頁 9 7 ~ 1 2 8 頁 Mar. 2011, pp. 97-128
應用格位傳送模式建構高速公路動態起迄矩陣
推估演算法
1A Dynamic Freeway Origin-Destination Matrices
Estimation Algorithm with Cell Transmission Modeling
邱裕鈞 Yu-Chiun Chiou2 藍武王 Lawrence W. Lan3 許珮珊 Pei-Shan Shiu4 曾群明 Chun-Ming Tseng5 摘要 本研究結合進階卡門濾波與格位傳送模式,建構遞迴動態 O-D 矩陣推估 演算法,藉由該演算法模擬在不同交通情況下車輛到達型態之交通行為,並 預測各依時 O-D 起迄對之到達型態,以便推估動態 O-D 矩陣。為驗證本演算 法,本研究以 6 個 O-D 起迄對之小路網為範例,每 6 秒為 1 時階,推估 90 分 鐘的 O-D 矩陣,再與 Greenshields 巨觀模式預測車輛旅行時間及假設進入車 輛會於兩時階範圍內到達迄點之演算法進行比較。結果顯示本模式推估結果 之 RMSE 遠較 Greenshields 巨觀模式為低。此外,本研究另以國道 1 號楊梅至 泰山收費站間及臺中至臺北間進行實例應用,結果顯示本模式之 RMSE 均在 可接受範圍,說明本演算法的有效性與實用價值。 關鍵詞:動態起迄矩陣推估、進階卡門濾波、格位傳送模式 1 本文為國科會研究計畫 (NSC 96-2628-E-009-171-MY3) 及國道高速公路局中區工程處 交控中心部分業務委外案 (契約編號:097C04C008) 之部分成果。 2 交通大學交通運輸研究所教授 (聯絡地址:100 臺北市忠孝西路一段 118 號 4 樓,電話: 02-23494940,E-mail: [email protected])。 3 大華技術學院行銷與流通管理系專任講座教授,交通大學榮譽退休教授。 4 交通大學交通運輸研究所碩士。
Abstract
This study proposes an iterative dynamic O-D matrices estimation algorithm to effectively capture the traffic behaviors and their arrival distributions under various traffic conditions. The core logic of the proposed algorithm is to combine extended Kalman filtering with cell transmission model to simulate traffic movement behaviors so as to predict the arrival distributions of all O-D pair traffic in various time intervals, and then to estimate dynamic O-D matrices. To validate the performance of the proposed algorithm, a small-scale corridor example with six O-D pairs is tested, in which a set of 90-minute O-D matrices, varying at every six seconds is estimated. For comparison, the Greenshields macroscopic model, which predicts the travel time by assuming that entered traffic will arrive at their destinations within two time intervals, is also tested in the same corridor example. The results show that the proposed algorithm can obtain a relatively accurate estimation result with RMSE value much smaller than the Greenshields model. To further investigate the applicability of the proposed algorithm, two case corridors on Taiwan Freeway No.1: Yangmei Toll Station to Taishan Toll Station and Taichung Interchange to Taipei Interchange are conducted. The results show that the proposed algorithm can obtain satisfactory RMSE values, suggesting the effectiveness and applicability of the proposed algorithm.
Keywords: Dynamic O-D estimation, Extended Kalman filtering, Cell transmission model
一、前言
起迄旅次矩陣 (Origin-Destination, O-D) 推估對運輸規劃而言是相當 重 要 的 課 題 , 隨 著 近年來 智 慧型運 輸 系統 (Intelligent Transportation Systems, ITS) 的蓬勃發展,始能方便加入更多及時資訊,使得推估的結 果更為精確,因此,動態起迄旅次矩陣推估已逐漸被大家所重視,而傳統 上的 O-D 流量矩陣是只考慮一個特定的時間,推估的 O-D 矩陣係利用該 時段的平均交通流量而得,大部分靜態的文獻當中,如 Nguyen (1984)、 Nguyen et al. (1988) 需依賴大量歷史 O-D 資訊或是假設特定駕駛行為規則 來產生合理的推估結果。基此,為了將 O-D 推估的方法擴展到動態的環境下,部分的學者使用 時間序列的交通流量來建立之間的關係,以早期的 Nihan and Davis (1987) 和 Cremer and Keller (1987) 為代表,主要係根據預測誤差最小化的方法, 建立一系列路口或小路網的 O-D 推估模式,Bell (1991) 作了更深入的研 究,以受限ㄧ般化最小平方法 (Constrained Generalized Least Squares) 進 行 O-D 推估,並假設路徑選擇遵從比例指派原則。此外,透過交通流量模 化的 O-D 推估系統方程式,一般而言其準確性不易被接受,乃是由於系統 的方程式通常遠少於 O-D 起迄對 (O-D Pair) 的數量,因此,所有靜態方 法的文獻當中都會利用一些歷史矩陣或是假設某分配以獲得單一解,
Maher (1983) 透過觀測之路段流量來推估旅次矩陣,並假設歷史 O-D 矩陣 與觀測流量均遵守多變量常態分配 (Multivariate Normal Distributions,
MVN)、路徑選擇為比例指派,以及所有路段的交通量為可得,其優點為
歷史 O-D 矩陣與觀測流量允許有不同的變異。而 Nihan and Davis (1989) 與
Okutani (1987) 大部分的動態方法,均引入時間序列的交通流量而設定更 多的限制式,使得系統方程增添明確性,同時透過遞迴或非遞迴系統求解 技術以獲得單一 O-D 矩陣。 然值得注意的是,不論是靜態或是動態的推估方法,O-D 矩陣與交通 流量之間的關係必須是給定或是部份已知的,在此關係下,靜態部分的應 用,主要係用來作為一般路網的規劃,該 O-D 與路段流量之間的關係透過 靜態交通指派模式而建立,如:Fisk (1988)、Van Zuylen and Willumsen
(1980);而近期發展之大部分動態方法與應用可分為兩大類,指派
(Assignment-based) 與非指派 (Non-assignment-based) 方法,Chang and
Tao (1999) 已將此兩種方法作詳細的整理,指派方法乃假設有先驗之真實
依時 O-D (Dynamic or Time Dependent Origin-Destination) 並且獲得準確的 動態交通指派模式,然而,非指派方法考慮了取得真實之先驗依時 O-D 資 訊之困難度,部份研究已發展出許多推估方法,係僅利用可獲得之時間序 列交通量,減少對先驗依時 O-D 與動態交通指派模式之依賴。但是在動態 推估模式中仍受限於小型路網或獨立路口,如 Willumsen (1984),最主要 的原因是依時性的 O-D 與路段流量之間的關係難以建立,同時旅行時間對 模式而言僅假設為一常數,然就實際的路網而言,穿越路網的每個成對起 迄點之旅行時間應該是依時性的,故依此方式很難產生可令人接受的結 果,特別是在交通飽和和事故發生所造成的擁擠路網下。而高速公路路網 中,存在些許獨有的性質,使其能提供有利用價值的資訊來推估動態 O-D,例如:上下匝道能量守恆的特性、良好的依時性流量估計,以及沒
有複雜的路徑選擇問題,所以能有效發展動態 O-D 流量推估,如 Lin and Chang (2007) 與曾國雄等人 (1997)。 為了改善動態 O-D 推估之合理性,除了利用觀測流量建構系統方程式 外,同時也要有客觀旅行時間推估方法,過去大部分的推估方法中,均會 對旅行時間作許多假設,如為一常數,或是分布在某範圍內,或是為某種 分配等,但是這些假設並無法反應真實路網中車輛的運行行為。曾國雄等 人 (1997) 嘗試以 Greenshields 巨觀車流模式估算車輛旅行時間,然而,巨 觀模式所觀測的規模較大,僅能利用平均路段流量計算平均旅行時間,一 旦路段流量增加導致路網擁擠情形發生時,此法便會對旅行時間的估算過 於粗略,無法真實反應實際車輛之旅運行為。若以微觀車流模式進行推 估,雖然可詳盡觀察路段上所有車輛的運行行為,相對的會造成整體計算
以中觀車流模式作為旅行時間之估算方法,不僅能有效觀察到車隊中車輛 運行行為,亦能縮短計算與儲存所必須花費的時間與空間,便能增進動態
O-D矩陣推估之效率與客觀性。以中觀車流模式中 Daganzo (1994) 所發展
出的格位傳送模式 (Cell Transmission Model, CTM) 為預測旅行時間方 法,係以流體動力學的基本概念推導單一方向及單一出入口之道路密度變 化過程之模式,預測時間及空間變化之交通發展情形,將路段切割成數個 均質化路段,每個小路段稱為格位 (Cell),藉由模擬路段流量於格位間傳 送的過程,以及簡單的流體動力學理論,有效且準確的預測路網中車輛之 運行行為,因此不需要額外作任何的假設,使模式更能真實反應不同交通 流量下之消散情形。然而,以 CTM 來模擬交通行為,需預先提供每一個 起點的交通量,也就是說,必須由歷史資料去預測下一段時間上匝道交通 量,作為 CTM 模擬車輛到達型態資料。 有鑑於此,本研究係以 Chang and Wu (1994) 所建立的動態起迄旅次 推估模式為基礎,並考量路網中旅行時間差異之獨特觀點,作本模式之延 伸應用,以彌補過往文獻中,動態起迄旅次矩陣推估模式之不足。Chang and Wu (1994) 及 Chang and Tao (1996) 係以巨觀車流的觀點,假設在相同時 間進入高速公路的車輛,其離開高速公路的時間會分布在某一極小時段之 範圍內。為進一步擴充其研究限制,Lin and Chang (2005) 則假設旅行時間 呈現某一分配,用以代表不同駕駛者對道路擁擠情況之不同反應。Lin and Chang (2007) 更進一步利用累積密度函數來計算旅行時間。不過,不論是 用何種假設條件均無法確實的反應出車輛在不同車流狀態下之受到其他 車輛干擾程度,進而影響旅行時間之分布情況。因此本研究為改善其缺 失,以 ARIMA 模式預測未來上匝道交通量,並利用格位傳送模式來預測 車輛到達型態,同時與動態起迄旅次矩陣推估模式相結合,並利用進階卡 門濾波模式 (Extended Kalman Filter, EKF) 來求解,依此建立遞迴預測型 動態起迄旅次矩陣推估模式。 本文內容安排如下:第二節說明本模式建構之過程與方法,以 ARIMA 模式預測交通量及應用 CTM 模式預測車輛到達型態。第三節利用小路網 進行模式驗證與 CTM 模式於不同交通流量之車輛擴散情形,並透過敏感 度分析了解本模式之績效與適用範疇。第四節再以國道 1 號路網進行實例 應用分析。最後根據研究結果提出結論與建議。
二、模式架構建立
本研究主要係利用 ARIMA 模式預測上匝道交通量,再以 CTM 模式 模擬車流在時間及空間上的流動,俾進行車輛到達型態之預測,最後利用 EKF 求解起迄對分配比例值,以構建遞迴式動態 O-D 矩陣之預測模式,模式架構如圖 1 所示。本節即針對模式架構進行說明:首先於 2.1 節介紹 Chang and Wu (1994) 推估 O-D 矩陣模式以及本模式修正該推估模式不完 善之處;2.2 節介紹 ARIMA 預測模式,2.3 節介紹卡門濾波演算法;2.4 節為 CTM 模式應用與不同交通流量下車輛消散的情形;最後 2.5 節建立 O-D推估與 CTM 之系統架構與演算流程。 ) (k qi Ul(k) yj(k) ) (k bij ) 1 ( +k m ij ρ ) 1 ( +k m ij ρ 圖 1 模式架構
2.1 O-D 推估模式
本研究的 O-D 矩陣推估模式主要是採用 Chang and Wu (1994) 的模 式,考慮一高速公路路段,如圖 2 所示。假設每個路段均有一對上下匝道 (除了開始與結束的路段),路網由 N 個路段、N+1 個節點和 N 個節線所組 成。以下是符號說明: 圖 2 高速公路路段示意圖 其中,q0(k):於時段 k 內由上游節點進入高速公路之車輛數;qi(k):於時 段 k 內從交流道 i 進入高速公路之車輛數,i = 1, 2, ..., N-1;yj(k):於時段 k 內從交流道 j 離開高速公路之車輛數,j = 1, 2, ..., N-1;yn(k):於時段 k 內 到達下游節點之主線道流量;Tij(k):於時段 k 內從交流道 i 進入高速公路,
Ul(k):於時段 k 內通過路段 l 起始線之車輛數;U k :於時段 k 內通過路l'( ) 段 l 終止線之車輛數。 該模式欲求解的是:如何從觀測之依時的上匝道車輛數 qi(k)、下匝道 車輛數 yj(k)以及主線車輛數 Ul(k),來推估隨時間變化的動態起迄 Tij(k) 或 bij(k)。 根據上述定義,存在以下關係: 1 ( ) N ( ) , 0,1,..., 1 i ij j i q k T k i N = + =
∑
= − (1) ( ) ( ) ( ) , 0 ij i ij T k =q k b k ≤ < ≤ (2) i j N 0≤b kij( ) 1 , 0≤ ≤ < ≤ (3) i j N 1 ( ) 1 , 0,1,..., 1 N ij j i b k i N = + = = −∑
(4) 然而,每個駕駛人之間的速率變化都不盡相同,因此假設時段 k 從交 流道 i 到交流道 j 抵達時間的分布可能為時段 k,k+1,…,k+M,M 表示 為車輛通過完整的區段所需的最大時間區間。因此為考量駕駛人速度不同 造成旅行時間不同之因素,Chang and Wu (1994) 加入了一變數 m( ) ij k θ 來反 應旅行時間不同對推估結果的影響,而在本研究中則是採用參數 m( ) ij k ρ 來 預測車輛到達型態,其定義如下: ( ) m ij k ρ :於(k-m)時段內產生的 Tij(k-m)中,由交流道 i 經過 m 個時段後在時 段 k 到達交流道 j 之車輛數佔 Tij(k-m)的比例。 0 m( ) 1 , 0 , 0,1,..., ij k i j N m M ρ ≤ ≤ ≤ < ≤ = (5) 0 ( ) 1 M m ij m k ρ = =∑
(6) 因此,考慮此參數後,下匝道的車輛數 yj(k)可改寫如式 (7) 所示,該 式充份的表現出 O-D 分布型態與路段流量之間的動態關係:1 0 0 1 0 0 ( ) ( ) ( ) ( ) ( ) ( ) , 1,2,..., j M m j ij ij m i j M m i ij ij m i y k T k m k q k m b k m k j N ρ ρ − = = − = = = − ⋅ = − ⋅ − ⋅ =
∑∑
∑∑
(7) 式 (8) 為主線道車輛數之關係式,該式亦須符合流量守恆之限制,並 可增加模式推估之顯著性:∑∑ ∑
∑∑
∑
= − = =+ = − = =+ − = − − = − + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = m m l i N l j m il ij i l M m l i N l j ij m il l N l k m k b m k q k q k U k q m k T k k U 0 1 0 1 1 0 1 1 0 1 1 ,..., 2 , 1 ), ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ρ ρ (8) 然而,Chang and Wu (1994) 的研究中,由於未知變數 bij(k)、ρijm( )k 會 隨著 M 值增加而增加,需要更多的資訊或是簡化模式才能提高即時環境下 的求解速率,因此,為了改善運算效率,採用巨觀的觀點,假設進入高速 公路的車輛速度在相同時間區間內可被分配在某個範圍裡,也就是各車輛 的旅行時間 (tij(k)) 差異不會太大,而是侷限在某一範圍內。 相較於該假設條件,本研究為能更符合真實的車流運行狀況,採用了 CTM 模式模擬真正的車流行為,藉以模擬路網中車輛之到達型態,進而 取代旅行時間相差不超過一個時段的假設。雖然,在過去的文獻中,通常 有考慮旅行時間的因素會視模式複雜度而有不同的假設,如:Lin and Chang (2005) 假設旅行時間呈某種分配來代表不同駕駛者對道路擁擠情況作不同的反應;而在 Lin and Chang (2007) 中,根據 Lin and Chang (2005) 的假設進一步利用累積密度函數來計算旅行時間。然而,不論是用何種假 設條件均無法確實的反應出車輛在路網中受到其他車輛干擾,導致不同駕 駛者速度變化對旅行時間的影響程度。 因此,本模式以中觀車流模式 CTM 預測車輛到達型態,較巨觀模式 更能模擬不同車流狀態下旅行時間的差異,也較微觀模式更能迅速地求 解。過去有許多學者針對 CTM 模式驗證其有效性,如 Sun et al. (2003) 利 用 CTM 模式為基礎轉換狀態-空間模式來估算公路路段中難以衡量位置 之車輛密度和擁擠型態。根據序列 Monte Carlo 方法發展出混合卡門濾波 演算法 (Mixture Kalman Filter Algorithm),求解近似非觀測之離散狀態的 轉換狀態-空間模式。而推估的結果顯示即時進行濾波演算是可行且有效 率的,且此模式的優點為推估的平均誤差達到 10%以下,且推估的結果與 每天變異的交通資料相符。
2.2 ARIMA 模型
本研究以 CTM 預測車輛到達型態時,需先預測各交流道之上匝道交 通量,故採用時間系列分析之自我迴歸整合移動平均模式 (ARIMA),以 時間變數本身來解釋其變化情形預測交通量,並供 CTM 模擬車輛到達型 態所用。
ARIMA模式係由 Box and Jenkins (1976) 提出,其模型為:
t q t p(B)Z C θ (B)a φ = + (9) 其中, p p p B φB φ B φ B φ ( )=1− − 2 −...− 2 1 ;θq(B)=1−θ1B−θ2B2 −...−θqBq; ) ,...., , (φ1 φ2 φp 為自我迴歸參數,(θ1,θ2,...,θq)為移動平均參數,c 為一常數, p、d、q 為非負整數,B 為後移運算子,Z 為上匝道交通量觀測值。 自我迴歸整合移動平均模式 (ARIMA) 主要為對歷史資料分析檢視 其自我相關及偏相關等特性,應用階段模式建構過程,在 ARIMA 模式中 選取一適當模式來做預測,其模式建立之程序: 1. 觀察數列資料平穩性 首先將收集到的資料依時間順序繪成圖型,觀察數列是否平穩,假 若數列在一定週期內,平均值隨時間而改變就是非平穩型時間數列,則 必須做適當的差分轉化為平穩型時間數列。 2. 差分 無定性時間數列經過適當的差分之後,轉化為穩定型時間數列,普 通差分運算如下: 第一次差分 t t t t Z Z B Z Z = − 1 =(1− ) ∇ − (10) 第二次差分
[
( 1) ( 1 2)]
2 − − − − − − = ∇ Zt Zt Zt Zt Zt =( −1 B)2Zt =Zt −2Zt−1+Zt−2 (11) 3. 計算 ACF 及 PACF以自我相關函數 (ACF) 及偏自我相關函數 (PACF) 決定 ARIMA 模式的階數 (p, q),當 ACF 無法很快消失時,顯示該數列為非平穩型時
間數列,故須先對數列取差分直到數列之 ACF 很快消失為止,即表示 數列已經差分後轉換為平穩型數列,此時所差分之次數以 d 表示,其次 再依樣本的 ACF 及 PACF 來決定 ARIMA (p, d, q) 中的 p 與 q 值,以判 斷數列應屬何種模型。
4. 暫定模式
自 我 迴 歸 整 合 移 動 平 均 模 式 (ARIMA) 是 由 自 我 迴 歸 過 程 (Autoregerssive) 與移動平均過程 (Moving Average) 兩者整合而成,如 果數列為非平穩數列,則必須先差分,故其暫定模式之形式為: t q t d p(B) Z C θ (B)a φ ∇ = + (12) 5. 模型鑑定 當一數列被鑑定為某種型態之模式後,利用統計理論對模式所含之 未知參數推算最佳或最有效估計值,並檢定所得模式與數據之配合是否 適當。 6. 預測 當一模型經估計、檢定並修正後,應用所得數列於預測所需資料, 為時間數列分析的最終目的。
2.3 卡門濾波模式
卡門濾波演算法係 Kalman (1960) 所提出,目前已被廣泛的應用在各 個不同的領域,在運輸領域中最常被應用在推估旅次起迄量與車流密度以 及匝道儀控等課題。卡門濾波就是一個資料處理的最佳遞迴演算法 (Optimal Recursive Data Processing Algorithm),係透過系統的噪音統計分配 和測量誤差的不確定性,以及任何可得的變數初始條件,來處理所有可得 的衡量值並無視其精確度,用以推估當期的變數值。 卡門濾波主要的概念是以遞迴方式來推估狀態變數,在給定 k 時段 下,利用狀態向量估計式來預測下一時段的狀態推估值 x-(k),並預測 k 時 段的觀測值 ˆ( )z k ,即可透過預測之觀測值與實際觀測值之間的誤差來更新 x-(k),更新後的狀態以 x+(k)表示之,隨後可利用 x+(k)再預測下一時段 k+1 的狀態 x-(k+1),繼續往下遞迴演算及推估,計算程序如圖 3 所示。ˆ( ) z k ( ) z k Δ 圖 3 卡門濾波狀態變數推估演算示意圖
卡門濾波是由狀態方程式 (State Equation) 和量測方程式 (Measurement
Equation) 所構成的,其中,狀態方程係由欲推估之變數所構成的關係式, 而量測方程則是反應出實際路段流量與狀態變數之間的相互關係。以本模 式而言,狀態變數便是(7)、(8)式中的 bij(k),而觀測值就是上匝道車輛數 yj(k)、下匝道車輛數 qi(k),以及主線道車輛數 Ul(k)所構成的關係式。因此, 狀態變數 bij(k)通常假設為隨機且獨立隨機漫步過程,可表示成如下的狀態 方程式: ) ( ) ( ) 1 (k b k w k bij + = ij + ij (13)
其中,wij(k):k 時段之狀態模式的白噪音 (white noise),且 E(wij(k)) = 0,Var(wij(k))
= D(k),並服從高斯分配 (Gaussian Distribution)。D(k) = diag[Db,...,Db],為 N(N+1) /2維度之 wij(k)的共變異矩陣。 量測方程式則是由實際路段與主線道流量 yj(k)、qi(k)、Ul(k)的關係式 所構成,並表示為下式所示: ) ( ) ( ) ( ) ('k H k b k e k z = + (14) 其中,z’(k)為量測變數,e(k)為 2N-1 維度的觀測誤差項,亦服從高斯分配 (Gaussian Distribution),且 E(e(k))=0,Var(e(k))=R(k)。R(k)=diag[r1,...,r2N-1], 為 2N-1 維度之 e(k)的共變異矩陣,H(k)為(2N-1)*(N(N+1)/2)的轉換矩陣, 係式(7)、(8)中的相對應元素,且 H(k)=Hk =[Hrsk](2N−1)* (N N+1)/ 2,而[H 除rsk] 如下矩陣元素外,其他矩陣元素均為 0。 [ k] rs H = , ( 1)/ 2 0 , ( 1)/ 2 0 ( ) ( ) 0 ( ) ( ) 0 M k m j Ni j i i i ij m M k m N l Ni j i i i il m H q k m k for i j N H q k m k for i l j N ρ ρ + − + = + + − + = = − ≤ < ≤ = − ≤ < < ≤
∑
∑
(15)以上為一常見的狀態空間系統 (state-space model),然而該模式為非線 性系統,必須以進階卡門濾波進行推估,以下是逐步的演算流程: 1. 初始化設定 X(0)=E[b(0)]N(N+1)/2*1 P(0)=Var[b(0)]N(N+1)/2* N(N+1)/2 2. 遞迴步驟 步驟 1:呼叫 CTM 模式所預測出的到達型態 m(k) ij ρ 。 步驟 2:計算矩陣:Hk、z’(k) (2 1)* ( 1)/ 2 , ( 1)/ 2 0 , ( 1)/ 2 0 1 2 1 1 1 1 1 2 1 [ ] ( ) ( ) 0 ( ) ( ) 0 '( ) [ ( ), , ( ), ( ) ( ), ( ) ( k k rs N N N M k m j Ni j i i i ij m M k m N l Ni j i i i il m N N N N H H H q k m k for i j N H q k m k for i l j N z z Z k y k y k U k q k U k q z ρ ρ − + + − + = + + − + = − − − = = − ≤ < ≤ = − ≤ < < ≤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ = = − − ⎢ ⎥ ⎢ ⎥ ⎣ ⎦
∑
∑
K K M )] T k 步驟 3:計算誤差共變數矩陣與卡門增益項 G(k): ( ) ( 1) ( 1) (T 1) ( 1) P k− = Φ −k P k+ − Φ k− +D k− 1 ( ) ( ) T( )[ ( ) ( ) T( ) ( )] G k =P k H k H k P k H k− − +R k − 步驟 4:更新狀態變數 ( ) ( ) ' ( )[ ( ) ( ) ( )] x k+ =x k− +α G k z k H k x k− − 步驟 5:截平面 (truncation) 與正規化 (normalization) 目的是為符合 O-D 推估模式的限制式,因此透過截平面與正 規化的方式使狀態變數符合介於 0 到 1 之間,且加總為 1 的條件。 0 1 ' MAX | 0 x k( ) G k z k( )[ ( ) H k x k( ) ( ) 1 α α α − α − ≤ ≤ ⎡ ⎡ ⎤ ⎤ = ⎣ ≤⎣ ⎦+ − ≤ ⎦1 1,..., 2 / 1,..., N i m mj j m i i mj mj m For m N x x x j m N β β = + = − = = = +
∑
步驟 6:重複上述步驟進行下個時階的 O-D 推估。2.4 格位傳送模式
2.4.1 模式描述 格位傳送模式 (CTM) 係由 Daganzo (1994) 所提出,用以預測車流在 空 間 與 時 間 上 的 流 動 如 車 隊 的 形 成 與 紓 解 等 。 模 式 假 設 有 一 均 質 (homogeneous) 路段,且路段上並無任何匝道可供車輛進出,故該路段上 車輛僅能由一段進入路段內並由另一段離開路段。將該道路分成數個同質 性的格位 (cell),從道路上游依序給予編號從 1 到 I,每個格位長度會依照 一般車輛在單位時間內所行走的距離而定,而該行走的距離亦可由車輛在 自由流的速率下推算而得。依照上述,車輛在自由流 (free flow) 的情況 下,可以隨著時間的推移前進至下一個格位內,不需要考量車輛在格位裡 的位置,其關係式如下: ) ( ) 1 (t n t ni + = i for t = 0, 1, 2, …, T (16) 其中,ni(t)為時間 t 時在格位 i 的車輛數;ni+1(t+1):時間 t+1 時,在格位 i+1 之車輛數。 上述情況發生在低交通流量時,亦即車輛能以自由流速率 (free flow speed)前進的情況下。當速率由於進入瓶頸路段而降低的時候,也就是道 路出現車隊排列時,模式則新增兩個變數 Ni (t) 及 Qi (t),以模擬擁擠時所 造成車流變化情況。Ni(t) 為各格位所能容納之最大車輛數,Qi (t) 則表示 格位所能通過之最大流量,因此,可以定義單位時間 t 內可以進入格位 i 之車輛數 yi (t)為下式:( )
t min{
n( ) ( ) ( ) ( )
t ,Q t ,N t -n t}
yi = -i1 i i i (17) 第一個變數表示格位 i-1 在時間 t 之車輛數,第二個變數Qi(t)表示格 位所能通過之最大流量。因此,Ni(t)- ni(t)為單位時間格位 i 車輛可以進入 的剩餘空間。 根據以上關係,求得當有車隊發生時,格位傳送模式之關係,當時間在 t+1 時之車輛數為格位 i 在時間 t 時之車輛數,符合能量守恆之概念,t 時階中格位 i 之車輛數加上流入與減掉流出之車輛數,關係式如下:
( )
t 1 n( ) ( )
t y t -y( )
t ni + = i + i i+1 (18) CTM 模式則是根據上式不斷依時間變化而產生遞迴關係,因此可以 透過遞迴模式了解每一時階中,存在於某格位裡的車輛數。 透過上述,每個格位之特性 (車輛數) 都是與上一時階及格位的函 數,這與 LWR 的流體模式之密度與流量有著相似的關係,此關係以一種 等腰梯形具體化的方式表示如圖 4,其關係式為: 圖 4 格位傳送模式流率及密度關係圖(
)
{
vk,q ,vk -k}
for 0 k k min q= max j ≤ ≤ j (19) 其中,v:自由車流速率,k :飽和密度,j qmax ≤kjv/2:最大流率。四種 交通狀態及其在圖 4 中的位置分別說明如下:(1)自由流:速率 = v、密度 = [0~k /3]、流率 = [0 ~ qj max];(2)輕微同步流:速率 = [ v/2, v]、密度=[k /3, j 2k /3]、流率 = qj max;(3)嚴重同步流:速率 = [v/5, v/2]、密度=[2k /3, j 5k /6]、流率 = [ qj max/2, qmax];(4)擁擠流:速率 = [0, v/5]、密度 = [5k /6, j j k ]、流率 = [0, qmax/2]。 本研究針對時階之設定,係考量格位長度與高速公路幾何條件加以設 計。時階愈長,格位長度也愈長。若格位長度過長,恐難以分析車流在兩 兩交流道間之運行行為。但若太短,則每一格位所能容納之車輛過少,在推算格位移動車流量時,易導致進整誤差,而且模擬時間也會大幅拉長。 因此,本研究在兼顧模擬精確度及模擬時間下,乃選定 6 秒作為時階 (Clock tick) 長度,並未嘗試針對不同時階長度進行分析。當然,不同時階 長度對精確度之影響,值得後續研究再加以研析。當完成時階及格位長度 設定後,即可以利用道路車流參數之訂定,獲得所需之資訊,包括:總通 過車輛數、總延滯及最大等候長度等。 2.4.2 預測車輛到達型態之應用 CTM 模式預測車輛到達型態運算概念如圖 4 格位儲存示意之關係所 示,將路段切成數個格位,假設起點為格位 i、迄點為格位 j,自 m 時段後 開始下匝道 j,由於每位駕駛者及路段旅行時間不一致的情況下,導致下 匝道時段不一,可能從 m, m+1, ..., M 時段,但是格位 i 通過格位 j 的車輛 數必須再由完整的路段車流狀況而定,非格位 i 至格位 j 之間自行決定的, 因此,CTM 模式需要計算及記錄每次且每個時段下匝道的車輛數,與流 過該起迄點之格位的總車輛數所佔的比例即為 m ij ρ 。 實際運算過程與格位中車輛的變化關係乃基於上述 CTM 基本概念, 再依據本研究之需求進一步擴展而成的。為能符合真實的車流運行行為, 各駕駛人的駕駛行為皆不盡相同,導致車輛行駛速度迥異,可能會造成路 網中產生車隊排列等候的情形,再加上 CTM 基本的概念只考慮直線路 段,而本研究額外考慮了上下匝道進出主線道的因素。因此主線與上下匝 道之格位傳送模式之概念如圖 5 所示,每個格位會再根據車輛的不同來源 被分割成數個小格,各個小格位中分別記錄了不同時段 m 與不同來源 qi 的車輛,這些車輛會依據路段的擁擠程度及格位容量限制進行運算,若無 發生車隊排列的情形,如自由車流,車輛旅行時間僅可能為一兩個時段; 然而,一旦發生了車隊排列,如擁擠車流,車輛的旅行時間便會依不同駕 駛者作出的不同反應而有所增減,因此到達時間可能會分布在 k+1,…, k+m 數個時段。 圖 5 CTM 模式預測車輛到達型態之格位示意圖 式 (20) 為本模式為考量上下匝道流量進出的影響所擴展的格位之車 輛傳遞關係式,當時間在 k+1 時之車輛數為格位 c 在時間 k 時之車輛數, 加上流入與流出的車輛數,關係式如下:
1 ( 1) ( ( ) ( )) ( ) ( ) c c c c c n k+ = n k −P k +Y k −y+ k (20) 1 ( ) ( ) ( ) 1 ( ) min{ ( ), ( ), [ ( ) ( )]} 2 1 ( ) min{ ( ), ( ), [ ( ) ( )]} 2 c c c c c c c c c i c c c Y k y k r k y k n k Q k N k n k r k q k Q k N k n k − = + = − = − (21) 其中,nc(k+1):時間 k+1 時格位 c 之車輛數;Pc(k):時間 k 下匝道的車輛 數;Yc(k):時間 k 可以進入格位 c 之車輛數;yc(k):時間 k 欲進入格位 c 之主線車輛數;rc(k):時間 k 欲進入格位 c 之匝道車輛數。 以上為 CTM 基礎概念與本模式考量觀點下的格位傳送模式,而以下 為 CTM 逐步演算流程: 步驟 1:初始化設定:設定路段長度、自由流速率、飽和密度、最大流量、 最大容量等相關參數,以及各上下匝道所對應的格位以及上匝道 的流量。 步驟 2:呼叫卡門濾波所推估出的 O-D 比例 bij(k)。 步驟 3:根據式 (20)、(21) 計算每個格位於每個時階所應傳遞的車輛數。 步驟 4:分別計算某時階不同起點於相同迄點抵達之比例 m(k) ij ρ 。 為了驗證 CTM 在不同車流狀況下車隊消散的型態,以四種交通狀況 進行模擬,假設有六個交流道之高速公路三車道路段,交流道位置為均勻 分布,自由流速度為 100 (km/hr),飽和密度為 400 (veh/km),6 秒為一時 階,格位長度為 1/6 公里,格位最大容量為每格位 67 輛車,最大流率為每 ㄧ時階通過 10 輛車,而此四種交通流量分別是自由流、輕微同步流 (light synchronized flow)、嚴重同步流 (heavy synchronized flow)、擁擠流。同步 流 (synchronized flow) 係由 Kerner and Herrmann (1998) 所提出的,主要 的概念為隨著交通量的增加,微小的車隊間干擾便會造成遠超過臨界流量 的影響,意思就是說,當交通量逐漸增加,路段上的車輛便會受到鄰近車 輛的影響,無法依照期望的駕駛速率行駛,於是就產生與其他車輛同步的 駕駛行為,各交通狀態之分布範圍如圖 6 所示。 因此,本研究為說明 CTM 模式能於不同的路段擁擠狀況正確的預測 路網中車輛到達型態之分布情形,特以圖 7 之三車道路網規模分別給予四 種不同的交通流量,藉由 CTM 模式模擬之車輛到達型態如下圖 6 所示, 其中橫軸表示時階,縱軸表示某一時階下交流道的車輛比,b0,7 表示由編 號 0 的交流道上高速公路而在編號 7 的交流道離開高速公路的比例,如 (a) 顯示在自由流的情況下到達迄點交流道 7 之車輛幾乎都是在一或二個時階
內就會抵達,然而,當車流量逐漸增加時,車隊消散的情形就會越明顯, 如圖中 (b) - (d) 顯示,到達迄點交流道 7 之車輛會隨著車流量的增加,到 達的時階就會越分散在數個時階。是故,CTM 模式能有效且正確的反應 出不同交通流量之到達型態的影響。 0 0.2 0.4 0.6 0.8 1 1.2 1 7 13 19 25 31 37 43 49 時階 到達率 b07 b17 b27 b37 b47 b57 b67 (a) 自由流 0 0.1 0.2 0.3 0.4 0.5 0.6 1 5 9 13 17 21 25 29 33 37 41 45 49 時階 到達率 b07 b17 b27 b37 b47 b57 b67 (b) 輕微同步流 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 1 6 11 16 21 26 31 36 41 46 時階 到達率 b07 b17 b27 b37 b47 b57 b67 (c) 嚴重同步流 0 0.05 0.1 0.15 0.2 0.25 0.3 1 5 9 13 17 21 25 29 33 37 41 45 49 時階 到達率 b07 b17 b27 b37 b47 b57 b67 (d) 擁擠流 圖 6 不同交通流量下車隊到達型態 圖 7 路網範例
2.5 O-D 推估模式與 CTM 之系統架構
本研究模式架構主要是透過 O-D 推估與 CTM 模式之間的遞迴關係來 完成整體研究架構,兩者的關係如圖 8 所示。先將路段偵測器獲得的即時 流量輸入 O-D 矩陣推估模式,其中即時的資料必須包括上下匝道與主線道 的流量,另外需要一組初始的 O-D 矩陣,由 O-D 矩陣推估模式可求得 bij(k),即為各個 O-D 起迄對 (O-D Pair) 之到達迄點的比例,再將 bij(k)值代入 CTM 模式當中,並輸入由 ARIMA 預測之上匝道流量,計算出車輛
實際到達型態 m( )
ij k
ρ ,再代回 O-D 矩陣推估模式,如此反覆遞迴計算,並
起始值:x(0)=x+(0)、P(0)=P+(0) 誤差共變數矩陣估計式: ( ) ( 1) ( 1) T( 1) ( 1) P k− = Φ −k P k+ − Φ k− +D k− 增益矩陣: 1 ( ) ( ) T( )[ ( ) ( ) T( ) ( )] G k =P k H k H k P k H k− − +R k − 誤差共變數矩陣更新式: ( ) ( ) ( ) ( ) ( ) P k+ =P k− −G k H k P k− ( ) m ij k ρ 狀態向量更新式: ( ) ( ) ' ( )[ ( ) ( ) ( )] x k+ =x k− +α G k z k −H k x k− 狀態向量估計式: ( ) ( 1) ( 1) x k− =x k+ − +w k− ( ) m ij k ρ′ ( ) ij b k′ i ij ij N i j ij i k b k b k b β β / ) ( ) ( ) ( 2) -N to 1 (i : 1 = = = ∑=+ 正規化 圖 8 整體演算流程圖 其中,停止條件為: [ n1( ) n( )]2 0.05 ij ij i j b − k b k− <
∑∑
,其中 n 為第 n 次遞迴 運算結果,或是遞迴次數達到 500 次。此遞迴條件中,變動的條件為當程 式執行完ㄧ次會有新的 bij’(k),若不再收斂條件內即重新以 bij’(k)繼續往下 運算,直到達收斂條件為止。三、簡例驗證與敏感度分析
本節以簡單的小型封閉式路網進行模式驗證,首先說明路網設計與資 料來源,接著透過小型路網進行驗證,檢視模式的適用性與精確性;其次, 正規化:針對不同的情境設計對模式進行敏感度分析,如交通流量多寡與不同交流 道佈設方式,視其對推估結果準確率的影響。
3.1 簡例驗證
1. 路網說明 本研究先以小型路網進行模式驗證,如下圖 9 所示。此路網路段總 長 7,000 公尺,主線為 3 車道,共有 8 個節點,各有 3 個起點與迄點, 6組起迄對 (O-D pair),分別為 b1,7、b1,8、b1,6、b7,8、b7,6、b8,6。其中, bi,j (或簡化表為 bij) 代表起點 i 至迄點 j 的起迄流量比例。各路段長度與 格位位置對應如圖 9 所示。 CTM參數設定為:以 6 秒為一時階,自由流速率為 V = 100 (km/hr), 飽和密度為 400 (veh/km),格位單位長度為 1/6 (km),並假設同一交流 道之上、下匝道間隔 500 公尺 (3 個格位)。格位最大容量 N = 67 (veh/cell),最大流率 Q = 10 (veh/time click) (相當於交通量 6,000pcu/hr 或每車道 2,000pcu/hr)。 圖 9 小型路網示意圖 2. 資料來源 本研究係透過交通模擬指派軟體來產生依時性路段流量資料,藉此 模擬出本研究構建的推估模式所需之相關初始輸入資料,如上下匝道與 主線道之依時性流量等資料,另以 ARIMA 預測未來上匝道交通量供 CTM 模擬車輛到達型態使用,並利用國內所自行研發之交通模擬指派軟體 DynaTAIWAN 進行模擬。DynaTAIWAN (Dynamic Traffic Assignment and Information in Wide Area Network) 主要參考 DYNASMART 和
民國 92 年開始進行系統設計,持續進行核心模擬程式開發,是一中觀 的車流模式,主要用以描述個體行為的決策之依時性流量變化情形。 初始資料設定先行以一組假設之起始 O-D 資料作為基礎,配合圖 9 的路網節點與節線的屬性資料,模擬具有尖離峰特性之 90 分鐘交通需 求量 (如圖 10),用以產生依時性的路段流量資料。以此初始資料為基 礎,進行模式驗證,實際操作流程說明如下: 0 500 1000 1500 2000 2500 3000 3500 0 10 20 30 40 50 60 70 80 90 時間(分) 交通 量(輛 /小 時) 圖 10 尖離峰交通需求分布型態 由於 DynaTAIWAN 與 CTM 兩模式皆為中觀車流模式,故兩模式皆以 6秒為一時階,ARIMA 則以 5 分鐘為一時階預測上匝道交通量,並假設 5 分鐘內交通量均勻分布,EKF 模式亦配合 CTM 模擬時階進行推估,並於 最後結果彙整成為 5 分鐘時階,以利交通管理人員執行適當的管理策略。
本研究以均方根誤差 (Root Mean Square Error, RMSE) 衡量本模式
之績效指標,檢視實際或假定的 *( ) ij b k 與推估的 ˆ ( )b k 之間的誤差,RMSEij 計算標準如下式所示: 1 * 2 1 1 1 ˆ ( ( ) ( )) ( 1) N N T ij ij i j i k b k b k RMSE N N T − = = + = − = −
∑ ∑ ∑
(22) 另外,為檢視其推估結果於統計上有無顯著的績效結果,特以卡方檢 定(Chi-Square Test) 作為另ㄧ衡量標準,計算方式如下: * 2 2 1 ( ) T ij ij k ij b b b χ = − =∑
(23)而下列所呈現的結果為上述小路網之預測與推估的結果,以此簡例而 言,本模式的績效約為 0.071。 為檢視不同的起始值設定對模式推估績效之影響,本研究分別比較測 試兩種初始值給定方式:第一種係以亂數隨機產生一組初始值,將同一時 段同一起點的上匝道流量,隨機分配至不同目的地。另一種則是以平均方 式,平均設定其比例值。以端點 1 為起點的三組起迄對為例 (即 b1,7、b1,8、 b1,6),若以隨機產生方式,隨機產生三組對應亂數:0.2、0.9 及 0.5 為例, 則 b1,7 = 0.2/(0.2+0.9+0.5) = 0.125、b1,7 = 0.9/(0.2+0.9+0.5) = 0.563、b1,7 = 0.5/(0.2+0.9 +0.5) = 0.312。若以平均方式,則三組起迄對之初始值均設為: 0.333。以 b1,7為例 (即由編號 1 的交流道上高速公路而於編號 7 的交流道 離開高速公路的車輛比例),圖 11 為兩種初始值設定方式之各時段推估結 果。由圖知,無論那一種初始值設定方式,均可推估得與實際值相當接近 之預測值。圖 12 則進一步以 b1,8為例,在第 264 時階時,反覆運算之收斂 過程。由圖知,大約遞迴 67 次,即可呈現收斂結果。表 1 則進一步列出 各個起迄對在各時階之推估結果平均值與標準差。由表知,兩種不同初始 值設定方式所推估平均值與標準差皆差異不大。平均績效指標 RMSE 分別 為 0.087 與 0.068,即以隨機產生的初始值之推估績效較佳。惟根據卡方檢 定結果,顯示不同起始值所推估之所有起迄對皆與實際值,不具有顯著之 差異。此一結果也顯示,本研究所提模式,對於初始值之設定方式,敏感 性不大。 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 時間(分) OD比例值 實際值 平均分配 隨機產生 圖 11 三種初始值設定所推估之 b1,7
0.32997 0.32998 0.32999 0.33 0.33001 0.33002 0.33003 1 12 23 34 45 56 67 78 89 100 111 122 133 144 155 166 177 188 199 遞迴次數 OD比例值 圖 12 時階 k=264 時 b1,8的遞迴收斂情形 (隨機產生初始值方式) 表 1 實際值與不同初始值設定推估結果比較表 實際值 平均分配 隨機產生 起迄對 平均值 標準差 平均值 標準差 平均值 標準差 b1,7 0.212 0.047 0.181 0.037 0.218 0.043 b1,8 0.317 0.010 0.326 0.084 0.290 0.055 b1,6 0.471 0.057 0.492 0.064 0.492 0.062 b7,8 0.404 0.025 0.445 0.104 0.440 0.096 b7,6 0.596 0.025 0.555 0.104 0.560 0.096 b8,6 1 0 1 0 1 0 RMSE ─ 0.087 0.068 2 χ ─ 1.880 2.043 註: 2 23.685 14 , 05 . 0 2 *χ >χ = 。 4. 旅行時間分析 駕駛人之駕駛行為與速率皆不盡相同,導致於路網中旅行時間也不 ㄧ樣,而過去的非指派模式動態 O-D 推估的文獻中,除了不斷精進模式 建構方法外,亦針對旅行時間的推估進行許多的調查與研究,例如學者 Chang等人自 1994 年一直到 2007 年作過ㄧ系列的研究,根據 1994 年所 建立的模式改善旅行時間的推估方式,陸續增進動態 O-D 推估的正確性。 為了考慮此因素對推估結果的影響,本研究亦以 Chang and Wu (1994) 的模式為基礎,然而,其中旅行時間的推估方式為利用路段兩 端點的平均流量代表該路段流量,進而求得路段平均旅行時間,且假設 其分布於兩時階內。此旅行時間推估的方式過於簡略,也無法真實反應 實際路網中車輛運行的狀況,基此,本研究採用中觀車流模式 CTM 來 預測車輛到達型態。
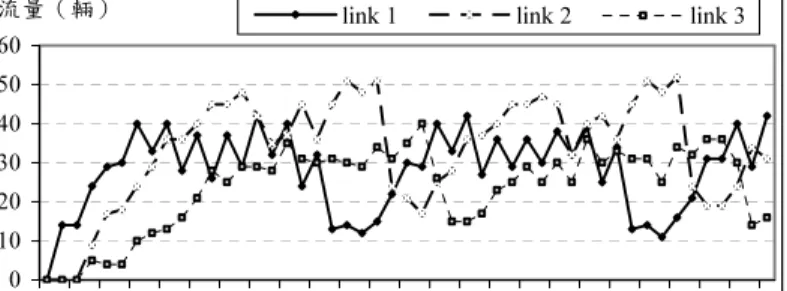
為比較 CTM 模式預測之精確度與動態 O-D 推估結果之正確性,另 以 Greenshields 之 speed-density 模式來進行旅行時間的估算,並與 Chang and Wu (1994) 的假設相同,皆假設其到達型態分布在兩個時階 內。其 Speed-density 模式如:u =uf(1−k/kf)。 根據上述簡例驗證之路網與情境,進行數個時階之不同旅行時間推 估方法之探討,首先由圖 13 可以看出不同路段流量分布的情形,並以 此流量以 Greenshields 之 speed-density 模式估算路段行駛速率進而推導 出路段旅行時間,估算之結果如圖 14 所示,藉由 Greenshields 模式算 出各起迄對的旅行時間,並使其分布於前後兩時階內,其中橫軸表示時 階,縱軸表示路段流量。 0 10 20 30 40 50 60 5 20 35 50 65 80 95 110 125 140 155 170 185 200 215 230 245 時間(分)
流量(輛) link 1 link 2 link 3
圖 13 路段流量關係圖 圖 14 以 Greenshields 模式所估算的 每個 O-D pair 之車輛到達型態 0 0.1 0.2 0.3 0.4 0.5 0.6 48 49 50 51 52 53 54 55 56 57 58 59 60 時間(分) OD比例值 b0,1 b0,2 b0,3 b1,2 b1,3 b2,3
以此估算之車輛到達型態進行 O-D 比例值推估,結果僅以 b1,8為代表 說明之,此例於前 20 分鐘內流量較少時,因此推估結果較為精確,但隨 著流量逐漸的增加,路段慢慢呈現擁擠的狀況,此時以 Greenshields 模式 所推算出的旅行時間及到達時間分布在兩時階內的假設,則顯得較不合 理。因此,圖 15 後面的時階推估的結果便會失真,導致整體平均 RMSE 高達 0.145,遠高於本研究所提模式之推估績效 (RMSE=0.068)。 圖 15 應用 Greenshields 模式之推估值與 實際值之分布差異 (以 b1,8為例) 由上述結果可知,若依據 Chang and Wu (1994) 假設路網中的車輛旅 行時間前後相差不超過 2 個時階且以 Greenshields 模式進行平均旅行時間 推估,則在離峰交通需求下,仍可達到一定程度之準確度。但在尖峰交通 需求時,其推估之旅行時間及到達型態,便會與實際車流行為差異甚大, 導致起迄對比例推估誤差變大。可見,本研究藉由 CTM 模式進行車輛到 達型態預測,將更能符合真實路網車輛運行行為,達到較精確之動態起迄 矩陣之推估結果。
3.2 敏感度分析
為了解本研究的績效與限制,特設計以下不同的情境,進行模式敏感 度分析。首先為檢視本模式是否能於確實應用於路網擁擠的情況,透過路 網需求量的增減來調整路網的車流型態,以作模式的敏感度分析。另外, 於 CTM 模式中測試不同的上匝道比例限制對車輛到達型態的影響及推估 結果的變化。 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 時間(分) OD 比例值 實際b1,8 推估b1,83.2.1 不同交通流量之敏感度測試 本研究採用圖 9 小型的封閉式路網作為不同交通需求量變化對模式 推估的影響。該路網假設為主線道有 3 車道,且主線的速率為 100KPH, 上下匝道速率為 40KPH,以每 6 秒為一模擬時階,欲推估 90 分鐘的 O-D 比例值,其於參數設定如上,並依據不同的交通流量,自由流、輕微同 步流、嚴重同步流、擁擠流,進行敏感度分析,結果如圖 16 所示 (僅以 b78為代表): 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 時間(分) OD比例值 自由流 輕微同步流 嚴重同步流 擁擠流 圖 16 不同交通流量下之推估結果 表 2 為實際值與不同交通流量推估結果比較表,由表中可觀察出兩者 不同初始值設定之標準差與平均數皆無很大的差異;RMSE 績效指標大約 都為 0.08 左右,隨著交通流量的增加其推估正確率會有極輕微的減低;於 Chi-square test中,假設 95%的信賴區間下所有的 O-D pair 皆與實際值在 統計上沒有顯著的差異。 表 2 實際值與不同交通流量推估結果比較表 真實值 自由流 輕微同步流 嚴重同步流 擁擠流 起迄對 平均值 標準差 平均值 標準差 平均值 標準差 平均值 標準差 平均值 標準差 b17 0.211 0.048 0.202 0.059 0.168 0.054 0.227 0.029 0.206 0.026 b18 0.317 0.010 0.364 0.080 0.337 0.087 0.287 0.074 0.294 0.027 b16 0.472 0.058 0.434 0.061 0.494 0.063 0.486 0.074 0.499 0.049 b78 0.403 0.024 0.378 0.100 0.420 0.123 0.415 0.113 0.317 0.056 b76 0.597 0.024 0.622 0.100 0.580 0.123 0.585 0.113 0.683 0.056 b86 1 0 1 0 1 0 1 0 1 0 RMSE 0.081 0.083 0.084 0.067 2 χ 2.812 2.625 2.343 1.708 註:* 2 2 0.05,16 26.296 χ >χ = 。
四、實例應用
本節為說明本模式亦能於實際高速公路路網進行 O-D 推估,以下面進 行實例應用,係路網長度較短的楊梅-泰山收費站北上方向之中型路網, 路網與資料來源以及推估績效並說明如下。並試圖應用於路廊較長的大型 路網臺中-臺北交流道,以茲證明本模式適用性。4.1 路網與資料說明
以國內國道一號高速公路楊梅至泰山收費站北上方向為中型路網模 式驗證範圍,詳細路網如圖 17 所示,此路網有 6 個交流道,依序是楊梅、 幼獅、中壢、機場、桃園、林口交流道,全長為 40 公里,共計有 20 個節 點,25 條節線,28 組 O-D 起迄對 (O-D pair)。以 6 秒為一模擬時階,令 自由流 v=100 (km/veh),飽和密度為 400 (veh/km),三車道之最大流量為 6,000 (veh/hr),格位單位長度為 1/6(km),格位最大容量 N=67 (veh/cell), 最大流率 Q=10 (veh/t),再依式 (13) 反覆計算格位中每時階的車輛傳送過 程。以實際 O-D 比例作為起始值的產生方式。 圖 17 楊梅至泰山收費站路網圖與格位對應圖 路段流量及上下匝道資訊是推估 bij(k) 必要的資訊,然而,實際路網 之動態起迄旅次矩陣難以取得,又為進行高準確度的起迄矩陣推估,故採 以運輸規劃模擬軟體來產生較符合真實路網條件下之交通流量。本研究以 國內自行研發之交通模擬指派軟體 DynaTAIWAN 來產生依時性流量資 料,藉此模擬出本研究構建的推估模式所需之相關依時性流量資料,並以 ARIMA預測未來上匝道交通量,作為 CTM 模擬車輛到達型態資料。以國內實際高速公路全日旅運需求量的尖離峰比例為代表,儘可能以 符合實際的道路交通流量為基礎,該組高速公路全日旅運量資料來自陳敦 基 (2010) 調查推估之全日旅運需求量。 該資料全日旅運量調查結果如圖 18 所示,由楊梅交流道北上之車流 量為該六個交流道當中最多的,最低的為內壢北上之流量。為了解每小時 各交流道之車流量占全日旅運量的比例,以偵測器蒐集之全日分時段之流 量換算,以得各小時全日旅運量之比例 (如圖 19),上午尖峰 7-9 時所占全 日交通量比例約 0.168,下午流量最大者為 15-17 時所占的比例約 0.153。
4.2 實際路網推估結果
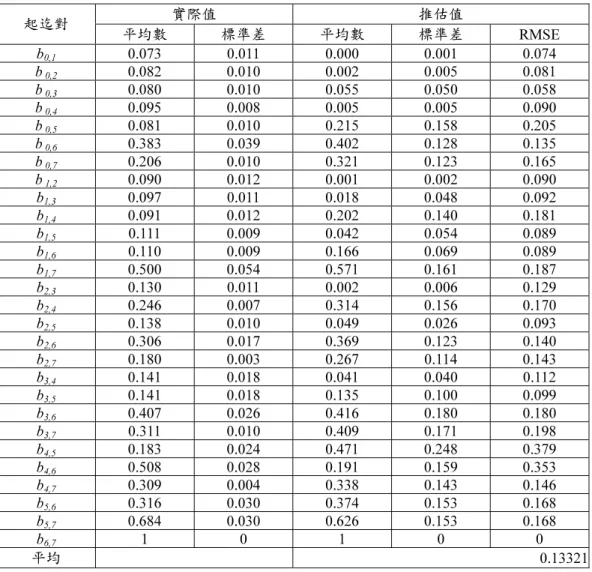
以此中型路網而言,為推估實際上午尖峰時段 (7-9 時) 之 O-D 比例值, 並透過尖峰時段流量占全日流量之比值,與該組調查之全日旅運需求量之乘積 (0.168) 作為本模式產生路段流量之依據。 以起迄對 b2,7(k)為例,推估結果如圖 20 所示,b2,7(k)所推估的結果除 部分時階誤差仍有待改善外,大致上都與實際之 b2,7(k)呈現類似的分布型 態,表示推估的結果確實能掌握真實的起迄對分布比例。 0 2000 4000 6000 8000 10000 12000 14000 楊梅 幼獅 平鎮 中壢 內壢 桃園 林口 楊梅 幼獅 平鎮系統 中壢 內壢 桃園 圖 18 楊梅至泰山全日旅運需求量調查結果0 0.02 0.04 0.06 0.08 0.1 0.12 0 2 4 6 8 10 12 14 16 18 20 22 時段(小時) 交通量比例 圖 19 偵測器每小時占全日路段流量之比例 圖 20 各時段 b2,7(k)推估值與實際值之比較
整體 RMSE 為 0.133,詳細的 RMSE 如表 3 所示,僅部分 bij(k)的 RMSE
變化的幅度較大,其餘大部分結果皆很穩定。
4.3 大型實際路網-臺中至臺北交流道
以國內國道一號高速公路臺中至臺北收費站北上方向為大型路網模 式驗證範圍,此路網有 19 組交流道,全長為 153 公里,共計有 56 個節點,
73 條節線,190 個 O-D 起迄對。以 6 秒為一模擬時階,令自由流 v=100
(km/veh),飽和密度為 400 (veh/km),三車道之最大流量為 6,000 (veh/hr), 格位單位長度為 1/6 (km),格位最大容量 N=67 (veh/cell),最大流率 Q=10 (veh/t),詳細路網格位對照如表 4 所示,再依式 (13) 反覆計算格位中每時 階的車輛傳送過程。以實際 O-D 比例作為起始值的產生方式,其它資料來 源如同中型路網。 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 時間(分) OD 比例值 實際b2,7 推估b2,7
表 3 實際值與推估值績效值 實際值 推估值 起迄對 平均數 標準差 平均數 標準差 RMSE b0,1 0.073 0.011 0.000 0.001 0.074 b 0,2 0.082 0.010 0.002 0.005 0.081 b 0,3 0.080 0.010 0.055 0.050 0.058 b 0,4 0.095 0.008 0.005 0.005 0.090 b 0,5 0.081 0.010 0.215 0.158 0.205 b 0,6 0.383 0.039 0.402 0.128 0.135 b 0,7 0.206 0.010 0.321 0.123 0.165 b 1,2 0.090 0.012 0.001 0.002 0.090 b1,3 0.097 0.011 0.018 0.048 0.092 b1,4 0.091 0.012 0.202 0.140 0.181 b1,5 0.111 0.009 0.042 0.054 0.089 b1,6 0.110 0.009 0.166 0.069 0.089 b1,7 0.500 0.054 0.571 0.161 0.187 b2,3 0.130 0.011 0.002 0.006 0.129 b2,4 0.246 0.007 0.314 0.156 0.170 b2,5 0.138 0.010 0.049 0.026 0.093 b2,6 0.306 0.017 0.369 0.123 0.140 b2,7 0.180 0.003 0.267 0.114 0.143 b3,4 0.141 0.018 0.041 0.040 0.112 b3,5 0.141 0.018 0.135 0.100 0.099 b3,6 0.407 0.026 0.416 0.180 0.180 b3,7 0.311 0.010 0.409 0.171 0.198 b4,5 0.183 0.024 0.471 0.248 0.379 b4,6 0.508 0.028 0.191 0.159 0.353 b4,7 0.309 0.004 0.338 0.143 0.146 b5,6 0.316 0.030 0.374 0.153 0.168 b5,7 0.684 0.030 0.626 0.153 0.168 b6,7 1 0 1 0 0 平均 0.13321 表 4 路網格位對照表 交流 道 節點編號 里程數 匝道 下 匝道 上 交流道 節點編號 里程數 匝道 下 匝道 上 臺中 1 178K - 1 楊梅 48 69 K 682 685 大雅 39 174 K 25 28 幼獅 49 67 K 697 700 豐原 40 168 K 64 67 平鎮 50 65 K 712 715 后里 41 160 K 115 118 中壢 51 62 K 733 736 三義 42 150 K 178 181 內壢 52 57 K 766 769 苗栗 43 132 K 289 292 桃園 53 49 K 817 820 頭份 44 110 K 424 427 林口 54 41 K 868 871 新竹 45 95 K 517 520 五股 55 33 K 919 922 竹北 46 91 K 544 547 三重 56 27 K 958 961 湖口 47 83 K 595 598 臺北 38 25 K 1,081 -
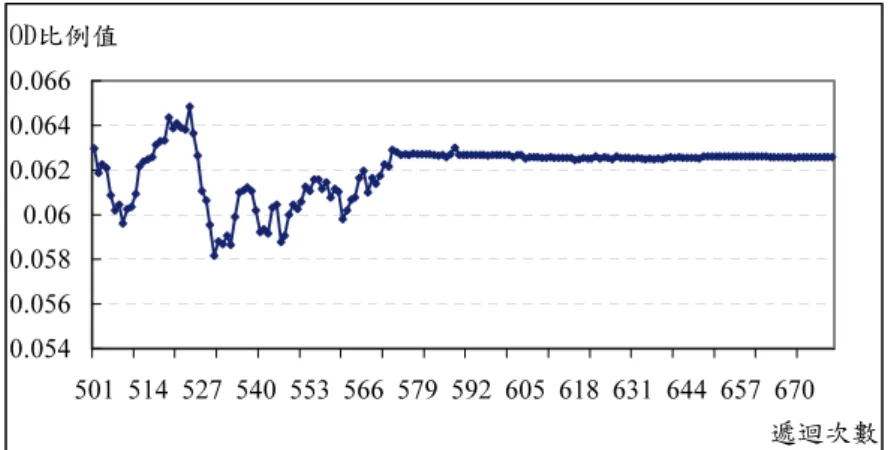
圖 22 為 b1,38 (即臺中至臺北交流道的起迄對) 於時階 k = 896 時之遞迴 運算收斂過程。由圖知,大約經過 570 次遞迴次數後,起迄對比例值方呈 現收斂現象。此與前述小規模路網時,所有起迄對在 500 次遞迴次數內, 均可達到收斂,顯有不同。亦即當應用路網之規模愈大時,CTM 與 EKF 間之所需之遞迴次數會愈多,方能達到收斂狀態。以本大型路網而言,整 體的績效指標 RMSE 為 0.125,應可算是相當準確之推估結果。 0.054 0.056 0.058 0.06 0.062 0.064 0.066 501 514 527 540 553 566 579 592 605 618 631 644 657 670 遞迴次數 OD比例值 圖 22 時階 k=896 時 b1,38 (臺中至臺北) 的遞迴收斂情形
五、結論與建議
本研究採用 Chang and Wu (1994) 所建立的推估模式為基礎,結合中 觀車流理論中之格位傳送模式 (CTM) 來預測車輛到達型態,改善上游路 段與下游匝道時間差 (Time Lag) 的因素,同時增加推估旅行時間方法之 客觀性與求解效率。本模式以進階卡門濾波 (EKF) 與格位傳送模式建構 之,係ㄧ非指派模式無須仰賴大量的歷史 O-D 矩陣資料以及可靠之交通量 指派模式。透過兩者遞迴演算之過程,一方面迅速進行 O-D 推估,另一方 面則模擬車流行為,預測車輛到達型態,藉此更能合理的推估動態起迄旅 次矩陣。為比較本模式於旅行時間預測之績效,以 Greenshields 巨觀模式 預測車輛旅行時間並假設進入路網之車輛會於兩時階範圍內到達迄點。結 果顯示本模式推估結果之 RMSE 為 0.071 遠低於 Greenshields 之 0.145。此 外本研究亦針對不同交通流量及高速公路路網設計作敏感度分析,結果顯 示本模式推估之正確率會隨著交通流量增加而有些微的減低;然而,不同 交流道路網的設計並未對演算法之績效有顯著的影響。實際應用於國道 1 號之高速公路路廊上,結果顯示不論何種路網規模,RMSE 仍在可接受範 圍內,分別為 0.133 與 0.125。後續研究方向建議如下:為避免格位長度過長,而難以分析兩兩交流 道間之車流行為,本研究設定 CTM 的時階長度為 6 秒。但在利用 ARIMA 進行上匝道交通量預測時,因需要較長之預測長度 (長達 1 小時),故以 5 分鐘為一預測單位。因此,在輸入 CTM 時必須假設 5 分鐘內的交通量是 均勻到達型態,方可獲得每 6 秒之上匝道交通量資料。後續研究可進一步 考量將此兩模式之時階予以同步化,以避免不同時階時,均勻到達型態之 不合理假設。此外,為能改善模式推估績效,可考慮建立收斂機制以控制 誤差範圍與反應偵測器之誤差,適度調整 EKF 模式誤差增大無法回復之情 形。另外,也可考慮利用不同的預測模式來進行旅行時間的估算,以提升 起迄矩陣推估之準確度。未來更可以進ㄧ步朝向建構具有路徑選擇的推估 與預測模式,期能進ㄧ步應用於一般都市路網。最後,由於國內缺乏真實 之起迄及路段交通量資料,故本研究必須透過 DynaTAIWAN 進行驗證。 俟我國全面實施匝道閉闔式電子自動收費時,即可蒐集所需即時交通起迄 及路段流量資料,以進行本模式之應用與驗證。
參考文獻
曾國雄、卓訓榮、周幼珍、江勁毅 (1997),「動態流量推估動態 O-D 方法 之研究」,運輸計劃季刊,第二十六卷第四期,頁 615-638。 陳敦基 (2010),高速公路按里程電子收費通行費率之研究,交通部臺灣區 國道高速公路局委託研究計畫。Bell, M. (1991), “The Estimation of Origin-destination Matrices by Constrained Generalized Least Squares,” Transportation Research Part B: Methodological, Vol. 25, No. 1, pp. 13-22.
Box, G. E. P. and Jenkins, G. M. (1976), Time Series Analysis: Forecasting and Control, San Francisco: Holden-Day.
Chang, G. L. and Tao, X. (1996), “Estimation of Dynamic O-Ds for Urban Networks,” Proceedings, 13th International Symposium on Transportation and Traffic Theory, Vol. 13, pp. 1-20.
Chang, G. L. and Tao, X. (1999), “An Integrated Model for Estimating Time-Varying Network Origin-destination Distribution,” Transportation Research Part A: Policy and Practice, Vol. 33, No. 5, pp. 381-399.
Chang, G. L. and Wu, J. (1994), “Recursive Estimation of Time-varying Origin-destination Flows Traffic Counts in Freeway Corridors,” Transportation Research Part B: Methodological, Vol. 28, No. 2, pp. 141-160.
Cremer, M. and Keller, H. (1987), “A New Class of Dynamic Methods for the Identification of Origin-destination Flows,” Transportation Research Part B: Methodological, Vol. 21, No.2, pp. 117-132.
Daganzo, C. F. (1994), “The Cell Transmission Model: A Dynamic Representation of Highway Traffic Consistent with the Hydrodynamic Theory,” Transportation Research Part B: Methodological, Vol. 28, No. 4, pp. 269-287.
Fisk, C. S. (1988), “On Combining Maximum Entropy Trip Matrix Estimation with User-optimal Assignment,” Transportation Research Part B: Methodological, Vol. 22, No. 1, pp. 69-73.
Kalman, R. E. (1960), “A New Approach to Linear Filtering and Prediction Problems,” Transactions of the ASME - Journal of Basic Engineering, Vol. 82, No. D, pp. 35-45.
Kerner, B. S. and Herrmann, M. (1998), “Local Cluster Effect in Different Traffic Flow Models,” Physica A: Statistical Mechanics and its Applications, Vol. 255, No. 1-2, pp. 163-188.
Lin, P. W. and Chang, G. L. (2005), “A Robust Model for Estimating Freeway Dynamic Origin-destination Matrix,” Transportation Research Record: Journal of the Transportation Research Board, No. 1923, pp. 110-118. Lin, P. W. and Chang, G. L. (2007), “A Generalized Model and Solution
Algorithm for Estimating Dynamic Freeway Origin-destination Matrix,” Transportation Research Part B: Methodological, Vol. 41, No. 5, pp. 554-572.
Maher, M. (1983), “Inferences on Trip Matrices from Observations on Link Volumes: A Bayesian Statistical Approach,” Transportation Research Part B: Methodological, Vol. 17, No. 6, pp. 435-447.
Nguyen, S. (1984), “Estimating Origin-Destination Matrices from Observed Flows,” in Florian, M. (Eds.), Transportation Planning Models, Amsterdam: Elsevier, pp. 363-380.
Nguyen, S., Morello, E., and Pallottino, S. (1988), “Discrete Time Dynamic Estimating Model for Passenger Origin-destination Matrices on Transit Network,” Transportation Research Part B: Methodlogical, Vol. 22, No. 4, pp. 251-260.
Nihan, N. L. and Davis, G. A. (1987), “Recursive Estimation of Origin-destination Matrices from Input/output Counts,” Transportation Research Part B: Methodological, Vol. 21, No. 2, pp. 149-163.
Nihan, N. L. and Davis, G. A. (1989), “Application of Prediction-Error Minimization and Maximum Likelihood to Estimate Intersection OD Matrices from Traffic Counts,” Transportation Science, Vol. 23, No. 2, pp. 77-90.
Okutani, I. (1987), “The Kalman Filtering Approaches in Some Transportation and Traffic Problems,” Proceedings, 10th International Symposium on Transportation and Traffic Theory, pp. 397-416.
Sun, X., Munoz, L., and Horowitz, R. (2003), “Highway Traffic State Estimation Using Improved Mixture Kalman Filters for Effective Ramp Metering Control,” Proceedings, 42nd IEEE Conference on Decision and Control, pp. 6333-6338.
Van Zulylen, H. and Willumsen, L. G. (1980), “The Most Likely Trip Matrix Estimated from Traffic Counts,” Transportation Research Part B: Methodological, Vol. 14, No. 3, pp. 281-293.
Willumsen, L. G. (1984), “Estimating Time-dependent Trip Matrices from Traffic Counts,” Proceedings, 9th International Symposium on Transportation and Traffic Theory, pp. 397-411.