國立臺灣大學電機資訊學院電機電信電子產業研發碩士專班
碩士論文
Industrial Technology R&D Master Program in Electrical, Communication and Electronics Engineering
College of Electrical Engineering and Computer Science National Taiwan University
Master Thesis
灰色比例積分控制器應用於高精度時間同步協定 Using Grey Proportional Integral Controller for
Precision Time Synchronization Protocol 李炳輝
Ping-Hui Lee
指導教授﹕張帆人 博士、涂昆源 博士 Fan-Ren Chang, PH. D.、Kun-Yuan Tu, PH. D.
中華民國 97 年 7 月
July 2008
致謝
首先,在此感謝我的指導教授張帆人博士,兩年來耐心的教導以及在進行論文實驗研究
時,無時無刻的關心,時時的給予意見,讓學生能夠對於論文研究上頗為順利。再來就是感 謝我的共同指導老師涂昆源博士,感謝您每次開會都不辭辛勞的由萬能科技大學趕到台大來 指導學生。還有就是和張老師合作十數年的應用力學所的老師王立昇博士,謝謝您願意在每 周三都撥空與每個學生開會並給予學生指導,對您深刻的印象就是兩岸控制研討會的籌備,
讓學生學習到您和張老師對每一件事物都抱持著細心、一絲不苟以及認真的態度,使即將步 入社會的我,多了一個良好的學習機會,常以此心來對待周遭的事物。還要感謝我的父親與 母親,感謝你們對身為子女的我付出無比的關愛,不只是研究所的這兩年,而是從小到大對 身為子女的我的悉心照顧,藉由紙筆,向你們說我愛你們,感謝你們辛苦的栽培;爸、媽,
謝謝你們!我親愛的女友,將近八年了,謝謝妳願意一直守候在我的身邊,不管是在我當兵 的時候、心情低落的時候都願意鼓勵我,謝謝妳!207 研究室的各位學長、同學及學弟謝謝 你們兩年來的幫忙,尤其是王得貴學長跟陳佑政學長,謝謝你們。
i
中文摘要
IEEE1588 標準係一高精度時間同步協定(PTP),其主要設計用於分散式聯網系 統各節點之即時時間同步。在子網中,PTP 系統預期可達次微秒(<10-6秒)時間同步 性能。因此,PTP 系統可應用於傳統量測與控制系統、工業自動化、通訊系統、
電力系統及眾多現代技術領域。
時間伺服器(Clock servo)在 PTP 系統中扮演重要的角色。通常時間伺服器是利 用比例積分(PI)控制器來實現。主時鐘(Master clock)及從時鐘(Slave clock)之時間偏 差則回授至PI 控制器,參考 PI 控制器之輸出,可調整從時鐘同步於主時鐘,且相 對計時速率(Relative tick-rate)因此可趨於穩定。為增進 PI 控制器之性能,本研究
採用灰色理論求得 PI 控制器中比例項之參數。從時鐘相對於主時鐘之時間偏移
(Drift),可由灰色預測演算法求得。因此,灰色 PI 控制器可縮短暫態響應時間,
使系統更快趨於穩定。為了評估系統性能,本研究結合了 PTP 軟體及網路介面,
建立一個子網路系統。且本論文採用ITU-T 推薦之亞倫方差進行系統穩定度分析。
結果顯示,灰色PI 控制器性能優於傳統 PI 控制器,引用灰色 PI 控制器,可大幅 縮短系統暫態響應時間。
.
ii
Abstract
IEEE1588 standard is a precision time synchronization protocol (PTP). It is designed to synchronize real-time clocks in the nodes of a distributed system that communicate using a network. Within a subnet, the PTP system is expected to achieve the synchronization accuracy in sub-microsecond range. Thus, it is applicable to traditional measurement and control systems, industrial automation systems, communication systems, electrical power systems and many other areas of modern technology.
The unit of clock servo plays important roles in the PTP system. It is usually implemented by proportional integral (PI) controller. The time offsets between the master and the slave clock are fed into the PI controller. The output of the PI controller is used to steer the slave clock to synchronize with the master clock. Therefore, the relative tick-rate of the slave clock can be stabilized. In order to improve the performance of the PI controller, this study adopts the gray theory to determine the parameter of the proportional term of the PI controller. The drift of the time offset from master clock can be obtained by using the gray prediction algorithm. Accordingly, the gray PI controller makes the system reduce the time to reach steady state. To assess the performance of the system, this study integrates the PTP software and the network interface with timestamper to establish a subnet. For the stability analysis of the system under tests, this paper utilizes the ITU-T recommended Allan deviation. Experimental results show that the performance of the gray PI controller is better than the traditional one. The transient response time of the system is significantly reduced by introducing the proposed gray PI controller.
iii
目錄
中文摘要 ...i
Abstract ... ii
目錄 ... iii
圖目錄 ... v
表目錄 ... vii
第1 章 緒論 ... 1
1.1 研究背景 ... 1
1.2 研究方向 ... 1
1.3 論文架構 ... 1
第2 章 時間與頻率概論 ... 3
2.1 振盪器及其頻率標準 ... 3
2.1.1 石英振盪器 ... 3
2.1.2 原子振盪器 ... 5
2.2 時頻量測 ... 8
2.3 頻率性能指標 ... 10
2.3.1 頻率性能的衡定 ... 10
2.3.2 時間訊號的數學模型 ... 10
2.3.3 頻率準確度 ... 14
2.3.4 頻率穩定度 ... 15
第3 章 IEEE 1588 標準概論 ... 21
3.1 IEEE 1588 標準同步原理 ... 21
3.1.1 延遲時間與時間補償 ... 23
3.1.2 協定中重要的假設 ... 24
3.2 精確時間同步協定(PTP)系統 ... 28
3.3 PTP 狀態及狀態機 ... 29
3.4 單一主時鐘與從時鐘 ... 33
第4 章 精確時間同步協定程式 ... 35
iv
4.1 精確時間同步協定軟體 ... 35
4.1.1 硬體限制 ... 36
4.1.2 軟體限制 ... 36
4.2 時鐘伺服(Clock servo) ... 37
4.2.1 設計上的限制 ... 37
4.2.2 比例積分控制器 ... 37
4.2.3 灰色比例積分控制器 ... 38
4.3 灰色預測 ... 39
4.3.1 累加生成(Accumulated generating operation; AGO) ... 40
4.3.2 建立一階灰微分方程模型 ... 40
4.3.3 以最小平方法解a、b ... 41
4.3.4 白化響應式 ... 42
4.4 調整參數 ... 43
第5 章 實驗結果與數據 ... 45
5.1 網路拓樸類型 ... 45
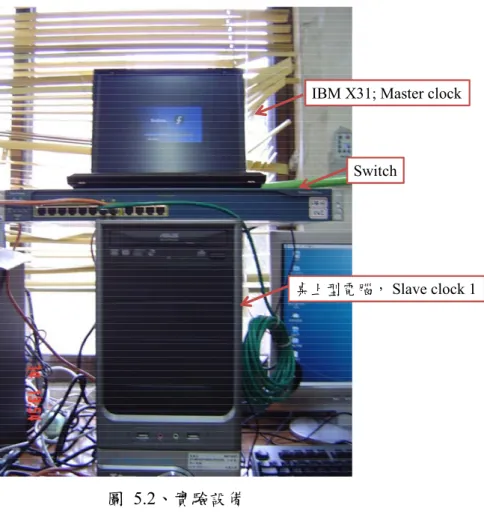
5.2 實驗設備 ... 46
5.3 實驗結果及分析 ... 47
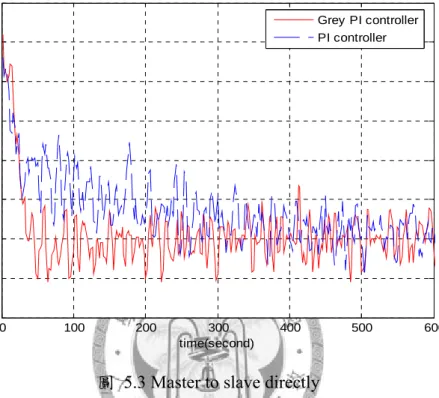
5.3.1 實驗一 Master to slave directly ... 47
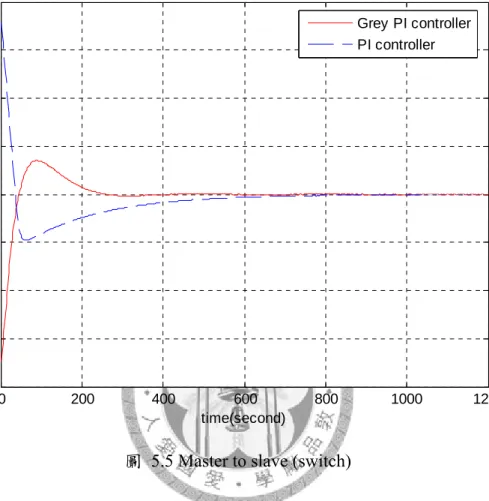
5.3.2 實驗二 Master to slave (switch) ... 48
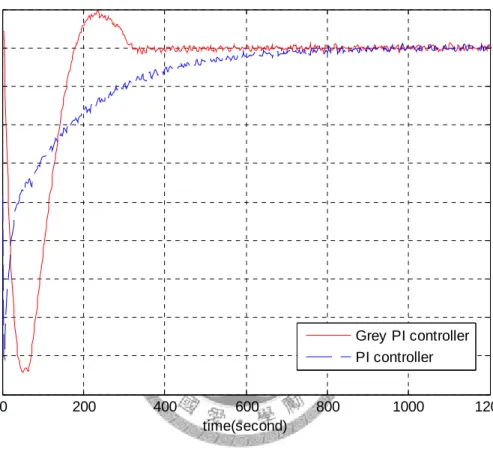
5.3.3 實驗三 Master to two slaves (switch) ... 52
5.3.4 討論 ... 55
第6 章 結論與未來展望 ... 61
6.1 結論 ... 61
6.2 未來展望 ... 61
參考文獻 ... 63
v
圖目錄
圖 2.1、壓電振盪子等效電路[7] ... 4
圖 2.2、石英振盪器基本電路[7] ... 4
圖 2.3、各種典型頻率標準之穩定度分布[7] ... 7
圖 2.4、直接相位量測時序示意圖[10] ... 8
圖 2.5 、 1PPS 直接相位量測時序示意圖 ... 9
圖 2.6 、頻率直接量測時序示意圖[10] ... 10
圖 2.7、雜訊型態與 斜率示意圖[1] ... 16
圖 2.8、雜訊型態與斜率示意圖[1] ... 18
圖 2.9、雜訊型態與斜率示意圖[1] ... 19
圖 3.1 、IEEE1588 標準取得時間補償 ... 21
圖 3.2、等待時間常數的定義 ... 26
圖 3.3、同步時鐘系統 ... 28
圖 3.4、協定引擎狀態機[6] ... 30
圖 3.5、主時鐘狀態流程 ... 33
圖 3.6、從時鐘狀態流程 ... 34
圖 4.1、軟體精確同步時間協定之架構[9] ... 35
圖 4.2、軟體精確時間協定之 Servo 架構[8] ... 38
圖 4.3、比例積分控制器與系統之閉迴路 ... 38
圖 4.4、灰色預測流程圖 ... 39
圖 5.1、網路拓樸類型 ... 45
圖 5.2、實驗設備 ... 46
圖 5.3 Master to slave directly ... 47
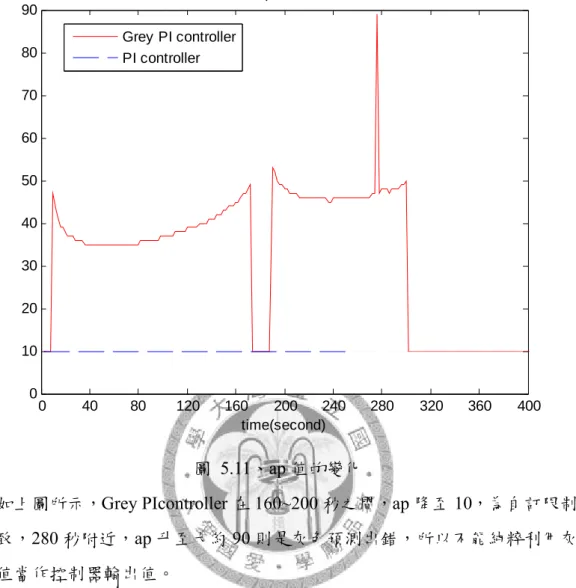
圖 5.4、ap 值的變化 ... 47
圖 5.5 Master to slave (switch) ... 48
圖 5.6 、穩態相對計時速率比較圖 ... 49
圖 5.7、不同 ap 值在穩態時之亞倫方差 ... 50
圖 5.8、ap 值的變化 ... 51
vi
圖 5.9 Master to two slaves (switch) ... 52
圖 5.10、穩態相對計時速率比較圖 ... 53
圖 5.11、ap 值的變化 ... 54
圖 5.12、不同比例項參數之比例積分控制器(1) ... 55
圖 5.13、GPI 與較佳的 PI ... 55
圖 5.14、四點取樣求得預測值 ... 56
圖 5.15、五點取樣求得預測值 ... 57
圖 5.16、八點取樣求得預測值 ... 57
圖 5.17、原序列不加絕對值,八點取樣求得預測值 ... 58
圖 5.18、暫態與穩態均利用灰色預測調整 ap 參數 ... 59
圖 5.19、相對計時速率 ... 59
圖 5.20、暫態與穩態均利用灰色預測調整 ap 參數 ... 60
vii
表目錄
表 2.1、各類頻率標準對環境因素的敏感度[7] ... 7
表 2.2、雜訊型態與 斜率對應表[1] ... 16
表 2.3、雜訊型態與斜率對應表[1] ... 17
表 2.4、雜訊型態與斜率對應表[1] ... 19
表 3.1、時間間隔參數 ... 22
表 3.2、時間刻度參數 ... 22
表 3.3、時鐘階層的定義 ... 24
表 3.4、時鐘辨識的定義 ... 25
表 3.5、PTP 狀態列表 ... 29
表 3.6、狀態機上的事件 ... 32
viii
1
第1章 緒論
1.1 研究背景
近年來,隨網路科技的蓬勃發展,傳統系統均快速網路化,資訊交換量則與 日俱增,對頻寬、精確計算、可靠度、穩定度及安全性等要求更為嚴苛,其中時 頻同步性能扮演著關鍵角色。IEEE 1588 標準係一全新之高精度時間同協定,自 2002 年制訂後,讓聯網系統達成次微秒時間同步成為可能,因而國外眾研究單位 及知名公司均積極投入研究與產品開發。反觀國內,至今相關研究鮮少見到,為
掌握商機,積極投入研究與應用系統開發則刻不容緩。為實現 PTP,必需具備控
制、資訊、網路、IC 設計及嵌入式系統等學門之專業知識,依據所採用之控制法 則、作業系統、網路結構、IC 晶片及整合方式之不同,其性能表現亦迥然不同。
由於各種應用設計之差異甚鉅,因此,PTP 不但應用至為廣泛,其諸多特點亦極 具學術研究價值。
1.2 研究方向
本論文將利用一套 PTP 軟體經由灰色預測來調節比例積分控制器的參數,藉
此加快到達穩態,強化控制器之效能,預期可達微秒(10-6秒)時間同步性能,經由 軟體實現以及軟體效能的改善可以將成果應用於更廣的領域,如電信網路、量測 系統、電力系統、通訊網路、控制系統、汽車工業、航太工業及軍事領域等。
1.3 論文架構
本論文之架構共分為六章,茲將要點分述於後:
第一章 緒論
簡述本論文之研究背景和方向-經由灰色預測來調節控制器參數,使 PTP 系統 控制器之效能得到強化,以及論文的架構。
第二章 時間與頻率概論
本章首先介紹時間與頻率的沿革,並且對一些振盪器,例如石英振盪器、銣
2
原子振盪器、銫原子振盪器和氫微射原子振盪器作介紹。緊接著對時頻的量測方 法、頻率性能的衡定,如精確度、穩定度,時間信號的數學模型以及亞倫方差、
修正型亞倫方差及時間方差作介紹。
第三章 IEEE 1588 標準概論
本章先對時間同步原理作介紹,提及協定中所需要的假設,及所謂的時鐘階
層、時鐘辨識、內部與外部的等待時間等,再來就是 PTP 的系統架構,普通時鐘
與邊界時鐘的連結以及UUID(Universally unique identifier),最後說明 PTP 狀態機,
針對運行中的協定會有哪些狀態、甚麼事件引起狀態間的改變,以單一主時鐘與 從時鐘說明其狀態機。
第四章 精確時間同步協定程式
本章首先對軟體實現 IEEE1588 標準作介紹,說明其工作環境、限制與控制器,
最後將希望修改的部分-灰色比例積分控制器及灰色預測流程作出說明,並指出在 程式中如何將灰色預測值加入並對比例參數作出調整。
第五章 實驗結果與數據
本章先說明實驗時的網路拓樸:Master to slave directly, Master to slave (switch), Master to two slaves (switch)。接著呈現實驗分析數據及結果,實驗結果顯示,使用 灰色比例積分器確實可以縮短暫態時間,穩態時,若為了讓相對計時速率穩定,
則會使時間補償穩定度降低,子網路中的網路成員個數增加,會使同步效能降低。
第六章 結論與未來展望
在結論中指出利用灰色預測確實可以使比例積分控制器的效能提升,但是比 例積分控制器仍然有缺點:穩態時間補償的抖動現象,即相對計時速率不穩定。
原因為調節振盪器電壓和環境溫度的改變。未來展望中指出,期望將來可以進一 步利用狀態回授控制器來取代穩態時的比例積分控制器。
3
第2章 時間與頻率概論
時間,在人類的生活中佔有很重要的位置,隨著時代的進步,時間的計量亦 趨精微,由時、分、秒,直到今時今日的科技發展而關注至毫秒(10-3秒)、微秒(10-6 秒)、甚至於奈秒(10-9秒)等,也因此為國際單位制七項基本物理量之一。
石英震盪器為第一個頻率和時間的計量標準,也因為石英震盪器使得電子科 技更加進步。直至1948-1949 年,第一個原子鐘於國家標準局問世,對於時間的發 展與應用出現了新的氣象。自此,用於科學上的時間與頻率更趨精準使得在時頻 領域範圍內原本無法解釋的科學現象因此得到突破。
由於時間與頻率的標準在科技不斷的進步下,使得時頻的精確度大幅提高,
對於時間同步以及量測科學上有著極大的助益,至此,期望獲得的就是穩定的時 間使得精準的時頻標準能有更好的應用。對於如何獲得穩定的時間,正我們所知,
不論是石英振盪器或是原子振盪器,其原理皆是利用週期性的振盪現象來計數時 間。換句話說,若我們欲量測時間的穩定度及精確度,可以藉由頻率與時間的關 係來著手。
2.1 振盪器及其頻率標準
在眾多振盪器中,我們可將常見的振盪器分為兩類:一類為石英振盪器(Quartz oscillators)、一類為原子振盪器(Atomic oscillators)。關於石英振盪器,其應用非常 普遍。至於原子振盪器,一般常見有銣原子振盪器(Rubidium oscillators)、銫原子 振盪器(Cesium oscillators)以及氫微射原子振盪器(Hydrogen masers)。關於上述的振 盪器敘述如下:
2.1.1 石英振盪器
1880 年,P.Curie 發現壓電效應,且在 1907 年 Lee de Forest 發明了電子放大器 使石英振盪器得以在1920 年問世。石英振盪器於 1920 至 1930 年間,廣泛應用於 通訊以及時間與頻率度量衡實驗室,其核心為石英晶體(Quartz crystal),石英晶體 本身為一種機械共振器(Mechanical resonator),由於切割方式、幾何形狀及尺寸相
4
異,使得沒有任何二個石英晶體的振盪頻率是相同的。利用壓電效應(Piezoelectric effect)使石英晶體和電子電路結合而成頻率振盪器。圖 2.1 顯示壓電振盪子的等效 電路通常應用於時頻度量衡領域的頻率範圍介於5 到 10MHz,其他領域的應用最 高可達1GHz。而一般石英振盪器的基本電路如圖 2.2 所示,CL1為固定電容,CL2
為可隨外部直流電壓調變的可變電容,CL1與 CL2的並聯即為上圖之 CL,藉由 CL
的調動可調整振盪頻率。
圖 2.1、壓電振盪子等效電路[7]
圖 2.2、石英振盪器基本電路[7]
環境對於石英振盪器所造成的影響相當敏感這些因素包括溫度、溼度及震動 等,尤其以溫度的影響最直接。所以振盪器的輸出頻率相對於標稱值極易隨環境 因素的改變而造成偏移現象,即。因此發展出了不同類型的石英晶體振盪器,大 致上可分為:普通晶體振盪器(Simple-packaged crystal oscillator, SPXO)、爐溫控制 型石英振盪器(Oven-controlled crystal oscillator, OCXO)、溫度補償型石英振盪器 (Temperature-compensated crystal oscillator, TCXO)以及微處理機補償型石英振盪器
5
(Microprocessor-compensated crystal oscillator, MCXO)等四種石英晶體振盪器,其中 以爐溫控制型石英振盪器效能最佳,其頻率準確度一天約為1×10-7至1×10-9,若經 由外部控制與調整則其精度可到達 10-12等級。因此,大部分原子鐘的輸出頻率單 元皆由石英振盪器擔任。
除了環境因素外,對振盪器造成影響的還有所謂系統的改變-老化(Aging)。老 化為近似線性的變化,可以使得頻率增加或是減少。而在諸多振盪器中,石英振 盪器的老化現象最嚴重,優良的石英振盪器,老化率不超過5×10-9/年。
2.1.2 原子振盪器
根據量子力學,每個原子都有其離散值;利用電磁場推動一個原子由低能階 進入高能階,或藉由放射電磁能由高能階降至低能階。藉由能階間的躍升或是下 降而產生能量差除以蒲朗克常數可得原子振盪器的振盪頻率(Resonance frequency)。
可表示為
2 1
E E
f h
= −
(2.1)
其中
f
代表共振頻率; 2E
、 1E
為量子能階且;h
為蒲朗克常數(Planck’s constants)。所有原子振盪器皆為固有標準(Intrinsic standards),即其頻率決定於原子本身 的性質。為了得到良好的穩定性能,可以利用石英振盪器短期良好的穩定性,混 合原子振盪器固有的頻率標準,即以石英振盪器頻率相鎖原子共振頻率,利用優 良的石英振盪器來當作頻率輸出單元。如此,可以達到所希望的目的,使得原子 振盪器長期穩定度優於石英振盪器。以下分述三種原子振盪器皆是利用石英振盪 器做為其頻率輸出單元:
6
1.銣原子振盪器
目前最廉價的原子振盪器,約$3,000 至$8,000 元。若考慮成本性能比,首推 銣原子振盪器,其性能優於石英振盪器,價格遠低於銫原子鐘。基於銣原子共振 頻率6,834,682,608Hz,常與較低的石英振盪頻率(5MHz)混合。銣原子振盪器的輸 出單元是由石英振盪器擔任,輸出頻率由銣原子頻率訓練與調整。通常銣原子振 盪器一天之頻率準確度約介於 10-10至 10-12 等級,若加以適當的維護可以保持在 10-11等級,穩定度約10-11至10-12等級。若是給予更好的維護,其性能將有機會接 近一般品質的銫原子鐘。
2.銫原子振盪器
傳統銫原子鐘是藉由銫原子與微波相互作用形成共振吸收,以探測銫原子躍 遷能量所對應的頻率而實現秒定義之目的。目前國際上公認的原級頻率標準,SI 秒(SI second)即源於銫原子(133Cs)原子基態的兩個超精細能量級間躍遷輻射振蕩 91,92,631,770 周所持續的時間。而世界協調時(Coordinated universal time, UTC)就 是由全球多個銫原子鐘的平均秒長結合世界時(UT1)而得。它的準確度,一般來說,
在預熱後約為 10-13 等級,穩定度在一天內約可達 10-14 等級,價格約$30,000 至
$80,000 元。
3.氫微射原子振盪器
目前商用原子振盪器中最昂貴者,基於氫原子的共振頻率 1,420,405,752Hz,
其建構及維護費用相當高。可分主動式(Active maser)與被動式(Passive maser),主 動式氫微射原子振盪器之輸出頻率較為直接來自於原子共振,故短期穩定度優於 被動式。氫微射原子鐘亦利用石英振盪頻率相鎖原子振盪頻率而成為最終之頻率 輸出,氫微射原子振盪器的準確度在約 10-13等級,穩定度在不足一天的時間內可 達約10-15等級。
如圖 2.3 為各類型振盪器典型之頻率穩定度分布圖。高品質的石英振盪器,短 期的穩定度相當高,此即為大多數原子振盪器輸出單元接採用之的原因。但是由 於石英振盪器對環境因素相當敏感,而且老化速度快,因此性能隨著量測時間增 加而快速下降。在所有商用原子鐘裡,短期效能雖然以氫微射原子鐘較佳,但其
長期 標準
表 2 頻率
類 爐溫 石英 氫微 振 銫 振 銣 振
期準確度卻比 準。關於各類
2.1、各類頻 率標準 類型 溫控制型 英振盪器 微射原子 振盪器 銫原子 振盪器 銣原子 振盪器
比高性能的 類型振盪器
圖 2.3
頻率標準對環 溫度 (per K)
10-12s
10-14s
≦1×10-15
10-12s
的銫原子鐘差 器對環境因素
3、各種典型
環境因素的 加速 (per
10
10
5s 10
10
7
差,且價格 素的影響如
型頻率標準
的敏感度[7]
速度
m/s2) (p 0-11s
0-14s
0-14s ≦
0-13s
格昂貴,所 如表2.1 所示
準之穩定度分
] 磁場 per Tesla)
10-10s
10-10s
≦1×10-14s
10-13s
所以未被考慮 示。
分布[7]
氣壓 (per Pasca
10-12s
10-12s
≦1×10-15
10-15s
慮當作原級
al)
老化 (per y
10-
10-1
5s < 2×1
10-1 級頻率
化 year)
8s
12s
0-14s
10s
2.2
相位 接量 1. 直 對,
相位 零交 level 位設 正零 率週
方式 得兩
時頻量
想要量測時 位直接量測(
量測(Direct m 直接相位量測 利用時間間 其中一為待 位量測的正弦 交越(Positive
l)為基準,因 設定範圍在 零交越,為計 週期
τ 0
,可此外,亦可 式產生1PPS 兩信號的時間
量測
時頻源,我 Direct mea measuremen 測
間隔計數器 待測頻率(D 弦信號時序 e going ze 因為考慮實 0.1~0.3 伏特 計時之終點 可獲得兩頻率
圖
可利用時間 S 信號,分別
間差Δ 。如
τ
我們可以由兩 asurements o
nts of freque
器(Time inter Device unde 序示意圖,一
ero crossing 實際的信號
特不等稱之 點,因而求得
率的相位差
2.4、直接相
間間隔計數器 別為時間間 如圖2.5 所示
8
兩方面著手 of time(pha ency)來對時
rval counter er test, DUT 一般來說,正
g) ,即根據 號源在零伏特
之,為計時觸 得量測時間 差Δ = Δ
ϕ τ τ
/相位量測時
器,令待測 間隔計數器的
示。
手,一方面 ase)),另一 時頻源做量
r, TIC)直接 T);另一為參
正弦信號以 據量測者所 特附近的雜
觸發起點,
間差
Δ τ
, 0 (2 )rad τ
⋅π
時序示意圖
測頻率及參考 的計時啟動
面是由相位 一方面是頻率 量測。
接對兩個頻率 參考頻率。以 以待測頻率
所設定的觸 雜訊較大,通
,以參考頻率 再將此時間
d 。
[10]
考頻率以除 動信號和停止
,可以利用 率,利用頻
率源的相位 以圖2.4 為 (DUT)信號 觸發準位(Tr 通常會將觸 率(Referen 間差除以參
除頻或者計數 止信號,進
用時間 頻率直
位做比 為直接 號的正 rigger 觸發準
ce)的 參考頻
數的 進而求
9 高頻的時間間隔計數器
(參考時頻源) 利用除頻或計數方式使弦 波時頻源轉為每秒一個脈
衝訊號
(待測時頻源) 利用除頻或計數方式使弦 波時頻源轉為每秒一個脈
衝訊號 輸入脈衝訊號後啟動
輸入脈衝訊號後停止
τ Δ
圖 2.5 、 1PPS 直接相位量測時序示意圖
以理想的時間軸 t 為參考,則Δ 為 t 的函數,亦即
τ
Δ 可表示為τ
Δ (t)。在分τ
析頻率信號的性能時,常用到誤差函數 x(t)當作分析的基礎,而Δ (t)可作為 x(t)τ
的量測量,若量測區間在[t,t+τ
],那麼此區間的頻率偏差量(Frequency offset),或 稱之為頻率準確度(Frequency accuracy)可表示為
( ) ( )
x t x t
y
τ ττ
= + −
(2.2)
2. 直接頻率量測
如圖 2.6 所示,利用參考頻率作為時間間隔計數器的基頻,在一段時間間隔內 計數待測頻率正零交越的個數來獲得待測件之頻率。頻率偏差值為
y
τ =(f
−f
0) /f
0 (2.3)f
表示為從時間間隔計數器讀取之待測件頻率,f 則為參考頻率,
0τ
為計數間隔。2.3
2.3.
參考 (Freq (Cov
2.3.2
我們
其中
V :
0f :
0( ) t
ε( ) t
φ頻率性
1 頻率性
衡定頻率性 考頻率的程度quency stab variance)之值
2 時間訊
們可將振盪器
中
頻率訊號標 頻率訊號標
:振幅調變
:相位調變
圖 2
性能指標
性能的衡定
性能可以由度,即頻率 bility),表示 值的大小。
訊號的數學
器的頻率輸
標稱(Nomin 標稱頻率;
變(Amplitud 變(Phase mo
2.6 、頻率
標
定
由:頻率準確 率訊號均值 示振盪器頻
學模型
輸出電壓之瞬( ) ( 0
V t
=V
nal)振幅;
de modulatio odulation, P
10
率直接量測時
確度(Freque 值(Mean)與參 頻率受雜訊之
瞬間值表示
( ))sin((
t ε
+
on, AM)雜訊 PM)雜訊;
時序示意圖
ency accura 參考頻率均 之影響而隨
示為
(2
π f
0+φ
( )t
訊;
圖[10]
acy),表示振 均值之差異 隨機起伏的程
))
振盪器頻率 異;頻率穩 程度,即共
率偏離 穩定度 共變數
(2.4)
11
瞬時相位為
(2.5)
瞬時頻率為
0
1 ( ) ( )
( ) 2 2
d t t
f t f
dt
φ
π π
= ⋅ Φ = + &
(2.6)
瞬時頻率相對於標稱頻率的偏差值為
0
0 0
( ) ( )
( ) 2
f t f t
y t f f
φ π
= − = &
(2.7)
因為時間是連續性的,所以我們無法直接量測某一瞬間的頻率,所以只能針 對某一時間間隔
τ
進行量測來取得平均頻率,若取樣區間在[tk,tk+τ
],則平均頻率 偏差值為
1
k( )
k
t
y
τ t τy t dt
τ= ∫ + (2.8) 由(2.7)式、(2.8)式可得
0 0
0 0
( )
1 ( )
1 1 ( ( ) )
k k
k k
t t
t t
f t f
y dt
f
f t dt f f
τ τ
τ
τ τ
+
+
= −
= −
∫
∫
(2.9) ( ) 2t π f
0φ
( )t
Φ = +
12
令取樣時間
τ
內的平均頻率偏差量中
1
k( )
k
t
f
τ t τf t dt
τ= ∫ + (2.10) 由(2.9)式和(2.10)式可得
0 0
f f
y f
τ
=
τ−
(2.11)
(2.11)式中, fτ為取樣時間
τ
內之平均頻率,在實際量測中,τ
為時間間隔計數器 的閘門時間(Gate time), fτ則為時間間隔計數器之讀數[10]。由(2.11)式可知
( ) ( )
( ) ( ( ) ( ) )
( ) ( )
{ }
0
0
0 0
0 0
0
0
1 ( )
1 1
2
1 2
k k
t t
k k k k
k k
f f
y f t f dt
f f
t t t t
f
t t
f
τ τ
τ τ
τ τ
τ π π τ τ
−
+= = −
⋅
⎧ ⎡ ⎤ ⎫
= ⋅ ⎩ ⎨ ⎣ Φ + − Φ + − Φ − Φ ⎦ ⎬ ⎭
= ΔΦ + − ΔΦ
⋅ ⋅
∫
(2.12)
由(2.12)式可知,欲量測頻率,可由頻率或相位兩方面著手。
在(2.4)式中,由於我們在此只討論振盪器頻率的品質,所以將ε 忽略不計。故振
( ) t
盪器的輸出電壓可表示為
V t
( )=V
0sin(2π f t
0 +φ
( ))t
(2.13)在實際量測上,我們假設時間訊號為以正弦波周而復始變化的電壓值
V t ( )
。 所以我們可以(2.13)式中的相位表示為時間訊號相位Φ ( ) t
,即13
Φ =( ) 2
t π f t
0 +φ
( )t
(2.14)在(2.14)式中,φ 不為一個單純的函數,即週期不固定,故將
( ) t
φ 分成四個( ) t
部分:常數、一次式、二次式以及隨機變數。φ
( ) t = Φ +
0 α1t +
α2t
2+
ϕ( ) t
(2.15)其中
Φ :初始相位偏移量; 0
α
1:相對於標稱頻率f 之頻率偏移量;
0α :頻率漂移率(表示振盪器之老化率); 2
( ) t
ϕ :隨機變數;
所以在(2.14)式可利用(2.15)式代替成一個更符合實際情形的時間信號模型:
Φ = Φ + ( ) t
0(2
πf
0+
α1) t +
α2t
2+
ϕ( ) t
(2.16)若以(2.16)式代表待測件(Device under test, DUT)振盪器的時間訊號模型,則參 考振盪器的時間訊號模型可以表示為
Φref( ) (2
t
=π f
0+α
1ref)t
+α
2reft
2 +ϕ
ref( )t
(2.17)由於是參考訊號,其初始相位偏差量Φ 為零。因此,我們可以利用(2.16)式、0 (2.17)式將誤差函數
x t ( )
表示出來;誤差函數是經過正規化(Normalized)後的待測件 時間與參考件時間的差,即14
0
1 1 2 2 2
0
0 0 0
( ) ( ) ( ) 2
( ) ( ) ( )
2 2 2
ref
ref ref ref
t t
x t f
t t
x t t
f f f
π
α α α α ϕ ϕ
π π π
Φ − Φ
=
− − −
= + + +
(2.18)
其中 0 0
2
0x
πf
= Φ
為初始誤差值。若參考振盪器的品質遠優於待測振盪器,即α1ref
<<
α α1; ;
2ref<<
α ϕ2 ref( ) t <<
ϕ( ) t
則 (2.18)式可化簡為
1 2 2
0
0 0 0
( ) ( )
2 2 2
x t x t t t
f f f
α α ϕ
π π π
= + + +
(2.19)
利用鎖相迴路,待測時頻源相鎖參考源,使得α1ref
=
α α1;
2=
α2ref,(2.18)式可為0 0 ( ) ( )
( ) 2
t
reft x t x
f
ϕ ϕ
π
= + −
(2.20)
2.3.3 頻率準確度
對於頻率穩定度的評定就如(2.11)式所述,若將振盪頻率以振盪週期的型式表 示出來,即
f 1
= T
,則(2.11)式可寫成
0 0
T T
y T
≅ −
(2.21)
這意味著,當我們求得頻率準確度,可以同時得知振盪器實際頻率以及振盪 器實際週期偏離標稱值的程度。
15
2.3.4 頻率穩定度
一般來說,各種頻率標準的輸出頻率皆包含主要五種類型的雜訊,此五種雜 訊分別為白色調相雜訊(White PM)、閃爍調相雜訊(Flicker PM)、白色調頻雜訊 (White FM)、閃爍調頻雜訊(Flicker FM)以及隨機游動調頻雜訊(Random walk FM)。
在這些雜訊下,輸出頻率將造成相位及振幅的隨機變化,而頻率穩定度就是用來 描述振盪器頻率因雜訊的影響而變化起伏的程度。
關於時頻穩定度的評估方法中,最常用的三種指標分別為亞倫方差(Allan deviation, ADVE(
τ
))、修正型亞倫方差(Modified Allan deviation, MDEV(τ
))及時間 方差(Time deviation, TDEV(τ
))敘述如下:以下敘述中,
x t ( )
表示為時間誤差函數,其中 t 為連續變數。但是對實際量測 而言,僅能以離散方式表現,即{ x
i =x i
( ), 1,τ
0i
= 2, ...,N }
表示x t ( )
的 N 個序列,其中
τ
0表示離散取樣週期,量測時間間隔則為τ
=n τ
0。1. 亞倫方差(ADVE(
τ
))2
[ ]
2( ) ( ) 1 ( 2 ) 2 ( ) ( )
y 2
ADEV τ σ τ x t τ x t τ x t
= =
τ
+ − + +(2.22)
其中< >表示無限時間之平均。
頻率觀點的計算公式近似為
1 2
1 1
( ) 1 ( ) ; 2( 1)
M
i i
y i i i
i
x x
y y y
M σ τ
ττ
− +
= +
≅ − = −
−
∑
(2.23)
相位
位觀點的計算
有關各類型
算公式可近
y( )
σ τ
≅型雜訊所對
表
近似為
2
1 2 (N
τ
≅ −
對應σ τ 斜y
( )
表 2.2、雜訊 Noise pro WPM FPM WFM
FFM RWFM
圖 2.7、雜
16
2
1
2 ) (
N n
i i
n x
−
−
∑
=斜率如表2.2
訊型態與 斜
ocess S M
M M M
M
雜訊型態與
2 2
i+ n −
x
i n+ +2 所示;斜
斜率對應表 Slope of 與 τ−1
τ−1 12
τ
− τ0 12τ
與 斜率示意 )2
x
i+
斜率示意圖如
[1]
與 σ τy
( )
意圖[1]
(
如圖2.7 所示 (2.24)
示。
17
2. 修正型亞倫方差(MDEV(
τ
))
2 2 2
1
1 1
( ) ( 2 )
2
n
y i n i n i
i
Mod x x x
σ τ
n
τ = + +
⎡ ⎤
= ⎢ ⎣ ∑ − + ⎥ ⎦
(2.25)
頻率觀點之計算公式可近似為
1 2
3 1 1
1
( ) 1 ( )
2 ( 3 1)
M n j n i n
y k n k
j i j k i
Mod y y
n M n
σ τ
− + + − + − += = =
⎧ ⎡ ⎤⎫
≅ − +
∑ ∑ ∑
⎨⎩ ⎢⎣ − ⎥⎦⎬⎭
(2.26)
相位觀點之計算公式可近似為
1 2 3 1 2 2 2
1
( ) 1 ( 2 )
2 ( 3 1)
N n n j
y i n i n i
j i j
Mod x x x
n N n
σ τ τ
− + + −
+ +
= =
⎡ ⎤
= ⎢ − + ⎥
− +
∑ ∑
⎣ ⎦
(2.27)
有關各類型雜訊所對應σ τ 斜率如表 2.3 與圖 2.8 所示。 y
( )
表 2.3、雜訊型態與斜率對應表[1]
Noise process Slope of 與 σ τy
( )
WPM τ−3 2FPM τ−1
WFM
τ
−12FFM τ 0
RWFM
τ
123. 時 式比
時間方差(TD 用於衡定時 比較,可發現
DEV(
τ
)) 時間之穩定 現時間方差
x
(
σ τ
σ τ
x(圖 2.8、雜
定度,在時間 差可由修正型
2
) 1
τ= 6n
2
)
τ
3Mo τ
=18
雜訊型態與
間傳送與同 型亞倫方差
2 1
2
n i n i
x
+=
⎡ −
⎢⎣ ∑
y( )
od σ τ
與斜率示意圖
同步方面常被 差求得如(2.2
2
2 x
i n+x
i⎤ + ⎥ ⎦
圖[1]
被使用如(2.
29)式。
.28)式;與(
(
( (2.25)
(2.28)
(2.29)
有關
而修 亞倫
關各類型雜訊
至於三種指 修正型亞倫方 倫方差為目前
訊所對應σy
表 2.4 N
圖
指標的差別 方差與時間 前最常被用
y
( )
τ 斜率如4、雜訊型態 oise proces
WPM FPM WFM
FFM RWFM
圖 2.9、雜訊
別就是在於亞 間方差都能在 用來評估振盪
19
如表2.4 與圖
態與斜率對 s Slope
訊型態與斜
亞倫方差對 在WPM 與 盪器穩定度
圖2.9 所示
對應表[1]
e of 與
σ
x τ−1 2τ 0 12
τ
τ 132
τ
斜率示意圖[
對WPM 與 F 與FPM 的斜 度之指標。
。
( )
τ
[1]
FPM 的斜率 斜率做出分辨
率無法做出分 辨。因此修
分辨,
修正型
20
21
第3章 IEEE 1588 標準概論
在過去,談到時間的同步,我們所能想到的不外乎就是 NTP(Network time protocol),其準確度約可達毫秒(Milliseconds, 10-3 seconds)。但是在量測與控制系統 領域中,隨著科技的發達,所需要的時間準確度越來越高,於是IEEE 1588 標準因 此應運而生。它可以運用在區域性的電腦網路通訊和分散式的聯網系統。在區域 性的電腦網路中,IEEE 1588 標準支援信息多點廣播而且並不限定只是在乙太網路 中;同時也可以使不同的準確度、解析度以及穩定度的異類系統的時間得以同步,
其在區域網路同步的能力可以達到次微秒(Submicroseconds, < 10-6 seconds)等級。
3.1 IEEE 1588 標準同步原理
IEEE 1588 標準的同步原理,我們可以利用下圖來做說明。
Master clock 10:00:00(Tm1)
Slave clock 10:05:00 (Tm1+O)
Master clock 10:00:15 (Ts2-O)
Slave clock 10:05:10 (Ts1)
Slave clock 10:05:11
Master clock 10:00:25(Tm2)
Master clock 10:00:26
Slave clock 10:05:36
Ds-2-m
Slave clock 10:05:15(Ts2) Master clock
10:00:01
Dm-2-s
Ts1=Tm1+O +Dm-2-s
Tm2=Ts2- O+Ds-2-m
Processing Sync
Processing Delay Request
圖 3.1 、IEEE1588 標準取得時間補償
如圖 3.1 所示,以兩個時鐘,主時鐘(Master clock)和從時鐘(Slave clock)作說 明:
22
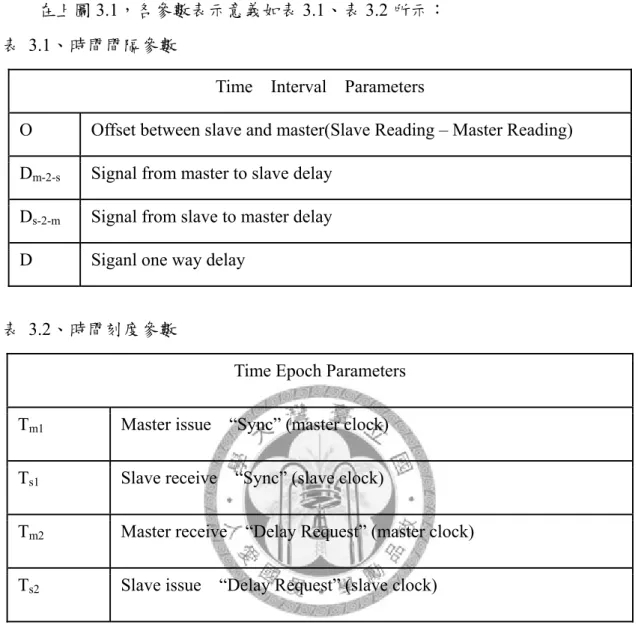
在上圖 3.1,各參數表示意義如表 3.1、表 3.2 所示:
表 3.1、時間間隔參數
Time Interval Parameters
O Offset between slave and master(Slave Reading – Master Reading) Dm-2-s Signal from master to slave delay
Ds-2-m Signal from slave to master delay D Siganl one way delay
表 3.2、時間刻度參數
Time Epoch Parameters Tm1 Master issue “Sync” (master clock) Ts1 Slave receive “Sync” (slave clock)
Tm2 Master receive “Delay Request” (master clock) Ts2 Slave issue “Delay Request” (slave clock)
開始時,兩時鐘之一,宣布為主時鐘,此時會送出同步信息(Sync message)給 從時鐘,此信息為一個原始時戳,即 Tm1 ;同步信息送出後,主時鐘會將描述精 確原始時戳的資料包含在後續信息(Follow-Up message)內,在同步信息送出後,跟 著送至從時鐘;從時鐘收到同步信息時,由於傳輸路徑的關係,會有傳遞延遲時 間的產生,所以收到同步信息的時間以下式表示:
Ts1 = Tm1 + O + Dm-2-s (3.1)
當從時鐘收到後續信息後,發出延遲要求信息(Delay Request message)給主時 鐘,以Ts2表示;主時鐘收到延遲要求信息的時間可表示為
23
Tm2=Ts2 − O+Ds-2-m (3.2)
主 時 鐘 收 到 延 遲 要 求 信 息 後 , 發 出 一 個 延 遲 回 應 信 息 (Delay Response message)給從時鐘,此信息包含有關收到延遲要求時的時戳資訊;當從時鐘收到延 遲回應的信息時,可計算出主、從時鐘間的延遲時間以及時間差,遂將主、從時 鐘之間的時間做出補償,達成時間同步。
3.1.1 延遲時間與時間補償
由圖 3.1 整理如下:1. 單向時間延遲(One way delay)
Dm-2-s + O = Ts1 – Tm1 (
Q
Ts1=Tm1+O +Dm-2-s) (3.3)Ds-2-m – O = Tm2 – Ts2 (
Q
Tm2=Ts2 – O+Ds-2-m) (3.4)單向時間延遲則為
D = [(Dm-2-s +O)+(Ds-2-m – O )] / 2 (
Q
D = (Dm-2-s + Ds-2-m )/2 ) (3.5)通常會先假設 Dm-2-s與 Ds-2-m相等,但是若在能夠取得路徑延遲的相關資訊情 況下修正單向時間延遲,將會使之更為精確。
2. 與主時鐘的時間補償(Offset from master)
O = Ts1 –Tm1–D (
Q
Ts1 = Tm1 + O + Dm-2-s≅
Tm1 + O + D) (3.6)由(3.6)式可得到與主時鐘的時間補償。
24
3.1.2 協定中重要的假設
在協定之中必須先確定一些假設是否被滿足,才可以使協定能夠順利的運作,
假設如下
1. 網路必須支援多點廣播通訊(Multicast)
所有 PTP 的非管理信息(Non management messages)必須藉由多點廣播來通訊,
而PTP 的管理信息則是可以利用多點廣播或是點對點(Point to point)通訊;所以建 議在使用PTP 通信的網路能夠使用多點廣播,至於點對點需要存在的理由則為:
(1) 當網路中的時鐘(節點)個數增加時,未使用點對點通訊將會使同步估測不良。
(2) 不使用點對點通訊也會使得各節點時鐘在執行協定時的需求變得更複雜。
2. 必須避免多點廣播信息超出子網域外。
3. 每個時鐘要執行協定必須滿足:
(1) 時鐘的振盪器頻率的精確度與穩定度必須在 SI 秒的 0.01%。振盪器的穩定度 必須與時鐘辨識(Clock identifier)以及時鐘變異數(Clock variance)一致。
(2) 在 PTP_SLAVE 狀態的 PTP 時鐘必須能夠修正它的時間至與主時鐘一致,所以 可以調整的範圍需要在至少 0.02%的 SI 秒等級。
4. 時鐘所陳述的數值,例如它的時鐘階層、時鐘辨識等如下表,必須正確地描述。
表 3.3、時鐘階層的定義
Stratum number Specification
0 在執行PTP 時,暫時視為比其他時鐘還要好的時鐘等級
1 不會跟隨PTP 系統裡的其他時鐘,為原始參考標準。如:
GPS 時鐘或是原子鐘。
2 為次要參考標準時鐘。直接經由stratum 1 時間同步得來。
3 能 發 出 外 部 計 時 訊 號 和 設 定 PTP 外 部 同 步 旗 標 (PTP_EXT_SYNC flag)為真的最低時鐘階層門檻。
4 不能發出外部計時訊號,因此設定 PTP 外部同步旗標
(PTP_EXT_SYNC flag)為假的最低時鐘階層門檻。
5-254 保留此區間數值。
255 內定值;此階層時鐘不可能為最好的主時鐘。
25
表 3.4、時鐘辨識的定義 時鐘辨識
(ASCII)
相對應的時
鐘階層 說明
ATOM 1 時間從一個校準過的原子中得到,維持 UTC 時間
精準至25ns 以下。
GPS 1 時間從一個正確操作的GPS 接收機得來,維持 UTC
時間精準至100ns 以下。
ATOM 2 穩定的時鐘,其精準至100ns 之間,上一次的時間
校準是由時鐘階層1 的 ATOM 直接校準。
GPS 2 穩定的時鐘,其精準至100ns 之間,上一次的時間
校準是由時鐘階層1 的 GPS 接收機直接校準。
NTP 2
利用NTP 或是同等的協定並維持 UTC 時間在 15ms 以下或是穩定的時鐘且上一次與NTP 校準至 50ms 以內。
HAND 2 或更大 設定與UTC 時間精確在 10 秒內。
INIT 2 或更大 設定與使用者自訂時間至非特定精準度。
DFLT 3 或更大 假如沒有其他時鐘辨識可供使用時,可使用之。
為了讓時鐘的同步效能可以達到最佳化,必須滿足下述假設:
1. 網路的時間延遲不管是從主時鐘到從時鐘或者是從時鐘到主時鐘,兩者的延遲 時間須對稱。
2. 一個時鐘可能包含非對稱的延遲在它的時戳機制或是協定路徑中,(可分為外部 等待時間,時鐘時戳點間到外部同步信息或延遲要求信息的通訊媒介的傳遞時 間;內部等待時間,通訊媒介到同步信息和延遲要求信息的時鐘時戳點間的傳 輸時間,如圖3.2),假如這些延遲無法忽略,就必須正確地計算出來。
26 PTP時鐘埠
PTP程式碼
內部協 外部協 定堆疊
定堆疊
內部信息時鐘時戳點
內部等待時間 外部等待時間
外部信息時鐘時戳點
通信媒介
信息時戳點 xxxxxxxxxxxxxxx…….110101010101
同步或延遲要求封包
圖 3.2、等待時間常數的定義
如圖3.2 所示,同步或延遲要求信息通過通信媒介後,由內部協定堆疊的底部 進入,與內部信息時鐘時戳點產生內部等待時間。修正等待時間方法如下:
對於修正外部等待時間可由下列三種數值來討論:
(1) 原始時戳(Origin timestamp)
原始時戳的欄位值是發佈同步或延遲要求信息的時鐘發出這些信息時的時間,
這個值有一個絕對的誤差,大約小於0.25 秒。與此時戳相關的指令為 PTP_ASSIST,
當PTP_ASSIST 為 FALSE,主時鐘不會發送後續信息,原始時戳會包含等待時間,
而此時戳的值會是正值。當PTP_ASSIST 為 TRUE,主時鐘會發送後續信息,原始 時戳會包含等待時間,此值會是正值,或當同步信息發送時並未有估測值時,此 值可為0。
(2) 精確原始時戳(Precision origin timestamp)
精確原始時戳的欄位值為相關聯的同步信息時戳點經過外部時鐘時戳點的時
間,這個值有一個絕對的誤差,大約小於 0.25 秒。與此時戳相關的指令為
PTP_ASSIST , 當 PTP_ASSIST 為 FALSE , 主 時 鐘 不 會 發 送 後 續 信 息 。 當
27
PTP_ASSIST 為 TRUE,主時鐘會緊接著同步信息後面發送後續信息,這個值與跟 同步信息有關的區域時鐘變異數(Local clock variance)一致,此值為正數。
(3) 延遲要求傳送時間(Delay request sending time)
從時間發出延遲要求信息,在外部協定堆疊所量測到的時間點。
以上三種數值的修正如下:
把同步信息或傳遞延遲信息量測到的外部協定堆疊時鐘時戳點之值紀錄為<
量測值>,則上述三數值為:<量測值>+外部等待時間(Outbound latency)。
對於修正內部等待時間可由下列兩種數值來討論:
(1) 同步信息接收時間(Sync receipt time)
從時鐘收到同步信息時,從時鐘所量測到的內部協定堆疊時間點。
(2) 延遲接收時戳(Delay receipt timestamp)
由接收到延遲要求信息的時鐘量測延遲要求信息經過內部時鐘時戳點所發出 來的時戳。
以上兩種數值的修正如下:
接收時戳由內部協定堆疊的時鐘時戳點測量出來,並記錄為<量測值>,其修 正為<量測值> 內部等待時間(Inbound latency)。
3. 主、從時鐘間的網路延遲必須為超過 PTP 延遲要求間隔(PTP delay request interval) 的固定值。
4. 邊界時鐘必須用來與子網路作同步;邊界時鐘在與子網路同步的過程中,擔任 主時鐘的角色。
5. 藉由下列兩種方法減少因網路成員和時鐘內協定堆疊所產生的延遲變動:
(1) 盡量讓 PTP 中傳輸的時戳貼近網路實體層。
(2) 由協定堆疊和未被邊界時鐘隔開的網路成員(Clocks)所產生的延遲,可以利用 平均的概念來減少,例如在時鐘伺服上的設計,引入平均方法作改良。
6. 時鐘的功率要足夠,在每個子網路的時鐘數量不可太多。
7. 時鐘的振盪器內部穩定度不可太差。
28
3.2 精確時間同步協定(PTP)系統
(BC-1)Switch or repeater Node 1
Slave clock
Node 3 Slave clock
Node 2 Master clock
Node 5 Slave clock Node 4
Slave clock
(BC-2)Switch or repeater
:Slave clock
:Master clock
圖 3.3、同步時鐘系統
如圖3.3 所示,Node1、Node3、Node4 及 Node5 為從時鐘(Slave clock),由於 是單一埠(Port),又可稱之為普通時鐘(Ordinary clock);BC-1、BC-2 可能為交換器 或是中繼器,由於連接了多個埠,所以內部的時鐘皆可稱之為邊界時鐘(Boundary clock),至於 Node2 為主時鐘,但是因為是單一埠,所以可知它並非由其他時鐘同 步得來,這類型的時鐘,稱之為領導時鐘(Grandmaster clock);每一個領導時鐘可 以組織出一個次網域(Subdomain)。
圖 3.3 中,Node1、Node2、Node3、Node4 及 Node5 為不同路徑,路徑與路徑 間溝通需經由交換器或中繼器,亦即,不同路徑的普通時鐘之間需借助邊界時鐘 來做溝通。
圖 3.3 中,有許多節點或邊界時鐘,在 PTP 中它們都有各自的編號以做區別,
這個編號稱為UUID。而且依照時鐘和埠的不同有 Port-UUID 和 Clock-UUID 來辨 識不同的時鐘及埠。
29
3.3 PTP 狀態及狀態機
表 3.5、PTP 狀態列表
狀態 描述
PTP_INITIALIZING 於此狀態的埠將使資料集、硬體和時鐘通信的值初始化。
PTP_FAULTY 協定錯誤的狀態。在此狀態的埠將不會參與協定的同步,
但是會去做特定的除錯測量來消除此錯誤。
PTP_DISABLED 在此狀態的埠將不會送出任何信息至它的通信路徑上。
PTP_LISTENING 在此狀態的埠等待“同步信息”接收“同步暫停”來中止活 動或者是等待接收來自主時鐘的同步信息。
PTP_PRE_MASTER 在此狀態的埠為PTP_MASTER 狀態,除了不會送出任何 非管理信息到它的通信路徑上。
PTP_MASTER 在此狀態的時鐘被用來製作接收或發送信息的時戳。
PTP_PASSIVE 在此狀態的埠不會送出任何非管理信息到它的通信路徑 上。
PTP_UNCALIBRATED
這個狀態可以為一個暫態,提供同步伺服的初始化和資料 集的更新,和其他特別的除錯動作,當一個新的主時鐘被 選定時,則可進入下一個狀態。
PTP_SLAVE 在此狀態的埠可以跟主時鐘做同步。
如表3.5,為 PTP 在執行時候的狀態,以上表所列的狀態構成協定引擎狀態機 (Protocol engine state machine)如圖 3.4 所示:
30
圖 3.4、協定引擎狀態機[6]
31
由圖 3.4,可將之分為三個部分,(1)、(2)、(3),(a)、(b)、(c)、(d)、(e)、(f) 以及(I)、(II)、(III)、(IV)。
任何狀態(1)在收到初始化的指令後,可到 PTP 初始狀態(2),也有可能開始執 行協定(Powerup)而到狀態(2),到達狀態(2)後,接著到達狀態(3),相關說明可參照 表3.5 及表 3.6。
狀態(a)經由選擇最好的主時鐘演算法,評定為主時鐘時,可至狀態(b),經過 限定條件時間暫停終止指令可到達狀態(c),若狀態(a)經由狀態改變指令,則可能 至狀態(f)或是偵測出狀態中有錯誤而跑到狀態(d),若繼續偵測出錯誤則會一直停 在狀態(d)或是利用指定中斷到狀態(e),而狀態(e)可以經由指定開啟到達狀態(2),
狀態(d)若是經由錯誤清除則可直接回到狀態(2)。
狀態(I)若經由同步信息接收時間暫停終止指令可以到達狀態(c),若原本為主 時鐘但是後來加入新的時鐘時,如同狀態(II),將使得狀態(II)跑至狀態(III),經由 已有選出的主時鐘指令後,可跑至狀態(IV),狀態(IV)中,若同步發生錯誤則會回 到狀態(III),若狀態(IV)中,有新加入的時鐘,且新的主時鐘為舊的主時鐘,在此 狀態的其他原本從時鐘就會繼續停留在此狀態,若是新的主時鐘不為舊的主時鐘,
則此狀態的時鐘會回到狀態(III)。
32
狀態機的各個狀態間的事件列表及適用性如下:
表 3.6、狀態機上的事件
事件名稱 說明及應用
POWERUP PTP 的啟動;狀態機的每個埠都會有影
響。
INITIALIZE PTP 的初始化;狀態機的每個埠都會有
影響。
FAULT_DETECTED 錯誤的偵測;狀態機上所有發生錯誤埠
都會有影響。
FAULT_CLEARED 錯誤的清除;狀態機上所有發生錯誤埠
都會有影響。
STATE_CHANGE_EVENT 狀態改變;狀態機上會發出此信號的埠 才有影響。
BEST_MASTER_CLOCK 執行挑選最好的主時鐘的演算法;與此 信號關聯的埠才有影響。
SYNC_RECEIPT_TIMEOUT_EXPIRES QUALIFICATION_TIMEOUT_EXPIRES
同步信息接收時間暫停終止、限定條件 時間暫停終止;與終止時間暫停的機制 相關聯的狀態才有影響。
DESIGNATED_ENABLED DESIGNATED_DISABLED
指定觸發、指定中斷;內部管理信息所 指定的狀態才會受影響。
MASTER_CLOCK_SELECTED 已有選出的主時鐘;經過挑選最好的主 時鐘之演算法後,會有此事件。
SYNCHRONIZATION_FAULT 同步發生錯誤;在發生錯誤的埠所關聯 的狀態會有此信號產生。
33
3.4 單一主時鐘與從時鐘
在最單純的同步架構中,由一個主時鐘和一個從時鐘組成。它們各自的狀態 程序如下:
圖 3.5、主時鐘狀態流程
由圖3.5 可知,主時鐘啟動協定後,先進行初始化,然後進入等待狀態,此狀 態為等待是否有其他時鐘傳來同步信息,若有,則此時鐘為從時鐘,若無,則到 下一個狀態(PTP_PRE_MASTER)或是等待接收同步信息的時間暫停終止,此意謂 沒有其他時鐘宣告自己為主時鐘,進而到達 PTP_MASTER 狀態成為主時鐘。而 PTP_PRE_MASTER 狀態在限定條件時間暫停終止後,也會進入 PTP_MASTER 狀 態成為主時鐘。
34
圖 3.6、從時鐘狀態流程
由圖 3.6 可知,從時鐘啟動協定後,會先初始化,然後進入等待的狀態,當狀 態變為 PTP_PASSIVE 時,則會進入 PTP_UNCALIBRATED 這個暫態,若有新的 主時鐘被選出後,送出同步信息,使得此時鐘收到同步信息,進入PTP_SLAVE 狀 態,成為從時鐘。另一路徑為當時鐘處於等待的狀態(PTP_ LISTENING)時,若在 此時收到由主時鐘發出的同步信息,則進入PTP_SLAVE 狀態成為從時鐘。
35
第4章 精確時間同步協定程式
4.1 精確時間同步協定軟體
精確時間同步協定軟體(Precision time synchronization protocol daemon, PTPd) 是由Kendall Correll, Nick Barendt and Michael Branicky 所開發[8][9],其軟體架構
如圖4.1;現今被運用於測試與量測系統,同時,根據測試與量測系統所要的需求
而改變伺服機構(Servo)的內容,為了使典型測試與量測系統的網路拓樸能夠更穩 定,伺服機構就必須更優化。
Protocol Engine
Kernel
Timer BMC
Algorithm
Time Stamp
Net Layer Msg
Packer
Start-up Clock
Servo
圖 4.1、軟體精確同步時間協定之架構[9]
圖 4.1 中 , Protocol Engine 為 撰 寫 協 定 狀 態 機 和 信 息 收 發 之 處 ; BMC Algorithm(Best master clock algorithm)為撰寫比較最好的主時鐘演算法之處;Clock Servo 為處理時間補償(Offset from master)和時間延遲(Master to slave delay, Slave to master delay)之處,同時,在此段程式中,加入濾波器用來減少抖動現象;Msg Packer 將資料封裝進PTP 信息或對 PTP 信息做擷取的動作;Net Layer 在 PTP 時鐘間做 初始化的連結、資料的收送,或將時間郵戳傳遞給事件信息;Time Stamp 記錄信
![圖 3.4、協定引擎狀態機[6]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9607537.633243/40.892.133.756.124.1015/圖34協定引擎狀態機6.webp)