國立臺灣大學工學院機械工程學研究所 碩士論文
Graduate Institute of Mechanical Engineering College of Engineering
National Taiwan University Master Thesis
微型可重構式超精密光學干涉儀之研製 Development of a Micro Reconfigurable
Ultra-Precision Interferometer
鍾一正
Chung, Yi-Cheng
指導教授:范光照 博士 Advisor: Fan, Kuang-Chao, Ph.D.
中華民國一百年七月
July, 2011
誌謝
轉眼間在台大六年的求學生涯已接近尾聲,在台大和精密量測實驗室的生活 中讓我獲益良多。我也終於能以拙作一本,來感謝所有直接或間接幫助我完成學 業的師長、朋友們。
首先我要謝謝恩師范光照老師,老師對於研究的執念、做事的態度等深深了 影響我,並給予我充份的信任和研究資源來完成論文內的研究;同時也要感謝口 試委員陳亮嘉教授和朱志良教授,為我的論文提供了許多寶貴的意見;另外要感 謝的是北京清華大學的曾理江教授,為本研究提供了非常珍貴的二維光柵,讓我 的研究順利許多;還有現在在新加坡的程方博士,解決了我許多關於干涉儀架設 和原理層級的問題。
感謝許多學長在我研究的過程中為我解惑:首先是博正學長,教導了我許多 干涉儀的知識和技術、同時傳授了許多實驗室以前碰過的問題和解決方法,沒有 學長就沒有這篇論文;博班學長智遠、守恆、希銘在各個領域的經驗和技術的指 導讓我少了許多獨自摸索的困擾;感謝碩班學長家佑、順洋、睿程、志遠、家葦、
昇宜、韋廷無論是在研究或是在生活上的鼓勵與支持;特別要感謝的是助理雅淑,
為實驗室的眾人處理麻煩的行政事務,讓我們能全心攻讀學位。
此外,同窗好友綜漢、俊寬、亦凱、敏威和世將等在研究所的兩年內無論是 學術問題的切磋成長、或是生活上的吃喝玩樂都讓我覺得很幸運有這麼合得來的 同學,在此感謝他們,我也將會很懷念這段相處的日子。還要感謝學弟柏勛、仲 豪、志雄、兆民等帶來實驗上的幫助與生活上的歡笑,也預祝你們學業順利。
感謝好友大頭、耕宇、陳昀、昕至、品嵐、臉兒、阿嚕、珊米等很多很多老 朋友以及快槍、牛角、蘇噴、阿乾、柚子、老虎、桂格、民俗、拉布布、低洨等 許多在大學時認識的朋友們,與你們共同打拼、一起玩樂、一起歡笑、分享生活 點滴的過程是我攻讀學位時的精神糧食。
最後要感謝我最愛的爸媽、姊姊在這些日子全力的支持與鼓勵,讓我能無後 顧之憂的研究學問;還有女友巧雯充分地包容和不求回報地陪伴我這個工作狂。
另外,在此感謝所有我前面沒有提到、卻正面地影響我或這篇論文的人,希望能 與你們一同分享我的成果與喜悅。
民國一百年仲夏 於台大
摘要
隨著半導體產業、微電子產業、微生物產業等小尺度工程的發展,許多奈米 級的加工、定位、量測系統都有賴於超精密的感測器技術;然而,想要同時達到 大量程與高解析度的代價不僅昂貴、體積龐大而且容易受到環境影響。因此,本 研究主旨為解決上述問題並研發低成本、高精度、大量程、工藝技術簡單且不受 環境影響的感測器。
在工業上,雷射干涉儀的使用加強了系統精度的可靠性,但雷射干涉儀受限 於價格和體積,並不適合嵌入一般儀器中做為感測器使用。本研究基於同樣的干 涉原理,將精密干涉儀微小化並簡易化成可在工程上實用的感測器,並加強安裝 時的寬鬆性,不造成使用上的障礙。
為 了 達 到 上 述 的 目 的 , 本 研 究 提 出 一 種 多 工 式 干 涉 模 組(versatile interferometric module, VIM)做為感測器的核心元件,利用偏極化光學理論和四通 道光感測器陣列來優化系統的性能。搭配上不同的平面鏡並偏折光路即可實現許 多不同的量測方式及量測範圍。在訊號處理方面,提出了硬體電路和軟體演算法,
進行前級訊號修正、後級訊號即時處理、訊號計數、細分割等動作,為一通用式 的訊號解析模組。
整套感測器系統可快速重構成麥克森干涉儀(PMI)、雙角度干涉儀(PYAI)、抗 偏擺式角度干涉儀(ADAI)、線性光柵尺(LDGI)或平面光柵尺(PDGI)。各種位移感 測器的精度經實驗驗證後都優於 27 nm,量測範圍最高可以達到兩個方向各 50 mm;角度感測器在定距離量測時精度為 0.25 arcsec,當量測鏡進行長距離之線性 運動時,量測精度也都優於1 arcsec。
關鍵字:重構性能、光柵干涉儀、角度干涉儀、超精密量測、微小化感測器
ABSTRACT
Nowadays, in pace with the development of semiconductor, micro-electronic and biological industries, many micro/nano manufacturing, positioning and metrology depend on the technologies of ultra-precision sensor. However, to achieve large metrology range and high resolution is not only an expensive, bulky but an environmental dependent task. As a result, the main contribution of this thesis is to solve the above paradox and develop a low cost, high accuracy, large metrology scale, compact and free of environmental effect sensor scheme.
Laser interferometers provide the reliability of the accuracy of the instruments in industrial use, but the size and cost make them almost impossible to be embedded into the system as sensor. Based on the same metrology principle, our research makes efforts in minimizing and simplifying the interferometer as a practically useful sensor in industrial use.
To achieve the above-mentioned goal, we present a versatile interferometric module as the core of our sensor. By applying the polarizing theory and four-detector-array, the performance of the sensor can be optimized. It can be reconfiguring to a number of metrology way and measurement range by adopting different sets of plane mirrors. This research also presents a general scheme of signal processing by mixing a hardware circuit and a software algorithm, proceeding pre-correction, real-time compensation, wave count and interpolation of the metrology signal.
The whole sensor scheme can rapidly reconfigured into polarizing Michelson interferometer, pitch-yaw angle interferometer, anti-deflection angle interferometer, linear diffraction grating interferometer and planar diffraction grating interferometer.
The accuracy and the measurable range of the three displacement sensor are experimentally testified to be better than 27 nanometers and 25 millimeters in two directions. The angular accuracy of the angle sensors are 0.25 arcsec in static measurement and 1 arcsec in large linear motion measurement.
Keywords: Reconfigurable scheme, Grating interferometer, Angle interferometer, Ultra-precision metrology, Miniature sensor
目錄
誌謝...i
摘要... ii
ABSTRACT ... iii
目錄...iv
圖目錄... vii
表目錄... xii
第一章 緒論...1
1-1. 研究動機與目的 ...1
1-2. 參考文獻回顧 ...3
1-2-1. Homodyne interferometer ...3
1-2-2. Grating interferometer...6
1-2-3. Heterodyne interferometer ...10
1-3. 研究方法與內容概要 ...13
第二章 干涉儀之量測原理 ...14
2-1. 量測原理 ...14
2-2. 光路設計原理 ...15
2-2-1. 核心概念...15
2-2-2. 干涉之對比度...17
2-2-3. 幾何公差概念...19
2-3. 系統元件 ...20
2-4. 多工式干涉模組之研製 ...22
2-4-1. 瓊斯運算...24
2-4-2. VIM 機械夾持具設計 ...28
2-5. 訊號處理 ...30
2-6. 小結 ...33
第三章 雷射單頻干涉儀 ...35
3-1. 微型麥克森干涉儀 ...35
3-1-1. 偏極化麥克森干涉儀...35
3-1-2. 公差分析...37
3-1-3. 量程與精度實驗...38
3-1-4. 穩定度與解析度實驗...41
3-2. 平面鏡式角度干涉儀 ...44
3-2-1. 光路原理與公差分析...44
3-2-2. 精度驗證...47
3-2-3. 雙角度干涉儀...48
3-2-4. 雙角度比對實驗...49
3-3. 抗偏擺式角度干涉儀 ...51
3-3-1. 光路原理與公差分析...51
3-3-2. 固定工作距離之精度實驗...54
3-3-3. 長行程線性運動時之比對實驗...55
3-4. 小結 ...56
第四章 光柵干涉儀 ...60
4-1. 光柵干涉術 ...60
4-1-1. 都卜勒效應...60
4-1-2. 光柵繞射與都卜勒頻移...62
4-2. 線性光柵尺 ...65
4-2-1. 光路原理...65
4-2-2. 幾何公差探討與驗證...66
4-2-3. LDGI 性能測試 ...71
4-3. 平面光柵尺 ...75
4-3-1. 平面光柵製作...76
4-3-2. 光路原理...78
4-3-3. 二維軌跡補償模型...81
4-3-4. PDGI 性能測試 ...87
4-4. 小結 ...90
第五章 誤差分析 ...94
5-1. 誤差來源 ...94
5-2. 架設誤差 ...95
5-3. 儀器誤差 ...96
5-4. 環境誤差 ...101
5-5. 小結 ...103
第六章 結論...104
6-1. 研究成果 ...104
6-2. 未來展望 ...106
參考文獻...107
圖目錄
圖 1-2.1 Pan Shi 和 Erik Stijns 設計的角度干涉儀 ...4
圖 1-2.2 Liu 等人設計的微位移干涉儀...4
圖 1-2.3 以 HOE 為基礎發展的角度干涉儀 ...5
圖 1-2.4 上海理工大學提出使用特殊稜鏡之干涉儀 ...5
圖 1-2.5 天津大學提出八倍頻耦合差動式單頻干涉儀 ...6
圖 1-2.6 台大應力所研發之 DiLENS 光學架構示意圖 ...7
圖 1-2.7 高偉等人提出之三軸感測干涉儀架構圖 ...7
圖 1-2.8 Kimura 等人提出之二維光學尺光路結構示意圖 ...8
圖 1-2.9 范光照等人提出之準直入射式干涉儀 ...8
圖 1-2.10 范光照和李博正提出準直入射式平面光柵干涉儀 ...9
圖 1-2.11 高清芬等人提出之共軛式光柵干涉儀 ...9
圖 1-2.12 Menq 等人提出高公差之平面鏡干涉儀...10
圖 1-2.13 鄭德鋒等人提出之雙稜鏡角度干涉儀架構 ...11
圖 1-2.14 美國 JPL 提出太空觀測用超精密角度干涉儀之整體架構 ...11
圖 1-2.15 準共光程外差光柵干涉儀之外差光源 ...12
圖 1-2.16 準共光程外差光柵干涉儀之核心光路 ...12
圖 2-1.1 Michelson 干涉儀光路架構 ...15
圖 2-2.1 光柵干涉儀偏擺時之光路誤差 ...17
圖 2-2.2 變光程量測之 head-to-scale 幾何對位關係圖...19
圖 2-2.3 等光程量測之 head-to-scale 幾何對位關係圖...20
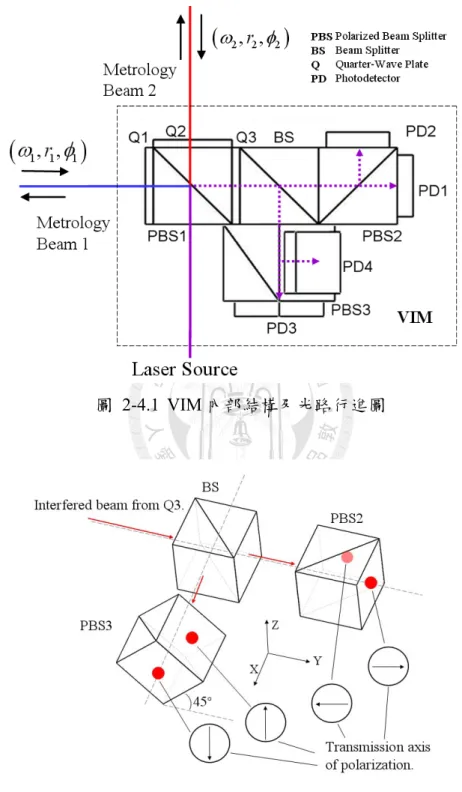
圖 2-4.1 VIM 內部結構及光路行進圖 ...23
圖 2-4.2 Q3 後的光路架構與極化狀態 ...23
圖 2-4.3 VIM 機械夾持具設計圖與實體照片 ...28
圖 2-4.4 以 VIM 構成 Michelson 干涉儀...29
圖 2-4.5 以 VIM 構成角度干涉儀 ...29
圖 2-4.6 以 VIM 構成光柵干涉儀 ...29
圖 2-5.1 利薩圓訊號狀況 ...30
圖 2-5.2 前級訊號處理電路 ...31
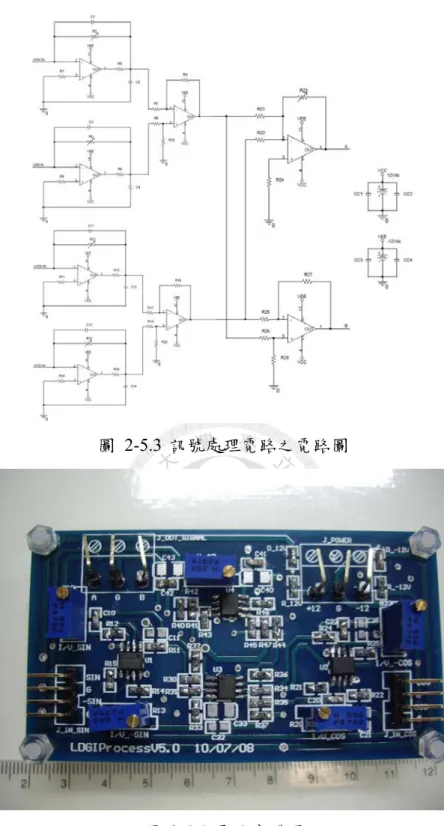
圖 2-5.3 訊號處理電路之電路圖 ...32
圖 2-5.4 電路實體圖 ...32
圖 2-5.5 軟體運算架構 ...33
圖 3-1.1 PMI 架構圖 ...35
圖 3-1.2 兩組 PMI 之實體圖 ...36
圖 3-1.3 光路偏擺對 PMI 的影響 ...37
圖 3-1.4 PMI 量程實驗架設 ...38
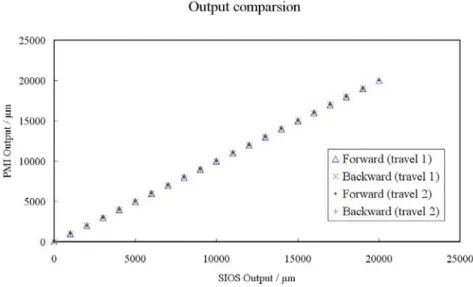
圖 3-1.5 PMI 與商用雷射干涉儀長行程比對 ...39
圖 3-1.6 PMI 精度實驗架設 ...39
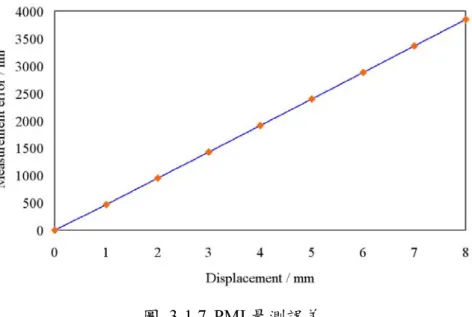
圖 3-1.7 PMI 量測誤差 ...40
圖 3-1.8 各次行程之擬合殘差 ...40
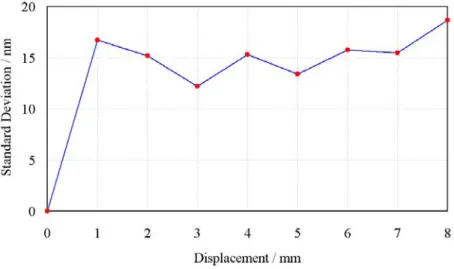
圖 3-1.9 PMI 之標準差曲線 ...41
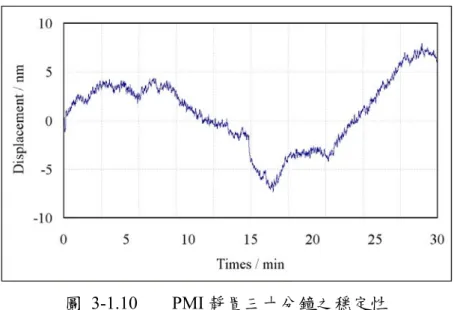
圖 3-1.10 PMI 靜置三十分鐘之穩定性 ...42
圖 3-1.11 PMI 於 20 秒內之原始數據 ...43
圖 3-1.12 PMI 之殘留電子雜訊 ...43
圖 3-2.1 PAI 架構圖 ...44
圖 3-2.2 角度干涉儀量測原理示意圖 ...45
圖 3-2.3 角度偏擺對 PAI 造成的影響 ...46
圖 3-2.4 PAI 工作距離與角度公差之關係 ...46
圖 3-2.5 與 HP5529A 進行精度比對實驗 ...47
圖 3-2.6 PAI 與 HP5529A 在固定距離的角度量測比對 ...48
圖 3-2.7 PAI 之固定距離的角度量測誤差 ...48
圖 3-2.8 PYAI 光路圖 ...49
圖 3-2.9 PYAI 架設於微型工具機 ...49
圖 3-2.10 PYAI 與 HP 5529A 在線性移動時之雙角度量測比對...50
圖 3-2.11 PYAI 在線性移動時之量測誤差 ...50
圖 3-3.1 角偶稜鏡抗偏擺原理 ...52
圖 3-3.2 ADAI 光路 ...52
圖 3-3.3 Aperture 作為空間濾波示意圖 ...52
圖 3-3.4 ADAI 架構圖 ...53
圖 3-3.5 ADAI 之讀取頭與角偶稜鏡組之實體照片 ...54
圖 3-3.6 ADAI 與 HP 5529A 輸出數值比對 ...54
圖 3-3.7 ADAI 之量測誤差 ...55
圖 3-3.8 長行程比對實驗架設 ...55
圖 3-3.9 行程約八十公分之滑軌角度誤差量測 ...56
圖 3-3.10 ADAI 長行程量測誤差 ...56
圖 3-4.1 台大精密量測實驗室所開發之多波長顯微系統簡易架構圖 ...58
圖 3-4.2 台大精密量測實驗室所開發之五自由度感測器 ...59
圖 4-1.1 簡易光柵干涉儀之架構 ...60
圖 4-1.2 單一都卜勒效應 ...61
圖 4-1.3 雙重都卜勒效應 ...62
圖 4-1.4 光柵繞射示意圖 ...63
圖 4-1.5 光柵移動時之都卜勒效應 ...63
圖 4-2.1 LDGI 光路架構及實體照片...66
圖 4-2.2 運動誤差造成 PD 上光點移動 ...66
圖 4-2.3 傳統光柵干涉儀與 LDGI 之遠離公差示意圖...67
圖 4-2.4 傳統光柵干涉儀與 LDGI 之偏航公差示意圖...68
圖 4-2.5 光柵俯仰運動時對繞射光之影響 ...68
圖 4-2.6 公差實驗架設示意圖 ...69
圖 4-2.7 LDGI 幾何公差實驗-偏航 ...70
圖 4-2.8 LDGI 幾何公差實驗-翻滾 ...70
圖 4-2.9 LDGI 幾何公差實驗-俯仰 ...71
圖 4-2.10 LDGI 性能驗證實驗架構...71
圖 4-2.11 LDGI 之平均誤差...72
圖 4-2.12 最小平方法修正餘弦誤差後之誤差統計 ...72
圖 4-2.13 LDGI 讀取平台進行 20nm 之往復運動...73
圖 4-2.14 LDGI 讀取平台進行長行程金字塔形運動...74
圖 4-2.15 LDGI 之穩定度實驗...74
圖 4-2.16 LDGI 於 20 秒內之量測數據...75
圖 4-2.17 殘留之電子雜訊 ...75
圖 4-3.1 光罩曝光法製作之平面計量光柵 ...77
圖 4-3.2 干涉曝光系統架構 ...77
圖 4-3.3 光柵實體照片 ...78
圖 4-3.4 平面光柵初步驗證實驗 ...78
圖 4-3.5 PDGI 光路架構...79
圖 4-3.6 PDGI 光學讀取頭之實體照片...79
圖 4-3.7 PDGI 讀頭與光柵之對位關係...80
圖 4-3.8 PDGI 無系統誤差之情形...82
圖 4-3.9 存在旋轉角誤差時之情形 ...83
圖 4-3.10 存在傾斜角誤差時之情形 ...83
圖 4-3.11 光柵結構正交誤差時的情形 ...83
圖 4-3.12 軌跡校正流程 ...84
圖 4-3.13 模擬之軌跡情形 ...85
圖 4-3.14 軸交正規化處理 ...85
圖 4-3.15 X 方向之正規化處理 ...86
圖 4-3.16 Y 方向之正規化處理 ...86
圖 4-3.17 補償前後之軌跡比較 ...87
圖 4-3.18 PDGI 性能驗證實驗架設...87
圖 4-3.19 PDGI 之 x 方向精度實驗...88
圖 4-3.20 PDGI 之 y 方向精度實驗...88
圖 4-3.21 PDGI 量測 100nm 階梯運動...89
圖 4-3.22 PDGI 量測 4mm 之階梯運動...90
圖 4-4.1 台大精密量測實驗室所開發之奈米級高度計 ...92
圖 4-4.2 台大精密量測實驗室所開發之內螺紋導程誤差檢測儀 ...92
圖 4-4.3 台大精密量測實驗室所開發之共平面平台 ...93
圖 4-4.4 氣浮平台之架構圖 ...93
圖 5-1.1 誤差來源 ...94
圖 5-2.1 阿貝誤差 ...95
圖 5-2.2 二維光柵與平台間的餘弦誤差 ...96
圖 5-3.1 溫度變化導致雷射跳模現象 ...97
圖 5-3.2 光柵表面平整度不佳之狀況 ...100
圖 5-3.3 平面反射鏡之鬼影現象 ...100
表目錄
表 1 兩種雷射關鍵參數總覽...21
表 2 系統光學元件...21
表 3 本研究中的瓊斯表示法...24
表 4 PMI 各自由度公差 ...38
表 5 PAI 工作距離為 100 mm 時之容忍公差...47
表 6 ADAI 之幾何公差 ...53
表 7 PMI 規格整理 ...57
表 8 PAI 與 PYAI 規格整理 ...57
表 9 ADAI 規格整理 ...58
表 10 LDGI 之幾何公差...69
表 11 LDGI 精度性能整理...73
表 12 PDGI 之容忍公差...81
表 13 PDGI 精度性能整理...89
表 14 LDGI 規格整理...91
表 15 PDGI 規格整理...91
表 16 誤差總整理...103
第一章 緒論
1-1. 研究動機與目的
隨著精密工業、微電子技術及生物技術的快速發展,使得感測器的發展目標 朝向小型化、高精度、奈米級解析度,且現場環境的適應能力須要變得更強,以 達到工程應用之實用性。
以位移的量測為例,在高精度的量測環境下,接觸式量測方法存在之缺陷在 於:任何微小的接觸力引起之變形在微觀的世界可能造成極大的誤差,導致其不 確定度飆昇,所以必需使用非接觸式的量測方法。目前,進行非接觸式奈米級位 移量測方法主要有:非光學方法和光學方法兩大類,前者包括電感及電容測微法,
後者則包括各種形式的雷射干涉法。在非光學方法中電感及電容測微法雖然具有 高解析度,但量測長度過短,通常在微米級的場合使用;商用雷射干涉儀具有奈 米級的解析度且較大的量測範圍,可是價格昂貴、體積龐大,多用在實驗室場合 或作校正用途,並不適合整合進商用機台中作為感測器用。
綜觀一般具有奈米解析度的位移感測器中,電感及電容感測法無法具有長行 程;雷射干涉法結構龐大複雜,且價格昂貴並容易受到環境的影響,因此奈米級 位移感測器的行程增長、簡易化、低成本、高解析、不易受環境影響等是量測科 技中重要的方向。
雷射的發明改寫了無數的光學量測方法,而受惠於CD/DVD 工業的風行,二 極體雷射現今價格已十分低廉,市面上很容易取得各式模組化的二極體雷射。本 研中,將二極體雷射搭配上多功能干涉模組(VIM)可以達成微型、便宜、結構強壯、
多樣功能等優勢之干涉系統,這些優點使干涉儀被簡化成具有實際工程應用的潛 力的微小感測器(miniature sensor)。使用 VIM 的好處是 VIM 結合了干涉儀的分光、
接收、相位編碼等功能,並且可以重構成不同用途的干涉儀;舉例來說,藉由外 部反射鏡偏折光路即可達成平面鏡之遠離位移、偏擺角度、光柵之線性位移或平 面光柵之平面運動等自由度的感測,因此以下分成定位感測和角度偏擺感測兩個 方向來探討研究動機。
A. 奈米定位感測
現今奈米級量測技術正由點量測向面量測過渡中,由長度的精密量測擴展至 形狀之精密量測是重要的目標,而這有賴於長行程且具高解析度與準確度的平面 量測。在傳統的平台位移量測上,高準確度-短行程者採用撓性連桿懸移機構、壓 電驅動器與電容式感測器整合,雖具有高解析度與準確度,但行程難以拉長;高 準確度-長行程者則是將一組高準確短行程的模組架在另一組中低精度長行程的模 組上,雖然拉長行程,但準確度卻難以提高。
平面位移平台傳統上的結構採用正交式或龍門架式兩種形式。這些平台的結 構,在驅動、導引、和量測上兩垂直軸是獨立分離的,系統的複雜度很高,在精 密定位的控制上,系統動態的穩定性也很困難,兩軸間正交的精度、感測器與感 測面間的平行度、干涉儀與平台間的幾何對位關係等問題在要求高精度之系統中 都非常難以克服。
光學編碼器(optical encoder)即為一種位移感測器,而光柵(grating)為光學尺系 統的主要應用元件。若能採用光柵作為分光元件,使其產生繞射光進而產生干涉,
就構成「光柵干涉儀」,如此,利用光柵刻劃的間距來定量位移,與光源的波長無 關,不需要穩頻之光源,不但大大降低成本,也能減少環境因素對儀器產生的影 響。除了利用光柵刻劃的間距來定量位移,使用雷射波長做為計量依據的雷射干 涉儀(laser interferometer)也很常見於定位感測用。
本研究基於VIM 和二極體雷射的應用提出三種測長干涉儀:偏極化麥克森干 涉儀(polarizing Michelson interferometer, PMI),適合量測小行程位移;雷射繞射干 涉儀(laser diffraction grating interferometer, LDGI),適合量測長行程之線性位移;平 面光柵干涉儀(planar diffraction grating interferometer, PDGI),適合量測奈米級解析 度之平面運動。
B. 角度偏擺感測
精密運動平台是利用裝置於各移動軸的位移感測器,即時迴授動態位置至控 制器以控制加工路徑的位移與速度,達到精密定位的功能,其在每個軸之運動方 向具有六個自由度誤差,分別為一個定位誤差、兩個真直度誤差及三個角度誤差,
又稱為幾何誤差。以工具機為例,此誤差量造成實際切削點位置和位移感測器所
顯示的位置值不同,由角度誤差所造成的偏位即所謂的阿貝誤差(Abbé Error,【1】),
由直度誤差所造成的偏位即所謂的布萊恩誤差(Bryan Error,【2】)。一台三軸工具 機共有 21 項幾何誤差,組合各誤差分量在加工體積中則產生空間體積誤差 (volumetric error,【3】【4】)。
由於結構設計的限制,位移感測器所代表的量測軸線和工具機切削刀具在加 工空間的運動軸線常無法同軸,造成定位精度受到角度變化時產生的阿貝誤差影 響。又因角度誤差會因阿貝原則而放大,為影響定位精度之主要成因。總而言之,
若有阿貝偏位的存在時,則線性移動時的角度誤差需要被感測並補償之,以達到 更高精度的系統;因此,量測移動時之角度誤差有其必要性。
本研究基於 VIM 和二極體雷射的應用提出兩種測角干涉儀:雙角度干涉儀 (Pitch-Yaw angle interferometer, PYAI),適合短行程線性運動時,兩個角度誤差的量 度;高公差角度干涉儀(anti-deflection angle interferometer, ADAI),適合量測長行程 線性運動時之角度誤差。
1-2. 參考文獻回顧
光學干涉術在量測領域的使用非常廣泛,可量測許多物理性質如位移、角度、
幾何精度、表面輪廓、物體折射率及膜厚等等。一些較傳統的干涉術使用非同調 光來進行干涉,其發展有限。直到雷射的發明後干涉儀開始運用此高同調性的光 源而蓬勃發展,”雷射干涉儀”一詞開始在各精密工業中出現。雷射干涉儀分成 Homodyne 式和 Heterodyne 式,本研究採用簡單架構的 Homodyne 式發展可偵測目 標位移和角度之干涉系統;同時,為了解決 Homodyne 式干涉儀在實際工程上應 用上的缺陷,提出了光柵式的干涉系統。以下就此三種系統探討近年其他研究者 之文獻回饋。
1-2-1. Homodyne interferometer
現代雷射干涉技術在60 年代後得於快速發展的原因有二:
1. 雷射(Laser,【5】)的發明。
2. 麥克森干涉術(Michelson Interferometry,【6】)的應用。
最早的雷射干涉儀即以雷射做為光源,經過麥克森干涉光路後量測待測鏡的
增量位移,此類干涉儀之量測依據為雷射波長,要求周圍環境處於穩定狀態。此 類以單一頻率光源將待測物的幾何資訊以光程差或角頻差的變化載回干涉現象,
並以光強變化分析運動資訊之干涉儀通稱為 Homodyne 式干涉儀。以下回顧一些 近年值得借鏡之國內外文獻:
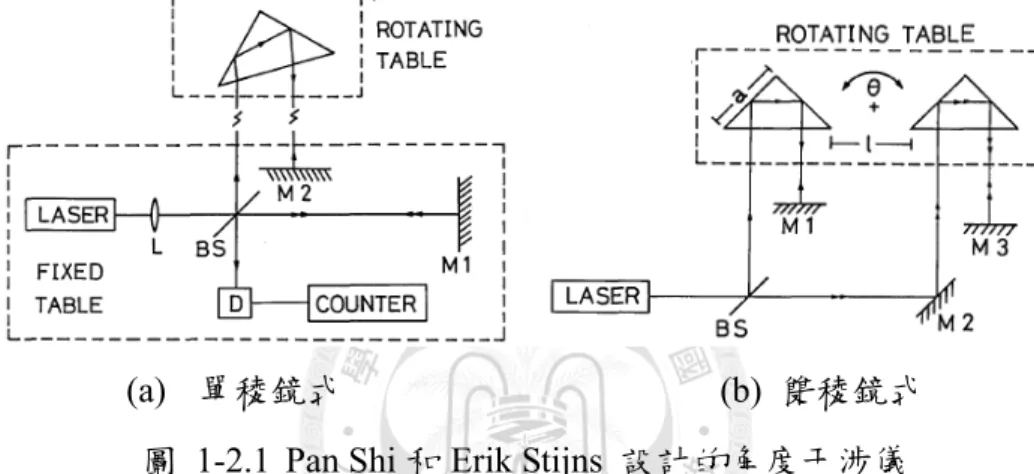
西元1988 年,Pan Shi 和 Erik Stijns 設計一種角度干涉光路,光路圖如圖 1-2.1
【7】。將邁克森干涉術的量測光路中加入了一個直角稜鏡以量測其角度變化;該 光路也可推廣成雙稜鏡架構。使用邊長30 mm 的稜鏡組可以得到高達±5°的量測範 圍,靈敏度約0.4 arcsec。
(a) 單稜鏡式 (b) 雙稜鏡式 圖 1-2.1 Pan Shi 和 Erik Stijns 設計的角度干涉儀
西元2001 年,Liu 和 Clegg【8】等人結合光的偏極理論和單頻干涉技術發明 了一種可在高速下運作的微位移干涉儀,藉由12-bit 的 AD-Converter 進行細分。
理論上的解析度達到0.15 nm,實驗結果顯示其有能力量測 0.8 nm 甚至更微小的位 移。其系統架構如下圖。
圖 1-2.2 Liu 等人設計的微位移干涉儀
西元2003 年,荷蘭 Riso National Laboratory 的 Kitchen 和 Dam-Hansen 發明了 一種新式的干涉光路【9】,傳統干涉儀的干涉鏡全由一種全像光柵式光學元件取 代,同時完成分光和聚焦的工作。藉由此核心技術可以重構出不同用途、精度、
量測範圍的光學干涉儀,具有發展潛力。其提出的角度干涉儀量測靈敏度為 0.05 arcsec,量測範圍則達到 15 arcmin,量測角度的去回光路如圖 1-2.3。
(a) 去程光路 (b) 回程光路 圖 1-2.3 以 HOE 為基礎發展的角度干涉儀
2006 年,上海理工大學王力和侯文玫介紹了一種採用 Koester 和 Wollaston 等 特殊稜鏡的單頻干涉儀系統【10】。系統集成了兩個測長干涉儀,因此具有量測微 小角度的能力;特殊稜鏡的使用則降低了雷射在各個偏振態轉換不全的可能性。
其長期穩定度小於15 nm。
圖 1-2.4 上海理工大學提出使用特殊稜鏡之干涉儀
西元2008 年,天津大學齊永岳等人提出了一種光學八倍頻的耦合差動式單頻 干涉儀,其獨特的光學元件布局自補償了數種量測誤差,系統示意於圖 1-2.5。研 究中逐一分析任何可能的誤差來源而推論出其理論精度為2 nm;與電容位移計比 對的結果得知該干涉儀精度為14 nm【11】。
圖 1-2.5 天津大學提出八倍頻耦合差動式單頻干涉儀
商用的雷射干涉儀系統已廣泛的運用在各種半導體產業和精密工業中。德國 SIOS 公司生產的單頻干涉系統採用光纖耦合氣體雷射和傳統邁克森光路搭配上 DSP 模組。以一款三光束干涉儀為例【12】,其具有量測一個線性位移和兩個旋轉 角度的能力,位移解析度0.1 nm,量測範圍長達 2 m,角度解析度則為 0.002 arcsec,
量測範圍±2 arcmin。
1-2-2. Grating interferometer
光柵的測長技術一開始是基於兩個光柵的Moire fringe 技術(俗稱光學尺【13】
【14】)。由於技術成熟、安裝簡易,此技術非常廣氾的用於各種微米級的定位感 測上;然而,礙於繞射極限,光學尺技術的精度無法突破至奈米等級。為了達到 大量程又具有奈米級的解析度,光柵干涉技術開始有了長足的發展。
光柵干涉儀一般由雷射光源、分光系統及光柵構成,是以光柵的繞射原理作 為理論基礎,將光柵分出的繞射光進行干涉而得知吾人所需要的資訊。由於這些 資訊是搭載在細密的光柵刻劃而非雷射波長,因此避開了雷射光容易受到環境波 動影響的不確定度,也無需導入雷射穩頻技術。以下簡單概述近年的光柵干涉技 術文獻:
西元2002 年,台大應力所李世光等人使用單倍率望遠鏡系統來矯正繞射光的 波前,並結合分光系統和圓偏光干涉儀而研發出新型的雷射繞射光學尺(簡稱 DiLENS【15】【16】)。此光路有效的提高光學讀取頭和光柵間的幾何公差且利用
光的偏極性縮短光路;其微小化的光機總體積約為71 61 30mm× × 3且具有 37.33nm 之量測精度。
圖 1-2.6 台大應力所研發之 DiLENS 光學架構示意圖
西元 2007 年,日本東北大學高偉等人提出一雙光柵式光柵干涉儀【17】,藉 由單一雷射分光後入射參考光柵和計量光柵,同時接收回射光的都卜勒頻移資訊 和光程差資訊。此架構結合了光柵干涉儀和麥克森干涉儀,可同時讀取三個線性 自由度,解析度約5 nm。
圖 1-2.7 高偉等人提出之三軸感測干涉儀架構圖
西元 2010 年,日本東北大學 Kimura 基於雙光柵干涉術研製一兩自由度的光 柵干涉儀,混合計量光柵兩個線性自由度(X 方向位移和 Z 方向的遠離)的干涉訊號 後再經過相位分解的計算程序換算出兩個獨立的位移資訊,解析度達 0.5 nm,非 線性誤差小於±50 nm,且光學讀頭尺寸僅有50 50 30 mm× × 3。此設計之可量測範圍 雖小,其獨特的訊號分離概念卻提供了多自由度干涉儀更多發展空間【18】。
圖 1-2.8 Kimura 等人提出之二維光學尺光路結構示意圖
透過光路的設計,光柵與光學讀取頭間的多個對位公差可以被克服【19】;舉 例來說,范光照、高清芬等人提出數種準直入射式的光柵干涉儀【20】【21】【22】
【23】,其中包含線性光柵尺和平面光柵尺,在完全克服干涉儀系統的遠離(stand off) 公差下,不斷提升干涉儀的量測性能和組裝簡易性,以期達到真正工程應用的層 面。
(a) 準直入射式干涉儀 (b) 李佰堃提出之簡化式光柵干涉儀 圖 1-2.9 范光照等人提出之準直入射式干涉儀
圖 1-2.10 范光照和李博正提出準直入射式平面光柵干涉儀
另一種能有效提升系統公差的光路為逆反射式光路【24】。高清芬等人提出一 系列共軛式光路用於平面光柵之量測【25】【26】,其關鍵技術在於將第一次入射 光產生的數道繞射光經由逆反射打回光柵形成二次繞射,此種設計能有效抗拒光 柵進行平面運動時的角度偏擺(tilt motion),如圖 1-2.11。
圖 1-2.11 高清芬等人提出之共軛式光柵干涉儀
綜觀近年光柵干涉儀的相關研究,主要探討項目有二:(1)藉由光柵可以分光 的 功 能 發 展 多 自 由 度 量 測 , 和 (2) 如 何 在 縮 小 化 的 結 構 下 達 成 高 對 位 公 差 (head-to-scale alignment tolerance)的性能,提高工程使用的實用性。商用的平面光 柵尺現在逐漸能見於世面上【27】,代表其技術有了階段性的發展。
1-2-3. Heterodyne interferometer
Heterodyne 式雷射干涉儀的發明源於美國 HP【28】公司為了要克服 Homodyne 式干涉儀在使用上的種種限制而推出,其基本概念是針對使用穩頻雷射光源,將 雷射光上外差一磁場產生Zeeman 效應【29】而得到雙頻雷射。量測依據由原來的 雷射波長進化為雷射之都卜勒頻移。有別於傳統單頻干涉儀的直流訊號,雙頻干 涉儀的訊號為交流態,將量測的資訊搭載在較高頻的訊號上,擁有較佳的環境適 應性,精度更是提升了一個數量級以上。
本研究主要內容為Homodyne 式和 Grating 式的干涉儀,和 Heterodyne 式干涉 儀有著本質上的不同。然而,許多研究單位所研發之 Heterodyne 式干涉儀,在光 路設計上確實有許多值得借鏡之處,故在此對一些雙頻干涉儀的進行文獻整理。
西元2000 年,Ohio State University 的 Chia-Hsiang Menq 等人提出一種抗偏擺 式平面鏡干涉儀,其特色為在原本角度抗性約為± arcmin 的平面鏡干涉儀架構下1 加入一楔型鏡使量測光臂偏擺,再追加一角偶稜鏡和平面鏡來做全逆反射【33】。
在光路複雜性提升的代價下得到了±3 degree 的角度抗性,解析度則為 0.625 nm,
其特殊光路如圖 1-2.12。此干涉儀可重構成角度干涉儀。
圖 1-2.12 Menq 等人提出高公差之平面鏡干涉儀
2004 年,新竹清華大學吳見明以雙頻光源、避免偏振混合、光路結構對稱等 概念設計具有高度穩定性和無週期誤差的外差干涉儀【31】。系統中採用了直線度 稜鏡和直線度反射鏡來達成直度量測的目的,也可改做為線性量測使用。週期性 誤差由一般干涉儀的數個奈米等級改進至40 pm 以下。
2007 年,中國科學院鄭德鋒等人提出一種使用雙稜鏡的角度干涉儀【32】。其 以正弦方式調整雷射的輸入電流構成一種相位調制式準外差干涉儀,待測鏡則是 由兩個直角稜鏡構成,並導入PSD 的技術精確的測定兩測量臂的平行間距。整個 干涉儀系統在小角度內的量測重複性可達0.002 arcsec。
圖 1-2.13 鄭德鋒等人提出之雙稜鏡角度干涉儀架構
2007 年中央大學李朱育等人提出準共光程外差光柵干涉儀的概念【33】【34】
【37】,系統包含一電光調制外差光源、穿透式光柵和鎖相放大器來量測光柵的位 移。理論上,系統的解析度可分辨至一個pm,但在高頻雜訊的限制之下系統的解 析度約為 0.2 nm。此系統隨後將穿透式光柵改為反射式光柵,成功研製同時具備 奈米精度和公分等級的干涉系統,並將其運用於伺服平台的定位回饋感測器。
2010 年,加州理工 Jet Propulsion Laboratory 的 Inseob Hahn 等人提出了一種雙 頻角度干涉儀【35】。光纖耦合雙頻氣體雷射導入真空腔體後,藉由邁克森干涉術 針對望遠鏡上平面鏡的旋轉角資訊進行量測,其靈敏度約為2 10× −5arcsec,可量測 範圍則落在±30 arcsec 內;整體架構如圖 1-2.14。
圖 1-2.14 美國JPL 提出太空觀測用超精密角度干涉儀之整體架構
2011 年中央大學李朱育等人基於準共光程外差光柵干涉儀的理論下將原本的 一維光柵改成二維結構光柵,並採用聚焦光路使得雷射光在通過光柵後形成數個 干涉區域【36】。藉由量測各個干涉區域的相位變化換算成兩個線性方向的位移,
因此可用於量測x 方向移動時 y 方向的直線度誤差,或是 y 方向移動時 x 方向的 直線度誤差。系統解析度約1.3 nm。其架構如圖 1-2.15、圖 1-2.16 所示。
圖 1-2.15 準共光程外差光柵干涉儀之外差光源
圖 1-2.16 準共光程外差光柵干涉儀之核心光路
事實上,商用雙頻雷射干涉儀在工程場合的使用已有數十年之久,其高精度、
長量程及高穩定性的優點目前還是無法取代。儘管雙頻雷射干涉儀具有以上之優 點,但其體積和價格往往令人卻步,故現今雙頻雷射干涉儀主要是作為校正器而 非感測器使用。本研究所發展的微型單頻干涉儀和光柵干涉儀之優勢有三:製造 成本低廉、儀器體積微小、組裝工藝簡單,適合直接在精密機械中擔任回授傳感 器使用,這就與商用雙頻雷射干涉儀之校正使用有所區別了。
1-3. 研究方法與內容概要
本研究內容主要特點在於:
1. 思考干涉儀直接用於工程上作為感測器使用需要的技術性突破。
2. 研製一種可重構式干涉架構,具有微小、工藝門檻低、模組化的優勢,脫離傳 統干涉儀研究局限於光學桌上之思維。
3. 加強光學讀頭與待測鏡組間的幾何對位公差,提昇干涉儀在各種狀況的適應 性,並進一步擴展干涉儀之可量測範圍。
4. 探討干涉儀訊號的誤差,提出結合硬體和軟體的訊號修正模式以確保量測的精 度和準確性等性能。
5. 實際將干涉儀運用在許多系統如工具機補償系統、三次元量測儀的定位傳感 器、氣浮平台的平面光學尺等等。
論文架構共分為六章
第一章:說明研究動機、歷史回饋以及研究的架設規劃。
第二章:介紹干涉儀原理並提出一種可重構干涉模組。
第三章:基於可重構干涉模組研製模組化微型感測器,量測待測物的位移或角度。
第四章:基於可重構干涉模組研製模組化光柵感測器,量測光柵位移產生之頻移。
第五章:將前面所提到的系統進行誤差分析
第六章:討論研究成果並對全文下總結,同時提出未來發展方向。
第二章 干涉儀之量測原理
當兩個或兩個以上的光波在某個空間中相遇,因為波與波的疊加引起光強度 重新分配的現象稱之為干涉。利用干涉現象進行幾何或物理性質的量測儀器則稱 為干涉儀。
2-1. 量測原理
測長干涉儀的起源為1881 年 Albert Michelson 所提出,此架構在經過科技進 展的推波助瀾下已成為具備高精度的測長儀器。其量測原理為基於光源波長,計 數其干涉條紋之變化並換算成位移,會受到週遭介質的干擾。Michelson 干涉儀的 簡易架構如圖 2-1.1。
單色光源導入分光鏡分成量測光和參考光,分別經移動鏡和參考鏡反射後沿 原光路回射,此時兩道光之電場分別為:
1
1 1 1
( )
1 1 i t kr aˆ
E G = E e
ω + −JJJGJJG φ(2.1)
2
2 2 2
( )
2 2 i t kr aˆ
E G = E e
ω +JJJGJJG−φ(2.2)
其中E 和1 E 分別為對應的電場強度,2 ω 為角頻率,t 為時間,kG為場傳遞常數,
r
G為位置向量,φ為光的絕對相位,ˆa 、1 ˆa 為兩電場偏振方向。當光返回分光鏡後2 會合成一道光束,其電場將會疊加。在此我們假設兩電場的振動方向相同,此時 感測器上所接收到的光強變成了:
( )
( )
( )
2 0
2 2
0 1 2 2 1 2cos (2 1) 2 1
I c E
c E E E E t k r r ε
ε ω φ φ
=
= + + Δ + − − −
JG
(2.3)
其中ε0為真空介電常數,c為光速,k為場傳遞常數(k (2π)
= λ ),r 為參考光行進1 的路程,r 為量測光行進的路程。若不考慮2 ε0c變化時造成的微小影響,角頻差不 變且兩光來自同一單頻光源則φ φ1 = ,此時餘弦函數裡的項僅與光行進的路程差2
(簡稱光程差,OPD)有關。進一步簡化式子,使兩電場振幅一樣(E1 =E2 = )則光I0 強為:
( )
0 2 1
2 1 cos 2
I I π r r
λ
⎛ ⎛ ⎞⎞
= ⎜⎝ + ⎜⎝ − ⎟⎠⎟⎠ (2.4)
當移動鏡移動 zΔ 的距離時,量測光所行走的光程差應為2n zΔ ,n為光行進介 質之折射率,2 倍則是因為去回造成二倍頻的關係。此時,光幅照函式再次簡化為:
( )
0
2 1 cos 2 2
I I π n z
λ
⎛ ⎛ ⎞⎞
= ⎜ + ⎜ Δ ⎟⎟
⎝ ⎠
⎝ ⎠ (2.5)
若光的波長已知,則光強的變化僅與位移有關,此量測方法為增量式量測。
圖 2-1.1 Michelson 干涉儀光路架構
2-2. 光路設計原理
2-2-1. 核心概念
為了光學系統簡化與獲得良好的干涉現象,同時提高待測端-光學讀頭間的幾 何對位公差,在進行光路設計時考慮並提出了幾項設計概念:
1. 共光路:所謂的共光路是指在雷射光從系統入射光柵,與返回系統在同一路徑
上。由於是自體的發射與接收,因此只有系統外光路徑是不同的,也只有在這部 份外在環境(溫度、溼度等)梯度變化會對雷射造成不同影響,這樣的設計可以減少 光學元件的數量進而縮短光路,達到系統的簡化與縮小更加降低環境影響的程 度,能獲得良好的干涉現象。另外共光路能透過光的可逆性達到高待測端-光學讀 頭對位公差的目的,在許多的光學量測系統上都有使用這樣的技巧。
2. 偏極理論之應用:光之偏極現象態應用為光路設計上重要的理論基礎。首先為 了達到共光路的目的,利用偏極光學元件來達成雷射的分光與接收是十分重要的 技術,透過雷射光偏極方向的不同將可控制光路徑的方向,實現縮小光機、折疊 光路等共光路的優點,此外透過偏極光學元件對不同偏極光的特性,可增加待測 端與光學讀頭間的對位公差。另外,原則上在計數干涉訊號時只需要經由光偵測 器取出一組弦波電子訊號進行解析即可,但在實際的應用上,為了區分待測物的 移動方向,以及消除部分誤差,將電子訊號細分割以得到更高之解析度,通常會 需要四組正交之弦波訊號。這同樣可以經由設計光的偏極狀態與配合各種光學偏 極元件來達到此目標。但在使用偏極理論特別需要注意的是,每種光學元件對各 偏極態的光之反射、透射效率皆有所差異,一旦將光源偏極化,很容易導致兩干 涉訊號強度不同,而影響到干涉之對比度,實際應用時得加以調整。
3. 符合光學干涉理論:由於干涉儀是利用光干涉訊號轉換量測依據如雷射波長或 光柵的間距來得知位移量。所以獲得良好的干涉現象是重要的課題,而雷射並非 理想單色性的點光源,因此必須符合光干涉的條件才可形成干涉現象,接著干涉 的強弱則可透過對比度因子來得知,其詳細狀況將在2-2-2 小節中進行簡易之探討。
4. 光學元件數目的少量化:一般來說,為了達到良好的光干涉品質,兩重疊光束 的平行度必須要保持地相當良好。然而,在光學元件的組裝過程中,元件的數量 越多,累積組裝誤差也就隨之增加,兩光束的平行度也就愈難保持,因而造成光 干涉訊號變差;此外光學元件在光束入射時會造成部份的反射,同樣的元件的數 量越多所造成的反射雜光越多,這些雜光將會降低干涉的對比度,因此基於以上 兩點,光學元件數目的減少也是一個相當值得考慮的重點。
5. 幾何對位公差:在此以光柵干涉儀之幾何對位公差為例:如圖 2-2.1 所示,若 光柵稍稍偏擺,將造成兩道干涉光束分離【38】。光束的分離將影響到干涉條紋之 對比度,進而影響到電子訊號之品質,甚至當光偏出光偵測器之範圍外,訊號將
完全消失。若在光路中無特殊設計,光柵在移動時,角度偏擺公差只能在數弧分 至數十弧分之間,只能應用於精度較高的平台,並且光路在架設及調校上也非常 困難。因此,在光路上必須經過特殊的設計,以達到高幾何對位公差的目標。對 位公差之概念將於2-2-3 小節討論。
圖 2-2.1 光柵干涉儀偏擺時之光路誤差
2-2-2. 干涉之對比度
從2-1 的分析可知,干涉條件的成立必需滿足:
1. 兩波長λ 相等或極接近
2. 兩疊合電場的偏振方向不互相垂直(假設其分別為ˆa 與1 ˆa ) 2 3. 兩疊合電場之相位差Δ 穩定 φ
然而,以上討論均視光波為理想點光源所發出的單色光,以及單一波長的無 限連續波。實際上的光波並非如此,而是具有一定的光譜寬度以及一定的尺寸。
因此在此處必須引入另一概念:同調性(coherence)。同調與干涉的涵義不同,干涉 是指光波相遇時相互作用的現象,但使得干涉得以建立的能力稱之為同調。理論 上,理想點光源發出的單色光是屬於完全同調(complete coherence),而實際的光波 則是部分同調(partial coherence),因此干涉條件的成立還必須加入兩項條件,時間 同調度(degree of temporal coherence)與空間同調度(degree of spatial coherence),兩 者分別與光源之單色性與尺寸有關,總和以上討論,式(2.3)可改寫為
( ) ( )
2 0
2 2
1 2 1 2 0
1 2
0
ˆ
sin
2 ˆ a E E Lcoh cos b
I E E a e t k r
b
π δ ππλθλθ ω φ
⎛ ⎞
⎜ ⎟
⎜ ⎟
⎝ ⎠
⋅ −
= + + Δ + Δ − Δ (2.6)
式中
(
aˆ1⋅aˆ2)
為兩光束偏振面單位向量之內積,Lcoh為此光源的同調長度(coherence length),b為光源的尺寸,θ 為光源的干涉孔徑角(interference aperture angle),λ0為光源中心波長。與式(2.3)不同的是,式(2.6)中
2 0
Lcoh
e
π⎛⎜⎜ δ ⎞⎟⎟
⎝ ⎠
−
與 0
0
sin b b π λθ π λθ
各自代表光源的
單色性與光源尺寸所造成干涉程度的變化,故對比度C 可重新改寫成:
2 0 1 2 0
0
sin
Lcoh
C
b I I e
b
π δ π λθ
π λθ
⎛ ⎞
⎜ ⎟
⎜ ⎟
⎝ ⎠
= − (2.7)
式(2.7)為條紋對比度因子【39】,可分為四項討論:
1. 由C∝
(
aˆ1⋅aˆ2)
可知當兩光波振動面平行時,干涉條紋具有最佳對比度,而兩光 波振動面垂直時將不能干涉。2. 由 1 2
1 2
2 I I C∝ I I
+ 可知當兩束光強度相等時干涉條紋具有最佳之對比度。當兩束光 強度有差別時對比度隨之下降。至相差四倍時對比度會降為原來之80%。
3. 由
2 0
Lcoh
C e
π⎛δ ⎞
− ⎜ ⎟
⎝ ⎠
∝ 說明了光程差δ0與同調長度Lcoh對對比度之影響:即光程差等於 零時,干涉條紋有最佳之對比度。當光程差等於同調長度時,干涉條紋消失。而 同調長度的計算公式分別為:
2 0
Lcoh λ
= λ
Δ (2.8)
其中,λ0為光源的主波長,Δλ為主波長的全半高寬(full width at half maximum, FWHM)。
4. 由 0
0
sin b
C b
π θ θλ π λ
∝ 可知入射光源尺寸和對比度的關係。當bθ =0時即光源尺寸不造
成光程差之變化時,干涉條紋對比度為最佳。當bθ λ= 時,0 C4 = ,即光源尺寸0 造成光程差之變化達一個波長時干涉條紋消失,故待測物之平整度需要很好,干 涉條紋才能有效產生。
2-2-3. 幾何公差概念
干涉儀系統是以解析干涉訊號為基礎換算成待測物的運動資訊,而良好的干 涉訊號除了上節的對比度之外,更重要的是量測端(光學讀頭)與運動端(待測鏡、
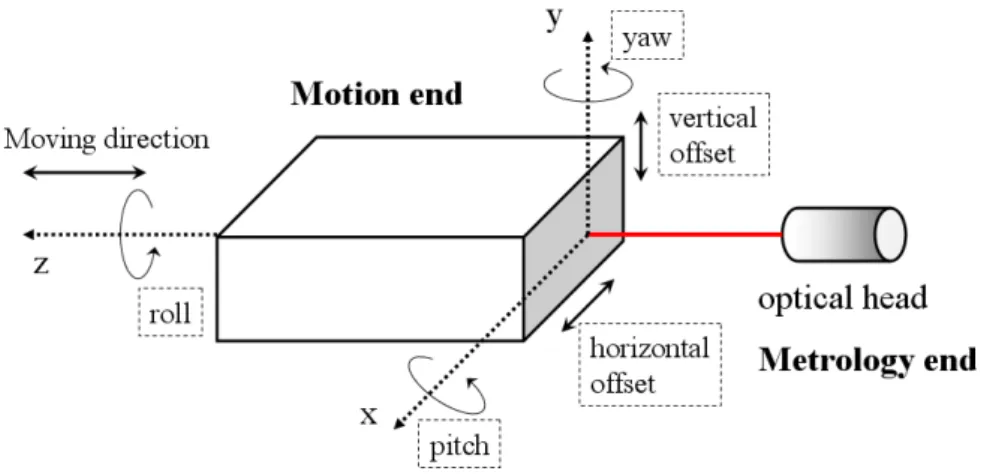
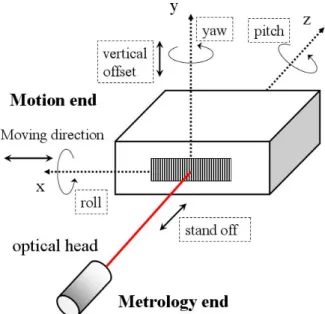
光柵等)之幾何對位是否在可容忍之公差內。舉例來說,若一商用雷射干涉儀做測 長用時,可以容忍運動軸與量測軸間有5D的角度誤差,則我們可以定義此雷射干 涉儀的角度公差為5D。仔細去分析單自由度運動的量測儀器,則量測端與運動端 會有五個自由度的幾何對位公差,如下圖。以測長干涉儀而言,基於量測方法的 不同,對位公差也要分成變光程量測(雷射干涉儀)和等光程量測(光柵干涉儀),前 者的公差包含三個角度偏擺(pitch, yaw, roll)和兩個直度誤差(vertical and horizontal straightness),後者的公差則包含三個角度誤差(pitch, yaw, roll)、一個遠離誤差(stand off)和一個直度誤差(offset)。若量測端或幾何端的對位關係超出了對位公差,則干 涉訊號將消失,干涉儀失去量測能力。因此,藉由光路的設計,提高干涉儀對位 公差是最重要、且最直接提升干涉儀至工程用感測器層級的環節。
圖 2-2.2 變光程量測之 head-to-scale 幾何對位關係圖
圖 2-2.3 等光程量測之 head-to-scale 幾何對位關係圖
2-3. 系統元件
干涉儀中使用的元件包含雷射光源、核心光路、反射鏡組(包含平面鏡、角偶 稜鏡或光柵等)和光感測器等,每種元件都盡量採用可市購之商品以簡化、加速系 統的整合。為了不要模糊本研究之焦點,以下僅簡單介紹各元件原理及重要參數 選擇。
I. 雷射光源
在高精度水準的干涉儀中,He-Ne 雷射為常見的光源,主要是因為其具有高同 調性、擴束角小、指向性高及波長恆定等優點。但就實務面,其龐大的腔體局限 了整個干涉儀的靈活性,使用光纖導引雷射也只是把體積的問題留到系統外處理 罷了。現今在光電量測的實務上,使用二極體雷射做為系統雷射光源無論是壽命、
靈活性、機械性質等都較He-Ne 雷射好上許多,受利於 CD、DVD 產業的發展,
現今二極體雷射的成本甚至只有 He-Ne 雷射的十分之一不到。吾人只需透過系統 的光路設計和訊號處理即可解決或降低二極體雷射的一些負面特性。
本研究主要採用的二極體雷射光源有兩種:在定光程量測系統中,採用了記 典雷射所研製之雷射,其客製化的雷射可以在體積、功率、成本上達到很好的平 衡,適合本研究使用;在變光程量測系統時,考量到光的準直性,採用了成本較 高的準直雷射模組(Thorlabs 生產之 CPS180),其模組化的雷射腔體中以裝置了準 直透鏡,發散角優於0.3 mrad 。
表 1 兩種雷射關鍵參數總覽
參數 客製化雷射 CPS180 單位
波長 635 635 nm
功率 0.5-1 1 mw
光點形狀 圓形 圓形
準直性 聚焦型 <0.3 mrad
初始光點直徑 1 4 mm
II. 光學元件
本干涉儀系統中,所需鏡組包含偏極化分光鏡(polarization beam splitter, PBS)、分光鏡(non-polarization beam splitter, NPBS)、四分之一波板(quarter wave plate)、平面反射鏡(plane mirror, PM)、直角稜鏡(Right angle prism)、角偶稜鏡(corner cube reflector or retroreflector, RR)和全像光柵(holographic grating, G)。這些光學鏡 組的主要目的是將入射光分光出去並反射回干涉儀進行疊合,因此其品質和規格 只需達到一定水準,即可藉由後續的調整組裝動作達到光的疊合。由此,本系統 的鏡組是以較低廉的商業用途市購品為主:
表 2 系統光學元件
元件名稱 廠牌 尺寸 / mm 規格 用途
偏極分光鏡 Foctek 5 5 5× × 5%偏振混合 偏極化分光 非偏極分光鏡 Foctek 5 5 5× × 無 普通分光 四分之一波板 Foctek 5 5 1× × 無 延遲光之電場
直角稜鏡 Foctek 5 5 5× × 誤差 3arcmin
< 將雷射偏折90 度 角偶稜鏡 Foctek φ = 15 誤差
10arcsec
< 將雷射偏折180 度 平面反射鏡 Foctek 多種尺寸 1
10λ 反射雷射光
全像光柵 Edmund 25 10 8× × 1200 lines/mm 產生繞射光
III. 光偵測器
相對於雷射或 LED 為光收發模組的發射端,光感測二極體(photodiode:PD) 便是接收端,其操作方式不同於提供順向偏壓的雷射或 LED,其主要是供應光感 測二極體一個逆向偏壓,內部相當於電路中的開路。當入射光子在到達本質層 (intrinsic layer)後,可提供足夠的能量,然後因量子效應產生電子、電洞對而產生 電流,此時電流大小將正比於入射光的強度,再藉著電子訊號的量測,去反推得 到原始的光訊號強弱。理想的光感測二極體材料其間隙能帶的能量,應該略小於 系統所用最長光波光子的能量,才能有效的吸收光子使光偵測器反應靈敏,同時 減小暗電流(在光子照射下,光偵測器半導體會因溫度變化,導致載子活動產生不 需要的電流)的產生。在本系統中,選用的雷射光波長為635 nm,為了對該波長 有適當地吸收率,選擇以矽為材料的光偵測器(OSRAM 出產,型號 BPW34S),
其在工業中已大量的應用,因此價格非常低廉。
2-4. 多工式干涉模組之研製
干涉儀是由一系列光學與機械零組件所構成,這些光學元件和機械零組件之 設計製造、安裝、調整等四步驟決定了整個干涉儀系統的可信度和穩定度。不合 理之機械結構設計、安裝以及振動、溫飄會導致干涉條紋穩定性不良。由於光干 涉之靈敏度極高,故干涉儀之穩定性要求為所有儀器當中最嚴格的一種。
典型之干涉儀包含光源、分光、回射、干涉觀測等部份,其中後三項牽扯到 干涉條紋之形狀,因此其光機零組件的要求最高。
根據以上考量以及光學元件少量化之趨勢,本研究提出一種基於共光路概念 下的多工式干涉模組(versatile interferometric module, VIM),其光學結構如圖 2-4.1:
線偏極化的單頻雷射光經過PBS1 後分成透射之 P 光(metrology beam 2)和反射 S 光(metrology beam 1),此兩道雷射探頭所夾帶的光程、光頻資訊會隨著參考鏡、
待測鏡的自由度不同而跟著變化;兩道光回到PBS1 時由於去回都有經過四分之一 波板兩次(Q1 或 Q2),因此 S 光轉換成 P 光、P 光轉換成 S 光(SP 轉換),兩道光會 疊合到達 Q3。左右兩光路在通過 Q3 後分別變成了左旋偏光和右旋偏光,不產生 干涉,因此後面的光路架構就是為了要讓兩光路產生四道干涉訊號以方便進行後
面的辨向和差動處理,如圖 2-4.2 所示。分光鏡 BS 將兩道光分別分出等值的疊合 光後在PBS2 和 PBS3 處取出其在 0 度、90 度、180 度和 270 度的偏振方向進行疊 合干涉。
圖 2-4.1 VIM 內部結構及光路行進圖
圖 2-4.2 Q3 後的光路架構與極化狀態
2-4-1. 瓊斯運算
在光學中,可以以瓊斯運算來描述偏振的現象。瓊斯運算是麻省理工學院的 R. C. Jones 教授在 1941 年提出。偏振光的狀態以瓊斯向量表示,而其他線性的光 學元件則以瓊斯矩陣表示。當偏振光通過偏振片或是波板時,把原來偏振狀態的 瓊斯向量乘以光學元件的瓊斯矩陣,即可運算出新的偏振態,它是用來描述連續 電場的光訊號,較適用於表達雷射等同調光源,且其寫法及計算較單純,容易使 用。必須要注意瓊斯運算只適用於完全極化的光,如果是部分極化、無極化或不 同調則需使用穆勒運算。本研究中以雷射為光源,偏極狀態穩定,因此採用瓊斯 運算法分析。其詳細之運算方式不在本研究討論範圍,以下直接針對VIM 之偏振 運算模式進行分析:
在這裡將偏振光的狀態以瓊斯向量表示,而光學元件則以瓊斯矩陣表示,即 可了解光前進時其偏振態的變化。以下表為使用到的光學元件之瓊斯矩陣。
表 3 本研究中的瓊斯表示法 水平透振之PBS
穿透光 MPBS,P ⎥
⎦
⎢ ⎤
⎣
⎡ 0 0
0
1 水平透振之PBS
反射光 MPBS,S ⎥
⎦
⎢ ⎤
⎣
⎡ 1 0
0 0
45 度透振之 PBS
穿透光 MPBS,P ⎥
⎦
⎢ ⎤
⎣
⎡ 1 1
1 1 2
1 45 度透振之 PBS 反
射光 MPBS,S ⎥
⎦
⎢ ⎤
⎣
⎡
−
− 1 1
1 1 2 1
四分之一波板
快軸45 度MQWP ⎥
⎦
⎢ ⎤
⎣
⎡ 1 1 2 1
i
i 四分之一波板
快軸-45 度MQWP ⎥
⎦
⎢ ⎤
⎣
⎡
−
− 1 1 2 1
i i
首先分析兩道參考光疊合前(從雷射光源至到達 Q3 前的光路)的瓊斯運算,為 簡化運算,進入編碼模組前我們先不考慮波向量的變化,只考慮其偏振方向:
線偏光源的Jones’s Vector 為: 1 J ⎡ ⎤1
= ⎢ ⎥
⎣ ⎦
左光路行進路徑:LD–PBS(反射)–Q1–待測鏡組–Q1–PBS(透射)–Q3
1 1 0 1 1 0 0 1
1 1 1
1 0 0 1 1 0 1 1
2 2 2
i i i
M i i i
⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤
= ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦
左光路
3
1 2 1
L Q
M ⎡ ⎤i
∴ = ⎢ ⎥⎣ ⎦− ,此為左光路通過Q3 時的電場偏振方向。
右光路行進路徑:LD–PBS(透射)–Q2–待測鏡組–Q2–PBS(反射)–Q3
1 0 0 1 1 1 0 1
1 1 1
1 0 1 1 1 0 0 1
2 2 2
i i i
M i i i
⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤
= ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦
右光路
R 3
1 1
Q 2
M i
−
∴ = ⎡ ⎤⎢ ⎥
⎣ ⎦,此為右光路通過Q3 時的電場偏振方向。
此時,兩道光已在Q3 合併,假設此夾帶光頻、光程的電場為EJJG1
、JJGE2
,並回顧式 (2.1)、(2.2)則可運算出兩電場成為:
3
1 1 1
( )
1 1
2 1
L Q
i t kr i
E E e
ω + −φ ⎡ ⎤⎢ ⎥⎣ ⎦−
=
JJJGJJGG
(2.9)3
2 2 2
( )
2 1 1
2
R Q
i t kr
E E e
ω + −φ ⎡ ⎤⎢ ⎥−i=
JJJGJJG ⎣ ⎦G
(2.10)若外部的待測鏡(平面鏡或光柵)產生運動,將會導致左右兩光路產生光程差
(
r2 −r1)
或角頻差(
ω ω2− 1)
,此資訊會夾帶在兩光路的電場EJJG1 和JJGE2內,接著我們繼 續運算兩道光的電場、光強,考慮便於計算,令兩光強振幅E1 =E2 =E0,且光源 相同則φ φ1 = 。 2
干涉光束經由 BS 分為等光強的兩束光,進入 PBS2 和 PBS3,再藉由透射或 反射入射四個PD。在 PD1 上的電場分布將會是:
( )
1 2
1 2
1 1 2
1 1 2 2
0
1 1 2 2 2
0
( ) ( )
( ) ( )
1 0 0 0 1 1
0 0
2 1
2 0
PD
r r
r r
i t k i t k
i t k i t k
E E E
E i
E
e e
e e
π π
ω φ ω φ
ω φ+ ω φ +
+ − + − + − + −
+
⎡ ⎤
=⎢ ⎥ +
⎣ ⎦
⎧ ⎡ ⎤ ⎡ ⎤− ⎫
= ⎨ ⎢ ⎥ ⎢ ⎥⎬
⎣ ⎦ ⎣ ⎦
⎩ ⎭
⎡ ⎤
⎢ + ⎥
= ⎢⎣ ⎥⎦
JJGG JJGG
JJGG JJGG
JJJJG JJG JJG
(2.11)
同理,在其他PD 上的電場分布將會是: