國立交通大學
機械工程研究所
碩 士 論 文
使用類神經網路與模糊法評估
分心因素對車輛駕駛行為之影響分析
A Neural Network and a Fuzzy Evaluation of Driving
Safety as Influenced by Distraction of Drivers
研 究 生:鍾建邦
指導教授:秦繼華 教授
中 華 民 國 九 十 八 年 六 月
使用類神經網路與模糊法評估
分心因素對車輛駕駛行為之影響分析
A Neural Network and a Fuzzy Evaluation of Driving Safety as Influenced by Distraction of Drivers國 立 交 通 大 學
機械工程研究所
碩士論文
A Thesis Submitted to Institute of Mechanical Engineering College of Engineering National Chiao Tung University in Partial Fulfillment of the Requirements for the Degree of Master of Science in Mechanical Engineering June 2009 Hsinchu, Taiwan, Republic of China中 華 民 國 九 十 八 年 六 月
研 究 生:鍾建邦
指導教授:秦繼華 教授
Student:Chien‐Pang Chung
Advisor:Dr. Jih‐Hua Chin
使用類神經網路與模糊法評估
分心因素對車輛駕駛行為之影響分析
學生:鍾建邦 指導教授:秦繼華
國立交通大學機械工程研究所摘要
本研究從駕駛者的觀點出發,依據駕駛者的表現行為,如反應時 間與心跳率此二項量測數據,使用具有學習能力的類神經網路及加入 專家知識規則之模糊邏輯控制,建立安全程度評估系統,分析在分心 因素影響下,駕駛者的安全程度,以期能夠達到預警作用,降低因分 心而造成的事故發生率。A Neural Network and a Fuzzy Evaluation of Driving Safety as
Influenced by Distraction of Drivers
Student:Chien-Pang Chung Advisor:Jih-Hua Chin
Institute of Mechanical engineering
National Chiao Tung University
ABSTRACT
This thesis measures the parameters of drivers’ behavior like the response time and the heart rate. For the safety evaluation, the thesis combines neural network which has the learning capability and fuzzy logics which carries the rule base from expert’s knowledge, and then establishes the safety degree evaluation system to analyze the drivers’ safety degree when they are distracted. The safety degree evaluation system raises an alarm in time when drivers are going to be distracted.
誌 謝
首先,感謝我的指導教授秦繼華秦教授,自學士班時期以來,即 在老師開授的課程中得到不少的啟發,深受老師的人格特質與想法所 吸引;碩士班期間更感謝老師不厭其煩的指導,並且同時讓我們能有 實行個人在研究上種種想法的機會,不只是學術上或本篇論文的指導, 秦老師給予我很多為人處世及態度上的啟發,非常感激老師數年來的 教導。此外,亦感謝口試委員周長彬老師、楊秉祥老師不吝給予此篇 論文專業與寶貴的看法與意見,使得本篇論文更為嚴謹、完整。 再來,感謝實驗室建誠學長的協助,在研究遭遇瓶頸時給予我不 同的意見和方向,讓我的研究進度在走進死胡同時能夠重新找到原來 應有的方向,繼續順利進展;感謝實驗室同學家翊的幫忙,讓本研究 於實驗設置和 LabVIEW 程式撰寫變得很順利。亦感謝女友孟璇,在論 文撰寫的時期在旁的體貼陪伴,並且也感謝交通大學應藝所97級的 朋友們在這段期間的鼓勵、支持與包容,多虧有了你們,才能在愉快 且舒適的氣氛與環境下完成本篇論文。還要感謝家中兩隻貓咪,臭咪 和黑嚕,謝謝你們總是讓回到家後疲憊不堪的我馬上又擁有笑容。 最後,感謝我的父母親,謝謝你們在精神與物質上雙方面的全力 支持,讓我能夠無後顧之憂地依照自己的人生規畫一步一步去進行與 實踐,順利地完成了碩士畢業論文,也找到了更為清晰的人生方向。目 錄
中文摘要...i 英文摘要...ii 誌謝...iii 目錄...iv 圖目錄...vii 表目錄...ix第一章 緒論...1
1.1 研究背景...1 1.2 文獻回顧...2 1.3 研究動機與目的...5 1.4 研究方法...7第二章 模糊理論與類神經網路介紹...9
2.1 模糊理論介紹...9 2.1.1 模糊邏輯規畫...9 2.2 模糊系統的流程...11 2.2.1 模糊化...11 2.2.2 模糊規則表與推論...13 2.2.3 解模糊化...162.3 類神經網路介紹...17 2.3.1 類神經網路簡介...17 2.3.2 倒傳遞類神經網路原理...19
第三章 實驗的前置作業與內容...20
3.1 量測心跳率...20 3.2 量測反應時間與記錄心跳率之介面...20 3.2.1 LabVIEW 簡介...20 3.2.2 程式設計三部分...21 3.2.3 介面程式運作說明...25 3.3 安全評估系統...27 3.3.1 結合模糊邏輯控制與類神經網路的評估系統...27 3.3.2 自我能力評估問卷與問卷子系統...29 3.3.3 倒傳遞類神經網路子系統...32 3.4 實驗裝置、器材與實驗規畫...35 3.4.1 實驗裝置與器材...35 3.4.2 實驗規畫...38 3.4.3 實驗步驟...39第四章 實驗結果討論...41
第五章 結論與檢討...46
5.1 結論...46
5.2 檢討與建議...47
圖 目 錄
圖 1.1 感知反應時間(PRT)與 iPod 操作難易度關係圖...3 圖 2.1 模糊控制架構示意圖...10 圖 2.2 歸屬函數示意圖...11 圖 2.3 模糊化示意圖...12 圖 2.4 「最大-最小合成法」之模糊推論示意圖...15 圖 2.5 類神經元示意圖...17 圖 2.6 單一隱藏層之倒傳遞類神經網路架構...19 圖 3.1 LabVIEW 人機介面...22圖 3.2 LabVIEW 程式的 Block Diagram...24
圖 3.3 LabVIEW 程式進行圖...26 圖 3.4 安全評估系統流程示意圖...29 圖 3.5 問卷子系統用以調整主系統歸屬函數的方法示意圖...31 圖 3.6 調整後安全程式歸屬函數圖形示意圖...33 圖 3.7 實驗用車,Peugeot 406 SV D8 2.0L...35 圖 3.8 EeePC 架設圖...36 圖 3.9 答案輸入無線裝置架設圖...37 圖 3.10 心跳率記錄用數字鍵盤...37
圖 3.11 心跳量測錶...38 圖 4.1 安全程度評估值與分心因素關係圖...42 圖 4.2 BPN 子系統啟動與否比較圖...44
表 目 錄
表 1.1 年輕乘客對年輕駕駛的影響...4 表 2.1 安全評估主系統之歸屬函數設定值表格...13 表 2.2 安全評估系統之模糊規則表...14 表 3.1 LabVIEW 人機介面功能解說表...26 表 3.2 問卷內容表...30 表 3.3 問卷各選項與相對應輸入值對照表...30 表 3.4 歸屬函數與描述項目對應表...31 表 3.5 問卷子系統之歸屬函數設定值表格...31 表 3.6 問卷子系統之模糊規則表(1)...32 表 3.7 問卷子系統之模糊規則表(2)...32 表 3.8 實驗用車規格表...35 表 3.9 分心因素之定義與描述...39 表 4.1 實驗結果的安全評估值表格...41第一章 緒論
1.1 研究背景 由於汽車工業的快速發展,使得汽車已成了現今社會快速且便利 的交通工具之一。隨著汽車的普及化,伴隨而來的是駕駛車輛所造成 的交通事故傷害。由內政部警政署的調查顯示,高達百分之九十五的 事故皆為人為疏失所致。因此國內外學者皆積極地將心思投入在研究 駕駛行為的領域裡。於車輛硬體方面,目前已有一些針對人為因素意 外而研發的被動式配備,如全速域適應性巡航控制系統與車道偏離警 示系統(Lane Departure Warning System,LDWS)等等。雖然輔助 設備可以協助減低事故的發生率與事故發生後的嚴重性,但若能夠真 正探討駕駛者本身於道路交通行為的表現,如此一來更能深入分析駕 駛者在道路行為表現的原因。「分心駕駛」(Distracted Driving)此議題近年來於國際間受 到相當的重視,美國國家公路安全局 NHTSA(National Highway Traffic Safety Administration)從警方碰撞事故報告中估計至少 25%的事故發生是歸因於駕駛者注意力分散,由此可知駕駛者本身的 專注力與駕駛時的生理狀況是值得注意的。如果能夠藉由駕駛者於行 車中的表現,提前得知該駕駛的行為受到分心因素影響而使得行車變
得不安全,事先採取預警措施,應可降低事故的發生率。 1.2 文獻回顧 於 NHTSA 中,Noy[1]定義了開車時的分心(Distraction)現象: 分心是指因為一件必須去做的事而將開車任務的專心度轉移。 Goodman[2]將駕駛者發生分心駕駛的影響因子區分為五大類:視覺分 心,聽覺分心,生物力學分心,認知分心與疲勞分心。視覺分心是指 對車外的人、事、物,以及導航系統而產生分心;聽覺分心是指使用 行動電話、與乘客交談、聆聽音樂或廣播節目而產生分心;生物力學 分心是指操作車內設備,如汽車音響、iPod 操作、收音機、導航系 統或空調設備等而產生分心;認知分心則是指在開車的同時必須作額 外的思考或判斷,例如找尋路標等而產生分心。 目前駕駛行為的相關探討常常著重在處於突發事件中的感知反 應時間(Perception Reaction Time,PRT),也就是駕駛者在突發狀 況前的專心程度高低。當專心程度低時,感知反應時間就會拉長,造 成駕駛者無法即時做出煞車或轉向等反應而容易導致交通事故;相對 之下專心程度高時,駕駛的感知反應時間縮短,較易應付緊急狀況的 發生。Chisholm 等人的研究[3],以平均年齡為 19.4 歲(年齡範圍 為 18 至 22 歲)的年輕駕駛者對研究對象,使用卡加立大學行車模擬
系統(the University of Calgary Driving Simulator,UCDS),模 擬受試者在操作音樂播放設備 iPod,同時遭遇突發狀況如行人衝出、 前車緊急煞車時,受試者的反應時間、視線移動狀況等等的行為表現。 文中指出受試者會因為操作 iPod 任務之繁簡而影響對突發狀況的反 應時間。當操作 iPod 的任務較困難或複雜,反應時間較長;操作 iPod 的任務較容易或單純,反應時間則較短。 圖 1.1 感知反應時間(PRT)與 iPod 操作難易度關係圖[3] 美國的 Katherine 等人的研究[4]指出,年輕駕駛人載乘未滿 20 歲的年輕乘客(teenager)時,具有較高的事故發生風險之現象,並 針對加州年輕駕駛人受到年輕乘客影響而產生分心的現象加以分析, 對 2,144 位加州高等學校學生(California high school seniors) 做調查 ,列出乘客對駕駛容易產生分心影響的因素之百分比,其中 百分比前三高的分別為「聊天、叫喊」(44.7%),「戲謔、開玩笑的行 為」(22.4%)以及「聽音樂和在車中的舞蹈動作」(15.5%)。
表 1.1 年輕乘客對年輕駕駛的影響 [4] 於疲勞分心的探討,當駕駛人產生駕駛疲勞現象時,常見的徵狀 為眼皮沉重、想睡覺或者是打瞌睡。Nilsson 等人的研究[5]使用駕 駛模擬器為實驗平台,配合生理問卷與疲勞問卷使用,研究結果發現, 「腳酸」、「眼睛疲累」與「昏昏欲睡」的疲勞現象最為顯著,而疲勞 累積與實驗時間大致呈一線性正相關的關係;而不同受測者間,對於 達到相同程度的疲勞水準雖有時間上之差異,但多數人所能忍受之駕 駛時間大約為八小時。Eriksson 等人所進行的研究[6]中,透過偵測 瞳孔的活動來分析駕駛人是否疲勞,實驗結果發現利用瞳孔進行疲勞 偵測的方法具有良好成果,具辨識率極高。Brown 則認為,駕駛人在 疲勞時自我監測的能力也隨之下降,瞳孔偵測系統雖可量測駕駛人疲 勞與否,卻不能得知駕駛人在何時會進入睡眠狀態。因此 Brown[7] 認為應以「方向盤操作穩定度」作為判斷駕駛人想睡覺程度的衡量指 標。Otmani 等人的研究[8]中也證實了操作方向盤幅度與車輛橫向位
置變化會隨著開車的時間增加而增加,因此可使用車輛橫向位置或方 向盤的操作幅度變化作為衡量駕駛疲勞的指標。 在疲勞偵測技術方面的相關研究,Fukuda等人的疲勞判斷研究 [9]中,Fukuda 利用感測器偵測方向盤轉向角度和時間的關係,當 速度越快時需要越短的反應時間,當駕駛反應時間越長時表示駕駛 人反應較不靈敏電腦即判斷駕駛人為疲勞狀態。 Li.等人所進行研究[10],乃以一模擬高速公路之場地進行實車 測試,實驗時間為3 小時,其將受測者分為二組,一組施以針灸方式 改善疲勞症狀,一組則無任何疲勞改善對策,以比較二實驗組間之差 異;實驗車輛上並無裝設任何行車資訊感應設備,亦無記錄任何行車 資料,然其使用心率量測儀器,用以記錄受測者心跳狀態,並分析受 測者實驗期間的生理狀態。發現當受測者隨著疲勞駕駛的狀態越明顯 時,其心跳頻率便愈為緩慢,經統計檢定後發現於實驗前後,其心跳 頻率具有顯著差異性。 1.3 研究動機與目的 由前述,我們可得知各種已被探討研究的分心駕駛因素,如四大 類的分心因子(視覺分心,聽覺分心,生物力學分心,認知分心與疲
勞分心),以及駕駛者在分心狀況下的行為表現。由文獻可見,分心 所造成的影響可以藉由量測各種不同的因子而察覺,如感知反應時間、 心跳率、瞳孔疲勞偵測、方向盤轉動變化程度等等。 而在提及的相關文獻裡,於數據分析與安全程度的強弱判別上, 僅對實驗量測出來的數值與繪圖進行數值上的比較並口頭述說分心 程度的強弱,或者藉由受試者填寫問卷得知,對分心與安全的強弱程 度界定並不明確。我們預期本研究能夠藉由駕駛者本人的生理狀況表 現,佐以駕駛者本人對自我能力的認知作為分析系統的個人化細微調 整,以進行安全評估,並將其受到分心影響所導致的安全程度給數值 化,使得安全程度有個限定的數值範圍與參考標準,可被客觀討論。 並且進一步建立起合適的評估分析系統,可將量測到的數據直接送入 系統做安全程度的運算與評估。 在評估安全程度方面,由於分心是一種模糊性(fuzziness)的 生理現象,無法客觀而量化的表現出來,必須藉由模糊理論的概念, 加入具有專家知識的規則庫,將模糊性的現象做量化的控制或分析。 因此,邱偉源的碩士論文[15]中使用模糊邏輯,經由模糊規則與運算, 來判斷駕駛者的分心程度。為了使得安全程度可被量化表示,我們沿 用模糊理論的使用,以其架構分析系統的主體。但事實上,每位駕駛 者具有各自獨特的操作習慣與不同的生理特質,即使在同樣的行車狀
況下,量測出來的行為表現數值也可能存在些許差距,例如,每個人 在正常的行車狀況下,心跳率的數值也可能因受試者而不同。在安全 評估系統的模糊邏輯中,我們需要決定歸屬函數(membership function)的確切圖形與模糊規則表(Fuzzy Rule Table)的規則, 若只是以研究者私自的認知而草率決定這些資料與參數,可能無法客 觀地分析實驗數值,判斷其安全程度。 因此,本研究希望建立一個以模糊理論為主架構,並以類神經網 路和簡單的模糊邏輯為輔助,設計一個可以調整系統內部參數的行車 安全評估系統,讓此系統在安全程度的評估上更客觀可信。 1.4 研究方法 於本研究中,我們使用模糊理論中的模糊邏輯建立起安全評估系 統的分析主體。數據採集方面,於駕駛者的表現行為上,我們採集駕 駛者的感知反應時間與心跳率的數值,當作駕駛者的表現依據,並將 此二值作為安全評估系統的輸入。再來,由於感知反應時間與心跳率 的數值輸入系統後必須模糊化,經由歸屬函數的運算而得到感知反應 時間與心跳率的歸屬度,再根據模糊規則表之規則解模糊化以得到安 全值,因此,在這個系統中,必須明確定義或調整的部分有以下幾項: 感知反應時間與心跳率的歸屬函數、模糊規則表、安全程度的歸屬函
數以及選擇解模糊化的方法。關於本研究的安全評估系統之模糊規則 表的訂定、安全程度的歸屬函數以及所選用的解模糊化方法,將於本 文的第二章做詳細的論述。 為了使分析結果更為客觀,本研究進行安全評估系統輸入值之歸 屬函數的調整,使系統更加吻合每位駕駛者各別獨特的生理特色。本 研究設計了兩種調整方式:第一種調整方式,設計個人能力的自我評 鑑問卷以供受試者填答,將所得到的問卷分數經由一個專為問卷設計 的模糊邏輯系統做分析,得到相對應的調整值,對歸屬函數圖形的一 部分參數值加以調整;第二種調整方式則是使用類神經網路,藉其學 習能力,針對駕駛者在正常行車狀況下的行為表現數值進行學習,調 整模糊分析系統中歸屬函數另一部分的參數值。 本研究結合上述兩種方式對模糊分析系統輸入值之歸屬函數圖 形的參數作調整,使系統的設定依照每位受試者的表現狀況做合適的 調整,以期達到更可信的評估品質。
第二章 模糊理論與類神經網路介紹
2.1 模糊理論之介紹 在真實世界中,人類的思維概念、語意表達以及感覺判斷等都存 在著模糊(fuzzy)的現象。模糊現象一般來說就是不精確、模稜兩可、 多重意義、不確定性的意思。模糊理論於1965年由美國加州大學柏克 萊分校L.A. Zadeh教授所提出,探討人類主觀或思考過程中定量化處 理的解決方法。模糊理論依照大概的資訊對人類主觀表現的概念作大 略的定量化處理,它能把決策模式植入機器的執行過程,使機器不再 依賴數學模型的推導,並且包含專家知識的語言控制策略,解決一些 自然界無法量化建立模型的模糊現象。 2.1.1 模糊邏輯規畫 模糊邏輯控制提供一種演算法則,可將包含專家知識的語言控制 策略,轉換成自動控制策略,可用於表現一些無法明確定義的模糊性 概念,尤其是人類語言特有的模糊現象。因此模糊邏輯控制是一種易 於控制、容易掌握的非線性控制器,有不錯的適應性及強健性。 分心是一種模糊性(fuzziness)的生理現象,並無法客觀而量化 的表現出來,且每個人的感受各有不同。因此我們使用模糊邏輯來使測系統,加以推論並決定危險行車時分心造成的危險程度。
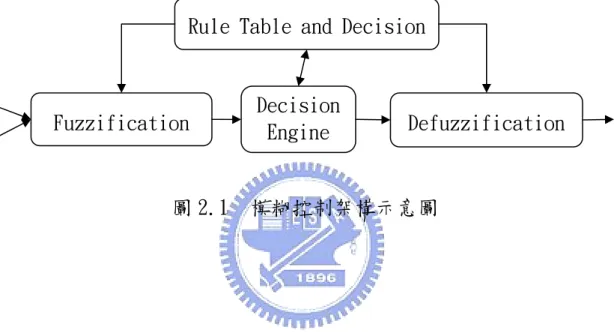
本系統的模糊控制三個主要結構為模糊化(Fuzzification)、 規則表與推論( Rule Table and Decision )、解模糊化
(Defuzzification),整個系統架構如圖2.1所示。
圖 2.1 模糊控制架構示意圖 Rule Table and Decision
Decision Engine
2.2 模糊系統的流程 2.2.1 模糊化 模糊化是經由一組對應的歸屬函數,將輸入值轉換為0到1之間 的歸屬值的動作。歸屬值愈大,表示對於該項描述的吻合強度愈大, 相反地,歸屬值愈小,表示對於該項描述的吻合強度愈小。圖 2.2 為 歸屬函數的示意圖。 圖 2.2 歸屬函數示意圖 Heart Rate ( beats/minute ) Membersh ip N um be r
μ
HR Lb L1 M1 L2 M2 H1 M3 H2 Hb Membersh ip N um be rμ
RT Response Time ( second ) Fast Normal SlowLb L1 M1 L2 M2 H1 M3 H2 Hb
於本研究中,我們對於每一個輸入值皆設定三種模糊描述,對於 感知反應時間的描述分別為「反應快」、「反應中」與「反應慢」三 項,對於心跳率的描述分別為「心跳慢」、「心跳中」及「心跳快」 三項。在歸屬函數的選用上,我們選擇三角形歸屬函數與梯形歸屬函 數,並且規定其調整參數的代號。以感知反應時間之歸屬函數為例, 在「反應快」描述的歸屬函數,我們可調整之值為 Lb、L1和 L2;在「反 應中」描述的歸屬函數,我們可調整之值為 M1、M2和 M3;在「反應慢」 描述的歸屬函數,我們可調整之值為 H1、H2和 Hb。較特別的是,如果 經由調整後,Lb=L1或者是 H2=Hb,其梯形歸屬函數將被調整成三角 形歸屬函數。 圖 2.3 模糊化示意圖 由圖 2.3 的模糊化示意圖為例,對歸屬函數組輸入一輸入值 x, 經由「反應快」的歸屬函數計算出 x 值對於「反應快」描述的歸屬度 Response Time ( second ) Membersh ip N um be r
μ
RT Lb L1 M1 L2 M2 H1 M3 H2 HbFast Normal Slow
μL
μM
為μL,而對於「反應中」描述的歸屬度為μM,對於「反應慢」描述 的歸屬度則為μH=0。從圖例中看出(μL)>(μM)>(μH)=0, 表示對於 x 值應有的描述,較接近「反應快」。 輸入的數值經由模糊化的動作得到範圍在0至1之間的歸屬度, 並且根據模糊規則表與推論,進行解模糊化。表 2.1 為本研究的安全 評估系統中,模糊主系統的三個歸屬函數之參數設定值。 表 2.1 安全評估主系統之歸屬函數設定值表格 歸屬函數組 歸屬函數A (梯形) 歸屬函數B (三角形) 歸屬函數C (梯形) 歸屬函數參數 Lb L1 L2 M1 M2 M3 H1 H2 Hb 輸 入 反應時間 0 1.5 2.2 2.0 2.5 3.0 2.7 3.2 5.0 心跳率 20 40 60 50 70 100 92 110 140 輸 出 安全程度 0 0 0.4 0.15 0.5 0.7 0.6 1 1 2.2.2 模糊規則表與推論 對於一個已知輸入項目和輸出項目的模糊系統,我們還需要一個 方式將兩者做關聯性的連結,也就是可依專家或個人的知識與經驗製 訂的模糊規則表,一般來說,模糊規則表的控制規則多以「If…, then…」的陳述法來表示,再來進行模糊推論。 以下表 2.2 為安全評估系統所使用的模糊規則表:
根據模糊規則表,本研究使用之模糊推論法為「最大-最小合成法」, 經由推論後的結論為模糊集合,再來我們將之解模糊化。 以安全評估系統之模糊規則表為例,以下,圖 2.4 為「最大-最 小合成法」的模糊推論示意圖。 表 2.2 安全評估系統之模糊規則表 反應 時間 心跳率 快 中 慢 慢 安全 注意 危險 中 安全 注意 危險 快 安全 危險 危險 輸入:反應時間、心跳率 輸出:安全評估值
圖 2.4 「最大-最小合成法」之模糊推論示意圖 Decision Engine Normal Normal Normal Slow Normal Fast x y Warning Warning Danger MAX MIN MIN MIN
2.2.3 解模糊化
經過模糊推論後,我們得到一個新的模糊集合,為了求取我們的 目標數值,必須進行解模糊化的動作。
解模糊化的方法有許多,如果推論後得到的是模糊集合,常用的 有重心法(Center of Gravity Defuzzifier)、最大平均法(Mean of Maxima defuzzifier)、中心平均法(Modified Center Average Defuzzifier);若推論後得到的是明確的輸出值,權重式平均法 (Weighted Average Method)最被廣泛使用。於本研究中,我們選 用重心法做為解模糊化的方法。重心法是求推論結果面積的重心,並 以其對應的元素為輸出的控制量,其公式如下: CG ∑ ∑ CG :模糊控制器輸出量 k :觸動規則數 Yi :第i個控制規則歸屬度 Bi :第i個控制規則歸屬函數重心值 經由解模糊化後我們可以得到輸出的控制量,也就是本研究中的 安全評估值。
2.3 類神經網路介紹 2.3.1 類神經網路簡介 類神經網路是一種模仿生物神經網路的資訊計算系統,它使用了 大量且簡單的相連人工神經元,就如同生物的神經元,進而模仿生物 神經網路的能力。人工神經元是生物神經元的簡單模擬,它從外界環 境或者其它人工神後元取得資訊,並加以簡單的運算,並輸出其結果 到外界環境或者其他人工神經元。 圖 2.5 類神經元示意圖 類神經網路的模式根據其網路學習的演算方式,大致分為監督式 學習網路(Supervised learning network)、無監督式學習網路 (Unsupervised learning network)、聯想式學習網路(Associate learning network)以及最佳化應用網路(Optimization application network)四大類。
於監督式學習網路中,必須給定訓練樣本,根據所選用的學習演 算法則對網路加以訓練,調整該網路內相關的權值,使得所有與輸入 的訓練樣本相對應的網路輸出值符合預先期望的設定值。代表性的網 路模式如感知機(Perceptron),霍普菲爾網路(Hopfield neural network,HNN)以及應用較為普遍的倒傳遞網路(Back-propagation network,BPN)等等。非監督式學習網路則不需事先指明有哪些群集, 或者是群集內包含的樣本,利用自我組織(Self-Organizing)的方 式修改網路權值,將相似的輸入向量分配至相同的輸出單元,同時, 每一個形成的群集將產生自己的代表向量。代表性的網路模式如自組 織映射圖網路(Self-Organizing Map,SOM)與自適應共振理論網路 (Adaptive Resonance Theory Network,ART)。
本研究使用類神經網路調整安全評估系統中歸屬函數的參數,在 正常且無分心的行車表現上,我們預設系統輸出的安全評估值為良好, 因此我們採用監督式網路中較普遍被應用的倒傳遞網路 (Back-propagation network,BPN),於正常狀況的行車表現得到之 實驗數據作為訓練樣本,完成訓練後,該網路對實車實驗結果計算出 的預測值與實際實驗值相減可得到誤差值,再依據誤差程度的大小決 定對系統的調整程度。
2.3.2 倒傳遞類神經網路原理
倒傳遞類神經網路運用最陡坡降法(The Steepest Descent Method)來學習,藉由多次地調整節點之間的權重值與偏權值,使得 輸出值與目標值的誤差達到最小化,以完成該網路的訓練。倒傳遞網 路的訓練過程包括三個階段:(1)將訓練樣本以前饋(Feedforward) 方式輸入網路,(2)以反饋(Backforward)的方式計算相關誤差及權值 的調整量,(3)調整權重值與偏權值。以下為一簡易單一隱藏層之倒 傳遞類神經網路(圖 2.6)架構。 圖 2.6 單一隱藏層之倒傳遞類神經網路架構 Output Layer Hidden Layer Input Layer
第三章 實驗的前置作業與內容
為了順利進行本研究的實驗,我們必須完成數項前置作業,包括 了如何量測心跳率、如何取得行車之中的反應時間數值、建構安全評 估系統等等,以下將一一詳述。 3.1 量測心跳率 心跳率量測的部分,本研究使用心跳量測錶量測心跳率,關於心 跳量測錶的介紹與使用方法,於章節 3.4.1 詳述。 3.2 量測反應時間與記錄心跳率之介面 於測量反應時間與上,我們採用 LabVIEW 的人機介面,撰寫程式 以測量駕駛者於駕駛中的反應時間。 3.2.1 LabVIEW 簡介LabVIEW (Laboratory Virtual Instrument Engineering Workbench)是美國National Instruments 公司於1986 年所發展出 來,以虛擬儀表操控為訴求的應用軟體工具,可利用圖形介面代替傳 統文字介面,並內建許多副程式及儀器的驅動程式,以物件導向和流 程圖觀念構圖並透過DAQ卡做人機介面溝通。使用LabVIEW 的電腦比 一般標準的設備更有較高的使用特性,可輕易地建立自己的LabVIEW
的程式,稱之為虛擬儀表(virtual instruments),簡稱VI,因為其 所設計出來的程式在外觀以及操控上都與真實的儀器相似。其程式編 輯和一般的程式語言,如C或BASIC程式語言,有很大的差異性。 LabVIEW 跳脫傳統的程式設計環境進入到容易使用的圖形化程式 作業環境,包括資料擷取、資料分析與結果呈現等所有必須使用的工 具。藉由圖形化程式設計語言(稱之為G語言)的協助,將程式方塊 圖編譯成機械碼。傳統的程式語言上所爭辯的許多問題,LabVIEW 都可以在短時間內解決,呈現多數科學與工程運用上的想法。 3.2.2 程式設計三部分 1.人機介面(Front Panel): 是一個使用者與VI的介面,如此命名是由於它能模擬真正儀器的 人機介面。人機介面包含旋鈕(knobs),按鈕(Push button),圖形 (graphs),與許多的控制元(controls,屬於使用者輸入),及顯示元 (indications,屬於使用者輸出)。使用鍵盤與滑鼠來輸入便可在螢 幕看到程式執行的結果。以下,圖3.1為本研究所撰寫的LabVIEW程式 的人機介面:
圖 3.1 LabVIEW 人機介面 2.程式方塊圖(Block Diagram): 程式方塊圖是 VI 的原始程式碼,由 LabVIEW 的圖形語言 G 語 言所建立。程式方塊圖是真正可執行的程式。方塊圖包含較低階的 VI、內建函數、常數與程式執行的控制結構。只需要畫接線(wire) 將合適的物件連結在一起,來指出它們之間的資料流動。人機介面在 方塊圖中具有對應的接點(terminal),因此資料可以經由使用者傳至 程式中再傳回使用者。 針對本研究,我們的需求如下列數項: 1. 設計一個簡單的加法問題,可提供受試者輸入訊號,以求 得當下的反應時間值之介面。
2. 可以將受試者每次的反應時間值儲存至檔案中。 3. 可以將受試者的應答與標準答案之記錄儲存至檔案中,用 於觀察受試者是否因分心而使得答題的正確率下降。 4. 於實驗過程中,讀取心跳量測錶的心跳率數值後可以即時 輸入心跳率,儲存至檔案中。 根據上述四項的需求,我們撰寫合用的 LabVIEW 程式,其程式之 Block Diagram 如下圖 3.2 所示:
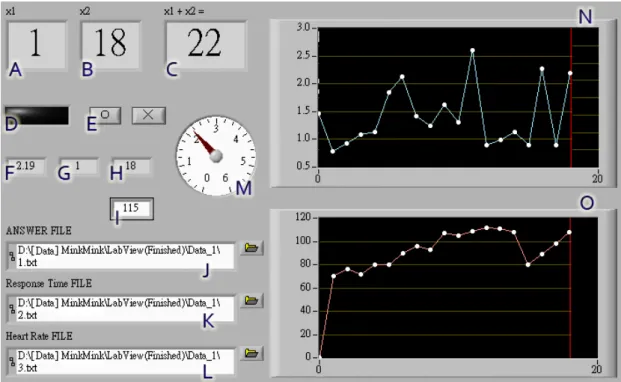
3.2.3 介面程式運作說明 參照 Joanne 的研究[11]為架構,我們建立心算模式,於圖 3.3 的人機介面之中顯示,表 3.1 為人機介面功能解說表。此模式為單一 加法運算,A 與 B 分別代表兩個0至20的隨機正整數相加,C 則表 示 A 加 B 之和。 程式開始須先按 Start 鍵,接著倒數計時器 G 會從 10 秒開始倒 數,代表實驗將在多少秒後開始。當倒數器倒數到零時,開始作答指 示燈 D 亮起綠燈,反應時間計時器 M 開始跟著動作開始計時;此時 A 和 B 也同時顯示出隨機選出的數值。但加法總和 C 所顯示的加法答案 並非全部都為正確答案,本研究將之正確或錯誤的機率設定為各半, 藉此增加受試者的實驗難度,讓反應出的時間更貼近突發狀況。 接著受試者必須在時間內判斷出答案正確與否,按下 E 處的“○" 鈕或“╳"鈕。按下 E 處的按鈕後,F 處顯示本次反應時間值,G 處 重新啟動倒數計時器,H 處的已測次數加1,N 處繪入本次反應時間 值,O 處則是繪入 I 處所輸入的心跳率。J 處為問答的正確答案和受 試者應答答案的儲存檔案路徑,K 處為每次反應時間值的儲存檔案路 徑,L 處為每次心跳率數值的儲存檔案路徑。
圖 3.3 LabVIEW 程式進行圖 表 3.1 LabVIEW 人機介面功能解說表 代號 顯示功能 A 範圍為0至20之隨機正整數 B 範圍為0至20之隨機正整數 C A 加 B 之和,正確與錯誤之機率各半 D 開始作答指示燈 E 正確或錯誤輸入按鈕 F 該次之反應時間值 G 倒數計時器 H 已測次數 I 心跳率輸入視窗 J 正確答案與受試者應答答案儲存檔案路徑 K 反應時間儲存檔案路徑 L 心跳率儲存檔案路徑 M 反應時間計時器 N 實驗次數(x 軸)與反應時間(y 軸)關係圖 O 實驗次數(x 軸)與心跳率(y 軸)關係圖
3.3 安全評估系統
3.3.1 結合模糊邏輯控制與類神經網路的評估系統
由於類神經網路具有良好的學習能力,且模糊控制可包含專家知 識,以語言控制的形式協助控制系統,目前已有許多結合類神經網路 與模糊理論的控制方法,如適應性網路架構模糊推論系統(Adaptive Network-based Fuzzy Inference System,ANFIS)、模糊適應性學習 控制網路(Fuzzy Adaptive Learning Control network,FALCON)、 倒傳遞模糊系統(Back-propagation fuzzy system)、模糊化多維矩 形複合式類神經網路(Fuzzy Hyper Rectangular Composite Neural Network,FHRCNN)等。 本研究為了修正安全評估主系統中的歸屬函數的圖形參數,採用 以下兩種方法:一、設計個人能力的自我評鑑問卷以供受試者填答, 將所得到的問卷分數經由一個專為問卷設計的模糊邏輯子系統做分 析,得到相對應的調整值,對主系統中歸屬函數圖形的 L1與 H2參數 加以調整;二、使用倒傳遞類神經網路,藉其學習能力,針對駕駛者 在正常行車狀況下的反應時間之數據進行學習,建構起個人化的類神 經網路後,再將此網路用於計算加入分心因素的行車實驗數據,計算 求得平均之誤差值,用以調整主系統裡的安全程度歸屬函數中 M2、M3、
H1、H2的參數值。系統執行流程如下: (1)匯入自我能力評估分析所得到的調整程度結果,對主系 統歸屬函數之 L1、H2值加以調整完畢。 (2)令受試之駕駛者於正常狀況下行駛,並且擷取實驗數值, 用以訓練倒傳遞類神經網路(BPN)學習至滿足收斂條 件後,得到對主系統安全程度歸屬函數之 M2、M3、H1、 H2的調整值,然後調整完畢。此安全評估系統建立完 成。 (3)於實驗的環境中導入所設計的分心情境,實車實驗獲得 數值後,使用已建立完成的安全評估系統分析數據,然 後觀察結果與討論。 以下,圖 3.4 為本研究之安全評估系統流程示意圖:
圖 3.4 安全評估系統流程示意圖
本系統程式使用 Bloodshed Software 所開發之 Dev-C++撰寫。
3.3.2 自我能力評估問卷與問卷子系統 於本研究中,為了減低受試駕駛者之間因年齡落差過大,在體能 差距上對實驗造成的誤差影響,我們將受試的駕駛者年齡限制在18 至38歲之間,並且不以年齡為參考,而使用駕駛者之駕駛年資為參 考依據。駕駛者在接受實車實驗之前,必須先填答簡單的問卷內容, 以供問卷子系統用來調整主系統的部分參數。問卷內容如下:
Fuzzy Rule Table
Ev
alua
tion Data Fuzzification Decision Engine Defuzzification
Fuzzy Logic Main System
BPN Sub System Sa fe ty E va lu at ion Number Fuzzy Logic Decision Questionnaire Sub System Ques tionnair e Data Training Da ta
表 3.2 問卷內容表 問卷選項所相對應的輸入值對照表如下: 表 3.3 問卷各選項與相對應輸入值對照表 緊張程度 非常容易 很容易 容易 有點容易 普通 有點不會 不太會 幾乎不會 完全不會 輸入值 1.00 0.88 0.75 0.62 0.50 0.38 0.26 0.12 0.00 反應速度 非常慢 很慢 慢 微慢 普通 微快 快 很快 非常快 輸入值 1.00 0.88 0.75 0.62 0.50 0.38 0.26 0.12 0.00 於問卷子系統中,我們必須設定五組歸屬函數,分別為「自評反 應能力」、「自評緊張程度」、「駕駛年資」、「反應時間調整值」和「心 跳率調整值」,以下表 3.4、表 3.5 為四組歸屬函數與描述的對應表 及歸屬函數的設定值: 您的年齡 : 歲 您的駕駛年資: 年 您認為自己是個容易緊張的人嗎? □非常容易 □很容易 □容易 □有點容易 □普通 □有點不會 □不太會 □幾乎不會 □完全不會 若於行車之中遭遇突發事件,您自認自己的反應速度是? □非常慢 □很慢 □慢 □微慢 □普通 □微快 □快 □很快 □非常快
表 3.4 歸屬函數與描述項目對應表 歸屬函數組 歸屬函數A (梯形) 歸屬函數B (三角形) 歸屬函數C (梯形) 輸 入 自評反應能力 快 中 慢 自評緊張程度 不易緊張 一般 容易緊張 駕駛年資 新手 普通 老手 輸 出 反應時間調整值 L1與H2向左調整 L1與H2不調整 L1與H2向右調整 心跳率調整值 L1與H2向左調整 L1與H2不調整 L1與H2向右調整 表 3.5 問卷子系統之歸屬函數設定值表格 歸屬函數組 歸屬函數A (梯形) 歸屬函數B (三角形) 歸屬函數C (梯形) 歸屬函數參數 Lb L1 L2 M1 M2 M3 H1 H2 Hb 輸 入 自評反應能力 0.0 0.0 0.5 0.0 0.5 1.0 0.5 1.0 1.0 自評緊張程度 0.0 0.0 0.5 0.0 0.5 1.0 0.5 1.0 1.0 駕駛年資 0 1 5 3 10 15 13 20 20 輸 出 反應時間調整值 -0.30 -0.30 -0.10 -0.15 0 +0.15 +0.10 +0.30 +0.30 心跳率調整值 -10 -10 0 -7 0 +7 0 +10 +10 圖 3.5 問卷子系統用以調整主系統歸屬函數的方法示意圖 Response Time ( second ) Lb L1 M1 L2 M2 H1 M3 H2 Hb
問卷子系統的模糊規則表設定如下表: 3.3.3 倒傳遞類神經網路子系統 倒傳遞類神經網路子系統(以下簡稱 BPN 子系統)是我們為了用 於調整主系統安全程度之歸屬函數參數的子系統。在倒傳遞類神經網 路的設計上,我們採用具有三層的類神經結構,分別為輸入層、中間 層與輸出層。輸入層設定為 40 個單元,中間層設定為 10 個單元,而 輸出層則為 1 個單元。 數據的採集,我們採集反應時間的數據用來訓練類神經網路。在 數據採集頻率上,將之設定為每 10 秒採集 1 次。於正常的行車狀況 下,我們採集 250 次作為類神經網路所需的訓練樣本數;在加入分心 因素後,針對每種分心因素,各採集 50 次數據,用來計算與已建立 完成的類神經網路所預測數值之平均誤差值,進一步對主系統作相對 表 3.6 問卷子系統之模糊規則表(1) 反應 能力 駕駛年資 快 中 慢 新手 不調整 不調整 不調整 普通 往左調 不調整 往右調 老手 往左調 不調整 往右調 輸入:自評反應能力、駕駛年齡 輸出:反應時間歸屬函數調整程度 表 3.7 問卷子系統之模糊規則表(2) 緊張 程度 駕駛年資 不易 一般 容易 新手 往左調 不調整 往右調 普通 往左調 不調整 往右調 老手 往左調 不調整 往右調 輸入:自評緊張程度、駕駛年齡 輸出:心跳率歸屬函數調整程度
應的調整。 我們預期訓練完成的個人化類神經網路,有一定程度的可信度可 用來代表駕駛者本人於正常行車中的反應時間預測模型。若駕駛者因 為分心因素而產生分心現象,其反映在反應時間上的數值將會和類神 經網路所預測之數值產生誤差。我們認為,如果駕駛者已產生分心, 對於安全程度的評估就必須變得較為保守,由原本主系統評估為安全 的情形,可能不再安全。因此,如果產生誤差,我們計對主系統中安 全程度歸屬函數的參數 M2、M3、H1、H2乘上一個調整值α,讓調整後 的主系統所評估出的安全程度會比未改變參數之前的主系統所評估 的來得較低。調整值的公式與經過調整後的歸屬函數圖形示意圖如下, 圖 3.6: α 1 0.05 E wBPN 1000 Safety Evaluation Number
Danger Warning Safe
M1 αM2 αH1. .αM3 αH2 Membersh ip N um be r
μ
S其中 Emean為分心因素下所作的 50 次實驗值的平均誤差值,wBPN則是子
系統對於主系統的參與權重值,稱為啟動權重值,範圍為 0 到 1,0 為關閉子系統,不參與主系統參數之調整,1 則是完全參與。數值愈 大,平均誤差值對主系統參數調整的變動愈大。於本研究中我們將 wBPN設定為 0.5。
3.4 實驗裝置、器材與實驗規畫 3.4.1 實驗裝置與器材 z 實驗用車:Peugeot 406 SV D8 2.0L 圖 3.7 實驗用車,Peugeot 406 SV D8 2.0L 表 3.8 實驗用車規格表 車身尺寸(L(mm)/W(mm)/H(mm)) 4555 / 1764 / 1396 引擎型式 XU10 J4R / 16V 馬力(Power / rpm) 132 PS(130hp/97kW) / 5500 扭力(Torque / rpm) 180 N.m(133 lb.ft) / 4200 軸距(mm) 2700
z 實驗用電腦 本實驗使用華碩的筆記型電腦 EeePC 作為 LabVIEW 操作的硬體平 台,架設在駕駛者右手邊中控台的上方,如圖 3.8 所示。 圖 3.8 EeePC 架設圖 z 實驗用答案輸入無線裝置與固定架 在量測反應時間時,為了減少手部移動到按鈕的距離對反應時間 量測造成不必要的誤差,本研究使用無線雷射滑鼠作為輸入答案的裝 置,將滑鼠左鍵設定為“○"鈕,右鍵設定為“╳"鈕,並且加裝汽 車專用的吸盤式手機固定支架,將無線滑鼠固定在駕駛座車窗附近, 以利駕駛者即時作答。本研究採用羅技(Logitech)公司所生產的雷 射無線滑鼠,型號為 V550 Nano,如圖 3.9。
圖 3.9 答案輸入無線裝置架設圖 z USB 獨立數字鍵盤 用於即時輸入心跳率數值,由於其為獨立的外接 USB 裝置,工作 人員只要在手邊使用此裝置輸入數字,不必使用筆記型電腦上的鍵盤 做數字輸入,除去在實驗進行當中操作筆記型電腦對受測者造成的視 線干擾。本研究使用 LEXMA 所生產的 USB 數字鍵盤,型號為 KP100。
z 心跳量測錶
採用心跳量測錶(廠牌為 Fitek Heart Rate Monitor,型號為 HRM-9803-V3,如圖 3.11 所示),用於量測駕駛者正常情況下與每一 次測試時的心跳率。使用方式為將黑色環形量測器綁在胸前,利用紅 外線的無線傳輸功能將心跳率即時傳至手錶的接收器上,隨後錶上即 顯示出當下每分鐘的心跳數。 圖 3.11 心跳量測錶 3.4.2 實驗規畫 本實驗將實驗場地設定為國立交通大學校內之環校道路,全長約 2.2 公里,為一近似長方形的寬敞雙線道路。為了減少行人過多對實 驗造成干擾,白天的實驗時間定為上午 6 時 30 分,分心因素為夜間
行駛的實驗,其實驗時間則定為晚間 10 時 30 分。 由於倒傳遞類神經網路子系統的訓練樣本需以每 10 秒採集 1 次, 總共採集 250 次的方式收集,在訓練樣本採集上,每次約需 1 小時左 右的實車實驗;而在分心因素加入的實驗中需要採集 50 次數據,估 計單一個分心因素所作的實驗,約耗時 12 分鐘左右。 關於分心因素的設定,本實驗將之定義如下表: 表 3.9 分心因素之定義與描述 分心因素名稱 定義與描述說明 無分心因素 於睡眠充足且不感到疲勞的狀況下進行車輛駕駛。 夜間駕駛 駕駛者於夜間進行車輛駕駛。 疲勞駕駛 駕駛者 24 小時沒有睡覺(註一)。 夜間疲勞駕駛 駕駛者 24 小時沒有睡覺,且於夜間進行車輛駕駛。 (註一):疲勞駕駛普遍定義為長時間駕駛而產生的疲 憊,但因實驗進行不易,本研究將疲勞駕駛 的方式改為長時間不休息(或睡眠)而導致 的身體疲憊。 於研究對象上,本實驗挑選 5 位擁有小客車駕駛執照之男性駕駛, 並將受試的駕駛者年齡範圍設定在18至38歲之間。 3.4.3 實驗步驟 1. 於實驗開始之前,受試者須填寫自我評量問卷,問卷填寫完畢後,
將問卷填答內容引入問卷子系統,對安全評估主系統作適當的調 整,詳情如章節 3.3.2 所述。 2. 建立 BPN 子系統,受試者接受第一階段的實車實驗,在精神狀況 良好且無分心因素的影響、天氣晴朗且日照及能見度佳的氣候進 行實車實驗,擷取 250 次反應時間之數據。(第一階段實驗訂於 上午 6 時 30 分進行) 3. 加入分心因素,受試者接受第二階段的實車實驗。本研究列舉之 分心因素分別為「夜間駕駛」、「疲勞駕駛」以及「夜間疲勞駕駛」, 包含「無分心因素」之實驗共四項(註二),每項實驗根據表 x.x 之 定義進行實驗。須於夜間駕駛之實驗項目訂於下午 10 時 30 分進 行,其餘項目則於上午 6 時 30 分進行。每項實驗皆須擷取 50 次 反應時間的數據與 50 次心跳率的數據,取其平均值,作為安全 評估系統的輸入值。 4. 在第二階段的實車實驗中,於受試者回答 LabVIEW 人機介面上之 加法問題後,副駕駛座的工作人員即時使用 LabVIEW 上的人機介 面記錄當時的心跳率。 (註二)由於「飲酒駕駛」與「使用非免持裝置之手機」等分心因素已被 法律明文禁止,具有極高程度的危險性,因此不在本研究討論範 圍內。
第四章 實驗結果與討論
本研究所須進行的實車實驗全數進行完畢後,我們將實驗所得的 數據經由完整的安全評估系統(啟用 BPN 子系統,啟用權重值為 0.5) 和關閉 BPN 子系統(BPN 子系統的啟用權重值為 0)的安全評估系統 加以分析,所得之實驗結果列表整理如表 4.1 所示。 表 4.1 實驗結果的安全評估值表格 BPN 子系統啟用 與否 無分心 夜間 疲勞 夜間疲勞 受試者 A 啟用 0.818 0.774 0.389 0.355 關閉 0.850 0.829 0.435 0.433 受試者 B 啟用 0.801 0.801 0.499 0.355 關閉 0.826 0.824 0.544 0.439 受試者 C 啟用 0.820 0.557 0.367 0.332 關閉 0.860 0.582 0.432 0.433 受試者 D 啟用 0.806 0.786 0.669 0.402 關閉 0.842 0.821 0.749 0.445 受試者 E 啟用 0.803 0.811 0.383 0.385 關閉 0.827 0.835 0.442 0.443於完整的安全評估系統(BPN 子系統啟用)的資料分析方面,將 五位受試者的安全評估值作圖比較,如圖 4.1 所示: 圖 4.1 安全程度評估值與分心因素關係圖 於圖 4.1 可見,分心因素裡的疲勞駕駛對安全程度的影響較大, 受測者在「疲勞」以及「夜間疲勞」的項目所得到的安全程度評估值 較低,相較於「無分心」與「夜間」,有明顯下滑的趨勢。 若以「無分心」與「夜間」為一組觀察比較,發現在精神良好的 情況下對實驗項目增添「夜間」的因素,對安全評估值的影響並不顯 著;但若以「疲勞」與「夜間疲勞」為一組觀察比較,則發現增添「夜 間」因素較容易使受測者的安全評估值降低。唯有受試者 E 的安全評 0.300 0.400 0.500 0.600 0.700 0.800 0.900 Driving in the morning Driving at night Drowsy driving in the morning Drowsy driving at night Safety Evaluation Number Driver A Driver B Driver C Driver D Driver E
估值上升了 0.002,討論其原因,此兩項分心因素對於受試者 E 的受 測結果,其安全評估值都低於 0.400,皆已處在危及安全的危險情況, 受試者 E 在此兩項分心因素下的分心程度相近,因此安全評估值相近, 亦可能發生「夜間疲勞」安全評估值比「疲勞」安全評估值多 0.002 的情況。 為了觀察 BPN 子系統對於安全評估主系統的影響,我們將每位受 試者在啟用 BPN 子系統與關閉 BPN 子系統的狀況下所得到的安全評估 值,分別繪圖比較,圖 4.2 所示。由圖可知,BPN 子系統啟用的數值 折線皆處於 BPN 子系統關閉的數值折線之下,表示 BPN 子系統的啟用 對安全評估主系統的評估結果在安全上做了較為保守的修正。
圖 4.2 BPN 子系統啟動與否比較圖 0.300 0.400 0.500 0.600 0.700 0.800 0.900 Driving in the morning Driving at night Drowsy driving in the morning Drowsy driving at night Driver A BPN active (w = 0.5) BPN inactive (w = 0.0) 0.300 0.400 0.500 0.600 0.700 0.800 0.900 Driving in the morning Driving at night Drowsy driving in the morning Drowsy driving at night Driver B BPN active (w = 0.5) BPN inactive (w = 0.0) 0.300 0.400 0.500 0.600 0.700 0.800 0.900 Driving in the morning Driving at night Drowsy driving in the morning Drowsy driving at night Driver C BPN active (w = 0.5) BPN inactive (w = 0.0) 0.300 0.400 0.500 0.600 0.700 0.800 0.900 Driving in the morning Driving at night Drowsy driving in the morning Drowsy driving at night Driver D BPN active (w = 0.5) BPN inactive (w = 0.0) 0.300 0.400 0.500 0.600 0.700 0.800 0.900 Driving in the morning Driving at night Drowsy driving in the morning Drowsy driving at night Driver E BPN active (w = 0.5) BPN inactive (w = 0.0)
於「疲勞」與「夜間疲勞」的項目上,受試者 A 與受試者 C 在 BPN 子系統關閉時所得到的安全評估值皆十分接近,但在 BPN 子系統 啟動時,「夜間疲勞」所得到的安全評估值明顯比「疲勞」所得到的 安全評估值來得較低,表示從 BPN 子系統的運算結果可以得知,受試 者在「夜間疲勞」實驗項目的表現和由第一階段實車實驗的訓練樣本 所建立的反應時間預測模型預測的結果差異較大,得到較大的誤差值, 因此對安全評估值做出較大的修正,使得「夜間疲勞」項目的安全評 估值比「疲勞」項目的安全評估值還低。 較值得注意的是前文曾提到的受試者 E 於「疲勞」與「夜間疲勞」 兩個實驗項目上,經由 BPN 子系統啟動所得到的安全評估值之差值與 BPN 子系統關閉所得到的安全評估值之差值,分別為 0.002 與 0.001, 可知受試者 E 在兩個實驗項目的實驗數值與 BPN 子系統的反應時間預 測模型預測的結果差異程度相近,更能顯現此兩項分心因素對於受試 者 E 造成的分心程度十分相近。
第五章 結論與檢討
5.1 結論 本研究的安全評估系統包含了模糊邏輯控制與類神經網路學習 系統,前者經由模糊理論將安全程度數值化,使得安全程度有了限定 的數值範圍可被客觀討論與比較;後者則藉由倒傳遞類神經網路對受 試者的反應時間數值加以學習,建立起可供參考的個人化反應時間預 測模型,用以檢查受試者是否有明顯的反常表現,並對安全評估主系 統加以調整,使之輸出更客觀可信的安全評估值。 本研究使用模糊邏輯作為主系統的架構,並且使用問卷子系統和 BPN 子系統,依照每位受試者對自我能力的認知與各自獨特的生理表 現調整主系統內部歸屬函數的參數,使安全評估系統能夠更貼切地表 達每位受試者在受試當中受分心因素所影響的分心程度之大小。實驗 結果之數據更清楚表示,安全評估系統成功分析出受試者在疲勞駕駛 及夜間疲勞駕駛的分心因素下行車,所得到的安全評估值較低,也就 是具有較高危險性的意思,與一般社會大眾普遍認為疲勞駕駛易造成 意外事故之概念不謀而合。BPN 子系統也清楚地將「疲勞」與加入夜 間因素的「夜間疲勞」兩項分心因素對受試者的影響加以判斷,得知 同樣處於疲勞的狀況下,若於夜間行車,可能具有更大的危險性。單單只使用模糊邏輯作為安全評估系統,有時可能因模糊演算的 方式造成對實際情勢的誤判而高估安全程度,此時 BPN 子系統可以經 由觀察駕駛者於表現上的反常程度做調整,有效降低誤判所造成的誤 差,避免過分錯估安全程度之情事發生。 5.2 檢討與建議 1. 本研究在量測反應時間上,受試者必須回答簡單的加法問題, 並且於行駛中使用無線輸入裝置點選答案。若將此安全評估 系統實際用於實際行駛中,可能增加當下的分心程度,提高 行車的危險性。若單只應用於疲勞駕駛的分心評估,可以考 慮採用 Eriksson 等人[6]所提出,藉由偵測瞳孔的活動來分 析駕駛人是否疲勞的方法來替代擷取反應時間的作法。 2. 本研究的第二階段實驗為擷取反應時間與心跳率各 50 次, 並取其平均值,用以輸入安全評估系統。由於擷取數據的頻 率約為 10 秒 1 次,若未包含受測者的反應時間,完成 50 次 數據擷取至少也需要 8 分 20 秒,若欲將本評估系統應用於 實際行車,可能會遺漏掉潛藏在這段時間內不安全的時段。 可行的辦法為減少數據擷取的總次數,如 20 次一組或是 10
實驗檢查安全評估系統是否仍具可信度,減少本研究安全評 估系統於時間長度上的評估死角,讓系統更具實用價值。 3. 由於量測器材受限以及部分的量測器材於實車上的裝設較 具難度,本研究考慮的駕駛人表現參數較少,如果能夠考慮 駕駛者於煞車踏板的踩踏力度與深度、方向盤轉動的角速度 等等其它變數,應可使分心程度的判別更為精確。
參考文獻
[1] Y. Ian Noy, “Human Factors Issues Related to Driver Distraction From In‐Vehicle System,” Ergonomics Division Road Safety and Motor Vehicle Regulation Directorate Transport Canada. [2] Goodman, M., “NHTSA Driver Distraction Research: Past, Present, and Future,” NHTSA Research and Development, Washington, DC., 2000. [3] S. L. Chisholm, J. K. Caird, J. Lockhart,“The effects of practice with MP3 players on driving performance,” Accident Analysis and Prevention, September 2007. [4] Katherine E. Heck, Ramona M. Carlos, “Passenger distractions among adolescent drivers,” Journal of Safety Research, August 2008. [5] Thomy Nilsson, Thomas M. Nelson, Dona Carlson, “Development of fatiguesymptoms during simulated driving,” Accident Analysis and Prevention, 1997. [6] Martin Eriksson, Nikolaos P. Papanikolopoulos, “Driver fatigue:a vision‐basedapproach to automatic diagnosis,” Transportation Research Part C, 2001. [7] Ivan D. Brown, “Prospects for technological countermeasures[8] Sarah Otmani, Thierry Pebayle, Joceline Roge, Alain Muzet, “Effect of drivingduration and partial sleep deprivation on subsequent alertness and performance of car drivers,” Physiology & Behavior, 2005. [9] J. Fukuda, E. Akutsu and K. Aoki, “An estimation of driver’s drowsiness level using keeping,” JSAE, 1995. [10] Zengyong Li., Kun Jiao, Ming Chen, Chengtao Wang, “Reducing the effects of driving fatigue with magnitopuncture stimulation,” Accident Analysis and Prevention, 2004. [11] Joanne, L. H. et al., “The impact of internal distraction on driver visual behavior.” [12] Michael E. Rakauskas, Nicholas J. Ward, Erwin R. Boer, Edward M. Bernat, Meredith Cadwallader, Christopher J. Patrick, “Combined effects of alcohol and distraction on driving performance,” Accident Analysis and Prevention, June 2008. [14] 林志榮,“結合隱藏式馬可夫模型與類神經網路之國語語音辨 識",國立中央大學電機工程學系碩士論文,2000 年。 [15] 邱偉源,“以模糊法評估分心因素對行車安全之影響",國立 交通大學機械工程學系碩士論文,2008 年。

![表 1.1 年輕乘客對年輕駕駛的影響 [4] 於疲勞分心的探討,當駕駛人產生駕駛疲勞現象時,常見的徵狀 為眼皮沉重、想睡覺或者是打瞌睡。Nilsson 等人的研究[5]使用駕 駛模擬器為實驗平台,配合生理問卷與疲勞問卷使用,研究結果發現, 「腳酸」 、 「眼睛疲累」與「昏昏欲睡」的疲勞現象最為顯著,而疲勞 累積與實驗時間大致呈一線性正相關的關係;而不同受測者間,對於 達到相同程度的疲勞水準雖有時間上之差異,但多數人所能忍受之駕 駛時間大約為八小時。Eriksson 等人所進行的研究[6]中,透過偵測 瞳](https://thumb-ap.123doks.com/thumbv2/9libinfo/8152636.167159/15.892.197.696.200.415/顯著而疲累積與實驗時間大致呈一線性正相關關係而不駛時間瞳.webp)