Volume 24, No.3, 2019, pp. 197- 210 DOI:10.6574/JPRS.201909_24(3).0005
1 國立臺灣海洋大通訊與導航工程學系 大學生 收到日期:民國 108 年 01 月 17 日
2 國立臺灣海洋大學通訊與導航工程學系 副教授 修改日期:民國 108 年 04 月 17 日
* 通訊作者, E-mail: [email protected] 接受日期:民國 108 年 07 月 03 日
運用 DSRC 與 GNSS RTK 技術於汽車避撞之應用
林奕秀
1劉瑋傑
1林修國
2*摘要
車對車(Vehicle-to-vehicle, V2V)防碰撞警示在無法有通視的情形下,可利用即時高精度定位搭配車間 的即時通訊來達成,本研究結合 RTK 技術及 DSRC 技術來達成上述需求。在進行 GNSS RTK 時,車輛 上之 GNSS 接收器接收於採集衛星數據時,亦接收來自基準站觀測數據和測站信息,並在系統內對此兩 組數據進行相對定位即時運算以實現高精度定位;而 DSRC 技術則使車輛能在數十公尺內進行直接雙向 的訊息傳遞,且提供高速的數據傳輸,確保車輛在高速移動的情況下保有信息傳遞的實時性。結合此二技 術應用於車對車防碰撞警示系統,使駕駛者有足夠的反應時間,避免交通事故發生。
關鍵詞:專用短程通信技術、全球導航衛星系統、即時動態定位技術
1. 研究動機
隨著科技的進步與網路的發達,物聯網(Internet of Things, IoT)的概念已成為新興科技的主流,而車 聯網(Internet of Vehicles, IoV)則是物聯網在交通領 域的應用。本研究乃是探討車聯網的部分技術─車 對車(Vehicle-to-vehicle, V2V)防碰撞警示系統,利 用 RTK 技術實現即時高精度定位,並利用 DSRC 技術達成各車輛間資訊的即時相互傳輸,串接車輛 資訊與行動網路,進而在車輛發生碰撞前對駕駛人 做出警示,以降低車禍發生的機率。
2. 研究背景
2.1 專 程 短 程 通 信 技 術 (Dedicated Short Range Communications, DSRC)
圖 1 Commsignia V2X OBU
本系統採用 Commsignia 公司所推出的車載設 備(OnBoard Units, OBU),如圖 1,其所採用之技術 為 DSRC。DSRC 技術是一種應用在車間通訊及車 路通訊的無線通信技術,其工作在 5.9 GHz 時通信 範圍可擴展至 1,000 m,數據傳輸速率也提高至 6~
27 Mbit/s (MBA 智庫百科,2018)。
此技術所使用之通訊協定為由 IEEE 802.11 標 準擴充的 IEEE 802.11p,能夠提供高速的數據傳輸,
使車輛能在數十公尺內進行直接的雙向訊息傳遞,
且過程中無需透過主機,並保證通信鏈路的低延遲 及系統的可靠性,故能確保車輛在高速移動的情況 下保有信息傳遞的即時性(林修國等,2017)。
2.2 全球導航衛星系統(Global Navigation Satellite System, GNSS)
GNSS 包 含 美 國 的 全 球 定 位 系 統 (Global Positioning System, GPS)、俄羅斯的全球導航衛星系 統(GLObal Navigation Satellite System, GLONASS)、
中國的北斗衛星系統(BeiDou Navigation System, BDS)、歐盟的伽利略定位系統(Galileo)以及日本的 準 天 頂 衛 星 系 統 (Quasi-Zenith Satellite System,
QZSS)等衛星導航系統,而透過結合不同的衛星導 航系統,可提高定位的精確度及穩定度。GNSS 之 定位需要四顆衛星同時觀測,用以解算三軸坐標分 量與接收儀的時錶誤差。GNSS 觀測量的誤差,主 要有大氣延遲誤差、衛星與接收儀的時錶誤差、衛 星軌道誤差及多路徑效應干擾(楊名,2007)。
2.3 即 時 動 態 定 位 技 術 (Real- time kinematic, RTK)
RTK 技術是利用基準站和待測站之間觀測誤 差的空間相似性,通過差分的方式消去大部分的觀 測誤差,並將載波相位與電碼觀測量和基準站信息 通過無線電傳輸設備即時地發送給待測站,待測站 接收機在接收 GNSS 衛星信號時,通過無線通訊接 收來自基準站的數據,並在系統內對採集和接收的 兩組數據進行載波相位差分處理,進行未定值求解 後,即時估算出待測站高精度的坐標,從而實現高 精度即時定位,其理論介紹如下。
2.4 GNSS 相對定位理論基礎
2.4.1 GNSS 電碼及相位觀測方程式
GNSS 電碼及相位觀測方程式,其公式可表為:
, = + ∙ ∆ − ∆ + − , ... (1)
, = + ∙ ∆ − ∆ + ∙ − ∙ , + , .... (2)
, 為電碼觀測量(m); , 為相位觀測量 (cycle);其中下標 代表接收器;上標 , 代表衛星,
代表 GNSS 系統, 為 時為 GPS、 為 時為 GLONASS、 為 時為 BDS、 為 時為 Galileo、
為 時為 QZSS; 為接收器到衛星的距離; 為光 速;∆ 為衛星時鐘偏差;∆ 為接收器時鐘偏差;
, 為衛星硬體遲延; , , , 為接收器硬體遲 延; 為訊號頻率,下標 可為 1、 2、 3、 1、
2、 3、 1、 2,其電碼與相位觀測量之對應頻率 可見表 1; , 為週波未定值。
表 1 BDS、Galileo、QZSS 及 GPS 頻率對照
衛星系統 頻段 頻率
(MHz)
波長 (cm) BDS B1 1561.098 19.20 BDS/Galileo B2/E5b 1207.140 24.83 BDS B3 1268.520 23.63 QZSS,
GPS/Galileo L1/E1 1575.420 19.03 QZSS, GPS L2 1227.600 24.42
QZSS, GPS/Galileo/
BDS
L5/E5a/
B2a 1176.450 25.48 Glonass R1 1602.0 +
K*562.5 Glonass R2 1246.0 + K*437.5 (K 為衛星編號)
由於硬體遲延量與接收器時鐘偏差係數相同,
無法同時求解,傳統上使用單一的 GPS 進行定位時,
會將接收器時鐘偏差與硬體遲延量合併為一項。但 若採用一次差分模式並將 ISB 率定,可增加求解時 之自由度(Odolinski et al., 2015)。為解決硬體遲延量 與接收器時鐘偏差係數相同的問題,因此常利用一 顆 GPS 的衛星為主衛星,將其 頻率硬體遲延量與 接收器時鐘偏差合併為一新的變數,此時一次差分 可表為:
, = − ∙ ̃ + , ... (3)
, = − ∙ ̃ + , + , ... (4)
,
∗ = ∗ − ∙ ̃ + , + ∗ , ... (5)
,
∗ = ∗ − ∙ ̃ + ∙ , + ∙ ∗, + ∗ ...(6)
其中:(∙) = (∙) − (∙) 代表接收器間的差分,
∗代表除了 GPS 外之 GNSS 系統,包括 、 、 或
。
̃ = + , , , 為接收器 與 間 GPS 衛星 電碼觀測量硬體遲延之一次差分。
, = , − , ,當 為 時此項為零。
, = , − , + , ,其中 ,
為一號 GPS 衛星 頻率之週波未定值。
,
∗ = ∗ , − , ,此項為電碼 ISB 一次
差分項。
,
∗ = , + , ∗,此項為相位 ISB 一 次差分項。
, = , − , ,GPS 衛星二次差分週 波未定值。
,
∗ ∗ = ∗, − ∗, , BDS 、 Galileo 、 GLONASS 或 QZSS 二次差分週波未定值。
2.4.2 ISBs 浮點解
將 , 與 ∗, 合併為一項 ∗ , ,其公式可表 為:
∗ , = ∗, + , = ∗ , − , ... (7)
∗ , = ∗, + , = ∗ , − , + ∗, .... (8)
合併考慮後的硬體遲延量均包含 GPS L1 的電 碼硬體遲延,傳統上時鐘偏差與硬體遲延合併估計 的方式會將電碼遲延與合併為一項。
2.4.3 ISBs 固定解
ISB 在許多的應用場合中都是可以被事先率定 的,式(7)中電碼 ISB ∗, 與相位 ISB ∗, 可 利用事先率定的方式求得,估計項會 ISB 率定值時 會引入整數未定值 , ,但此項估計可與式(6)中
,
∗ ∗ 合併為一新的整數未定值,式(5)與式(6)可改 為已率定之 ISB 以 ∗, 與 ∗, 表示。相關公式如 下(Odijk & Teunissen, 2013):
̅ ,
∗ = ∗ , − , + ∙ ,
= ∗, + ∙ , ∗ − , ∗ − , .. (9)
若不使用事先率定的方式,亦可對每個不同頻 率的星系,選用不同的參考衛星來克服此問題。
2.4.4 未定值求解
GNSS 載波相位觀測量具有公釐等級的精度,
但其中的未定值參數必須加以估計。這個估計未定 值的程序稱為未定值求解。另外,因未定值本身為
整數,故此程序被稱為整數未定值求解 (Integer Ambiguity Resolution, IAR) 。 Least-squares AMBiguity Decorrelation Adjustment(LAMBDA) 理 論為最常用的 IAR 理論,本研究亦採用此理論進行 未定值求解(Teunissen, 1995),並以對比值測試進行 解答驗證(Teunissen & Verhagen, 2004、Teunissen &
Verhagen, 2009)。
3. 系統介紹
DSRC 技術可達成各車輛間之資訊的即時相互 傳輸,而本文於 Andriod 系統上自行開發之 RTK 技 術可得到即時高精度定位成果,因此本研究結合此 二技術。本研究使用低成本單頻 GNSS 接收器因此 僅適用於短基線(< 6 km),實際應用時使用虛擬主 站技術以路側設備(road side unit, RSU)的位置產生 一個基線非常短的主站,或於路側站架設主站,再 透過 RSU 可以取得(虛擬)主站的資料,並利用 DSRC 技術將基準站資料即時傳送至車輛上,降低 因通訊造成的延遲,以應用於車對車防碰撞警示系 統,使駕駛者有足夠的反應時間進行規避,避免交 通事故發生。
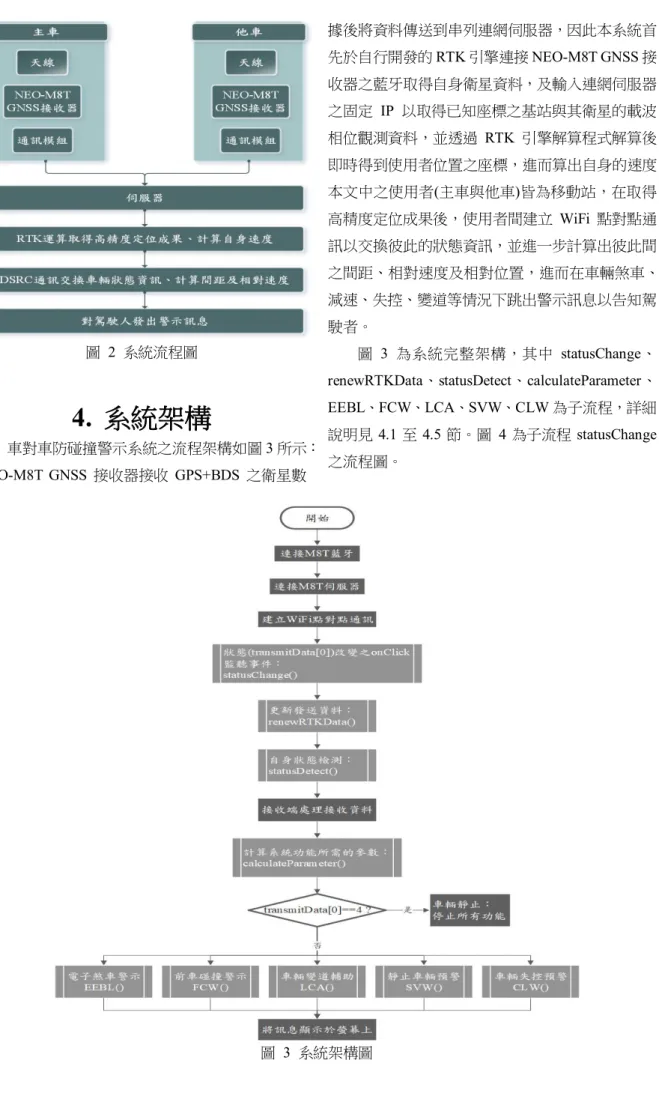
本研究之所有程式碼均為自行開發,可分為 RTK 計算及 DSRC 通訊兩個部分,如圖 2 所示。第 一部分採用 u-blox 公司的 NEO-M8T GNSS 接收器,
可接收來自 GPS、BDS、Galileo 及 QZSS 四星系之 觀測資料,加上本研究開發的 RTK 精密定位軟體 進行導航解算(張庭容,2018、Lin, 2015),則可達到 即時公分級的定位精度,進而取得即時之高精度定 位成果,並透過運算得到車輛本身之速度、加速度 等數據。第二部分則藉由 DSRC 技術即時與通訊範 圍內之其他車輛進行資訊交流,求得相對速度、相 對加速度,及煞車、方向燈等訊號,進而在車輛煞 車、減速、失控、變道等情況下對駕駛者進行警示,
使駕駛者能得知視線範圍外的所有資訊,進而將事 故發生率降至最低。
圖 2 系統流程圖
4. 系統架構
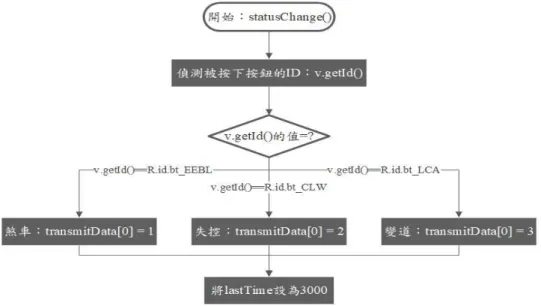
車對車防碰撞警示系統之流程架構如圖 3 所示:
NEO-M8T GNSS 接收器接收 GPS+BDS 之衛星數
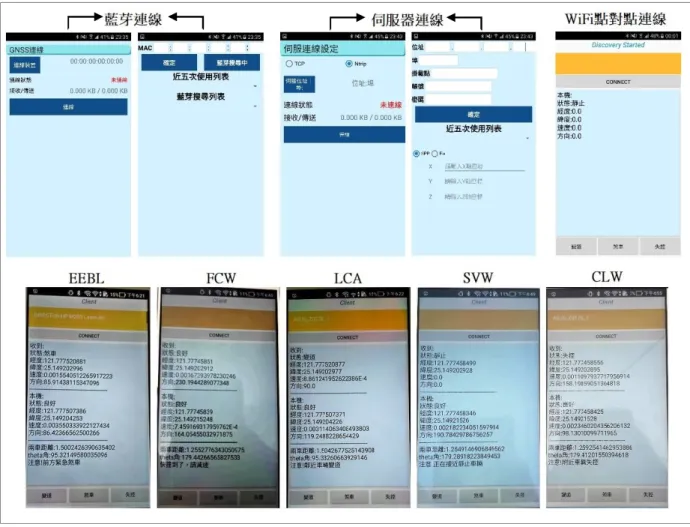
據後將資料傳送到串列連網伺服器,因此本系統首 先於自行開發的 RTK 引擎連接 NEO-M8T GNSS 接 收器之藍牙取得自身衛星資料,及輸入連網伺服器 之固定 IP 以取得已知座標之基站與其衛星的載波 相位觀測資料,並透過 RTK 引擎解算程式解算後 即時得到使用者位置之座標,進而算出自身的速度。
本文中之使用者(主車與他車)皆為移動站,在取得 高精度定位成果後,使用者間建立 WiFi 點對點通 訊以交換彼此的狀態資訊,並進一步計算出彼此間 之間距、相對速度及相對位置,進而在車輛煞車、
減速、失控、變道等情況下跳出警示訊息以告知駕 駛者。
圖 3 為系統完整架構,其中 statusChange、
renewRTKData、statusDetect、calculateParameter、
EEBL、FCW、LCA、SVW、CLW 為子流程,詳細 說明見 4.1 至 4.5 節。圖 4 為子流程 statusChange 之流程圖。
圖 3 系統架構圖
圖 4 statusChange 之流程圖
4.1 子流程 renewRTKData:更 新發送資料
更新自身位置,將持續收到之衛星資料進行 RTK 運算,得出高精度定位成果,並使用前一筆之 資料計算出自身速度與方向,如圖 5 所示。
圖 5 renewRTKData 之流程圖
4.2 子流程 statusDetect:自身 狀態檢測
子流程 statusDetect 之流程如圖 6 所示。
(1)是否連上 Tcp 伺服器(RTK 引擎),若無則判斷 無定位資料,輸出狀態為-1(無資料),若有則繼 續下一步判斷。
(2)透過狀態持續時間(lastTime)判斷是否有手動 改變狀態,若有則暫時改變為此狀態,並繼續 下一步判斷。
(3)最後判斷車輛速度是否為零(是否正在行進),
若有則輸出狀態為 4(靜止),若無則輸出當前狀 態,且若狀態未被手動改變,則輸出狀態為 0(良好)。
圖 6 statusDetect 之流程圖
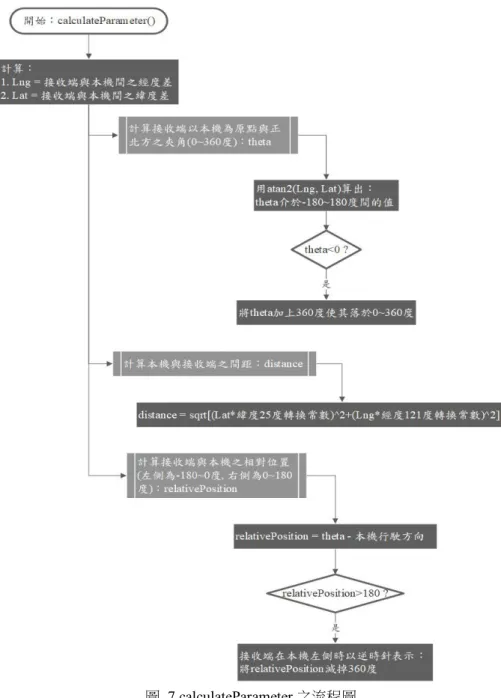
4.3 子流程 calculateParameter:計算系統功能所需的參數
子流程 calculateParameter 中的參數說明,如表 2 所示,其流程圖如圖 7 所示。
表 2 子流程 calculateParameter 中的參數說明 角度參數
θ角:接收端以本機為原點與正北方之夾角 φ角:本機行進方向
relativePosition:接收端與本機之相對位置
接收端在本機右側 接收端在本機左側
速度參數
:接收端速度之投影量 :本機速度之投影量
− :本機與接收端之相對速度
圖 7 calculateParameter 之流程圖
4.4 子流程 EEBL、FCW、LCA、
SVW、CLW:系統功能
本 系 統 包 含 電 子 煞 車 警 示 (Electronic Emergency Brake Light, EEBL) 、 前 車 碰 撞 警 示 (Forward Collision Warning, FCW)、車輛變道輔助 (Lane Change Assist, LCA)、靜止車輛預警(Stationary Vehicle Warning, SVW) 及 車 輛 失 控 預 警 (Control Losing Warning, CLW)五種功能,如圖 8 至圖 12 所 示。關於此五種功能之介紹及實作方法如下:
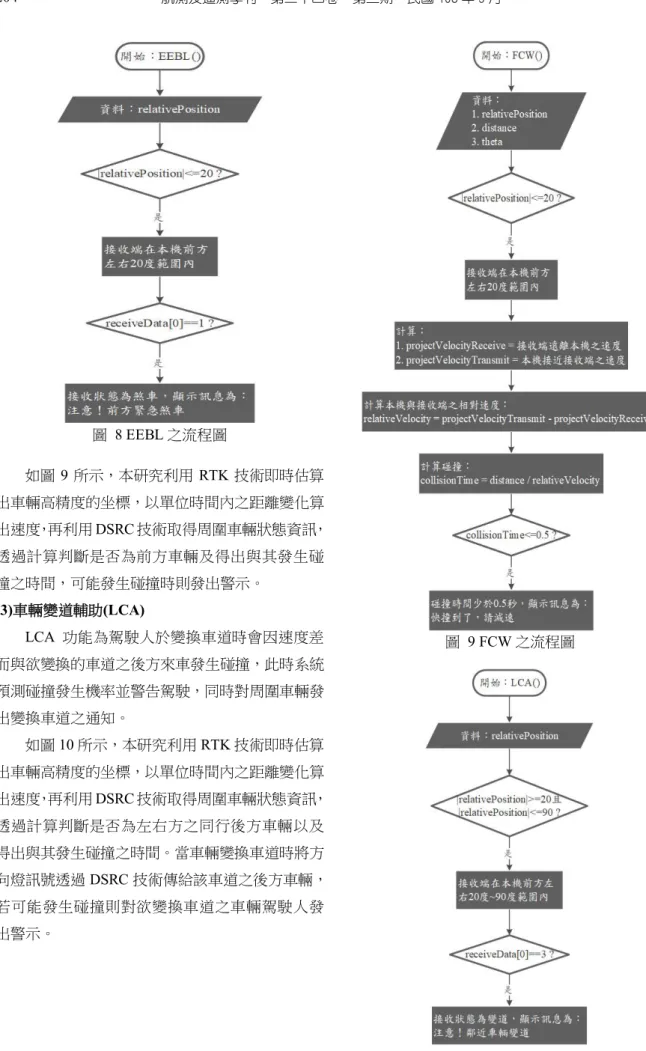
(1)電子煞車警示 (EEBL)
EEBL 功能為當前方車輛緊急煞車時則將其自
身的電子煞車資訊廣播給後方的車輛,以提醒後方 車輛駕駛人留意,避免發生連環車禍。
如圖 8 所示,本研究利用 RTK 技術即時估算 出車輛高精度的坐標,以單位時間內之距離變化算 出速度,再利用 DSRC 技術取得周圍車輛狀態資訊,
透過計算判斷出後方車輛。當車輛緊急煞車時將煞 車訊號透過 DSRC 技術傳給後方車輛,以警示後方 車輛駕駛人。
(2)前車碰撞警示 (FCW)
FCW 功能為當後方車行駛方向與前方車同向,
且前方車前進變慢而可能導致碰撞時,則警告後方 駕駛於直行道路上避免與前方車輛碰撞。
圖 8 EEBL 之流程圖
如圖 9 所示,本研究利用 RTK 技術即時估算 出車輛高精度的坐標,以單位時間內之距離變化算 出速度,再利用 DSRC 技術取得周圍車輛狀態資訊,
透過計算判斷是否為前方車輛及得出與其發生碰 撞之時間,可能發生碰撞時則發出警示。
(3)車輛變道輔助(LCA)
LCA 功能為駕駛人於變換車道時會因速度差 而與欲變換的車道之後方來車發生碰撞,此時系統 預測碰撞發生機率並警告駕駛,同時對周圍車輛發 出變換車道之通知。
如圖 10 所示,本研究利用 RTK 技術即時估算 出車輛高精度的坐標,以單位時間內之距離變化算 出速度,再利用 DSRC 技術取得周圍車輛狀態資訊,
透過計算判斷是否為左右方之同行後方車輛以及 得出與其發生碰撞之時間。當車輛變換車道時將方 向燈訊號透過 DSRC 技術傳給該車道之後方車輛,
若可能發生碰撞則對欲變換車道之車輛駕駛人發 出警示。
圖 9 FCW 之流程圖
圖 10 LCA 之流程圖
(4)靜止車輛預警(SVW)
SVW 功能為當車輛行駛途中發生碰撞或故障 等因素而被迫停滯於車道上時,系統能廣播至附近 正在靠近之車輛,使駕駛能夠即時規避。
如圖 11 所示,本研究利用 RTK 技術即時估算 出車輛高精度的坐標,以單位時間內之距離變化算 出速度,若車輛速度為零則系統判斷其為靜止,此 時若其他車輛與此車輛單位時間內之距離差變小,
則判斷為靠近之車輛,並對其發出警示。
圖 11 SVW 之流程圖 (5)車輛失控預警(CLW)
CLW 功能為當車輛有功能故障的情況而在儀 表板上出現警示時,系統會廣播給通訊範圍內車輛 之駕駛人,以警示「附近有車輛失控」。
如圖 12 所示,本研究實現方法為當車輛失控 時,利用 DSRC 將失控訊號傳給通訊範圍內之車輛,
以警示駕駛人。
圖 12 CLW 之流程圖
5. 實驗流程及成果
5.1 實驗說明
如圖 13 及圖 14 所示,DSRC 架構與 4G 網路 架構類似,由路側設備(road side unit, RSU)與車機 (on board unit, OBU)組成,前者類似於 4G 網路架構 中的基地台,後者可視為 4G 網路架構中的 4G 設 備。操作 OBU 時需透過 WiFi 連線,同樣透過 WiFi 連上 GNSS 計算單元。由於實際實驗時路邊並沒有 架設好的 RSU,因此改為利用 WiFi 連線 4G 網路 進行。
圖 13 4G 網路架構
圖 14 DSRC 架構
圖 15 為證實兩裝置皆可使用 OBU 進行 RTK 運算之實驗結果圖:分別為參考站 APP (OBU or RSU REFE)以及待測站 APP (OBU ROVE),參考站 將 raw data 傳送給待測站,待測站進行 RTK 解算 並將結果回傳至參考站。
圖 16 為使用本研究於 Andriod 系統上自行開 發之 RTK 技術,所得之即時高精度定位成果,橫軸 為資料筆數(約 12,000 連續資料),縱軸由上而下為 x(Longitude)、y(Latitude)、z(Height)。其中 x、y、z
的 std 分別約為 0.00521074427 m、0.00570336871 m、0.013353 m,std 很小即其誤差很小,表示定位 精準度達到公分等級。
圖 15 證實兩裝置皆可使用 OBU 進行 RTK 運算之實驗結果圖
圖 16 即時高精度定位成果圖
5.2 實驗過程
本研究利用手機 GPS 定位取得衛星定位資料,
實驗過程步驟如圖 17 所示。
圖 17 利用手機 GPS 定位之實驗流程 利用 GNSS 定位結合 RTK 運算取得衛星定位 資料,實驗流程步驟如圖 18 所示。
圖 18 利用 GNSS 結合 RTK 運算之實驗流程
5.3 實驗成果
圖 19 為利用手機所接收之 GPS 衛星定位資料 應用於車對車防碰撞警示系統,而圖 20 則是利用 GNSS 衛星資料經 RTK 運算後的定位資料來做應 用。比較兩圖之定位成果可知,經 RTK 運算之定位 資料有較高的精確度。圖 21 為 RTK 分布圖,其中 RTK 資料筆數為 10,000。
圖 19 利用手機 GPS 定位之實驗成果 步驟一
• 用手機GPS定位(SPP)取得自身的衛 星資料,並計算出自身移動之速度 及行駛方向。
步驟二
• 建立WiFi點對點通訊,讓使用者間 可互傳車輛狀態資訊。
(此步驟原為使用DSRC通訊來交換 車輛狀態資訊,然而由於測試期間 硬體設備廠商要使用,故以WiFi點 對點通訊替代)
步驟三
• 使用者間利用彼此的車輛狀態資訊 計算出彼此間的距離、相對速度及 相對位置。
步驟四
• 將所得之數據應用到車對車防碰撞 警示系統的五項功能:EEBL、
FCW、LCA、SVW及CLW,實驗 成果如圖19所示。
步驟一
• 用 NEO-M8T GNSS 接 收 器 接 收 GPS+BDS之衛星數據後將資料 傳送 到串列連網伺服器。
步驟二
• 系統連接NEO-M8T GNSS接收器的 藍牙及伺服器以取得衛星數據,並對 這些數據進行RTK運算得到公分級的 高精度定位資料,進而計算出自身移 動之速度及行駛方向。
步驟三
• 建立WiFi點對點通訊,讓使用者間可 互傳車輛狀態資訊。
(此步驟原為使用DSRC通訊來交換車 輛狀態資訊,然而由於測試期間硬體 設備廠商要使用,故以WiFi點對點通 訊替代)
步驟四
• 使用者間利用彼此的車輛狀態資訊計 算出彼此間的距離、相對速度及相對 位置。
步驟五
• 將所得之數據應用到車對車防碰撞警 示系統的五項功能:EEBL、FCW、
LCA、SVW及CLW,實驗成果如圖 20所示。
圖 20 利用 GNSS 定位結合 RTK 運算之實驗成果
圖 21 RTK 分布圖
6. 結論
本研究的目的在於結合 RTK 技術及 DSRC 技 術,以達到使用者間可即時互傳實時高精度定位資 料,進而應用於車對車防碰撞系統。本實驗假設兩 車皆使用手機進行定位,直接使用 SPP 定位技術雖 可直接快速得到定位,但並不能達到車聯網所需之 定位精度要求;相同條件下,只需使用本研究於 android 上自行開發之 RTK 技術,及可得到即時高 精度之定位。而由實驗成果可看出,將 GNSS 接收 之衛星資料經 RTK 運算後之定位成果可達到公分 級的高精度定位,明顯比手機 GPS 定位來得高,故 可讓車對車防碰撞警示系統更有效地在車禍發生 前,對駕駛人做出警示,以降低交通事故發生的機 率。
參考文獻
MBA 智庫百科─DSRC,http://wiki.mbalib.com/zh- tw/DSRC,引用 2019/1/17。[MBA Think Tank- DSRC, Available at: http://wiki.mbalib.com/zh- tw/DSRC, Accessed January 17, 2019. (in Chinese)]
林修國、張庭容、吳順德、陳姿吟,2017。低成本 GPS/BDS-RTK 技術應用於結構監測,第三十 六屆測量及空間資訊研討會,臺南。[Lin, S.G., Chang, T.J., Wu, S.D., and Chen, Z.Y., 2017.
Structural monitoring by low-cost GPS/BDS- RTK technology, The 36th Conference on Surveying and Geomatics, Tainan.(in Chinese)]
張庭容,2018。低成本單頻 GNSS 接收器應用於車 載即時動態定位之研究,國立臺灣海洋大學通 訊與導航工程學系碩士論文。[Chang, T.J., 2018.
A study on vehicle positioning using low-cost single-frequency GNSS RTK technology, Master
Thesis, National Taiwan Ocean University, Taiwan , ROC. (in Chinese)]
楊 名 , 2007 。 電 離 層 延 遲 效 應 與 電 磁 波 , https://goo.gl/MFZu1D,引用 2019/1/17。[Yang, M., 2007. Ionospheric delay effect and electromagnetic wave, Available at:
https://goo.gl/MFZu1D, Accessed January 17, 2019. (in Chinese)]
Lin, S.G., 2015. Assisted adaptive extended Kalman filter for low-cost single-frequency GPS/SBAS kinematic positioning, GPS Solution, 19(2):215- 223, DOI:10.1007/s10291-014-0381-9.
Odijk, D., and Teunissen, P.J.G., 2013.
Characterization of between-receiver GPS- Galileo inter-system biases and their effect on mixed ambiguity resolution, GPS Solutions, 17(4):
521-533.
Odolinski, R., Teunissen, P. J., and Odijk, D, 2015.
Combined BDS, Galileo, QZSS and GPS single- frequency RTK, GPS Solutions, 19(1): 151-163.
Teunissen, P.J.G., 1995. The least-squares ambiguity estimation decorrelation adjustment: a method for fast GPS integer ambiguity estimation, Journal of Geodesy, 70(1-2): 65-82, DOI:
10.1007/BF00863419.
Teunissen, P.J.G., and Verhagen, S., 2004. On the foundation of the popular ratio test for GNSS ambiguity resolution, Proceedings of ION GNSS 2004, Long Beach CA, 2529-2540.
Teunissen, P.J.G., and Verhagen, S., 2009. The GNSS Ratio-Test Revisited: A better way of using it, Survey Review, 41(312): 138-151.
.
1 Undergraduate Student, National Taiwan Ocean University Received Date: Jan. 17, 2019
2 Associate Professor, National Taiwan Ocean University Revised Date: Apr. 17, 2019
* Corresponding Author, E-mail: [email protected] Accepted Date: Jul. 03, 2019
Vehicle-to-Vehicle Anti-Collision Warning System Using DSRC and GNSS RTK Technology
Yi-Hsiu Lin
1Wei-Chieh Liu
1Shiou-Gwo Lin
2*Abstract
Vehicle-to-vehicle anti-collision warning can be achieved by using real-time high-precision positioning and instant communication among vehicles when there is no way to see, and the article combines the RTK technology and the DSRC technology to meet the requirements. When doing the GNSS RTK positioning, the GNSS receiver on the vehicle receives the observation data and the station information from the reference station when collecting the satellite data. Then, the instantly relative positioning is performed on the two sets of data to achieve high- precision positioning. The DSRC technology enables vehicles to directly transmit two-way messages within tens of meters, and provides high-speed data transmission to ensure real-time information transmission while the vehicle is moving at high speed. With the two technologies, the vehicle-to-vehicle anti-collision warning system makes the driver have sufficient reaction time, preventing the traffic accident.