國立臺灣大學電機資訊學院電機工程學系 碩士論文
Department of Electrical Engineering
College of Electrical Engineering and Computer Science National Taiwan University
Master Thesis
使用主動式電感之振盪器動態系統分析及製程、電壓與溫度補 償設計
Dynamical Systems Analysis and PVT Compensated Design for Oscillator Using Active Inductor
邱永全
Yung-Chuan Chiu
指導教授:鄭士康 博士 Advisor: Shyh-Kang Jeng, Ph.D.
中華民國 106 年 7 月
i
誌謝
首先非常感謝指導教授鄭士康老師在這些年中耐心地給予教導與幫助,在研 究上激勵我們勇於創新及突破,在面對人生境遇上也給予關懷與鼓勵,有幸獲得 教授如此幫助,感激不盡!感謝口試委員陳怡然教授給予寶貴的建議與提醒,並 感謝口試委員李鐏鐶技術長所提出的關鍵問題與未來展望,使本論文能更趨完整。
感謝公司部門中的前輩同事們在類比電子領域方面不吝給予教導及協助。感 謝 JEMG 電磁研究小組、JCMG 電腦音樂研究小組以及 JAMG 代理人程式與多媒 體研究小組中的學長與同學們在研究討論上總是激盪出許多有趣的想法,並且在 學業上相互扶持與幫助。
最後要感謝親愛的家人與摯友們在這段時間的包容、鼓勵與陪伴,在精神上 給予我莫大的支持與力量。
再次感謝這一路上給予幫助的每個人,使我得以完成論文與學業,謝謝你們!
iii
中文摘要
在討論主動式電感振盪器的文獻中,本篇論文首次採用電晶體大信號模型以 及動態系統分析。相較以往常用的電晶體小信號模型與阻抗分析,能得到更接近 主動式電感振盪器實際運作之波形與軌跡特徵。論文內採用 SMIC 0.11-μm 製程模 型來模擬主動式電感振盪器,配合低壓差穩壓器(LDO)以及帶隙(bandgap)參 考電壓實現電壓及溫度補償設計,使原本在−20~100°C 的溫度範圍中,振盪頻率 隨溫度的變化率從 6.48%降低至 1.60%。在 3.0~3.6 V 的供應電壓範圍內,振盪頻 率的變化率也減低至±0.57%。在製程偏移的部分,使用電容修整陣列,讓振盪頻 率在不同製程角(process corner)的情況下皆能夠修整回 540 MHz,修整誤差(trim error)在±0.21%以內。
關鍵字:主動式電感、振盪器、動態系統、製程、電壓與溫度補償、低壓差穩壓 器。
ABSTRACT
In the research on the oscillators using active inductor, it is first time to propose dynamical systems analysis with large-signal model for the oscillators in this thesis.
Comparing to impedance analysis with small-signal model, we can approach more practical waveform and characteristics of the trajectories of the oscillator by dynamical systems analysis with large-signal model. The oscillator presented in this thesis is simulated with SMIC 0.11-μm process model. For the voltage and temperature compensated design, we adopt an LDO and a bandgap reference circuit. Therefore, the oscillation frequency variation is reduced from 6.48% to 1.60% across temperature −20
°C to 100°C, and the frequency variation in the supply voltage range from 3.0 V to 3.6 V is ±0.57%. For the process variation, the oscillator using capacitor trimming array could achieve the desired frequency 540 MHz within trim error ±0.21% in any process corner.
Keyword: active inductors, oscillators, dynamical systems, PVT compensation, low-dropout regulator.
v
目錄
口試委員會審定書 ...i
誌謝 ... ii
中文摘要 ... iii
ABSTRACT ...iv
目錄 ... v
圖目錄 ... vii
表目錄 ...ix
第一章 緒論 ... 1
1.1 研究動機與目的 ... 1
1.2 章節概要 ... 1
1.3 本論文貢獻 ... 2
第二章 背景知識 ... 3
2.1 Gyrator 電路原理 ... 3
2.2 無損單端 Gyrator-C 主動式電感 ... 4
2.3 有損單端 Gyrator-C 主動式電感 ... 6
2.4 基本電晶體實現之 Gyrator-C 主動式電感 ... 8
2.5 線性度與大信號分析 ... 9
第三章 動態系統分析 ... 12
3.1 穩定性分析 ... 12
3.2 LC 諧振電路 ... 13
3.3 無損 Gyrator-C 主動式電感連接一電容 ... 15
3.4 電晶體小信號模型組成之主動式電感 ... 17
3.5 電晶體大信號模型組成之主動式電感 ... 23
第四章 定頻振盪器 ... 29
4.1 基礎電路 ... 29
4.2 低壓差穩壓器(LDO) ... 32
4.2.1 低壓差穩壓器(LDO)過載電流(Over-current) ... 34
4.2.2 傳輸電晶體(Pass Transistor)飽和區模式檢驗 ... 35
4.2.3 低壓差穩壓器(LDO)之穩定度(Stability) ... 36
4.2.4 電壓補償設計 ... 38
4.3 溫度補償電路 ... 39
4.3.1 負溫度係數電壓 ... 39
4.3.2 正溫度係數電壓 ... 40
4.3.3 帶隙(bandgap)參考電壓 ... 41
4.3.4 溫度補償設計 ... 41
4.4 電容修整陣列(Trim Array) ... 44
第五章 結論 ... 47
參考文獻 ... 48
vii
圖目錄
圖 2-1 Gyrator 原理示意圖[5]。 ... 3
圖 2-2 無損單端 gyrator-C 主動式電感[3]。 ... 4
圖 2-3 轉導器的基本架構[3]。 ... 5
圖 2-4 有損單端 gyrator-C 主動式電感[3]。 ... 6
圖 2-5 以兩個電晶體所實現之主動式電感[6]。 ... 8
圖 2-6 轉導器信號分析[10]。 ... 9
圖 2-7 (a)電晶體所實作之單端主動式電感[3]。(b)大信號模型之單端主動式電 感。 ... 11
圖 3-1 LC 並聯電路。 ... 13
圖 3-2 (a)LC 並聯電路動態系統之相圖。(b)軌跡所對應之電壓電流隨時間變化 圖。 ... 15
圖 3-3 無損 gyrator-C 主動式電感連接一電容C2。 ... 16
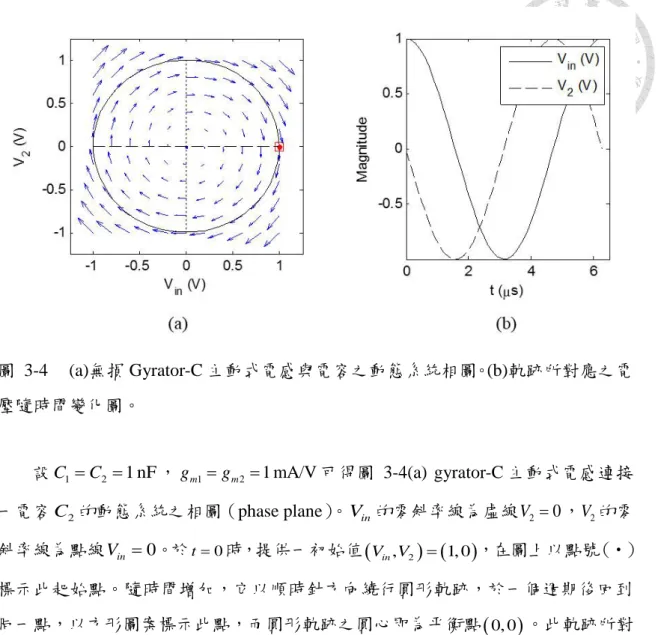
圖 3-4 (a)無損 Gyrator-C 主動式電感與電容之動態系統相圖。(b)軌跡所對應之 電壓隨時間變化圖。 ... 17
圖 3-5 (a)電晶體所實作之單端主動式電感與電容。(b)電晶體小信號模型組成 之主動式電感與電容。 ... 18
圖 3-6 (a)電晶體小信號模型組成之主動式電感與電容之動態系統相圖。(b)軌 跡所對應之電壓隨時間變化圖 ... 19
圖 3-7 (a)由一轉導器實現之單端負阻電路[3]。(b)由電晶體小信號模型組成之 主動式電感、電容以及單端負阻電路所組成之振盪電路。 ... 20
圖 3-8 (a)由電晶體小信號模型組成之主動式電感、電容以及單端負阻電路所組 成之振盪電路之動態系統相圖。(b)軌跡所對應之電壓隨時間變化圖 .. 22
圖 3-9 (a)電晶體所實作之單端主動式電感與電容。(b)電晶體大信號模型組成 之主動式電感與電容。 ... 23
圖 3-10 (a)電晶體大信號模型組成之主動式電感與電容之動態系統相圖。(b)軌 跡所對應之電壓隨時間變化圖。 ... 24 圖 3-11 由電晶體大信號模型組成之主動式電感、電容以及單端負阻電路所組成
之振盪電路。 ... 25
圖 3-12 (a)由電晶體大信號模型組成之主動式電感、電容以及單端負阻電路所組 成之振盪電路之動態系統相圖。(b)初始值為
v vin, sgp
0, 1
之軌跡所 對應之電壓隨時間變化圖。 ... 26圖 4-1 差動主動式電感振盪器[11]。 ... 29
圖 4-2 (a)差動主動式電感之小信號等效電路。(b)主動式電感由小信號模型推 導之等效電路[11]。 ... 30
圖 4-3 低壓差穩壓器之基本電路。 ... 32
圖 4-4 在 SS corner、供應電壓 3.6 V、溫度−20°C 的條件下之傳輸電晶體電流, 三條線各別代表傳輸電晶體之 multiplier 為 150、170 以及 190 的情況。 ... 34
圖 4-5 在 SS corner、供應電壓 3.0 V 及負載電流 35 mA 的條件下,低壓差穩壓 器之輸出電壓VLDO及傳輸電晶體之汲源電壓VDS與飽和電壓VDSsat隨溫 度的變化。 ... 35
圖 4-6 穩定度交流分析之電路設置。 ... 36
圖 4-7 低壓差穩壓器穩定度分析之波德圖(Bode plot)與相位圖。 ... 37
圖 4-8 正比於絕對溫度(PTAT)之電壓差[12]。 ... 40
圖 4-9 帶隙(bandgap)參考電壓[12]。 ... 41
圖 4-10 主動式電感振盪器之振盪頻率隨溫度變化圖。 ... 43
圖 4-11 低壓差穩壓器輸出電壓VLDO隨溫度變化圖 ... 43
圖 4-12 電容修整陣列電路。 ... 44
圖 4-13 FF、TT 與 SS 三種製程角(process corner)中,振盪頻率隨修整位元 組(trim byte)的變化。 ... 45
ix
表目錄
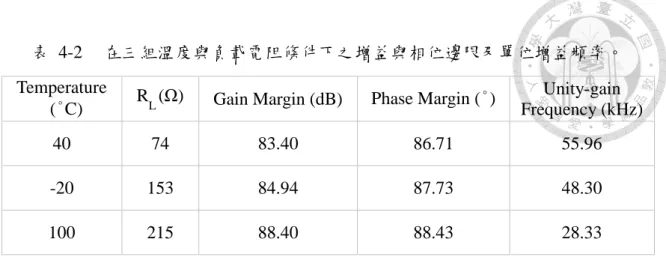
表 4-1 主動式電感振盪器之電路參數與數值 ... 31 表 4-2 在三組溫度與負載電阻條件下之增益與相位邊限及單位增益頻率。 .. 38 表 4-3 三種供應電壓下,主動式電感振盪器之振盪頻率與低壓差穩壓器之輸出
電壓與輸出電流。 ... 38 表 4-4 電容修整陣列中電容之電容值。 ... 44 表 4-5 FF、TT 與 SS 三種製程角(process corner)條件下,使振盪頻率修整
至 540 MHz 的修整位元組(trim byte)、修整誤差(trim error)與頻率 範圍。 ... 46
1 第一章 緒論
1.1 研究動機與目的
時脈(clock rate)與供應電壓(supply voltage)為積體電路運作的兩大基石,
電路中的時脈由振盪器提供,常見的振盪器有晶體振盪器、LC 振盪器與弛張
(relaxation)振盪器等。晶體振盪器的頻率穩定度非常好,是最常見的線性振盪 器,然而因無法製作於積體電路晶片上,需另外購買,且為了從外部與積體電路 相連接,需要耗費一至兩根的接腳(pin),皆會增加量產時的成本負擔。採用傳統 螺旋式電感的 LC 振盪器,因面積大、品質因子(Q factor)不突出,且製造完成 後電感值不容易實現可調的功能,因此在使用上有其限制。非線性的弛張振盪器 比線性振盪器容易設計,且容易製作於積體電路晶片上,然而跟線性振盪器相比,
其相位雜訊(phase noise)較多,頻率穩定度也較差[1]。
最早於 1991 年[2]所提出的主動式電感,以 MOS 電晶體組合而成,與傳統螺 旋式電感相比,其具有較大且可調控的電感值、占用的晶片面積小,並且可完全 在數位導向的 CMOS 技術中實現[3],因此相當適合作為壓控振盪器(VCO)使用。
然而其相位雜訊、線性度以及動態範圍(dynamic range)尚有改善空間,且容易受 製程、供應電壓以及溫度的變化所影響[4],因此在本論文中將針對線性度進行分 析,並且嘗試製程、電壓與溫度的補償設計,期望能在主動式電感振盪器的應用 發展上奉獻一己之力。
1.2 章節概要
本篇論文共有五章。在 2 將會更詳細介紹主動式電感以及振盪器的運作原理,
並且在最後一節針對線性度進行大信號分析。3 聚焦於 LC 以及主動式電感振盪器
2
1.3 本論文貢獻
此研究之貢獻在於,針對線性度採用大信號模型與動態系統分析,以及定頻 振盪器的製程、電壓與溫度補償設計。
2 第二章 背景知識
2.1 Gyrator 電路原理
圖 2-1 Gyrator 原理示意圖[5]。
Gyrator 為一被動、線性、無損、雙埠電路元件,於 1948 年由 Bernard D. H.
Tellegen 所提出[5]。一理想的 gyrator 可將一端電流與另一端之電壓耦合,瞬間電 流與瞬間電壓之間的關係為
2 1
1 2
v Ri
v Ri
(2.1)
其中R為此 gyrator 之 gyration 電阻。由圖 2-1 可見 gyration 電阻在 gyrator 中具方 向性。依照慣例,在箭號頭端的電壓v2為箭號尾端的電流i1與 gyration 電阻之乘 積;在箭號尾端的電壓v1為箭號頭端的電流i2與 gyration 電阻之乘積,再加上一負 號,如(2.1)所示。
4
2.2 無損單端 Gyrator-C 主動式電感
一個 gyrator 可由兩個轉導器組合而成。當此 gyrator 之一埠與電容相連,如圖 2-2,則此電路稱為 gyrator-C。當 gyrator-C 電路中的轉導器其輸入與輸出阻抗皆為 無限大,且其轉導值為常數,則此 gyrator-C 電路為無損。輸入電流與輸入電壓之 間的關係為:
1 1 1 2
2 2 2
m m m in
in m m
G V G G V
I G V G
sC sC
(2.2)
其中s為拉普拉斯轉換中之複數頻率
s j
。輸入阻抗為:1 2
in in
in m m
V sC
Z I G G (2.3) 圖 2-2 無損單端 gyrator-C 主動式電感[3]。
(2.3)式顯示,此一 gyrator-C 從輸入端所見之電路行為表現如同一單端、無損之電 感器,其電感值為:
1 2
m m
L C
G G (2.4)
因此 gyrator-C 電路可使用於合成電感器,此電感器即稱為 gyrator-C 主動式電感。
Gyrator-C 主動式電感之電感值直接與另一埠之電容值C成正比,而與兩個轉導器 之轉導值之乘積成反比。此 gyrator-C 電路在所有頻率範圍中皆表現為電感性。另 外,gyrator-C 也可以如圖 2-2(b),先連接於轉導器輸入端的負端,於回授的部分 再接上轉導器輸入端的正端。
圖 2-3 轉導器的基本架構[3]。
雖然 gyrator-C 電路中的轉導器可以使用許多不同的方式進行配置,但由於此 合成電感器需滿足大的頻率範圍、小的功率消耗,以及小的晶片面積,在這些要 求下,使得 gyrator-C 中的轉導器需要盡可能簡潔地配置。圖 2-3 為 gyrator-C 主動 式電感電路架構中所廣泛採用的基本轉導器架構。以圖 2-3(a)的共源極轉導器為 例,當vin增大,iD隨之增大,而io I iD,故io將減少。由vin與io的關係,可知 共源極轉導器之轉導值為負值,如同圖 2-2 中,連接於轉導器輸入端之負端。至 於共閘極與共汲極轉導器的轉導值則為正值,如同連接於轉導器輸入端之正端。
6
2.3 有損單端 Gyrator-C 主動式電感
圖 2-4 有損單端 gyrator-C 主動式電感[3]。
當 gyrator-C 電路中的轉導器,其輸入或輸出阻抗大小為有限時,則此合成電 感即不再是無損的。並且,此 gyrator-C 電路僅在特定的頻段內表現為電感性。
考慮圖 2-4 中的 gyrator-C 電路,其中Go1與Go2各別代表節點 1 以及節點 2 上 的總電導。以Go1為例,此總電導是來自於轉導器 1 的有限輸出阻抗以及轉導器 2 的有限輸入阻抗。為簡化分析,假設轉導器之轉導值為常數。節點 1 與 2 由克希 荷夫電流定律可得
1 1 2 1 1
2 2 1 2 2
0 0
o m
in o m
sC G V G V
I sC G V G V
(2.5)
由節點 2 看入之輸入導納為
2 2
1 1 1
1 2 1 2
in 1
in o
o
m m m m
Y I sC G
V C G
s G G G G
(2.6)
(2.6)可如圖 2-4 由 RLC 電路所表示,其各別的值為
2 2
1
1 2
1
1 2
1 , ,
, .
p o
p
o s
m m
m m
R G
C C
R G
G G L C
G G
(2.7)
當考慮了轉導器之輸入及輸出電導,則 gyrator-C 電路表現如一有損電感器,
其寄生並聯電阻為Rp,並聯電感為Cp,串聯電阻為。為了使電感器之損耗降到 最低,Rp應盡可能大,而Rs應盡可能的小。另外,由(2.7)可發現,此主動式電感 之電感值,不會受到轉導器之輸入及輸出阻抗所影響。Rp與Cp單單由Go2與C2所 決定。而Go1與C1僅影響Rs與L。
由 RLC 電路可知,此主動式電感器之諧振頻率為
1 2
1 2
1 2
1 m m ,
o t t
p
G G C C LC
(2.8)
其中
1,2 1,2
1,2 m t
G
C (2.9)
(2.9)為轉導器之截止頻率。o為 gyrator-C 主動式電感之自諧頻率,也是此主動式 電感的最高操作頻率。
一 Gyrator-C 主動式電感透過 RLC 等效電路可完全表現出其小信號行為特 徵。然而 RLC 等效電路無法使用於量化其大信號之行為,例如電感值與轉導器之 直流偏壓條件之相依性,以及振盪之最大幅度。
8
2.4 基本電晶體實現之 Gyrator-C 主動式電感
圖 2-5 以兩個電晶體所實現之主動式電感[6]。
如 2.2 所討論的,由於 gyrator-C 需要由一個轉導器提供正的轉導值,另一轉 導器提供負的轉導值,可提供正轉導值之基本轉導器為共閘極與共汲極轉導器,
而可提供正轉導值之基本轉導器為共源極轉導器,故 gyrator-C 可由共閘極與共源 極轉導器組成,或由共汲極與共源極轉導器組成。另外電晶體的部分可選擇 PMOS 或 NMOS,因此組合方式如圖 2-5,總共有八種。圖 2-5(a)-(d)為共源極與共汲極 轉導器的組合,圖 2-5(e)-(h)為共源極與共閘極轉導器的組合。
最早的主動式電感架構由 Ismail [2] 等人所提出,將兩個 NMOS 以共源極與 共汲極的方式所構成,如圖 2-5(a),而後由[7]的作者們所改良。可達到非常高的 品質因子,且可在相當寬的頻寬中維持電感性。然而為維持適當的運作,此電路 需要至少2Vt VD atS 的供應電壓,因此此架構不適合使用於低供應電壓的應用。另 一方面,圖 2-5(c)-(d)的電路[8]雖然僅需Vt2VD atS 的供應電壓,然而,為了使電 晶體運作於飽和區,此電路需滿足VDSat2 Vt1 Vt2 的條件。在現今的 CMOS 製程 技術中,PMOS 與 NMOS 的臨界電壓大小差異並不大,這將迫使M2運作於弱反轉 區,導致電路無法使用於高頻應用。
圖 2-5(e)-(f)的電路由[9]所提出,僅需Vt VD atS 的供應電壓,且兩個電晶體僅
需共用同一個偏壓電流,因此此電路適合低功率以及低電壓的應用。但是此電路 之品質因子相當小,必須配合負阻電路增強品質因子。然而加上負阻電路後,增 加的寄生電容將會使自諧頻率降低,並且增加功率消耗。共閘極與共源極的主動 式電感還可以由另一種方式組成,如圖 2-5(g)-(h)[6]。此電路需Vt 2VD atS 的供應 電壓,因此也適合低電壓的應用。與圖 2-5(e)-(f)相比,圖 2-5(g)-(h)的每個電晶體 皆可各別使用偏壓電流,獨立控制其直流偏壓條件,使得電感值的調整更有彈性。
也因此,後續線性度、大信號模型以及動態系統分析便採用圖 2-5(g)的架構來進 行討論。
2.5 線性度與大信號分析
圖 2-6 轉導器信號分析[10]。
先前關於 gyrator-C 主動式電感的討論,皆假設轉導器之轉導值為線性。以圖 2-6 為例,閘極至源極之瞬時總跨壓為
GS GS gs
v V v (2.10) VGS為直流偏壓,vgs為輸入電壓信號。而瞬時汲極總電流iD則為
21
D 2 n GS gs t
i k V v V
(2.11)
10
1 2
2
2
n gs n GS t gs
gs GS t
k v k V V v
v V V
(2.12)
在此條件下,即可忽略(2.11)中的最後一項,並將瞬時汲極總電流改寫為
1 2
2
D D d
D n GS t
d n GS t gs
i I i
I k V V
i k V V v
(2.13)
此時,轉導值為
d
m n GS t
gs
g i k V V
v (2.14)
然而小信號的條件僅適用於轉導器之輸入電壓信號振幅小的情況。為使振盪 器不容易受到雜訊影響,電壓振幅不可太小,但當電壓振幅大,轉導器將出現非 線性的特徵,汲極電流信號將變回
1 2d n GS t gs 2 n gs
i k V V v k v (2.15) 為觀察電壓信號振幅大的時候,主動式電感的特性,故將電晶體以大信號模 型進行分析。採用的架構為圖 2-5(g)共閘極與共源極的主動式電感,配合適當的 直流偏壓電流I1與I2,即圖 2-7(a)。將電晶體置換為大信號等效電路模型,如圖 2-7(b)。瞬時輸入總電壓包含直流偏壓與輸入電壓信號
IN IN in
v V v (2.16) 為求簡化,NMOS 仍以小信號等效電路模型進行分析,運算不考慮直流偏壓與直 流電流源的部分,只聚焦於電壓信號與電流信號。
圖 2-7 (a)電晶體所實作之單端主動式電感[3]。(b)大信號模型之單端主動式電 感。
2
1
2
gsn in
dn mn gsn
t
sgp dn
gsp
p
dp mp sgp sgp
in dp
v v
i g v
v i d
C
i g v k v
i i
(2.17)當輸入電壓信號為一正弦信號
in in sin v
v v t (2.18) 則輸入電流信號為
2
cos cos 2 2 1
4
mp mn in p mn in
in v v
gsp gsp
g g v k g v
i t t
C C
(2.19)
由此式可得知,若電壓信號不滿足小信號的條件,電流信號除了原本電感性的部 分 eq gsp
mp mn
L C
g g ,將多出二倍頻以及直流的成分,此主動式電感將不再是線性,
且無法使用阻抗分析。職是之故,於下一章將採用動態系統分析以剖析此問題。
12
3 第三章 動態系統分析
當考慮大振幅的情形,採用大信號分析後,顯示主動式電感的電流信號含有 二倍頻的成分,也因此在此情況下無法採用阻抗的分析。為能更完整分析大振幅 時主動式電感運作的情形,在這一節將採用動態系統分析。
在數學中,任何描述系統狀態隨時間變化的方程式系統即稱為動態系統。例 如鐘擺的擺動,或生態系中獵食者與其獵物,兩物種之間個數隨時間的變化,這 些數學模型皆為動態系統。
任何規模的動態系統皆具有幾種特徵狀態。其狀態變數可能會達到靜態,例 如當鐘擺靜止的時候。系統也可能處於週期性變化的狀態,如鐘擺規律擺動的時 候。也可能有某些情況使得系統處於非週期性或混亂的狀態。動態系統理論即為 尋找在何種條件下,將會決定系統朝向何種狀態變化的應用數學領域。
3.1 穩定性分析
為得知一平衡點為穩定或不穩定,可透過觀察平衡點之狀態變數受小干擾後 的變化來了解。一般而言,二維動態系統的微分方程可寫為
,dv f v i
dt (3.1)
,di g v i
dt (3.2)
其中 f v w
,
與g v i
, 為給定的非線性函數。在一平衡點
v i0, 0
,兩變數皆不隨時間變動,故(3.1)與(3.2)兩導數皆為 0,
,
f v w 與g v i
, 也為 0。在靠近平衡點的一點
v0 v i, 0 i
, f v w
,
的泰勒展開式為
0 , 0
0,0
f f f ff v v i i f v i v i v i
v i v i
(3.3) 其中 f v與 f i是在平衡點
v i0, 0
上運算的。g v i
, 也有其泰勒展開式,利用 這兩個展開式可使原微分方程(3.1)與(3.2)得以線性化:d v f f
v i
dt v i
(3.4)
d i g g
v i
dt v i
(3.5)
此兩式的一般解為
1t 2t
v Ae Be
(3.6)
1t 2t
i Ce De
(3.7)
其中A、B、C、D、1與2為常數。1與2為矩陣(3.8)的特徵值。
f f
v i
g g
v i
(3.8)
此矩陣為(3.4)與(3.5)之雅可比(Jacobian)矩陣。兩個特徵值的實部決定其穩定性
1 2
1 2
1 2
1 2
Re 0, Re 0 : Re 0, Re 0 : Re 0, Re 0 : Re 0, Re 0 :
穩定平衡點 不穩定平衡點 鞍點
鞍點
(3.9)
實部的大小也決定了靠近或遠離平衡點的速度,而虛部決定了在圓軌跡上的速 度。若其中一個或兩個特徵值之實部為 0,則為分歧(bifurcation)點,依分歧參 數(bifurcation parameter)的變化,會轉變為穩定平衡點或不穩定平衡點。
3.2 LC 諧振電路
14
dv i
dt f i C
di v
dt g v L
(3.10)
平衡點
v i0, 0
上兩導數為 0,由(3.10)兩等式,可知平衡點
v i0, 0
為
0, 0
。雅可比矩陣為
0 1 1 0
C L
(3.11)
特徵值為
1
2
1 1 j LC
j LC
(3.12)
由於兩特徵值之實部皆為 0,可知在平衡點鄰近的位置上,接近或遠離平衡點的速 度皆為 0。
設L為 10 nH,C為 10 nF,可得圖 3-2(a) LC 諧振電路動態系統之相圖(phase plane)。當dv i 0
dt C ,表示電壓v對時間t的變化率為 0,同時i0。故當滿足i0
的條件,則電壓v對時間t的變化率為 0。由此可知,在相圖中i0這條虛線上的 每一點,其電壓v對時間t的變化率皆為 0。因此,i0這條虛線即為電壓v的零 斜率線(nullcline)。從圖上可觀察到,在i0這條虛線上,標示對時間變化率的 箭號,其方向皆為垂直,無水平分量,表示虛線上的每一點,僅有縱軸的電流i對 時間的變化率,而無橫軸的電壓v對時間的變化率。同理可證,di v 0
dt L ,則相 圖上v0這條點線(dotted line),即為電流i的零斜率線(nullcline)。而兩條零斜 率線之交點代入(3.10)中,將使兩導數為 0,故零斜率線的交點即為平衡點
v i0, 0
。圖 3-2 (a)LC 並聯電路動態系統之相圖。(b)軌跡所對應之電壓電流隨時間變化 圖。
於t0時,提供一初始值
v i, 1, 0 ,在圖上以點號(‧)標示此起始點。隨時間增加,它以逆時針方向繞行圓形軌跡,於一個週期後回到同一點,以方形 圖案標示此點,而圓形軌跡之圓心即為平衡點
0, 0
。此軌跡所對應之電壓電流隨 時間變化圖,則如圖 3-2(b),週期為 62.83 ns。從起始點,不論經過多少時間皆未 接近或收斂至平衡點上,也未遠離平衡點,而是固定在一圓形軌跡上週期性變化,吻合特徵值的判別,且此特性可滿足振盪器持續穩定振盪的需求。
3.3 無損 Gyrator-C 主動式電感連接一電容
將 LC 諧振電路中的電感替換成無損 gyrator-C,如圖 3-3,來觀察 gyrator-C 主動式電感連接一電容C2的動態系統。其中,Vin與V2的微分方程為
2 2
2 2
in m
dV g V
dt C f V
(3.13)
16
圖 3-3 無損 gyrator-C 主動式電感連接一電容C2。
平衡點為
0, 0
,雅可比矩陣為2 2 1 1
0
0
m
m
g C g
C
(3.14)
特徵值為
1 2
1
1 2
1 2
2
1 2
m m
m m
j g g C C j g g
C C
(3.15)
與 LC 諧振電路相同,兩特徵值之實部皆為 0,表示在平衡點鄰近的位置上,接近 或遠離平衡點的速度皆為 0。
圖 3-4 (a)無損 Gyrator-C 主動式電感與電容之動態系統相圖。(b)軌跡所對應之電 壓隨時間變化圖。
設C1 C2 1 nF,gm1gm2 1 mA/V可得圖 3-4(a) gyrator-C 主動式電感連接 一電容C2的動態系統之相圖(phase plane)。Vin的零斜率線為虛線V20,V2的零 斜率線為點線Vin 0。於t0時,提供一初始值
Vin,V2
1, 0 ,在圖上以點號(‧)標示此起始點。隨時間增加,它以順時針方向繞行圓形軌跡,於一個週期後回到 同一點,以方形圖案標示此點,而圓形軌跡之圓心即為平衡點
0, 0
。此軌跡所對應之電壓隨時間變化圖,則如圖 3-4(b),週期為 6.283μs。如同 LC 諧振電路,將 平衡點以外的鄰近任一點作為起始點,不論經過多少時間皆不會接近或收斂至平 衡點上,也未遠離平衡點,而是固定在一圓軌跡上週期性變化,此特性可滿足振 盪器持續穩定振盪的需求。
3.4 電晶體小信號模型組成之主動式電感
為了透過動態系統分析基本電晶體所實現之 gyrator-C 主動式電感,先在主動
18
1 ,
in
mn in mp sgp in sgp
sgp mn in
in gsp
dv g v g v f v v
dt C
dv g v
dt C g v
(3.16)
圖 3-5 (a)電晶體所實作之單端主動式電感與電容。(b)電晶體小信號模型組成之 主動式電感與電容。
平衡點為
0, 0
,雅可比矩陣為0
mn mp
mn
gsp
g g
C C
g C
(3.17)
特徵值為
2 4
2
mp mn
mn mn
gsp
g g
g g
C C CC
(3.18)
由於電晶體的閘極電容通常不會大於一般電容的電容值,故在此假設Cgsp C,並 假設gmp gmn,則特徵值為
1
2
3
2 2
3
2 2
mn mn
mn mn
g g
C j C
g g
C j C
(3.19)
兩特徵值之實部皆小於 0,故平衡點為穩定平衡點。
圖 3-6 (a)電晶體小信號模型組成之主動式電感與電容之動態系統相圖。(b)軌跡 所對應之電壓隨時間變化圖
設CCgsp 1 nF,gmn gmp 1 mA/V,可得到圖 3-6(a)電晶體小信號模型組 成之主動式電感與電容之動態系統相圖。虛線vinvsgp為vin之零斜率線,點線
in 0
v 為vsgp之零斜率線。
為使兩個電晶體的運作不進入截止區(cutoff region),故兩個電壓信號vin與vsgp 不可使兩電晶體之閘極對源極跨壓小於臨界電壓
b IN in tn
SGp sgp tp
V V v V
V v V
(3.20)
in b IN tn
sgp tp SGp
v V V V
v V V
(3.21)
其中,Vtn與Vtp為 NMOS 與 PMOS 的臨界電壓,Vb、VIN與VSGp為直流偏壓。設 1
V V V 與V V 1,則
20
因此於圖 3-6(a)上標示vin 1與vsgp 1兩實線作為vin的上限與vsgp的下限。
於t0時,設初始值為
v vin, sgp
1, 0 ,圖中以點號(‧)標示此起始點,從 軌跡可看見它在 15μs的時間中不斷靠近平衡點
0, 0
,圖中的方形標示t15 μs時的座標,已經非常接近平衡點。此軌跡所對應之電壓隨時間變化圖,如圖 3-6(b),
可看見兩電壓信號的振幅不斷衰減,越來越接近 0。此收斂於穩定平衡點的特性,
將使振幅不斷減弱到停止振盪,故無法達到振盪器持續穩定振盪的需求。
為解決此問題,需要加上負阻電路以補償此能量損耗,來達到持續的振盪。
圖 3-7(a)為一轉導器所實現之單端負阻電路,圖 3-7(b)為圖 3-5(b)電晶體小信號 模型組成之主動式電感與電容,再加上單端負阻電路後,所構成之振盪電路。此 振盪電路中,電壓小信號vin與vsgp的微分方程為
1 ,
in
m in mn in mp sgp in sgp
sgp mn in
in gsp
dv G v g v g v f v v
dt C
dv g v
dt C g v
(3.23)
圖 3-7 (a)由一轉導器實現之單端負阻電路[3]。(b)由電晶體小信號模型組成之主 動式電感、電容以及單端負阻電路所組成之振盪電路。
當單端負阻電路中的轉導器其轉導值特意設計為Gm=gmn,則電壓小信號vin與vsgp 的微分方程為
mp sgp in
sgp
sgp mn in
in gsp
dv g v dt C f v
dv g v
dt C g v
(3.24)
平衡點為
0, 0
,雅可比矩陣為0
0
mp
mn
gsp
g C g
C
(3.25)
特徵值為
1
2
mp mn
gsp
mp mn
gsp
j g g CC j g g
CC
(3.26)
得到兩特徵值之實部皆為 0,表示在平衡點鄰近的位置上,接近或遠離平衡點的速 度皆為 0。
設CCgsp 1 nF,gmp gmn 1 mA/V,由微分方程可得圖 3-8(a)振盪電路之 動態系統相圖。vin的零斜率線為虛線vsgp 0,vsgp的零斜率線為點線vin 0。為確 保兩個電晶體不會運作於截止區(cutoff region),則需滿足
in b IN tn
sgp tp SGp
v V V V
v V V
(3.27)
設VbVIN Vtn 1與Vtp VSGp 1,則圖 3-8 (a)上標示的vin 1與vsgp 1兩實線即 為vin的上限與vsgp的下限。
22
圖 3-8 (a)由電晶體小信號模型組成之主動式電感、電容以及單端負阻電路所組 成之振盪電路之動態系統相圖。(b)軌跡所對應之電壓隨時間變化圖
於t0時,提供一初始值
v vin, sgp
1, 0 ,在圖上以點號(‧)標示此起始點,變化軌跡為一圓形,其圓心為平衡點
0, 0
,以順時針方向繞行圓形軌跡一個週期 後回到同一點,以方形圖案標示之。而此軌跡所對應之電壓隨時間變化圖,如圖 3-8(b),週期為 6.283 μs。將平衡點以外的鄰近任一點作為起始點,不論經過多少 時間皆不會接近或收斂至平衡點上,也未遠離平衡點,而是固定在一圓軌跡上週 期性變化。由此可知,加上一單端負阻電路後,即可改善原先會衰減、收斂至穩 定平衡點而無法持續穩定振盪的問題,使得電晶體小信號模型主動式電感與電容 可實現振盪器之功能。3.5 電晶體大信號模型組成之主動式電感
圖 3-9 (a)電晶體所實作之單端主動式電感與電容。(b)電晶體大信號模型組成之 主動式電感與電容。
為了了解主動式電感所實現之振盪器,其振盪幅度大的時候的情形,因此採 用電晶體的大信號模型等效電路來分析其所組成之主動式電感。為簡化分析,僅 先考慮 M2 採用大信號模型的情形,M1 維持小信號模型。兩電晶體之汲極電流信 號
2
2
dn mn gsn mn in
p
dp mp sgp sgp
i g v g v
i g v k v
(3.28)
由此得電壓信號vin與vsgp的微分方程
1 2
+ ,
2
in p
mn in mp sgp sgp in sgp
sgp mn in
in gsp
dv k
g v g v v f v v
dt C
dv g v
dt C g v
(3.29)
平衡點為
0, 0
,雅可比矩陣為mp p sgp mp
mn g k v mn g
g g
24
特徵值為
1 2
2 2 4
mn mp
mn mn
gsp
g g g g
C C CC
(3.31)
由於電晶體的閘極電容通常不會大於一般電容的電容值,故在此假設Cgsp C,並 假設gmp gmn,則特徵值為
1
2
3
2 2
3
2 2
mn mn
mn mn
g g
C j C
g g
C j C
(3.32)
由於兩特徵值之實部皆小於 0,故平衡點為穩定平衡點。
圖 3-10 (a)電晶體大信號模型組成之主動式電感與電容之動態系統相圖。(b)軌跡 所對應之電壓隨時間變化圖。
設CCgsp 1 nF,gmn gmp 1 mA/V,kp 1 mA/V2,可得到圖 3-10(a)電晶 體 大 信 號 模 型 組 成 之 主 動 式 電 感 與 電 容 之 動 態 系 統 相 圖 。 其 中 , 虛 線
1 2
i n 2 s g p s g p
v v v 為vin之零斜率線,點線vin 0為vsgp之零斜率線。為確保兩個電晶 體不會進入截止區(cutoff region),則需滿足
in b IN tn
sgp tp SGp
v V V V
v V V
(3.33)
設VbVIN Vtn 1與Vtp VSGp 1,則相圖上標示的vin 1與vsgp 1兩實線即為vin 的上限與vsgp的下限。
於t0時,設初始值為
v vin, sgp
1, 0 ,圖中以點號(‧)標示此起始點,從 軌跡可看見它在 15 μs 的時間中不斷靠近平衡點
0, 0
,圖中的方形標示t15 μs時的座標,已經非常接近平衡點。此軌跡所對應之電壓隨時間變化圖,如圖 3-10(b),
可看見兩電壓小信號的振幅不斷衰減,越來越接近 0。此收斂於穩定平衡點的特 性,將使振幅不斷減弱到停止振盪,故無法達到振盪器穩定振盪的需求。
圖 3-11 由電晶體大信號模型組成之主動式電感、電容以及單端負阻電路所組成 之振盪電路。
為了解決振盪衰減問題,在此同樣採用一單端負阻電路,則電壓信號vin與vsgp 的微分方程為
1 2
+ ,
2
in p
m in mn in mp sgp sgp in sgp
sgp mn in
in gsp
dv k
G v g v g v v f v v
dt C
dv g v
dt C g v
(3.34)
設計負阻電路轉導器之轉導值Gm gmn,則
26
平衡點為
0, 0
,雅可比矩陣為 , 0,0
0 0
0 0
in sgp
mp p sgp mp
mn mn
gsp v v gsp
g k v g
C C
g g
C C
(3.36)
特徵值為
1
2
mp mn
gsp
mp mn
gsp
j g g CC j g g
CC
(3.37)
得到兩特徵值之實部皆為 0,表示在平衡點鄰近的位置上,接近或遠離平衡點的速 度皆為 0。
圖 3-12 (a)由電晶體大信號模型組成之主動式電感、電容以及單端負阻電路所組 成之振盪電路之動態系統相圖。(b)初始值為
v vin, sgp
0, 1
之軌跡所對應之電壓 隨時間變化圖。設CCgsp 1 nF,gmp gmn 1 mA/V,kp 1 mA/V2,可得到加上負阻電路後 的振盪電路之動態系統相圖,即圖 3-12(a)。與未加負阻電路的圖 3-10(a)相比,vsgp 的零斜率線vin 0、vin的上限vin 1與vsgp的下限vsgp 1皆相同,不同的為vin的零
斜率線變為虛線vsgp 0,且各軌跡不會隨時間接近或收斂於平衡點導致電壓振幅 減弱。
為觀察不同起始點的變化軌跡,因此在t0時,設了五組初始值,各別是
0.75, 0
、
0.5, 0
、
0.25, 0
與
0, 0
,圖中以點號(‧)標示各起始點,以方形標 示經過 20μs 的時間後狀態所處的座標。從軌跡可看見狀態在 20 μs 的時間中並沒 有朝平衡點靠近,也沒有遠離、發散。圖 3-12(b)為初始值
0.75, 0
之軌跡所對應之電壓隨時間變化圖,可看見兩個電壓信號週期性的變化。但為了確認隨著時間 增加,電壓狀態最終是否會維持穩定的週期性變化,將根據龐加萊-本迪克松定 理(Poincaré–Bendixson theorem)檢驗此動態系統是否存在極限環(limit cycle),
使得狀態不在平衡點上時,將會於平衡點外的環狀曲線繞著平衡點週期性變化。
兩個電壓信號變化的軌跡可由(3.35)的微分方程推導
2
2
2 2 3
1 +
2
1 +
2
Constant 3
mn in
sgp sgp gsp
in in p
mp sgp sgp
p mn in
mp sgp sgp sgp in
gsp
mp p
mn
in sgp sgp
gsp
g v
dv dv dt C
dv dv dt k
g v v
C
k g v
g v v dv dv
C C
g k
g v v v
C C C
(3.38)為了確定此軌跡所形成之封閉曲線上的狀態將隨時間如何變化,設軌跡之曲線為
,
2 2 33
mp p
mn
in sgp in sgp sgp
gsp
g k
L v v g v v v
C C C
(3.39)
接著對時間微分,若微分後的值小於 0 則表示在曲線上的狀態將隨時間往曲線內 部區域移動,若大於 0 則將隨時間往曲線外部區域移動
2 2
2 1 + 2
2
in sgp
in sgp
p mp p
mn mn in
in mp sgp sgp sgp sgp
gsp gsp
dv dv
dL L L
dt v dt v dt
k g k
g g v
v g v v v v
C C C C C
(3.40)
28
因對時間微分後為 0,表示在此封閉曲線上之狀態將不會隨時間從封閉曲線上往內 部或外部區域移動,而是將繼續維持在此封閉曲線上,則此封閉曲線即為此動態 系統之極限環。如圖 3-12(a),除了平衡點外,不同的起始點有它們各自的軌跡,
即各自不同的L v v
in, sgp
的解。每個極限環鄰近的軌跡皆不會隨時間靠近、進入該 極限環,也不會隨時間遠離該極限環,因為每個軌跡皆在其所屬的極限環上,因 此這些極限環既不是穩定(stable)、不穩定(unstable),也不是半穩定(semi-stable)極限環,而是隨遇穩定(neutrally-stable)極限環。由此可知,即使是電壓振幅大、
電晶體採用大信號模型的例子,電壓信號原本會隨時間收斂於平衡點上停止振 盪,在加上了負阻電路後,電壓信號將能夠持續繞行於極限環上週期性振盪。雖 然信號振幅大時,主動式電感中的電晶體轉導器將顯現其非線性特性,無法如電 感電容諧振電路保持線性、提供正弦波信號,但經適當設計後仍能具備週期性振 盪的特性,確實能勝任振盪器之應用。
4 第四章 定頻振盪器
為了提供 USB 3.0、USB 2.0 以及影像傳輸應用各別所需的 30 MHz、12 MHz 與 27 MHz,因此此定頻振盪器之振盪頻率將會設計於三種頻率的最小公倍數 540 MHz,配合除頻器的使用即可得到這三個不同的頻率。
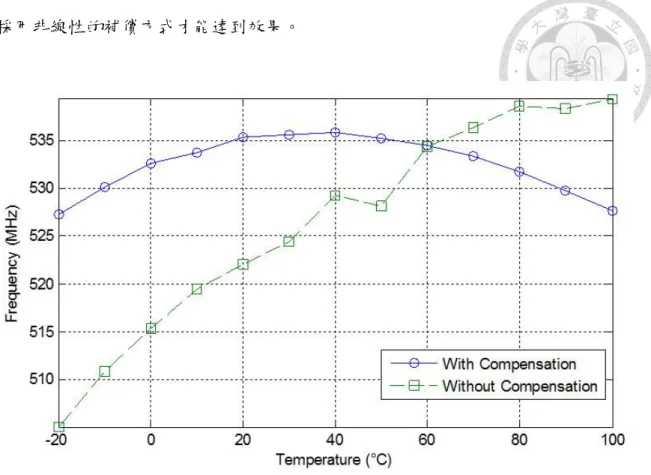
在電壓補償方面,將會使用低壓差穩壓器(LDO)在 3.0 至 3.6 V 的供應電壓 範圍內,提供 2.7 V 的穩定電壓。並設計帶隙(bandgap)參考電壓電路,提供負 溫度係數(complementary to absolute temperature)電壓以實現溫度補償功能。因主 動式電感振盪器之振盪頻率會隨溫度上升而提高,也會隨供應電壓上升而提高,
因此在此刻意將帶隙參考電壓與低壓差穩壓器的輸出電壓設計為隨溫度上升而下 降,以抵消原本會隨溫度上升而提高的振盪頻率。製程偏移方面,採用電容修整
(trimming)的方式,使振盪頻率在不同的製程角(process corner)皆能調整回 540 MHz。
![圖 2-7 (a)電晶體所實作之單端主動式電感[3]。(b)大信號模型之單端主動式電 感。 21 2gsnindnmn gsntsgpdngsp pdpmp sgp sgp in dpv vi g vv i dCig vkvii (2.17) 當輸入電壓信號為一正弦信號 ininsinvvv t (2.18) 則輸入電流信號為 2coscos 22 1 4mpmnin p mn ininv v gsp gsp](https://thumb-ap.123doks.com/thumbv2/9libinfo/9608298.633887/21.892.122.785.114.914/電晶體所實作之單端主動式電感大信號模型之單端主動式電.webp)