國
立
交
通
大
學
電子工程學系 電子研究所碩士班
碩
士
論
文
使用 0.18μm 互補式金氧半製程設計之主動式
終端匹配 10-Gb/s 雷射二極體驅動器
A 10-Gb/s Laser Diode Driver with Active Back-Termination
in 0.18um CMOS Technology
研 究 生:邱茂成 Mao-Cheng Chiu
指導教授:蔡嘉明 教授 Prof. Chia-Ming Tsai
使用 0.18μm 互補式金氧半製程設計之主動式
終端匹配 10-Gb/s 雷射二極體驅動器
A 10-Gb/s Laser Diode Driver with Active Back-Termination
in 0.18um CMOS Technology
研 究 生:邱茂成 Student:Mao-Cheng Chiu
指導教授:蔡嘉明 教授 Advisor:Prof. Chia-Ming Tsai
國 立 交 通 大 學
電子工程學系
電子研究所碩士班
碩 士 論 文
A Thesis
Submitted to Department of Electronics Engineering & Institute of Electronics College of Electrical Engineering and Computer Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Electronics Engineering December 2007
Hsinchu, Taiwan, Republic of China
使用 0.18μm 互補式金氧半製程設計之主動式
終端匹配 10-Gb/s 雷射二極體驅動器
學生:邱茂成 指導教授:蔡嘉明 教授
國立交通大學
電子工程學系 電子工程研究所 碩士班
摘 要
由於雷射二極體本身為一非線性元件,因此雷射二極體驅動器為了能夠驅動低成本 的 10-Gb/s 雷射二極體,必須在輸出端做終端匹配(Back-Termination)以吸收由不理想負 載反射回來的反射信號。實現終端匹配最簡單的方法為在驅動器輸出端接上一個匹配電 阻,但所帶來的負載效應也使得這樣的做法非常沒有功率效益。為了克服功率消耗的問 題,近幾年已有許多實現在昂貴的砷化鎵與矽鍺製程上的主動式終端匹配架構被發表出 來。在此論文中,我們新提出一個主動式終端匹配架構以作為低成本且容易實現的一個 解決方法。此架構最主要由一個二極體連接形式的電晶體和一個與輸出調變電流成比例 的動態偏壓電流源組成。除此之外,我們使用堆疊架構並且加入恆定偏壓電路來降低溫 度 製 程 變 異 的 影 響 。 電 路 中 同 時 採 用 了 並 聯 尖 峰 (Shunt Peaking) 與 源 極 電 容 衰 減 (Capacitive Degeneration)來增加操作頻寬。我們並將此適用於低電壓先進互補式金氧半 製程的架構實現在一個供應電壓為 1.8V 之 10-Gb/s 雷射二極體驅動器上。此雷射二極 體驅動器採用了 TSMC 0.18um CMOS 製程,同時輸出調變電流範圍設計在 20mA 到 60mA。晶片量測的結果為上升時間與下降時間小於 38ps,且信號抖動量(Jitter)峰對峰 值為 12.3ps。輸出端反射損失在 10GHz 之前可以維持 7dB 以上。電路整體功率消耗在 輸出調變電流 60mA 狀況下只需 0.24W。電路佈局面積則是 760μm*610μm。A 10-Gb/s Laser Diode Driver with Active
Back-Termination in 0.18um CMOS Technology
Student:Mao-Cheng Chiu
Advisor:Prof. Chia-Ming Tsai
Department of Electronics Engineering & Institute of Electronics
National Chiao Tung University
Abstract
Laser diodes are inherently nonlinear devices, so driving a low cost 10-Gb/s laser diode requires the laser diode driver (LDD) with output transmission line back-termination which absorbs signal reflection from imperfect load. The simplest way to achieve back-termination is placing on-chip resistor at the output of the driver, but it is very power-inefficient because of loading effect. To overcome this problem, various design topologies of active back-termination implemented in expensive GaAs or SiGe bipolar process have been proposed in the past few years. In this thesis, we propose a new active back-termination topology to enable low-cost and flexible solution. It is composed of a diode-connected transistor and dynamic biasing current source proportional to output modulation current. Besides, we use cascode configuration and add constant-gm biasing circuit for reducing PVT variation. Inductive shunt peaking and capacitive degeneration are employed in this design to improve the operating bandwidth. The topology is suited to low supply voltage advanced CMOS process and is incorporated to implement a 1.8V 10-Gb/s single-ended LDD. This driver is fabricated in TSMC 0.18-µm CMOS process and the modulation current range is
return loss is better than 7dB within 10GHz and the power consumption of this driver is only 0.24W at 60mA modulation current. Die area of this design is 760µm*610µm.
誌謝
此論文得以順利完成,首先要感謝的是我的指導教授蔡嘉明博士,在這兩年多的學 習歷程中,不斷的給予鞭策和指導,讓我得以看見並學習從電路設計到晶片量測每個步 驟上態度的不同所造成的差異,以及唯有嚴謹與不間斷對自己要求始能帶來的豐碩成 果,在此同時謝謝老師耐心地指正我個性上的缺點,感激之心實是溢於言表,其次要感 謝口試委員吳介琮教授、黃弘一教授以及黃立仁博士口試時給予的諸多寶貴意見,使得 此論文得以更臻完善。 除此之外,非常感謝佶品電子黃老闆、蔚華科技的工程師們和 CIC 高頻量測實驗室 在晶片量測上的幫忙,還要感謝宜興、建君、珦益等在實驗室一起打拼的夥伴們,和你 們在這些同甘共苦的日子裡一起學習、討論電路和熬夜趕下線是我這兩年多來最美好的 回憶,當然也要感謝昭安和秉威等學弟,有了你們加入,實驗室才更加有活力,我的研 究生涯也因此更加多采多姿。 接下來要感謝的是父母對我的全力支持,給我勇氣與無限的關懷,使得我在研究所 的繁重課業和研究進度的壓力下,可以無後顧之憂的專注於研究之中,堅持到現在並且 完成研究所的課業。最後要感謝乃文,在忙碌地準備研究所考試同時,還要分擔我的壓 力與苦悶,有妳在的日子裡,每一天都值得努力並且充滿前進的動力,謝謝妳。 僅以此論文獻給我最愛的家人以及關心我的師長朋友們,因為有你們的照顧與幫 助,才有今日的我,願與你們分享這份榮耀。 邱茂成 2007.12.18 NCTU MISRC303目錄
中文摘要...i
英文摘要...ii
誌謝...iv
目錄...v
圖目錄...vii
表目錄...ix
第一章 緒論...1
1-1 動機...1
1-2 光纖通訊系統介紹...2
1-3 論文組織...3
第二章 高速光通訊傳送機之簡介...5
2-1 雷射二極體與操作特性...5
2-2 雷射二極體驅動器簡介...7
2-3 輸出端耦合介面的探討...7
2-4 設計參數規範和專有名詞的介紹...9
2-3-1 信號抖動與眼圖遮罩...9
2-3-2 高頻網路參數矩陣與轉換...10
第三章 具主動式終端匹配之 10-Gb/s 雷射二極體驅動器設計....14
3-1 引言...14
3-2 高速電路之終端匹配...15
3-3 主動式終端匹配之實現與設計考量...16
3-3-1 現有架構之缺點與討論...16
3-3-2 新提出適用於低電壓 CMOS 製程之主動匹配架構..20
3-4 電路架構與設計流程...21
3-4-1 輸出級與主動式終端匹配電路...22
3-4-2 直流偏壓電路...24
3-4-3 高速電路頻寬擴增技巧...27
3-4-4 前置放大器電路的設計...32
3-5 電路佈局...33
3-5-1 電感的實現...33
3-5-2 佈局考量...35
3-6 模擬結果與分析...37
第四章 實驗結果...42
4-1 量測環境介紹...42
4-2 晶片量測...43
4-2-1 電訊號量測...43
4-2-2 反射損失量測...46
4-2-3 光訊號量測...49
4-3 實驗結果摘要與比較...51
4-4 晶片照像圖...52
4-5 結論...52
第五章 討論與未來展望...54
參考文獻...55
附錄一...57
圖目錄
圖 1-1 光纖通訊系統架構...3 圖 2-1 電流轉光功率關係圖...6 圖 2-2 雷射二極體驅動器功能圖與雷射二極體交流小信號模型……...7 圖 2-3 直流耦合與交流耦合對輸出端電壓之關係...8 圖 2-4 信號抖動與眼圖遮罩示意圖...10 圖 2-5 雙埠網路入射波與反射波之關係...11 圖 3-1 阻抗匹配概念圖………..15 圖 3-2 被動元件終端匹配...16 圖 3-3 主動終端匹配輸出緩衝器概念...17 圖 3-4 回授放大器組態輸出級...18 圖 3-5 主動負載小電流雷射二極體驅動器…...19 圖 3-6 新提出之主動式終端匹配設計概念...21 圖 3-7 雷射二極體驅動器架構圖………..22 圖 3-8 主動式終端匹配之交流小信號模型...23 圖 3-9 恆定主動式終端匹配與恆定偏壓電路的實現...25 圖 3-10 主動式終端匹配阻抗隨溫度製程變異變化圖...25 圖 3-11 直流穩壓電路圖...26 圖 3-12 加入直流穩壓電路對於阻抗匹配的影響...27 圖 3-13 Shunt peaking 與其交流小信號模型...28 圖 3-14 輸出級與主動式終端匹配電路與分析圖... ...30 圖 3-15 輸出級頻率響應分析圖………..31 圖 3-16 主動式終端匹配電路頻寬擴增技巧比較圖...32 圖 3-17 前置放大器頻寬補償輸出信號眼圖與頻率響應模擬圖...33圖 3-18 堆疊螺旋電感...34 圖 3-19 八角型對稱差動電感………..35 圖 3-20 佈局走線效應模擬結果(對反射損失的影響)………36 圖 3-21 電路佈局平面圖...37 圖 3-22 磅線效應之模擬結果...38 圖 3-23 不同 corner 下之模擬結果...39 圖 3-24 不同操作狀態下之模擬結果...40 圖 4-1 量測儀器………...42 圖 4-2 L 型匹配網路...44 圖 4-3 電性測試 PCB 與量測設置圖...44 圖 4-4 不同輸出調變電流下電訊號量測眼圖...45 圖 4-5 時域反射測試結果...47 圖 4-6 不同輸出調變電流下的反射損失量測結果...48 圖 4-7 在開關狀態下的反射損失量測結果...48 圖 4-8 NEC 雷射二極體規格與測試...49 圖 4-9 光訊號測試 PCB 與量測設置圖……….49 圖 4-10 光訊號量測眼圖...50 圖 4-11 晶片照相圖...52 圖 4-12 雷射二極體 I/V 曲線圖...53
表目錄
表 1-1 SONET 與 SDH 相對應資料傳輸速率規格表...2 表 2-1 半導體雷射比較表...5 表 2-2 各參數矩陣互換公式表...13 表 3-1 常用的頻寬擴增技巧效果比較表...27 表 3-2 Shunt peaking 效果整理...29 表 3-3 模擬結果歸納表...41 表 4-1 電路效能歸納表...51 表 4-2 電路效能比較表...51第一章
緒論
1-1 動機
近年來,由於網際網路多媒體的蓬勃發展,以及全球化趨勢的影響,造就了許多如 YouTube 等網站的成功,進而顯示出人類對於網路頻寬以及通訊傳輸量的需求正逐年急 遽成長,電信公司亦表示以目前區域網路(Local Area Network, LAN)和都會型區域網 (Metropolitan Area Network, MAN)的傳輸成長量來看,很快的,以電纜傳輸為主的數位 用戶迴路(Digital Subscriber Line, DSL)將遇到發展瓶頸,因此,與傳統電纜傳輸相比, 具有低損耗、低干擾、傳輸頻寬大等優點的光纖通訊被期待成為下一世代的通訊網路, 以目前研發狀況來看,光纖通訊的傳輸速率已經進一步增加到 14-Tb/s,其訊號的衰減 也低於每公里 0.2 分貝(dB/km),每隔 160 公里才需要一個中繼器,傳輸效益已遠大於傳 統電纜傳輸網路,但要從現有的骨幹光纖網路發展至光纖到家(Fiber To The House, FTTH),最大的瓶頸便是光纖以及光通訊元件成本還要再降低,才能達到普及化的目標。
最 近 幾 年 , 全 球 電 信 發 展 和 標 準 制 定 之 主 管 機 構 國 際 電 信 聯 盟 (International Telecommunication Union, ITU)也正積極制定光纖通訊收發機所需的標準規格,因此目前 已有許多符合國際光通訊標準且傳送資料速率大於 10-Gb/s 之收發機是以砷化鎵以及矽 鍺製程來實現[1][2],原因來自砷化鎵和矽鍺製程先天上操作特性較互補式金氧半製程 佳,許多射頻電路設計上所遭遇的困難也較容易以砷化鎵和矽鍺製程來解決,但隨著半 導體製程的進步,使用低成本之互補式金氧半電晶體來取代昂貴的製程便成為目前全球 的研發趨勢與挑戰,此篇論文所提出之設計便是適用於低成本、低供應電壓之互補式金 氧半電晶體製程,並實現以往只有砷化鎵和矽鍺製程雷射二極體驅動器所能達到之功 能。
1-2 光纖通訊系統簡介
光纖通訊系統的發展,從 1960 年雷射(Laser)的發明、1970 年康寧公司發展出高品 質低損耗的光纖之後才算正式展開,在此之前一直缺乏同調性高的發光源以及適合作為 傳遞光訊號的介質,使得光纖通訊只是個概念。經過數十年的發展,不僅其傳輸速率快、 低損耗、安全性高的優勢已遠遠超越傳統電纜通訊系統,同時國際電信聯盟也為了能讓 不同的光纖通訊設備製造商之間有共通的標準,制定了許多與光纖通訊相關的標準,其 中 SONET(Synchronous Optical Network)在 1985 年由貝爾通信技術研究所提出來,針對 不同速率系統下,有其相對應的標準,而 SDH(Synchronous Digital Hierarchy)則是由歐 洲發展出來相似的標準,兩者皆是被國際電信聯盟所認可的國際摽準。下表 1-1 為這兩 種標準下不同資料傳輸速率所相應的規格。SONET
STANDARD
SDH
STANDARD
BIT RATE
OC-1 - 51.84Mbps
OC-3 STM-1 155.52Mbps
OC-12 STM-4 622.08Mbps
OC-48 STM-16 2.4883Gbps
OC-192 STM-64 9.9533Gbps
OC-768 STM-256 39.813Gbps
表 1-1 SONET 與 SDH 相對應資料傳輸速率規格表 圖 1-1 為典型的光纖通訊系統[3][4][5],其中包含三個主要的部份:(1)傳送機 (Transmitter, TX),由資料串列發送器和雷射二極體驅動器(Laser Driver)構成,輸入資料 為多使用者、較慢速的多通道平行資料,資料串列發送器將其編碼成高速串列資料送入 雷射二極體驅動器,並由雷射二極體驅動器驅動雷射二極體將電訊號轉換為光訊號發送 出去。(2)光纖(Fiber):為傳輸光訊號的媒介,目前光信號於品質較佳的光纖中傳送,損耗 率可小於每公里 0.2dB。(3)接收機(Receiver, RX),其中包含光檢測器(Photo diode)、轉 阻放大器(Transimpedance Amplifier, TIA)、限幅放大器(Limiting Amplifier, LA)、時脈與 資料回復電路(Clock and Data Recovery, CDR)和解多工器(De-multiplex, DEMUX),光檢測器接收光纖中的光信號並轉換成微弱的電流輸出,再經由轉阻放大器和限幅放大器將 訊號放大成全擺幅的數位訊號,而資料與時脈回復電路則是利用限幅放大器輸出的信號 解出時脈並且重整信號,使得原本抖動嚴重的信號還原成乾淨的信號,最後則經由解多 工器則將串列的信號轉換成原本的並聯信號。 圖 1-1 光纖通訊系統架構
1-3 論文組織
此篇論文主要的目的在介紹圖 1.1 中傳送機(TX)中之雷射二極體驅動器,我們提出 一個嶄新的主動式終端匹配架構,使其適用於低電壓先進深次微米互補式金氧半電晶體 製程實現之高速雷射二極體驅動器,與以往架構最大的不同即在於克服低供應電壓的設 計瓶頸,並實現一個具有主動式終端匹配之 0.18μm 互補式金氧半製程 10-Gb/s 雷射二 極體驅動器,有關電路的實現方法和流程,分別在以下的章節一一介紹。 本篇論文總共分為五個章節。第一章為緒論,在此針對基礎光纖通訊系統做個介紹,以及說明本論文組織的安排。第二章為研究基礎,我們會簡單介紹雷射二極體的操 作特性和設計高速光通訊傳送機所要考慮的一些問題以及設計參數,並且說明之後驗證 電路功能需要的高頻網路參數相關概念。第三章為具主動式終端匹配之 10-Gb/s 雷射二 極體驅動器的設計細節,由高速電路設計會遇到的阻抗匹配問題開始談起,並且探討目 前已提出之主動式終端匹配架構和說明以往之設計有何優缺點,再介紹本論文所提出之 新架構有何不同,然後才是細部電路的分析與整體電路設計考量。另外,對於設計 10-Gb/s 雷射二極體驅動器所用的頻寬擴增技巧也會在此章節做完整介紹與討論,最後 是電路佈局部份與透過 H-SPICE 和 Agilent ADS 的模擬結果來驗證電路的功能。第四章 則是晶片量測,內容包含討論晶片量測上的問題以及提供晶片實際量測出的電訊號、光 訊號、以及高頻特性等實驗結果。第五章則是針對先前所做的介紹做一個完整的結論, 並且探討一些可以改進和加強的地方。
第二章
高速光通訊傳送機之簡介
2-1 雷射二極體與操作特性
半導體雷射(Laser Diode, LD)相對於發光二極體(Light Emitting Diode, LED),具有光 譜同調性高、高效益以及速度快等優點,因此長距離高速光通訊所用的發光源皆以半導 體雷射為主,再搭配高速雷射二極體驅動器以及自動功率控制迴路組成傳送端,一般常 見 的 雷 射 二 極 體 有 FP(Fabry-Perot) 、 DFB(Distributed-Feedback) 、 以 及 成 本 較 低 的 VCSEL(Vertical Cavity Surface Emitting Laser)。這三種雷射分別有不同特性與應用方 面,表 2-1 列出這三種半導體雷射的比較表[6]。
臨界電流
光譜寬度
應用面
FP Laser
大
大
低速、多模
DFB Laser
大
小
長距離、高速
VCSEL Laser
小
小
短距離
表 2-1 半導體雷射比較表 以下說明雷射二極體常用到的規格和專有名詞: (1) 波長(Wavelength): 半導體雷射依應用可分為長波長和短波長兩種,短波長雷射泛指 發光波長由 390nm 到 950nm 之雷射二極體,其最主要應用於光碟機、條碼機、雷 射印表機等光資訊與顯示科技應用,長波長雷射則是指發光波長於 980nm 至 1550nm 之雷射二極體,主要應用方面則為光通訊。雷射二極體由構造和材料的組 成不同,其產生的波長範圍也因此不同。(2) 臨界電流(Threshold Current):此參數代表驅動雷射二極體發光所需的最小電流,如 圖 2-1 中的 Ith,會依據溫度變化而有所不同。 (3) 調變電流(Modulation Current): 雷射二極體的發光功率會隨著通過電流的大小成線 性變化,而雷射二極體驅動器最主要的功能為將電訊號轉為光訊號,因此設計上可 以使用電訊號切換電晶體之差動對來切換電流源,使得雷射二極體的發光根據高低 準位的電訊號產生相同相位的強弱變化,此與輸出光訊號相對應流經二極體之電流 源即是調變電流,如圖 2-1 之 Imod。 (4) 發光效率(Efficiency):雷射二極體電轉光的效率即是發光效率,也就是圖 2-1 中的電 流轉光功率關係斜線的斜率η,亦稱之為電流-功率比(mW/mA),此參數也會隨溫 度而產生變化。 圖 2-1 電流轉光功率關係圖 (5) 監控電流(Monitor Current): 一般來說,因為雷射二極體電光轉換特性會隨溫度改變 而改變,為了能夠監測發光的情形,可能會有所謂的監控光檢測器(Monitor-PD)來 感應輸出的光產生相對應的監控電流,目的即在於利用監控電流加上功率控制迴 路,適當的調整雷射二極體直流偏壓電流和調變電流的大小,讓輸出光信號的大小 保持穩定,此參數通常會列於雷射二極體規格表上,方便功率回授電路的設計。
2-2 雷射二極體驅動器簡介
雷射二極體驅動器切換調變電流來直接驅動雷射二極體稱之為直接調變,驅動雷射 二極體的電流分為兩個部份,如圖 2-2(a)所示,一個是提供偏壓的直流偏壓電流源,一 個是提供高低位準輸出信號的高頻調變電流源,在設定上會將直流偏壓電流源調整在臨 界電流以上,並且以輸入信號做為調變電流源的開關信號,使得雷射二極體具有跟輸入 信號同步之電流調變信號,輸出光信號高準位的功率和輸出光信號低準位功率的比值稱 之為亮暗功率比(Extinction Ratio, ER),也會設定在一定的值,目的在於(1)符合通訊規 範,(2)減少導通延遲現象,提高操作速度並且避免輸出波形失真。 一個 DFB 雷射二極體的小信號模型可視為如圖 2-2(b)所示,在導通時存在大約 0.7 到 2.2V 的電壓降,小信號電阻值大約在 5 歐姆(實際情況約為 3~8 歐姆),並且包含大 約 2pF 的寄生電容,此外,目前許多操作在高速的雷射二極體,會在封裝時輸出端串上 一個約 20 歐姆左右的電阻,讓輸出阻抗成為 25 歐姆,以作為高頻阻抗匹配以及降低振 鈴效應的阻尼電阻,這是因為雷射二極體本身阻抗只有 5 歐姆左右,若要製作低阻抗的 傳輸線來做阻抗匹配,除了不易製作之外也容易有所變異而導致匹配狀況不佳。 (a) (b) 圖 2-2 雷射二極體驅動器功能圖與雷射二極體交流小信號模型2-3 輸出端耦合介面的探討
雷射二極體驅動器驅動雷射二極體的方式分為兩種,分別為直流耦合(DC Coupled)與交流耦合(AC Coupled),圖 2-3 為這兩種情形介面下,流過雷射二極體的電流(IL)與雷 射二極體驅動器輸出端電壓之情形[7]。使用直流耦合為介面的情況下,光輸出信號為
High時,流過雷射二極體之電流為(I bias+Imod),此時雷射二極體驅動器輸出點電壓為最
低,若我們設計之調變電流太大,將可能使輸出級差動對之電晶體過度進入線性區 (Triode Region),導致差動對切換速度變慢造成電路頻寬降低以及輸出波形失真,相反 的,當輸出點電壓高時,對於深次微米低電壓金氧半製程下所設計之雷射二極體驅動器 來說,可能會造成跨壓過大,產生電晶體崩潰(Breakdown)現象並成為永久性的損害,為 了避免這些情形的發生,低電壓製程驅動電路輸出級調變電流範圍的設計就需要非常謹 慎。 圖 2-3 直流耦合與交流耦合對輸出端電壓之關係 使用交流耦合做為輸出介面可以減輕調變電流設計上的困難度,但缺點是所加之被 動元件都在信號路徑上,因此高頻特性直接影響輸出訊號,特別是在連續 0 和連續 1 等 較低頻信號時,會有直流偏移現象造成資料相依抖動(Data Dependent Jitter)嚴重的情
形,除此之外,交流耦合介面所需偏壓電流較直流耦合大,因此功率效益亦較直流耦合 差。
2-4 設計參數規範和專有名詞的介紹
2-4-1 信號抖動(Jitter)與眼圖遮罩(Eye Mask) 信號抖動(Jitter)則是光纖通訊中評斷雷射二極體驅動器好壞的重要依據之ㄧ,其定 義為 50%信號邊緣距離對於理想位置的時間差距,若雷射二極體驅動器其傳送出的資料 抖動量越大,在接收機端的資料時脈回復電路要對其序列資料進行還原時,容易判斷錯 誤,所以在雷射二極體驅動器的設計上,產生之抖動量越少越好。 如圖 2-4(a)所示,對於信號抖動的定義可分為以下兩類[8]:定量性抖動(Deterministic Jitter,DJ)與隨機性抖動(Random Jitter,RJ),隨機性抖動來自於系統元件中不可預 期之熱雜訊與閃爍雜訊(Flick Noise),其定義量以方均根來描述,而定量性抖動則是設 計中主要探討的部份,其來源為系統中與資料相關的抖動,細分之下又可分為資料相關 抖動(Data Dependent Jitter) 與週期性抖動(Periodic Jitter)。週期性抖動一般是由外部雜訊耦合到內部造成輸出的不穩定,例如供應電源器的擾 動或射頻訊號間的干擾,資料相關抖動則是系統內部發生的現象造成,最典型的來源是 反射與頻寬不足造成的符號間干擾(Inter-Symbol Interference, ISI),或是臨界電壓偏移 (Threshold Shift)造成的工作周期失真(Duty Cycle Distortion, DCD),定量性抖動量以峰對 峰值(Peak-Peak)來定義,可以預期並可加以減少,其解決的辦法主要依靠電路設計時與 印刷電路板設計時多加考量,減少上述所說之干擾因素。
(a) (b) 圖 2-4 信號抖動與眼圖遮罩示意圖 眼圖遮罩為量測信號上根據國際傳輸標準所定義出來的規範,不同標準下有不同規 範 , 如 10-Gb/s 傳 輸 速 率 下 之 OC-192/STM-64 標 準 針 對 信 號 抖 動 與 眼 圖 張 眼 (Eye-Opening)程度有其定義,因此若傳輸信號可以通過眼圖遮罩的規範即是滿足此傳 輸速率下的標準,圖 2-4(b)是經由 OC-192/STM-64 眼圖遮罩測試下的信號眼圖,若眼圖 遮罩餘量越大代表此信號符號間干擾(Inter-Symbol Interference, ISI)和信號抖動量越小, 也就是信號品質越好。 2-4-2 高頻網路參數矩陣與轉換 對於描述一個電路網路的特性,可經由測試電路網路的各種參數,就可以定量上掌 握此網路所具有的特性,而像放大器、濾波器、電晶體那樣的雙埠網路,經常使用的參 數就是 Z 參數、Y 參數、H 參數等參數,測試這些參數的方法則是將雙埠網路的輸入端 和輸出端加以短路或開路,然後測試其電壓和電流等關係,最後再以 2×2 矩陣來表示雙 埠網路各埠間的網路特性,這樣的參數在電路分析上經常使用來表示整體電路網路的特 性,稱之為雙埠網路參數矩陣。 相對於以總電壓、總電流之間的關係來表示網路特性的這些參數,還有另外一種經 常使用於高頻領域,並且利用來測試電路網路與高頻元件特性的散射參數(Scattering Parameter),也就是 S 參數。為了表示波在微波電路上的反射與傳送現象,此參數並非 如 H 參數屬於電壓電流表示,而是使用功率,也就是以傳輸線阻抗 Zo 正規化後的電壓 波或電流波來表示其間的關係,測試的方法則是把輸入端或輸出端以特性阻抗端接時,
找出入射波與反射波間的關係,圖 2-5(a)為一個雙埠網路,a 表示入射網路的正規化電 壓波,b 為網路出走的正規化電壓波,入射波以 a1 輸入的時候,反射到輸入端的波以 b1 表示,透過到輸出端的波則以 b2 表示,還有從輸出端輸入入射波 a2 時反射到輸出端 以 b2 表示,透過到輸入端的波以 b1 表示,亦即 b1 包含入射波 a1 之反射和 a2 之透射, 同樣地,b2 也包含入射波 a2 之反射和 a1 之透射,這樣的關係可以下列式子(式 2-1、2-2) 表示[9]。 (a) (b) 圖 2-5 雙埠網路入射波與反射波之關係 b1 = S11⎡ ⎤ ⎡ S ⎤ ⎤ .a1 + S12 .a2
(公式 2-1)
b⎣ ⎣ 2 = S21.a1 + S22 .a2(公式 2-2)
以圖 2-5(b)為例,S11 為反射波b1 相對於輸出端以特性阻抗Zo端接時的輸入端輸入 波a1 的比率,稱為輸入反射係數,S21 則是輸出端的透過波b2 相對於輸出端以特性阻抗 Zo端接時的入射波a1 之比率,稱為順向穿透比率,同理,當輸入端接上終端阻抗Zo時, S12 為入射波a2 向輸入端透射過的透射波b1 之比率,稱之為反向穿透係數,S22 則為從 輸出端把入射波a2 加入時的反射波b2 之比率,即稱為輸出端之反射係數。所以終端阻 抗又稱為匹配負載(Matching Load),為傳輸線特性阻抗之負載,這四個散射參數使用上 可以表示成一個 2×2 矩陣,因此又稱為散射矩陣。在高頻的測試上常以反射係數的絕對 值對數來表示其大小,並且將這樣的參數定義為反射損失(Return Loss),反射損失計算 的方法舉埠一為例,其值為-20log(|S11|),單位則是分貝。 S 參數與其他參數的不同在於定義上以特性阻抗 Zo 為參考標準作正規化,而一般 傳輸線或者是網路分析儀皆以特性阻抗為 50 歐姆為主要測試情形,當面臨阻抗系統之 不同,例如雷射二極體之 25 歐姆阻抗系統或是射頻天線常用的 75 歐姆阻抗系統,其 S 參數必須經由 Z 參數做不同系統間的轉換,除此之外,若要得知網路與網路之間串聯、 ⎥ ⎦ ⎢ ⎣ ⎡ ⎥ ⎦ ⎢ = ⎥ ⎦ ⎢ 2 1 22 12 21 11 2 1 a a S S S b b並聯等連接之後的 S 參數,也需要藉由其他參數如 T 參數、H 參數來做數學上的運算, 再轉回 S 參數。我們以之後晶片量測上會使用到的 50 歐姆阻抗系統 S 參數轉換至 25 歐 姆系統 S 參數為例子,當我們求得 50 歐姆系統下之 S11、S12、S21、S22 之後,再經由 下列式子 2-3、2-4,可以得到正規化之後的 Z 參數,藉由 2-5 式中將特性阻抗 Zo 原本 為 50 歐姆改以 25 歐姆做正規化可得到 25 歐姆系統下正規化之 Z 參數,最後再由 2-6 之轉換系數以及 2-7 式轉換回 S 參數,即可得到 25 歐姆系統下之 S 參數。表 2-2 為各參 數間轉換公式表與轉換系數[10]。 21 12 22 11 5=(1−S )(1−S )−S S ∆
(公式 2-3)
5
)
1
)(
1
(
,
5
2
5
2
,
5
)
1
)(
1
(
21 12 22 11 22 ' 21 21 ' 12 12 ' 21 12 22 11 11 '∆
+
+
−
=
∆
=
∆
=
∆
+
−
+
=
S
S
S
S
Z
S
Z
S
Z
S
S
S
S
Z
(公式 2-4)
Z
'
=
Z
/
Z
,
'
=
Z
/
Z
,
(公式 2-5)
'
,
22 22 21 21 12 12 11 11 o o o oZ
Z
21 12 22 11 1=
(
Z
'
+
1
)(
Z
'
+
1
)
−
Z
'
Z
'
∆
(公式 2-6)
1
)
1
)(
1
(
S
,
1
2
21
1
2
,
1
)
1
)(
1
(
21 ' 12 ' 22 ' 11 ' 22 21 ' 12 ' 12 21 ' 12 ' 22 ' 11 ' 11∆
−
−
+
=
∆
=
∆
=
∆
−
+
−
=
Z
Z
Z
Z
Z
S
Z
S
Z
Z
Z
Z
S
(公式 2-7)
,
/
/
'
Z
Z
Z
Z
Z
=
=
第三章
具主動式終端匹配之 10-Gb/s 雷射二極體
驅動器設計
3-1 引言
在現今光纖通訊相關電路的研究中,高速、低成本、低功耗已經成為趨勢,而一個 10-Gb/s 的光通訊系統發射端電路中,雷射二極體驅動器是一個關鍵的前端主動元件, 其主要功能為轉換輸入電壓訊號成電流訊號去驅動雷射二極體,以實現電/光轉換的過 程,由於雷射二極體天性上具有輸入阻抗非線性且與操作狀態相關的特性,再加上傳輸 線終端與雷射二極體連接面的不連續和電感效應,因此容易造成匹配不佳的狀況,固當 資料傳輸速率越來越快的時候,雷射二極體驅動器的輸出阻抗就必須匹配傳輸線的特性 阻抗作為信號源之終端匹配(Source Matching),去吸收由傳輸線終端和低成本雷射二極 體阻抗不匹配造成的高頻反射訊號,避免再次反射(二次反射)而造成輸出訊號的干擾, 導致輸出訊號視圖波罩餘量(Eye Mask Margin)的降低和抖動量的增加。本篇論文,目的在提出一個適用於 CMOS 低電壓製程雷射二極體驅動器之主動式 終端匹配架構,有別於以往使用被動元件終端匹配以及應用於矽鍺與砷化鎵製程之主動 式終端匹配架構,我們將所提出之架構得以實現於TSMC 0.18um CMOS 製程,不僅大 大降低功率消耗也使得供應電壓降低到1.8V,以期可以傳送更好的光訊號品質並且有利 於未來光通訊晶片之單晶片系統整合的趨勢。以下將從高速電路阻抗匹配開始談起,再 依序討論主動式終端匹配之概念、先前提出之架構有何缺點,以及整個具主動式終端匹 配之雷射二極體驅動器設計的細節。
3-2 高速電路之終端匹配
阻抗匹配在高頻電路設計上是很重要的一環,其基本概念如圖 3-1 所示,電壓源Vs 傳送信號至負載端RL,由傳送到負載阻抗之功率來推算可以得知,當RS=RL時,負載端 才能夠獲得最大功率,同樣的,當高頻信號透過傳輸線傳輸信號至負載端,負載阻抗必 須與傳輸線之高頻阻抗,亦稱為特性阻抗(Characteristic Impedance)Zo匹配以獲得信號的 有效傳輸,這樣的情形我們稱之為終端匹配。 以下藉由圖 3-1 中的三種極端情形來探討當信號透過一理想傳輸線傳送信號至負載 端的信號暫態情況(1)終端匹配:當負載端阻抗與傳輸線特性阻抗相等時,電流源Iin產生之 步波信號I0傳送至負載阻抗被負載完全吸收,因此終端之暫態電壓為V0=I0*Zo,(2)終端 開路:當電流源產生之步波信號I0傳送至負載端,由於終端開路而產生一同相位反射訊號 反射回信號源,造成終端之暫態電壓為入射訊號與反射訊號之總合,加乘的效果讓終端 暫態電壓會等於信號源之兩倍,(3)終端短路:當電流源產生之步波信號I0傳送至負載端, 終端短路讓信號產生一相位反向之完全反射,反射訊號和入射訊號加總情形使得終端暫 態電壓為0。由以上三種特殊情況顯示,當終端阻抗與傳輸線特性阻抗不匹配而產生反 射時,反射信號會加總於入射訊號造成傳送信號之變化,因此在設計高速雷射二極體驅 動器時,必須考量雷射二極體、傳輸線、以及驅動器之輸出阻抗是否匹配,否則當反射 訊號形成多重反射干擾傳送訊號位準,就會導致輸出信號符號間干擾情況嚴重以及信號 抖動的增加。 圖 3-1 阻抗匹配概念圖解決高速雷射二極體驅動器輸出級所面臨之終端匹配問題,最簡單的方法是雷射二 極體驅動器輸出端使用晶片內電阻來匹配傳輸線特性阻抗[11],如圖 3-2,RT 為匹配傳 輸線阻抗值之電阻,當傳輸線終端與負載阻抗不匹配產生反射返回驅動電路輸出級時, 反射波會被與傳輸線阻抗匹配之RT所吸收,但所付出的代價就是負載效應造成雷射二極 體驅動器輸出調變電流會消耗一半於匹配阻抗RT上,因此若要達到同樣的光輸出功率, 輸出級之電流源必須大於兩倍IM ,以消耗功率觀點來看這是非常沒有效率的作法,除此 之外,更大電流的輸出級必須以更大尺寸的差動對來設計和輸入電壓來切換,更加造成 頻寬上的限制以及前級驅動器設計上的困難。 圖 3-2 被動元件終端匹配
3-3 主動式終端匹配之實現與設計考量
3-3-1 現有架構之缺點與討論 近年來,為了解決功率消耗過大的問題,高速雷射二極體驅動器相關研究趨勢之 ㄧ,就是利用主動電路去同時達到輸出阻抗匹配且具有不減損輸出電流之特性,也就是 所謂的主動式終端匹配,到目前為止,已有三篇10-Gb/s 雷射二極體驅動器相關研究論 文發表於知名國際期刊和國際會議中[12][13][14],以下將分別介紹其主動終端匹配架構 的概念與限制:(1) A 10Gb/s Laser/Modulator Driver IC With a Dual-Mode Actively Matched Output Buffer (JSSC 2005):
System)於 2005 年所發表之期刊論文,此篇論文為一個供應電壓為 5V的砷化鎵製程單端 輸出雷射二極體驅動器,主要的概念如圖 3-3 所示,Io為雷射二極體驅動器所等效之調 變電流源,輸出端透過一阻抗為Zo的傳輸線驅動雷射二極體,雷射二極體負載則等效為 RL與直流電壓源Vd,在其輸出端加上一個增益為一同時輸出阻抗為RM之緩衝器MA,緩 衝器輸入信號利用一個輸出級等比例縮小的複製電路與大於傳輸線阻抗k倍之電阻產 生,對於輸出信號來說,雷射二極體驅動器驅動雷射二極體在輸出端產生Io×Zo之輸出電 壓,而輸出級複製電路透過k倍之電阻產生相同大小、相位之電壓,因此在輸出級輸出 阻抗兩端有相同之電壓信號,使得流過之信號電流IM為 0,雷射二極體驅動器之調變電 流就完全輸出至雷射二極體。相反的,對於反射訊號來說,緩衝器所設計之輸出阻抗RM 大小為剛好匹配傳輸線阻抗Zo,反射訊號反射至雷射二極體驅動器輸出端時,即被終端 匹配阻抗RM所吸收而不至於產生二次反射。 這樣的主動式終端匹配架構,理論上省下了 50%的輸出電流,並且達到了吸收反射 訊號的功能,但其實現緩衝器的方法為利用源極隨耦器(Source Follower)輸出阻抗小的 原理,為了使緩衝器輸出阻抗匹配雷射二極體驅動器輸出端之傳輸線阻抗,必須將源級 隨耦器直流偏壓在較大的電流以得到較小之輸出阻抗 1/Gm,為此在設計上就已經消耗 許多電壓降空間,再加上一般雷射二極體驅動器調變電流若超過60mA,其輸出信號擺 幅必定超過1.5V,要同時在源級隨耦器閘極端產生如此大的信號擺幅就必須提高供應電 壓,設計上造成了供應電壓與輸出調變電流的限制,也導致這樣的架構並無法應用於現 今之低供應電壓CMOS 製程下。 圖 3-3 主動式終端匹配輸出緩衝器概念
(2) A 3V 10.7Gbps Differential Laser Diode Driver with Active Back-Termination Output Stage (ISSCC 2005):
此篇論文由美商亞德諾半導體(Analog Devices, ADI)所提出,目前亦應用於其晶片
產品中,是一個供應電壓 3V並且為差動輸出之矽鍺製程雷射二極體驅動器,實現的概
念主要利用線性回授放大器差動對做為輸出級去驅動雷射二極體,如圖3-4 所示,達靈
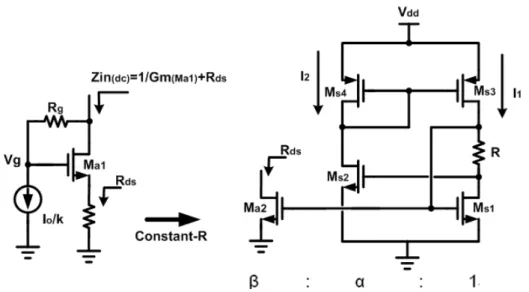
頓組態回授放大器(Darlington Feedback Amplifier)一般使用於射頻電路系統做為寬頻線 性放大器[15],在此則當輸出調變電流放大器,由前級驅動器等效為一信號電流源Iin, 電流Iin大小則為IO/k,透過增益為k之電流放大器輸出IO驅動雷射二極體等效負載RL,同 時此回授組態具有輸出阻抗Ro降低的特性,所以可由回授分析算出Ro(公式 3-1)並且設 計成匹配傳輸線特性阻抗Zo以作為輸出端之終端匹配。 圖 3-4 回授放大器組態輸出級 Rs gm Rs R Ro f × + + = 1
(公式 3-1)
由電流增益k之小信號分析(公式 3-2~3-4)上可以看出設計上希望讓電流增益k較高 來達到好的功率效益,但前提是Ro之值須滿足寬頻之低輸出阻抗並同時不受溫度製程變 異影響才能達到較好的阻抗匹配效果,因此必須額外加入複雜的回授控制電路,並且需 要讓輸出放大器在操作時不能完全切換來保持阻抗匹配的功能,這樣的設計條件要使用 低電壓低成本的金氧半製程來實現會非常困難,除此之外,此架構之信號路徑與反射路 徑的相互影響也因為同時整合在回授放大器中而較大。
in s o L o o f I R V V gm I R I V gm I R V1= − ( − ⋅ 1)− ⋅ , − ⋅ 1= 1 +
(公式 3-2)
o L L f s s f in o k R R R R R R R gm I I = = + + ⋅ ⋅ − = → (1 ) ,(公式 3-3)
1 ) 1 ( ) 1 ( >> = ⋅ ⋅ + ⋅ − = → k R R gm R R gm I I o s s f in o(公式 3-4)
(3) 45% Power Saving in a 0.25um BiCMOS 10Gb/s 50Ω-Terminated Packaged Active-Load Laser Driver (ISSCC 2007):
此架構為英特爾公司所提出來的一個供應電壓為1.8V之雷射二極體驅動器,主要應 用在短距離晶片相互通訊傳輸介面,驅動電路所驅動的負載為低電流應用之VCSEL,圖 3-5 所示為由輸出端加上電流源測試的輸入阻抗Zi,輸出級輸出端加上由電阻Rf、高增益 放大器與兩端PMOS當作主動負載組成的一個高速迴路,目的在於使輸出端看進去的阻 抗匹配傳輸線阻抗Zo,我們可由克西荷夫定律分析(公式 3-5~3-8)得知,當條件滿足公式 3-7 時,即迴圈增益非常大,其輸入端看進去的阻抗就可以等於公式 3-8 所示,設計時 可以讓RF非常大且另一輸出端之RL等於我們要匹配之傳輸線阻抗,即可得到一個不需要 很大gm的主動式終端阻抗匹配,這也就是為什麼此電路可以得到較高之功率效益的原 因。 圖 3-5 主動負載小電流雷射二極體驅動器
f o i i o i i o i L o o i f R V V v V V A gm I V V R V V V A gm R ) 2 2 ( , ) ) 2 ( ( 2 + − + + ⋅ ⋅ = − = + + ⋅
(公式 3-5)
) 1 ( 2 ) 1 ( 2 ) ( f L f f L f f f i i dc i R A gm R R R A gm R R R A gm R I V Z ⋅ ⋅ + + ⋅ ⋅ + ⋅ ⋅ + = = →(公式 3-6)
if gm⋅A⋅Rf >>1 ,gm⋅A⋅RL >>2(公式 3-7)
i(dc) ( L|| 2f ) R R Z = →(公式 3-8)
但是此電路的缺點為需利用一個寬頻且高增益的放大器作為回授組態,同時輸出點 直流電壓設定的重要性使得這架構只能使用交流耦合當作介面,當應用方面是屬於大信 號長距離傳輸光纖通訊時,就必須將調變電流增大去驅動FP 或 DFP 雷射二極體,此時 操作點的變化有可能造成回授組態的改變而影響其阻抗匹配,同時gm 也必須增加以滿 足良好阻抗匹配的條件,所以此架構亦難以適用於低電壓之先進金氧半製程,除了設計 一個寬頻、高增益一個放大器會是一個瓶頸之外,動態操作範圍(Dynamic Range)的問題 讓電路供應電壓在大電流操作時也必須提高以保證操作狀態的正常,而且雷射二極體驅 動器與主動式終端匹配可以應用的頻寬也會因為元件寄生電容增加而降低。 3-3-2 新提出適用於 CMOS 低電壓製程之主動匹配架構在我們的研究過程中,發現對於需要驅動大電流之長距離高速光纖通訊方面,目前 已提出之架構均無法適用於低供應電壓的 CMOS 先進製程雷射二極體驅動器,因此我 們研究的動機便是嘗試提出一個新架構,使主動式終端匹配之概念可以突破供應電壓的 限制,實現在供應電壓為1.8V 的 TSMC 0.18um CMOS 製程 10-Gb/s 雷射二極體驅動器 中。 我們提出之主動式終端匹配架構的初步概念如圖 3-6 所示,Io為雷射二極體驅動器 輸出級等效之輸出調變電流源,輸出端同時包含由回授電阻Rg連接作為二極體連接形式 (Diode Connected Type)的電晶體Ma,其偏壓驅動電流為與輸出調變電流反向且大小為 1/k倍,作用為使輸出級輸出電流信號驅動雷射二極體時,偏壓驅動電流透過Rg形成一與
信號大小相同之電壓降,當我們設計k=1+Rg/Zo時即可保持Vg=Vo-(Io/k)×Rg為恆定電壓, 如此一來,對於輸出信號而言,Vg視同直流偏壓點,所看到的阻抗為Rg並聯傳輸線阻抗 Zo,若k值設計的越大,幾乎所有的輸出電流就會流至雷射二極體產生光信號輸出而不 消耗功率在Rg上。 反之,對於反射訊號而言,Ma之偏壓電流在同時間上並不與反射訊號相關,因此 Vg不被視為恆定的直流偏壓點,所看見的輸出端阻抗在假設電流源輸出阻抗無限大的情 況下就變成Ma的電導倒數,也就是Za(dc)=1/Gm(Ma),如果我們將Ma設計在適當偏壓點下, 就可以匹配傳輸線阻抗Zo達到吸收反射訊號之終端匹配,以上就是我們提出之主動式終 端匹配的設計概念。 圖 3-6 新提出之主動式終端匹配設計概念
3-4 電路架構與設計流程
此次所設計具有主動式終端匹配之雷射二極體驅動器的架構如圖 3-7 所示,共包含 主動式終端匹配電路、輸出級以及由前級驅動器與輸入級組成之前置放大器,設計的目 標主要為電路頻寬 10-Gb/s、輸出端反射損失 10dB 與最大輸出驅動電流 60mA,電路實 現所使用的製程為 TSMC 0.18μm CMOS,電路供應電壓則是 1.8V,有關電路設計的細節
與流程我們將在以下章節詳細說明。 圖 3-7 雷射二極體驅動器架構圖 3-4-1 輸出級與主動式終端匹配電路 主動式終端匹配電路部份可由圖3-8 交流小信號模型與公式 3-9 推導公式得知主動 式終端匹配阻抗Zin隨頻率變化的特性,由於Rg遠大於1/gm導致主動式終端匹配高頻特性 有如主動電感,其零點頻率低於極點頻率,Cgs則為電晶體Ma之閘極與源極端寄生電容, 高頻阻抗在超過其零點(1/CgsRg)時便開始增加而超過我們所設定之阻抗值,所以為了保 證其阻抗與反射損失在我們應用的頻率之下都能滿足我們所設定的規範之內,Rg的值、 電晶體大小、以及偏壓電流的取捨就相當重要。我們設計主動式終端匹配電路的流程如 下:為了匹配傳輸線阻抗 25 歐姆,我們必須使電晶體Ma直流偏壓在電導gm=1/25S,調整 其偏壓電流會有其對應的寬長比值,其尺寸越大則寄生電容Cgs越大將導致高頻時匹配能 力不佳,同時,設計上會讓k值大於 10 來得到較好的輸出電流效益,Rg越大則輸出信號 損失越小以及保持V1電壓點恆定直流偏壓所需的驅動電流可以越小,但其高頻反射損失 將會隨著零點的前移而變差。 為了滿足設計目標反射損失 10dB,因此我們設計上作了一些取捨,首先將主動式 終端匹配電路偏壓電流設定在30%最大輸出調變電流以得到足夠的反射吸收能力,因此 Ma之偏壓電流設計為 20mA,Rg則設定為 400 歐姆,而V1設定在 1.1V電壓並且保持恆 定,使得最後完整電路設計完之後反射損失在10GHz之前能夠保持在 10dB以上。
+ →∞ + = o gs g gs in r sC gm R sC Z 1 ,
(公式 3-9)
另外,主動式終端匹配偏壓驅動電路的目的在於保持Vg點電壓的恆定,因此與輸出 調變電流反相之偏壓驅動電流我們使用一個輸入信號與輸出級相同的差動對來產生,大 小則隨電流比值與輸出級成一個比例,並且採用源極退化技巧(Source Degeneration)增加 偏壓驅動電流信號的線性度以及降低溫度製程變異的影響,讓Vg點電壓更加穩定。 圖 3-8 主動式終端匹配之交流小信號模型雷射二極體驅動器輸出級的設計首先須考慮輸出調變電流的範圍,我們將輸出點 Vo直流電壓定在 1.8V,主動式終端匹配電路透過偏壓驅動電路和電阻Rg產生壓降使Vg 保持在1.1V左右,因此設計時除了必須確保主動式終端匹配電路在輸出信號範圍內皆保 持正常工作而不至於進入線性區偏移所需匹配的阻抗之外,輸出調變電流的限制也在於 輸出級差動對若過度進入線性區將導致電路頻寬下降,同時為了完全切換調變電流,大 輸出調變電流需要輸出級差動對過大的切換電壓與大小會讓前置放大器難以設計,在電 路頻寬、電路回授損失、前置放大器這些條件取捨之下,我們設計此驅動器輸出級最大 輸出調變電流為60mA,所需之切換電壓擺幅為單端 600mVpp,驅動雷射二極體負載25 歐姆時會產生1.5V的輸出擺幅,這樣子的設計可以保持電路操作在 10-Gb/s同時不讓主 動式終端匹配電路離開工作區。
3-4-2 直流偏壓電路 主動式終端匹配電路匹配阻抗的特性除了會隨頻率變化之外,也會隨著直流偏壓 點、溫度、製程變異而與設計時有所不同,因此保持主動式終端匹配阻抗狀態的穩定, 也是設計上相當重要的一面,以下我們將分為兩個方面去探討直流偏壓電路的設計以解 決阻抗變化的問題,一個為降低溫度製程變異的方法,另一個為討論解決直流偏壓點隨 輸出端改變的問題。
(1)恆定電導偏壓電路(Constant-gm Biasing Circuit):
因應主動式終端匹配電路中的電晶體Ma之電導會隨溫度製程變異而影響其阻抗匹
配特性,我們提出一解決方法如圖 3-9,將主動式終端匹配架構改為堆疊形式,藉由讓
阻抗Zin變為電晶體Ma1 與恆定電阻Rds之串聯來穩定主動式終端匹配電路的阻抗,恆定 電阻則由一操作狀態為深度線性區(Deep Triode Region)之電晶體Ma2 與恆定偏壓電路 [16]來實現,假設I1=I2,可推導出電晶體Ma2 從汲極端看進去的通道電阻如公式 3-10 所 示為一個與溫度製程無關,只由外接電阻R以及電晶體大小比例所決定,由於外接電阻 R相對於製程溫度變異而言穩定許多,當Rds佔有一定比例時,主動式終端匹配電路輸入 阻抗Zin受到溫度製程變異的影響就會改善許多,除此之外,也因為堆疊結構,使得通道 調變效應(Channel Length Modulation Effect)對Zin的影響小很多,當雷射二極體驅動器輸 出端電壓變化時,所造成的阻抗變化也比原先的小。 在設計Rds時,所需考慮的因素是當Rds所佔比例大時,雖然相對穩定,但為了保持 阻抗為25 歐姆,電晶體Ma1 的尺寸會增加許多,除了造成輸出端頻寬的限制之外,也 造成高頻阻抗匹配特性不佳(Cgs變大),為此設計上可以找到一最佳點,使得滿足高頻阻 抗匹配特性規格下亦可得到對於溫度製程變異有較佳抵抗力,最後我們由模擬來驗證知 道當Rds之值在 7.5 歐姆左右所得到的最大變異值為 17%,比起Rds使用poly電阻的 35% 相對上好了許多。 α β α ⋅ − ⋅ ⋅ = ) 1 ( 2 R Rds
(公式 3-10)
12 ( / ) 12 ) / ( , ) / ( ) / ( Ms Ma Ms Ms L W L W L W L W = =β
α
(公式 3-11)
圖 3-9 恆定主動式終端匹配與恆定偏壓電路的實現 圖 3-10 主動式終端匹配阻抗隨溫度製程變異變化圖 (2)直流穩壓電路: 雷射二極體的直流跨壓會隨著通過電流而變化,因此當我們採用直流耦合驅動介面 時,驅動器輸出級輸出點直流電壓也會隨著我們調整調變電流而變化,假設輸出調變電 流Io變小時,輸出點Vo電壓隨著上升,接著主動式終端匹配電路之電晶體Ma1 閘極直流 偏壓也透過電阻Rg跨壓減小而上升,結果就是Ma1 電導隨著變化並且因此偏離我們所設 計的阻抗匹配狀態。為了要保持主動式終端匹配的狀態不隨調變電流而變,可以透過一 個補償的機制,使其變化量降低。 在此我們提供兩種補償機制並且做個比較,第一種的補償機制為直接提供一個補償 直流電流源Ic於Vg電壓點,如圖3-11(a),目的在於補償主動式終端匹配電路之偏壓驅動 電流Io/k的變化繼而保持通過Rg之直流電流不變,補償電流Ic之值可由分析算出(公式
3-12)。 k Z Ik V V I o o dc g dc o c − ⋅ − − = ) 1 ( ) ( ) (
(公式 3-12)
第二種較複雜之方法為採用直流回授控制迴圈來穩定偏壓電壓值,下圖 3-11(b)所示 為利用複製電路做直流回授控制的方法,透過大小為原本主動式終端匹配 1/r倍的複製 電路與 1/r倍主動式終端匹配電路所需偏壓電流來產生一個不受調變電流變化干擾的參 考電壓Vrefc,回授控制穩壓的機制動作為Vg點電壓經由低頻濾波器與一高增益低頻寬的 放大器作為比較器來比較Vg與Vrefc電壓,當Vg點變化時便透過直流電流源Mcm去回授控 制Vg,使Vg不受輸出點變化的影響並且讓主動式終端匹配阻抗Zin穩定在25 歐姆左右。 設計上所需考慮的是此控制迴圈為一直流電壓控制機制,為了不影響高頻阻抗匹配的效 果,其迴圈頻寬必須越低越好。此兩種方法的不同在於加入補償電流Ic之方法並未將輸 出端點電壓變動之影響考慮進去,因此穩定效果比控制迴路稍差,圖 3-12 為這兩種方 法與未加入直流穩壓電路的比較,由圖中資料分析可知當加入直流穩壓電路之後,其主 動式終端匹配阻抗被穩定控制在偏壓為25 歐姆左右,調變電流越小則影響越明顯。 (a) (b) 圖 3-11 直流穩壓電路圖圖 3-12 加入直流穩壓電路對於阻抗匹配的影響
3-4-3 高速電路頻寬擴增技巧
在傳輸資料速率超過10-Gb/s 的金氧半製程雷射二極體驅動器設計上,通常會使用
頻寬擴增技巧(Bandwidth Enhanced Technique)來補償電路中寄生電容造成的極點,以期 可以增加電路頻寬與降低電路的功率消耗,特別是前級驅動電路的設計,為了能夠保持 大輸出擺幅去切換輸出級,利用頻寬擴增技巧來降低所需的偏壓電流是目前很常見的設
計技巧。近幾年來高速電路常用的頻寬擴增技巧如表 3-1 所示,共有基本的 shunt
peaking[17]、負電容、採用雙埠電感網路來做頻寬擴增的 TRA[18]以及使用互感的 T-coil[19]與 Shunt and double series peaking[20]等。在這次的電路設計中,我們只採用 shunt peaking 來做頻寬擴增,雖然 shunt peaking 並非具有最好的擴增係數(Enhanced Factor),但以我們目前所用的 0.18μm 製程與 10-Gb/s 設計目標來考量,shunt peaking 為一個最易實現且足夠用的技巧,同時設計上對於電路輸出端反射損失的影響也最小。
Technique
Bandwidth Enhanced factor
NIC (negative impedance
converter)
1.4X
Shunt peaking
1.7X (maximally flat
frequency response)
TRA (triple- resonance
architecture)
3.5X
T-Coil peaking
2.7X (uniform group delay)
Shunt and double -series
peaking
3.23X(maximally flat
frequency response)
表 3-1 常用的頻寬擴增技巧效果比較表 接著我們將說明此次設計電路上所用到之頻寬擴增技巧的分析,shunt peaking實現 的方法如圖3-13,其RLC網路阻抗可表示成公式 3-13,由原先的單一極點 1/RCL轉換為 一個零點與兩個極點的頻率響應阻抗,當零點與較低之極點接近時,零點補償極點使得 頻寬擴增至第二個較高之極點,但若零點低於極點則會造成過衝現象,因此我們可以將 其頻率響應參數化作為設計電感值之參考標準,公式3-14 為RC與L/R時間常數的比值, 公式3-15 則是有加shunt peaking擴增之後的頻寬與原先頻寬之比值,用來表示頻寬擴增 係數,在設計所需之shunt peaking時,就如同表 3-3 所示,可由m定義出電感之值與頻寬 擴增的效果。 圖 3-13 shunt peaking 與其交流小信號模型[
]
1 1 ) / ( ) 1 ( || ) ( 2 + + + = + = sRC LC s R L s R sC R sL s Z(公式 3-13)
R L RC m / =(公式 3-14)
2 2 2 2 1 2 1 2 1 2 m m m m m + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + + − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + + − = ω ω
(公式 3-15)
Conditions m Bandwidth
Improvement
Overshoot
Max Bandwidth
1.41
85% 20%
Maximally Flat
2.41
72%
-
Best Group Delay
3.1
60%
-
No Shunt Peaking
∞ -
-
表 3-2 shunt peaking 效果整理 接著我們可以發現主動式終端匹配電路對於輸出端造成的影響如圖 3-14 與 3-15 所 示,主動式終端匹配電路電晶體Ma的寄生電容Cgd和Cgs在電路輸出端會與Rg產生兩個極 點與一個零點(公式 3-16~3-19),Gm1、Gm2 分別為輸出級與主動式終端匹配偏壓驅動電 路之電導,其中第一個零點與極點接近而互相抵消效應,為了防止第二個極點頻率過低 而降低輸出信號頻寬,我們在Rg與輸出端串連一電感Lg做為shunt peaking額外產生一個 零點來補償極點(公式 3-20),但我們額外由輸出端阻抗Za之分析可知道Lg所產生之零點 也會讓反射損失變差,所以我們同時透過在主動式終端匹配驅動偏壓電路上加入Cs作為 雙重補償(公式 3-21),藉此降低Lg所需之值並保持相同的頻寬擴增效果。(a) (b) 圖3-14 輸出級與主動式終端匹配電路與分析圖 M s
(公式 3-16)
M m M m(公式 3-17)
(公式 3-18)
(公式 3-19)
R gm ⋅ + 4 2 gm G G = = ) 7 ( ) ( 2 ) ( 1 , gm 6 2 7 gs Ma ds g gd g gd g sC s Z R =7 1 =17 → ( = 1 gm R s Z ⋅ Ω Ω + = = 7 . 0 ) 5 . , 5 . ) ( || ) ( 2 ) 1 ( 1 R 1 R sC sC 1 L g gd gs L gs g gd g gs g gd m m g gs m m m L m m m pi o R R C C s R C s ( )] 1+ C R + + C R + R C G G R C G s G G R s Z s Z s Z G s Z G s Z G V I ) 7 . 0 ( 7 . 0 ) 7 . 0 [( ] ) ( ) 7 . 0 ( [ ) ( ) ( ) ( ) ( ) ( ) ( 2 2 1 1 2 1 2 1 2 2 2 1 1 1 − + + − = + + − + = C C C R R R G G if m1 >> m2 , g =16 L =16 , gs =2 gd =2 75 . 1 0 , 026 . 2 1 1 z p p = = = →ω
ω
ω
RC RC圖3-15 輸出級頻率響應分析圖
(公式 3-20)
s + sR +1 ) 1 ( ) ( 2 1 + gd g gd g g g g C C L L s R s(公式 3-21)
gm 7 R +2 +2 2 ) 1 ( ) ( ) ( ) 7 ( 2 ⋅ + = s C R s C R gm s G s s s M s s M m 雙重頻寬擴增的優點我們由圖 3-16 之模擬可以得知在相同輸出信號眼圖情形下, 加入Cs一起作補償可以降低原本補償所需的Lg電感值 6.8nH到 3.7nH以保持較好的高頻 阻抗匹配效果。 = R ZWithout bandwidth enhancement Output stage With Lg=3.7nH, Cs=0.12pF
Output stage Without Cs , Lg=6.8nH
圖 3-16 主動式終端匹配電路頻寬擴增技巧比較圖 3-4-4 前置放大器電路的設計 設計完輸出級與主動式終端匹配電路之後,接著便是前置放大器電路的設計,前置 放大器電路主要分為兩級,第一級為輸入級,其功能為匹配輸入信號傳輸線阻抗 50 歐 姆並同時放大較小的輸入信號到足夠切換前級驅動器的信號擺幅,第二級則是前級驅動 器,其功能類似緩衝器去推動大輸入負載電容的輸出級,設計上最主要考量的是輸出信 號擺幅要足夠去切換下一級的差動對,同時保持電路頻寬維持輸出信號的品質,為了產 生所需要的輸出電壓擺幅,勢必面臨到負載電阻與偏壓電流的取捨,許多高速雷射二極 體驅動器且大輸出電流的前置放大器設計都會用到頻寬擴增技巧來減少功率消耗,在這 次的設計我們只使用shunt peaking的技巧來補償頻寬,圖 3-17 為加入shunt peaking之後
的驅動電路輸出調變電流信號與頻率響應的模擬圖,達到 10-Gb/s電路頻寬所需之頻率
補償電感值分別為前級驅動器0.9nH,輸入級 0.7nH,可讓整體電路頻寬擴增約 2.7 倍,
其餘設計的結果為輸入級差動對直流偏壓在1.2V,輸入電壓設計在單端擺幅 600mVpp,
Without shunt peaking With shunt peaking
圖 3-17 前置放大器頻寬補償輸出信號眼圖與頻率響應模擬圖
3-5 電路佈局
3-5-1 電感的實現
電感的實現方法在現今多金屬層製程下,包含了平面螺旋電感、對稱差動電感、堆 疊電感、互感等,其中使用堆疊螺旋電感(Stack Spiral Inductor)是常用來作為減少面積、
降低晶片成本的實現方法,如圖3-18(a)。基於這次電路中電感應用方面為不需要 High Q 電感的shunt peaking,加上主動式終端匹配電路部份若使用台積電所提供之電感元件會 造成佈局上走線過長和電路佈局上的不易,所以我們在此使用自行設計的堆疊電感去同 時滿足頻寬擴增、面積減小與保持電路效能的好處,由於所使用的TSMC 0.18μm CMOS 製程所能使用的金屬層為6 層,為了讓所設計的電感可以應用於 10-Gb/s 寬頻電路中, 須 注 意 的 參 數 有 線 寬 、 內 徑 、 使 用 的 層 數 等 , 設 計 上 必 須 限 制 使 用 的 層 數 在 metal6(M6)~metal3(M3),讓電感之共振頻率不致太低而無法應用。 設 計 的 流 程 則 是 選 定 我 們 需 要 的 電 感 值 3.7nH 之 後 , 再 使 用 Agilent Design
System(ADS) momentum做 2.5D的電磁模擬來決定內徑為 18μm、線距 1.5μm,方向是 由M6 由外向內做螺旋順時針繞 3 圈之後經由大量Vias接起M5,M5 則是由內向外做順
時針螺旋繞3 圈再接上M4,同理M4 與M3 都是 3 圈,最後總體電感是 12 圈來符合我們
要的電感值,為了能夠萃取出模型加入H-SPICE作時域上的電路模擬,我們採用圖 3-18(b) 中之電感模型[21],Rs和Ls分別代表電感的串聯電阻與串聯電感,Cp則表示相臨金屬繞 線間的耦合電容,Cox1和Cox2為金屬繞線與矽基板間之寄生電容,Rsub1、Rsub2、Csub1、Csub2 為與基板損耗及頻率有關之寄生參數。
圖 3-18 堆疊螺旋電感
萃取模型內參數值的方法如下: 將埠二P2 接地,由單埠輸入阻抗(one port input impedance, Zin)在極低頻率時的實部萃取Rs,虛部萃取Ls ,Rsub1則是實部最大值,並由 導納(admittance)Y21 在其fsr處依公式 3-22~3-24 算出Cp,Csub利用Zin發生自我共振時的
電容值條件與公式3-25 計算可得到,接下來我們可利用ADS模擬堆疊電感Q值與模型做
配適(fitting)找出Cox之值,同樣的,當改以P1 接地時即可找出另一邊寄生參數之值,以 上就是我們使用ADS萃取電感模型的方法。
Rs =real(Zin)dc ,Rsub =real(Zin)max
(公式 3-22)
Ls=imag(Zin)dc/2
π
f(公式 3-23)
C f L fsr self resonancefrequencys sr p , : ) 2 ( 1 2⋅ − = π
(公式 3-24)
Csub =Cf −Cp ,Cf =[Ls /(Rs +(ω
sr2Ls2))](公式 3-25)
對於前置放大器差動對所需要用到較小之電感,我們在供應電壓端共模點的考量 下,採用台積電設計套件(Design kit)所提供的八角型對稱差動電感(圖 3-19),可以讓電 路整體供應電壓的佈局上較為理想。 圖 3-19 八角型對稱差動電感 3-5-2 佈局考量 電路佈局上需要考慮走線的高頻電感電容效應、電源供應的安排以及差動對佈局上 的對稱性,必要時需加上去耦合電容(decoupling capacitance)做晶片內部直流電壓濾雜訊 的動作,Calibre LPE 無法分析到的部份我們利用 ADS 的 EM simulator 模擬走線的高頻
電容電感效應,並萃取成多階RLC 網路 SPICE Model 加入後模擬來分析走線效應的影 響,元件擺放的位置的部份則是從輸入端開始依序為差動輸入端銲墊(Bonding pad)、輸 入端之晶片內匹配電阻、輸入級、前級驅動器、輸出級以及主動式終端匹配電路。 晶片內部包含兩個面積較大的電感,因此級與級之間的走線高頻效應是擺放位置的 準則,設計時考量到雷射二極體電路主動式終端匹配的效能對於輸出端走線電感效應、 磅線效應非常敏感,所以安排上讓輸出級非常接近輸出端銲墊以減少效能的降低,再來 才是前級驅動器與的輸入級佈局安排,這一個部分我們利用模擬來決定擺放的位置,首 先將前級驅動器與輸出級之間或輸入級與前級驅動器之間加入約0.1nH 的電感來模擬長 走線效應加入後的反射損失,結果如圖 3-20 所示,電路輸出端之反射損失對於輸出級 與前級驅動器間的走線效應較為敏感,其原因為輸出端透過輸出級的寄生電容可以看見 走線的電感效應,使得輸出端阻抗上升,因此在電路方塊的安排上,我們必須盡量縮短 輸出級與前級驅動器的走線來保持較好的反射損失。
圖3-20 佈局走線效應模擬結果(對反射損失的影響) 輸入級與前級驅動器供應電壓部份分為 2 組,主要是考量到供應電壓到內部各供應 電壓節點的佈局效應,另外,我們在各直流偏壓點加上模擬時考量的適當大小反耦合電 容來確保各直流電壓點的穩定。最後金屬走線時為了使面積能夠更有效利用並且同時滿 足電流密度規範,許多地方使用多層金屬加上大量Vias 做堆疊走線,最重要的地端(Gnd) 則是盡量在不影響信號情況下佈局於內部並且以Power-ring 形式維持內部地的穩定,模 擬時注意到磅線效應會影響主動式終端匹配效果的電路端點都使用多個銲點來降低電 感效應。圖 3-21 為此次所設計之雷射二極體驅動器佈局平面圖,電路佈局面積為 0.76mm×0.61mm。
圖3-21 電路佈局平面圖
3-6 模擬結果與分析
模擬結果主要著重兩個部份,一為輸出信號眼圖,另一個則是反射損失,時域模 擬部分我們所輸入的信號為10-Gb/s 600mV(p-p) K28.5 non-return-to-zero(NRZ) PRBS 差
動對信號,大小剛好足夠電路完全切換並透過25 歐姆傳輸線輸出電流去驅動 25 歐姆負
載,反射損失部分則是利用Agilent ADS simulator 模擬雷射二極體輸出端匹配 25 歐姆特 性阻抗時S22 的情況,模擬時我們加入佈局萃取出來的走線高頻RLC效應去做後模擬, 以下之模擬結果依序為考量磅線效應、溫度製程和不同輸出調變電流下對電路特性的影 響。 圖 3-22 為不同長度磅線效應下輸出信號眼圖與反射損失模擬結果,所模擬的值由 不包含磅線電感到1nH 電感值,從圖中可看出輸出端反射損失對於磅線電感非常敏感, 而輸出端之磅線電感會產生一個約在5GHz 的共振點,共振頻率會隨著電感值不同而變 動,使得 10GHz 的反射損失受到影響,因此在設計與佈局時我們就必須加入磅線效應 做設計上的考量,並且盡量透過佈局讓實際的磅線電感值可以小於1nH,才不致讓反射