第 二 十 卷 第 二 期 中華民國一○五年四月
ISSN 1021-8661 DOI: 10.6574/JPRS
Journal of Photogrammetrty and Remote Sensing
Volume 20 No.2 April 2016
Published by Chinese Society of Photogrammetrt and Remote Sensing
航 航 測 測 及 及 遙 遙 測 測 學 學 刊 刊
Journal of Photogrammetry and Remote Sensing
發行人:史天元
出版者:中華民國航空測量及遙感探測學會 地址:台北市文山區羅斯福路五段 113 號三樓 信箱:台北市郵政 93-158 號信箱
電話:886-2-8663-3468 886-2-8663-3469 傳真:886-2-2931-7225
電子信件:[email protected] 網址:http://www.csprs.org.tw
PUBLISHER:Peter Tian-Yuan Shih
PUBLISHED BY: Chinese Society of Photogrammetry and Remote Sensing
Address: 3F, No.113, Sec.5, Roosevelt Road, Taipei, Taiwan Mail Address: P. O. Box. 93-158, Taipei, Taiwan
Tel: 886-2-8663-3468 886-2-8663-3469 Fax: 886-2-2931-7225
E-mail:[email protected] Web Site:http://www.csprs.org.tw 總編輯
曾義星
國立成功大學測量及空間資訊學系 電 話:886-6-275-7575 分機 63835 傳 真:886-6-237-5764
電子信件:[email protected]
EDITOR-IN-CHIEF Yi-Hsing Tseng
Department of Geomatics, National Cheng Kung University Tel: 886-6-275-7575 ext. 63835
Fax: 886-6-237-5764
E-Mail: [email protected] 編輯委員(依中文姓氏筆劃排列) EDITORIAL BOARD
王素芬 (彰化師大) 王聖鐸 (師範大學)
江凱偉 (成功大學)
S. F. Wang (National Changhua University of Education) S. Wang (National Taiwan Normal University)
K. W. Chiang (National Cheng Kung University)
何宗儒 (海洋大學) C. R. Ho (National Taiwan Ocean University)
林昭宏 (成功大學) C. H. Lin (National Cheng Kung University)
邱式鴻 (政治大學) S. H. Chio (National Chengchi University)
林老生 (政治大學) L. S. Lin (National Chengchi University)
林唐煌 (中央大學) T. H. Lin (National Central University)
周天穎 (逢甲大學) T. Y. Chou (Feng Chia University)
洪榮宏 (成功大學) J. H. Hong (National Cheng Kung University)
徐百輝 (臺灣大學) 陳朝圳 (屏東科大)
P. H. Hsu (National Taiwan University)
C. T. Chen (National Pingtung University of Science and Technology)
張中白 (中央大學) C. P. Chang (National Central University)
黃金聰 (臺北大學) J. T. Hwang (National Taipei University)
曾義星 (成功大學) Y. H. Tseng (National Cheng Kung University)
詹進發 (政治大學) J. F. Jan (National Chengchi University)
楊明德 (中興大學) M. D. Yang (National Chung Hsing University)
蔡富安 (中央大學) F. Tsai (National Central University)
蔡榮得 (中興大學) J. D. Tsai (National Chung Hsing University)
封面照片說明 About the Cover
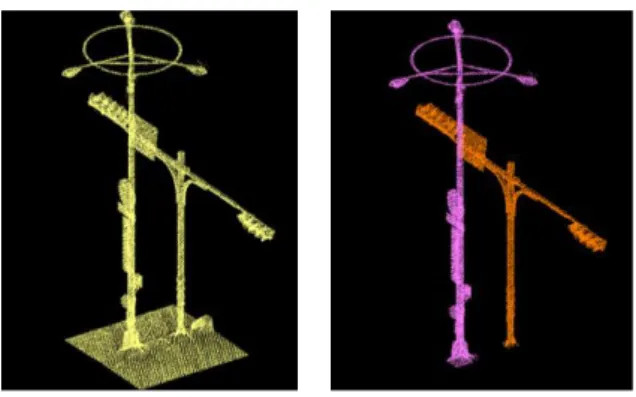
三維道路模型為數位城市重要的三維空間資訊之一,其中類桿狀道路物件為高細緻度三維道路模型 必要的三維道路元件。車載光達系統可快速掃描獲取道路設施的三維幾何外觀,可滿足類桿狀道路物件 偵測及重建之需求,經由多尺度點雲分割、物件特徵萃取、及類桿狀物件識別可偵測類桿狀道路物件,
再利用元件庫對應之三維類桿狀道路模型,經由調整元件庫模型參數完成都市區類桿狀道路物件重建。
上圖為道路街景影像,下圖為模型重建成果。
航測及遙測學刊 第二十卷 第 2 期 第 75-92 頁 民國 105 年 04 月 75 Journal of Photogrammetry and Remote Sensing
Volume 20, No.2, 2016, pp. 75-92 DOI:10.6574/JPRS.2016.20(2).1
1國立成功大學測量及空間資訊學系 碩士 收到日期:民國 98 年 03 月 21 日
2國立成功大學測量及空間資訊學系 副教授 修改日期:民國 104 年 10 月 20 日
*通訊作者, Email: [email protected] 接受日期:民國 105 年 01 月 18 日
GSM 法-從空載光達點雲萃取道路交通標線交點
李宏君
1蔡展榮
2*摘 要
本文根據瀝青路面及道路交通標線之光達回波強度的差異性,設計高斯曲面匹配(Gaussian Surface Matching, GSM)法,以求定直線型交通標線之線特徵參數,進而求得垂直交會的兩條直線標線之交點,並 由不同航帶的光達點雲同名交點來估計與改正相鄰航帶點雲坐標基準偏差量,俾使用標線交點群來求解 空照影像的外方位元素,使兩者建立在共同的坐標系統之中,以利後續空載光達與航空攝影測量的整合 應用。經由實際資料測試,光達航帶點雲坐標基準經改正後,同名交點之整體平面偏差量之均方根值從 0.650m 降至 0.286m,符合光達點之先驗平面精度±0.25m。使用這些基準改正後的點位做為地控點(共 30 點),施行空照影像光束法平差,整體空三精度達到±0.67 個像元的次像元精度等級。
關鍵詞:高斯曲面匹配法、空載光達、空照數位影像、反射強度
1. 前言
空 載 光 達 (Airborne Light Detection And Ranging, Airborne LiDAR)測量利用雷射快速且精 確的測距功能,可從高空中直接對地表進行掃描以 獲取三維點雲(point cloud),其優勢在於有能力快 速提供大範圍、高密度且直接的三維點位觀測資料,
較不受天候、時間的影響,大幅提高量測效率與自 動化程度,在大範圍數值表面模型(Digital Surface Model, DSM)重建的應用上更是日益廣泛。愈來愈 多學者專家對此新興測量技術和攝影測量特性之 間的異同感興趣,例如:Baltsavias (1999)廣泛比較 了兩者的工作原理、資料獲取方式、資料處理、誤 差特性、自動化程度等特性;Schenk and Csatho (2002) 則 對 兩 者 在 實 際 被 測 物 表 面 重 建 (surface reconstruction)工作上的應用做了更深入的比較,發 現兩種測量技術具有相當高程度的互補性,故進而 提出融合(fusion)這兩種感測資料的策略,使彼此 之間能達到截長補短的效果,以求應用於物表重建 工作時可達到更穩健和全面的解算成果;Mitishita et al. (2008)亦說明結合這兩種互補技術在三維建
模的優點。換言之,隨著科技的進步,當獲取大量 量測資料的能力已不再是個大難題時,可預期地,
諸 如 前 述 構 想 所 衍 生 出 的 多 感 測 器 整 合 (Multi-sensor Integration)測量技術之研究價值將逐 漸地備受重視。
為了達到空載光達與航空攝影測量整合的目 的,首要工作必須統一這兩個量測資料的坐標基準。
本文運用光達回波強度在道路交通標線與瀝青路 面上呈現高反差對比的特性,設計高斯曲面匹配 (Gaussian Surface Matching, GSM)法來求解直線標 線參數,進而求得垂直交會的兩條直線型交通標線 交點(如圖 1 所示的黃點)之坐標,當成求解空照影 像外方位的地面控制點,如此一來,光束法平差求 解出的影像外方位元素就與光達點雲的坐標基準 具有高一致性。相對於其它特徵,垂直交會的兩條 直線型交通標線之交點在使用上之優勢或便利性 為 1.交通標線和其周圍的瀝青路面有迥然不同的 光達回波強度,有利於簡單的高斯曲面函數來自動 量測(推估)直線標線帶區的中心直線位置、2. 垂直 交會的兩條直線型交通標線可以求得較可靠的交 點位置、3.數量夠多且均勻分布於標線區的光達點
76 航測及遙測學刊 第二十卷 第二期 民國 105 年 04 月 可供求定可靠的中心直線之位置。
本文第 2 節引用光達方程式的理論公式來分 析瀝青路面與交通標線上的光達回波強度呈現高 低迥異的原因;第 3 節說明高斯曲面匹配 GSM 法 的函數和隨機模式、未知數起始近似值之計算、資 料處理流程,並設計一套整合光達點雲與空照影像 之實驗流程;第 4 節闡述實驗成果與分析,第 5 節整理出本文的研究結論與建議。
圖 1 GSM 法求解直線標線參數,進而求得垂直交 會的兩條直線型交通標線的交點
2. 光達回波強度特性
2.1 光達方程式
當光達對物表進行掃描時,每個從發射器 (transmitter) 發 射 出 的 雷 射 脈 衝 訊 號 與 地 表 目 標 (target)接觸後會產生反向散射(backscattering),部 分的能量會回傳至接收器(receiver),接收器記錄雷 射脈衝行進的時間(time-of-flight)以及回傳訊號的 振幅(amplitude)或能量(energy)大小,因此,光達測 量不僅記錄著物表的三維點位坐標,也記錄光達回 波強度,它反應了雷射光在物表上的反射和散射性 質。一般認為回波強度與接收器接收的雷射回波訊 號之功率有相當大的關係(Jelalian, 1992; Wagner et al., 2006; Höfle and Pfeifer, 2007; Kaasalainen et al., 2007)。
假 設 目 標 之 表 面 為 一 個 理 想 的 朗 伯 表 面 (Lambertian surface),當雷射光從任意角度照射目 標 表 面 後 , 均 在 各 個 方 向 上 產 生 相 同 的 亮 度 (luminance),亦即亮度與方向無關,而雷射訊號從
「發射」、「散射」到「接收」三階段之間的相關參 數及其關係可簡單表示如圖 2,它顯示了雷射接收 功率的強弱與「發射器」、「目標」、「大氣」與「接 收器」四種介質的特性有關,(1)式就是所謂的光 達方程式(LiDAR equation),它描述相關的影響因 子與光達回波強度之間的關係(修改自 Wagner et al.(2006))。
2
2 cos
4
t r
r atm
P PD R
(1)
其中 Pr為雷射訊號接收功率;Pt為發射功率;Dr 為接收器的孔徑;ρ 為物表反射率;Ω 為反射圓錐 角(圖 2b);R 為雷射發射器至物表的距離;α 為雷 射入射角;ηatm為大氣條件對雷射光傳遞的影響因
子,ηatm =10-2R t/10000,其中 t 代表衰減係數(單位:
dB/km),會隨著不同的氣象條件而變化,例如空氣 混濁度。當空氣愈混濁時,t 值愈大。
由光達方程式可知,影響接收功率(Pr)的主要 參數共有 7 個:距離(R)、反射圓錐角(Ω)、物表反 射率(ρ)、雷射輸出功率(Pt)、接收器孔徑(Dr)、入 射角(α)與大氣影響因子(ηatm),正負相關性如表 1 所示。在「小範圍的平坦瀝青路面」內,觀測量的 大氣條件、距離、入射角度與儀器參數(包含雷射 發射功率、接收器之孔徑大小)皆可視為相同,故 造成回波強度差異的原因僅有與目標有關之「物表 反射率」與「反射圓錐角」。物表反射率與物表之 物理或化學性質有關,例如:物表顏色、材質、密 度、含水量等;反射圓錐角則與粗糙度有關,這兩 個因素是造成瀝青路面與標線表面之光達回波強 度差異的主要原因。
除了前述的光達回波強度值外,光達系統也 結 合 雷 射 測 距 和 定 位 定 向 系 統 (Positioning and Orientation System, POS)就可以直接一併求得被測 點 的 三 維 坐 標 , 藉 以 實 踐 直 接 地 理 定 位 (direct
李宏君、蔡展榮:GSM 法-從空載光達點雲萃取道路交通標線交點 77
georeferencing)的測量作業,用來計算被測點的三 維坐標之理論公式可參閱相關文獻,本文不再贅
敘。
(a)
(b)
圖 2 光達方程式之相關參數與幾何關係(Wagner et al., 2006)
表 1 影響回波強度的因素(+為正相關;-為負相關) a.
b.
a.
b.
影響原因 相關性
距離長短 -
物表反射率大小 +
表面粗糙度 -
雷射發射功率 +
入射角之餘弦值大小 +
接收器之孔徑大小 +
大氣影響 -
78 航測及遙測學刊 第二十卷 第二期 民國 105 年 04 月
2.2 道路交通標線區之回波強度
檢視空載光達在不同路段的實測點雲資料,
例如表 4、表 5 與圖 14、圖 15 所示的 8 個標線區 數據均驗證了上節所述的光達在交通標線及標線 外的瀝青路面兩區分別具有高、低的回波強度 I,
其它的實測光達回波強度驗證數據請參閱(李宏君,
2008)。本文據此設計了一個合適的高斯數學面來 表達路面區的光達回波強度之空間分佈函數 I(X,Y),
進行(X,Y,I)點雲和高斯面函數 I(X,Y)的最小二乘擬 合來求定道路交通標線參數,進而求得垂直交會的 兩條直線型交通標線交點的坐標。
假設落於道路交通標線和瀝青路面的光達點 之 footprint 是一個半徑為 R 的圓形區,如圖 3 所 示,圖 3a 之灰色區域代表瀝青路面,白色區域代 表交通標線,當 footprint 之位置從標線外之瀝青路 面區逐漸移到標線內時,回波強度會隨著 footprint 落在標線區的面積增加而增強,如圖 3b 所示,當 u=0 時,footprint 的中心位置正好位於高強度 I=A
和低強度 I=a 之交界處,此時也是反射強度變化率 從遞增到遞減的轉折點,亦是位於高斯鐘形曲線一 個標準差σ 的位置。類似於嚴晟瑋及蔡展榮(2003) 的航測標影像,訊號摺積(convolution)在邊線產生 近似高斯函數的(航測標線影像或交通標線光達回 波強度)變化曲線(或曲面),例如圖 14、圖 15 驗證 了標線的真實光達回波強度函數 I(X,Y)的趨勢面均 呈現圖 4 所示的高斯鐘形曲面。
根據前述分析,本文設計(2)式來表達標線區的 光達回波強度函數 I(X,Y),它是一個在 X 方向無限 延伸的數學面函數,四個附加參數包括標線寬度 D、
邊緣模糊程度 n、函數最大值 A、最小值 a。圖 4 顯示一個面函數例,四參數值各為 D=1、n=1、A=4、
a=1,當 n 值愈大時,從 A 到 a 的曲面愈陡峭,即 模糊程度愈低。
2 2
, ,
n D Y
I X Y a A a e n N
(2)
a 位於交通標線處之 footprint b 交通標線處之回波強度連續變化曲線 圖 3 交通標線處之回波強度值的變化示意圖(修改自 Vosselman, 2002)
a 三維曲面 I(X,Y) b 二維剖線 I(Y) 圖 4 高斯曲面函數(a)及其剖線(b)
Y X
I A=4 D=1
a=1
n=1
李宏君、蔡展榮:GSM 法-從空載光達點雲萃取道路交通標線交點 79
3. 平差模式與實驗設計
3.1 實際資料統計特性分析
如上節所述,小範圍平坦道路鋪面常包括熱 拌樹脂交通標線、和瀝青路面兩種材質,兩者的反 射率與粗糙度明顯不同。此節探討同一個空載光達 系統在各個局部的平坦道路標線小區(全部光達點 入射角近似相等)量測的光達回波強度值的觀測誤 差之統計特性,本文分別從瀝青路面與交通標線的 實際範圍,根據不同樣本區塊大小、不同材質、材 質新舊程度三個原則,從原始光達點雲挑選理想的 均質樣本區,繪出光達點雲回波強度 I 值分布直方 圖,藉此觀察其統計散布並計算其統計量(平均值、
標準偏差、最大值、最小值),對回波強度進行統 計特性之分析,藉此檢驗其回波強度值之觀測誤差 是否符合高斯常態分布,比較小範圍平坦道路鋪面 的熱拌樹脂交通標線、和瀝青路面兩種材質的回波 強度之差異性(difference)及同材質的回波強度之 變異性(variation)。
由於本文使用 的光達點 雲 之平均點密度 為 6pts/m2,對於寬度僅 20cm~40cm 的交通標線的取 樣不易,故增加另一個均質樣本區「鐵皮屋頂」之 抽樣分析。綜合所有的抽樣和圖 5~圖 7 的三組具 代表性的抽樣實例的比較,可對實際光達點雲回波 強度之統計特性做下列之歸納:
1.
如圖 5~圖 7 所示,在小範圍的平坦均質鋪面上,光達點雲的回波強度值之觀測誤差可視為常態 分佈。不管是在瀝青路面或是鐵皮屋頂面,回波 強度的「平均值」和「標準偏差」並不會隨著樣 本區的增大(縮小)而有顯著的改變,驗證小區的 平坦均質鋪面上的光達回波強度之偶然誤差可 視為常態分布。
2.
就本文使用的真實光達資料而言,回波強度 I 值 越大,則 I 值的觀測精度越差。比較圖 5 與圖 6 所對應之相同大小樣本區內的回波強度值之標 準偏差可得知。3.
如圖 6 所示,本批光達點雲在高反射率的鐵皮屋 頂面上所記錄的回波強度值呈現離散(非連續) 分布,且其離散間隔固定為 20,而其整體散布 趨勢仍呈現常態分布。由此現象可推測此部儀器 在進行該次光達測量任務時,接收訊號(Pr)轉換 為強度值 I 的過程中,應有離散量化的特定簡化 處理。4. 以此部光達儀器之回波強度值量測而言,新鋪 瀝青路面之精度比舊瀝青路面之精度佳。比較圖 7 a、b 所示之統計表得知。另外,由於瀝青路面 之原色較深,當其受污成為舊路面時,其表面顏 色往往會比原色更淺,故由圖 7 亦可發現其區塊 內之回波強度平均值比新鋪瀝青路面要來的 高。
平 均 值 54.0 中 值 54
標準偏差 3.8
變 方 14.4 最 小 值 43 最 大 值 75 點 數(pts) 850 點密度(pts/m2) 13.3 a. 8×8 m2樣本區
80 航測及遙測學刊 第二十卷 第二期 民國 105 年 04 月
平 均 值 54.0 中 值 54
標準偏差 3.8
變 方 14.4 最 小 值 44 最 大 值 75 點 數(pts) 500 點密度(pts/m2) 13.9 b. 6×6 m2樣本區
平 均 值 54.6 中 值 54
標準偏差 3.8
變 方 14.4 最 小 值 44 最 大 值 68 點 數(pts) 223 點密度(pts/m2) 13.9 c. 4×4 m2樣本區
圖 5 瀝青路面樣本區之回波強度直方圖及統計量(橫軸:回波強度值;縱軸:點數)
平 均 值 286.6 中 值 280 標準偏差 19.2 變 方 368.6 最 小 值 240 最 大 值 340 點 數(pts) 409 點密度(pts/m2) 6.4 a. 8×8 m2樣本區
平 均 值 286.2 中 值 280 標準偏差 19.6 變 方 384.16 最 小 值 240 最 大 值 340 點 數(pts) 238 點密度(pts/m2) 6.6 b. 6×6 m2樣本區
平 均 值 284.3 中 值 280 標準偏差 19.1 變 方 364.8 最 小 值 240 最 大 值 320 點 數(pts) 106 點密度(pts/m2) 6.6
c. 4×4 m2樣本區
圖 6 鐵皮屋頂面樣本區之回波強度直方圖及統計量(橫軸:回波強度值;縱軸:點數)
220 240 260 280 300 320 340 360
0 20 40 60 80 100 120 140 160
反 射 強 度 值
個數
全 區 反 射 強 度 值 分 佈 圖
240 250 260 270 280 290 300 310 320 330 340 0.001
0.003 0.01 0.02 0.05 0.10 0.25 0.50 0.75 0.90 0.95 0.98 0.99 0.997 0.999
Data
Probability
Normal Probability Plot
220 240 260 280 300 320 340 360
0 20 40 60 80 100
反 射 強 度 值
個數
全 區 反 射 強 度 值 分 佈 圖
240 250 260 270 280 290 300 310 320 330 340 0.003
0.01 0.02 0.05 0.10 0.25 0.50 0.75 0.90 0.95 0.98 0.99 0.997
Data
Probability
Normal Probability Plot
230 240 250 260 270 280 290 300 310 320 330 0
5 10 15 20 25 30 35 40
反 射 強 度 值
個數
全 區 反 射 強 度 值 分 佈 圖
240 250 260 270 280 290 300 310 320
0.003 0.01 0.02 0.05 0.10 0.25 0.50 0.75 0.90 0.95 0.98 0.99 0.997
Data
Probability
Normal Probability Plot
李宏君、蔡展榮:GSM 法-從空載光達點雲萃取道路交通標線交點 81
平均值 62.2
中 值 62
中誤差 4.6
變 方 21.2
最小值 50
最大值 75
點數(pts) 419 點密度(pts/m2) 6.5 a. 舊瀝青路面(8×8 m2樣本區)
平 均 值 54.0 中 值 54
標準偏差 3.8
變 方 14.4 最 小 值 43 最 大 值 75 點 數(pts) 850 點密度(pts/m2) 13.3 b. 新鋪瀝青路面(8×8 m2樣本區)
圖 7 新舊瀝青路面回波強度值之直方圖及統計量(橫軸:回波強度值;縱軸:點數)
3.2 高斯面匹配法
高斯面匹配法(GSM)的設計構想是來自於「擴 充式最小二乘影像匹配法(Extended Least Squares Image Matching, ELSIM)(嚴晟瑋及蔡展榮,2003)」, ELSIM 是提供框標和航測標之自動化量測。類似 於 ELSIM 的設計原理,GSM 是將光達點雲的回波 強度 I 值視同影像的灰階值,先定義適當的數學面 函數以表達規則的交通標線 區的回波強度函數 I(X,Y),將高斯曲面 I(X,Y)與光達(X,Y,I)點雲做最小 二乘擬合,藉此求得直線型道路交通標線的參數 解。
圖 8 說明 GSM 法進行道路標線參數求解之流 程,首先以人工來挑選標線區塊,區塊內容僅包含 單一標線及瀝青路面之小區均質區塊,經過未知數 起始近似值的計算與給定合宜的權值之後,就進行 GSM 法的最小二乘平差計算。
GSM 的函數模式是在 2.2 節所定義的 I(X,Y) 中加入兩個幾何轉換參數,包括圖 9 所示的平移參 數 Ty 和一個旋轉角參數 θ,如(3)式:
I(𝑋′, 𝑌′) =
a + (A − a) ∙ 𝑒{−[
√2
𝐷(−𝑋′∙𝑠𝑖𝑛𝜃+𝑌′∙𝑐𝑜𝑠𝜃−𝑇𝑦∙𝑐𝑜𝑠𝜃)]2𝑛}
(3)
式中的 X'-Y'是空載雷射掃描資料的坐標系統,本 文實驗用的光達點位資料是採用 TWD97 二度分帶 坐標系統。假設定義之高斯鐘形曲面函數為 I,位 於人工挑選之直線交通標線區塊內的原始光達點 雲 回 波 強 度 之 觀 測 量 為 G , 則 G(X',Y')+v(X',Y')=I(X',Y') , 其 中 v(X',Y') 是 觀 測 量 G(X',Y')的改正數,觀測方程式可表示為(4)式:
G(𝑋′, 𝑌′) + 𝑣(𝑋′, 𝑌′) =
a + (A − a) ∙ 𝑒{−[
√2
𝐷(−𝑋′∙𝑠𝑖𝑛𝜃+𝑌′∙𝑐𝑜𝑠𝜃−𝑇𝑦∙𝑐𝑜𝑠𝜃)]2𝑛}
(4)
為了簡化計算的複雜度,在此不進行 n 值的求解。
李宏君(2008)使用本文的真實空載光達數據測試 得知,n=2 定義的(3)式可以得到與光達點雲有最佳 套合的高斯曲面,因此,本文採用 n=2 來進行全部
82 航測及遙測學刊 第二十卷 第二期 民國 105 年 04 月 的實驗計算。由於此觀測方程式為非線性函數,將
(4)式線性化得如下的觀測方程式:
X , Y X , Y 0X , Y I 0 I 0 I 0
v G I d dTy dD
Ty D
0 0
I I
dA da
A a
(5)
令f (X ,Y )= (X ,Y )- (X , Y ) G I0 ,I 0(X',Y')為利用未知數 近似值(θ0, Ty0, D0, A0, a0)代入(4)式計算得到的面 函數近似值。假設匹配區塊內共有 m 個光達點(觀 測量),則(5)式之線性化觀測方程式可利用矩陣型 態表示為:Vm×1+ fm×1= Bm×5Δ5×1。另外,每個觀測 量必須給定一個合宜的權值,以反應每個觀測量 (回波強度)之精度等級。本文僅考慮將實驗區塊中 之光達點雲回波強度分為兩個精度等級,假設位於 瀝青路面上之回波強度的中誤差為 σb,位於標線 上之回波強度的中誤差為 σl,則令前者之權值為 1(=σb2/σb2),而後者之權值為(σb2/σl2)。
GSM 的 5 個未知數 θ、Ty、D、A、a 的起始 近似值可依照圖 10 的流程來自動計算並給定之。
首先利用回波強度的門檻值對區塊內的點雲分類 成瀝青路面點雲及標線點雲,對兩類點雲之回波強 度值分別取平均值後,可做為 a 與 A 之起始近似 值;接著對標線點雲進行最小二乘直線擬合,可求 得θ 與 Ty 的起始近似值;最後以該擬合直線為中 心線,往垂直直線方向的兩側同步擴張,直到包含 標線區點雲,且不包含任何非標線區點雲的最大範 圍,即為 D 之起始近似值。
依計算出的增量更新每個未知數近似值,再 進行下一次的迭代(iteration)計算,直到全部未知數 近似值的增量均滿足收斂條件為止,即可求得全部 未知數θ、Ty、D、A、a 的最或是值和它們的協變 方矩陣,進而由 Ty 與 θ 求得該交通標線的直線方 程式。
圖 8 GSM 道路標線參數解算流程圖
圖 9 GSM 法的最小二乘匹配與未知數 θ、Ty 說明 圖
圖 10 GSM 未知數起始近似值之計算流程圖 光達點雲 強度資料 G
X' Y'
模擬面函數I
Ty θ X Y
李宏君、蔡展榮:GSM 法-從空載光達點雲萃取道路交通標線交點 83
3.3 實驗設計
圖 11 說明本文的實驗設計流程,首先運用 3.2 節所述之 GSM 法,從光達點雲來求解出道路交通 標線參數,進而求得垂直交會的兩條直線型交通標 線交點坐標,做為從光達點雲中所萃取出的特徵點 位和空三的地控點。由於光達航帶寬度遠小於空照
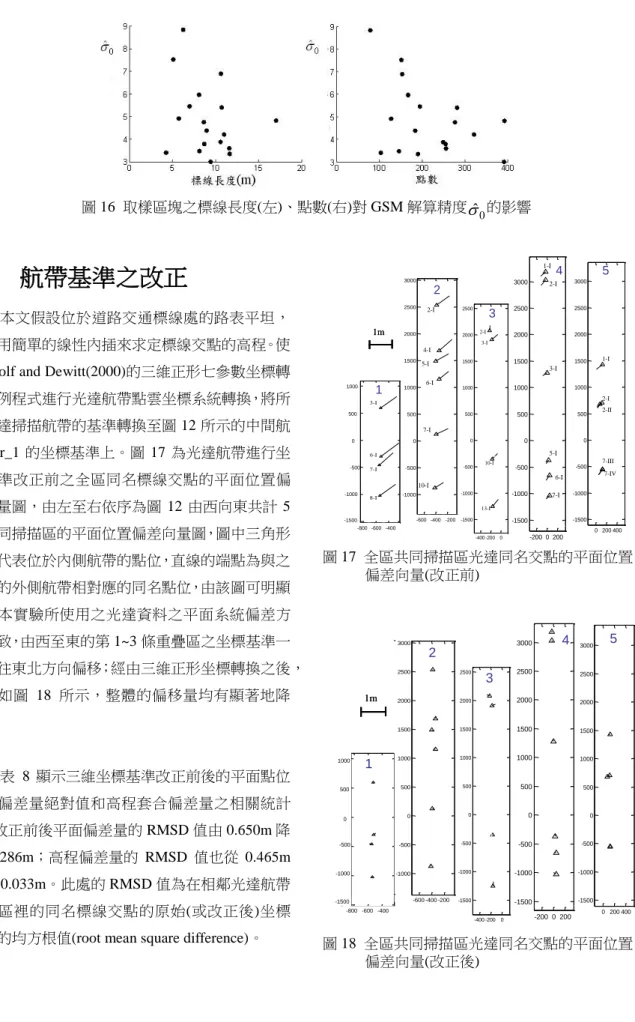
影像航帶寬度,為了能統一空照影像和空載光達點 雲這兩種資料的坐標基準並提供分布良好的地控 點供空三使用,因此在各條相鄰光達航帶共同掃描 區內,找尋分布良好之同名標線交點,一方面藉以 評估相鄰空載光達航帶點雲坐標基準之間的系統 偏 差 量 , 並 使 用 三 維 正 形 轉 換 (3-D conformal transformation)來施行不同航帶光達點雲的擬合平 差,藉以改正航帶間之基準不一致,另一方面,將
坐標基準改正後的標線交點坐標當成空三地控點 位,經光束法區域平差來求解空照影像的外方位,
提供後續航空攝影測量和空載光達測量整合研究 之用。
光達點位的系統性誤差為某種變形行為,本 文採行之正形七參數轉換僅作簡易的坐標基準改 正,俾將本文的主題定位在提出 GSM 法並分析其 求定標線交點的實驗成果與說明其應用。
圖 11 實驗流程圖
4. 實驗成果與分析
4.1 實驗資料簡介
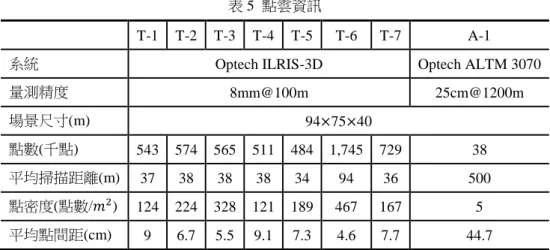
本文使用的實驗資料包括空載光達點雲和空 照數位影像,資料規格分別如表 2 與表 3 所示,實 驗區位於台南市成功大學及附近的都會區,地勢平
坦且有豐富的交通路網,適合做為道路交通標線的 選取。圖 12 之左圖顯示光達掃描航帶的涵蓋範圍,
光達航帶寬度約為 300 公尺、長度約 5~7 公里,虛 線部分為所有空照影像的地面攝影範圍,包含了整 個成功大學校區,影像重疊及分佈如圖 12 之右圖 所示。
本實驗首先由人工挑選標線交點區,依實驗 目的而言,挑選出的交點可分成兩類:
I. 落於兩條相鄰光達航帶的共同掃描區;
II. 僅位於單一條光達航帶。
第 I 類的交點主要是用於光達航帶之坐標基 準偏差量的計算,點位分佈如圖 12 左圖之黑色三 角形,整個測區共有 27 點。為了達到光達與影像 整合的目的,特徵點的選取也要配合空照影像攝影 的地面範圍,使得點能盡量分佈於影像的 Von Gruber Point Area 中,以獲取較佳的空三求解幾何;
但對於空三求解幾何而言,落於空三區域裡的第 I 類交點的數量太少且分佈不甚理想(如圖 12 右圖中 所示之三角形),有必要再挑選更多的交點,因此 第 II 類交點的挑選是為了提供分布良好的空三地 控點,除了圖 12 右圖所示的 8 個第 I 類交點之外,
於個別航帶中另外又挑選了 28 個第 II 類交點。
在實驗區內,蒐集到可用的交通標線主要有 兩類:停止線、中央雙黃線,其尺寸和規格如圖 13 所示,其中,圖 13 右圖為一個實例,一條白色 停止線垂直於中央雙黃線,GSM 法先求定兩者的 直線參數,再求算其交點坐標。在沒有車輛遮蔽的 情況下,停止線的取樣長度視車道的寬度而定,雙 黃線的取樣長度一般較停止線長。在本文的實驗區 內,停止線取樣長度約 3~5 公尺,雙黃線約 5~15 公尺。
84 航測及遙測學刊 第二十卷 第二期 民國 105 年 04 月
+2544000(m)
+170000(m)
圖 12 實驗區之光達點雲航帶及空照影像之分佈範圍
圖 13 道路交通標線之停止線(左)、中央雙黃線(中)的規格與尺寸、實際交通標線影像圖(右)
N
-500 0 500
-3000 -2000 -1000 0 1000 2000 3000 4000 5000
光達點雲航帶涵蓋範圍示意圖(TWD97投影坐標系)
+170000(單 位 : 公 尺 )
+2544000(單位:公尺)
Str1 Str3 Str4 Str7 Str8 Str9 平差連結點
Str_8 Str_9
Str_3 Str_1
Str_4
Str_7
0391 0392 0393 0394 0395 0396
表 2 空載光達規格 儀器型號 Optech ALTM 3070
掃描航高 500m
飛行速率 160 km/h
掃描頻率 50 kHz
掃描點密度 約 6 點/m2
回波值 1st~4th(一束雷射光最多記 錄四個回波值)
FOV 40°(本實驗區為 36°)
Footprint 尺寸 500m(航高)×0.3mrad=15cm Intensity capture
每個觀測量以 12bit 的動 態長度記錄
坐標系統 TWD97
平面先驗精度 ±1/2000 * 500m(航高) =
±25cm(1σ)
高程先驗精度 <±15cm (1σ; 航高 1200m) 本批資料約±5cm
像機名稱 VEXCEL UltraCamD 使用像片數 6 張(同一航帶) 像片編號 0391~0396
平均重疊率 End Lap: 80%; Side Lap: 40%
像幅尺寸 7500×11500 (pixel) 像機焦距 101.4 mm
像元尺寸 9μm×9μm 平均航高 1320 m 地面解析力 約 12 cm(≒
9μm×1320m/101.4mm) 波段類型 R/G/B & NIR/R/G
波段型態 各波段資料以 8bit 的長度記
錄
表 3 空照數位影像規格
李宏君、蔡展榮:GSM 法-從空載光達點雲萃取道路交通標線交點 85
4.2 高斯曲面匹配 GSM 解算成 果
本節的實驗與分析將著重於探討實驗區中兩 種最主要的標線(雙黃線、停止線)的精度、及影響 其精度的原因。首先比較路表特性(新舊路面、標 線磨損程度)相近實驗區的求解精度,所挑的實驗 區是位於成功大學光復操場附近,約 50m×50m 之 小範圍內的 3 個路口之停止線與雙黃線交會處。雙 黃線與停止線取樣區塊之點數、標線長度以及相關 的統計參數分別整理如表 4,高斯函數面 I(X,Y)與 實際光達(X,Y,I)點雲之擬合結果如圖 14 與圖 15 之 剖線圖所示,兩圖顯示高斯曲面 I(X,Y)和交通標線 區的光達回波強度點群(X,Y,I)有良好的套合,表 6 與表 7 顯示光達回波強度值約在[49, 286]之間且 8 個計算例的套合精度約3~7。
以雙黃線實驗區而言,由表 4 觀察到 Str_9-5-1
與 Str_9-3-1 在標線上分佈的點雲都比 Str_9-4-1 與 Str_9-2-1 來的密集,是因為前兩區塊之光達掃描線 與標線之間所呈的夾角較後兩區塊來的小,使得同 一光達掃描線上與標線有交集的雷射光點就會愈 多,標線上的觀測點之數量就會愈豐富,故此兩條 標線的整體 GSM 求解精度較佳。另外由圖 16 所 繪之實驗區中所有雙黃線實驗區塊之「標線長度」
與「點數」對整體 GSM 解算精度的散佈關係亦可 得知,當標線長度愈長、點數愈多,則
ˆ0
的最大
值越小,整體 GSM 的解算精度有愈佳之趨勢。
在 GSM 法平差解算得到圖 9 所示的直線標線 參數θ、Ty 及其協變方矩陣後,就可以簡單的線性 方程式求解來得到垂直交會的兩條直線型交通標 線的交點坐標,也可以誤差傳播原理來估計交點坐 標的後驗中誤差。
表 4 雙黃線點雲取樣區塊之基本統計量描述
實驗區塊 Str_9-5-1 Str_9-4-1 Str_9-2-1 Str_9-3-1
光達回波強度 示意圖
光達點數 256 184 153 190
標線長度 約 11.58 m 約 9 m 約 10.6 m 約 11.6 m
門檻值 T 70 80 90 70
標準偏差 (ˆb ; ˆl)
< T > T < T > T < T > T < T > T
±5 ±22.7 ±4.7 ±20 ±8.1 ±18.7 ±4 ±17.9 權比例關係
(ˆb2)/(ˆb2 ;ˆl2)
< T > T < T > T < T > T < T > T 1.0 0.048 1.0 0.055 1.0 0.188 1.0 0.05
86 航測及遙測學刊 第二十卷 第二期 民國 105 年 04 月
表 5 停止線點雲取樣區塊之基本統計量描述
實驗區塊 Str_9-5-2 Str_9-4-2 Str_9-2-2 Str_9-3-2
光達回波強度 示意圖
點雲數量 74 49 71 42
標線長度 約 2.39 m 約 2.59 m 約 2.93 m 約 1.52 m
門檻值 T 90 80 100 100
中誤差 (ˆb ; ˆl)
< T > T < T > T < T > T < T > T
±10.7 ±54 ±4.4 ±38.8 ±9.4 ±83.9 ±6.7 ±35.2 權比例關係
(ˆb2 )/(ˆb2 ;ˆl2)
< T > T < T > T < T > T < T > T 1.0 0.039 1.0 0.013 1.0 0.013 1.0 0.036
表 6 雙黃線 GSM 計算成果
實驗區塊 θ(deg) Ty(m) D(m) A a
Str_9-5-1
初始值 -7.512 2566383.075 0.46 115.43 50.084 最或是值 -7.785 2567203.813 0.341 133.07 49.04
後驗
ˆ
±0.038 ±0.003 ±0.004 ±2.02 ±0.28 ˆ0 ±3.59
Str_9-4-1
初始值 83.935 948673.428 0.42 139.55 56.88 最或是值 84.792 684242.076 0.27 151.56 56.67 後驗
ˆ
±0.216 ±0.005 ±0.007 ±3.73 ±0.35ˆ0
±4.39
Str_9-2-1
初始值 83.848 971404.539 0.32 143.2 61.93 最或是值 84.793 684061.599 0.292 154.14 59.59 後驗
ˆ
±0.063 ±0.003 ±0.004 ±2.5 ±0.7ˆ0
±6.89
Str_9-3-1
初始值 -10.536 2575668.531 0.38 107.01 59.67 最或是值 -9.233 2571693.871 0.358 122.21 59.19 後驗
ˆ
±0.098 ±0.005 ±0.006 ±2.45 ±0.292ˆ0
±3.35
李宏君、蔡展榮:GSM 法-從空載光達點雲萃取道路交通標線交點 87
表 7 停止線 GSM 計算成果
實驗區塊 θ(deg) Ty(m) D(m) A a
Str_9-5-2
初始值 87.709 -1694840.313 0.44 206.68 52.05 最或是值 82.061 1327834.667 0.347 239.76 49.94 後驗
ˆ
±0.311 ±0.005 ±0.007 ±8.72 ±0.96ˆ0
±7.01
Str_9-4-2
初始值 -3.032 2553026.057 1.02 204.78 60.19 最或是值 -4.4 2557090.159 0.306 280.1 60.19 後驗
ˆ
±0.452 ±0.006 ±0.010 ±11.27 ±0.66ˆ0
±3.68
Str_9-2-2
初始值 -3.402 2554204.6 0.26 202.78 66.44 最或是值 -5.053 2559114.246 0.393 286.32 62.13 後驗
ˆ
±0.113 ±0.002 ±0.003 ±8.3 ±0.5ˆ0
±3.52
Str_9-3-2
初始值 70.604 2062614.677 0.22 251.43 60.86 最或是值 76.581 1833585.841 0.323 270.45 59.37 後驗
ˆ
±1.409 ±0.012 ±0.007 ±7.04 ±0.59ˆ0
±3.46
圖 14 光達(X,Y,I)點雲與高斯數學面 I(X,Y)擬合圖 (雙黃線)
圖 15 光達(X,Y,I)點雲與高斯數學面 I(X,Y)擬合圖 (停止線)
Str_9-5-1 Str_9-4-1
Str_9-2-1 Str_9-3-1
-1 -0.5 0 0.5 1 -1.5 -1 -0.5 0 0.5 1 1.5
X X
-0.5 0 0.5
X
-1.5 -1 -0.5 0 0.5 1 X