植基於邊緣特徵空間關係之影像查詢技術
潘迎欣
國立台中技術學院 資訊管理系 psal0524@yahoo.
com.tw
陳姿君
國立台中技術學院 資訊管理系
likedoudou@yahoo.
com.tw
翁倩儀
國立台中技術學院 資訊管理系
wennieghost@yahoo.
com.tw
吳憲珠
國立台中技術學院 資訊工程系 [email protected]
摘要
本文提出一個新的以影像內容為查詢依據 之 影 像 查 詢 技 術 (Content -based Image Retrieval,CBIR)。以查詢影像內容為主之 技術,其重要的關鍵乃在於從影像中擷取 出具有區隔能力之特徵作為依據,發展出 快速且精確的影像查詢系統。本文提出新 的影像特徵分析方法:邊緣偵測特徵及邊 緣樣式共相關矩陣。將此兩種的特徵與顏 色直方圖相結合可以兼顧紋理特徵、空間 關係以及色彩分佈之優點,進而有效地提 升影像辨識的準確性。
關鍵詞:CBIR、直方圖分析法、邊緣偵 測、邊緣樣式共相關矩陣
一、簡介
隨著多媒體時代的到來,網際網路的 環境日漸成熟,數位技術也高度普及化,
影像科技的便捷性與即時性,使得每日都 會產生龐大的數位資料,網際網路上影像 查詢技術逐漸取代文字查詢技術的地位,
例如:醫學影像管理、博物館文物典藏、
地理資訊系統、人臉指紋辨識、數位圖書 館、入口網站的查詢系統等各種領域裡,
都可看見數位影像技術廣泛被運用,因為 從影像裡能帶來更多額外的資料,有些想 查詢的內容是無法使用文字來描述,因此
獲得有效資訊的正確性會提高。如何將這 些影像資料建構出一個有效率處理影像的 機制轉化成為人們所需的資訊,同時不遺 漏影像內的資料,得以了解影像資料技術 的查詢方式已成為當前最受矚目的研究議 題。
近年來的影像內容查詢技術(Content -based Image Retrieval,CBIR)[11]裡,大 部份都以查詢影像內容為主要研究方向,
一般可依影像顏色的分佈[2],[5]、紋理結 構[6],[10]、外形[1],[4]等分類做為影像 的特徵,建立影像資料庫索引檔來查詢資 料。顏色直方圖(Color Histogram) [15]
是最常被使用的特徵之一來當為查詢的依 據,因為方法簡單且計算快速,但此方式 只能表示影像的全域資訊,而無法取得影 像的紋理變化以及影像物件之間相互的空 間關係。假使有兩張影像內容相同但彩度 不同,單單運用顏色直方圖的話,會因為 無法判斷出它們紋理特徵相同而導致影像 相似度非常低,因此錯誤率會相當的高。
另外,學者 Huang 針對顏色直方圖的缺點 提 出 顏 色 相 關 直 方 圖 的 方 法 (Color-Correlogram,CC) [3],[7],[8],
[11],[16]對顏色之間的空間分佈情形的資 訊加以改良做為影像查詢的特微,雖然此 方法參考到顏色空間的關係但仍然存在一 些缺點,就是沒有將物件邊緣的紋理特微 考量進去,而且也無法抵抗影像內容中的 物件位移或旋轉的發生。因此針對查詢物
件時的精確度則稍嫌不足。為了將這些問 題排除,本研究提出以的邊緣偵測當作影 像紋理空間擷取特徵,並且透過邊緣樣式 共相關矩陣利用 Sobel 運算後得到的梯度 值可以組成十六種的可能組合-紋理樣式 值累積在共相關矩陣中,同時結合顏色直 方圖的色彩分佈,改善物件之間的空間關 係,發展出一套重紋理特徵的影像查詢系 統。
二、相關研究
(1) 邊緣偵測技術
影像處理上的梯度大小是用一階導數 來實現,如方程式(1)影像 f 的(x,y)像素點 的梯度定義,此向量大小如方程式(2),其 中牽涉到平方根的運算,一般做法是用絕 對值來近似梯度的大小,如方程式(3),雖 然同向性的特質會消失,但計算較簡單且 能保持灰階的相對變化。
y f x f
G f G
y
x (1)
2 2
12 2 2 12)
(
y
f x G f
G f mag
f x y (2)
y
x
G
G
f
(3)1. Roberts 交叉梯度運算子(Roberts cross-gradient operator)
Roberts[13]於 1965 年提出邊緣偵測的 方法,其使用
2 2
的遮罩算出梯度,如圖 一給定的的係數,方程式(4)計算時參照圖 二的編號,其中 z 為灰階像素值。圖 一:Roberts 交叉梯度運算子
圖 二:
3 3
影像區域
8 6
5 9
z z G
z z G
y x
及 (4)
2. Prewitt 運算子(Prewitt operator) 由 Prewitt[12]於 1970 年提出,這是以
3 3
的遮罩進行運算,有中心點,容易實 現,是個效果不錯的邊緣偵測方法,其係 數如圖三及方程式(5)、方程式(6)所示。圖 三:Prewitt 運算子
z z z z
1z
2z
3
G
x
7
8
9
(5) z
3z
6z
9 z z
4z
7
G
y
1
(6)z
1z
2z
3z
4 z5 z6z7 z8 z9
-1 0
0 1
0 -1
1 0
-1 -1 -1 0 0 0 1 1 1
-1 0 1 -1 0 1 -1 0 1
3. Sobel 運算子(Sobel operators)
Sobel[14]於 1970 年提出,修正 Prewitt 運算子的係數,給予中心點多一倍的權 重,目的在於達到平衡,其運算方式及係 數如圖四及方程式(7)所示。
圖 四:Sobel 運算子
732
8 6 9 9
1 12
2 4 3 7
2 2
z z z z z z
z z z z z z f
(7)(2) 影像查詢技術 1. 顏色相關直方圖
顏色相關直方圖技術是參考顏色之間 的空間分佈情形的資訊,此方法是定義影 像
I
中 有n
個 像 素 , 存 在n
C
mC
C
、1 、2 ... 、 等 m 種顏色,如此可在 影像中獲得m
種類的顏色關係來累積m
機率。因此顏色相關直方圖方法是以顏色 屬性做為影像的特徵查詢出相似圖。雖然 此方法將顏色間的關係表達出來,但對於 影像內容中明暗變化以及物件的邊緣特徵 沒有考量進去,所以精確度並不太高。2. 顏 色 共 相 關 矩 陣 (Color Co-occurrence Matrix , CCM)
針對顏色相關直方圖取得的特徵並無 考量到色彩空間分佈的關係,顏色共相關 矩陣 (Color Co-occurrence Matrix , CCM) 改善此項缺失,增加矩陣來儲存顏色關係
的機率。CCM的矩陣大小是依據影像顏色 種類的多寡來產生,所以一張256色的影像 會產生一個大小為
256 256
的CCM。如果 使用一張多色調(multi-tone)的影像會導致 CCM矩陣的佔用的儲存空間增大而且花 費的計算時間會較久,查詢時執行速度會 變慢。此外,CCM 雖以色彩分佈的空間 關係為特徵,但如有外來因素使得色彩複 雜度變高,對於色彩複雜度的敏感度低,因此會降低精確度。
3. 樣式共相關矩陣(Motif Co-occurrence Matrix , MCM)
此技術是由Jhanwar[9] 等人提出,以一 個3D矩陣,找出可能的樣式值,首先將每 張影像切割成數個
2 2
的區塊,每個區塊 都使用Peano scanning 方法以不重複方式 (non-overlapping) 或 重 複 的 方 式 (overlapping)進行處理並取代成特定的樣 式值(motif),樣式值的產生是先固定左上 的像素分別對右上、左下與右下進行計 算,與像素i
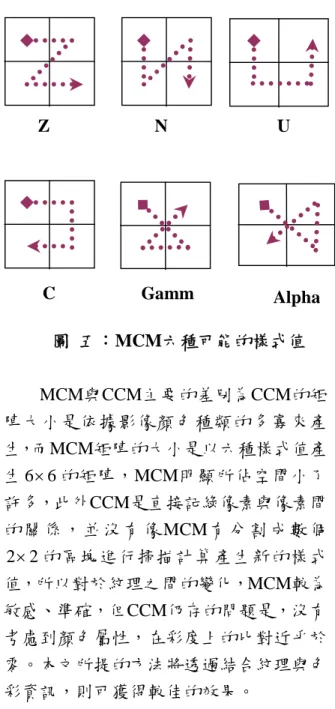
距離最小者先選定,依照此模 式 比 較 運 算 後 , 將 有 六 種 可 能 的 樣 式 值”Z”, ”N”, ”U”, ”C”, gamma和alpha做 為特徵值,如圖 五所示。最後計算計算兩 張影像中每種樣式值之間的關係儲存於6
6
的 樣 式 共 相 關 矩 陣 (Motif Co-occurrence Matrix , MCM)計算出機率。-1 -2 -1 0 0 0 1 2 1
-1 0 1 -2 0 2 -1 0 1
圖 五:MCM六種可能的樣式值
MCM與CCM主要的差別為CCM的矩 陣大小是依據影像顏色種類的多寡來產 生,而MCM矩陣的大小是以六種樣式值產 生
6 6
的矩陣,MCM明顯所佔空間小了 許多,此外CCM是直接記綠像素與像素間 的 關 係 , 並 沒 有 像 MCM 有 分 割 成 數 個2
2
的區塊進行掃描計算產生新的樣式 值,所以對於紋理之間的變化,MCM較為 敏感、準確,但CCM仍存的問題是,沒有 考慮到顏色屬性,在彩度上的比對近乎於 零。本文所提的方法將透過結合紋理與色 彩資訊,則可獲得較佳的效果。三、研究方法
本研究以 Sobel 的邊緣偵測、半放射 狀掃描共相關矩陣與顏色直方圖做為基 礎,發展一套重紋理特徵的影像查詢系 統。邊緣偵測有眾多種方式,本研究採用 Sobel 的原因有兩點:
1. 與 Roberts 的交叉梯度運算子(Roberts cross-gradient operator)比較,Roberts 較不 易實現,且能取得的紋理樣式太少,空間 關係的範圍太小,同時,
3 3
的遮罩大小 有明確的中心點比偶數的遮罩容易實現。2. 與 Prewitt 運算子(Prewitt operators)比 較,雖然 Prewitt 遮罩較 Sobel 遮罩容易完 成,但我們仍需 Sobel 優越的雜訊抑制特 性,而這也常成為影像查詢技術中的一大 議題。
本研究是一種紋理特徵與空間關係兼 俱,再搭配色彩複雜度的影像查詢技術。
第一項特徵值是採用 Sobel 的邊緣偵測,
針對獲得的梯度值,以
2 2
的像素掃描擷 取樣式值,並利用邊緣樣式共相關矩陣來 儲存紋理關係。第二項特徵值是顏色直方 圖正規化的特徵值。查詢時,先比較此兩 項特徵值差異和,越小者與查詢圖越相 近,詳細處理說明如下:(1) Sobel 的邊緣偵測
彩 色 的 數 位 影 像 有 R(Red) 、 G(Green)、 B(Blue)三 原色 , 在求出邊緣 時 , 採 YUV 的 方 式 求 得 顏 色 強 度 (0~255),並以
3 3
的遮罩掃描,如圖六垂 直、水平遮罩、圖七正負 45 度遮罩所示,再計算兩者的梯度和,若梯度小於 200 者,則將梯度設為零,以此方式,這四個 遮罩的貢獻都可完整保留,也只會留下邊 緣訊息強烈者的梯度,可由圖八、圖九及 圖十得知較清晰、較少多餘線條,幾乎只 留下主體的邊緣。
圖 六:利用垂直、水平遮罩
圖 七:利用正負 45 度遮罩 0 1 2
-1 0 1 -2 -1 0
-2 -1 0 -1 0 1 0 1 2 -1 -2 -1
0 0 0 1 2 1
-1 0 1 -2 0 2 -1 0 1
N U
Z
C Gamm Alpha
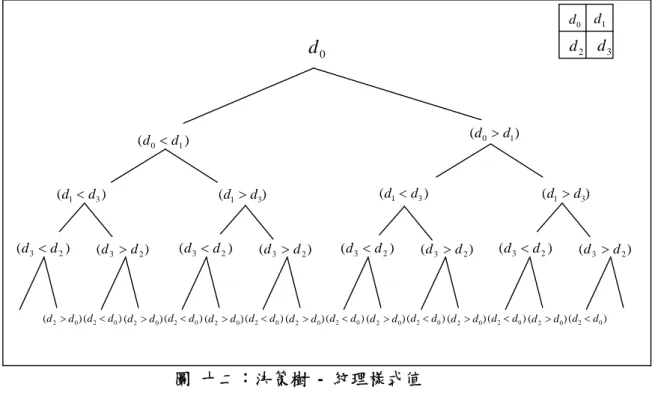
圖 十二:決策樹 - 紋理樣式值
圖 八:查詢原圖
圖 九:梯度大於 0 圖 十:梯度大於 200
(2) 邊緣樣式共相關矩陣
由 Sobel 運算後得到的梯度值,用比 較大小的方式來獲得第一種特徵值,其中 比較方式如圖十一,第一次方向由
d 與
0d
1 比較,第二次由d 和
1d 比較,第三次由
3d
3 和d 比較,第四次由
2d 再和
2d 比較,正好
0繞一圈,每次比較結果有兩種,一種是前 面的像素值小於後面的像素值,一種是前 面的像素值大於後面的像素值,根據四次 的 比 較 結 果 , 可 得 16 種 可 能 的 組 合
16
2
4
,如同圖十二的決策樹。為能擷取 更大範圍的影像紋理特徵,這些組合與鄰 近的樣式值能表現出各個區塊包含的更多 紋理關係,故累積在邊緣樣式共相關矩 陣,其矩陣大小即為16 16
的二維矩陣。圖 十一:利用 Sobel 運算得到梯度值比較方式
d
1d
2d
3d
0d
1d
2d
3d
0d
1d
2d
3d
0d
1d
2d
3d
0)
(d0d1 (d0d1)
)
(d1d3 (d1d3)
)
(d3 d2 (d3d2)
)
(d2d0 (d2d0)(d2d0)(d2d0)(d2d0)(d2d0)(d2d0)(d2d0)(d2d0)(d2d0)(d2d0)(d2d0)
)
(d3 d2 (d3 d2) (d3 d2) (d3 d2) (d3d2) (d3d2) )
(d1d3 (d1d3)
)
(d2d0 (d2d0)
d0 d1 d2 d3
d
0累積方式採重複(overlapping)和半放 射狀(semi-radial)的方式掃描,如圖十三中 心點是 10 與左上角是 8,對應在(10,8)的 位置上加一累積,中心點是 10 與正上方是 6,那就在(10,6)的位置上加一累積,中心 點與右上角、中心點與正左方同理,如此 一來,整張影像的紋理特徵都紀錄在邊緣 樣式共相關矩陣中。
圖 十三:邊緣樣式共相關矩陣放射方向
最後將存在共相關矩陣內的值除以總 像 素 個 數 , 此 步 驟 稱 作 「 正 規 化 (Normalization)」,正規化能將大小不一的 影像,規範其特徵值在 0~1 之間,且總和 為 1,此步驟能將大小不一的影像順利查 詢出來。
(3) 顏色直方圖
彩色的數位影像中,顏色對圖片的資 訊貢獻也很大,本研究使用最基本的技術
「顏色直方圖」來增強顏色的特徵,其方 法首先將影像分離成 R(Red)、G(Green)、
B(Blue)三個色版,分別累積影像中每個像 素值(0~255)出現次數,得到三個直方圖 (0~255),個別是 R、G、B 三原色,再將 直方圖中的每個值除以總像素個數,此步 驟稱作「正規化」,其意義等同於取得紋理 特徵值做的正規化,最後顏色特徵值完成。
(4) 差異的求算
將欲查詢之影像計算出紋理特徵值與 顏色特徵值,再將影像資料庫中的影像已 事先計算好的特徵值取出,這樣的方式,
便於日後查詢時特徵值的取得,加快查詢 的速度。
差異只計算欲查詢之影像非零的特徵 值位置與其他影像對應的位置之差,此兩 值之差再除以兩值相加之和,將結果計算 出的總和,即為差異,此方式是將差異正 規化,使得差異的值接近零,大多都是落 在 0~10 之間的浮點數。
以紋理特徵值來說,一個
16 16
的共 相關矩陣中,當欲查詢之影像在(0,0)的位 置等於零,則跳過不計算於差異內,若(0,1) 的位置不等於零,則擷取該張資料庫的影 像在(0,1)的值,計算兩值之差再除以兩值 相加之和,以此方式處理共相關矩陣後,其值之和當做為紋理特徵值的差異。
以顏色特徵值來說,三個 256 的陣列 各是代表紅、綠、藍三種顏色的特徵值,
當欲查詢之影像在紅色 159 像素值的機率 為零,則跳過不計算於差異內,在紅色 160 像素值的機率不為零,則擷取該張資料庫 的影像在紅色 160 像素值的機率,計算兩 值之差在除以兩值相加之和,以這個方式 處理三種顏色的直方圖,其值之和當做為 顏色特徵值的差異。
最後將紋理特徵值差異與顏色特徵值 差異相加,其值愈小者愈相似。
四、 演算法
以下說明本文所提出方法的步驟:
(1) 流程 步驟 1:讀檔
彩 色 影 像 讀 入 將 三 原 色 分 別 放 入 Red[][]、Green[][]、Blue[][]的陣列中,並 以 YUV 的方式計算灰階值存入 Gray[][]。
Gray[i][j]=(int)(0.299
Red[i][j]+0.587
Green[i][j]+0.114
Blue[i][j]);步驟 2:採用Sobel求出梯度
用以下四個遮罩水平、垂直、負 45 度、正 45 度,對 Gray[][]掃描求得的值,
8 6
即為梯度,且只有留下梯度大於 200 的梯 度值,存在 Edge[][]中。
int[][]h={{-1,-2,-1},{0,0,0},{1,2,1}};
int[][]v={{-1,0,1},{-2,0,2},{-1,0,1}};
int[][]n={{0,1,2},{-1,0,1},{-2,-1,0}};
int[][]p={{-2,-1,0},{-1,0,1},{0,1,2}};
步驟 3:針對梯度求出樣式值
樣式值取得的方式是以
2 2
的樣式 值繞一圈比大小而得的,如同以下處理:String kind ="";
kind+=edge[i][j]>edge[i][j+1]?1:0;
kind+=edge[i][j+1]>edge[i+1][j]?1:0;
kind+=edge[i+1][j]>edge[i+1][j+1]?1:0;
kind+=edge[i+1][j+1]>edge[i][j]?1:0;
kind 的值就像是 4bits 由 0、1 組成的二進 制,此時再將 kind 轉成十進制,其範圍從 0~15,整張影像都計算出樣式編號,儲存 到 Motif[][],故邊緣樣式共相關矩陣為
16
16
的二維陣列。步驟 4:將紋理關係累積到邊緣樣式共相 關矩陣
以重複方式的半放射狀方式掃描,累 積到邊緣樣式共相關矩陣 EMCM[16][16]
中。
EMCM[Motif[i][j]][ Motif[i-1][j-1]]++;
EMCM[Motif[i][j]][ Motif[i-1][j]]++;
EMCM[Motif[i][j]][ Motif[i-1][j+1]]++;
EMCM[Motif[i][j]][ Motif[i][j-1]]++;
步驟 5:正規化邊緣樣式共相關矩陣 完成紋理關係的累積後,將累積的次 數轉成機率,正規化方式即是將共相關矩 陣的各個值除以總像素個數,則取得紋理 特徵值。
EMCM[i][j] /= totalpixels;
步驟 6:累積顏色直方圖
由讀入影像的 Red[][]、Green[][]、
Blue[][]個別累積在 Rhisto、Ghisto、Bhisto 的直方圖中。
Rhisto[red[i][j]]++;
Ghisto[green[i][j]]++;
Bhisto[blue[i][j]]++;
步驟 7:正規化顏色直方圖
完成顏色次數的累積後,將累積的次數轉 成機率,正規化即是將三色直方圖個別除 以總像素個數,則取得顏色特徵值。
Rhisto[i] /= totalpixels;
Ghisto[i] /= totalpixels;
Bhisto[i] /= totalpixels;
步驟 8:兩項特徵值差異計算,再排序 一張欲查詢之影像Q按照步驟1到步 驟6求出兩項特徵值,對資料庫中影像D作 查詢,影像D都已事先計算好特徵值另存 起來,故可直接讀出影像D的特徵值,只 在Q的特徵值不為零的位置,進一步計算 與D對應特徵值的差異,其計算方式為兩 值之差除以兩值相加之和,在共相關矩陣 的地方,紋理特徵值差異的總和(motifdiff) 乘以3倍,作為權重,在直方圖的地方,注 意三原色各自累積差異後,將差異相加,
以此作為顏色特徵值colordiff,則總差異 (totaldiff)為紋理特徵值與顏色特徵值之 和,其處理如下:
if(EMCMq[i][j] != 0){
motifdiff+=Math.abs(EMCMq[i][j]-EMCMd [i][j])/ (1+EMCMq[i][j] +EMCMd[i][j]);
if(histoq[i] != 0){
colordiff+=Math.abs(histoq[i]-histod[i])/ (1+
histoq[i] +histod[i]);
totaldiff = motifdiff * 3 + colordiff ;
最後將差異的結果儲存在陣列中,排 序結果愈小者表示愈相似,最後即可輸出 相似的圖。
(2) 分析:
事先將兩種特徵值儲存起來,時間複 雜度分成計算特徵值和計算差異階段。
計算這兩種特徵值的時間複雜度上,
無可避免的都在 O(寬
高)的上限,但因為 使用 Sobel 的關係,計算以加減法為主,所以計算速度將會快速一點。而計算差異 的地方,因為是將原先計算的特徵值讀 出,時間複雜度能控制在 O(16
16+3
256) 的線性時間,假設資料庫有 N 張 n
n 的影 像,現在輸入一張 n
n 的影像,首先計算 兩種特徵值,則至少需要 O(n2)的時間,計 算差異,每一張與輸入的影像比較,則只 需 O(16
16+3
256)的常數時間,與資料 庫的 N 張影像作比較,也只須 O(N
(16
16+3
256))=O(N)的線性時間即可完 成,在時間複雜度的角度來看,本研究方 法有很大的貢獻。五、實驗結果
本研究以 Sobel 的邊緣偵測的梯度為 依據,用比較的方式得到樣式值,採重疊 方式的掃描累積在邊緣樣式共相關矩陣,
再用顏色直方圖加以輔佐。本研究方法(以 Sobel-CM 表示)與重疊方式的 MCM 在商 標圖、灰階紋理圖、建築物這三個資料庫 比較,使用的比較標準是第一張傳回正確 的正確率,公式為:Precision =TP/(TP + FP),以及前十張傳回正確的查詢率,公式 為:Recall =TP/(TP + FN),其中,TP:代 表查詢到的相似圖,FP:代表查詢到的不 相似圖,FN:代表未查詢到的相似圖,
TN:代表未查詢到的不相似圖。
首先以商標圖作比較實驗,有八類變
化彩色圖,各類一百張,變化種類包含 Contrast( 對 比 ) 、 Distortion( 變 形 ) 、 Hue( 色相) 、Luminance(亮度)、Noise(雜 訊)、Region(區塊)、Rotation(旋轉)、Scale(影 像大小)
以不同的變化圖找出原始圖,重複實 驗 100 次,第一張就傳回正確的正確率,
其結果如表 I及圖 十四,在對比與影像大 小的正確率都達到 70%,且都比 MCM 高 了 50%的機率,其他每一類都高 MCM 約 30%的機率,由於 MCM 的紋理樣式值不 足 , 導 致 每 一 類 平 均 正 確 率 只 有 10%~30%,最值得一提的是雜訊影像實驗 結果顯示,本方法使用 Sobel 可以抑制雜 訊干擾,因此有顯著的效果。
表 I
正確率(precision)
precision 方法名稱 MCMSobel-CM Contrast 22% 71%
Distortion 20% 56%
Hue 24% 58%
Luminance 32% 61%
Noise 1% 37%
Region 9% 41%
Rotation 1% 30%
Scale 23% 70%
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Contrast Distortion
Hue Luminance
Noise Region
Rotation Scale
MCM
Sobel- CM
圖 十四:正確率(precision)
以不同的變化圖找出原始圖,重複實 驗 100 次,前十張傳回正確的查詢率,其 結果如表 II及圖十五,只有區塊和旋轉查 詢率低於 70%,其他類接近 80%或超過 80%的機率被找回來,在變形、色相、亮 度的影像中,本文的方法比 MCM 高了 10%,其他類則高了 20%~30%以上,
表 II 查詢率(recall)
recall 方法名稱 MCM Sobel-CM Contrast 54% 81%
Distortion 71% 81%
Hue 63% 76%
Luminance 73% 87%
Noise 14% 80%
Region 42% 65%
Rotation 24% 43%
Scale 57% 82%
0 0.2 0.4 0.6 0.8 1
Contrast
Distortion Hue Luminance
Noise Region
Rotation Scale
MCM
Sobel- CM
圖十五:查詢率(recall)
以下是本文提出的方法與 MCM 在灰 階紋理圖的實驗,共有 1776 張紋理圖,一 組同類的紋理相似圖有 16 張,即有 111 種紋理,重複實驗 1776 次,結果如正確率 (precision)表 III、圖 十六所示,本研究第 一張就傳回正確的正確率 95%,MCM 64%。查詢率(recall)表 IV及、圖 十七所 示,本研究在前 40 張就能傳回 84%的相
似圖,MCM 僅有 48%,足以說明本研究 採用的紋理特徵值可得到較有效的查詢結 果。
表 III 正確率(precision)
張
數 1 3 5 20 40
MCM 64% 59% 55% 51% 48%
方 法 名
稱 Sobel-CM 95% 92% 89% 87% 84%
圖 十六:正確率(precision)
表 IV 查詢率(recall)
張
數 1 3 5 7 9
方
法 MCM 4% 12% 18% 47% 58%
前N張的查詢率
0 0.2 0.4 0.6 0.8 1
1 2 3 4 5 10 20 30 40 50
MCM Sobel- CM
圖 十七:查詢率(recall)
第N張的正確率
0 0.2 0.4 0.6 0.8 1
1 2 3 4 5 6 7 8 9 10
MCM Sobel- CM
以下是本研究與 MCM 針對建築 物圖的查詢實驗,共有 167 張大自然 和素材圖,樹林、樹叢、樹皮、樹枝、
樹葉、瓷磚和建築、油畫和水彩畫、
以及大豆小豆等,不僅顏色相近,甚 至紋理都是一格一格、一顆一顆、一 條一條的,還有一些看起來不相似的 圖參雜其中,提高了查詢的困難度,
結果如正確率(precision)表 V、圖 十 八所示,本研究第一張傳回正確的正 確率 66%,而 MCM 僅僅 34%。
表 V 正確率(precision)
張
數 1 3 5 7 9
MCM 34% 26% 21% 18% 16%
方 法 名
稱Sobel-CM 66% 40% 33% 27% 23%
圖 十八:正確率(precision)
在建築物的資料庫中,重複實驗 167 次,結果如查詢率(recall)表VI及 圖 十九所示,本研究前 40 張傳回正 確的機率為 82%,而 MCM 只有 74%。
表 VI 查詢率(recall)
張
數 1 3 5 20 40
MCM 13% 23% 29% 54% 74%
方 法 名
稱 Sobel-CM 26% 38% 47% 68% 82%
前N張查詢率
0 0.2 0.4 0.6 0.8 1
1 2 3 4 5 10 20 30 40 50
MCM Sobel-CM
圖 十九:查詢率(recall)
五、結論
本研究所提出的影像查詢技術使用 Sobel 邊緣偵測、邊緣樣式共相關矩陣以 及顏色直方圖,不僅包含邊緣的紋理與空 間關係的特徵,也具備顏色複雜度的特 徵,可以抵抗影像多項變異,舉凡對比、
變形、色相、亮度、雜訊、區塊、旋轉、
影像大小等變異,都能有效查詢。對於灰 階紋理圖的查詢結果,則更為準確,可達 到以最少傳回張數,將所有相似圖都傳 回。與 MCM 相比較,由於 MCM 的紋理 樣式少,且無法抵抗雜訊,甚至是非主體 的多餘線條,都會影響到結果。相較於 MCM 來說,本研究所提出的影像查詢系 統有較佳的的正確率與查詢率
六、參考文獻
[ 1 ] M.Adoram,and M.S.Lew,“IRUS : Image Retrieval Using Shape,”IEEE International 第N張正確率
0 0.2 0.4 0.6 0.8
1 2 3 4 5 6 7 8 9 10
MCM Sobel-CM
conference on Multimediz Computing and System, 2, pp. 597-602,1999
[2] C. S. Fuh, S. W. Cho, and K. Essig,
“Hierarchical Color Image Region Segmentation for Content-Based Image Retrieval System,” IEEE Transactions on Image Processing, Vol. 9, No. 1, pp. 156-162.
[ 3 ] P.Chang,J.Krumm,“ObjectRecognition with Color Co-occurrence Histograms,” IEEE Computer Society Conference on CVPR, Vol. 2, pp. 498-504, 1999.
[ 4 ] Y. K. Chan and C.C.Chang,“A Color Image Retrieval System Based on the Run-Length Representation,” Pattern Recognition Letter, Vol.18, Issue:5, Apr.2001, pp. 447-455.
[ 5 ] J.M.Fuertesand M.Lucena,“A Schemeof Colour Image Retrieval from Databases,” Pattern Recognition, Vol. 22, pp. 323-337, 2001.
[ 6] M.Flickner, H.Sawhney , W. Niblack.,J.Ashley., Q. Huang, M. Dom B.,Gorani, J. Hafner, D.
Lee, D Petkovic., D. Steele, and P.Yanker,
“Querying by Image and Video content: The QBICSystem,” IEEE Transactions on Computer, Vol. 28, No.9, pp. 23-32,1995.
[ 7 ] J. Huang, Kumar, S. R., Mitra, M., Zhu, W. J., and Zabih, R. ,“Image Indexing Using Color Correlograms,” Proc. 16th IEEE conf. on Computer Vision and Pattern Recognition, pp.762-768, 1997.
[ 8 ] J. Huang, Kumar, S. R., Mitra, M., and Zhu, W.
J., “Spatialcolor indexing and applications,” Proc. 8th Intl. Conference on Computer Vision, pp. 245-268, 1999.
[ 9 ] N.Jhanwar et al., “ContentBased Image Retrieval Using Motif Cooccurrence Matrix,”
Image Vision Computing, Vol. 22, pp.
1211-1220, 2004.
[ 10 ] J. Krumm and S. A. Shafer, “Texture Segmentation and Shape in theSameImage,” The Fifth International Conference on Computer Vision, Cambridge, MA, USA, Vol. 1, pp.121-127, 1995.
[ 11 ] V.Kovalev,S.Volmer,“ColorCo-occurrence Descriptor for Querying-by-Example,”
Multimedia Modeling, pp. 32-38, 1998.
[12] J. M. S. Prewitt, “Object Enhancement and Extraction,” in Picture Procession and Psychopictorics, Lipkin, B. S., and Rosenfeld, Academic Press, New York, 1970.
[13] L. G. Roberts, “Machine Perception of Three-Dimensional Solids,” in Optical and Electro-Optical Information Processing, Tippet,J.T.(ed.), MIT Press, Cambridge, Mass.
[14] I.E.Sobel, “Camera Models and Machine Perception,” Ph.D.dissertation, Standford University, Palo Alto, Calif. 1970.
[15] M. Swain and D. Ballard, “Color Indexing,” International Journal of Computer Vision, Vol.
7, No. 1, pp. 11-32, 1991.
[16] Seong-O Shim and Tae-Sun Choi, “Image Indexing by Modified Color Co-occurrence matrix,” Proceedings of International Conference on Image Processing, Vol. 3, pp.
493-496, 2003.