探討ERD方法在腦機介面系統設計之效能
82
0
0
全文
(2) 探討 ERD 方法在 腦機介面系統設計之效能 Investigation of the ERD Approach for BCI System Design 研 究 生:吳岳昌. Student : Yueh-Chang Wu. 指導教授:羅佩禎 博士. Advisor : Dr. Pei-Chen Lo. 國立交通大學電機與控制工程學系 碩士論文. A Thesis Submitted to Department of Electrical and Control Engineering College of Engineering National Chiao Tung University in partial Fulfillment of the Requirements for the Degree of Master in Electrical and Control Engineering June 2004 Hsinchu, Taiwan, Republic of China.. 中華民國九十三年六月 2.
(3) 探討 ERD 方法在 腦機介面系統設計之效能 研究生︰吳岳昌. 指導教授︰羅佩禎. 國立交通大學電機與控制工程學系. 摘要 根據觀察,想像動作時大腦運動區的神經元活動方式,和實際動作執行下的 情形非常類似,其中,最明顯的特徵就是 mu 波和 beta 波振幅的抑制。這種大腦 皮層的感覺運動神經因某些特定的事件而發生的非同步或同步活化現象,稱之為 event-related desynchronization/synchronization(ERD/ERS) 。本篇論文主要的目的在 於建構一套腦機介面系統,利用 ERD 的方法,判別受測者想像左右手動作時的 腦電波變化。 本研究使用 DSLVQ 的方法找出最佳的頻帶範圍,再應用線性判別分析做形 態分類。為了發展即時的腦機控制系統,我們先由受測者的腦電波特徵,訓練出 受測者特有的分類器。在即時的分析上,腦機介面系統便藉由訓練出來的分類器 即時判別腦電波的形態。在目前的階段,我們的方法可以達到 60%~80%的判別 正確率。. 3.
(4) Investigation of the ERD Approach for BCI System Design Student:Yueh-Chang Wu. Advisor:Dr. Pei-Chen Lo. Department of Electrical and Control Engineering National Chiao-Tung University Abstract The neural activities of left hand and right hand imagery in sensorimotor cortex are similar to that of actual movements. The most significant features are the amplitude attenuation of mu and central beta rhythms. This phenomenon, neurons activation related to specific events, is called event-related desynchronization/synchronization (ERD/ERS). The goal of this research is to establish a Brain-Computer interface for discrimination between left and right hand imagery by using the ERD/ERS. In this thesis, we first use Distinction Sensitive Learning Vector Quantization (DSLVQ)for selecting an appropriate frequency band for analysis. Next, the Linear Discriminant analysis(LDA)is applied to pattern classification. In order to develop the real-time BCI control scheme, we first train the classifier with typical patterns extracted from EEG of the subjects. In the online analysis, the trained classifier is then applied to the BCI system for identifying the “EEG command” in the real-time manner. At the current stage, our method can achieve an accuracy of classification of 60%~80%.. 4.
(5) 誌 謝 首先要感謝指導老師 羅佩禎教授對我論文上的指導,也衷心感激老師對於 我所付出的耐心,由於老師認真、親切的態度,讓我受益匪淺,同時也要感謝口 試委員 林進燈教授及楊谷洋教授,對本論文的建言和指正,讓我知道論文的不 足之處,使論文更加完整。以及感謝腦科學中心所提供的經費,購置本研究的腦 機介面系統設備。. 在學習的過程中,要感謝博士班學長姐:剛鳴、瑄詠、憲正、適達和權毅的 殷勤指導。特別感謝憲正、適達和權毅學長,他們對本論文的建議和協助,使我 能順利畢業,而他們嚴謹的學習態度,也一直是我想要效法的地方。再來,我想 感謝的是已經畢業的學長:仁隆、哲賢、維廷,總是在我困惑的時候給予開導, 並讓我的研究生活增添無數的樂趣與歡笑。在此也感謝實驗室的同學:啟弘、偉 源、清文、富滄,在研究之餘,陪我一起度過。真的感謝陪伴著我度過碩士生涯 的各位。. 最後,要感謝我親愛的家人和小雯,對我的愛和支持讓我毫無後顧之憂的完 成這段學業,他們是我心靈上最大的寄託和安慰,並提供我許多寶貴的意見和幫 助,讓我可以朝著理想前進。. 5.
(6) 目 錄 中文摘要------------------------------------------------------------------------------------------------I 英文摘要-----------------------------------------------------------------------------------------------II 誌謝-----------------------------------------------------------------------------------------------------III 目錄----------------------------------------------------------------------------------------------------IV 表目錄-------------------------------------------------------------------------------------------------VI 圖目錄------------------------------------------------------------------------------------------------VII. 第一章. 導論--------------------------------------------------------------------------------------- 1. 1.1 背景 ---------------------------------------------------------------------------------------- 1 1.2 相關研究 --------------------------------------------------------------------------------- 1 1.3 研究動機 --------------------------------------------------------------------------------- 3 1.4 章節安排 --------------------------------------------------------------------------------- 3. 第二章. 理論與方法 ----------------------------------------------------------------------------- 5. 2.1 腦電波------------------------------------------------------------------------------------- 5 2.2 實驗設備 --------------------------------------------------------------------------------- 7 2.3 腦電波分析方法------------------------------------------------------------------------ 8 2.3.1 前置處理 ------------------------------------------------------------------------- 9 2.3.2 特徵萃取 ------------------------------------------------------------------------11 2.3.3 DSLVQ--------------------------------------------------------------------------12 2.3.4 ERD/ERS -----------------------------------------------------------------------15 2.3.5 線性判別分析 ------------------------------------------------------------------17 2.3.6 10×10 混合交叉確認 --------------------------------------------------------21. 6.
(7) 第三章. 實驗流程 -------------------------------------------------------------------------------23. 3.1 腦電波錄製 -----------------------------------------------------------------------------23 3.2 實驗設計 --------------------------------------------------------------------------------24 3.3 腦機介面之訓練部分 ----------------------------------------------------------------26 3.4 受測者的有效頻帶 -------------------------------------------------------------------27 3.5 分類器的計算 --------------------------------------------------------------------------28 3.6 腦機介面之回授部分 ----------------------------------------------------------------29. 第四章. 實驗結果 -------------------------------------------------------------------------------31. 4.1 ERD 的結果 ---------------------------------------------------------------------------31 4.2 最佳化頻帶 -----------------------------------------------------------------------------36 4.3 分類器的選擇 --------------------------------------------------------------------------40 4.4 錯誤率比較與結果分析 -------------------------------------------------------------41 4.4.1 實際動作和想像動作--------------------------------------------------------42 4.4.2 固定頻帶和受測者特定頻帶 ----------------------------------------------45 4.4.3 想像左右手動作和想像手腳動作 ---------------------------------------48 4.4.4 實驗次數的增加 --------------------------------------------------------------51 4.4.5 無回授和有回授 --------------------------------------------------------------54 4.4.6 權重向量的更新 --------------------------------------------------------------57. 第五章 結論與未來展望 -----------------------------------------------------------------------62 5.1 結論 ---------------------------------------------------------------------------------------62 5.2 未來展望 --------------------------------------------------------------------------------63. 附錄---------------------------------------------------------------------------------------------------65 參考文獻 --------------------------------------------------------------------------------------------68 7.
(8) 表目錄 表 2.1 腦電波的基本種類 ----------------------------------------------------------------------- 6 表 4.1. ERD 平均下降幅度 --------------------------------------------------------------------35. 表 4.2 受測者的最佳頻帶範圍 ---------------------------------------------------------------36 表 4.3 實際動作和想像動作的錯誤率分佈 -----------------------------------------------43 表 4.4 固定頻帶和受測者特定頻帶的錯誤率分佈--------------------------------------46 表 4.5 想像左右手動作和想像手腳動作的錯誤率分佈 --------------------------------49 表 4.6 三次實驗的錯誤率分佈 ---------------------------------------------------------------52 表 4.7 無回授和有回授的錯誤率分佈------------------------------------------------------55 表 4.8 受測者 R 六次實驗的錯誤率分佈 --------------------------------------------------58 表 4.9 受測者 S 六次實驗的錯誤率分佈 --------------------------------------------------59. 8.
(9) 圖目錄 圖 2.1 腦電波基本種類的波形 ---------------------------------------------------------------- 6 圖 2.2 實驗設備------------------------------------------------------------------------------------ 8 圖 2.3 腦電波分析方法流程圖 ---------------------------------------------------------------- 9 圖 2.4 雜訊偵測器--------------------------------------------------------------------------------10 圖 2.5 遲緩皮層電位 ----------------------------------------------------------------------------11 圖 2.6 P300 誘發電位 --------------------------------------------------------------------------11 圖 2.7 二維空間兩群的分類-------------------------------------------------------------------14 圖 2.8 ERD 計算流程圖 -----------------------------------------------------------------------15 圖 2.9 活動週期視窗的移動-------------------------------------------------------------------16 圖 2.10 ERD 的計算過程----------------------------------------------------------------------17 圖 2.11 兩個族群的分佈------------------------------------------------------------------------19 圖 2.12 10 混合交叉確認 ---------------------------------------------------------------------22 圖 3.1 腦電波電極分佈圖 ----------------------------------------------------------------------24 圖 3.2 腦機介面實驗的兩個部分 ------------------------------------------------------------25 圖 3.3 訓練部分的每段觸發訊號時間表---------------------------------------------------26 圖 3.4 訓練部分到回授部分的流程圖------------------------------------------------------27 圖 3.5 產生回授的流程圖 ----------------------------------------------------------------------29 圖 3.6 回授部分的每段觸發訊號時間表---------------------------------------------------30 圖 4.1 受測者 A,mu 頻帶的 ERD-----------------------------------------------------------32 圖 4.2 受測者 A,beta 頻帶的 ERD ---------------------------------------------------------32 圖 4.3 受測者 B,mu 頻帶的 ERD-----------------------------------------------------------33 圖 4.4 受測者 B,beta 頻帶的 ERD----------------------------------------------------------33 圖 4.5 受測者 C,mu 頻帶的 ERD-----------------------------------------------------------34. 9.
(10) 圖 4.6 受測者 C,beta 頻帶的 ERD----------------------------------------------------------34 圖 4.7 受測者 A,DSLVQ 的權重值(C3 頻道)---------------------------------------37 圖 4.8 受測者 A,DSLVQ 的權重值(C4 頻道)---------------------------------------37 圖 4.9 受測者 A,選擇的頻帶----------------------------------------------------------------37 圖 4.10 受測者 B,DSLVQ 的權重值(C3 頻道) -------------------------------------38 圖 4.11 受測者 B,DSLVQ 的權重值(C4 頻道) -------------------------------------38 圖 4.12 受測者 B,選擇的頻帶 --------------------------------------------------------------38 圖 4.13 受測者 C,DSLVQ 的權重值(C3 頻道) -------------------------------------39 圖 4.14 受測者 C,DSLVQ 的權重值(C4 頻道) -------------------------------------39 圖 4.15 受測者 C,選擇的頻帶 --------------------------------------------------------------39 圖 4.16 受測者 A、B、C 的錯誤率 ---------------------------------------------------------40 圖 4.17 受測者 A、B、C 的標準差 ---------------------------------------------------------41 圖 4.18 受測者 C,實際動作和想像動作的錯誤率-------------------------------------42 圖 4.19 受測者 C,實際動作和想像動作的標準差-------------------------------------42 圖 4.20 受測者 D,實際動作和想像動作的錯誤率 ------------------------------------43 圖 4.21 受測者 D,實際動作和想像動作的標準差 ------------------------------------43 圖 4.22 受測者 E,實際動作和想像動作的錯誤率-------------------------------------44 圖 4.23 受測者 E,實際動作和想像動作的標準差-------------------------------------44 圖 4.24 受測者 F,固定頻帶和特定頻帶的錯誤率 -------------------------------------45 圖 4.25 受測者 F,固定頻帶和特定頻帶的標準差 -------------------------------------45 圖 4.26 受測者 G,固定頻帶和特定頻帶的錯誤率 ------------------------------------46 圖 4.27 受測者 G,固定頻帶和特定頻帶的標準差 ------------------------------------46 圖 4.28 受測者 H,固定頻帶和特定頻帶的錯誤率 ------------------------------------47 圖 4.29 受測者 H,固定頻帶和特定頻帶的標準差 ------------------------------------47 圖 4.30 受測者 I,想像左右手動作和想像手腳動作的錯誤率 ---------------------48 圖 4.31 受測者 I,想像左右手動作和想像手腳動作的標準差 ---------------------48 10.
(11) 圖 4.32 受測者 J,想像左右手動作和想像手腳動作的錯誤率 ---------------------49 圖 4.33 受測者 J,想像左右手動作和想像手腳動作的標準差 ---------------------49 圖 4.34 受測者 K,想像左右手動作和想像手腳動作的錯誤率 --------------------50 圖 4.35 受測者 K,想像左右手動作和想像手腳動作的標準差 --------------------50 圖 4.36 受測者 L,三次實驗的錯誤率-----------------------------------------------------51 圖 4.37 受測者 L,三次實驗的標準差-----------------------------------------------------51 圖 4.38 受測者 M,三次實驗的錯誤率 ----------------------------------------------------52 圖 4.39 受測者 M,三次實驗的標準差 ----------------------------------------------------52 圖 4.40 受測者 N,三次實驗的錯誤率-----------------------------------------------------53 圖 4.41 受測者 N,三次實驗的標準差-----------------------------------------------------53 圖 4.42 受測者 O,無回授和有回授的錯誤率 -------------------------------------------54 圖 4.43 受測者 O,無回授和有回授的標準差 -------------------------------------------54 圖 4.44 受測者 P,無回授和有回授的錯誤率 -------------------------------------------55 圖 4.45 受測者 P,無回授和有回授的標準差 -------------------------------------------55 圖 4.46 受測者 Q,無回授和有回授的錯誤率 -------------------------------------------56 圖 4.47 受測者 Q,無回授和有回授的標準差 -------------------------------------------56 圖 4.48 六次實驗的流程圖 --------------------------------------------------------------------57 圖 4.49 受測者 R,六次實驗的錯誤率-----------------------------------------------------58 圖 4.50 受測者 S,六次實驗的錯誤率 -----------------------------------------------------59. 11.
(12) 第一章 導論 1.1 背景 隨著腦科學的研究突破與腦電波訊號擷取的科技日益進步,近幾年來有關腦 機介面(Brain computer Interface, BCI)的技術逐漸受到重視,腦機界面是一種大 腦可以直接與外部設備溝通的裝置,使用者能夠運用他們的意志去控制特定的電 腦儀器,目的在於幫助因神經肌肉損傷而行動受到阻礙的人(如中樞神經系統損 傷、重度中風、肌萎縮性脊髓側索硬化症的病人等),雖然他們無法自由活動, 但大腦的知覺和認知能力並沒有受到太大的影響,這些病人還是可以察覺到週遭 的環境,只是無法與人溝通。唯一的解決方法便是讓病人能夠藉由腦部的訊號, 取代傳統需要週邊神經及肌肉配合,直接與外界溝通,如此一來他們就能夠自由 的表達情緒、傳達訊息、自主行動,以及自我照顧等。. 經由許多研究團隊的不斷努力,測試了許多不同的方法,絕大部分還是利用 腦電波(electroencephalography, EEG)來當腦機介面的輸入,利用特定思維時所 錄下的相關腦電波訊號,萃取出特徵,並加以分類,最後把分類出來的結果做為 輸出,而這些輸出便可轉為對應的控制訊號,並依照不同的目的而作不同的運 用,例如:滑鼠游標的控制、文字或語句的選擇或是義肢的控制等。. 1.2 相關研究 在 1973 年,大腦與電腦間直接通訊的想法就被提出,同時間,不同型式腦 機介面系統的構想也相繼被提出:Donchin, 和 Farwell 等人用外部刺激(external 12.
(13) stimulation)和誘發電位(analyzed evoked potentials)的方法[1]。Hiraiwa 等人則用 神經網路的方法[2]來分類動作前的準備電位(readiness potentials) 。Bierbaumer 等 人研究與感覺和認知過程中[3]相關的負變動(negative shifts),且 Kotchoubey 等 人並將此方法應用在腦機通訊系統上[4]。Keirn and Aunon [5]研究不同心智活動下 的腦電波辨別。Scutter [6]提出藉由大腦反應的視覺自發控制系統。Wolpaw 和 McFarland 發展自發性產生的不同腦電波形態(EEG pattern)[7], [8]。Pfurtscheller 等人採用學習分類法去區別準備動作時 mu rhythm 和中心 beta rhythms 的差異性 [9], [10]。. 人腦和電腦之間的通訊需要受測者自覺產生的腦電波形態,且要能夠讓電腦 明確的分辨。Pfurtscheller 等人在運動區、前運動區、體感覺區[11]觀察到與動作 相關的腦電波訊號,在動作的期間,mu rhythm 和中心 beta rhythm 的 event-related desynchronization(ERD, [12])會有不同空間分佈,例如左手動和右手動[13]便會 產生這種現象。之後,Flotzinger 等人[14]及 Pregenzer 等人[15]把預測左右手動作 的分類方法加以改進。接著,Kalcher 等人[16]和 Pfurtscheller 等人[17]更發現到當 受測者在想像要動作時也會和真正在動作時有同樣的結果。. 雖然腦機介面系統的構想很早就被提出,但在近十幾年來才算真正的開始, 電腦處理速度的增加以及精良的腦電波儀器讓腦機介面有了新的發展。1996 年 Fukuda 以類神經網路對時序的腦波作波形辨認,能成功辨識出睜眼及閉眼的α 波;2002 年成功大學的 C. W. Chen 以小波神經網路偵測 mu 波變化以判斷是否進 行拇指的自主動作,正確率可達到 70%[36]。. 腦機介面系統可使用不同的大腦訊號做為輸入:Birbaumer 研究利用遲緩皮 層電位(slow cortical potential, SCP, [35])做為想法轉換裝置(thought translation device, TTD)的輸入,想法轉換裝置根據遲緩皮層電位的變化將螢幕上球狀的光 13.
(14) 點移動到受測者想要的目標,經過多次的實驗訓練,受測者能夠利用這個裝置寫 下一段文字(大約是兩分鐘一個字母);Farwell 和 Donchin 利用 P300 誘發電位 [18],讓受測者在 6×6 的字母表格內選取想要的字母(大是每分鐘約六個字母); Middendorf 等人則是讓螢幕上的目標物閃著不同頻率,再根據穩態視覺誘發電位 (steady-state visual evoked potential, [19])的振幅大小,找出受測者注視的目標 (大約是每分鐘兩次) 。. 1.3 研究動機 本實驗室(生醫訊號研究實驗室)多年來從事腦電波相關研究,對於很多現 象與特徵的了解和各種演算法發展有相當的成果,而腦電波的研究和分析技術也 逐漸成熟,因而希望自行發展一套腦機介面系統,提升使用者對腦機介面系統控 制的正確率,本論文基於這個原因將對腦機介面做各方面的研究,並希望達到以 下目標: (1)使用者無需繁瑣的訓練,便能達到較高的準確率; (2)適應性良好, 可適用於任何人; (3)能做到即時分類,使用者可以立刻知道分類結果; (4)穩 定度高,不受雜訊干擾; (5)系統構成相對簡單,可用於殘疾人的環境控制器等 場合。. 1.4 章節安排 本論文分為五章,說明如下:. 第一章針對本論文的背景和腦機介面相關研究與動機做個簡單的介紹,第二 14.
(15) 章以介紹本論文所使用到的設備、方法和理論,第三章說明腦機介面實驗的流程 與討論,第四章探討腦機介面實驗的結果及其分析,第五章則為總結與未來的展 望。. 15.
(16) 第二章 理論與方法 本章主要是介紹實驗所要用到的實驗設備、實驗方法與論文中所用到的理 論,本章的章節安排如下: 2.1 腦電波:介紹腦電波的性質、種類。 2.2 實驗設備:介紹量測腦電波的實驗設備。 2.3 腦電波分析方法:介紹腦機介面處理腦電波所用到的理論和方法。. 2.1 腦電波 Hans Berger 於 1925 年首度紀錄了人類腦電波 EEG(Electroencephalograph), 他發現在紀錄報表上訊號的震盪形式並非完全隨機,而是表現出某種週期性與規 律性,經過了數十年密集的研究後,腦電波之用途已被肯定。. 腦電波的產生是由於腦皮質部神經細胞膜上發生電荷的變化所造成。靜止神 經細胞膜內外正負離子濃度不相等,膜內比膜外電位小 70~80mv,當細胞發生去 極化作用(Depolarization) ,細胞膜外的鈉離子被打入細胞內,使細胞內電位增加, 當達到閾值時,即產生動作電位(Action potential),此時亦稱細胞放電(Cell discharge) 。當細胞發生再極化作用(Repolarization),便可使細胞回到原來的靜 止狀態;如此周而復始的放電反應,便是不斷產生腦電波的來源。. 依據清醒的程度,一般人的腦電波有不同的節律活動(rhythmic activity) ,不 同的動作或想法會產生不同的節律,有關腦電波的性質可由振幅與頻率兩者來表 示: (1)振幅:一般腦電波訊號的振幅介於 10 到 100μV 之間,腦神經細胞的 16.
(17) 動作電位約 110mV,傳至頭皮時只剩數十μV,因此要錄製腦電波尚須 要把電波訊號經類比訊號器放大。 (2)頻率:腦電波依其頻率分佈的範圍主要可分為四種頻帶,如下表格所 示。. 下圖為此四種頻帶類別的腦電波圖。. 圖 2.1 腦電波基本種類的波形. 頻帶. 頻率 [Hz]. δ波(Delta wave). < 3.5. θ波(Theta wave). 4 ~ 7.5. α波(Alpha wave). 8 ~ 13. β波(Beta wave). > 13. 表 2.1 腦電波的基本種類. 17.
(18) 然而腦電波並非全由上類波形所組成,在腦電波文獻裡仍有許多的腦電波被 提出,如棘波(spike wave) 、銳波(sharp wave)、紡錘形波(sigma wave)等, 其中和腦機介面研究最為相關的便是 mu rhythm,mu rhythm 頻率約在 10Hz 左右, 振幅大部分小於 50μV。mu rhythm 的頻率、振幅和α波很類似,但在發生區域 和機制上卻有所不同,mu rhythm 和腦皮層的運動區有關,當有要準備動作的想 法出現時,mu rhythm 就會被抑制,因此在腦機介面的研究當中,mu rhythm 是非 常重要的一部份。. 2.2 實驗設備 本論文的實驗首先從人的頭部以非侵入式方法取得腦電波,並錄到電腦裡進 行數位訊號處理,本論文所用到的工程運算軟體有 MATLAB 和 Simulink,所用 到的設備如下:. (1)電極帽:用來取得自受測者頭皮的腦電波訊號。 (2)訊號放大器(g.BSamp):將電極帽傳來的腦電波訊號處理、放大、儲 存。 (3)即時處理系統(g.RTsys) :將放大後的腦電波訊號進行類比訊號轉數位 訊號處理,做即時的的特徵萃取、運算和分類,並將結果回傳給刺激 裝置。 (4)刺激裝置(g.STIMunit):由螢幕送刺激訊號給受測者,控制整個實驗 的流程。. 18.
(19) g.BSamp. g.STIMunit. g.RTsys 圖 2.2 實驗設備. 2.3 腦電波分析方法 這節中主要是介紹腦機介面系統處理腦電波的過程和方法,文中會依序介紹 Distinction Sensitive Learning Vector Quantization(DSLVQ, [21], [22])、Event-Related Desynchronization / Event-Related Synchronization(ERD / ERS, [20])、線性判別分析 (linear discriminant analysis, LDA, [30])、以及 10×10 混合交叉確認(10×10 cross validation) 。. 19.
(20) 圖 2.3 腦電波分析方法流程圖. 2.3.1 前置處理. 這個部分包括訊號放大、初始濾波和雜訊的移除。在量測腦電波時,錄製到 的訊號並非全來自大腦的電活動,在腦電波中許多電壓的變化可能來自於其他來 源,這些都可稱為雜訊,有來自儀器設備上的或是受測者,如下: (1)週遭環境:周圍的電子儀器可能會導致 50-60 Hz 的雜訊。 (2)受測者:眨眼、眼球轉動、流汗、肌肉的收縮放鬆、身體移動等。 20.
(21) 因為這些雜訊無法直接用濾波器濾除乾淨,所以唯有將有雜訊的腦電波訊號 加以排除不用。. 要在即時的系統上排除掉這些雜訊,需要一個可以偵測雜訊的機制,而這個 機制是根據計算腦電波的頻譜並分析兩個相關的頻帶(i)1-6 Hz 偵測較緩的腦 電波變化,如眨眼所引起的(i i)25-31 Hz 偵測較快的腦電波變化,如肌肉活動 所引起的。首先,我們計算受測者在訓練部分的每段腦電波訊號 1 秒 FFT 的能 量頻譜,再求出整個部分的平均和標準差(如圖 2.4 所示)。每一段用來分類的 腦電波訊號在送到分類器前先檢查這兩個頻帶,而用以區別正常腦電波活動和雜 訊的臨界點就是將平均加上標準差:當每段訊號在相應的 1~6Hz 和 25~31Hz 的 頻帶能量超過臨界點時,會被當作雜訊而排除掉。. 圖 2.4 雜訊偵測器. 21.
(22) 2.3.2 特徵萃取. 有了明確的特徵,才能有效的分辨出腦電波彼此間的差異性。目前國外在腦 機介面的研究上已有不少分析腦電波的論文,他們利用的方法主要有: (1)遲緩 皮層電位、 (2)P300 誘發電位、(3)event-related desynchronization/synchronization (ERD/ERS) 。上述的三種方法用於腦電波分析的優缺點簡單分析如下:. (1)遲緩皮層電位:遲緩皮層電位是早期用來分析腦電波特徵有效的方法 之一,經過多次的訓練,受測者可以透過回授學習產生負的遲緩皮層電 位(如圖 2.5 所示) ,但行成的時間久(數秒鐘)和長久的訓練(80% 以上的正確率需要數個禮拜到數個月的訓練)是主要的缺點。 (2)P300 誘發電位:受測者在接受刺激 300 毫秒後會有一個高峰(如圖 2.6 所示) ,高峰的產生是聽覺、視覺或觸覺的一種無意識反應,此方法的 優點是形成時間短(300 毫秒),且不需要經過任何訓練,缺點是判別 的正確率不高(80%)。. 圖 2.5 遲緩皮層電位. 圖 2.6 P300 誘發電位. (3)ERD/ERS:ERD/ERS 是一種腦電波明顯的特徵,發生在 mu rhythm 和 22.
(23) beta rhythm 中,與運動感覺皮層有關,類似遲緩皮層電位需要訓練,但 訓練的時間較短(數天),且正確率高(可達到 80%以上),所以很適 合運用在腦機介面上。. 綜合以上的分析,ERD/ERS 在處理腦電波訊號上有其優越性,所以本論文 選用 ERD/ERS 來做為萃取腦電波特徵的工具。. 2.3.3 DSLVQ. 在計算 ERD/ERS 前,要先在 mu rhythm 和 beta rhythm 中找出每個受測者的最 佳頻帶,作為帶通濾波器的截止頻率,當選擇到一個良好的受測者特定頻帶,可 提升即時系統分類的正確率。Distinction Sensitive Learning Vector Quantization (DSLVQ)[21], [22]是用來做自動特徵選取的一個既簡單又有效的方法,它是學 習向量量化[23], [24]的改進。. 學習向量量化的分類形式是根據密碼簿向量的數目,把未知的樣本隸屬於其 最接近的密碼簿向量,學習向量量化的學習演算法的目標是找出密碼簿向量在 n 維向量空間的最佳分佈。Flotzinger 等人[16], [25]證明了學習向量量化對於分類每 段的腦電波訊號相當有效,跟其他方法(如 Backpropagation Neural Networks)相 較下,學習向量量化的主要優點在於它的良好歸納能力。. 不同於學習向量量化,DSLVQ 在學習的演算法中利用一個加權的距離函數 去調整每筆輸入資料特徵的重要性,每個特徵的重要性並不一定相同:. 23.
(24) dist (x, y , w ) =. n. ∑ (w [(x i =1. i. − y i )]). 2. i. (2 - 1). 其中 x 為訓練圖樣 y 為密碼簿向量. w 為權重向量. 每個特徵會依其重要性而做調整,最後評估出每個維度的最佳比例係數(權 重) 。在反覆的學習過程中,權重根據分類的結果做改變,在訓練期 t,特徵 n 若是有益於訓練圖樣 x(t ) 的正確分類時, wn 增加;反之,特徵 n 若是有礙於訓練 圖樣 x(t ) 的正確分類時, wn 降低。下面是權重的學習規則(其中 norm 是計算長 度的運算式) :. w (t + 1) = norm(w(t ) + α (t )(norm(nw(t )) − w (t ))). (2 - 2). 它把現在的權重向量 w (t ) 移往新的權重向量 nw(t ) ,學習係數 α (t ) 決定了訓 練重複次數 t,若一個非常小的訓練樣本反覆的出現在分類器裡, α (t ) 會逐漸從 初始值減少至零,再從最後的分類得到權重向量 nw(t ) :. nwi (t ) =. d oi (t ) − d ci (t ). (. ). max d oi (t ), d ci (t ). , 1≤ i ≤ n. (2 - 3). 其中 d ci 為 x(t ) 對應到分類正確最接近的密碼簿向量中第 i 個特徵的單一特徵距離. 24.
(25) d oi 為 x(t ) 對應到分類錯誤最接近的密碼簿向量中第 i 個特徵的單一特徵距離. 經過訓練後的權重向量加強了學習向量量化的分類,它顯示出特徵間和特徵 間的結合對於分類問題是非常重要的,利用 DSLVQ 的權重有助於特徵的選取: 一個低的權重值表示此特徵不是很重要,用於腦機介面系統時,便可將此特徵排 除。. 圖 2.7 二維空間兩群的分類. 例:在一個二維的空間,要將圖樣分為兩個群組,由圖 2.7 可知特徵 2(F2) 是辨別這兩個群組的重要參數,特徵 1(F1)則無法確實的辨別這兩個群組。若 使用大量的密碼簿向量(codebook vectors) ,學習向量量化方法可解決這問題(如 圖 2.7(a)所示) ,但為了能夠壓縮大量的資料,密碼簿向量並無法無限的大, 此時就會產生圖樣的失真(如圖 2.7(b)所示),由於學習向量量化的方法在計 算距離上把兩個特徵視為相等的,造成了分類錯誤,為了改善提升的正確率, DSLVQ 使用權重距離函數,即使是少量的密碼簿向量也可以將圖樣清楚的分成 兩群(如圖 2.7(c)所示) 。 25.
(26) 2.3.4 ERD/ERS. 皮層活動的狀態大致可分為三種: (1)休息或是沒有任何感覺、運動、認知 活動等的空檔狀態; (2)在特定情況下而有資訊處理行為的活化狀態,皮層神經 元受到激發並產生 ERD 的特徵;(3)資訊處理行為下降的去活化狀態,皮層神 經元激發性減少並產生 ERS 的特徵[28]。. 圖 2.8. ERD 計算流程圖. 在感覺和認知的過程以及運動的行為時,不僅會產生 event-related potential (ERP) ,也會有 event-related desynchronization(ERD)或 event-related synchronization (ERS)的現象。ERD、ERS 分別代表節律活動一種短暫且局部振幅的降低或上 升,這些反應是非鎖相的且和頻帶密切相關。相對的,ERP 則是由突觸電位總和 26.
(27) 產生的生物電活動的鎖相反應。典型 ERD 的例子如:在視覺刺激後 alpha rhythm 的抑制以及主動或被動的動作時 mu rhythm 的抑制;典型 ERS 的例子如:在視覺 刺激後 mu rhythm 的增強以及四肢動作時 beta rhythm 的提升。. ERD 的分析完全在時域中處理,計算過程主要包括以下幾個步驟: (1)原始的腦電波訊號(圖 2.10(a))經過帶通濾波器的濾波(圖 2.10(b)) ; (2)濾波過的訊號減掉均值再將振幅的大小平方算出能量(圖 2.10(c)); (3)將每段訊號平均(圖 2.10(d)); (4)最後,量化能量下降(或上升)的百分比得出 ERD(或 ERS) (圖 2.10 (e) ),公式如下:. ERD =. A−R × 100(% ) R. (2 - 4). 其中 A 為活動週期的總能量 R 為參考週期的總能量. 圖 2.9 活動週期視窗的移動. 活動週期是一個 1 秒的視窗區間(如圖 2.9 所示) ,參考週期是第 0.5 秒到 1.5 秒,連續 ERD 是藉由 1 秒(8 點)的活動週期視窗移動,重疊 0.25 秒(2 點)的 27.
(28) 計算結果。. 圖 2.10 ERD 的計算過程. 2.3.5 線性判別分析. 所謂判別分析法(discriminant analysis),是在已知的分類之下,一旦遇到有 新的樣本時,可以利用此法選定一判別標準,以判定如何將新樣本放置於哪個類 別中,而線性判別分析(Linear Discriminant Analysis, LDA) ,是我們判別腦電波形 態的主要工具。分類器會因為輸入資料空間維度的增加,而造成設計上困難度的 急速增加,為了解決這個問題,可以在進行分類演算法之前先降低輸入資料的維 度。Fisher discriminant[30]就是一個針對降低最佳線性維度的方法,因此嚴格的來 說,Fisher discriminant 並不算一個分類器,但無疑地它可以大大的降低運算量、 提升分類速度。. 28.
(29) 一個簡單降低維度的方法,就是把資料線性投射到一維的空間上。例如將一 個輸入向量投射到一個值 y 上:. y = wTx. (2 - 5). 其中 x 為輸入向量 w 為可調整的權重參數向量 y 為投射後的值. 一般來說,投射到一維的空間上會導致相當大的資訊失真,且在原本維度空 間被分離的族群將會在一維上發生重疊,然而,藉由權重向量 w 的成份,可以選 擇使族群分離最大的投射。. 考慮到兩個族群的分類:第一個群族 C1 有 N1 個點,第二個群族 C 2 有 N 2 個 點,兩個族群的平均值向量分別是 m1 和 m 2 :. m1 =. 1 N1. ∑x. n∈C1. n. ,. m2 =. 1 N2. ∑x. n∈C2. (2 - 6). n. 族群投射到 w 的分隔,可看作是族群投射後平均值的分隔,因此,我們可以 選擇 w 使. m2 − m1 = w T (m 2 − m1 ). (2 - 7). 最大化,其中. 29.
(30) mk = w T m k. (2 - 8). 是族群 C k 經過投射後族群的平均值,然而,上式可任意的被放大只要增加 w 的 大小,為了解決這個問題,要把 w 限制在單位長度,以至於 ∑i wi2 = 1 ,再利用 Lagrange 乘數(附錄)執行有限制的最大化,可以發現到 w 正比於 (m 2 − m 1 ) 。. 圖 2.11 兩個族群的分佈. 此外,還有另一個問題(如圖 2.11 所示) ,兩個族群在原本的二維空間 ( x1 , x 2 ) 是完全的分隔開,投射後的族群平均值若投射在 x1 軸會比投射在 x2 軸分隔的距 離較大,不過,投射後的資料若投射在 x 2 軸會比投射在 x1 軸分隔的情況較好, 這個差異是由於族群範圍往兩個軸延伸的方向所引起的,Fisher 提出一個解決辦 法,把代表投射後群族平均值間的差異的函數最大化,再取族群範圍散佈單位正 規化。. 投射公式(2-5)將 x 內標記的資料轉換到一維空間 y ,族群 C k 轉換後資料 的族群範圍分佈(within-class scatter)可視為族群範圍協方差(within-class. 30.
(31) covariance) :. s k2 =. ∑ (y. n∈C k. − mk ). 2. n. (2 - 9). 因此,對於圖 2.11 全體資料的全體族群範圍協方差可定義成 s12 + s 22 ,最後得出 Fisher 準則:. J (w ) =. (m2 − m1 )2. (2 - 10). s12 + s 22. 再利用公式(2-5) 、 (2-8)和(2-9)把 Fisher 準則改寫成與 w 相關的形式:. J (w ) =. w TS B w w T SW w. (2 - 11). 其中 S B 是族群間(between-class)協方差矩陣:. S B = (m 2 − m1 )(m 2 − m1 ). T. (2 - 12). 以及 S W 是全體族群範圍協方差矩陣:. SW =. ∑ (x. n∈C1. n. − m 1 )(x n − m1 ) + T. ∑ (x. n∈C 2. n. − m 2 )(x n − m 2 ). T. 對和 w 相關的公式(2-11)微分,得出 J (w ) 最大值發生在. 31. (2 - 13).
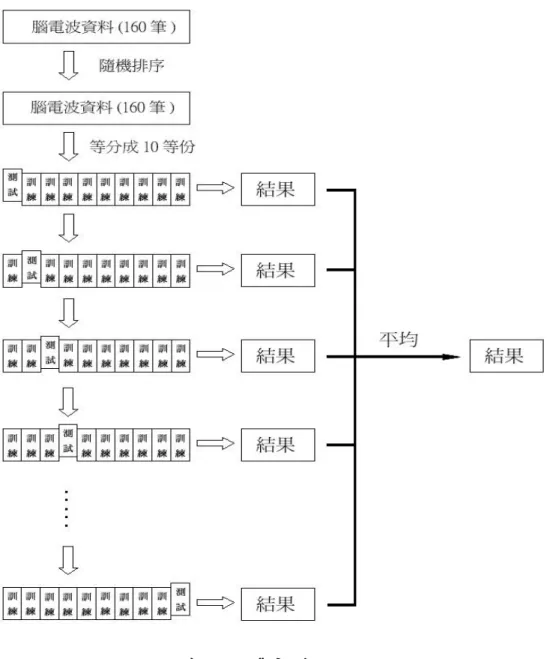
(32) (w. T. ). (. ). S B w SW w = w T SW w S B w. (2 - 14). 從公式(2-12)可以發現到 S B w 總是在 (m 2 − m1 ) 的方向,此外,不用考慮 w 的大 小,只要注意它的方向,因此,忽略大小的係數,公式(2-14)等號兩邊同時乘 上 S W−1 可以得出以下結論:. w ∝ S W−1 (m 2 − m 1 ). (2 - 15). 這就是所謂的 Fisher 線性判別式,儘管嚴格來說與其說它是一個判別式,倒不如 說是資料投射到一維時對特定方向的選擇。若族群範圍協方差是等向的,則 SW 正 比於單位矩陣,且 w 正比於族群平均值的差,此結果正如前面所討論一樣。藉由 選擇一個適當的臨界點 y 0 ,投射後的資料可以用來建構判別式。若 y (x ) ≥ y 0 ,則 此筆資料分類到 C1 ,反之,則被分類到 C 2 。. 2.3.6 10×10 混合交叉確認. 10×10 混合交叉確認是把資料隨機的混合再等分成十等份,一等份做測試資 料,剩下的九等份做訓練資料。訓練資料是用來計算分類器的參數,測試資料則 用來測試分類器的正確性,依序拿出十等份的一等份做測試,因此會產生十個不 同的錯誤率,並將十次的結果加以平均(如圖 2.12 所示) ,此步驟稱之為 10 混合 交叉確認(10-fold cross validation)。. 32.
(33) 圖 2.12 10 混合交叉確認. 為了更進一步提升評估正確率的可靠度,相同的步驟重複十次,最後一樣再 把所有的錯誤率平均(總共 100 次) ,稱之為 10×10 混合交叉確認(10×10-fold cross validation) 。. 33.
(34) 第三章 實驗流程 本章主要在介紹腦機介面實驗的流程和實驗情形,章節安排如下: 3.1 腦電波錄製:介紹腦電波錄製的模式。 3.2 實驗設計:介紹實驗的流程。 3.3 腦機介面之訓練部分:介紹訓練實驗的實驗情形。 3.4 受測者的有效頻帶:利用 DSLVQ 選擇受測者的有效頻帶。 3.5 分類器的計算:利用 LDA 計算出分類器。 3.6 腦機介面之回授部分:介紹回授實驗的實驗情形。. 3.1 腦電波錄製 腦電波記錄模式可分為雙極(bipolar)和單極(unipolar),雙極記錄模式量 測頭殼上兩點間電位的變化,記錄通道間並無共同參考點;單極記錄模式則於所 有通道間採用同一參考點。本實驗腦電波是用雙極的模式記錄。經由訊號放大器 將訊號放大和 0.5 到 30 Hz 的濾波,取樣頻率為 128 Hz。記錄位置又依實驗想像 動作的不同,分為兩種:. (1)想像左手動和想像右手動:記錄的電極為 GND、FC3、FC4、CP3、 CP4(如圖 3.1 所示) 。C3 的位置是右手在頭部的感覺運動區,所以利 用靠近 C3 的 FC3、CP3 兩個電極來測量想像右手動時大腦的局部變 化,相對的,C4 的位置是左手在頭部的感覺運動區,所以利用靠近 C4 的 FC4、CP4 兩個電極來測量想像左手動時大腦的局部變化。 (2)想像左腳動和想像右手動:記錄的電極為 GND、FC3、FCZ、CP3、 CPZ。同理,CZ 的位置是雙腳在頭部的感覺運動區,所以利用靠近. 34.
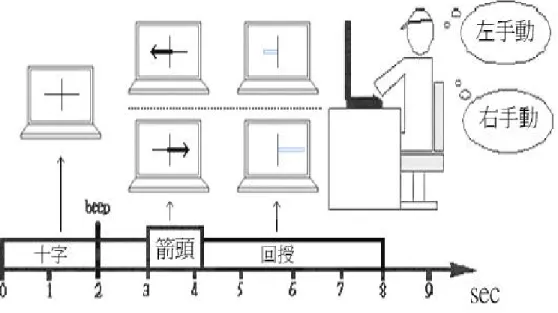
(35) CZ 的 FCZ、CPZ 兩個電極來測量想像雙腳動時大腦的局部變化,並 利用 FC3、CP3 兩個電極來測量想像右手動時大腦的局部變化。. 圖 3.1 腦電波電極分佈圖. 3.2 實驗設計 共 29 位受測者參與本實驗,25 位男性,4 位女性,平均年齡為 23.48 歲, 標準差為 4.21 歲,受測者皆無接受任何藥物的治療和中樞神經系統方面的異常, 且無參加過腦機介面實驗的經驗。受測者坐在一張舒適的的扶手椅上,距離電腦 螢幕約 100 公分,並被要求身體不要有任何大的動作,保持全身放輕鬆的狀態, 螢幕中央會出現箭頭(往左或往右),受測者根據箭頭的方向,想像左手動或右 35.
(36) 手動。實驗前,受測者皆有練習的機會,並依照螢幕上箭頭的方向實際的移動左 手或右手。. 腦機介面實驗分為兩個部分,訓練部分和回授部份(如圖 3.2 所示),實驗 過程各約 20 到 30 分鐘,每個部分皆分為四次,每次中間會有短暫的休息,一次 有 40 段隨機的箭頭方向(20 個朝左的箭頭,20 個朝右的箭頭) ,每段持續 8 秒, 間隔 0.5 到 2.5 秒不等後(避免受測者有預期心理),出現下一段。. (1)訓練部分:記錄下受測者的腦電波,讓腦機介面系統學習找出受測者 的特徵,建立一個受測者特定的分類器。 (2)回授部份:有了分類器後,便可用分類器去分類受測者想像動作時的 腦電波,經由回授,受測者能即時的得知分類結果,並根據回授的結果 調整腦部的活動,可以預期的,因為有了回授,分類的正確率將會隨著 測試次數的增加而有所提升。. 圖 3.2 腦機介面實驗的兩個部份. 36.
(37) 3.3 腦機實驗之訓練部分 實驗一開始,電腦螢幕中央所出現的是一個固定的十字(如圖 3.3 所示) ,2 秒後,會發出嗶聲做為提醒受測者的通知,第 3 秒時,螢幕上隨機的出現左箭頭 或右箭頭,並持續 5 秒鐘,受測者依指示的方向想像左手動或右手動直到箭頭消 失。間隔 0.5 到 2.5 秒後(間隔的時間是隨機的) ,又是下一段的開始,受測者不 斷的重複相同的動作,藉以取得一致的腦電波訊號。下圖為完整一段(8 秒)的 時間表:. 圖 3.3 訓練部份的每段觸發訊號時間表. 錄下腦電波後,就是特徵的計算,從原始的腦電波資料擷取出每段欲分析的 訊號(嗶聲前兩秒至箭頭消失,共 8 秒),總共會有 160 段,經過帶通濾波器選 出特定的頻帶(利用 DSLVQ 選擇頻帶的方法將在 3.4 節說明),再計算 ERD, 量化特徵,將這些特徵加以分類後,訓練出來的分類器即可做為回授部分即時分 37.
(38) 類用(分類器的計算將在 3.5 節說明)。. 圖 3.4 訓練部分到回授部分的流程圖. 3.4 受測者的有效頻帶 由 DSLVQ 的方法可以找出受測者最相關的頻帶,利用權重距離函數以及在 監督學習中調整不同特徵的重要性,權重向量 w = (w1 , w2 ,..., wN ) 在每次的學習過 程中會不斷更新它的值:若特徵 i 有助於正確的分類,則權重 wi 的值就會跟著增 加,反之, wi 就減少。權重的改變在於特徵的明確性以及可比較特徵的數量。 若分類正確的特徵數目越少,則這些特徵就越重要[13]。. DSLVQ 演算法裡的特徵向量包含了 40 個維度(2 個頻道訊號 × 20 個頻率 38.
(39) 成分) ,其中,2 個頻道訊號是 FC3-CP3 頻道和 FC4-CP4 頻道,20 個頻率成分是 由每段訊號的第 3.25 ~ 4.25 秒的能量頻譜,從 8 ~ 27 Hz 的頻帶中個別取出 1Hz 的值(共 20 個) ,選 8 ~ 27 Hz 是因為這個範圍包含了 mu 頻帶和 beta 頻帶,而 mu 頻帶和 beta 頻帶也是動作相關的最大反應產生區。每個頻率成分是將每段腦 電波訊號經過快速複立葉轉換(FFT)轉換到頻域所求得。我們在 DSLVQ 用了 6 個密碼簿向量,學習速度α 的初始值設為 0.05 並在每次的學習過程中會逐漸遞 減至零。在訓練前,為了補償個別絕對能量值的相關差異,先將資料平均值調整 至零,變異調整至 1。. DSLVQ 的權重值顯示了鄰近的頻率成分往往同樣的重要,這說明了相關頻 率頻帶是比 1 Hz 要寬,然而,1 Hz 頻率成分的解析度似乎對獲得帶通濾波的最 佳截止頻率是必要的。由 DSLVQ 的權重值,可以找出每個受測者的有效頻帶, 值得注意的是,頻帶選取要比較 C3、C4 兩個頻道(兩個頻帶範圍要相同),當 兩個選取的頻率成分不一樣時,則選取較寬的頻帶。. 3.5 分類器的計算 分類器的主要目的是能夠分辨出輸入資料的不同腦電波形態(想像左手動以 及想像右手動) ,因此要產生回授的結果前,得先計算出分類器的權重參數。之 後,只要把輸入資料和分類器參數加權計算,就能清楚的判別出輸入資料的類 別。計算分類器參數的輸入特徵是取自腦電波兩個頻帶的能量係數,根據這 4 個特徵(2 個頻道 × 2 個頻帶) ,其中,2 個頻道是 FC3-CP3 頻道和 FC4-CP4 頻 道,2 個頻帶是 mu 頻帶和 beta 頻帶的能量值,根據第一部分所錄下的 160 段腦 電波資料,利用線性判別式分析(LDA)訓練出分類器權重參數。受測者就能在. 39.
(40) 下一部分的實驗即時的得到回授結果。. 3.6 腦機實驗之回授部分 與訓練部份最大的差異,回授部份加入了回授,腦機介面系統會偵測腦電波 樣本,並做即時的分析和判別,讓受測者可以觀察到想像的結果。. 圖 3.5 產生回授的流程圖. 一開始,電腦螢幕中央一樣出現固定的十字(如圖 3.6 所示) ,2 秒後,發出 嗶聲做為提醒受測者的通知,第 3 秒時,螢幕上隨機的出現左箭頭或右箭頭,但 和訓練部分不同的是箭頭只持續 1.25 秒,受測者依指示的方向想像左手動或右 手動直到箭頭消失,在第 4.25 秒箭頭消失到第 8 秒這一段 3.75 秒的時間,分類 的結果會以水平橫條的形式出現在螢幕的中央,即時反應受測者的腦電波分析結 果,並會不斷的更新最新的結果。. 40.
(41) 圖 3.6 回授部份的每段觸發訊號時間表. 螢幕的的橫條(長度會改變)是特徵向量乘上分類器權重向量的結果,若結 果是正的,則橫條會往左跑;若結果是負的,則橫條會往右跑。橫條的長度則根 據結果的絕對值而改變。回授部份的主要目的,就是訓練受測者將橫條移往正確 的方向,並盡可能的延伸到螢幕的邊緣。. 41.
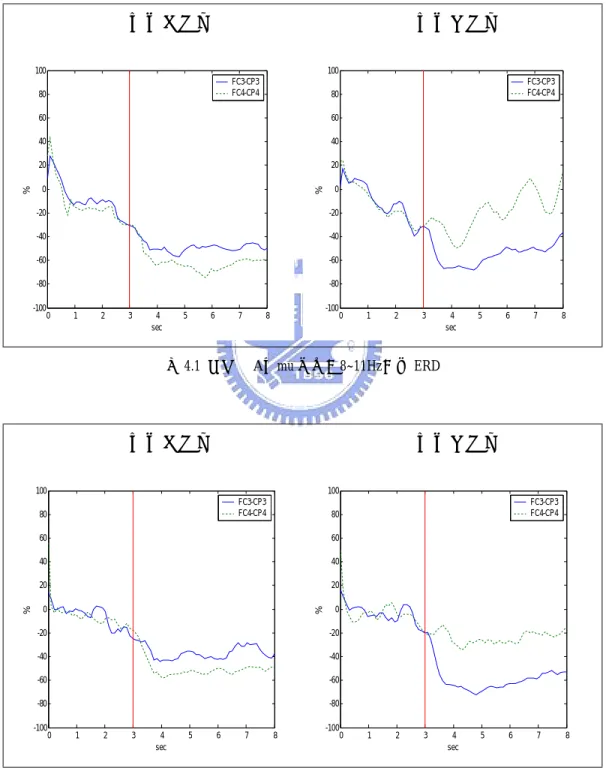
(42) 第四章 實驗結果 上一章我們介紹了整個實驗的流程,而實驗的結果我們在本章一一作介紹和 探討,本章章節安排如下: 4.1 ERD 的結果:觀察受測者想像動作時 ERD 的變化。 4.2 最佳化頻帶:觀察受測者的頻帶分佈。 4.3 分類器的選擇:選擇受測者在回授實驗的分類器。 4.4 錯誤率比較與結果分析:對頻帶選擇、想像動作、有無回授、實驗次數 等的錯誤率比較。. 4.1 ERD 的結果 腦電波包含了局部以及非局部的節律成分,局部成分可被視為特定皮層範圍 的固有活動,非局部的(總體的)腦電波成分大都是非特定皮層範圍所產生且遍 佈於頭皮的各個區域。感覺運動節律就是典型的局部腦電波節律,局部腦電波節 律有個明顯的特徵,就是他們特定潛在神經網路狀態的封閉作用關係,當此區開 始活化時,在 mu 和 beta 頻帶的節律活動就會產生一種振幅降低的現象(ERD), 當皮層區沒有任何模式的活動時,就會產生振幅增加的現象(ERS)。. 實驗所錄下的腦電波訊號,可計算出 ERD,下圖 4.1~4.6 為三位不同受測者 的 ERD 結果圖,左半邊是想像左手動,右半邊是想像右手動,並在計算 ERD 前 利用 DSLVQ 的方法(詳細結果在 4.2 節)找出各個受測者的最佳頻帶(mu 頻帶 和 beta 頻帶各找出一段) 。不同的受測者,頻帶的位置、範圍也不同,這也說明 了選擇頻帶的對於 ERD 結果的重要性。. 42.
(43) 圖 4.1~4.6 是 FC3-CP3 和 FC4-CP4 兩個頻道在想像左右手動時的 ERD(ERD 的計算過程在 2.3.4 節中有介紹),第 3 秒到第 8 秒是箭頭出現的時間:. 想像左手動. 想像右手動. 100. 100 FC3-CP3 FC4-CP4. 60. 60. 40. 40. 20. 20. 0. 0. -20. -20. -40. -40. -60. -60. -80. -80. -100. 0. 1. 2. 3. 4 sec. 5. 6. 7. FC3-CP3 FC4-CP4. 80. %. %. 80. -100. 8. 0. 1. 2. 3. 4 sec. 5. 6. 7. 8. 圖 4.1 受測者 A,mu 頻帶(8~11Hz)的 ERD. 想像左手動. 想像右手動. 100. 100 FC3-CP3 FC4-CP4. 60. 60. 40. 40. 20. 20. 0. 0. -20. -20. -40. -40. -60. -60. -80. -80. -100. 0. 1. 2. 3. 4 sec. 5. 6. 7. FC3-CP3 FC4-CP4. 80. %. %. 80. -100. 8. 0. 1. 2. 3. 圖 4.2 受測者 A,beta 頻帶(18~21Hz)的 ERD. 43. 4 sec. 5. 6. 7. 8.
(44) 想像左手動. 想像右手動. 100. 100 FC3-CP3 FC4-CP4. 60. 60. 40. 40. 20. 20. 0. 0. -20. -20. -40. -40. -60. -60. -80. -80. -100. 0. 1. 2. 3. 4 sec. 5. 6. 7. FC3-CP3 FC4-CP4. 80. %. %. 80. -100. 8. 0. 1. 2. 3. 4 sec. 5. 6. 7. 8. 圖 4.3 受測者 B,mu 頻帶(11~13Hz)的 ERD. 想像左手動. 想像右手動. 100. 100 FC3-CP3 FC4-CP4. 60. 60. 40. 40. 20. 20. 0. 0. -20. -20. -40. -40. -60. -60. -80. -80. -100. 0. 1. 2. 3. 4 sec. 5. 6. 7. FC3-CP3 FC4-CP4. 80. %. %. 80. -100. 8. 0. 1. 2. 3. 圖 4.4 受測者 B,beta 頻帶(17~22Hz)的 ERD. 44. 4 sec. 5. 6. 7. 8.
(45) 想像左手動. 想像右手動. 100. 100 FC3-CP3 FC4-CP4. 60. 60. 40. 40. 20. 20. 0. 0. -20. -20. -40. -40. -60. -60. -80. -80. -100. 0. 1. 2. 3. 4 sec. 5. 6. 7. FC3-CP3 FC4-CP4. 80. %. %. 80. -100. 8. 0. 1. 2. 3. 4 sec. 5. 6. 7. 8. 圖 4.5 受測者 C,mu 頻帶(8~12Hz)的 ERD. 想像左手動. 想像右手動. 100. 100 FC3-CP3 FC4-CP4. 60. 60. 40. 40. 20. 20. 0. 0. -20. -20. -40. -40. -60. -60. -80. -80. -100. 0. 1. 2. 3. 4 sec. 5. 6. 7. FC3-CP3 FC4-CP4. 80. %. %. 80. -100. 8. 0. 1. 2. 3. 4 sec. 5. 6. 7. 8. 圖 4.6 受測者 C,beta 頻帶(19~24Hz)的 ERD. 為了觀察 FC3-CP3 和 FC4-CP4 兩個頻道在想像左右手動時 ERD 下降的幅度 和之間的差異,我們把第 3 秒到第 8 秒的 ERD 取平均,得出以下結果:. 45.
(46) mu 頻帶 想像動作. 想像左手動. 想像右手動. 頻道. FC3-CP3 頻道. FC4-CP4 頻道. FC3-CP3 頻道. FC4-CP4 頻道. 受測者 A. 48.14%. 60.23%. 50.60%. 12.69%. 受測者 B. 76.01%. 87.41%. 87.07%. 78.59%. 受測者 C. 51.28%. 61.15%. 71.28%. 64.55%. beta 頻帶 想像動作. 想像左手動. 想像右手動. 頻道. FC3-CP3 頻道. FC4-CP4 頻道. FC3-CP3 頻道. FC4-CP4 頻道. 受測者 A. 39.97%. 48.90%. 58.92%. 25.04%. 受測者 B. 53.14%. 64.85%. 70.56%. 50.80%. 受測者 C. 22.32%. 31.70%. 43.37%. 36.60%. 表 4.1 ERD 平均下降幅度. 在想像時,ERD 會顯示出空間局部化的差異,想像左手動時(圖 4.1~4.6 的 左半部) ,大腦主要的反應區是在右腦,因此右腦 FC4-CP4 頻道訊號的 ERD(實 線)會下降得較明顯,同理,想像右手動時(圖 4.1~4.6 的右半部) ,大腦主要的 反應區是在左腦,因此左腦 FC3-CP3 頻道訊號的 ERD(虛線)會下降得較明顯。 這些差異正是腦機介面系統辨別輸入腦電波訊號所需要的重要特徵。而 FC3-CP3 和 FC4-CP4 的距離越大時,表示差異越大,特徵也就越明顯,分類器也就越容易 辨別。反之,若距離接近,表示差異越小,分類器也就容易判別錯誤。觀察圖 4.1 到 4.6,可以看出受測者 A 的差異最為明顯,因此,可以預期到受測者 A 的 分類器會有較高的正確率(如圖 4.16 所示)。. 46.
(47) 4.2 最佳化頻帶 在分類器特徵選取的方面,找出相關的最佳頻帶是一項很重要的工作,適當 的特徵將有助於系統效能的提升。然而每位受測者的頻帶不盡相同,因此,為每 位受測者個別找出專屬特定的頻帶是必要的。. 利用 DSLVQ 的方法,可以看出每個頻率成分的重要性(相對的權重值越高 越重要) ,藉由觀察權重值的大小,我們便能輕易找出每位受測者的最佳頻帶。 由以下幾張 DSLVQ 的權重值(圖 4.7~4.15)可以看出來,每位受測者的頻帶範 圍並不一定相同:受測者 A 在 C3 頻道的 mu 頻帶(8~11Hz)有較高的權重值, beta 頻帶(18~21Hz)則是在 C4 頻道較明顯;受測者 B 的 mu 頻帶(11~13Hz) 和 beta 頻帶(17~22Hz)在 C3 頻道有較明顯高的值,不過最大值則是出現在 C4 頻道的 mu 頻帶(13Hz) ;受測者 C 的 mu 頻帶在 C3 及 C4 皆有較明顯的值出現, beta 頻帶也分別在 C3 及 C4 皆有較明顯的值。. 將 C3 和 C4 頻道的權重值相互比較後(為了即時回授的須要,兩個頻道的 範圍要相同) ,我們找出每位受測者的最佳頻帶範圍:. mu 頻帶. beta 頻帶. 受測者 A. 8~11Hz. 18~21Hz. 受測者 B. 11~13Hz. 17~22Hz. 受測者 C. 8~12Hz. 19~24Hz. 表 4.2 受測者的最佳頻帶範圍. 其中,圖 4.9、4.12、4.15 黑色格子是權重值較高的頻率成分,灰色格子則是. 47.
(48) 為了使 C3、C4 對稱而增加的部分。. 0.35. 0.3. weight values. 0.25. 0.2. 0.15. 0.1. 0.05. 0. 5. 10. 15. 20. 25. 30. 20. 25. 30. frequency. 0.14. 0.12. weight values. 0.1. 0.08. 0.06. 0.04. 0.02. 0. 5. 10. 15 frequency. 圖 4.8 受測者 A,DSLVQ 的權重值(C4 頻道). 圖 4.9 受測者 A,選擇的頻帶(8~11 Hz,18~21 Hz). 48.
(49) 0.12. 0.1. weight values. 0.08. 0.06. 0.04. 0.02. 0. 5. 10. 15. 20. 25. 30. frequency. 圖 4.10 受測者 B,DSLVQ 的權重值(C3 頻道). 0.35. 0.3. weight values. 0.25. 0.2. 0.15. 0.1. 0.05. 0. 5. 10. 15. 20. 25. frequency. 圖 4.11 受測者 B,DSLVQ 的權重值(C4 頻道). 圖 4.12 受測者 B,選擇的頻帶(11~13 Hz,17~22 Hz). 49. 30.
(50) 0.18 0.16 0.14. weight values. 0.12 0.1 0.08 0.06 0.04 0.02 0. 5. 10. 15. 20. 25. 30. frequency. 圖 4.13 受測者 C,DSLVQ 的權重值(C3 頻道). 0.35. 0.3. weight values. 0.25. 0.2. 0.15. 0.1. 0.05. 0. 5. 10. 15. 20. 25. frequency. 圖 4.14 受測者 C,DSLVQ 的權重值(C4 頻道). 圖 4.15 受測者 C,選擇的頻帶(8~12 Hz,19~24 Hz). 50. 30.
(51) 4.3 分類器的選擇 腦機介面實驗的兩個部分:第一個部分,是為了建立一個受測者特有的分類 器;另一個部分,這個特有的分類器就能即時的分類出受測者想像的動作。因此, 分類器的好壞,將是決定下一部分實驗分類結果的重要因素。. 不同時間點的腦電波會有不同的特徵,所以產生的分類器也會有不同的參 數,至於要選哪一個做為即時實驗的分類器,需要有一個評斷的標準,因此,我 們利用 10×10 混合交叉確認(10×10-fold cross validation)的方法計算出分類器分 類的正確率,以評估分類器的適用性:腦機實驗訓練部分的腦電波資料一次共有 160 段,隨機的選取 144 段計算分類器的參數,剩下的 16 段做為測試分類器以計 算判別錯誤率,重複 100 次相同的步驟後再加以平均求出最後的結果(如圖 4.16 所示) 。. 圖 4.16 受測者 A、B、C 的錯誤率. 51.
(52) 圖 4.17 受測者 A、B、C 的標準差. 一段 8 秒的腦電波訊號每隔 0.5 秒取一次特徵,所以共會產生 16 個分類器, 因為一次是拿一整段(8 秒)的訊號加以分析,所以箭頭未出現前的 3 秒也會有 錯誤率,但這 3 秒(前 6 個分類器)是受測者還是處於放鬆狀態,所以只考慮後 面 10 個分類器,觀察圖 4.16 三位受測者的錯誤率,分類器錯誤率最低的分別發 生在:受測者 A 的第 5 秒、受測者 B 的第 5 秒、受測者 C 的第 4 秒,這三個分 類器便拿來作該受測者下一部分的腦機回授實驗分類用。. 4.4 錯誤率比較與結果分析 頻帶的選擇、想像的動作、有無回授、實驗的次數,這些條件都會影響到分 類器錯誤率的高低,因此,我們做了以下的實驗,希望藉由實驗結果以找出降低 錯誤率的方法。4.4.1 節比較想像動作和實際動作的差異;4.4.2 節比較固定頻帶 和受測者特定頻帶的差異;4.4.3 節比較想像左右手動作和想像手腳動作的差異; 4.4.4 節比較實驗次數的差異;4.4.5 節比較有無回授的差異:. 52.
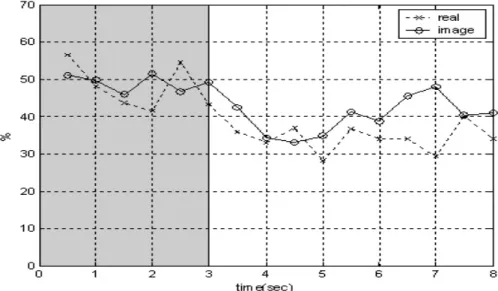
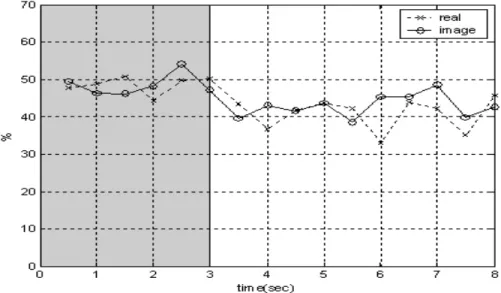
(53) 4.4.1 實際動作和想像動作. 想像動作可視為一種在腦中默想動作的行為,而沒有真正的動作輸出。在想 像動作時,也會在感覺運動區產生神經活化的現象,產生所謂的 ERD。. 圖 4.18 受測者 C,實際動作(虛線)和想像動作(實線)的錯誤率. 圖 4.19 受測者 C,實際動作(虛線)和想像動作(實線)的標準差 53.
(54) 圖 4.20 受測者 D,實際動作(虛線)和想像動作(實線)的錯誤率. 圖 4.21 受測者 D,實際動作(虛線)和想像動作(實線)的標準差. 實際動作. 想像動作. 受測者 C. 44.37%~30.56%. 47.55%~33.25%. 受測者 D. 40.00%~28.18%. 49.68%~32.18%. 受測者 E. 45.75%~33.08%. 48.33%~39.16%. 表 4.3 實際動作和想像動作的錯誤率分佈(第 3 秒~第 8 秒間) 54.
(55) 圖 4.22 受測者 E,實際動作(虛線)和想像動作(實線)的錯誤率. 圖 4.23 受測者 E,實際動作(虛線)和想像動作(實線)的標準差. 由圖 4.18、4.20、4.22 比較實際動作(虛線)和想像動作(實線)的錯誤率, 可以觀察出 3 位受測者在箭頭出現後(第 3 秒後),錯誤率皆明顯的下降。這也 證明了想像動作時的腦電波,的確在時間與空間上產生不一樣的活化形態。若透 過訓練,相信可以讓此特徵更加的明顯,使錯誤率更加下降。. 55.
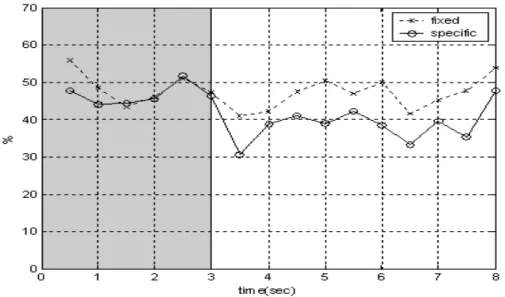
(56) 4.4.2 固定頻帶和受測者特定頻帶. 感覺運動區的頻帶主要是 mu 頻帶和 beta 頻帶的前段,因此我們取 10~12Hz (mu 頻帶)和 16~24Hz(beta 頻帶的前段)做為基準(虛線),再利用 DSLVQ 分別找出各個受測者的特定頻帶做比較。. 圖 4.24 受測者 F,固定頻帶(虛線)和特定頻帶(實線)的錯誤率. 圖 4.25 受測者 F,固定頻帶(虛線)和特定頻帶(實線)的標準差. 56.
(57) 圖 4.26 受測者 G,固定頻帶(虛線)和特定頻帶(實線)的錯誤率. 圖 4.27 受測者 G,固定頻帶(虛線)和特定頻帶(實線)的標準差. 固定頻帶. 特定頻帶. 受測者 F. 54.56%~45.68%. 48.62%~36.62%(8~14Hz 及 16~20Hz). 受測者 G. 53.87%~41. 12%. 47.79%~30.55%(10~14Hz 及 21~23Hz). 受測者 H. 49.93%~38.68%. 51.37%~34.25%(8~13Hz 及 14~25Hz). 表 4.4 固定頻帶和受測者特定頻帶的錯誤率分佈(第 3 秒~第 8 秒間). 57.
(58) 圖 4.28 受測者 H,固定頻帶(虛線)和特定頻帶(實線)的錯誤率. 圖 4.29 受測者 H,固定頻帶(虛線)和特定頻帶(實線)的標準差. 由圖 4.24、4.26、4.28 比較固定頻帶(虛線)和受測者特定頻帶(實線)的 錯誤率,可以觀察出頻帶位置或範圍的些許變化,導致分類的結果也大不相同。 和固定頻帶相較下,特定頻帶的分類器的錯誤率普遍較低,這證實了想像動作時 神經活化的頻帶的確是因人而異的,找出受測者特定的頻帶,就能找出分辨想像 時腦電波的明顯特徵,降低錯誤率。. 58.
(59) 4.4.3 想像左右手動作和想像手腳動作. 以下三位受測者做了兩次實驗。第一次實驗:每當左箭頭出現時,受測者想 像左手動,當右箭頭出現時,想像右手動;第二次實驗:每當左箭頭出現時,受 測者想像左腳動,當右箭頭出現時,想像右手動。最後比較兩次的實驗結果。. 圖 4.30 受測者 I,想像左右手動作(虛線)和手腳動作(實線)的錯誤率. 圖 4.31 受測者 I,想像左右手動作(虛線)和手腳動作(實線)的標準差. 59.
(60) 圖 4.32 受測者 J,想像左右手動作(虛線)和手腳動作(實線)的錯誤率. 圖 4.33 受測者 J,想像左右手動作(虛線)和手腳動作(實線)的標準差. 想像左右手. 想像手腳. 受測者 I. 50.62%~36.25%. 47.43%~30.37%. 受測者 J. 54.31%~32.56%. 45.18%~25.93%. 受測者 K. 39.12%~29.50%. 41.06%~27.00%. 表 4.5 想像左右手動作和手腳動作的錯誤率分佈(第 3 秒~第 8 秒間). 60.
(61) 圖 4.34 受測者 K,想像左右手動作(虛線)和手腳動作(實線)的錯誤率. 圖 4.35 受測者 K,想像左右手動作(虛線)和手腳動作(實線)的標準差. 由圖 4.30、4.32、4.34 比較想像左右手(虛線)和想像手腳(實線)的錯誤 率,可以觀察出想像手腳可以產生比想像左右手還要低的錯誤率,這是因為手部 的活動牽涉到較少的肌梭(牽張感受器),而腳部的活動需要較大量的肌纖維和 神經纖維,相對地會有更多數量的皮層神經細胞會被活化,因此腳部的活動比手 部的活動會產生更明顯的特徵,而特徵越明顯時錯誤率也就越低。. 61.
(62) 4.4.4 實驗次數的增加. 以下三位受測者接受第一次實驗時,錯誤率約在 50%到 35%之間,我們希 望藉由實驗次數的增加,觀察受測者的錯誤率是否有下降的趨勢。. 圖 4.36 受測者 L,三次實驗的錯誤率. 圖 4.37 受測者 L,三次實驗的標準差. 62.
(63) 圖 4.38 受測者 M,三次實驗的錯誤率. 圖 4.39 受測者 M,三次實驗的標準差. 實驗一. 實驗二. 實驗三. 受測者 L. 49.12%~37.93%. 50.00%~34.25%. 50.62%~29.00%. 受測者 M. 50.37%~35.75%. 48.62%~30.68%. 44.68%~27.75%. 受測者 N. 50.50%~38.87%. 48.68%~32.50%. 45.81%~33.87%. 表 4.6 三次實驗的錯誤率分佈(第 3 秒~第 8 秒間) 63.
(64) 圖 4.40 受測者 N,三次實驗的錯誤率. 圖 4.41 受測者 N,三次實驗的標準差. 經過三次的實驗後,三位受測者的錯誤率均有改善,且整體錯誤率也有明顯 下降的趨勢。值得注意的是,受測者 N 在三次實驗中最低的錯誤率是發生在第 二次實驗而不是第三次實驗,這說明了藉由實驗次數的增加,讓受測者越來越熟 悉實驗的狀況,的確是可以降低錯誤率的發生,但錯誤率的改善並不一定和實驗 的次數成正比。. 64.
(65) 4.4.5 無回授和有回授. 在腦機介面系統裡,回授被視為一個必要的指標,回授可以引起受測者的興 趣和專注,進而改善分類的正確率。. 圖 4.42 受測者 O,無回授(虛線)和有回授(實線)的錯誤率. 圖 4.43 受測者 O,無回授(虛線)和有回授(實線)的標準差. 65.
(66) 圖 4.44 受測者 P,無回授(虛線)和有回授(實線)的錯誤率. 圖 4.45 受測者 P,無回授(虛線)和有回授(實線)的標準差. 無回授. 有回授. 受測者 O. 48.06%~36.37%. 42.50%~31.87%. 受測者 P. 49.62%~32.31%. 38.37%~27.37%. 受測者 Q. 57.18%~37.18%. 40.37%~28.75%. 表 4.7 無回授和有回授的錯誤率分佈(第 3 秒~第 8 秒間). 66.
(67) 圖 4.46 受測者 Q,無回授(虛線)和有回授(實線)的錯誤率. 圖 4.47 受測者 Q,無回授(虛線)和有回授(實線)的標準差. 觀察圖 4.42、4.44、4.46 無回授(虛線)和有回授(實線)的錯誤率,回授 的確可以大幅降低錯誤率的發生。然而,回授也有可能分散受測者的注意力,導 致分類器的效能降低,尤其是第一次接觸腦機介面實驗的操作時,受測者有時也 會因為缺乏利用思考來控制機器的經驗而不知所措,因此,多次的實驗訓練是必 要的。. 67.
(68) 4.4.6 權重向量的更新. 以下兩位受測者會接受 6 次的實驗(每隔一兩天做一次) ,第 1、4 次是無回 授的實驗(如圖 4.48 所示) ,第 2、3、5、6 次是有回授的實驗,第 2、3 次實驗 回授的權重向量取自於第 1 次的實驗結果,第 5、6 次實驗回授的權重向量取自 於第 4 次的實驗結果。觀察受測者在多次實驗訓練後,錯誤率下降的情形。. 圖 4.48 六次實驗的流程圖. 68.
(69) 圖 4.49 受測者 R,六次實驗的錯誤率. 實驗 1(無回授) 實驗 2(有回授) 實驗 3(有回授) 錯誤率分佈. 47.31%~35.12%. 44.43%~27.31%. 31.75%~21.75%. 最低錯誤率發生時間. 第4秒. 第7秒. 第 6.5 秒. 實驗 4(無回授) 實驗 5(有回授) 實驗 6(有回授) 錯誤率分佈. 51.12%~35.68%. 45.37%~24.81%. 47.31%~22.62%. 最低錯誤率發生時間. 第 5.5 秒. 第6秒. 第6秒. 表 4.8 受測者 R 六次實驗的錯誤率分佈(第 3 秒~第 8 秒間). 在前三次實驗中,分類器的準確度隨著實驗次數的增加而愈加改善,且在實 驗 3 達到最低的錯誤率 21.75%,然而受測者 R 已參加過多次腦機介面實驗的練 習,這可能是為什麼實驗 5 和實驗 6 的錯誤率並沒有比實驗 3 的錯誤率還要降 69.
(70) 低。不過普遍來看,有回授的實驗的錯誤率比無回授的還來的好,無回授的最低 錯誤率為 35.12%,而有回授的最低錯誤率可降到 21.75%。. 圖 4.50 受測者 S,六次實驗的的錯誤率. 實驗 1(無回授) 實驗 2(有回授) 實驗 3(有回授) 錯誤率分佈. 48.00%~35.93%. 42.56%~29. 12%. 38.18%~26.18%. 最低錯誤率發生時間. 第 4.5 秒. 第 6.5 秒. 第7秒. 實驗 4(無回授) 實驗 5(有回授) 實驗 6(有回授) 錯誤率分佈. 47.81%~33.43%. 41.12%~23.06%. 44.87%~26.87%. 最低錯誤率發生時間. 第5秒. 第6秒. 第6秒. 表 4.9 受測者 S 六次實驗的錯誤率分佈(第 3 秒~第 8 秒間). 70.
(71) 受測者 S 在前三次實驗中,錯誤率也有一直改善的趨勢,最低錯誤率從 35.93 %(實驗 1)降到 26.18%(實驗 3),且在實驗 4 更新權重向量後,最低的錯誤 率更下降到 23.06%(實驗 5) ,可見實驗的訓練和權重向量的更新有助於分類器 錯誤率的改善。另外,受測者 R 和受測者 S 的最低錯誤率或是整段的平均錯誤 率皆是有回授的比無回授的低,且最低的錯誤率皆發生在回授中段(受測者 1 的最低錯誤率發生在第 6.5 秒;受測者 2 的最低錯誤率發生在第 6 秒),回授的 前段和後段則相對較高。. 兩位受測者在經過六次實驗後,正確率達到了將近八成,這也證明了經過訓 練,想像左右手動作在某種程度上是可以分辨出來,要運用在實際的系統上是可 行的。當然,100%的可靠度要求是實際系統的最終目標,但隨著測試實驗次數 的再增加,分類的正確率並不一定會有更明顯的改善。可以預期的,有了測試實 驗的回授,會強化想像過程中相關的神經網路,存在於時間與空間上的腦電波形 式也會更加明確,然而,分類的效果並沒有加強。這可能歸因於人機學習困境 (man-machine learning dilemma, MMLD) ,在經過接連的實驗後,腦電波形態會產 生些微的變化,而這些腦電波形態變化的結果,降低了分類器的效能而無法全面 性的改善。. 人機學習困境意指兩個系統(人和機器)是十分相互依賴的,但卻必須獨立 的去適應。適應的開始是由訓練機器去識別受測者特定的腦電波形態,在這個時 期並沒有回授。而一經回授的提供,就會有人對機器適應性的回授結果:人會嘗 試重複成功而避免失敗。這會導致腦電波形態的變化,而這些腦電波正是機器分 析的來源,形態分佈的改變需要形態識別方法的適應,換言之,機器對人的適應。 再一次的,這會影響到系統的回授,影響到受測者的反應,導致腦電波形態更進 一步的變化。若腦電波並不受系統反應的影響,識別系統的一連串適應對於腦電 波的改變會是最佳化的,然而,由於腦電波形態對於系統反應的相互關係,連續 71.
(72) 不斷的適應會造成不穩定性且初始的適應性也會被破壞。經由實驗,顯示出電腦 系統和人的適應是雙向的。一個解決方法就是經過幾次的實驗後再更新系統,這 不但可降低不穩定性的危險,也讓腦電波變化的適應成為可能的。. 72.
(73) 第五章 結論與未來展望 5.1 結論 本論文在第一章曾經提到,希望自行發展一套腦機介面系統,並希望達到以 下五個目標: (1)使用者無需繁瑣的訓練; (2)適應性良好; (3)能做到即時分 類; (4)穩定度高; (5)系統構成簡單。以下分別敘述這五個論文主題的研究成 果:. 在第二章中,其內容介紹腦電波的處理方法:在前置處理方面,我們設計了 一個簡單的雜訊偵測器,濾除掉含有眨眼或肌肉收縮等雜訊的腦電波,提高訊號 雜訊比(SNR) ;在特徵運算方面,選擇 ERD 做為腦機介面輸入的特徵,主要是 因為高判別率和不需長久的訓練的優越性,我們將受測者想像左右手運動時空間 與時間的 ERD 形態量化,其分析的頻帶以 mu 頻帶和 beta 頻帶為主,但頻帶的 範圍因人而異,所以我們又採用 DSLVQ 的方法,找出受測者的最佳頻帶,增加 特徵的明確性;在特徵分類方面,運算快速的 LDA 分類器,使得腦機介面系統 能夠即時的回授,讓受測者馬上得知分類的結果,並利用 10×10 混合交叉確認的 方法,增加分類正確率的可靠度。. 在第三章中,我們將實驗分成兩個部分:第一個部分為訓練部分,讓系統去 識別受測者特定的腦波形態,訓練出每個受測者專屬的分類器;第二部分為回授 部分,利用前一部分所得到的分類器去分類受測者想像動作時的腦電波。受測者 可以根據回授的結果調整腦部的想像活動,進而改善分類的正確率、提升系統效 能。. 73.
(74) 在第四章中,詳細的敘述本研究的實驗結果,我們觀察到的結果如下:在想 像動作時節律活動的抑制,和實際動作執行下的情形類似。還有當選擇到一個良 好的受測者特定頻帶分析,可提升系統分類的正確率約 10%。另外,本研究也 曾就不同動作的想像來研究 ERD 現象的差異,包括:想像的動作、動作的速度、 動作的複雜度、動作想像的時間、和力量的大小。在各種想像動作當中,當受測 者一開始想像,皆有 ERD 的現象。其中,動作的速度和複雜度、想像的時間和 力量大小的不同均沒有發現明顯的差異。而想像動作方面,想像手指動、手腕動、 手臂動的差異也不大,因此,我們改用手和腳的想像,經實驗證明,想像手和腳 的 ERD 差異比想像左右手來的好(正確率改善約 5%),或許這需要較長的訓練 時間,但只要受測者熟悉了實驗流程,正確率將會比想像左右手的還要高。另外, 我們也可以增加腦電波的形態(左右手加上腳),使輸出訊號的控制可以從一維 (左、右)增加到二維(左、右、下)。雖然本研究仍處於初步階段,受測者的 數目不足以達到統計意義,然而,實驗結果顯示,我們藉由回授和分類器權重向 量的更新的確可以讓受測者在短時間內有效的提升對腦機介面系統控制的正確 率(兩位受測者正確率均改善 10%以上) ,且分類器的適應性也讓每位受測者都 能夠輕易的操作本腦機介面系統。. 5.2 未來展望 腦是人類活動的控制中心,藉由儀器我們可以觀察到腦部細胞的活動情形, 只要能掌握到腦電波的特徵,則未來的發展空間與方向還很多,例如:特徵萃取 方面的改良、判讀類別的增加、判讀準確率的提升、臨床的測試、或與其他生理 資訊的結合等等。. 74.
(75) 另外,回授所引起的腦電波預期反應也會影響到每次實驗的差異,錯誤的回 授結果會造成困惑,正確的回授結果會強化特定腦電波的形態,兩種結果都有可 能引起雜訊以及使分類效能惡化,除此之外,回授所產生的視覺刺激也有可能導 致腦電波的改變。因此,這些腦電波的反應和回授的互動以及對分類器效能的影 響,也都是值得更深入的分析與探討。. 腦科學是 21 世紀生命科學研究的前沿熱點,本研究只是其中一個很小的領 域,尚有很多問題需要高度交叉的跨學科研究努力,本論文提出的一些方法,也 還需要加強與臨床醫學協作研究,在實踐中不斷完善提高,以使之更快地進入臨 床應用。. 75.
數據

+7



Outline
相關文件
由聲波的波形決 定,不同的人及 樂器產生的波形 都不同。.
這種電磁波存在大自然中,而人眼 只能看到其中的一部份,也只有那 裡的光線讓人眼視覺和大腦的交互
(wave vector)」,記做k,其大小就是波的相位 常數k,其方向就是波的傳播方向。它的三個座標
(isotropy)介質,P 與E 方向相同且成正比, M
z 方波是一週期波,其正及負峰值 存在的時間長度一樣,而兩者是 交互出現,如圖5-14所示。對一
在 1855 年英國科學家 Lord Rayleigh 於地震研 究領域就發現了表面聲波的存在,此後則將此現象 運用於地震研究上,此表面波亦被稱為 Rayleigh wave ;直到 1965
A diamagnetic material placed in an external magnetic field B ext develops a magnetic dipole moment directed opposite B ext.. If the field is nonuniform, the diamagnetic material
10 Magnetism of Matter 磁 性 Electromagnetic Waves 電磁 波. How can a clay-walled kiln reveal
