國 立 交 通 大 學
土 木 工 程 學 系
碩 士 論 文
以波形堆疊法進行空載波形光達資料之
地面微弱回波訊號萃取
The Extraction of Weak Laser Pulses from Airborne
Waveform Lidar Data using Waveform Stacking Method
研 究 生:葉宛宜
指導教授:張智安
以波形堆疊法進行空載波形光達資料之
地面微弱回波訊號萃取
The Extraction of Weak Laser Pulses from Airborne Waveform
Lidar Data using Waveform Stacking Method
研 究 生:葉宛宜
Student:Wan-Yi Yeh
指導教授:張智安
Advisor:Tee-Ann Teo
國 立 交 通 大 學
土 木 工 程 學 系
碩 士 論 文
A ThesisSubmitted to Department of Civil Engineering
College of Engineering
National Chiao Tung University
in partial Fulfillment of the Requirements
for the Degree of
Master
in
Civil Engineering
July 2013
Hsinchu, Taiwan, Republic of China
以波形堆疊法進行空載波形光達資料之
地面微弱回波訊號萃取
學生:葉宛宜 指導教授:張智安
國立交通大學土木工程學系
中文摘要
全波形光達可快速的獲得大量地面三維點坐標,並紀錄完整波形訊號。相較於離散 點光達,全波形光達透過後處理,可萃取更精確且豐富的地表物資訊。以往利用波形進 行地面點萃取,使用一維波形分析方法。但當地面點受地物遮蔽,產生微弱回波訊號時, 此訊號接近背景雜訊值,難以使用一維波形分析方法萃取出此訊號且容易求解發散。光 達為連續性掃描,鄰近波形間具有空間相關性,以往僅分析單一波形,缺乏考量波形間 之空間相關性,以萃取地表物三維坐標。本研究欲考量鄰近波形間之空間關聯性及地表 連續性,經波形對位與疊合,萃取微弱地面回波訊號。 本研究目的為結合一維波形分析方法及波形堆疊法進行地面微弱回波萃取,分析波 形間空間關聯性。研究方法共分為三部分,首先,使用高斯分解法進行單一回波訊號分 析,高斯分解法求解步驟為雜訊濾除、初始值給定及高斯擬合;接著,選取鄰近波形, 並進行波形對位與疊合,增顯地面微弱回波訊號;最後,使用高斯分解法擬合堆疊波形, 萃取微弱地面點訊號。研究中,就測區之植物覆蓋程度、波形間之取樣距離、及不同波 形取樣數進行成果分析及視覺化展示。使用資料分別為 Leica ALS60、Riegl Q680i 及 Optech Pegasus,測區位置為台灣那 瑪夏區。因 Leica ALS60 波形取樣數較多、紀錄資訊較豐富,紀錄長度約為 38.5 公尺, 因此森林區萃取成果主要使用 Leica ALS60 之資料進行分析;Riegl Q680i 及 Optech Pegasus 資料用於不同波形取用數分析。成果顯示,植物覆蓋程度影響資料穿透率,當 穿透率越高時,萃取正確率越高且增加點數量越多。分析不同波形取樣距離,當取樣距
離越大時,波形間空間關係越弱,則萃取正確率降低。最後,當波形取樣數減少時,可 記錄之空間距離降低,當測區樹木高度太高時,單一波形無法同時記錄樹頂及地面資訊, 則不適用於波形堆疊法。
The Extraction of Weak Laser Pulses from Airborne Waveform
Lidar Data using Waveform Stacking Method
Student:Wan-Yi Yeh Advisor:Tee-Ann Teo
Department of Civil Engineering
National Chiao Tung University
Abstract
Airborne lidar is an advanced technology which can obtain three-dimensional coordinates and intensity value of ground objects efficiently. As technology developed, comparing with discrete lidar, full-waveform lidar records entire backscattered signal. Waveform analysis is to extract more information using offline processing. Traditionally, the received waveform is analyzed by 1-D waveform analysis method. However, the weak laser pulse is produced because of the dense tree coverage and the return signal is closer to background noise. The weak laser pulse is undetected using traditionally 1-D waveform analysis method. To overcome the over parameterizations of the waveform analysis method, this research combines Gaussian decomposition and waveform stacking methods by considering the geospatial relationship between adjacent waveforms.
The proposed methods contain three major works. First, we utilize Gaussian decomposition to analyze every single received waveform. Gaussian decomposition is used to extract waveform attributes including peak, echo width, amplitude, return number, etc. Data smoothing, initialization and Gaussian fitting are the three major steps in Gaussian decomposition. Second, considering geospatial relationship between sequential waveforms, we align and stack adjacent waveforms to the related location for augmenting the weak signal. Finally, the stacked waveform is analyzed by Gaussian decomposition method and the information of weak return of the ground is extracted.
The experimental data are acquired by Leica ALS60, Optech Pegasus and Riegl Q680i. The test area is located in the middle part of Taiwan. The experimental result indicates that when considering the geospatial relationships, the proposed method extract the weak returns on the ground successfully. The correctness and increasing rate of the extracted ground point is related to the vegetated coverage such as complexity and the dense of ground points. The increasing of sampling distances of adjacent waveforms reduces the correctness. Moreover, the number of sampling also affects the recorded length of signal. More samples produce more reliable results.
Keyword: Full-waveform lidar, Waveform analysis, Gaussian decomposition, Waveform stacking, Waveform Alignment
致謝
從生活了四年的台南成大,回到了有我最愛的家人與朋友的新竹攻讀研究所,交大 是個陌生的環境,卻讓我遇到了很棒的人、事、物。終於研究所生涯即將告一段落,兩 年的生活中充滿著挑戰與磨練,其中需要感謝的人很多。首先謝謝我的指導教授張智安 老師,老師的悉心教導讓我在專業領域更加精進,更訓練我的做事態度及給予挑戰,並 在研究遇到瓶頸時給予幫助與鼓勵,讓我能夠順利完成論文。此外,謝謝史老師與黃老 師於課業上的教導及於日常生活中的關懷,並謝謝口試委員王驥魁與王聖鐸老師於論文 上的建議與指正,使這本論文能夠更完整。 接著,謝謝我兩年的同窗以諾,雖然我講話總是比較直接,但是我相信你不會介意 的;謝謝大任在繁忙之餘仍然記得上來四樓和我聊聊天,說說屁話;謝謝胖總是讓我覺 得很開心;謝謝俊銘與健輝在課業上的幫助,你們兩個真的很優秀;謝謝張朔總是讓我 欺壓並給我很多幫助。此外,謝謝暐尊給我很多學術上的幫助,並不厭其煩的回答我問 題;謝謝升哥讓我有動力走下二樓活動筋骨,希望你別再欺負學弟妹了;謝謝阿堂、阿 猴、冠勳讓研究室充滿活力與衝勁;謝謝坤原、書涵、鎔壑和弋丞讓測量組充滿活力。 最後,謝謝我的爸媽做我的後盾,並給我滿滿的愛與包容,讓我能夠順利的完成論 文。謝謝大姊、二姊和弟弟的噓寒問暖,讓我在很晚回家時感到溫馨。謝謝我的好朋友 們,小包、小饒、葉樸、巧翎與阿胡,在我煩悶與低落的時候,陪我聊聊天、說說笑, 並和我分享你們生活中發生的事情。特別感謝葉樸和 Leo 在我去澳洲的時候收留我,但 請不要栽贓我是衰鬼后。謝謝阿喆總是在我遇到挫折給我鼓勵與力量,即使很忙、很累 也總是抽空陪我聊聊天。感謝這些日子裡曾給我鼓勵與幫助的人。在未來的日子裡,我 會繼續接受挑戰,朝著自己的目標前進。 宛宜 2013.9.17目錄
中文摘要 ... II Abstract ... IV 致謝 ... VI 目錄 ... VII 圖目錄 ... IX 第 1 章 前言 ... 1 1.1 研究背景 ... 1 1.2 研究動機 ... 3 1.3 研究目的 ... 4 1.4 論文架構 ... 5 第 2 章 全波形光達相關文獻 ... 6 2.1 全波形光達簡介 ... 6 2.1.1 全波形光達介紹 ... 6 2.1.2 全波形光達特點 ... 8 2.2 一維波形分析方法介紹 ... 10 2.3 波形堆疊方法介紹 ... 17 第 3 章 研究方法 ... 22 3.1 波形分析 ... 24 3.1.1 雜訊濾除 ... 24 3.1.2 初始值給定 ... 27 3.1.3 高斯分解法 ... 31 3.2 鄰近波形選取 ... 32 3.3 波形堆疊 ... 343.3.1 波形平移與堆疊 ... 34 3.3.2 微弱回波萃取 ... 37 3.4 精度評估 ... 39 第 4 章 研究資料 ... 40 4.1 測試資料一 ... 41 4.2 測試資料二 ... 43 4.3 測試資料三 ... 44 第 5 章 成果分析 ... 45 5.1 單一萃取成果分析 ... 45 5.2 整體萃取成果分析 ... 49 5.3 不同取樣距離成果分析 ... 57 5.4 不同取樣數成果分析 ... 64 5.5 入射角分析 ... 71 第 6 章 結論與建議 ... 73 6.1 結論 ... 73 6.2 建議 ... 74 參考文獻 ... 75
圖目錄
圖 1.1、空載光達系統 ... 2
圖 1.2、空載光達參數圖(Mallet and Bretar, 2009) ... 2
圖 1.3、三維視覺化展示(Persson et al., 2005) ... 3
圖 1.4、微弱回波示意圖 ... 4
圖 1.5、波形堆疊示意圖-1 ... 5
圖 2.1、足跡大小與包含地物比較圖(Mallet and Bretar, 2009) ... 7
圖 2.2、全波形光達資料紀錄(Wagner et al., 2004) ... 7
圖 2.3、地物與回波參數關係(Jutzi and Stilla, 2005) ... 8
圖 2.4、地物與回波參數關係(Mallet and Bretar, 2009) ... 9
圖 2.5、未經過波形與經過波形分析之成果比較圖(Mallet and Bretar, 2009) .. 10
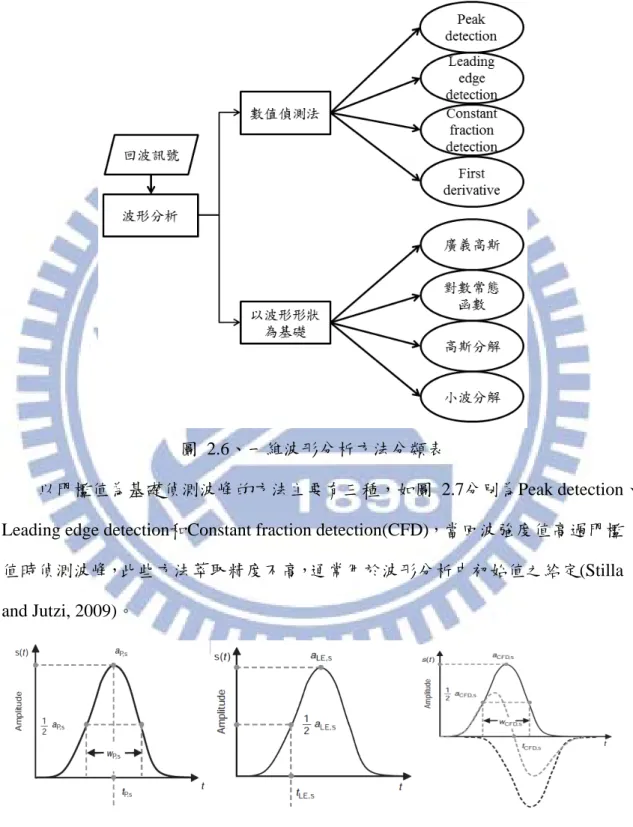
圖 2.6、一維波形分析方法分類表 ... 11
圖 2.7、左:Peak detection;中:Leading edge detection;右:CFD ... 11
圖 2.8、四方法偵測之波峰個數與位置(Toth et al, 2011) ... 12
圖 2.9、Spline 法成果(上為峰值偵測成果、下為二階階導數法成果) ... 13
圖 2.10、相鄰波形距離與波形分析關係(Wagner et al., 2006) ... 14
圖 2.11、左:高斯與對數常態分布、右: 廣義高斯分佈(Chauve et al., 2007). 15 圖 2.12、α參數對不同地物類別之曲線分布(Chauve et al., 2007) ... 16
圖 2.13、 沿 x 平面切割影像(Jutzi and Stilla, 2005) ... 17
圖 2.14、 線性特徵萃取成果(Jutzi and Stilla, 2005) ... 18
圖 2.15、沿著坡度進行波形堆疊示意圖(Yao et al., 2010) ... 19
圖 2.16、沿坡度進行波形堆疊之成果(Yao et al., 2010) ... 19
圖 2.17、波形堆疊情形範例(Magruder et al., 2010a) ... 20 圖 2.18、高程與最後回波個數直方圖,左:高斯分解法、右:波形堆疊法 . 20
圖 3.1、房屋點雲圖 ... 22 圖 3.2、研究流程圖 ... 23 圖 3.3、高斯平滑化 1(標準差為 1、罩窗大小為 5) ... 25 圖 3.4、高斯平滑化 2(標準差為 5、罩窗大小為 9) ... 25 圖 3.5、背景雜訊給定 ... 26 圖 3.6、數值 1給定示意圖 ... 26 圖 3.7、濾除背景雜訊成果 ... 27 圖 3.8、高斯分解法求解參數 ... 28 圖 3.9、原始局部最大極 ... 28 圖 3.10、去除太接近極值成果 ... 29 圖 3.11、去除靠近邊界極值成果 ... 29 圖 3.12、去除小於背景雜訊極值成果 ... 30 圖 3.13、初始半波寬示意圖 ... 30 圖 3.14、高斯分解法 ... 31 圖 3.15、鄰近波形選取示意圖 ... 32 圖 3.16、經時間排序後之相鄰波形 ... 33 圖 3.17、波形堆疊示意圖-2 ... 34 圖 3.18、錯誤連線示意圖 ... 36 圖 3.19、成功連線示意圖 ... 36 圖 3.20、波形對位前後比較圖 ... 37 圖 3.21、高斯分解萃取堆疊波形最後回波 ... 38 圖 3.22、重複萃取示意圖 ... 38 圖 3.23、錯誤萃取示意圖 ... 39 圖 4.1、測區位置(Imagery ©2013 TerraMetrics) ... 40 圖 4.2、測試資料一(Elevation) ... 41
圖 4.3、測試資料一之側視圖(Intensity) ... 42 圖 4.4、測試資料二之側視圖(elevation) ... 43 圖 4.5、測試資料三之側視圖(elevation) ... 44 圖 5.1、波形堆疊法堆疊過程與成果 ... 47 圖 5.2、萃取錯誤案例 ... 48 圖 5.3、回波訊號值統計直方圖 ... 50 圖 5.4、整體萃取成果地面點個數變化 ... 52 圖 5.5、成果展示剖面位置標示圖 ... 53 圖 5.6、測區一成果視覺展示 ... 54 圖 5.7、測區二成果視覺展示 ... 55 圖 5.8、測區三成果視覺展示 ... 56 圖 5.9、空間關係示意圖 ... 57 圖 5.10、空間關係與萃取正確率之變化趨勢 ... 58 圖 5.11、最後成果剖面標示圖 ... 60 圖 5.12、測區一最後成果 ... 61 圖 5.13、測區二最後成果 ... 62 圖 5.14、測區三最後成果 ... 63 圖 5.15、Leica 資料波形展示 ... 64 圖 5.16、Riegl 資料波形展示 ... 64 圖 5.17、Optech 資料波形展示 ... 65 圖 5.18、Optech 原始資料點雲展示側視圖 ... 65 圖 5.19、Riegl 及 Optech 資料萃取成果剖面位置標示圖 ... 68 圖 5.20、Riegl 萃取成果視覺化展示 ... 69 圖 5.21、Optech 萃取成果視覺化展示 ... 70 圖 5.22、入射角資料選取示意圖 ... 71
表目錄
表 2.1、上述五方法之萃取峰波個數(Toth et al., 2011) ... 14 表 4.1、三測區之區域 ... 40 表 5.1、波形堆疊法門檻值設定 ... 45 表 5.2、 2門檻值探討 ... 46 表 5.3、 3門檻值探討 ... 47 表 5.4、整體萃取成果增加點與正確率 ... 51 表 5.5、空間關係與萃取正確率 ... 58 表 5.6、結合成果之地面點增加數 ... 59 表 5.7、結合成果之地面點增加率 ... 59 表 5.8、Riegl 及 Optech 資料萃取成果 ... 66 表 5.9、不同取樣數成果比較 ... 68 表 5.10、掃描參數表 ... 71 表 5.11、入射角分析成果比較 ... 72第1章 前言
1.1 研究背景
空載光達(Airborne LiDAR, Light Detection And Ranging)為一主動式遙感探 測系統,特點為可快速且大量的取得地表三維資訊。空載光達掃描系統配置如圖 1.1所示,主要由三大元件構成,分別為雷射系統(Scanner)、全球衛星導航系統 (Global Navigation Satellite System, GNSS)及慣性量測單元(Inertial Measurement Unit, IMU)。量測原理為利用雷射脈衝進行掃描,取得掃描器與地表物之距離, 並利用GNSS及IMU進行直接地理定位,將距離資訊轉為三維點坐標,其三維點 稱為點雲(Point cloud)。 空載光達依資料存取方式可分為多重回波(Multi-echo Lidar)光達與全波形 (Full-waveform Lidar)光達。近年來,隨著科技及硬體儲存設備之演進,商業型全 波形光達系統於 2004 年問世,並逐漸普及化。相較於傳統多重回波光達系統僅 記錄多個回波資訊及反射值強度(Intensity),全波形光達可記錄完整之回波訊號, 使用者可利用回波訊號進行資料後處理,萃取地表之幾何(Geometric)資訊及物理 (Physical)資訊,有助於地表物的判釋與分類。多重回波光達紀錄之資訊為掃描時 即時(Real Time)萃取之反射能量大於門檻值的回波資訊,故其量測精度與資料豐 富性較全波形光達差。例如,在植物覆蓋之區域,全波形光達資料可萃取較多的 三維點雲,靠近地表之低矮植物可與地表物分離,且距離量測精度較佳並可獲得 地表物理資訊(Hug et al., 2004;Chauve et al., 2007)。
波形分析為全波形光達資料處理的首要步驟,使用者進行一維波形分析,選 擇適合之波形擬合參數,求得回波之波形資訊,例如距離、回波寬度、回波強度、 峰值個數等等,並可分析地物垂直方向之結構(圖 1.2)。波形分析主要的方法包 含Peak thresholding、Zero-crossing of first derivative、重心偵測法(Center of Gravity Detection)、高斯分解法(Gaussian Decomposition)、小波法(Wavelet approach)和
Spline等等(Toth et al., 2011; Stilla and Jutzi, 2009),其中,高斯分解法最為廣泛使用
(Chauve et al., 2007)。
圖 1.1、空載光達系統 (Fugro EarthData, Inc.)
波形分析中,一維訊號分析主要針對單一波形進行波形特徵萃取,而未考慮 波形間之空間關聯性。由於光達為連續性掃描,故相鄰波形間應有空間關聯性, 如圖 1.3,Persson et al. (2005)將回波資訊三維網格化展示,由視覺化判斷可看出 鄰近回波具有空間之連續性與相關性。 圖 1.3、三維視覺化展示(Persson et al., 2005)
1.2 研究動機
全波形光達的優點為透過波形分析豐富地表資訊,故本研究偵測微弱回波訊 號增加森林區地面點資訊。森林區域地形相較於平地區域地形起伏較大且破碎, 故需要較豐富的地面點構建地表資訊,地面點萃取有兩大重要性:(1)地面點萃 取可幫助地表重建,越豐富的地表資訊可製作資訊越正確的數值地形模型 (Digital Terrain Model, DTM)(Magrude ;(2)利 數值地表模型(Digital Surface Model, DSM)製作樹冠高度模型 (Canr et al., 2010b and Mücke et al., 2010) 用數值地形模型與
opy Height Model, CHM),可幫助判斷森林區之樹高、樹種等資訊,便於森 林區物種重建(Chauve et al, 2008)。然而,光達雷射脈衝掃描至植物覆蓋區域時, 部分區域因植物遮蔽,雷射脈衝僅部分穿透至地面取得地表資訊,以致地表判釋 困難。如圖 1.4所示,此回波訊號第一回波位置地表物為樹頂,回波訊號較強烈, 而其餘回波相對而言回波訊號較弱;橘色圓圈標示區域為地表微弱回波位置,其 回波訊號接近背景雜訊。以往波形分析方法進行微弱回波偵測時,因回波訊號接
近背景雜訊,若欲萃取微弱回波峰值,則易產生過度參數化的情形,導致雜訊的 萃取率增高及求解發散。本研究之研究動機為利用波形之空間關聯性,配合回波 之時間序列選取並疊合鄰近波形,以萃取地表微弱回波訊號。透過波形分析及波 形堆疊法(Waveform Stacking)進行峰值偵測,於植物覆蓋區萃取更豐富之地表資 訊,以幫助地表重建和判釋及後續應用。 圖 1.4、微弱回波示意圖
1.3 研究目的
此研究之目的為結合一維波形分析及波形堆疊法,考慮鄰近波形兼具有空間 相關性,透過疊合鄰近波形增強地面回波訊號,進行地面微弱回波偵測。其中, 鄰近波形意指透過時間序列選取同一掃描線上之相鄰波形。圖 1.5為波形堆疊示 意圖,三角形為透過一維波形分析方法得到之峰值位置,圖中綠色波形在橘色箭 頭指向處有一微弱地面回波,使用一維波形分析法無法萃取得到。故利用波形堆 紅色與藍色波形,增強地面微弱回波訊號,以萃取地面點。此 研究 疊的概念疊合鄰近 並針對不同的植物覆蓋濃密程度進行測試,分析高斯分解法配合波形堆疊法 進行微弱回波偵測之優點與缺點。本研究分為兩個步驟,波形分解與波形堆疊。 在波形分解步驟中,針對單一波形利用高斯分解法進行波形特徵萃取,爾後考慮 鄰近波形空間關聯性進行波形堆疊,增強地面微弱回波訊號進行萃取。本研究亦欲比較多重回波光達、高斯分解法與波形堆疊法之峰值萃取成果,分析波形堆疊 之萃取成效,並探討波形取樣距離、波形取樣數及入射角的不同是否影響波形堆 疊法的成效。本研究之貢獻與創新在於結合鄰近波形資訊,考量波形間之空間關 係,並將波形依相對位置對位與疊合,進行空間整合分析。以往使用全波形光達 資料進行地物資訊萃取,僅考慮單一波形進行一維波形分析。然而結合單一波形 分析與鄰近波形疊合,可考量地物於空間中的關係,進行有效的微弱地面回波萃 取、豐富地表資訊,並避免一維波形分析過程中常見之過度參數化及求解發散情 形。 圖 1.5、波形堆疊示意圖-1
1.4 論文架構
第一章:說明研究背景、動機與目的。 第二章:文獻回顧,內容包含全波形光達之特點、波形萃取之方法與波形堆疊法。 第三章:介紹研究方法,包含波形分析及波形堆疊。 第四章:研究資料介紹,依植物覆蓋濃密程度分為三個測區,分別為稀疏、一般 與濃密。 展示與分析。 第五章:實驗成果 第六章:本研究之結論與建議。第2章 全波形光達相關文獻
2.1 全波形光達簡介
形光達介紹
全波形光達首先發展於 1980 年代,其應用於海洋測深之空載系統,而首先 應用於地形偵測之光達於 1999 年開始執行任務。將全波形光達以足跡(footprint) 大小區分,大足跡光達其足跡大小可為數公尺至 100 公尺,小足跡光達足跡大小 小於 1 公尺。如圖 2.1所示,大足跡光達通常為實驗光達,應用於森林及生態研 究,掃描器乘載於衛星載具或高航高之空載系統,因足跡大故單一回波內包含多 種地物,波形複雜;小足跡光達通常為商業形全波形系統,因其足跡小,故單一 回波包含地物較單純,故足跡內通常僅包含單種地物,可用於分辨地物於垂直距 離上之結構變化,且波形組成較簡單,容易進行波形分解與判釋,且其掃描精度 亦較高(Mallet and Bretar, 2009)。大足跡全波形系統有GLAS(Geoscience LaserAltimeter System)、Caliop(Cloud-Aerosol LiDAR with Orthogonal Polarization)、 LVIS(Laser Vegetation Imaging Sensor) 和 SLICER(Scanning LiDAR Imager of Canopies by Echo Recovery)(Wagner et al, 2006; Chauve et al., 2007)。GLAS和 Caliop為衛星系統,GLAS主要用途為監測極區冰原變化,Caliop應用於雲層與氣 膠監測。LVIS和SLICER為空載系統,主要用途為量測植被覆蓋區之垂直高度與 結 構 。 小 足 跡 全 波 形 光 達 包 含 SHOALS(Scanning Hydrographic Operational Airborne Lidar Survey)、Leica、Opetch和Riegl等等(Stilla and Jutzi, 2009)。SHOLAS 主要應用於量測與監控近岸水深與環境,Leica、Opetch和Riegl系統為商業形全 波形光達系統,應用於陸域地形測量,因其掃描頻率高、足跡小且記錄波形資訊, 故可得到豐富的地表資訊,已廣泛應用於地形測量。
圖 2.1、足跡大小與包含地物比較圖(Mallet and Bretar, 2009) 全波形光達紀錄雷射波行進中隨時間變化的強度值,這些強度值組成之訊號 即稱為波形。由於硬體設備的限制,為不儲存多餘的回波訊號造成記硬體內記憶 體及資料儲存效能的負擔,部份全波形光達僅記錄靠近地表物之波形。全波形光 達將回波訊號數位化,以固定距離 1-10 ns為間隔記錄回波強度值。相較於多重 回波光達僅記錄超過門檻值之回波訊號,全波形光達可進行資料後處理,得到較 豐富幾何及物理資訊,如圖 2.2所示。TopEye MarkII、Leica ALS60 及TopoSys SLTM可分別記錄 128 組、256 組及 440 組回波訊號。
2.1.2 全波形光達特點
不同於多重回波光達僅記錄超過門檻值的資訊,全波形光達記錄回波波形, 使用者可以利用波形分析方法進行資料後處理。透過資料後處理,可將回波資訊 轉換為回波參數,例如波寬、振幅和回波位置等等,且透過相較多重回波光達離 散資訊複雜的波形擬合函數進行波峰萃取,可得較高精度的回波位置參數。波形 分析處理可成功分離矮樹木與地面點,且透過波形分析萃取出的增加點多半於樹 冠及地面位置 物之物理性質,供後續分類、特徵萃取等等之用 。此外,多重回波光達紀錄三維離散點資訊,而全波形光達紀錄連續之波 形,故可透過分析單一波形之垂直方向變化或考慮鄰近波形之關係,判斷地物的 結構與種類。如圖 ,當雷射波掃描至不同地物時,產生的回波形狀也不盡相 同。當回波掃描至平坦地時,回波振幅較強烈且只有單一回波;當回波掃描至傾 斜地表時,振幅減弱且波寬增大。而當回波掃描至不同高度之物體時,圖 2.3、地物與回波參數關係(Jutzi and Stilla, 2005)
圖 2.4分別展示建築物、草地、道路及樹木之振幅與波寬分布直方圖,由此 些分布可分析出樹木的波寬分布較建物離散,且振幅相較之下高 草地振幅相對 其他三種地物小且波寬分布較集中。由以上可得知,根據振幅與波寬,可得到回 波的物理性質資訊,並進行分類與判釋。
,可以豐富地表資訊並提高點密度,更可以透過波形參數得到地表 (Chauve et al., 2007; Hug et al., 2004)
2.3
兩回波之 間的距離不同,波形堆疊情形也不同。
圖 2.4、地物與回波參數關係(Mallet and Bretar, 2009)
總結上述,全波形光達和多重回波光達相比有四大優點:(1)透過數學模式 進行波形擬合,改善垂直方向資訊豐富度(Duong et al., 2008);(2)有效增加點密 度,尤其於較接近地表範圍效果更顯著,接近地面位置可增加約 40%至 60%的 點,並使 DTM 及 CHM 減小五公分的偏差且精度提高(Hug et al., 2004; Chauve et al., 2008);(3)提高距離量測精度,用於環境變化監測,例如海平面、雪山高度監 測等等(Zwally et al., 2002);(4)提供三維點雲之外的波形參數,提升地表判釋與 分類之精度(林郁珊,2012)。
2.2 一維波形分析方法介紹
波形分析為全波形光達資料處理中極重要的步驟,透過資料後處理進可萃取 出相較於多重回波光達更豐富且更精確之三維資訊。回波形態主要可分成三種, 分別為明顯回波、疊置回波(overlapped return)與微弱回波,明顯回波相較之下較 易萃取正確;疊置回波因組成複雜,故需使用較複雜之演算法進行萃取:微弱回 波因為容易和背景雜訊混淆,故萃取困難。波形分析有兩個主要的發展方向,分 別為疊置波形與微弱回波偵測。地物單純的區域萃取之峰值成果和多重回波光達 並不會有太大的差異,但是在地物複雜之區域波形疊置情況嚴重,且因遮蔽問題 易產生微弱回波 置且太靠近之回波情況,而導致地物三維點之密度與精度受到影響。 如圖 2.5所示,垂直線為未經波形擬合萃取之峰值位置 交叉點為經波形擬 合萃取之峰值位置。圖(左)中因波形前端疊置,故未經波形擬合之資料僅萃取出 一個峰值 右)中因後兩個回波為微弱回波,故未經波形擬合則無法偵測到回 (Mallet and Bretar, 2009)。回波疊置與微 弱回波偵測為波形分析之兩大重點,但若過度萃取易產生錯誤的峰值萃取成果, 增加雜訊。圖 2.5、未經過波形與經過波形分析之成果比較圖(Mallet and Bretar, 2009) 透過波形分析可萃取複雜的地表資訊,並提供物理及幾何之資訊。峰值萃取 的方法攸關三維點之精度與點密度,故眾多文獻比較不同的萃取方法的成效,以 。多重回波光達因為偵測波峰之方法較為簡易,故不容易分辨疊 、 ;圖( 波,但透過波形擬合後可成功萃取資訊
萃取更豐富之地面點與改善萃取精度,並應用於地表判釋與分類。一維波形分析 方法眾多,圖 2.6將方法分為兩類於以下討論,分別為數值偵測法及以波形形狀 為基礎之分析法。
圖 、一維波形分析方法分類表
以門檻值為基礎偵測波峰的方法主要有三種,如圖 分別為 、 和Constant fraction detection(CFD),當回波強度值高過門檻 值時偵測波峰,此些方法萃取精度不高,通常用於波形分析中初始值之給定(Stilla and Jutzi, 2009)。
圖 2.7、左:Peak detection;中:Leading edge detection;右:CFD
(Stilla and Jutzi, 2009) 2.6
2.7 Peak detection Leading edge detection
Toth et al.(2011)比較五種波形分析方法和線上(Onboard)處理取得之波峰資 料的萃取成效,由簡單至複雜分別為門檻值偵測(Peak thresholding)、一階導數法 (First derivative)、小波法(Wavelet approach)、Spline 及高斯分解法。
一階導數法(First derivative)將波形進行一次微分,為利用數學模式找尋區域 極值最簡單的方法。此方法受到雜訊影響大,雜訊濾除的數值給定為重要關鍵, 且此方法不易偵測出疊置波形的完整波峰數。小波法(Wavelet approach)利用小波 函數進行波形分解,透過不同等級(level)小波分解波形,越高等級的小波轉換可 得到更精確的擬合,但相對來說也容易受雜訊干擾,此方法和一階導數法相似, 其優點為方法中可直接進行雜訊濾除(Toth et al., 2011)。此外,Wang et al.(2011) 利 用 小 波 轉 換 進 行 波 峰 數 量 給 定 後 , 將 其 應 用 於 高 斯 分 解 法 與 對 數 常 態 (Lognormal)函數模型中進行波形分析,此方法證實利用小波轉換可得到較正確 的波峰個數給定,用於初始值的給定萃取效果佳。 根據上述由簡至難的波形分析法成果觀察得知,較複雜的演算法可得到較正 確的波形分析成果,如圖 2.8左顯示peak detection偵測之波峰個數為 3 個、一階 導數法為 3 個、小波法為 右顯示 偵測之波峰個數為 3 個、一階導數法為 個、小波法為 個。但如圖 右所示 上述四方法仍無法 圖 2.8、四方法偵測之波峰個數與位置(Toth et 4 個,圖 2.8 peak detection 4 4 2.8 , 有效的偵測疊置回波之波峰位置。 al, 2011)
Spline法首先利用立方曲線將資料平滑化,接著利用二階導數法搜尋曲度 (curvature)最小值偵測峰位置,此方法為一階導數法之改良。圖 2.9為Spline法擬 合成果,成果顯示Spline可偵測疊置及微弱波形,但由圖 2.9看出,此方法仍無 法完 圖 2.9 Spline 法成果(上為峰值偵測成果、下為二階階導數法成果) (Toth et al, 2011) 高斯分解法廣泛應用於全波形光達波形分析中(Chauve et al., 2007; Hofton et al., 2000 ; Wagner et al., 2006; Toth et al., 2011; Lin et al., 2010; Persson et al., 2005), 此方法依植物覆蓋濃密度不同,由稀疏至濃密可增加近 18%-50%的三維點資訊 (Chauve et al., 2007; Persson et al., 2005),而波形成功擬合率為 98%以上(Chauve et al., 2007; Wagner et al., 2006)。因為發射脈衝(Outgoing Pulse)的形狀類似高斯函數, 當雷射波掃描至地表,回波波形相似於高斯曲線,故使用高斯分解法可有效的分 解疊置波形與微弱波形。高斯分解法原理為使用多個高斯函數疊加擬合波形,並 由高斯函數得到位置、振幅與波寬參數。而剩餘無法成功擬合波形的原因為初始 值與擬合波形峰值位置相距太遠,通常此種狀況發生在波形太過複雜時(Wagner et al., 2006)。Persson et al.(2005)提出,當疊置回波內兩高斯曲線距離小於 0.8 公 尺時,無法有效地分解波形,但整體來說高斯分解法可有效的萃取回波資訊。表 2.1為Toth et al.(2011)比較上述五方法萃取峰波之個數,使用的波形共有 400 個,
全偵測出疊置波形。
成果
可以有效分解疊置之波形,但當兩波形距離小於光達 解析度時,亦無法成功萃取疊置波形峰值(Wagner et al., 2006)。
表 2.1、上述五方法之萃取峰波個數(Toth et al., 2011)
Method Peaks extracted Execution time(s)
顯示波形後處理可以萃取出更多的波形資訊,越複雜的擬合方法可取得越多 數量的峰波,如高斯分解較線上(onboard)萃取多出兩倍的波峰數,但相對來說也 會花費較大的計算量與時間。如圖 2.10,此圖由左至右分別表示兩波峰距離由 大至小,此圖顯示高斯分解
Onboard peak detection 583 N/A Thresholding 623 0.10 First derivative 714 0.05
Wavelet 737 1.48
Spline-fitting and second derivative 791 4.89 Decomposition by Gaussain function 1180 356.41
高斯分解法又常比較於對數常態(Lognormal)函數與廣義高斯(Generalized Gaussian)函數(Chauve et al., 2007; Toth et al., 2011),其公式分別為式(1)~(3),後 兩者皆由高斯分解衍伸而來。圖 2.11為高斯分解、對數常態函數與廣義高斯函 數示意圖,圖 2.11左紅色曲線為高斯函數、藍色虛線為對數常態函數,由圖可 看出高斯函數 為廣義高斯 函數分布,配合 曲線α 2,此 紅 α √2 表對稱函數、對數常態函數表不對稱函數。圖 2.11右 式(3)藍色 曲線較為扁平; 色曲線為高斯函數 :綠色曲線為拉普拉斯函數(Laplace function) α 1,α值變化影響函數形 狀。
∑
= − − = N j j j j j G x a x f 1 2 2 , ) 2 ) ( exp( ) ( σ μ (1)∑
= − − − = N j j j j j j L s x a x f 1 2 2 , ) 2 ) ) (ln( exp( ) ( σ μ (2)∑
= − − = N j j j j j GG j x a x f 1 2 , ) 2 ) ( exp( ) ( 2 σ μ α (3) 其中,μ
j為中心點時間;σ
j為半波寬;a
j為振幅。 圖 2.11、左:高斯與對數常態分布、右: 廣義高斯分佈(Chauve et al., 2007) Chauve et al.(2007)比較以上三種方法,指出高斯分解法不適用於分解太過複 雜的波形,易造成精度降低;而對數常態函數法和高斯分解法相比整體擬合精度 並無提升,但有辦法提升區域性的精度,例如街道(鋪面或瀝青)與建物邊緣,此 顯示某些回波波形為不對稱的;廣義高斯函數相較之下擬合精度最高,因為此函數可適用於不同形狀的回波訊號,但仍然不適用於非對稱回波。此外,廣義高斯 函數之α參數可應用於地物分類,如圖 2.12將地物分類為屋頂(黑色)、瀝青街道 (黑灰)及濃密植物覆蓋區(灰),三種地物的分布曲線平均值皆為 1.55 左右,故顯 示大部分回波訊號形狀較扁平,且因屋頂與另兩種地物曲線差異大,故α參數配 合其他波形參數,在都市區可應用在人造建物與非人造物的分類。 圖 2.12、α參數對不同地物類別之曲線分布(Chauve et al., 2007) 高斯分解法相較於以上方法可有效分析波形且求解穩定,故廣泛被使用。因 高斯分解為非線性函數,求解時需要進行迭代運算,故初始值給定為重要步驟, 影響高斯分解成果,初始值給定方法方法有 Zero-crossing of first derivative、重心 偵測法(Center of Gravity Detection)或小波轉換(Wang et al., 2011)等。為使求解更 穩定,可使用 Expectation Maximation (Persson et al., 2005)、Levenberg-Marquardt (Wagner et al., 2006; Hofton et al., 2000)或 Trust-region (Lin et al., 2010)等演算法 進行參數的求解。Lin et al.(2010)提出透過嚴密的初始值計算與精密的迭代過程, 和使用 Levenberg-Marquardt 的高斯分解模型成果比較,提出之方法可提高高斯 求解時疊置回波與微弱回波的萃取,證明初始值的給定與迭代的過程影響高斯分 解成果。
2.3 波形堆疊方法介紹
Persson et al.(2005)提出由視覺化分析波形資料,方法為根據波形相對位置關 係,將取樣之波形強度值填入三維網格中,若同一網格對應一個以上強度值,則 選取強度值最大者填入。此外,為配合取樣間隔距離,網格之長、寬、高皆為 0.15 公尺。透過三維視覺化展示,可得知波形資訊具有空間關聯性,可透過波形 之空間關聯性進行波形特徵萃取。Jutzi and Stilla(2005)利用地面光達掃描並記錄波形資訊進行資料分析,目的 為沿著x方向切割資料進行地表特徵萃取,分析波形資訊中地表物隨著時間變化 之空間分布,如圖 2.13。此方法首先利用高斯分解法進行一維波形分析;接著 三維網格化將回波強度值(intensity)填入網格,此網格之長、寬、高分別為x、y、 t;爾後將三維網格沿x方向切割成二維影像進行分析。透過此方法,不僅可分析 地物於t方向上結構的變化(一維分析),更可分析鄰近切割面的空間分布關係(二 維分析)。圖 為二維分析成果,其將網格化影像進行線性特徵萃取,接著依 空間位置將萃取出線段排序展示成果。考慮波形空間分布之萃取方法優點為地表 物具有空間關聯性,故可透過空間上排序分析資料連續性,補足因遮蔽或回波微 弱未偵測出之地表特徵,亦可剔除偵測錯誤結果。
圖 2.13、 沿 x 平面切割影像(Jutzi and Stilla, 2005) 2.14
圖 2.14、 線性特徵萃取成果(Jutzi and Stilla, 2005)
Yao et al.(2010)除了如Jutzi and Stilla(2005)將網格三維化分析地表物空間關 係外,並提出波形堆疊法(Waveform stacking)以萃取微弱回波。如圖 2.15此方法 示意圖,將鄰近波形以不同坡度α方向進行堆疊,當堆疊方向正確時,會有最強 的增顯效果以萃取微弱回波,示意圖中顯示α 60°增顯效果較α 90°佳。圖 2.16為利用實際波形進行堆疊的成果,坡度以5°為區間堆疊,成果顯示此堆疊於 α 30°時增顯效果最佳。應用此方法先決條件為掃描地物為房屋,具有規則的 幾何性質,故可沿著某一方向進行波形堆疊,方法優點為微弱回波周圍不一定需 要有強烈的回波,缺點為僅可用規則幾何性質地物。
Yao et al.(2010)和 Jutzi and Stilla(2005)均使用固定站之地面光達,故所有回 波波形之原點均相同.此方法未考量動態取樣光達系統之特性,各回波之掃描原 點均不相同,需先處理波形對位,再進行波形堆疊.
圖 2.15、沿著坡度進行波形堆疊示意圖(Yao et al., 2010) 動機為雖然一維的波形分 析可有效萃取地表之垂直結構與物理性質資訊,但是傳統的演算法存在限制,無 法有效偵測地表微弱回波。該研究選取合適之鄰近波形進行波形堆疊法處理,以 增強原始波形並萃取微弱回波,而波形堆疊法的挑戰在於避免萃取到雜訊。研究 中,首先,使用高斯分解法進行單一回波波形資訊萃取;接著,利用Z-curve方 法將單一波形進行空間位置排列,此步驟目的為增加鄰近波形選取效率;最後, 選取可堆疊的回波進行波形資訊萃取。圖 2.17為波形堆疊範例,紅虛線為原始 圖 2.16、沿坡度進行波形堆疊之成果(Yao et al., 2010) Magruder et al.(2010a)提出波形堆疊法進行微弱地表回波偵測,這些微弱回 波形成原因可能為遮蔽、衰減及大氣吸收等等。其研究
波形、黑色為成功堆疊波形、其他顏色曲線為鄰近波形。由左圖中看出,紅虛線 最後回波原視為雜訊,經過波形堆疊後最後回波訊號增強,並判斷鄰近波形是否 在此處有訊號反應,若有則萃取出額外回波資訊;右圖中紅色虛線原始波形經過 波形堆疊後,最後回波訊號增強至可偵測等級,並判斷鄰近波形(藍、綠色)是否 在該處亦有可偵測之訊號反應,若有則萃取堆疊波形最後回波資訊。圖 2.18為 該研究高程與最後回波個數統計直方圖,左圖為高斯分解法成果,右圖為經過波 形堆疊法後之成果,由直方圖中可看出透過波形堆疊法後,在高程低的位置回波 個數增加,此成果顯示波形堆疊法可偵測微弱地面資訊。
圖 2.17、波形堆疊情形範例(Magruder et al., 2010a)
圖 、高程與最後回波個數直方圖,左:高斯分解法、右:波形堆疊法 (Magruder et
2.18
該研究可成功增加低高程之資訊萃取,但主要不足有二:(1)此研究並無判 斷堆疊回波之最後回波是否為地面點;(2)此研究波形堆疊方式以樹冠高度為基 準,而地表具有高程起伏,故波形堆疊萃取之地面位置較不精確。本研究堆疊波 形基準以鄰近地面點為出發點,且利用時間序列選取鄰近波形,故可考量地表連 續性及萃取出較精確的地面點位置。
第3章 研究方法
1 本研究使用小足跡光達資料,相鄰回波距離小於 公尺,故假設鄰近波形掃 描之地物具有空間關聯性。研究目的為考慮相鄰波形間空間關聯性,結合高斯分 解法及波形堆疊法進行微弱波形偵測。當地表受到遮蔽時,地面回波通常較微弱, 難以和雜訊區分,透過鄰近波形疊合可增強微弱回波訊號,增加地面點萃取率。 3.1(a)為房屋點雲俯視圖,圖 3.1(b)為沿圖 3.1(a)紅色框方向切割之側視圖, 側視圖中可觀察出鄰近波形之回波具有空間連續性,可進行三維波形堆疊、增強 微弱回波訊號。 (a)房屋點雲俯視圖(高程值) (b)房屋點雲側視圖(強度值) 圖 3.1、房屋點雲圖 圖圖 3.2為實驗流程圖 為波形分析、鄰近波形選 取及波形堆疊。首先,將測試區域內之單一回波波形進行波形分析;接著,以中 心波形為主軸,透過條件機制判斷鄰近波形是否可進行疊合,若可則進入波形堆 疊步驟,若不可則保留原始高斯分解得到的三維點資訊;最後,因每個波形開始 紀錄之高程位置並不相同,故需進行波形位置對位,將波形調整至相應位置始可 進行波形堆疊。本研究著重於地面微弱回波萃取 並透過條件機制判斷是否於一維波形分析中重複萃取,最後結合波形分析成果與 波形堆疊萃取成果,完成波形資訊萃取。 圖 、研究流程圖 ,實驗主要分為三步驟,分別 ,故波形堆疊僅萃取最後回波, 3.2
3.1
波形分析的首要步驟為雜訊濾除,雜訊濾除的目的為避免雜訊干擾波形萃取 成果。本研究將雜訊濾除分為兩個步驟,分別為區域雜訊濾除與背景雜訊濾除。 區域雜訊濾除使用方法為高斯平滑化,此方法利用高斯曲線值作為權值進行平滑 化,需給定兩個參數,分別為標準差與罩窗大小。當標準差越小時,表示高斯曲 線形狀越窄,此時權值分布相較之下集中於中央,則平滑效果較差,反之亦然; 罩窗大小亦影響平滑效果,當罩窗大小越大時,模糊化效果越明顯,可平均區域 雜訊。如圖 3.3、圖 3.4,紅色曲線為未經高斯平滑化之原始波形,藍色曲線為 高斯平滑化後之波形,由圖中可看出經過高斯平滑後,回波峰值較原始波形低, 且雜訊易出現於低回波訊號處,經高斯平滑化後低回波訊號處曲線較平滑。比較 圖 3.3、圖 3.4,兩圖給定不同標準差及罩窗大小,前者標準差為 1、罩窗大小 為 5,後者標準差為 5、罩窗大小為 9,成果顯示後者原始波形與平滑化後波形 峰值差異較大,且在低回波訊號處曲線較平滑。雜訊濾除為波形分析中重要部分, 當雜訊過多時易影響波形資訊萃取,但若過度濾除雜訊亦可能造成微弱回波遭平 滑化,導致資訊遺漏情況。波形分析
3.1.1 雜訊濾除
圖 、高斯平滑化 標準差為 、罩窗大小為 圖 3.4、高斯平滑化 2(標準差為 5、罩窗大小為 9) 由圖 3.3和圖 3.4可觀察出波形具有背景雜訊,本研究利用統計方式進行背 景雜訊濾除。本研究統計回波訊號數量,將個數最多的回波訊號值加上一數值 , 完成背景雜訊值給定,如式(4)。加上一數值 的原因為雜訊值震盪,此數值用 以寬鬆背景雜訊值,圖 3.5紅色方形為統計方法而得之背景雜訊值。 的給定如 圖 3.6,依據背景雜訊的震盪程度而定。得到背景雜訊值後,將回波訊號扣除背 景雜訊,若扣除背景雜訊後之回波訊號小於零,則將回波訊號設定為零。成果如 3.3 1( 1 5)
圖 3.7,綠色曲線為未濾除背景雜訊波形,紅色曲線為濾除背景雜訊波形。
背景雜訊值 回波訊號眾數 (4)
圖 3.5、背景雜訊給定
圖 3.7、濾除背景雜訊成果
3.1.2 初始值給定
由於高斯分解法函數為非線性函數,需進行迭代求解,故需給定欲求解參數 之初始值,初始值給定影響後續高斯分解成果。如圖 3.8,高斯分解法求解需給 定之初始值有三個,分別為波峰位置(三角形)、半波寬(藍線)、振幅(綠線),以下 將說明如何給定。研究中,初始波峰位置給定方法為計算曲線斜率變化搜尋局部 最大值,並設定門檻值選取,門檻設定有三個:(1)兩局部最大值距離大於門檻 值,(2)局部最大值不可太靠近波形邊緣,(3)局部最大值需大於背景雜訊。此方 法萃取出之候選點可做為高斯分解時良好之初始值,圖 3.9至圖 3.12為候選點選 取過程。圖 3.9為計算斜率變化後得到之局部最大值及局部最小值位置,黑色三 角形為局部最大值,紅色三角形為局部最小值;圖 3.10為設定門檻值去除太接 近極值之成果;圖 3.11為去除太接近邊緣極值之成果;圖 3.12為去除小於背景 雜訊之極值,最後,候選點數量為兩個,作為高斯分解法初始值之用。圖
圖 、原始局部最大極 3.8、高斯分解法求解參數
圖 3.10、去除太接近極值成果
圖 果 初始振幅給定方法為計算局部最大值回波訊號減去背景雜訊值,如式(5); 初始半波寬(圖 3.13)給定方法為局部最大值位置和最鄰近局部最小值位置之差 值,如式(6)。 初始振幅 局部最大值回波訊號 背景雜訊值 (5) 初始波寬 distance 局部最大值 最鄰近局部最小值 (6) 圖 3.13、初始半波寬示意圖 3.12、去除小於背景雜訊極值成
3.1.3 高斯分解法
高斯分解法為波形分析中被廣泛使用的方法,使用原因為回波波形相似於高 斯曲線分布,可有效的萃取回波資訊,且此方法求解穩定,求解過程較不易發散。 高斯分解法公式如式(1),此方法假設回波波形可由數個不同形狀的高斯曲線疊 加擬合而成,將回波波形分解成數個不同的高斯曲線,並取得回波時間、波寬、 振幅參數。圖 3.14為高斯分解法擬合成果,藍色曲線為原始回波訊號、紅色曲 線為擬合過後之回波訊號、綠色曲線為高斯分解法分解出之單一波形。 圖 3.14、高斯分解法 高斯分解法萃取之參數分別為回波時間、半波寬與振幅,透過公式(7)可換 算得到空間中三維點坐標。其中,t 為回波時間; 、 、 為物空間坐標; 、 、 為坐標參數,可於 LAS 檔中得知; 、 、 為初始坐標值, 可由 LAS 檔中紀錄之 、 、 與 、 、 推得。 X Y (7) Z3.2 鄰近波形選取
波形堆疊法使用前提為,當使用小足跡光達資料時,兩相鄰回波距離小於 1 公尺,故假設兩相鄰回波具有空間相鄰性。波形堆疊方式通常分為兩種: 透 過空間相鄰性選取距離接近的波形; 根據時間序列,透過原始資料中紀錄的 進行相鄰波形堆疊。本研究使用後者,原因是光達為連續掃描,故沿掃 描方向選取欲堆疊波形,波形兩兩平行,疊合較緊密且不容易錯位;若透過空間 相鄰性選取波形,不同掃描線 之波形不平行,則導致鄰近空間位置之 波形不平行,使之不易堆疊。如圖 所示,紅色與藍色表示不同掃描線不同 入射角之波形,堆疊不同掃描線之波形可能造成錯誤堆疊。此外,因透過GPS time 選取欲堆疊波形,可節省計算時間,但缺點為僅能堆疊沿掃描方向之波形。圖 3.16為經過時間排序後之波形,如圖中因各波形紀錄之起始位置不同,故以某一 波形位置為基準,將各波形對位至相對位置。其中,因需對應各波形相對位置, 故將各回波訊號位置由時間轉換為距離單位。研究中為避免堆疊過多波形而將資 訊複雜化,故以一波形為基準,選取經時間排序之前、後兩相鄰波形進行堆疊。 圖 3.15、鄰近波形選取示意圖 (1) (2) GPS time (scan line) 3.153.3 波形堆疊
3.3.1 波形平移與堆疊
經過上述波形選取與對位後,波形堆疊時因地面不一定為平坦地,故欲堆疊 之前、後波形需平移至相應位置始可堆疊。圖 3.17為波形堆疊示意圖,綠色曲 線為主波形,紅色、藍色曲線分別為前、後相鄰波形,黑色曲線為經過對位後之 堆疊波形,三角形皆代表高斯分解之波峰位置。圖中得知綠色曲線於地面處回波 訊號微弱,未能藉由一維波形分析萃取地面資訊,故欲利用波形堆疊法增強地面 資訊並萃取。圖中說明此方法將最後回波連線(紫線),並沿連線方向堆疊波形。 波形平移與堆疊分為三個步驟,(1)將前、後兩波形經高斯分解後之最後回波位 置連線,計算中間波形與連線之交點; 計算交點與前、後兩波形的平移量;(3) 以中間波形為基準,將前、後波形平移並堆疊,堆疊波形如圖中黑色曲線。 圖 3.17、波形堆疊示意圖-2 (2)波形對位數學式如公式(8),研究中將回波位置轉換為距離,(s(t0), t0)為主波 形和連線之交點,連線為以鄰近兩波形最後回波位置作為頂點所組成之直線。首 先以主波形與連線之焦點為基準,計算基準點和鄰近兩波形之最後回波 tpeak1 和 tpeak2 之平移量 dt1、dt2;接著將鄰近波形 t1、t2 加上平移量進行平移,得到 平移過後之波形 s1’(t)、s2’(t)。 dt1 t0 tpeak1 dt2 t0 tpeak2 s1 i s1 i dt1, i 1 … tn s2 i s2 i dt2, i 1 … tn 其中: dt1、dt2:鄰近波形平移量 tpeak1、tpeak2:鄰近波形兩波形最後回波距離 s1’(t)、s2’(t):平移過後之鄰近波形距離 s1(t)、s2(t):原始波形位置 (8) 但並非相鄰兩波形最後回波均為地面處,可能會發生連線錯誤或萃取至樹上 點之情形,故需設定條件機制,剔除錯誤的對位。本研究設定兩門檻( 、 ): (1)如圖 3.18當相鄰兩波形之最後回波距離超過給定門檻值時,假設兩回波無空 間相關性,原因為假設地物具有連續性且地表起伏在短距離內不會變化太大;(2) 如圖 3.19若前、後波形有多重回波,假設最後回波與前一回波距離需大於給定 門檻值,原因為本研究僅萃取地面點,考量測區樹木之高度,地面回波與非地面 回波不應距離太近。以上兩機制可避免錯誤的堆疊,例如樹木位置回波與地面回 波的連線,及避免樹木位置與樹木位置的連線,萃取出非微弱地面點資訊。 圖 3.20為波形對位前後比較圖,左圖為波形平移前鄰近波形對位圖、右圖 為波形平移後鄰近波形對位圖,其中,距離代表回波訊號和波形起始記錄位置之
距離 圖 、錯誤連線示意圖 圖 、成功連線示意圖 。圖中顯示透過波形對位處理後,前後兩相鄰最後回波與中央回波之微弱回 波位置對應。此圖證實相鄰回波於地面反應處確實具有空間關聯性,可用波形堆 疊的方式增強中央回波訊號,以萃取微弱資訊。 3.18 3.19
圖 3.20、波形對位前後比較圖
3.3.2 微弱回波萃取
此研究目的為偵測微弱地面回波,故當波形成功平移、堆疊後,利用高斯分 解法進行堆疊波形資訊萃取,僅保留最後回波資訊,如圖 3.21所示。然而,為 避免重複萃取地面點或波形堆疊時增強雜訊,故設定兩門檻值( 、 )以避免上 述情況。 門檻如圖 3.22設定若堆疊波形與原始中央波形之最後回波距離小於 給定門檻值,則視為重複萃取,此門檻值考慮對位平移及光達定位誤差。 門檻 如圖 3.23所示,假設中間波形與連線之交點與堆疊波形最後回波距離大於給定 門檻值,則視為錯誤萃取。此原因為考慮空間關聯性,中間波形與連線之交點應 接近地面微弱回波位置,若相差太遠可能為因波形堆疊,雜訊值增強所萃取之錯 誤點。圖 3.21、高斯分解萃取堆疊波形最後回波
圖 3.23、錯誤萃取示意圖
3.4 精度評估
本研究目的共有四個:(1)比較原始點雲、高斯分解後點雲與微弱地面回波 萃取後之點雲數量與正確率;(2)評估波形之間的空間距離與使用波形堆疊法萃 取微弱回波之正確率關係;(3)評估不同波形取樣數資料用於波形堆疊法之成果 差異;(4)評估入射角差異對於波形堆疊法之成果影響。故精度評估分為四部分: (1)以原始點雲為基準,比較點雲增加數量及增加率;(2)驗證增加點雲之正確性, 並計算萃取正確率;(3)評估不同波形取樣距離對萃取正確率之影響;(4)比較兩 組同區域、不同波形取樣數之萃取率與正確率。精度評估操作部分為人工編修及 統計原始資料地面點數量、高斯分解後地面點數量及波形堆疊法增加地面點數量, 接著計算其正確率與增加率,計算方法如公式 、公式(10)。 正確率 波形堆疊法萃取正確地面點數量 波形堆疊法萃取總點數 (9) % (9) 增加率 高斯分解法/波形堆疊法地面點數量 原始資料地面點數量 % (10)第4章 研究資料
本研究分別使用Leica ALS60、Riegl LMS-Q680i及Optech Pegasus掃描而得之 資料進行測試,地點為台灣南部,如圖 4.1標示處。測試資料位於同個區域,每 組測試資料依植物覆蓋濃密度區切割為三個小區域,分別為Case 1: 稀疏、Case 2: 濃密、Case 3: 濃密且複雜,測區大小約為 20m*60m,表 4.1為測區範圍。 表 4.1、三測區之區域 座 ULX RY 圖 4.1、測區位置(Imagery ©2013 TerraMetrics) 標(m) LRX ULY L Case 1 218125 218145 2571715 2571655 Case 2 218170 218190 2571645 257 257 1585 Case 3 218030 218050 2571700 1640
4.1 測試資料一
三 種,分別為Case 1: 稀疏、Case 2: 濃密、Case 3: 濃密且複雜,如下圖 4.2。
圖 、測試資料一
測試資料一由Leica ALS60 空載光達系統掃描而得,掃描時間為 2011 年 10 月。其雷射脈衝頻率為 55 kHz、掃描頻率為 61 Hz、飛行方向為東西向、掃描航 高為 2900m AGL、取樣時間間隔為每 1 ns,共有 256 個取樣數(slant range=38.4m), 紀錄格式為LAS 1.3。由此測試資料中,依照植物覆蓋濃密度區將資料切割為
試區域之側視圖,Case 1:植物高度較矮且較單純;Case 2: 植物覆蓋度高、植物高度較高 穿透率佳;Case 3:植物覆蓋複雜、穿透率較Case 2 差。其中,測區點密度分別為每平方公尺 3 5 個點,樹高範圍約分別為, Case 1 Case 2:3.5~22 Case 3:4~23
圖 4.3、測試資料一之側視圖(Intensity) 圖 4.3為三個測
、
、9、
4.2
測試資料二由 空載光達系統掃描而得,掃描時間為 月。其雷射脈衝頻率為 、掃描速度為每秒 條掃描線、掃描航高為 , 取 樣 數 (slant range=15m),紀錄格式為LAS 1.3。此資料僅切割同測試資料一Case 1 之區域範 圍,用以比較不同取樣數資料進行波形堆疊法成果之差別。此資料點密度較低, 為每平方公尺 2 個點,圖 4.4為測試資料二之側視圖。 圖 4.4、測試資料二之側視圖(elevation)測試資料二
Riegl LMS-Q680i 2012 年 01 220 kHz 119 2600m AGL 、 飛 行 方 向 為 南 北 向 、 取 樣 時 間 間 隔 為 每 1 ns4.3 測試資料三
測試資料三由Optech Pegasus空載光達系統掃描而得,掃描時間為 2011 年 10 月。其雷射脈衝頻率為 100 kHz、掃描速度為每秒 35 Hz、掃描航高為 1109m AGL、 飛行方向為南北向、取樣時間間隔為每 1 ns,取樣數介於 56 個至 216 個不等 (slant range=8.4- 32.4m) ,點密度為每平方公尺 3.47 個點,紀錄格式為LAS 1.3。此資 料僅切割同測試資料一Case 1 之區域範圍,用以比較不同取樣數資料進行波形堆 疊法成果之差別,圖 4.5為測試資料三之側視圖。 圖 4.5、測試資料三之側視圖(elevation)第5章 成果分析
在波形堆疊與微弱回波萃取過程中,各設定兩個門檻值,如表 所示。 與 為波形堆疊執行之門檻, 門檻為避免樹頂回波與地面回波之連線錯誤,故根 設定兩相鄰回波最後回波距離小於 3 公尺; 門檻設定目的為確保連線為地面點,故當單一波形內回波數大於 1,則 設定最後回波與前一回波距離大於 2.25 公尺,此門檻給定根據測區樹木高度。 與 門檻值為微弱回波萃取執行之門檻, 門檻給定目的為避免重複地面點萃取, 故設定堆疊波形與中央波形之最後回波距離小於 1.5 公尺; 門檻值設定目的為 避免萃取錯誤,故設定中央波形與連線之交點和堆疊波形萃取之最後回波距離小 於 1.5 公尺,以上兩門檻設定均考量連線誤差與光達定位誤差所給定。 表 5.1、波形堆疊法門檻值設定 參數 條件 門檻值 成果分析共有四大分析重點,分別為(1)單一萃取成果分析、(2)整體萃取成 果分析、(3)不同取樣距離成果分析、(4)不同取樣數成果分析、(5)入射角分析, 以下為各項成果展示與分析。5.1 單一萃取成果分析
5.1 據測區最矮樹木之高度與地形起伏程度, 原因 1.鄰近回波之最後回波距離 < 3 公尺 避免連線錯誤(樹 頂與地面) 2.兩回波距離(若回波數大於 1) >2.25 公尺 確保為地面點 3.最後回波距離(堆疊波形-中央波形) >1.5 公尺 避免重複萃取地 面點 4.距離(連線交點-堆疊波形最後回波) <0.75 公尺 避免萃取錯誤表 5.2為門檻值 別設定為 4.5 公尺、3 公 尺及 1.5 公尺,探討點數量萃取及萃取正確率。 門檻值設定考量因素為測區地 形坡度起伏,由表中分析得到,當門檻值設定為鄰近回波最後回波距離小於 4.5 公尺即堆疊時,造成樹上點與地面點錯誤連線,此時會萃取到較多的樹上點,而 使正確率降低。當門檻值設定為 1.5 公尺時,較設定為 3 公尺時正確率提高,但 相對來說萃取到的地面點數也較少。整體來說,因使用資料足跡小,故在短距離 面應不會有太大起伏, 門檻值設定 公尺及 公尺並無太顯著之差異, 研究使用較寬鬆之 公尺門檻,亦可因應當取樣距離較大時,地形起伏亦較 大的情形。 表 、 門檻值探討 4.5 公尺 3 公尺 1.5 公尺 給定探討,實驗中將 門檻值分 內地 而 1.5 3 故本 3 5.2 正確點 正確率 正確點 正確率 正確點 正確率 Case 1 48 53% 48 79% 41 83% Case 2 197 64% 197 80% 190 85% Case 3 101 54% 101 75% 89 82% 表 5.3為門檻值 給定探討,此門檻值設定目的為確保萃取之最後回波為地 面回波,根據測區植物最小高度給定。本研究分別探討門檻值設定為 3 公尺、2.25 公尺及 1.5 公尺時,萃取點數與正確率之變化。由表中得知當設定為 2.25 公尺時, 三個測區的正確率較高。原因為當設定為 3 公尺時,測區內亦有小於 3 公尺之植 物 而使門檻值設定太過嚴苛,正確地面點數量萃取減少,影響萃取正確率。而 當設定為 1.5 公尺時,因測區樹木高度大多大於 2.25 公尺,故沒有增加正確點數 量 但因為樹冠回波訊號的距離較近,增加了錯誤的樹冠區域萃取,使錯誤點增 加、降低萃取正確率。故本研究配合測區最小樹木高度,設定此門檻值為 25 公尺。 , , 2.
表 5.3、 門檻值探討 3 公尺 2.25 公尺 1.5 公尺 正確點 正確率 正確點 正確率 正確點 正確率 Case 1 39 76% 48 79% 48 71% Case 2 177 80% 197 80% 197 76% Case 3 84 71% 101 75% 102 64% 圖 5.1為單一萃取成果,波形堆疊法的處理過程首先進行波形對位,爾後為 波形平移,將鄰近回波之地面位置相對應,接著進行波形堆疊並使用高斯分解法 萃取地面點。萃取成果中紅點為波形堆疊法萃取之地面點,成果顯示波形堆疊法 可成功增強地面微弱回波訊號 5.2為萃取失敗之案例,成 果指出當鄰近回波均無穿透至地面時, 研究 資料之地面穿 響 。 圖 5.1、波形堆疊法堆疊過程與成果 ,並萃取出地面點。圖 則波形堆疊法將萃取失敗。由此可知 透率將影 萃取成效
(a)錯誤波形堆疊
(b)錯誤波形萃取成果
5.2 整體萃取成果分析
整體萃取成果分析部分使用Leica ALS60 之資料進行分析,分為兩部分探討: (1)微弱回波訊號值分析;(2)三測區之地面點增加率及正確率分析。圖 5.3為偵測 得之微弱回波訊號值探討,圖 5.3(a)和圖 5.3(c)為成功萃取地面點資訊之前、後 鄰近波形最後回波訊號值統計直方圖,圖 5.3(b)為堆疊波形萃取之地面點位置對 應至原始波形位置紀錄之回波訊號值統計直方圖。圖 5.3 (a)、圖 5.3 (c)指出, 因植物遮蔽削減雷射波強度,故地面回波訊號值分布於 20 至 60 之間,較樹頂的 回波訊號弱,但仍然能夠使用一維波形分析方法萃取出地面點。比較圖 5.3(a)、 圖 5.3(b)與圖 5.3(c)得知,微弱回波訊號值大部分小於 20,而鄰近波形可透過一 維波形法萃取之地面回波訊號值 間。圖 5.3 (b)指出萃取位置 的原始回波訊號值分布於 14 至 21 之間,相近於背景雜訊值,而圖 5.3 (d)為原 始波形的背景雜訊統計,背景雜訊值介於 12.5 到 15.5 中間,集中於 14 至 15, 由此得知背景雜訊值與微弱回波訊號值接近,背景雜訊略低於微弱回波訊號值。 故使用一維波形分析方法無法成功萃取微弱回波資訊,但若透過波形堆疊法,考 量空間關係增強微弱回波訊號,可成功萃取出微弱回波地面點。 (a)前鄰近回波訊號統計 集中於 20 至 40 之(b)
(c)後鄰近回波訊號統計 中間回波訊號統計
圖 5.3、回波訊號值統計直方圖 (d)背景雜訊統計
表 5.4為整體萃取成果之統計表格,由表中得知三個測區之原始點總數分別 為 3309、10610 和 5902 個,其中第二測區之點密度最高。經過人工編修後得知, 三個測區之原始地面點總數為 1810、2135 和 508 個,其中亦為第二測區平均地 面點密度最高。透過波形堆疊法萃取後,三測區萃取正確地面點數分別為 48、 197、101 個,正確率分別為 79%、80%、75%。圖 5.4為地面點個數變化圖,圖 中顯示第二測區增加點數最為明顯,第三測區其次,最後為第一測區。由成果分 析,萃取點數與測區點密度及樹木複雜度有關,第一測區因植物覆蓋較不濃密, 較少地面微弱回波情形,故萃取點數較少;第二測區與第三測區比較,因第三測 區植物覆蓋較複雜且穿透率較差故其增加點數較少,又因植物覆蓋複雜故萃取正 確率下降。整體而言,波形堆疊法在穿透率佳、點密度較高之區域,萃取效果最 佳,而以地面點增加率而言,第三測區增加率最高,此顯示波形堆疊法可豐富穿 透率較差區域之地面資訊。 表 5.4、整體萃取成果增加點與正確率
unit: pts Case 1 Case 2 Case 3
原始點總數 3309 10610 5902 Ground 原始點 1810 增加點 2135 增加點 508 增加點 高斯分解 2135 325 3123 988 809 301 波形堆疊法 2203 61 3370 247 942 133 正確 正確率 正確 正確率 正確 正確率 48 79% 197 80% 101 75%
圖 為萃取地面點之視覺化成果剖面位置標示圖,由左至右分別為 、 和 ,紅線代表剖面位置。圖 至圖 為三測區萃取地面點之視 覺化成果,三圖皆為測區之側視剖面圖,其中綠色為原始點、白色為高斯分解後 的點、紅色為經過波形堆疊法後所萃取的點。由圖 可看到,雖此側視圖增加 的點數並不多,但是圖 因植物遮蔽而 回波訊號較微 使用 高 取之地面 過波形堆疊法萃 色點),可將地面資訊補上。 圖 5.7為測區二視覺化成果,由於測區二的點受植物遮蔽較嚴重,產生地面微弱 回波情形較盛,故相對來說利用波形堆疊法萃取到的地面點也較多。比較測區二 (圖 5.7)及測區三(圖 5.8)之成果,測區二和測區三植物遮蔽問題嚴重,但測區二 的穿透率較高、地面資訊較豐富,故由視覺化成果得到,測區二的較無錯誤萃取 情形,而測區三因植物覆蓋較複雜且穿透率較差,故萃取錯誤情形較多。但整理 而言,波形堆疊法可有效豐富地面資訊。 0
地表點個數變化
500 1500 2500 3500 4000 1000 2000 3000原始資料 高斯分解 波形堆疊
地表點個數
case 1
case 2
case 3
圖 5.4、
整體萃取成果地面點個數變化 5.5 Case 1 Case 2 Case 3 5.6 5.8 5.6 中右手邊 使地面 弱,無法 斯分解法萃 點,透 取後(紅圖 5.6、測區一成果視覺展示
Before
圖 5.7、測區二成果視覺展示
Before
Before
After
5.3 不同取樣距離成果分析
不同取樣距離分析實驗目的為探討波形間空間關聯性與萃取正確率之影響, 故操作方法為分析三種空間關係之波形堆疊法萃取成效,分別為選取最鄰近波形 堆疊、選取第二鄰近波形堆疊與選取第三鄰近波形堆疊,此部分使用Leica ALS60 掃描而得之資料。如圖 5.9,各測區之資料密度不同,故各空間關係波形與波形 間距離亦不盡相同,統計而得空間關係 1 距離約為 0.4~0.7 公尺、空間關係 2 約 為 0.8~1.4 公尺、空間關係 3 約為 1.3~2 公尺之間。 (a) (b) (c) 圖 5.9、空間關係示意圖表 5.5為空間關係與萃取正確率之關係,圖 5.10為空間關係與萃取正確率之 變化趨勢。表 5.5中三個測區成果隨著空間關聯性降低而使萃取正確率降低,配 合圖 5.10得知第三測區的正確率下降趨勢最大,其原因為測區三之植物覆蓋較 複雜且地形變化較大,故當空間關係降低時,正確率降低趨勢亦較大。 、空間關係與萃取正確率 表 5.5 空間關係與萃取正確率
空間關係 case 1 case 2 case 3
1 79% 80% 75% 2 74% 73% 66% 3 65% 70% 58% 圖 5.10、空間關係與萃取正確率之變化趨勢 0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 1 2 3
正確率
空間關係趨勢
case 1 case 2 case 3因空間關係 1 及空間關係 2 成果之正確率皆高於 65%,故結合兩成果之增加 點數作為本研究之成果,由表 5.6得知,結合了兩成果後增加之正確點數量分別 為 140、408 及 228 個點。表 5.7顯示,和高斯分解所增加的地面點相比較,測 區一與測區二增加點數為 8%和 19%,為高斯分解法的 40%。而相對來說地面點 資訊較不豐富的第三測區 解法的 76%,由此可 知使用高斯分解法及波形堆 訊,而波形堆疊法可彌補高 斯分解法的波形擬合限制。 5.6、 果之 增加數 點增加 ,增加點數量為 45%,為高斯分 疊法,可有效豐富地面資 表 結合成 地面點 地面 數
(Unit: pts) case 1 case 2 case 3
Original 1810 2135 508
Gaussian 325 988 301
Stacking 140 408 228
表 5.7、結合成果之地面點增加率 地面點增加率
case 1 case 2 case 3
Gaussian 18% 46% 59%
圖 5.11為三測區最後成果剖面圖,紅線代表剖面位置。圖 5.12至圖 5.14為 結合兩空間關係萃取成果之視覺化展示,白色為原始點、綠色為空間關係 1 萃取 成果、紅色為空間關係 2 萃取成果。圖中顯示空間關係 2 因取樣距離較大,雖空 間關聯性較弱,但可彌補地面資訊較空洞之區域,結合兩萃取成果可使地面資訊 豐富度提高。由圖 5.14中觀察得到因此測區原始的地面資訊較破碎且植物覆蓋 較複雜,故錯誤點數量較多,但波形堆疊法可適量的補償地面資訊缺失,增強地 面判釋。 圖 5.11、最後成果剖面標示圖