國 立 交 通 大 學
機械工程學系碩士班
碩 士 論 文
一種以圓管脊緣撓性波周向驅動之超音波馬達
An Ultrasonic Motor Driven by Circumferential
Ridge Waves
研 究 生:李政良
指導教授:尹慶中 博士
一種以圓管脊緣撓性波周向驅動之超音波馬達
An Ultrasonic Motor Driven by Circumferential
Ridge Waves
研 究 生:李政良 Student:Chen-Liang Lee
指導教授:尹慶中 博士 Advisor:Dr. Ching-Chung Yin
國 立 交 通 大 學 機械工程學系碩士班
碩 士 論 文
A Thesis
Submitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master of Science
in
Mechanical Engineering July 2007
Hsinchu, Taiwan, Republic of China
一種以圓管脊緣撓性波周向驅動之超音波馬達
研究生:李政良
指導教授:尹慶中 博士
國立交通大學機械工程學系碩士班
摘 要
本文發展出一個以壓電圓管脊緣撓性波驅動的新型轉動式 超音波馬 達,採用高階的周向模態,增加馬達定子與轉子接觸點,改善傳統圓柱形 超音波馬達採用梁共振模態,造成轉子晃動、扭矩小的缺點。馬達定子由 一徑向極化之壓電陶瓷圓管與不鏽鋼基座黏結而成,以網版印刷在壓電圓 管外側佈置兩組電極,兩組電極的間距為(n+1/4),以相位差 90 度之兩組 等強度弦波激發兩組周向匝數為整數的駐波,兩者建設性干涉成一行進 波。藉著定子與轉子間的摩擦力,驅動轉子順時針或反時針方向轉動。本 研究應用雙維有限元素法與 ANSYS 套裝軟體,數值計算馬達定子脊緣撓 性波的頻散曲線及共振模態,並模擬雙相致動之馬達定子的行進波響應。 由馬達定子基座高度的調整,有效達成良好的模態隔離設計,經都卜勒干 涉儀及模態感測器量測阻抗實驗,驗證其確實可行。 超音波馬達性能測試結果顯示,壓電圓管軸對稱佈置電極者較兩側佈 置電極者的性能優異。依據前者製作高階脊緣撓性波(1,3)與(1,4)模態的超 音波馬達原型,最大扭矩可達 6.9 與 22.6 mN-m,最大轉速為 200 與 334 rpm。 關鍵詞:行波型超音波馬達、圓管脊緣波、雙相驅動、模態感測器An Ultrasonic Motor Driven by Circumferential
Ridge Waves
Student: Chen-Liang Lee Advisor: Dr. Ching-Chung Yin
Department of Mechanical Engineering National Chiao Tung University
ABSTRACT
This thesis develops a novel rotary ultrasonic motor (USM) driven by circumferential ridge waves around a piezoelectric tube which is polarized in radial direction. The proposed motor utilizes higher order circumferential modes to increase the number of contact points between motor stator and rotor. The wobble motion and poor torque output that frequently happen at those USM’s driven by the so-called beam mode are prevented and improved. The traveling ridge wave is generated by constructive interference of two equal-intensity standing waves of integer number circumferential modes induced by two sets of transducers. Both are located on the wall of the piezoelectric tube with an interval (n+1/4)apart and excited by two sinusoidal signals in 90o phase difference. A bi-dimensional finite element method and the commercial finite element code ANSYS are used to determine the dispersion curves of circumferential ridge waves. Response of traveling wave around the stator is simulated by using harmonic analysis of ANSYS. The change of the height of stator base has significant influence on the modal separation. Very good modal separation was achieved and verified by using laser Doppler vibrometer (LDV) and impedance measurement by modal sensors on the outer border of stator with network analyzer. Performance test results show that the prototype USM’s with axisymmetrically distributed electrodes have better performance than those with electrodes located on opposite sides of the piezoelectric tube. The motors based on resonant modes (1, 3) and (1, 4) achieve the maximum torque up to 6.9 and 22.6 mN-m and the maximum revolution speed at 200 and 334 rpm.
Keywords: traveling wave ultrasonic motor, circumferential ridge waves, dual phase drive,
誌 謝
在此論文定稿之際,感謝指導教授 尹慶中博士兩年來的悉心指 導,使學生論文得以順利完成,在此致上由衷的謝意。同時感謝馬劍 清教授、蕭國模教授及楊哲化教授撥冗擔任學生口試委員,給予學生 指教與指正。此外,也謝謝學長游泰和、王多聞、許世明、李雨青給 予政良生活與學業上的幫助,加上同學施文斌、蘇裕為、楊炘岳兩年 來的互相扶持與幫助,使研究的過程更加順利。以及學弟蔡汶志、嚴 承侯、潘權文謝謝你們過去一年的陪伴,讓政良的研究所生涯增色許 多,也祝福你們論文順利。 政良最感謝的是偉大的雙親,李群霖先生與劉梅金女士,你們是 政良精神上最大的支柱,求學之路有你們的支持、呵護與寬容,讓政 良在無後顧之憂下完成碩士學位,也感謝大哥振樟與二哥政佑你們的 支持與鼓勵。還有許多不及備載曾幫助政良的朋友,衷心感謝外,政 良僅以此論文獻給我摯愛的雙親、家人、及好友。目錄
中文摘要 i 英文摘要 ii 誌謝 iii 目錄 iv 表目錄 vi 圖目錄 vii 第一章 緒論 1 1.1 研究背景 1 1.2 文獻回顧 2 1.2.1 楔形體波導的研究 2 1.2.2 超音波馬達的研究 3 1.3 研究內容 4 第二章 超音波馬達設計分析 5 2.1 超 音 波 馬 達 驅 動 原 理 5 2.1.1 超音波馬達的介紹 5 2.1.2 雙相驅動的原理 6 2.2 雙維有限元素分析 7 2.2.1 壓電材料的材料特性 7 2.2.2 漢彌頓原理 9 2.2.3 頻散方程式 10 2.3 ANSYS 軟體的數值模擬 14 2.3.1 共振模態與頻散曲線 14 2.3.2 模態隔離 15 2.3.3 雙相致動的合成響應 16第三章 實驗量測與結果討論 18 3.1 超音波馬達的製作 18 3.1.1 電極塗佈 18 3.1.2 超音波馬達製作的流程 18 3.2 共振頻率量測系統 19 3.2.1 雷射都卜勒干涉儀 19 3.2.2 頻譜響應 20 3.2.3 網路分析儀 21 3.2.4 阻抗響應 22 3.3 超音波馬達性能量測 與分析 22 3.3.1 模態感測器訊號的分析 22 3.3.2 性能試驗 23 3.3.3 最大扭矩量測試驗 23 3.3.4 馬達性能分析 24 第四章 結論與展望 26 4.1 結論 26 4.1.1 模擬結果分析 26 4.1.2 實驗結果分析 26 4.2 未來展望 27 參考文獻 28 附表 30 附圖 33
表目錄
表1 壓電陶瓷PZT-4的材料係數 30
表2 不鏽鋼(SUS)與黃銅的材料係數 30
表3 圓管狀馬達定子撓性波(1,4)模態與鄰近模態共振頻率 31
圖目錄
圖 2.1 駐波式超音波馬達的工作原理示意圖[16] 33 圖 2.2 行波式超音波馬達的工作原理示意圖[16] 34 圖 2.3 (a)本文的超音波馬達主體結構:上半部為壓電圓管,下半部 為不鏽鋼基座;(b)本文的超音波馬達的工作原理示意圖。 34 圖 2.4 單方向波傳之行進波激發電極佈置示意圖 35 圖 2.5 周向匝數 n = 4 之(a)軸對稱分佈電極、(b)兩側配置電極 35 圖 2.6 超音波馬達定子的幾何尺寸 36 圖 2.7 超音波馬達的有限元素模型網格 36 圖 2.8 超音波馬達定子的周向模態 n = (a) 2、(b) 3、(c) 4、(d) 5 37 圖 2.9 超音波馬達定子的軸向模態 m = (a) 1、(b) 2、(c) 3、(d) 4, 對 應 (d)圓 管 截 面 變 形 38 圖 2.10 超音波馬達定子的(a)縱向模態及(b)扭轉模態 39 圖 2.11 基座高度 H = 0 及 12.5 mm 的馬達定子脊緣撓性波頻散曲線 39 圖 2.12 軸對稱分佈電極(實線)與兩側配置電極(虛線)驅動周向模態 (1, 4)之行進波位移振幅與相位分佈(破折線) 40 圖 2.13 軸對稱分佈電極驅動周向模態(1,2)、(1,3)、(1,4)之行進波 位移振幅分佈 40圖 3.1 電極佈置設計圖 41 圖 3.2 網版成品 41 圖 3.3 PZT-4 壓電圓管(自左依序為清洗電極前、後及佈好設計之電極) 42 圖 3.4 馬達定子基座的設計圖 42 圖 3.5 壓電圓管、基座與製作完成的馬達定子實體 43 圖 3.6 馬達轉子的設計圖 43 圖 3.7 都卜勒干涉儀量測馬達定子共振頻率示意圖 44 圖 3.8 網路分析儀量測馬達定子的阻抗示意圖 44 圖 3.9 n = 2 之軸對稱分佈電極驅動馬達定子的頻率響應 45 圖 3.10 n = 2 之軸對稱分佈電極驅動馬達定子的相位頻譜 45 圖 3.11 n = 3 之軸對稱分佈電極驅動馬達定子的頻率響應 46 圖 3.12 n = 3 之軸對稱分佈電極驅動馬達定子的相位頻譜 46 圖 3.13 n = 4 之軸對稱分佈電極驅動馬達定子的頻率響應 47 圖 3.14 n = 4 之軸對稱分佈電極驅動馬達定子的相位頻譜 47 圖 3.15 n = 4 之兩側配置電極驅動馬達定子的頻率響應 48 圖 3.16 n = 4 之兩側配置電極驅動馬達定子的頻率響應及相位頻譜 48 圖 3.17 n = 2 之軸對稱分佈電極驅動馬達定子的阻抗與相位頻譜 49 圖 3.18 n = 3 之軸對稱分佈電極驅動馬達定子的阻抗與相位頻譜 49 圖 3.19 n = 4 之軸對稱分佈電極驅動馬達定子的阻抗與相位頻譜 50
圖 3.20 n = 2 之軸對稱分佈電極驅動馬達定子的高頻阻抗與相位頻譜 50 圖 3.21 n = 3 之軸對稱分佈電極驅動馬達定子的高頻阻抗與相位頻譜 51 圖 3.22 n = 4 之軸對稱分佈電極驅動馬達定子的高頻阻抗與相位頻譜 51 圖 3.23 n = 4 之兩側配置電極驅動馬達定子的阻抗與相位頻譜 52 圖 3.24 n = 4 之兩側配置電極驅動馬達定子的高頻阻抗與相位頻譜 52 圖 3.25 模態感測器量測 n = 3 之軸對稱分佈電極驅動馬達定子 的負載與無負載之訊號 53 圖 3.26 模態感測器量測 n = 4 之軸對稱分佈電極驅動馬達定子 的負載與無負載之訊號 53 圖 3.27 模態感測器量測 n = 4 之兩側配置電極驅動馬達定子 的負載、無負載及不同頻率驅動之訊號 54 圖 3.28 超音波馬達扭拒與轉速性能測試示意圖 54 圖 3.29 超音波馬達最大扭拒量測示意圖 55 圖 3.30 線性彈簧壓縮量與負荷曲線 55 圖 3.31 超音波馬達的轉速與預負載曲線 56 圖 3.32 超音波馬達的扭矩與預負載曲線 56 圖 3.33 超音波馬達的扭矩與轉速曲線 57 圖 3.34 超音波馬達的轉速與驅動電壓曲線 57
第一章 緒
論
1.1 研究背景
超音波馬達(ultrasonic motor)又稱為壓電馬達(piezoelectric motor),利 用超音波頻率範圍之機械振動為驅動源,藉馬達定子與轉子間的摩擦力轉 動或移動轉子。與一般電磁馬達相比,具有體積小、質量輕、高扭矩密度、 低轉速、結構簡單、沒有電磁干擾等優點。因此在一些需要安靜的場所, 如醫院、辦公室,或容易受到電磁干擾的地方,如磁浮列車、核磁共振設 備、精密定位設備、自動對焦相機,甚至航太工業…等等,使用超音波馬 達有越來越普遍的趨勢。超音波馬達利用摩擦驅動的方式運轉,有摩擦勢 必產生磨耗,長久下來,摩擦介面越來越光滑,產生的扭矩跟著減少,馬 達內部的溫度與摩擦介面隨運作時間、溫度而改變。故超音波馬達的定速 控制較傳統電磁馬達複雜,在某些需固定轉速的場合,反而不如電磁馬達 適用。 超音波馬達發展至今已有三十多年的歷史,第一個可實際應用的超音 波馬達誕生在1970年代初期。西元1972年,分別由H. V. Barth於IBM Watson Laboratory,以及Galutva等學者在前蘇聯共和國發展出來。之後,日本學者 在超音波馬達的發展上付出最多的心力,漸漸超越其他國家的成果。在1980 年代末期,超音波馬達出現具革命性的發展,Toshiiku與Sashida等日本學者 提出行波式超音波馬達(traveling-wave ultrasonic motor),此設計概念為日後 的超音波馬達設計,提供了更好的選擇。
本研究的靈感源於 Lagasse[1]的理論,他的研究發現線型或圓管型聲波 導(acoustic wave guides)的撓性振動局限於脊緣的特性。應用在圓管結構 上,可以使圓管脊緣的頂端產生反對稱的周向波傳。本研究應用此現象發 展以 PZT 壓電圓管為定子結構,雙相驅動轉子以順時針或逆時針轉動之超
音波馬達,並製作出原型機,進行性能測試。
1.2 文獻回顧
1.2.1 楔形聲波導的研究 Lagasse [1]於 1972 年以數值計算方式證實頂角在一定角度範圍內之楔 形體具有聲波導的效應,反對稱之撓性波沿著楔形體頂端波傳,波的能量 大部分局限在距離楔形體尖端約一個波長範圍內,當在楔形體頂角無截平 (truncation)的情形下,該導波不具有頻散現象。 Lagasse [2]於 1973 年應用有限元素分析方法,以二階內插函數之三角 元素分割不同截面形狀之聲波導,探討無限長線型波導之波傳行為,觀察 不同幾何截面之楔形體導波頻散現象。該研究結合變分原理(variational principle)及有限元素分析,對於聲波導的波傳研究,提供了一個有力的分 析方法。Krylov [3]於 1994 年,以幾何聲學(geometrical acoustics )理論,推導波 於水中的楔形體之導波波傳速度,分析結果發現,導波受到水的耦合效應, 波的相速度比在真空中慢 ,波速的減少與楔形體頂角角度呈非線性的關 係。該研究中還預言利用低速之楔形導波,可發展出類似水下魟魚運動模 式的推進器。Krylov 與 Pritchard[4]-[5]終於在 2007 年發展出類似雙體船的 楔形體推進器模型。 Hladky-Hennion [6]於 1996 年,以 雙维 (bi-dimensional)有限元素法的數 值分析方法,分析線型和圓柱型楔形體導波之波傳行為,並且探討曲率半 徑、頂角角度及頂角截平等參數,對於楔形體導波相速度的影響。 陳 俊 男 [7] 於 2002 年 碩 士 論 文 研 究 期 間 , 參 考 Lagasse[2] 與 Hladky-Hennion[6]的研究,應用漢彌頓原理(Hamillton’s principle)與有限元 素法,發展雙維有限元素法數值程式分析線型及圓柱型聲波導的頻散特性
及共振模態,計算各模態的共振頻率及對應之導波相速度頻散曲線,並探 討元素的收斂性。 1.2.2 超音波馬達的研究 超音波馬達的構想首次於 1960 年由蘇聯科學家提出,以壓電材料進行 驅動,發明初期仍然有許多缺點,故不實用。此後,由日本學者針對其缺 點改善,使得超音波馬達得以商品化。Sashida[8]於 1982 年,在日本電氣 學 會 雜 誌 發 表 實 用 的 環 形 (ring-type) 超 音 波 馬 達 新 模 型 ,利 用 行 進 波 (traveling waves)傳遞方式驅動。超音波馬達的工作頻率通常落在對應共振 模態的共振頻率附近。 圓柱型結構的振動或波動可以區分為縱波(longitudinal waves)、扭轉波 (torsional waves)及撓性波(flexural waves)三種,其中前兩者的運動與周向角 度無關。Aoyagi et al[10]於 1992 年,結合縱向加上彎曲雙模態產生模態耦 合(mode coupling)振動,發展以單相驅動方式轉動轉子的超音波馬達。Koc et al[11]於 2002 年,提出在中空圓柱外表面互為垂直的位置緊貼兩片壓電 梁,驅動中空圓柱產生彎曲梁模態(beam mode),轉動圓錐形的轉子,最快 轉速可達 60 rad/s,最大扭矩 1.8 mN-m,輸出功率 60mW,效率達 25%, 適合微型化。國內先寧電子公司即生產此種超音波馬達。 Tominaga et al[12]於 2005 年,提出一種 T 形長條軌道的線型超音波馬 達,以藍傑文振盪子(Langevin transducer)做為激振器,跟據 Lagasse[2]的研 究結論,面外的撓性波會被局限在脊緣的邊緣,由於脊緣撓性波的橢圓形 運動,T 形軌道上方的滑塊會朝著波傳方向的相反方向移動,滑塊移動速 度最快可達 46.8 mm/s。
Pappalardo et al[13]於2006年,設計一組環狀的馬達定子內徑與圓錐形 的轉子接觸,利用兩個相差90°藍傑文振盪子(Langevin transducer),在環狀
定子上激發出周向模態為5的行進波(traveling wave)驅動之超音波馬達。以 有限元素法先分析定子的共振模態,再以實驗量測性能曲線,馬達的最大 扭矩為0.8 N-m、最快角速度為300 rpm,並討論如何調整現況參數,進行改 良。
1.3 研究內容
本文共分成四章,第一章為文獻回顧及研究背景的介紹。第二章先對 簡單介紹超音波馬達及驅動原理,討論利用電極的排列關係,雙相驅動合 成順時針或逆時針方向傳遞的行進波,並以雙維有限元素法和套裝軟體 ANSYS 以三維有限元素法模擬馬達定子脊緣撓性波的共振頻率及頻散曲 線,方法分析馬達定子的高度對共振頻率的改變,設計模態隔離最佳的定 子高度,最後以時諧分析模擬定子結構雙相致動的行進波響應。 第三章介紹以兩套不同量測系統量測馬達定子的共振頻率,比較軸對 稱分佈與兩側配置電極的馬達定子的量測頻譜圖與阻抗圖之差異性。由模 態感測器擷取馬達驅動時的訊號,分析馬達定子受到轉子負載的訊號的變 化。最後對於本研究所設計的超音波馬達進行性能分析,比較周向模態數 n=3 與 n=4 之軸對稱佈置電極及 n=4 兩側配置電極驅動的馬達最大扭矩與 轉速。第四章為本研究的結論與展望。第二章 超音波馬達設計分析
本章介紹超音波馬達之工作原理,超音波馬達依驅動方式分為行波型 與駐波型,設計壓電材料的表面電極,激發適當的共振模態產生行進波, 驅動轉子或滑台。此外,本研究以撓性波驅動超音波馬達,分別以雙維有 限元素法與套裝軟體ANSYS,分析馬達定子行進波的頻散曲線及共振頻 率,作為設計的依據,並以時諧分析探討不同配置的電極對於馬達定子的 位移響應。2.1 超音波馬達的驅動原理
2.1.1 超音波馬達的介紹 人耳能感知的聲音頻率約為20Hz ~ 20kHz,此範圍為可聽頻率(audible frequency range),超音波則為20kHz以上的聲波 。超音波馬達(ultrasonic motor 簡稱USM)是利用超音波頻率範圍的機械振動驅動轉子或滑台的致 動器,與電磁馬達工作原理不同,超音波馬達直接將電能轉換成機械能輸 出,不經過磁場轉換。其致動原理是先施加AC電流,使壓電致動器產生機 械振動,再藉馬達定子與預壓其上的轉子之間的摩擦力,將振動轉換成轉 子或滑台旋轉或直線運動。由超音波馬達驅動方式可分成1. 駐波型:亦稱為振動轉換型(vibration conversion type)。以圓柱型馬達定 子為例,當施加交流電壓時,會同時進行縱向與切線方向的振動。其工 作原理如圖2.1所示,可分為以下四個步驟: (1)縱向振動為零,切線方向振動為負向最大值,此時定子存在一扭力, 但是未與轉子接觸。 (2)縱向振動為最大值,使定子增長接觸到轉子,並將切線方向振動傳至 轉子,使其旋轉。
(3)縱向振動為零,使轉子與定子分開,此時切線方向的振動為最大值, 定子被壓縮。 (4)縱向振動為負向最大值,切線方向振動為零,並開始反扭轉使其回到 原點。 如此週而復始,便能帶動馬達作單一方向旋轉運動。駐波型超音波馬達 的成本低(只需一個振動源),但方向不易控制。 2. 行波型:行波的產生需在壓電體上設置兩組電極,如圖2.2。這兩組電極 產生的電場方向與壓電體的極化方向分別相同及相反,兩組電極的訊號 頻率與振幅相等,但是訊號間的相位差90 。行進波造成彈性體表面的 粒子產生橢圓形運動軌跡,藉摩擦作用驅動轉子旋轉。 本研究發展的超音波馬達工作原理如圖2.3所示,馬達定子為壓電陶瓷 圓管與不鏽鋼基座所構成,轉子為黃銅製作的圓錐型結構,轉子圓錐面與 壓電圓管內側端緣接觸。驅動時,壓電陶瓷外表面電極受外加電壓影響, 造成定子產生機械共振,兩組驅動器產生的駐波因相位差及空間位置的先 後,合成為沿著定子周向波傳的行進波,定子表面的粒子作橢圓形軌跡運 動。馬達軸向的預負載會使定子與轉子接觸,藉著摩擦力,推動轉子轉動。 2.1.2 雙相驅動的原理 超音波馬達定子內激發行進波的原理,如圖2.4所示。在壓電陶瓷表面 有A、B兩組致動器,假設施加相同電壓時,這兩組致動器會產生振幅相同, 分別往左右傳遞的撓曲波,若周向模態數為整數,會形成駐波,以位移形 式分別表示為
u
A與u
B, ( ) ( ) i kx t i kx t Au
e
e
(2.1) [ ( ) ( )] [ ( ) ( )] i k x t i k x t Bu
e
e
(2.2) 其中 k 代表波數,代表兩組致動器之間的距離, 代表A、B兩組致動器激振的時間差,若這兩組彈性波擾動相互干涉時,位移可表示為
( ) ( ) ( ) ( )1
1
i kx t i k i kx t i k A Bu
u
e
e
e
e
(2.3) 假設 ( )1
i ke
,e
i k( )
1
(2.4) 將(2.4)式代入(2.3)式,則這兩組波合成為沿X向作波傳的行進波,表示為 ( )2
i kx t A Bu
u
e
(2.5) 由(2.4)的充分必要條件,則2
k
n
,k
(2
n
1)
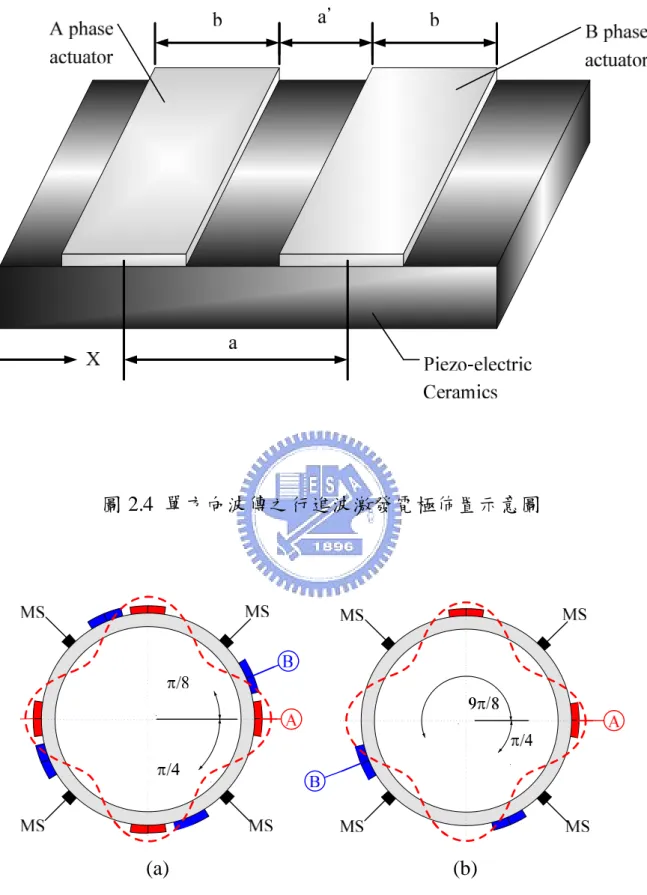
(2.6) 經由整理,可獲得A、B兩組致動器間的距離與驅動時間 的關係式, 4 1 n , 4 T (2.7) 其中,與T分別代表波長與週期,n為0或大於0的整數。本研究將上述致 動器佈置方式,佈置於壓電圓管的外側。若以在圓管脊緣上產生四個波長 的行進波為例,驅動器的佈置方式如圖2.5所示,圖2.5(a)所示情況為 n = 0, A與B組驅動器間的距離為/4,同相位的各驅動器的距離為,各組驅動 器的數目與所要產生的波長數相同,本研究稱此種驅動器佈置方式為軸對 稱分佈電極。此外,圖示之MS代表模態感測器( modal sensor ),數目與波 長數相等,位置安排在以A相驅動器激振時,定子結構位移最大處。圖2.5(b) 所示情況為 n = 1時,A與B相驅動器之間的距離為5/4,同相位的各驅動 器的距離仍為,但各組驅動器的數目為所要產生波長數的一半,這種驅 動器佈置方式只適合在圓管上產生的行進波波長數為偶數的情形,為了與 圖2.5(a)區別,簡稱此為兩側配置電極。2.2 雙維有限元素分析
2.2.1 壓電材料的特性方程式本研究採用的壓電陶瓷材料為 PZT-4,屬於 6mm 晶系,為橫向等向性 材料(transversely isotropic material)。壓電材料具有正逆壓電效應,若對於 壓電材料施加正向壓力,壓電體為了抵抗電偶極矩壓縮變短的趨勢,會產 生電荷以保持原狀態,稱為機械能轉換成電能的正壓電效應。當壓電材料 受到電場作用時,電偶極矩被拉長,壓電體會依電場方向而產生形變,稱 為電能轉換成機械能之逆壓電效應。壓電結構受電場或機械力負載下,本 構方程式表示如下: ij ijkl kl kil k S i ikl kl ij k T c S e E D e S ε E (2.8)
其中,T 、ij Skl為應力張量及應變張量,cijkl是彈性勁度張量(elastic stiffness
tensor),eikl是壓電常數(piezoelectric constants)張量,Di是電位移,Ek是電
場強度, S ij ε 是固定應變(constant strain)下的介電(dielectric)常數張量。將(2.8) 式的下標依 Voigt 表示法簡化,可改寫如下: p pq q kp k S i iq q ik k T c S e E D e S ε E (2.9) 若壓電圓管的極化方向為圓管的徑向,對應的特性矩陣分別表示如下: 彈性勁度矩陣為 44 44 66 11 12 13 12 11 13 13 13 33 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 C C C C C C C C C C C C c 壓電常數矩陣為 0 0 0 0 0 0 0 0 0 0 0 0 0 15 15 31 31 33 e e e e e e
固定應變之介電常數矩陣為 S S S S 11 11 33 0 0 0 0 0 0 ε 應力張量T、應變張量S、位移向量u、電位移D、電場強度E與電位能Φ 則分別定義如下:
T rz r z zz rr T
T rz r z zz rr 2 2 2 S
T z r u u u u
T z r D D D D
T z r E E E E
Φ Φ 2.2.2 漢彌頓原理 考慮圓管狀聲波導的內外側表面曳力(surface traction)為零,當彈性體 達到動態平衡時,由漢彌頓原理(Hamilton’s principle)得知其總勢能的一次 變分為
2 1 0 t t dt H T (2.10) 且在時間t1與t2之所有場變數(field variables)的一次變分為零,其中T與H 為彈性體的總動能與焓(enthalpy),材料內部的動能為 1 2 H z r T rdrdzd
u ρ u (2.11) 材料內部因機電效應所產生的焓定義為應變能與電勢能的差, 1 ( ) 2 H H H H H S z r H rdrdzd
S cSS e EE eSE ε E (2.12)其中,c 為材料剛性矩陣,ρ 為一33的對角矩陣,代表彈性聲波導的密度, 上標點(overdot)代表對時間的偏微分,上標 H 表示 Hermitian 矩陣,代表共 軛轉置(conjugate transpose),若材料剛性矩陣c 與密度矩陣ρ 為實數對稱矩 陣,則應變能與動能保證為正定(positive definite)。圓管狀聲波導系統的拉 格朗日函數(Lagrangian function)LT H 表示如下:
rdrdzd L z r S H H H H H H ) ( 2 1 E ε E eS E E e S cS S u ρ u (2.13) 應用漢彌頓原理,將拉格朗日函數對時間積分一次的變分設為零,可推得 圓柱型聲波導之運動方程式,
2 1 0 t t dt L (2.14) 2.3 頻散方程式 利用有限元素法將圓柱型聲波導的截面離散成許多個節點連續的微小 元素,元素內任意點的位移、電位分別表示成內插函數與節點位移的乘積、 內 插 函 數 與 節 點 電 位 的 乘 積, 本 文 採用 的 是二 維 的 四 節 點 等 參 元 素 (isoparametric element) Q4 元素。 考慮圓管狀聲波導之撓性波沿著圓周周向波傳,波動在與波傳方向垂直 之截面維持共振型態。參考圖 2.1 之座標系統,其位移向量與電位能分別 假設為 jn z r z r e t z r ju t z r u t z r u u u u ) , , ( ) , , ( )) , , ( u (2.15a) jn e t z r Φ Φ ( , , ) Φ (2.15b) 其中,n , k 為波數(wavenumber), j 為複數kR 1,波傳因子ejn中的 n代表沿著圓周方面傳遞的脊緣導波波長數目,R為圓管中心至管壁中心線 的距離。(2.15)表示成矩陣形式,則: d N u u (2.16a) φ N Φ (2.16b) 其中,
T z r u u u u (2.16c)
Φ Φ (2.16d)
N1 N2 N3 N4
Nu (2.16e) jn i i i i e jN N N 0 0 0 0 0 0 (2.16f) Niejn N , (1 )(1 ) 4 1 i i i N (2.16g)
T 4 3 2 1 d d d d d ,di
uri uzi ui
(2.16h)
1 2 3 4
T φ (2.16i) 此處d 為節點的位移向量,φ 為節點的電位向量。將應變S 與電位能Φ 表示 成矩陣的形式,則 d B S u (2.17a) φ B E φ (2.17b) 其中,
u1 u2 u3 u4
u B B B B B (2.17c) jn i i i i i i i i i i i i u e r N z N r N r N j r N jn z N j r N jn r N n r N z N r N 0 / / ) / / ( 0 ) / ( ) / ( ) / ( 0 ) / ( 0 / 0 / 0 0 0 / B (2.17d)
φ1 φ2 φ3 φ4
φ B B B B B (2.17e) ) / ( φ jn i i i i e r N jn z / N r / N B (2.17f) 將(2.16)式與(2.17)式元素內任意點的位移u 、應變S、電位能Φ 、電場 E,代入(2.11)式、(2.12)式與(2.13)式中,獲得全部元素的總動能T、焓H 與 拉格朗日函數L值,分別表示為 1 2 H T
d md (2.18a) φ φ φφ 1 ( ) 2 H H H H uu u u H
d k d d k φ φ k d φ k φ (2.18b)
( ) 2 1 φφ φ φφ φ k d φ k φ k d d k d d m dH H uu H u H u H H T L (2.18c) 將(2.18)式代入(2.14)式,整理得 0 ) ( 2 1 2 1 φφ φ φ
dt t t H u H u H uu H H φ k φ d k φ φ k d d k d d m d (2.19) 對(2.19)式進行變分運算,透過部分積分(integration by part),並考慮在時間 1 t 與t2時,d d 0 H 的限制條件,將(2.19)式整理,可得 dt dt t t u H t t u uu H ( ) ( ) 2 1 2 1 2 1 φφ φ φ
d md k d k φ φ k d k φ 0 ) ( ) ( 2 1 2 1 φ φ φ φ
t t H u H t t u H uu H Hm d k φ k dt d d k φ k dt φ d (2.20) 因此,圓管狀聲波導之運動方程式可表示如下:
mdkuudkuφφ 0 (2.21)
kφud kφφφ 0 (2.22)
dTm dTkuu φTkφu 0 (2.23)
dTkuφ φTkφφ 0 (2.24) 其中,各元素的質量矩陣、勁度矩陣m 、kuu、kuφ、kφu與kφφ為對稱的實 數矩陣,故(2.21)與(2.23)兩式恆等,(2.22)與(2.24)兩式也恆等。整理(2.21) 與(2.22)式,可獲得全部元素的運動方程式,
0 φ d k k k k φ d m φ φ φ φ 0 0 0 u u uu (2.25) 若將上述離散元素質量矩陣、勁度矩陣組合成全域矩陣(global matrix),可 獲得整個系統的運動方程式,表示如下: 0 0 0 0 0 φφ φ φ Φ D K K K K Φ D M u u uu (2.26) 若節點位移具有時諧因子 i t e,將DDeit、D2Deit、Φ Φ eit 與 i t e 2Φ Φ ,分別代入(2.25)式,可建立波數 k 與角頻率相依之頻散 方程式, 0 0 0 0 2 φ φ φ φ Φ D M K K K K u u uu (2.27) (2.27)式為一特徵值問題,方程組非零解(non-trivial solution)成立的充分條 件為 0 0 0 0 det 2 φφ φ φ M K K K K u u uu (2.28)2.3 ANSYS軟體的數值模擬
本文依據上述的雙維有限元素法,建立一套數值程式,可以有效率、 精確的計算圓管脊緣撓性波的頻散曲線及共振模態,不論是行進波(n 為正 實數)或是駐波(n 為整數)都適用。本文並未進一步發展時諧響應(harmonicresponse)分析程式,相關的數值計算採用 ANSYS 套裝軟體,模擬馬達定子 結構受到交流電壓激振的時諧響應。ANSYS 有限元素套裝軟體的結構動態 分析程序分為前處理、分析、後處理三個部份。 在前處理部份,先建立馬達定子的幾何模型,幾何尺寸如圖 2.6 所示, 上半部為 PZT-4 壓電圓管,材料參數詳列於表 1 (參考吳朗[15]),下半部為 基座,材料為不鏽鋼(SUS)金屬(材料參數列於表 2),馬達定子的基座高度 H 是由模態隔離(modal separation)分析所決定。元素型態(element type)採用 SOLID5 元素,此為 8 節點之三維塊狀耦合元素(3-D coupled-field solid),每 個節點有 x、y、z 三個方向的位移及電位差,以適當元素數量將模型網格 化(mesh),如圖 2.7 所示,元素數目為 67200,節點數為 83040。
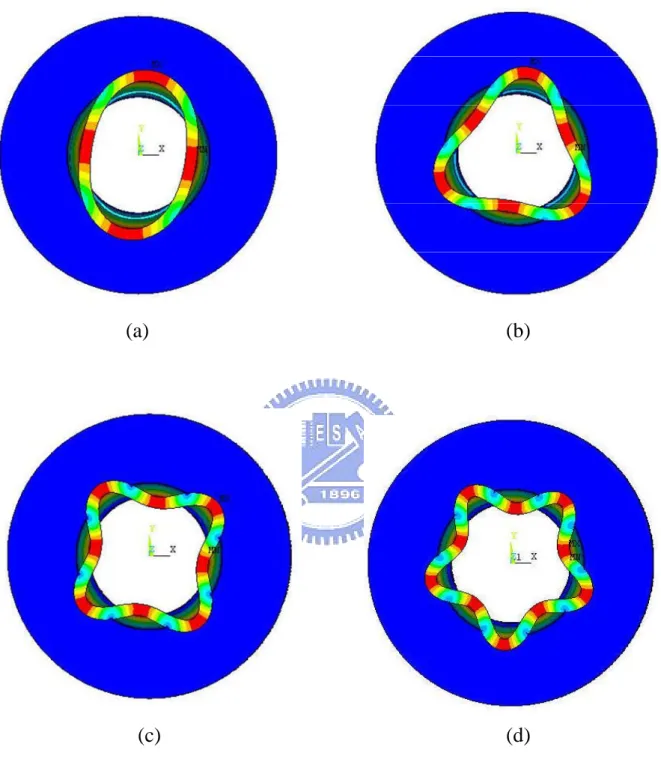
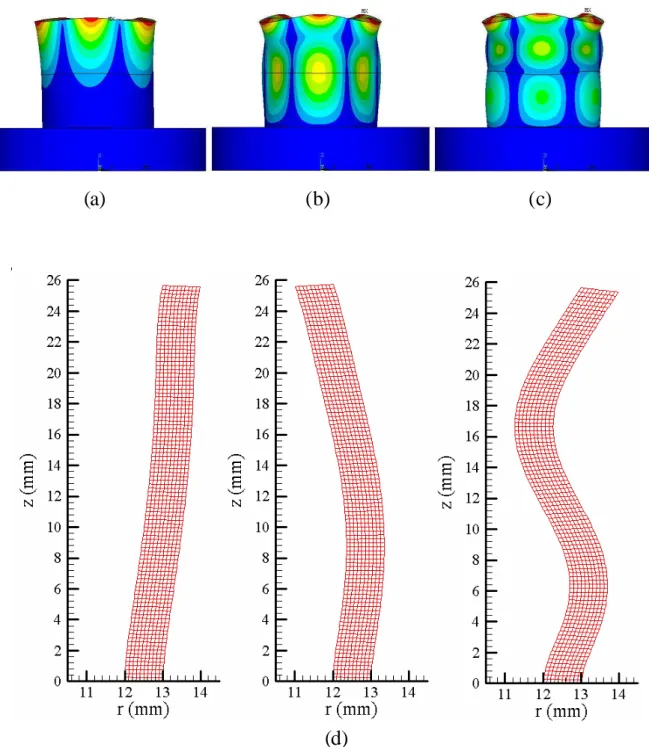
在邊界條件的設定上,將模型底部各節點的自由度設為零,圓管的脊 緣設為自由邊界,此外,壓電圓管的內外側圓周的電位差設為零,分別以 模態分析(modal analysis)及時諧分析(harmonic analysis)分析結構的共振模 態及振動響應。後處理則是將分析所獲得的數據進行後續處理。 2.3.1 共振模態與頻散曲線 超音波馬達定子結構的共振模態包含縱向模態、扭轉模態、撓曲模態。 縱向模態的運動方式為沿著軸向與徑向方向運動。扭轉模態運動方式則只 是沿著圓周方向轉動,兩者的場變數都與周向角度無關,圖 2.10 所示分 別代表縱向模態與扭轉模態的變形圖。本研究主要是以撓曲模態的共振響 應為超音波馬達的驅動力,以兩個整數(m, n)代表共振模態的編號及特徵, 其中,n 代表周向模態(circumference mode)數,m 則為軸向模態(axial mode) 數。如圖 2.8 所示,當 m = 1 時,馬達定子脊緣自由端分別產生 2、3、4、 5 個波形,波形的個數則代表周向模態數 n,當 n = 0 時,則此種模態變形 就如懸臂梁一般,圓管的 z 截面保持圓形,沒有波形產生,因此稱此模態
為梁模態(beam mode)。如圖 2.9 所示,由馬達定子的截面變形與懸臂梁振 動模態的圖形作比較,當 n = 3,m = 1、2、3 時,與懸臂梁一樣,定子結 構的軸方向上分別有 1、2、3 個零位移的節點,故軸向模態數 m 也可表示 為軸向變形時的零位移節點個數。因為本文探討的馬達定子底部固定,故 m 必大於 1。將撓曲模態的共振頻率代入下列公式,可計算導波的相速度 f n R f C 2 (2.29) 其中,C 為波速、為波長、 f 為共振頻率、 n 為圓周上導波的數目即為周 向模態數。由(2.29)式可建立波數與相速度相依之頻散曲線。 2.3.2 模態隔離 超音波馬達是以彈性振動的方式驅動馬達轉子旋轉,故共振頻率的確 認變得非常重要。雖然馬達的激振方式可以使特定模態比較容易被激發, 但是若其他模態的共振頻率與馬達的共振頻率相近時,可能也會被一併激 發,使得激振出的波形發生畸形,影響馬達的性能與可控制性。 模態隔離的概念就是藉著改變結構尺寸,使設計的馬達定子之驅動頻 率與相鄰前後兩個共振頻率隔離的較遠,確保其他共振模態不會產生,干 擾設計的行進波波形。本研究採用的馬達定子結構由壓電陶瓷圓管與不鏽 鋼基座所組成,壓電圓管是以粉末冶金的方式製作,不適合做後續的加工 改變外形,製造廠商也不可能提供符合模態隔離設計尺寸的壓電圓管,所 以本研究藉改變不鏽鋼基座的高度達成模態隔離的效果。 以馬達定子撓曲共振模態(1, 4)為例驅動超音波馬達,若單純考慮撓曲 模態的影響,當 H=0 時,(1, 4)模態與前後相鄰的共振模態分離最佳,與前 後的共振頻率相隔 11.7 kHz 與 17 kHz。若同時考慮扭轉模態或縱向模態的 影響,模態隔離程度就降低為僅 11.5 kHz。表 3 所列為(1, 4)共振模態在不 同高度 H 時,與前後兩個共振頻率的差值,當 H 等於 7.5 mm 與 12.5 mm
時,與鄰近的共振頻率相隔間距均約為 3 kHz 左右。圖 2.11 所示為雙維有 限元素法與 ANSYS 分析馬達定子基座高度 H = 0、12.5mm 的撓性波頻散 曲線圖,基座高度增加會降低周向撓性波的共振頻率。若考慮基座高度越 矮時,脊緣端受到定子底部的拘束條件限制,變形量降低,故以下設計都 將馬達定子的基座高度採為 12.5 mm。 在結構的設計階段,設計者通常會根據結構的頻率響應函數(frequency response function),判斷模態隔離的好壞。結構尺寸的調整有時造成特定模 態的共振頻率變化太大,以致超出觀察的頻率範圍,甚至無法辨別相鄰的 共振頻率是屬於何種共振模態,面臨左支右絀的窘況。上述的頻散曲線提 供兩個維度觀察各個共振頻率之間的模態隔離程度,改善頻率響應函數的 單一維度觀察,很容易找出相鄰共振頻率所屬的模態,適當地朝向正確的 方向調整結構尺寸。這是本研究期間的一項重要發現,有效提昇超音波馬 達的工作頻率與結構尺寸設計的效率。 2.3.2 雙相致動的合成響應 為了模擬行進波在馬達定子每個周向位置的振幅大小與相速度,本文 將相位差 90o的正弦函數 ) sin( t 與餘弦函數cos( t ,分別施予 A 與 B 兩組) 致動器,以 ANSYS 套裝軟體的時諧分析進行數值模擬。假設馬達定子的 阻尼係數為0.2%,以振幅 200 Vp-p的交流電壓輸入至兩組電極,模擬軸 對稱分佈電極與兩側配置電極生成的行進波位移響應。圖 2.12 所示為以(1, 4)模態的共振頻率驅動馬達定子,脊緣內側的行進波位移振幅與對應的相 位分佈,實線與虛線分別為軸對稱分佈電極與兩側配置電極的馬達響應, 兩者的相位幾乎呈線性分佈,代表行進波在圓管各周角的相速度為一定 值。由振幅的分佈可以明顯發現,軸對稱分佈電極的周向位移比兩側配置 電極者大,軸對稱分佈電極的撓性波振幅也幾乎為一個定值,表示以軸對
稱分佈電極驅動的馬達定子能夠生成位移振幅、相速度均勻的行進波。超 音波馬達定子脊緣內側質點因行進波而作橢圓形運動,藉摩擦力推動轉子 轉動,橢圓形運動軌跡的周向位移越大,可以代表馬達的性能越好,波形 均勻則代表行進波在任意位置的轉速都很平穩。數值模擬結果顯示軸對稱 分佈電極比兩側配置電極的運轉效果好,本文下一章將以試驗予以驗證。 圖 2.13 所示為以 n = 2、3、4 之軸對稱分佈電極激振(1, 2)、(1, 3)與(1, 4) 模態的行進波周向位移振幅分佈,數值結果說明圓管撓性波的周向模態數 愈大,脊緣端質點產生的位移量愈小。圖 2.13 亦顯示周向模態數越小,所 產生的行進波位移振幅越不均勻,此乃電極分佈較不均勻所致,超音波馬 達的設計尚需考慮所生成行進波的振幅大小與均勻度,才能提昇馬達運轉 的品質。
第三章實驗量測與結果討論
3.1 超音波馬達製作
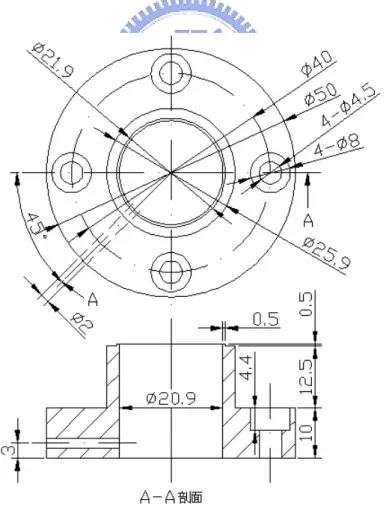
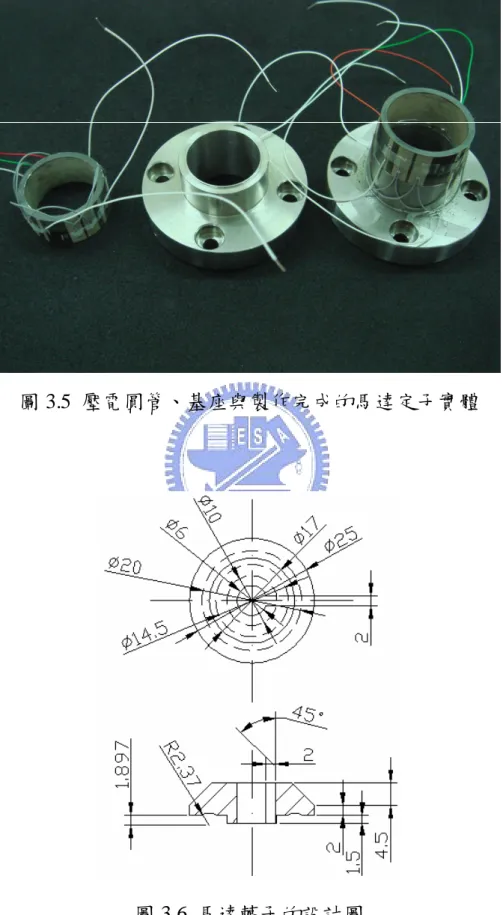
超音波馬達原型機的實作包括電極的佈置與馬達定子的製作兩部份。 3.1.1 電極塗佈 本研究發展的超音波馬達原型機採用的PZT-4壓電圓管為國內寰辰科 技公司(Eleceram Inc.)製造,壓電圓管是以粉末冶金的方式烘焗成型,再進 行極化。本研究先以硝酸將壓電圓管成品內外側的金屬電極洗掉,再依所 要激發的撓性波模態設計、塗佈電極於圓管表面。電極的佈置主要是以網 版印刷(screen printing)的方式,將銀膠印刷至壓電圓管上,作為換能器的驅 動電極。以AutoCAD套裝軟體先繪製出設計的電極圖案,再交由網版公司 製作成網版。圖3.1所示為電極佈置圖,黑色部份為電極,較粗的部份屬於 致動器,較細的部份則為模態感測器。一張網版含括幾種不同的電極圖案, 可以分別裁剪使用。製作完成的網版如圖3.2所示,由左至右分別代表周向 匝數n = 3的軸對稱分佈電極、n = 4的兩側配置電極及軸對稱分佈電極。網 版的黃色部份為電極區,銀膠可穿透過網版,均勻附著在壓電圓管上。電 極塗佈前,需先將網版緊貼在壓電圓管外表面,在網版上塗抹銀膠,再以 刮刀擠壓銀膠,使其通過網版上的電極區,最後將佈置好電極的壓電圓管 送入烤箱,在120oC溫度下烘烤10分鐘,使銀膠凝固,完成電極佈置。圖3.3 所示為分別為硝酸清洗前、後與佈好電極的壓電圓管。 3.1.2 超音波馬達製作流程 超音波馬達的主要構造為定子與轉子,其中以馬達定子的製作較為複 雜,定子結構可區分為壓電致動器與基座兩個部份,壓電致動器是已印刷好電極的壓電圓管。A、B兩組致動器的電極與壓電圓管的模態感測器之電 極各以銀膠黏著於一條導線,再送入溫度120o C的烤箱,烘焗10分鐘,完成 壓電致動器與模態感測器的接線。馬達定子的不鏽鋼基座是以車床加工方 式製作,圖3.4所示為定子基座的設計圖。根據2.3.2小節所述,以模態隔離 方式將定子基座高度設計為12.5 mm,基座上方設有0.5 mm的凸出高度,方 便將壓電圓管以環氧樹酯黏著於定子基座上。圖3.5所示為壓電致動器、定 子基座與製作完成的馬達定子。 馬達轉子的製作比較簡單,但需考慮轉子轉動慣量的影響。圖3.6所示 為馬達轉子的設計圖,以黃銅為材料(材料參數列於表2),車床加工製造, 重量為0.198 N,圖中R2.37 mm的圓弧凹槽是設計用以固定軸向負載的預壓 彈簧,壓電圓管脊緣端的內側與具45 斜錐面的轉子接觸。o 超音波馬達的組裝過程中,些微差錯常會使馬達轉動不順利,或造成 模擬與實驗量測的共振頻率誤差太大。譬如:壓電圓管與定子基座未能緊 密黏合,將使得馬達定子的撓性波變形無法集中於圓管的脊緣,導致壓電 圓管往復撞擊基座,發出尖銳的金屬雜音,基座也會發熱,甚至造成馬達 轉子無法轉動。
3.2 共振頻率量測系統
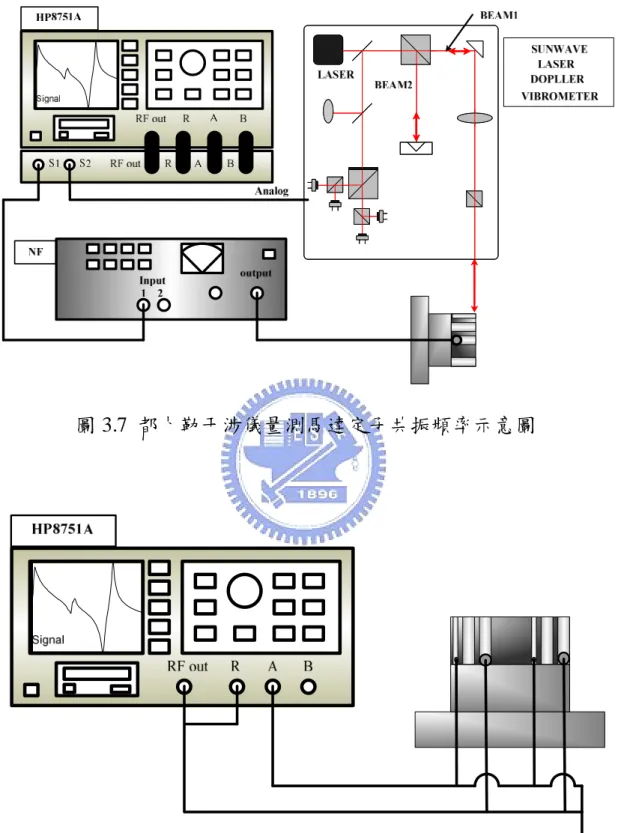
本研究採用兩種不同的方式量測超音波馬達的共振頻率,一是以網路 分析儀HP 8751A,量測馬達定子壓電圓管的模態感測器之阻抗曲線圖。另 一是以雷射都卜勒干涉儀(Laser Doppler Vibrometer, LDV)配合網路分析 儀,量測馬達定子外側機械振動的徑向位移頻率響應,並比較數值模擬結 果與共振頻率量測值的誤差。近年來,雷射都卜勒干涉儀已廣泛應用於量測結構振動速度與位移的 儀器,其原理是將雷射照射待測物的反射光與參考光進行干涉,由兩者的 光程差計算物體表面移動的速度或位移。本研究的量測儀器及裝置如圖3.7 所示,先以網路分析儀HP 8751A(Agilent Technologies, Santa Clara, CA, USA) 輸出振幅1伏特的正弦波訊號,經訊號放大器(power amplifier) NF-4051,增 益訊號40倍,再將電壓訊號輸出至馬達定子的其中一組致動器。以都卜勒 干涉儀量測壓電圓管脊緣外側表面的面外振動位移,量測所得位移訊號輸 至網路分析儀,將結構振動位移的頻率響應函數與輸入負荷的頻譜相除, 得到系統的頻率響應。由於振動量測受到環境擾動影響很大,故以後級放 大器增益輸出訊號,提昇量測系統的訊噪比。 3.2.2 頻譜響應 本研究以不同的周向模態及電極佈置型態激振馬達定子結構,由都卜 勒干涉儀量測馬達定子振動的頻率響應及對應的相位頻譜。圖3.9至3.14所 示分別為以周向匝數n = 2、3、4之軸對稱分佈電極激振馬達定子,所量側 的頻譜響應及對應之相位頻譜,周向模態(1,2)、(1,3)與(1,4)的共振頻率分 別為11.520 kHz、19.985 kHz及33.375 kHz。在軸對稱分佈電極n = 2的定子 頻率響應圖中,可觀察到周向模態(1,3)的頻率響應。在軸對稱分佈電極n = 3 的定子頻率響應圖中,只能從相位上觀察到周向模態(1,2)的頻率響應。但 是在軸對稱分佈電極n = 4的定子之頻率響應圖中,卻無法量測到周向模態 (1,3)的頻率響應。以高階周向模態分佈電極激振定子結構,量測的響應將 以對應的共振頻率響應為主。 比較圖3.13至3.16的結果,以周向匝數n = 4之軸對稱分佈電極激振馬達 定子,頻率響應顯示周向模態(1,4)之共振頻率為33,375 Hz。若以兩側配置 電極激振定子時,相位頻譜圖上明顯多了16,150 Hz與20,100 Hz兩組共振頻
率,分別代表周向模態(1, 1)與(1, 3)的共振頻率。因為兩側配置電極的分佈 不均勻,激振源的數量少,導致其他周向模態被激發。軸對稱分佈電極可 以準確激發所要的共振模態,比較不容易激發其他的共振模態。 最後,參考Meirovitch的振動學教科書[14],結構阻尼可由頻率響應函 數的品質因子 (quality factor) Q值獲得。本研究以馬達定子之振動頻率響應 函數,計算周向模態(1 ,2)、(1 ,3)與(1 ,4)之共振頻率的阻尼係數,然而因儀 器的解析度不足,故僅於共振頻率附近2 kHz的頻率範圍內量測,如圖 3.11、3.13、3.15所示虛線部份。以共振頻率最大振幅響應的-3dB處對應之 頻率值計算阻尼係數, n 2 1 2 (3.1) 其中,與1 分別代表共振頻率之-3dB處的前後兩個頻率,2 為結構的共n 振頻率,為阻尼係數。由上式計算出周向模態(1 ,2)、(1 ,3)與(1 ,4)的阻尼 係數分別為0.348%、0.325%與0.202%,比前述2.3.2小節所假設的阻尼係數 值0.2%略為大些。 3.2.3 網路分析儀 網路分析儀HP 8751A具有函數產生器、訊號擷取及分析的功能,可以 量測壓電材料的特性。圖3.8所示為馬達定子的阻抗量測裝置,網路分析儀 輸出振幅1伏特的正弦波訊號,至超音波馬達定子的A相致動器,另以模態 感測器接收因逆電壓效應,導致壓電圓管振動產生的電流訊號,最後由網 路分析儀量測出馬達定子結構的阻抗曲線圖。共振頻率對於實驗環境與邊 界條件相當敏感,為了以相似的箝制條件量測定子的共振頻率與測試馬達 性能,本研究設計了一個兩者兼顧的實驗平台,使得兩個實驗進行時的共 振頻率保持相同。
3.2.3 阻抗響應 圖3.17至3.19所示為以周向匝數n = 2、3、4的軸對稱分佈電極驅動馬達 定子,所量測出的阻抗曲線圖,在低頻範圍內的阻抗分佈,以周向模態(1, 2)、(1, 3)與(1, 4)的共振頻率響應最明顯,鄰近頻率範圍的共振模態幾乎無 法被激振出來。利用此型的電極可以量測高階模態的頻率響應,如圖3.20 至3.22所示,除了周向匝數n = 2以外,另外兩組電極配置的阻抗曲線圖可 以量測到高軸向模態(m > 1)之共振頻率響應,利用此種電極佈置方式可以 量測相同周向匝數之高軸向模態的共振頻率。 圖2.23與2.24所示為以兩側配置電極方式,量測周向匝數n = 4之共振頻 率,與軸對稱分佈電極的阻抗曲線相較,前者會激振出其他的共振模態, 以所欲驅動周向模態的共振頻率響應為最大。 表4所示為ANSYS模擬及實驗量測的馬達轉子共振頻率之比較,當周 向及軸向模態數越高時,量測值與模擬結果的誤差越大。壓電陶瓷粉末具 有異向性燒結的特性,本研究所採用的壓電圓管的管壁厚度及高度分佈不 均勻,模擬結果與量測值的誤差導致於定子結構的不均勻性。
3.3 超音波馬達的性能量測
馬達性能的評估通常以馬達的扭矩(torque)與轉速(revolution speed)為 準則,本節將介紹量測超音波馬達最大扭矩、最大轉速及轉速與扭矩的性 能曲線之裝置。周向模態(1,2)的共振頻率不屬於波音波的頻率範圍,且扭 矩太小,無法以目前所擁有的實驗儀器量測,故本研究僅測試周向模態(1,3) 與(1,4)驅動的超音波馬達,探討不同電極配置與周向模態驅動的馬達性 能,並以模態感測器監測馬達的運轉狀況。 3.3.1 模態感測器訊號分析模態感測器除了可以量測共振頻率之外,還可監測馬達定子工作時的 狀況。圖 2.25 與 2.26 所示為軸對稱分佈電極以周向模態(1,3)、(1,4)驅動超 音波馬達,所量測得到模態感測器訊號。馬達定子產生行進波時,若未加 轉子負載,各感測器所量得訊號的振幅與相位皆一致,隨時間呈現完整的 弦波波形。當馬達定子承受負載時,定子因外力作用使得應變增加,壓電 圓管產生正壓電效應,故訊號振幅較沒加負載時大,且相位會有偏移的現 象。如圖 3.27 所示,若以不同的頻率驅動周向匝數 n = 4,且兩側配置電極 的定子,訊號呈現扭曲現象且振幅較小,故模態感測器也可用於檢測馬達 的驅動頻率是否因磨耗而改變。 3.3.2 性能試驗 超音波馬達的性能試驗裝置如圖 3.28 所示,函數產生器輸出頻率與馬 達定子特定周向模態共振頻率相同的弦波訊號,經由相移器與功率放大器
(piezo amplifier, model EPA-104),輸出兩組相位差±90o的訊號至馬達定子的
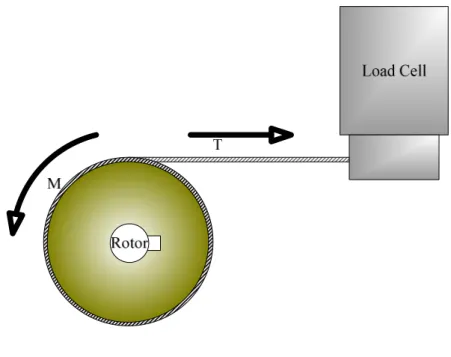
A、B 致動器,產生行進波。轉子受摩擦力推動時,鍵槽帶動馬達的轉軸, 由聯軸器連接轉軸與編碼器(encoder, HRT-3A/1000 ppr, Hontko Inc.),計算 馬達的轉速。另外,以 Futek 公司的荷重元(load cell, LSM400)與砝碼量測 馬達的扭矩。實驗的自動化量測系統採用 NI 公司的 PCI -7344 運動控制卡 讀譯碼器的數位訊號,並以 PCI-6035E 資料擷取卡讀取荷重元之類比訊 號,透過 LabView 圖控軟體顯示超音波馬達的轉速與扭矩值。本實驗以編 碼器配合荷重元,量測馬達在不同扭矩下的轉速。轉子與棉線間是可滑動 的,轉子另一端切線方向懸掛不同重量的砝碼,量測馬達的扭矩。 3.3.3 最大扭矩量測試驗 圖 3.29 所示為超音波馬達最大扭矩(holding torque)的量測示意圖,利
用前述的荷重元為拉力感測器,在馬達轉子的切線位置以棉繩連結。為了 讓馬達轉子與棉繩之間的摩擦力增加,首先把棉繩浸濕,讓棉繩較沒有伸 縮性,更能附著在馬達的轉子上,量測驅動瞬間最大的拉力,擷取卡讀取 荷重元訊號,由電腦內部程式計算獲得馬達最大的扭矩。量測過程要隨時 注意轉子是否滑動,若有些微滑動就必須重新調整棉繩與轉子的鬆緊度。 3.3.3 馬達的性能分析 實驗中,轉子作用於馬達定子的預負載調整是以壓縮彈簧在線性範圍 內操作,圖 3.30 所示為彈簧特性圖。當彈簧壓縮量達 2 mm 以上時,彈簧 壓縮量與軸向施力呈線性關係。本實驗在此線性區域下,調整馬達預負載 大小,並量測馬達轉速與最大扭矩對於預負載的影響。圖 3.31 與 3.32 顯示 預負載對於馬達最大扭矩與最大轉速的變化,可找出最佳的預負載大小。 若驅動之交流電壓為 200 Vp-p,以周向模態(1,3)及(1,4)之共振頻率驅動周向 匝數 n = 3、4 之軸對稱分佈電極的馬達,所產生最大扭矩分別為 6.9、22.6 mN-m,最大轉速分別為 200、334 rpm。若以周向模態(1,4)之共振頻率驅動 周向匝數 n = 4 之兩側配置電極的馬達,最大扭矩達 8 mN-m,最大轉速為 265 rpm。上述三組量測的最佳的預負載大小分別為 0.497、0.664 及 0.497 N。 若以兩種不同的電極佈置驅動周向模態(1,4)的超音波馬達,軸對稱分 佈電極者明顯比兩側配置電極者產生的扭矩大,轉速也較快。若以不同周 向模態的軸對稱分佈電極驅動馬達時,高階模態的馬達轉速與扭力皆較低 階者大。圖 3.33 所示為三種型態的馬達扭矩與轉速曲線圖,以周向模態(1,4) 之共振頻率驅動周向匝數 n = 4 之軸對稱分佈電極的馬達性能最好。 圖 3.34 所示為各馬達的轉速與驅動電壓的關係曲線,試驗結果顯示驅 動電壓小於 100 Vp-p時,轉速會急速下降。以周向模態(1,4)之共振頻率驅動 兩側配置電極的馬達需要 96 Vp-p才可驅動,但以周向模態(1,3)與(1,4)之共
振頻率驅動周向匝數 n = 3、4 的軸對稱分佈電極之馬達,在 70 Vp-p就可驅 動,增加馬達致動電極的數目可明顯增加驅動能力。
第四章 結論與展望
本研究成功地發展出一種以圓管脊緣撓性波驅動的新型超音波馬達, 以數值模擬及實驗實作方式探討不同的電極佈置對於超音波馬達性能的影 響,本章總結數值模擬與試驗結果,提供日後相關研究的參考。4.1 結論
4.1.1 模擬結果分析 本研究應用 ANSYS 套裝軟體,對於不同電極佈置的馬達定子進行時 諧分析,模擬結果顯示軸對稱分佈電極者的周向位移比兩側配置電極者 大,軸對稱分佈電極生成的行進波沿馬達定子的脊緣傳遞,其相速度與位 移振幅均勻分佈,幾乎為一個定值,表示軸對稱分佈電極產生的行進波較 穩定。若以不同的周向模態驅動超音波馬達,周向匝數 n 越小,位移振幅 越大,但是在不同周向位置的行進波位移振幅跳動,造成馬達轉速不穩定。 本研究應用雙維有限元素法分析壓電圓管脊緣撓性波的頻散曲線及共 振模態,該方法適合分析圓管狀馬達定子脊緣的行進波及駐波。有效運用 模態隔離的概念設計馬達的結構尺寸,數值結果顯示基座高度`H = 7.5 mm 及 12.5 mm 時,周向模態(1 ,4)與鄰近模態的共振頻率間隔達 3 kHz。若基 座高度越矮,脊緣撓性波受到底部的拘束條件限制,位移量易降低,故本 研究以基座高度為 12.5 mm 的超音波馬達製作原型機,進行性能試驗。 4.1.2 實驗結果分析 馬達定子的測試結果發現模態感測器的設置位置會影響所量得的頻率 響應,若模態感測器分佈在共振模態位移最大的位置,該模態的共振頻率 的響應最為明顯。致動器的電極佈置也會影響共振頻率響應的大小,以軸對稱分佈電極量測的頻率響應之對比最為明顯。高階周向模態的共振頻率 量測值與數值模擬結果的誤差較低階模態大,可能肇因於壓電圓管的異向 性燒結特性,致使成品的管壁厚度不均勻所致。本研究以低階周向模態之 撓性波驅動超音波馬達,數值模擬與試驗結果的一致性高。 在超音波馬達原型機的性能測試試驗中,預負載愈大,扭矩及轉速隨 之增大,漸而減少。軸對稱分佈電極驅動的馬達扭矩及轉速較兩側配置電 極驅動者大。若以軸對稱分佈電極驅動不同周向模態,高階周向模態者的 性能較低階周向模態者優。低階周向模態者生成的行進波位移振幅較不穩 定,與定子的接觸點較少,導致轉速不穩定,影響馬達性能。
4.2 未來展望
本研究採用的壓電圓管是以粉末冶金的成型技術製作,壓電圓管的幾 何尺寸較難控制在一定的公差,也較難利用工具機改善馬達定子結構的同 心度及精度。未來可考慮利用以車床加工的元件作為定子的主要結構,減 少馬達轉子無法與定子結構對準中心的問題。數值分析的部份可進一步模 擬超音波馬達的暫態響應(transient response),並以接觸力學模型分析馬達 定子與轉子之間的磨潤問題。參考文獻
[1] P. E. Lagasse (1972), “Analysis of a dispersion free guide for elastic
waves,” Electronics Letters, 8(15), 372-373.
[2] P. E. Lagasse, I. M. Mason, and E. A. Ash (1973), “Acoustic surface
waveguides - analysis and assessment,” IEEE Transactions on Microwave
Theory and Techniques, 21(4), 225-236.
[3] V. V. Krylov (1994), “Propagation of wedge acoustic waves along wedges
imbedded in water,” IEEE Ultrasonics Symposium, 793-796.
[4] V. V. Krylov and G. V. Pritchard (2007), “Experimental confirmation of
the propulsion of marine vessels employing guided flexural waves in attached elastic fins,” Journal of Fluids and Structures, 23(2), 297-307
[5] V. V. Krylov and G. V. Pritchard (2007), “Experimental investigation of
the aquatic propulsion caused by localized flexural wave propagation in immersed wedges and plates,” Applied Acoustics, 68(1), 97-113
[6] A.C. Hladky-Hennion (1996), “Finite element analysis of the propagation
of acoustic waves in waveguides,” Journal of Sound and Vibration,
194(2), 119-136.
[7] 陳俊男,線型與圓柱型聲波導的雙維有限元素分析,國立交通大學機
械工程學系碩士論文,新竹市,台灣,民國91年
[8] T. Sashida and T. Kenjo (1993), An Introduction to Ultrasonic Motors,
Clarendon Press, Oxford.
[9] S. Ueha, Y. Tomikawa, M. Kurosawa, and N. Nakamura (1993),
Ultrasonic Motors: Theory and Applications, Clarendon Press, Oxford.
[10] M. Aoyagi, Y. Tomikawa, and T. Takano (1992), “Ultrasonic motors using longitudinal and bending multimode vibrators with mode coupling by externally additional asymmetry or internal nonlinearity,” Japanese
[11] B. Koc, S. Cagatay, and K. Uchino (2002), “A piezoelectric motor using two orthogonal bending modes of a hollow cylinder,” IEEE Transactions
on Ultrasonic, Ferroelectrics, and Frequency Control, 49(4), 495-500.
[12] M. Tominaga, R. Kaminaga, J. R. Friend, K. Nakamura, and S. Ueha (2005), “An ultrasonic linear motor using ridge-mode traveling waves,”
IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 52(10), 1735-1742.
[13] A. Iula and M. Pappalardo (2006), “A high-power traveling wave ultrasonic motor,” IEEE Transactions on Ultrasonics,Ferroelectrics, and
Frequency Control, 53(7), 1344-1351.
[14] L. Meirovitch (2001), Fundamentals of vibrations, McGraw-Hill, New York, 114-117.
[15] 吳朗,壓電陶瓷,29-31,全新資訊圖書,台北市,民國83年。 [16] 陳啟陞,蝶型壓電馬達之結構動態分析,國立交通大學機械工程學系
表 1 壓電陶瓷 PZT-4 的材料參數 彈性係數(GPa) 11 C C12 C13 C33 C44 139 77.8 74.3 115 25.6 壓電係數(Coulomb/m2) 介電係數 15 e e31 e33 ε11/ε0 ε33/ε0 12.7 -5.6 15.1 730 635 ※ 12 0 8.854 10 ε farads/m 表 2 不鏽鋼(SUS)與黃銅金屬的材料參數 不鏽鋼 密度(g cm3) 楊氏係數E (GPa) 蒲松比 7.82 201.25 0.29 黃銅 密度(g cm3) 楊氏係數E (GPa) 蒲松比 8.47 105.46 0.34
表 3 圓管狀馬達定子撓性波(1,4)模態與鄰近模態共振頻率 基座高度 H (mm) 鄰近共振頻率 (kHz) (1, 4)共振頻率 (kHz) 鄰近共振頻率 (kHz) 0 24.295 (1,1) (11.694) 35.989 37.508 (T) (1.520) 2.5 22.408 (1,1) (13.003) 35.411 35.722 (T) (0.311) 5 33,957 (T) (1.181) 35.138 41.964 (L) (+6.826) 7.5 31.242 (T) (3.6) 34.842 38.659 (2,2) (3.817) 10 34.505 (T) (1.418) 35.923 38.839 (2,2) (2.916) 12.5 31.893 (2,2) (3.045) 34.938 38.784 (L) (3.846) 15 28.911 (2,2) (6.041) 34.952 36.800 (1,2) (1.848) (m,n):flexural mode、 (L): longitudinal mode、(T):torsional mode
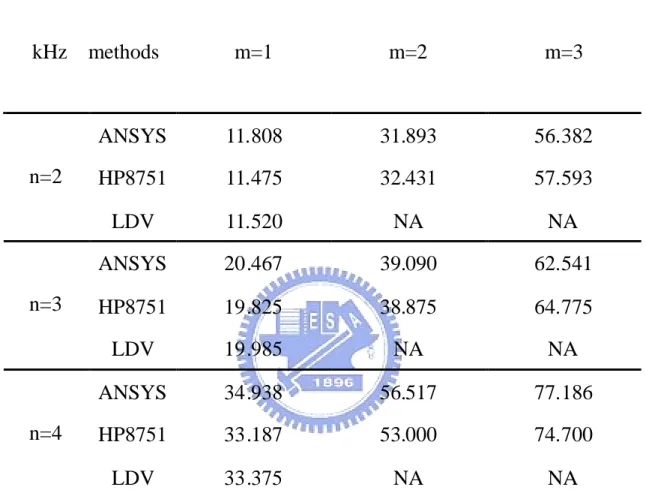
表 4 馬達定子撓性波共振頻率的數值模擬結果與實驗值之比較 kHz methods m=1 m=2 m=3 ANSYS 11.808 31.893 56.382 HP8751 11.475 32.431 57.593 n=2 LDV 11.520 NA NA ANSYS 20.467 39.090 62.541 HP8751 19.825 38.875 64.775 n=3 LDV 19.985 NA NA ANSYS 34.938 56.517 77.186 HP8751 33.187 53.000 74.700 n=4 LDV 33.375 NA NA
圖 2.1 駐波式超音波馬達區的驅動原理與構造[16]
1 V V2 圖 2.2 行波式超音波馬達的工作原理示意圖[16] (a) (b) 圖 2.3 (a)本文的超音波馬達主體結構:上半部為壓電圓管,下半部 為不鏽鋼基座;(b)本文的超音波馬達的工作原理示意圖。 波傳方向 預負載 轉子運動方向 Asint Acost 定子 r 定子表面質點 作橢圓形運動 轉子
圖 2.4 單方向波傳之行進波激發電極佈置示意圖
(a) (b)
12.95 2 0.5 25 單位 : mm . 圖 2.6 超音波馬達定子的幾何尺寸 圖 2.7 超音波馬達的有限元素模型網格
(a) (b)
(c) (d)
(a) (b) (c)
(d)
圖 2.9 超音波馬達定子的軸向模態 m = (a) 1、(b) 2、(c) 3,對應 (d)圓管截面變形
(a) (b) 圖 2.10 超音波馬達定子的(a)縱向模態及(b)扭轉模態 0 0.2 0.4 0.6 k (1/mm) 0 20 40 60 80 100 F re q u en cy (k H z) h=12.5 (2-D FEM) h=12.5 (ANSYS) h=0 (2-D FEM) h=0 (ANSYS) m=3 m=2 m=1 圖 2.11 基座高度 H = 0 及 12.5 mm 的馬達定子脊緣撓性波頻散曲線
-200
-100
0
100
200
300
P
h
as
e
(d
eg
re
e
)
phase-180
-90
0
90
180
Circumference (degree)
0
0.4
0.8
1.2
1.6
2
u
(1
0
-2m
/V
p p)
axisymmetric layout opposite-side layout 圖 2.12 軸對稱分佈電極(實線)與兩側配置電極(虛線)驅動周向模態 (1, 4)之行進波位移振幅與相位分佈(破折線)-180
-90
0
90
180
Circumference (degree)
0.2
0.6
1
1.4
1.8
2.2
u
(1
0
-2m
/V
p p)
(1,2) mode (1,3) mode (1,4) mode 圖 2.13 軸對稱分佈電極驅動周向模態(1,2)、(1,3)、(1,4)之 行進波位移振幅分佈圖 3.1 電極佈置設計圖
圖 3.3 PZT-4 壓電圓管(自左依序為清洗電極前、後及佈好設計之電極)
圖 3.5 壓電圓管、基座與製作完成的馬達定子實體
圖 3.7 都卜勒干涉儀量測馬達定子共振頻率示意圖