975年提出基模理論概念改進Adams閉鎖環理論無法解釋變易練習 的缺點,所謂基模,是指一類事物的共同特徵,包括了一組原則,根據此原則可以 建立這一類事物的原型(林清和,1966)。基模理論主要是以運動程式的觀點解釋 動作的形成,認為中樞神經系統是行為的主要控制系統,只須經由已建立的基模中 尋找適當、類似的基模而產生動作。基模理論提到學習過程必須建立兩種基模,第 一種是回憶基模,第二種是再認基模,回憶基模主要負責動作的啟動,藉由過去動 作反應結果組成運動程式參數,在不同的練習情境,改變運動程式的參數,產生不 同的運動結果,若個體對某一類別的動作技能能夠建立穩固的回憶基模,在面對新 的運動情境時,便可根據回憶基模所提供的訊息決定動作參數,發展出新的動作。
再認基模主要是負責動作的控制,強調學習者在尚未完成動作前就依據預期的感覺 結果得知動作反應是否正確,也就是在過程中經由感覺的結果與最後之結果互相比 較,如果個體能建立穩固的再認基模,在面對新的反應情境時,便能夠以內在感覺 回饋預測、評估真實的外在動作結果,並可用來修正回憶基模(Schmidt, 1975)。
動作練習
知覺痕跡
執行動作 記憶痕跡 外界回饋
外界回饋
不斷修正
形成運動基模有四種訊息來源(林清和,1996):
(一)有效初始狀態訊息(initial condition)
一個動作要被執行,開始的狀況訊息必須要先瞭解,包括動作前身體的位置、
四肢的空間感、周圍環境的狀態與目標距離等訊息。
(二)有關產生動作反應的特定規格之訊息(response specification)
在執行某一動作時,有關肢體的方向、力量、速度、必須有其特定的規格或參 數,這些有相關的動作反應參數必須儲存。
(三)有關動作反應的感覺結果(sensory consequence)
對於動作反應的感覺結果通常發生在運動中或運動後,包括視覺的、聲音的、
本體感受器的回饋,例如對動作做起來的感覺如何,看起來及聽起來如何等訊息。
(四)有關動作反應結果訊息(response outcome)
也就是對動作結果的獲知,動作者被告知動作反應與真正動作間的差異。
上述四種訊息,經由不同情境不斷的反覆練習,最後能使四種訊息連結,以一 種抽象的方式表現出來,而連結的強度主要是依賴所接收訊息的量與質,量是指練 習的次數,質是指在練習過程中,動作練習的專注程度與回饋修正時的正確性,最 後產生動作類別的基模(林清和,1996)。
傳統認知心理學理論認為,訊息都須經由人的「中樞神經」系統處理過後,才 能產生有意義的訊息。閉鎖環理論依據動作產生之結果及動作過程之的知覺回饋來 進行動作學習,無法解釋新動作的產生過程。而基模理論對於新動作的產生雖然是 由類似的基模加以改正而形成新的基模,但在修正的過程與新基模形成的過程卻顯 得過於抽象。
三、 動力系統
動力系統與過去訊息處理理論不同的地方在於,動力系統不強調中樞神經對動 作控制與動作形成產生全然的主導性,也不認為中樞神經存在有既定的動作程式,
不認為大腦主宰一切,大腦的角色在動力系統中被認為是一個次系統,(Hopkins, 1993)。而動作的產生是由多重次系統交互作用所產生的結果,其中,中樞神經只是 參與決定動作的次系統之一(成戎珠,1994)。Schoner與Kelso (1988)指出每一個 次系統都能夠影響動作的發展,並非只有某一個特定的系統可以決定動力產生動 作;其中每個次系統的發展可視為是自我組織(self-organizing)的過程(廖庭儀,
2003)。
Thelen與Ulrich(1991)在孩童步行能力發展的實驗中指出,影響行走狀態的次系 統,包含下列八項:下肢動作型態產生、單關節控制能力、姿勢控制、視覺資訊、
張力控制、伸肌肌力、身體型態、動機,這些次系統間沒有主從的關係,在學習的 過程中相互作用,當次系統間都達到某個決定性的發展程度,孩童的步態動作就會 自 然 產 生 , 對 於 每 個 次 系 統 間 相 互 作 用 的 發 展 情 況 , 就 稱 為 自 我 組 織 (self-organizing)。
當所有的系統穩定在某一偏好,也就是較常出現、較穩定的結構,被稱為吸引 子,Abraham與Shaw(1992)定義吸引子為在狀態域(state field)中系統所偏好的狀態。
Haken等人(1985)的實驗中,以雙手食指做反相 (out-of-phase)的動作,也就是一手食 指內收時,另一手食指外展,當交替速度增加的時候,兩隻食指的方向會改變成同 相 (in-phase),此實驗中,反相的食指動作是一個吸引子,同相的食指動作是另一 個吸引子,而後者的吸引子比前者的吸引子穩定(胡名霞,2003)。Thelen與Smith(1993) 以位能來比擬吸引子的穩定性,圖2-1-2中,愈低的地方代表動作表現愈穩定,越高 的地方代表表現越不穩定,A.表示有極大的位能,所處的位置在一個不穩定的狀態,
如同學習一項新技能的表現狀態,此狀態動作容易改變,若施與某些外力(例如練 習),就會墜入一個吸引子,進入一個比較穩定的狀態;B.代表吸引子進入穩定的狀 態,也就是動作經由一段時間的練習之後,表現已經有相當的穩定性,即使有外在
因素,也不會影響其動作表現,若受到外在因素的影響,仍然有回到原本狀態的趨 勢。C.的吸引子狀態較B.不穩定,當學習出現C.吸引子的情況,轉移學習就變得相 當重要,轉移在動力系統中的解釋為不同吸引子間的轉換,動作表現經由練習、回 饋,使得動作技能從一個較不穩定的狀態轉移到較穩定的狀態,也就是從C.吸引子 的狀態轉移至B.吸引子狀態(廖庭儀,2003)。
圖2-1-2 穩定與不穩定的吸引子(引自 Thelen & Smith, 1993)
動力系統的假設認為,系統結構的改變與組成成分的變化不是線性的關係,當 組成成分到達某一個臨界點,控制參數小小的變動就能夠促使系統的結構改變成另 一個全新的形式(成戎珠,1994)。動作的學習是從一個穩定狀態轉移到另一個穩 定狀態的過程,因此轉移對於學習是極為重要的因素。Scholz, Kelso與Schoner (1987) 指出經由學習後,個體整體的學習景觀改變,而控制參數的改變方向不同時,其轉 移的位置也會有所不同,其中在轉移之前會有一關鍵的搖動(critical fluctuations),僅 需要極少的改變,就會進入轉移的模式(廖庭儀,2003)。
動 力 系 統 認 為 動 作 的 產 生 不 僅 止 受 限 於 中 樞 神 經 的 影 響 , 生 態 心 理 學 家 Gibson(1979)指出個體存在一個環境內,會與環境產生互動互補的關係,而互動互 補的關係乃是個體主動的去尋找有利於本身存在環境中的刺激。Newell(1986)指 出:個體最佳協調與控制能力型態是受有機體的限制(organismic constraints )、
環境限制(environmental constraints)與工作限制(task constraints)等三者交互作 用的影響,如下圖2-1-3。
A. B. C.
圖2-1-3 Newell(1986)三角限制模式
Newell(1986)的三角限制模式將動作協調的獲得由原本的刺激反應的結 構(stimulus response),改為受限制的影響,他從 Kugler、Kelso與Turvey(1982)的研 究中發現動作協調的產生不是受行動的命令,而是滿足於限制後的顯形。
(一)有機體限制
有 機 體 限 制 指 個 人 生 理 與 心 理 的 特 質 , 而 有 機 體 的 限 制 可 分 為 功 能 性
(functional)及結構性(structural)兩種。
1.結構性限制:結構性限制是指個體會隨著身體機能的成長、老化,或者生理 上的改變,而使一個人的動作行為產生變化,例如身高、體重、肌肉等身體結構變 化導致動作行為的改變。例如:李梅華(2004)研究指出,不同年齡層的嬰幼兒會 發展出不同的手部抓握動作,說明了個體因為生長改變結構,對動作所帶來的影響。
2.功能性限制:是指可以使個體動作在一定時間內改變的因素,如注意力、動 機、疲勞、經驗等,或者因疲勞、情緒而使得運動表現不佳的現象,以及有無學習 經驗而產生不同進步的情況(李梅華,2004)。
(二) 環境限制
環境限制主要是以有機體所處之外在環境加以限制而產生的作用。環境限制通 常容易與工作限制混淆,一般而言,環境限制對協調發展的較不容易被試驗,通常,
環境限制條件是實驗者沒操作的那些,相對時間是獨立的。環境限制包含有個體的 重力、自然狀態的溫度、光源等,如:在太空中與水中都是一種浮力,然而卻產生
個體
環境 工作
協調
不同型態的重力限制,或者不同哺乳動物在不同子宮環境內的發展,會使得有些動 物出生後便能在水中生存,有些則不能。
(三) 工作限制
工作限制條件的主要焦點是在於活動中的動作目標,工作限制有三個特性:一、
具有明確的動作目標,二、有確切的規則說明或者限制某些動力,三、使用指定工 具或者機械將某些動力改變或者限制。例如:抓取物體時,工具與機械的改變等、
蝶泳與蛙泳之間,不同泳姿的比賽規則、以及不同身高體重對於同樣球拍,所帶來 不同的物理限制。
第二節 平衡的理論基礎與動作表現
從事各種活動中,平衡能力與維持身體姿勢穩定是主要的基本能力,人類從出 生開始學習坐姿、站姿,ㄧ直到長大後學習各項運動技能,都需要運用到平衡控制 的能力,Haywood(1993)指出平衡控制能力並非是ㄧ般的能力,而是與特定的平衡 動作有關,若在某一種平衡動作的表現上良好,並不代表在另外一個平衡控坐上也 可以有相同的表現。從動力系統的觀點來看,動作學習的發展不單只是神精成熟的 作用,而是受到環境、工作與個體三者所共同影響,平衡動作也是如此,當三角限 制的條件因素改變時,有可能也會產生平衡控制型態的不穩定的現象。
一、平衡的理論基礎
平衡是指人體重心保持在一定的身體基底(base of support)範圍內的能力,也就 是維持身體重力中心(COG)在一支撐面的能力(Nashner,1993)。De Oreo & Keoch (1980)將平衡分成姿勢平衡 ( postural balance)、靜態平衡( static balance)、動態平衡 ( dynamic balance)、技巧平衡( skilled balance) 四種,姿勢平衡指身體與地球上重力 平衡關係的能力,一個人要維持平衡,支撐點必須在重心線上,否則,不是跌倒就 是必須要有立即的補救動作;靜態平衡指身體不動時,維持身體某種姿勢一段時間 的能力,如站立、單足站立、倒立、站在平衡木上維持不動,或(雙手)倒立動作,
皆屬靜態平衡;動態平衡,指身體在空間移動時,維持控制身體姿勢的能力,動作
中重心會不斷地改變,是移動性及操作性動作的主要因素。如彈簧床、特技、溜冰 與游泳等都需要這種平衡能力;技巧平衡,如體操運動員所表現出來的技巧性絕技 及結合複雜動作之平衡能力。另外,平衡包含了三個要素:1.穩定性:靜止時,維 持身體最小的搖晃程度。2.對稱性:靜止時,肢體兩側重量均衡分布。3.動態穩定性:
動作時,維持姿勢的平衡而不跌倒。
二、平衡的姿勢控制機制
Shumway-cook (2007) 指出,在空間中,控制我們身體姿勢的能力是做一切事 情的根本,所有的任務都需要姿勢控制,其中,動作的穩定度和方向是姿勢控制的 重要因素,姿勢穩定也被稱為平衡,亦是指一種以支撐點控制身體中心穩定性的一 種 能 力 , 而 穩 定 和 方 向 則 會 隨 著 每 個 任 務 而 改 變(Horak & Macpherson,1996;
Shurnway-Cook & McCollum,1990)姿勢控制會隨著工作任務與週遭環境的變化而改 變,例如:靜止的站立閱讀與站在移動的公車上閱讀,相對於坐在板凳上閱讀所需 要控制的穩定度就有所不同。此外,姿勢控制不是由單一的控制系統操控,而是由 許多系統相互影響的,個體的穩定及方向必須隨著任務和環境而變化,如下圖2-2-1 所示,以下將姿勢控制的影響分為生理機制與心理機制兩部份:
圖2-2-1 姿勢控制控制圖(修改自 Shumway-cook,2007)
(一)生理機制在姿勢控制影響 1. 神經系統:
人體的神經系統可分為中樞神經系統和周邊神經系統,而動作控制的形成就是 中樞神經系統和周邊神經系統互相整合的結果 (Vander,1998),中樞神經系統可分
工作
個體 環境
PC
姿勢控制
為大腦、間腦、腦幹、小腦、脊髓等,當有外界干擾時,這些刺激會經由體感覺、
視覺和前庭覺得接收,由脊髓上傳到大腦的非動作皮質區,經判斷後,再分別傳給 動作皮質區、基底核和小腦。動作皮質區在此扮演非常重要的角色,必須在接收訊 號 之 後 , 立 即 的 判 斷 要 做 哪 些 動 作 , 並 且 安 排 這 些 即 將 發 生 動 作 的 順 序 (Shumway-Cook & Woollacott,1995)。小腦雖不會引起主動性的運動,但在運動的 整合和學習、身體姿勢及平衡的控制上是一個重要的中樞。小腦接受肌肉、關節及 皮膚等體感覺,還有視覺、前庭覺及大腦及他參予運動的區域傳來的訊息。兩者整 合後的訊號全部彙整至腦幹,再經由脊髓控制肌肉的收縮,換言之,當人體受到外 界干擾時,會先由體感覺得到身體各肢段的相對位置及身體和腳所接觸地面的相對 位置,同時,前庭覺感受頭的速度、傾斜度及方向,視覺則提供外界環境的變化的 訊息。這三種感覺所得到的訊息會傳到小腦做整合及判斷,決定要做哪些動作、動 作的順序,再經由運動神經將訊號傳至肌肉骨骼系統,藉由肌肉的收縮來調整肢段 以恢復平衡 (Shumway-Cook & Woollacott,1995)。如圖2-2-2。
圖2-2-2 運動控制的中樞神經系統(引自Shumway-Cook & Woollacott,1995) 基底核
小 腦
本體感覺 視覺 內耳前庭系統
非動作皮質區
動作皮質
腦 幹
脊髓網路
肢段肌群 非動作皮質區
2.感覺系統:
在感覺系統的部份,可 以精確的協助接收到來自視覺(vision)、內耳前庭 (vestinular sense)與本體感(proprioception)等受器所輸入相關的身體姿勢訊息,使中 樞神經能正確的察覺與辨認身體中心與支撐面、重心與週遭事物相對的位置與關係 (Nashner, 1993)。人類為了要維持平衡,必須隨時知道身體環境之間的相互關係,以 使身體受外界干擾時,可以應用適當的方式來維持的平衡,在人體中,有三個對平 衡非常重要的感覺系統:(一)本體感覺系統,提供身體相對於外在環境的空間位置 及相關活動資訊,包含:關節內的觸覺感覺器官,皮膚內感覺神經、肌梭等,這些 皆有助於關節位置感覺與關節動作的訊息。例如:坐在列車上,常常會因為交錯列 車而使視覺產生被動位移的現象,誤認為火車已經駛動,這時本體覺就會藉由相對 空間位置來修正錯覺。(二)迷路前庭系統,提供頭部得知重力及慣性的變化資訊,
當接收視覺的訊息被干擾或者身體感覺輸入的訊息被阻斷時,內耳前庭對於平衡便 會顯得非常重要。(三)視覺系統,提供頭部在環境中垂直與水平的參考座標。藉 由測量週遭物體的方位,提供自我與目標的動作訊息。
3.運動系統
運 動 系 統(motor system) 包 含 肌 力 (muscle strength) 與 神 經 肌 肉 控 制 (neuromuscular control)。運動系統通常是指肌肉協調與動作模組的策略(motor straegy),當身體姿勢被外在干擾擾亂時,個體會依過去經驗與知覺訊息來產生適當 的身體姿勢控制,以平衡干擾的效果與影響,並恢復身體重心回到正常的平衡位置 與穩定性(Shumway-Cook, 1995)。
4.預期性姿勢:
在人體發生動作之前都會有姿勢的校正產生,此現象稱為預期(Massion,1992)。
姿勢校正分為正回饋(又稱為前饋式)和負回饋的姿勢校正。外來干擾造成肢體移 動而造成姿勢校正,此為正校正。人體因為正回饋做了反應後,再根據感知系統的 回饋做了其他肢體反應,此為負回饋。
預期性的姿勢校正的目的在於讓肢段在運動中保持穩定,使身體的重心落在穩 定極限範圍內。而在靜止或移動時,人必須將身體重心落在穩定極限範圍內才不會 跌倒(Goldie,1989)。人體穩定極限範圍會因每個人身高不同,重心(COG)的高度就 會不同,有學者指出正常人的穩定極限約為往前12度,往後4度,兩側各8度 (McCollum,1985)。
(二)心理機制在姿勢控制的影響 1.認知心理學:
認知心理學的概念,是將人體視為訊息處理器,不管是從外在獲得的訊息還是 從內在獲得的訊息,都必須經過大腦的處理加以編碼之後才產生動作,而動作產生 之後才會獲得回饋,進而對動作姿勢做進一步的修正。認知心理學的觀點認為,認 知處理在動作中扮演重要的角色,也就是說大腦處理一系列訊息的運作,如果沒有 大腦的各種編碼及計算,個體無法產生動作與調整姿勢,如果接收到訊息沒有經過 大腦的編碼及轉換,只是一堆抽象的符號,而沒有真正實質的意義。換言之,認知 心理學認為感官系統接收到的外在刺激並不具備任何的意義,個體知覺的產生都是 因為大腦的編碼、轉換之後,才成為真正察覺到的訊息,因此,大腦對於動作扮演 非常重要的角色,如下圖2-2-3。過去認知心理學的學習理論藉由輸入與輸出的運算 過程中得到許多有關學習的解答,認知心理學家支持知覺建構學說 (Williams, Davids, & Williams, 1992),在十九世紀後結構主義學者認為知覺的形成是由許多單 獨無意義的刺激感覺所組成,而這些刺激感覺只是紀錄物理量的特徵,刺激本身是 無 意 義 的 , 這 些 無 意 義 的 刺 激 必 須 經 由 與 組 合 之 後 才 有 意 義(Michaels & Carello,1981)。如下圖2-2-4,左邊的循環中,代表的是知覺建構學說從刺激進入到 動作產生的過程,刺激對於知覺建構學說是沒有意義的符號,這些符號必須藉由內 在的詮釋與說明才會有意義,透過決策中心決定動作順序,最後由神經產生肌肉收 縮做出動作,其中,最終的動作,也只是由符號所轉換出來的一筆資料而已。
圖2-2-3 訊息處理概略圖(引自 Schmidt&Lee, 1999 p.42)
2. 生態心理學:
從生態心理學的觀點來看,人類藉由感官知覺接收許多的訊息並且產生出動 作,因此,知覺與動作之間息息相關,知覺會影響動作的產生。而動作也會影響知 覺,就像羽球擊高遠球時,當動作太慢導致擊球點太後面,或是動作太快使得擊球 點太前面,這兩種的擊球動作會影響動作知覺的產生,進而影響姿勢的控制,因此 兩者之間是相互牽絆影響的。在視覺的部份,Gibson(1961)提出視知覺理論,認為 人類可以藉由視知覺從環境中得到訊息的直接結果,這與過去理論認為知覺需要經 過一連串的計算編碼再對動作做出不同的調整觀點有所差異,Gibson認為當人類在 運動或移動時眼睛所接受的光流不斷變化,經時間及空間的相互作用後,使人類能 知覺所處環境中物體與本身的相對位置。例如:坐在行進的列車上向窗外看去,會 看到窗外的景色因距離的關係以不同速度向後移動,而有物體遠近之訊息產生。另 外,當飛機向前平飛時,只有遠處地平線上的一點不動,地面及雲層則隨前進速度 持續變化,距離近的變化速度快而遠處變化慢。而在飛機著地時,駕駛眼睛注視著 陸點,會看到以著陸點為中心向四周擴散之景色變化,變化快慢會從著陸點向外漸 增(Gibson,1950)。從動作學習的過程中,可以看見人體藉由適當的控制,產生多肢 段的變化並且組成各式各樣的動作,然而,在這樣的過程中,個體是如何控制肢段 間的移動與變化,進而達成動作目標呢?從過去重視輸入與輸出兩者之間關係的訊
Input (Signals)
Processing (The human)
(Motor response) Output
息處裡理論,可以看出大腦的分析與計算對於學習者的重要性,在生態系統理論中,
對於訊息有著的看法,除了外在刺激訊息的接收以外,也強調知覺的重要性,藉由 知覺調整、適應產生出適當的行為。有關於知覺與動作的關聯,認知心理學派與生 態心理學派對人類知覺處理提出了不同的看法與解釋。以下由Williams, Davids 與 Willams (1992)整理而成的知覺建構學說與直接學說,探討訊息處理與直接知覺理論 在不同理論下,視覺扮演平衡控制過程的角色。如下圖2-2-4表示。
圖2-2-4 知覺建構學說與直接學說(引自Williams, Davids & Willams,1988)
三、平衡與姿勢控制策略
人體常用來以維持穩定的移動策略有四種(Hasson,1994):
(一)踝關節策略,人體通常使用此策略來彌補較小的干擾遠端小腿肌肉群會先收 縮並以踝關節為之點調整重要(一)足踝策略(ankle strategy),人體通常使用此策略 來彌補較小的干擾,遠端小腿肌肉群會先收縮,並以桓關節為之點來調整重心平衡;
A B Meaningless
Sense data
Meaningful Information
Decision center
Interpretor
Meaningful InfortiotionMeaningful
Meaningful Control
Action Action
Meaningful
(二)髖關節策略(hip strategy),當干擾比上述(一)的程度大,但還不至於有跌倒 的危險時,人體會使用此策略處理干擾,身體以髖關節為支點調整重心位置;(三)
懸垂策略(suspensory strategy) ,當身體重心受到向上或向下的垂直干擾,或者雙腳 出現兩個方向的上下移動,為了適應不同的環境,會出現一腳伸直、另一腳彎曲的 反應,對於地面垂直上下移動時所發生的姿勢反應稱為懸垂策略。(四)跨步策略 (steppingstrategy),當重心位移幅度過大,使得足踝策略與髖策略不足以維持平衡 時,就必須以跨步策略來維持平衡,(胡名霞,2003)如圖2-2-5。
圖2-2-5 四種常見的自動化姿勢策略(引自 胡名霞,2003)
五、視覺對平衡控制的影響
Lee(1978)指出透過不同知覺管道所獲得的訊息是造成運動行為改變的重要因 素,其中又以視覺對運動有最大的影響,因此視覺又有「外在本體覺」之稱。洪清 一(1999)指出「視知覺」係個體經由視覺活動而對外界事物產生知覺的過程,換 言之,視知覺是知覺資訊與動作資訊配合的重要發展事實。視覺可偵測身體的位置 以維持身體的平衡(樓迎統、陳君侃、黃榮棋、王錫五,1996)。運動員視覺能力 的優劣對運動表現有很大的影響(Loran & MacEwen, 1997)。
(一)訊息處理的觀點
從訊息處理的觀點來看,當外在事物接近時,個體會將刺激轉換為電位,輸入 神經及脊髓輸送至大腦,在大腦中將這些訊息加以操作處理,並將之過去的經驗,
經由其他管道獲得的訊息,加以連結獲得對事務的了解(Hammill,1992)。在訊息處理 理論中,人類藉由視覺或聽覺,接收刺激或信號之後傳入大腦,訊息處理歷程立即 產生,個體首先將刺激或信號作短暫的記憶儲存,隨後產生選擇性注意與再認知,
使視覺或聽覺等感官系統所接收的刺激或信號產生意義,接著藉由長期與短期記憶 的運作決定活動計劃及產生動作行為 (Schmidt&Lee,1999) 如圖2-2-6。
圖2-2-6 人類訊息進行的程序 (Schmidt&Lee,1999)
Abernethy (1987) 將人的視覺能力區分為「硬體」(hardware)與「軟體」(software) 二部分。「硬體」指感官系統接受外界的視覺訊息等感覺歷程,是屬於身體的差異;
而「軟體」指的是如何將接收到的視覺訊息予以分析、選擇、編碼、提取、處理等 知覺歷程,是屬於認知的差異(陳俊汕,2005)。另外,Davids與Williams (1999) 指出,以訊息處理的觀點而言,視覺能力在運動的控制與執行裡,扮演著非常重要 的地位。
(二)生態系統-直接知覺(direct perception)
美國生態心理學家Gibson (1979) 認為視覺是一種可以在接收外界刺激時,直接 將訊息知覺和反應的接收系統,Lee與Aronson (1974) 的研究當中,曾經進行一項「移 動的房子」實驗,他們在房間裡設計了一面可以移動的牆,用來測試視覺與身體的 平衡控制能力,其中操弄房子的牆壁,使房間的空間變化或者變小,結果發現實驗 參加者看見牆壁突然靠近他們或者突然變遠時,實驗參加者的身體平衡控制立刻受 到嚴重的影響,而造成身體前傾、後傾或是跌倒的現象。雖然,在房子內的環境中,
參加者除了可以依靠視覺判斷事物,在過程中仍然保有和身體其他接收刺激的部 位,然而,視覺卻可以使其他感覺訊息都被忽略,說明在沒有經過大腦處理與計算 的過程中,視覺仍然能夠在當下立即的接收刺激並且做出動作反應。
在動作學習的過程中,學習者能夠以不同的方式、不同的感官系統接收許多內在
Reaction time
Stimulus (Input)
Stimulus identification
Response selection
Response programming
Movement (output)
與外在的回饋,進而達成學習的效果,在過去的認知心理學的理論認為,人類接收 所有的訊息都需要經過大腦的處理與轉換,生態心理學有別於認知心理學家對訊息 的觀點,提出不同的看法,美國生態心理學家Gibson (1979) 提出視知覺的理論,其 主要在說明刺激本來就具有高度組織化並具備高度的資訊,不需要中央神經系統進 一步處理解釋和添加意義,並且認為個體的感覺系統可以從環境中選擇訊息。
Gibson (1979) 認為環境中的訊息是可直接從環境中反應及知覺的,不須再經過大腦 的 轉 換 及 計 算 , 對 於 這 樣 的 過 程 , 生 態 心 理 學 家 稱 之 為 「 直 接 知 覺 」(direct perception)。生態心理學家認為環境中的刺激訊息並非像認知心理學所聲稱的是屬 於低層次、本身不含意義的基本物理量(如描述聲音時只有頻率、振幅之強弱而在 光線只有強度及波長),而是將環境中的刺激視為訊息,如圖2-2-4,B循環中,代 表的是直接學說,當刺激進入時,此刺激已經是種訊息,對於訊息會產生有意義的 控制,進而做出有意義的動作,在過程中所有的訊息都不只是一堆符號與一筆資料,
而是有意義的訊息。
Gibson認為訊息決定了環境與人類間的一種關係,是需經由時間串連所組合而 成的一種複雜結構,這個結構詳盡描述了有關環境中的訊息。另外,從動力系統觀 點來看,運動發展可視為是由許多子系統交互作用下所產生的,各個子系統中有著 各自的影響與發展,並非是單一決定性的動力;動力系統概念與傳統訊息處理的主 要差別在於動力系統是從有機體、環境、與工作間的交互作用來解釋個體學習與控 制過程 (Rose, 1997)。在有機體(organism)與環境(environment)的交互作用下,知覺 (perception)、動作(action)相互影響,知覺的訊息影響會動作的產生而動作產生的結 果會影響知覺的訊息,呈現一種相互循環的狀態 (Michaels&Carello,1981)。從環境 的影響來看,生態心理學家認為環境中訊息有二種性質,分別為訊息恆定性及環境 賦使。
1.訊息恆定性(invariants)
環境中訊息與人類之間有著一定的關係存在,而這種關係並不會隨著時間及空 間轉變而有所變化。也就是說,環境中的恆定訊息不會受到個人經驗多寡而會有不
同變化,但是當外界物理性質產生變化,恆定訊息則有可能會受外界而有所改變,
但是物體本質是不變的。當我們在不同的環境下看同一件物體時,並不會因其距離 遠近、觀看角度不同而呈現不同外形或在不同光源下在顏色上有明顯之變化,而產 生知覺上的不同(中國大百科,心理學,P.551)。由於這些物體物理特性沒有產生 變化,我們知覺到的物體還是一樣沒有改變,例如:體操活動當中,體操選手做出 360度翻轉的動作前,會看見周遭事物(觀眾席、室內燈光..),在翻轉的過程中,
周遭事物的物理性質並沒有因為翻轉而產生改變。因此要判斷環境當中的訊息對於 人類是不是會產生影響,必須先由人類知覺此訊息是否可以應用,並且在過程當中 會依照個人不同的經驗會對環境產生不同的環境賦使。
2.環境賦使(affordance)
Konczak(1990)認為個體主觀評估環境的特質是依其本身相關的特質與能力而 定,不是以某一客觀標準為依據。賦使能力是指人類隨著環境變遷而憑藉自我之經 驗,來知覺環境所賦予的訊息。Stoffregen (2000) 指出環境賦使係個體對環境中事 物的訊息,所產生的知覺或動作反應,而這些動作反應及知覺會隨著個體的經驗不 同而有不同的知覺及動作反應產生。Gibson (1979) 認為環境賦使,是個體因應環境 中物體的形狀、大小等不同訊息及物體的表面配置,產生直接知覺,引起個體與環 境之間交互作用所產生的特定行為。此種情境下,訊息並不需要在動作過程依靠腦 中決策中心來處理訊息,因此在選手翻轉動作過程中會受到環境賦使的影響,產生 不同的表現動作。因此,知覺是有目的、有意義的獲得環境中恆定、與可用的訊息
(例如:事件的情況、結構、表面、目標等),產生有目的、可應用的目標活動 (Gibson,1979)。
第三節 回饋
許多的學者提到,運動學習中影響學習二個重要的變數即為練習與回饋(Salmoni, Schmidt, & Walter, 1984; Newell, Morris, & Scully, 1985;Lee, & Genovese, 1988;
Newell, Antoniou, & Garlton, 1988; Newell, 1991),運動學習是指透過練習或經驗,所 造成動作行為持久性的改變歷程 (Schmidt, 1988),在動作練習過程中,除了「練習」
本身能為學習帶來助益外,有效與適當的回饋訊息,亦是影響學習的重要變項之一。
回饋指學習者在動作執行過程中或動作結束後,接受到與動作表現有關的修正 訊息,Magill (2004) 指出,回饋主要分為內在回饋與外在回饋兩種類,內在回饋來 自動作者本身,包含:視覺、聽覺、本體覺與觸覺,外加回饋指外界對於動作結果 所「外加」的訊息,如圖2-3-1,本研究針對外在回饋中的視覺以及本體覺進行探討。
圖2-3-1 回饋的種類 (引自Magill, 2004)
回饋給予的目的在於幫助學習者提供與動作有關的相關訊息,使其動作表現與 學習的目標更為貼近,當老師或教練希望幫助學習者學習動作或一項運動技能的時 候,很重要的一件事就是要找出怎麼樣的引導可以讓學習者學得更快更好,常見的 如指導者會在學習者做動作的同時,以口頭的方式提醒學習者下一個動作是什麼,
或是提醒練習者用怎樣的節奏做這個動作。因此,要幫助者學習動作學習,「回饋」
如何給予是我們要注意的重要關鍵。
回饋
內在回饋
結果 告知
外在回饋
表現 視覺 聲音 本體覺 觸覺 告知
一、回饋的來源與種類:
(一)依回饋來源的不同分為:內在(intrinsic)與外在(extrinsic),指反應效果的歷程 自然的發生於個體本身,可直接從感官來獲得,不需透過外在人為的因素來提供訊 息;內在回饋的控制,是由神經中樞的輸出控制肌肉和關節的運動,存於肌肉、腱、
靭帶和關節的本體感受器再把有關運動結果的訊息傳入神經中樞,以矯正中樞的控 制,而達成動作修正的目的(林清和,1996)。例如:自己聽到的、看到的、感覺 到的訊息,或者在拋球的過程中,自己用了多大了力量。內在回饋是在產生動作的 過程中自然發生的訊息,如果失去此種訊息可能會影響動作的控制與學習;外在回 饋的感覺是外界給予的,又稱為增強回饋或擴增性回饋,是指用人工的方式測量動 作所產生的表現結果,並將訊息提供給學習者。外在回饋其回饋訊息來自於外界的 提供,如透過口語、影像或其他的方式告知學習者,使其了解動作執行過程中的情 形或結果,提供其改進、修正錯誤的方向。Schmidt (1991) 認為提供外在的回饋對 學習有以下的作用:1. 提供動機增進學習者的學習效率。2.提供動作是否正確的訊 息。3.提供基本的修正訊息。4. 附屬的價值-在得到回饋以後能發現問題的癥結。
外在回饋又可區分為結果獲知(knowledge of result, KR)及表現獲知(knowledge of performance, KP)。
(二)依照回饋給予的時間來分類:可分為終期回饋(terminal augmented feedback) 與同時回饋(concurrent augmented feedback),終期回饋指的是在完成一段表現或動作 後才給予回饋,而同時回饋指的是當一個人在表現一項技能或做動作同時就給予回 饋(Magill,2004)。終期回饋又分為立即回饋(instantaneous或immediate feedback),也 就是在動作完成後立即給予,以及延遲回饋,也就是動作完成後過一陣子才給予的 回饋(胡名霞,2001),舉例來說,立即性的終期回饋也就是在運球上籃的過程,
看見籃球穿越過籃框的結果,或者是射箭選手射中箭靶的結果,而延遲性的終期回 饋如同在射擊的過程中,每打完五發子彈才看一次分數。另外,同時性回饋如同在 開車的過程中,可以藉由同時回饋在蜿蜒的道路上行駛、走平衡木過程中,利用視 覺與本體覺調整重心,球拍帶給使用者知覺感受的轉動慣量,不同形狀的物體代表
質量分布不同,質量分布不同可提供不同的轉動慣量知覺,因此透過轉動慣量可在 沒有視覺的情況下知覺不同形狀和大小(Burton, Turvey, & Solmon, 1990)。
二、同時回饋對表現之影響
Newell與Chew (1974) 指出學習者透過練習修正動作進而發展堅固表徵的機 制,使動作訊息回饋成為習得運動技能不可或缺的變項。Lee, Keh, 與Magill (1993) 研究指出回饋不僅是影響運動技能學習的重要因素,對於運動技能的提升亦扮演著 舉足輕重的角色。廖庭儀(2003)在動力系統的架構下,以學習曲線的分析探討不 同自然回饋強度對運動技能學習的影響。結果發現:操弄不同的學習順序先學簡單 或困難組對不同階段的影響,結果發現在練習效果部份,先學習困難組表現上優於 先學習較簡單組;而學習效果顯示出二者間沒有顯著的差異。
Sarver (1999) 的研究,設計了在視覺回饋下不同損傷程度的患者進行觸碰目標物的 實驗,實驗發現其動作差異並不隨有無視覺回饋而有不同,推測可能原因是因為神 經損傷非一般傷害,故無顯著差異。McFarland, McCane, 與Wolpaw (1998)利用視覺 回饋來學習控制腦電波中的某一頻率,其中實驗同時發現顯著、持續的視覺刺激並 不是維持動作表現的必要要求。Pigeon等 (1998) 便是假設在運動控制的過程中其機 能協調性的功能和視覺回饋是沒有相關的,實驗結果也說明為了使運動更有效率,
手和身軀的協調性並不需要視覺回饋。Greespoon與Foreman (1956) 的實驗提到,讓 受試者試畫3吋的線段,受試者知道結果的時間從0到3秒不等,研究結果顯示給予同 時回饋的實驗組平均正確反應數優於控制組。Rougier (1999) 的研究是利用測力板 和電腦的組合,透過電腦螢幕呈現重心的變化,參加者可以藉同時給予視覺回饋很 快的進行調整。Desmurget, Pelisson, Rossetti, 與Prablanc (1998)曾經提出:『當一個 人能夠即時接收到越多關於其動作的資訊回饋時,將會使其在控制層面較沒有任何 回饋的人來得更加成功』。Blank等人 (1999)的研究探討關於同時給予視覺回饋對 不同年齡層的人在靜態抓握時的影響。結果顯示同時給予視覺回饋在力量的控制上 是有其影響力的。Hay等 (1997) 的研究則是在當無任何視覺回饋下進行指向目標活 動(goal-directed movement),實驗結果說明:不論任何年齡,其肌肉自體的控制力在
缺乏視覺回饋下控制移動軌跡往往就像是錯誤的訊號,尤其是對比較小的孩童而 言。Swinnen, Walter, Lee,與Serren (1993) 學習兩手協調的實驗中,顯示同時性回饋 不止提升「練習中」的表現有幫助,也在保留測驗中呈現學習效果。在Verschueren, Swinnene,Dom, 與DeWeerdt (1997) 的畫橢圓實驗中,在練習時期,有無同時回饋的 兩組成績出現顯著的進步情形,但在保留測驗的時候,同時回饋組在成績上卻有顯 著性的滑落。Winstein, Pohl, Cardinale, Green, Scholtz, 與Sauber-Waters (1996) 在力 量分配實驗中也提出同時性回饋有利於動作的執行,卻不利於動作的學習。Annett (1969) 研究追蹤儀的操作發現提供學習者同時性的回饋,在去除回饋之後表現即受 到減損的現象,研究者將同時性回饋無法在移除後繼續維持或者促進表現的情形,
解釋為「柺杖效應(guidance hypothesis)」。意指回饋能引導學習者作出正確的表 現,但也可能使學習者因而忽略其他在撤除回饋後所必須的訊息來源。然而,在由
此可知同時性回饋對於學習有著不同的效果。拐杖效應(guidance hypothesis)也稱為 引導假說,引導假說是由Salmoni, Schmidt, 與Walter (1984) 所提出,理論主要觀點 認為:提供頻繁的動作回饋會產生正、反兩方面的效應。正效應即是追加回饋的參 考信息作用。這種效應對學習結果的了解,並在學習獲得過程中被用於校正誤差和 改進下一次的操作;但是,增加回饋在識別錯誤、校正誤差的過程中,會干擾學習 者自我問題的解決能力,這便是動作回饋的負面效應。因此,引導假說理論提出,
在學習的過程中,太多的動作回饋,會導致受試者依賴動作回饋進行操作(張登聰、
曾慶裕,2006)。Swinnen (1996)整理回饋相關實證研究結果獲得以下結論:1. 學 習者會主動涉入錯誤偵測與修正的過程 2. 並非每次練習都需要回饋 3. 在某些情 況下回饋甚至對學習有害。從過去同時性回饋的研究來看,可以發現同時性回饋對 於學習有不同的研究結果,視覺回饋所提供的影像、圖表或是數值等,對於學習而 言,也是種資訊,學習者面對這些資訊時該如何去掌握以增進動作技能呢?本研究 以全身性動作做為動作目標,了解同時性視覺回饋在過程中對學習者帶來的影響。
第三章 研究方法與步驟
第一節 實驗參加者
本研究以 32 名台東大學學生為實驗參加對象,性別均為女性,年齡為 18-20 歲,
實驗參加者無運動專長,並且沒有操作過平衡板的經驗,身體活動功能正常,無 視力障礙或經矯正後視力正常者。實驗分組分為實驗組與控制組,每組 16 人,
實驗組給予同時性視覺回饋訊息(以下簡稱 T 組),控制組無給予同時性視覺回饋 訊息(以下簡稱C 組)。
第二節 實驗流程
實驗參加者進行在實驗進行前,必須先簽署實驗參加者同意書兩份(附錄一), 一份為研究者保留,另一份為參加者保留,實驗流程依序如下:
一、每位實驗參加者進行一次前測,以前測的平衡時間進行第一次分組,32 位實驗 參加者共分為兩組,分別為T 組與 C 組。
二、隔天進行平衡練習,每次練習開始,三維動作分析系統會提示開始的聲音,實 驗參加者聽見此提示聲音後開始站立平衡,平衡板開始累計參加者平衡過程的 時間,30 秒後會出現結束的提示聲音,隨後停止平衡動作。
三、每回合平衡練習結束後,立即作一次遷移測驗。
四、實驗參加者每一天最多參與兩次的平衡練習,每一次平衡練習時間最少間隔三 十分鐘,但不超過三天。
五、T 組與 C 組經過 10 回合的平衡練習結束後,以第 9-10 次遷移測驗的平均值做 為第二次分組依據。
六、第二次分組將T 組分為 TT 與 TC 組,C 組分為 CT 與 CC 組,四組進行第 11-20 回平衡練習與立即遷移測驗,每回合遷移測驗中參加者聽見開始的提示聲音開 始動作,並依照不同組別做出平衡方式。
七、經過第11-20 回的平衡練習後,於隔週進行延遲遷移測驗。
第三節 實驗設計
本實驗共有兩次的分組與20 回的平衡練習,每回 10 次,每次 30 秒,每一回練 習後會做1 次遷移測驗,隔週進行 1 次延遲遷移測驗,平衡範圍設在左右兩邊各正 負5 度範圍內。參加者目標均為,在每一次練習與測驗過程中,在組別所設定的不 同視覺回饋方式下,盡量維持平衡板在水平的狀態。
一、第一次分組:
將實驗參加者先進行一次前測,以前測的平衡時間作為分組的依據,進行同質 分組,將32 位參加者分為兩組,分別為 T 組與 C 組,人數皆為 16 人,每一位參加 者進行前 10 回的平衡操作,T 組參加者與 C 組參加者練習過程中,分別以不同的 方式進行平衡練習,T 組以同時性視覺回饋指標作為練習平衡的參照依據,同時性 視覺回饋指標可以顯示出T 組參加者練習過程中的平衡狀況,藉由數位攝影機的拍 攝將同時性視覺回饋指標所顯示的平衡狀況投影呈現在29 吋電視機上,T 組參加者 在平衡過程中藉由參照電視機投影出來的同時性視覺回饋指標,可以立即的調整平 衡狀態;C 組以觀看實驗所設計的 C 組目標物,作為平衡的控制方式,以自我本體 感覺作為練習平衡的方式。T 組與 C 組參加者在每一回練習與測驗中,以高速攝影 機拍攝動作型態,擷取參加者的動作過程。
二、第二次分組:
進行 10 回的平衡練習之後,將 T 組 16 人依能力(平衡時間)平均分為兩組,每 組8 人,一組持續給予同時性視覺回饋訊息作為平衡的參考(以下簡稱為 TT 組),
另一組將同時性視覺回饋訊息移除(以下簡稱TC 組);在 C 組的部分,將 C 組 16 人依能力人數平均分為兩組,每組8 人,一組持續進行注視目標物作為的平衡方式
(以下簡稱CC 組),一組改以觀看同時性視覺回饋訊息作為平衡的方式(以下簡稱 CT 組),參加者以第9-10 回遷移測驗的平均時間作為分組的依據。在遷移與保留測 驗的部分,實驗參加者必須觀看電視螢幕上所呈現出來的影像,其中影像每三秒變 化一次,影像變化內容為四種方向的變化,分別為右上方、左上方、右下方、左下
方,實驗參加者必須依照電視影幕所呈現出來的方向,同時伸直手臂比出電視所呈 現出來的方向。
第四節 實驗儀器與場地佈置 一、實驗儀器:
(一) 平衡板(Lafayette model 16020 LR):實驗參加者需在平衡板上進行平衡的 練習、遷移與保留測驗,平衡板可以測量出參加者在每一次平衡過程中的平衡時 間,如圖3-4-1 所示。
(二) 29 吋電視機(SONY KB-29SL40T ) :用於接收數位攝影機所拍攝下來的同 時性視覺回饋指標影像,在平衡的過程中立即呈現給T 組參加者作為平衡的參照 方式,如圖3-4-2 所示,並且以 29 吋電視播放遷移測驗內容,如圖 3-4-3 所示。
(三) 數位攝影機(SONY DCR TRAV11 ) :主要目的在於拍攝 T 組參加者練習過 程中同時性視覺回饋指標的影像,立即將影像傳送到29 吋電視螢幕上。
(四) 同時性視覺回饋標示:同時性視覺回饋指標約為21X13 公分的大小,設有平 衡指針與平衡標準線,當平衡板越接近水平狀態時,平衡指針與平衡標準線的距 離會越近,當平衡板達到水平時,兩者會產生重疊。如圖3-4-2 所示。
(五) C 組目標物:以攝影機腳架為調整高度的方式,在腳架上放置一球體,球體 直徑約為7 公分,C 組在練習過程中需將視覺目標置於此球體,排除在 C 組參加 者練習過程中找尋其他平衡參照機制,如圖3-4-4 所示。
(六) 三維動作分析系統(Qualisys motion capture systems):實驗過程中共有四台高 速攝影機(Mac Reflex NP-240)與擷取軟體,主要用於拍攝參加者練習與測驗中 動作型態的變化,高速攝影機如圖3-4-5。
(七) 反光標誌:約為直徑1 至 2 公分的球體,球體表面反光為材質,主要在於讓 三維動作分析系統藉由反光標誌的反射,擷取各個參加者學習過程中平衡板頻率 與幅度的變化情形。
圖3-4-1 動態平衡板(Lafayette model 16020 LR)
圖3-4-2 T組同時性視覺回饋指標投射影像-重心在右與重心在左
圖3-4-3 T 組與 C 組立即遷移、延遲測驗內容
圖 3-4-4 C 組目標物
圖3-4-5 高速攝影機
二、場地佈置
(一)實驗器材位置與關係:
1. 29 吋電視機(SONY KB-29SL40T ):電視機的位置在參加者約前方 2 公尺,高 度約與眼睛同高,如圖3-4-6 所示。
2. C 組目標物:C 組目標物的位置在參加者約前方 2 公尺,高度約與眼睛同高,如 圖3-4-7 所示。
3. 數位攝影機(SONY DCR TRAV11 ) :架設在平衡板的後方,投影方式如圖 3-4-8 與3-4-9 所示。
4. 高速攝影機(Mac Reflex NP-240):分別架設在距離實驗參加者右前方、左前方、
右後方、左後方約5 公尺的位置,架設高度約 4 公尺,如圖 3-4-10 所示。
圖 3-4-6 平衡板與電視機位置
圖3-4-7 平衡板與 C 組目標物的位置
圖3-4-8 數位攝影機投影擺設方式-正拍
圖3-4-9 數位攝影機投影擺設方式-側拍
圖3-4-10 實驗參加者與高速攝影機1號、2號的放置位置
高速攝影機1 號
高速攝影機2 號
(二)場地示意:如圖3-4-11 所示。
圖3-4-11 場地示意圖
(三)實驗地點:國立台東大學體育學系2 樓運動心理學實驗室。
第五節 資料蒐集與處理
本研究將資料蒐集主要分為同時性視覺回饋的學習結果與同時性視覺回饋的練習過 程,各包括平衡板平衡時間、平衡頻率、幅度三個部分,資料蒐集與處理分述如下:
ㄧ、資料蒐集:
(一)平衡時間:蒐集學習者前測、第1-20 回平衡操作、延遲遷移測驗的資料,將 平衡板角度設定在左右各正負 5 度範圍,以平衡板的計時器測量每一次維持 平衡的時間。
(二)平衡頻率:在平衡板左右板面上標示兩點反光標誌,代表平衡板的座標位置,
蒐集參加者第1、10、11、20 回平衡板來回擺動的頻率數據,動作過程中以 高速攝影機拍攝反光標示,作為計算平衡頻率的資料。
(三)平衡幅度:在平衡板左右板面上標示兩點反光標誌,代表平衡板的座標位置,
蒐集參加者第1、10、11、20 回平衡板擺動的角度數據,動作過程中以高速 攝影機拍攝反光標示,作為計算平衡幅度的資料。
電 視
C 組目標物
數位攝影機
逆時針方向分別為高速攝影機1-4 號
1 號 4 號 3 號
2 號