第六卷 第一期 中華民國一O七年一月
Volume 6, Number 1 January 2018
Published by Chinese Society of Cadastral Survey &
National Land Surveying and Mapping Center
內政部國土測繪中心共同發行
============================================================
一、理監事會:
理 事 長:黃榮峰 副理事長:謝福來
常務理事:蕭輔導、高書屏、黃進雄
理 事:洪本善、崔國強、吳宗寶、江渾欽、楊 名、周天穎、吳相忠、王定平、王啟鋒、
蕭萬禧、梁崇智、紀聰吉、謝福勝、張元旭、邱仲銘、陳惠玲 常務監事:蘇惠璋
監 事:史天元、蕭正宏、容承明、白敏思 秘 書 長:鄭彩堂(兼任)
副秘書長:李文聖(兼任)
秘 書:黃錦桂(兼任)、陳鶴欽(兼任) 幹 事 :何美娟、楊雅茜
============================================================
二、各種委員會:
(一)服務委員會:
主任委員:崔國強
委 員:王定平、黃仰澤、賴澄標、鄭宏逵、蘇昱彰、朱上岸、黃建華、吳啟賢 總幹事:梁崇智
幹 事:劉彥秀、吳震緯、蕭爵增 (二)編輯委員會:
主任委員:楊 名
委 員:史天元、林老生、洪本善、洪榮宏、楊明德、黃倬英、詹士樑、趙鍵哲 陳繼藩、饒瑞鈞
總編輯:陳國華 編 輯:陳鶴欽 幹 事:黃郁恩 (三)研究發展委員會:
主任委員:洪本善
委 員:王宏仁、林志清、林登建、吳宗寶、吳聲鴻、黃文華、賴偉君、駱旭琛、
蕭萬禧、謝福勝 總幹事:陳世崇
幹 事:謝東發、董荔偉 (四)獎章委員會:
主任委員:蕭輔導
委 員:洪本善、張元旭、曾清凉、曾國鈞、謝福來 幹 事:由本會秘書處兼任
(五)教育訓練委員會:
主任委員:劉正倫
委 員:崔國強、李文聖、葉文凱 總幹事:蕭泰中
幹 事:謝正亮 (六)國際事務委員會:
主任委員:周天穎
委 員:李文聖、葉美伶、曾耀賢、盧鄂生、羅正方 總幹事:邱明全
幹 事:李佩珊、湯美華 (七)界址鑑定及諮詢委員會:
主任委員:盧鄂生
委 員:邱仲銘、江渾欽、洪本善、崔國強、謝福勝、王年水、駱旭琛、吳宗寶、
吳相忠、曾耀賢、蕭萬禧、王啟鋒
====================================================================
Vol. 6, No. 1, pp. 1 ~ 14
行動裝置內建相機之內方位 及內建定位定向感測器精度分析
周孜恆
1王聖鐸
2* 論文收件日期:105.12.08論文修改日期:106.02.16 論文接受日期:106.02.26
摘 要
近年來智慧型行動裝置的發展迅速,智慧型手機、平板電腦越來越普及,裝置內 建的相機解析度也日益提升, 尤其內建了全球導航衛星系統 (Global Navigation Satellite System, GNSS)、陀螺儀(Gyroscope)、加速度計(Accelerator)等微機電晶片後,
其方便性更甚於一般數位相機。然而行動裝置內建相機之內方位參數穩定度有待檢驗,
感測器所提供之位置與姿態,是否足以作為拍攝影像之直接地理定位定向(Direct Georeferencing)亦有待評估。因此本研究將參考前人使用非量測性數位相機進行近景 攝影測量的研究成果及理論基礎,以實做方式分析使用行動裝置應用於近景攝影測量 之內、外方位參數精度。本研究項目有二:(1)裝置相機內方位之穩定性:本研究針 對同一型號四台平板,以及使用同一台行動裝置重複拍攝率定標,分別利用iWitness Pro軟體進行相機率定,以評估同一型號裝置與同一台裝置之內方位參數是否穩定。
(2)行動裝置內建定位定向感測器之精度:本研究針對同一型號四台平板之GNSS坐標 以及姿態角進行精度分析,同時與e-GNSS作比較,以評估平板電腦之外方位參數是 否穩定。
關鍵詞:行動運算裝置、近景攝影測量、相機率定、精度分析
1 碩士生,國立臺灣師範大學地理學系。
2 副教授,國立臺灣師範大學地理學系。
* 通訊作者,TEL:(02)7734-1683,FAX: (02)2369-1770,Email: [email protected]。
Accuracy Analysis on Built-in Camera’s Interior Orientation and Sensors’ Geo-referencing of Portable
Devices
Zih-Heng Chou
1Sendo Wang
2*Abstract
Smart portable devices developed rapidly in recent years. Tablets and smartphones are more common for people. The resolution of the camera in these devices is also rising. In particular, after built-in GNSS, gyroscopes, accelerometers and other MEMS sensors, the device is more convenient than general digital cameras. However, the stability of the interior orientation parameters of the built-in camera has to be tested. The position and attitude provided by the built-in sensor, is sufficient as a direct geo-referencing of the shooting images, also yet to be assessed. Therefore, this study will be based on former research results about non-metric digital camera used in close-range photogrammetry. We will design experiments to explore the accuracy of interior and exterior orientation. This study has two issues. First, the interior orientation stability of the portable devices: we will repeat shooting the coded calibration targets by the same model four tablets and by a single tablet. Then we get interior orientation parameters by camera calibration in iWitness Pro.
Second, the accuracy of GNSS and gyroscopes in portable devices: We analyze the precision of GNSS and attitude by the same model four tablets, then compared with e-GNSS.
Keyword: Accuracy Analysis, Camera Calibration, Close-range Photogrammetry, Portable
Computing Devices,
1 Master Student, Department of Geography, National Taiwan Normal University.
2 Associate Professor, Department of Geography, National Taiwan Normal University.
一、前 言
近景攝影測量(Close-Range Photogrammetry)是透過對目標物進行攝影,且攝影 物距不超過 300 公尺之攝影測量(Wolf & Dewitt, 2000)。隨著相機的普及,今日可用 高解析度之非量測型數位相機(Non-Metric Digital Camera)來代替量測型相機。但非量 測型相機之內方位參數較不穩定,且鏡頭畸變差較嚴重,因此必須利用近景攝影測 量軟體進行相機率定,決定其內方位參數與鏡頭畸變差。市面上常見的商用近景攝影 測量軟體包含了 iWitness、Photo Modeler、LensPhoto。如(鄒芳諭,2010)使用了 iWitness、Photo Modeler、LensPhoto 探討相機率定結果及像距與物距之關係。(吳笛 豪,2008)則是使用 iWitness 軟體進行相機率定並完成高雄市舊火車站之三維數位模 型,同時也利用地面雷射掃描技術進行三維建模,並分別探討兩技術所能達到之地 物測量精度。
傳統攝影測量要得到影像上任一點的地面坐標系的坐標值,必須經過像片坐標系 的建立、利用控制點進行外方位參數的求解,再根據解算得到的外方位參數,計算影 像點之地面坐標值,方法如單張像片之後方交會法、多張重疊像片之光束法平差等,
過程較為繁瑣。若能利用全球定位系統(Global Positioning System, GPS)提供相機中心 的三維地理坐標,和利用慣性量測單元(Inertial Measurement Unit, IMU)提供相機三個 軸向之旋轉姿態角,即能獲得六個方位參數(𝑋0, 𝑌0, 𝑍0, ω, φ, k),等於是影像之直接地 理定位定向(Direct Georeferencing)。如(周尚弘,2005)將 GNSS/IMU 直接測定的外方 位參數和空三計算之外方位參數結果進行內部精度比較分析。(李易唐,2014)則藉由 大型 UAV 搭載多相機進行直接地理定位,分析多相機系統的直接地理定位精度。
綜合上述,本研究將參考前人的研究成果及理論基礎,使用平板電腦、智慧型手 機完成拍攝作業後,進行相機率定,決定內方位參數及鏡頭畸變差,並確認其穩定與 否。接著設計實驗,評估平板電腦、智慧型手機內建 GNSS、陀螺儀及電子羅盤之精 度,確認其是否能夠使用於直接地理定位定向。若精度允許,建議後續研究可利用 Imagine Photogrammetry 或其他航測軟體組成立體模型,利用前方交會原理量測點位 的三維坐標,以便確認行動裝置拍攝影像作為攝影測量之用的精度。
二、使用之行動裝置
本研究使用之行動裝置為 ASUS MEMO Pad 8(ME581CL),表 1 為其產品規格:
表 1 ASUS MEMO Pad 8 產品規格(ASUS, 2015) 裝置名稱 ASUS MEMO Pad 8
作業系統 Android 4.4
相機畫素 5 百萬畫素後置鏡頭自動對焦、2 百萬畫素前置鏡頭
感測器 重力感測器、光源感測器、電子羅盤、霍爾感測器、陀螺儀 定位系統 GPS & GLONASS 雙星系統
另外使用智慧型行動電話 SONY Xperia Z3(表 2)作為對照組:
表 2 Sony Xperia Z3 產品規格(SONY, 2014) 裝置名稱 Sony Xperia Z3
作業系統 Android 4.4
相機畫素 20.7 百萬畫素相機 2.2 百萬畫素正面相機
感測器 加速度感測器、環境光感測器、氣壓計、陀螺儀、磁力計 定位系統 GPS & GLONASS & BeiDou 三星系統
三、內方位參數率定
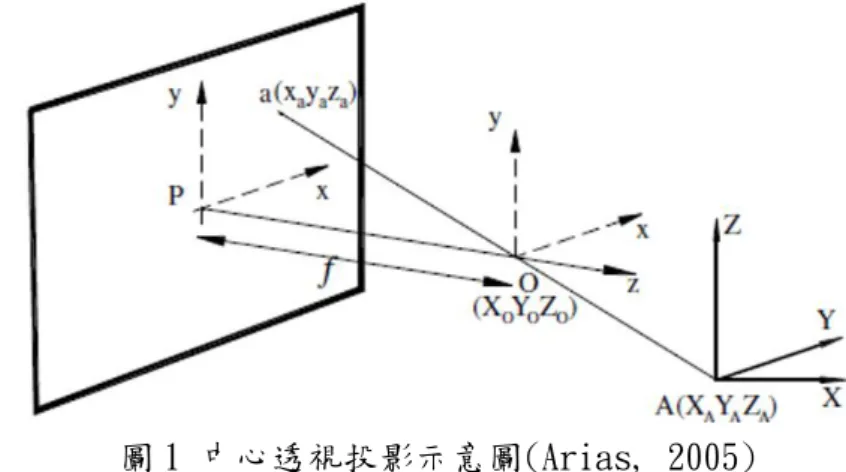
中心透視投影(Central Perspective Projection)是近景攝影測量的基礎,中心透視投 影是由物體發出之光線,依照光線的直進性經過一投影中心,投影在像平面中。如圖 1 所示,物空間之物點 A(𝑋𝐴, 𝑌𝐴, 𝑍𝐴)穿過透視中心 O(𝑋0, 𝑌0, 𝑍0),投影在像平面中即為 像點 a(𝑥𝑎, 𝑦𝑎, 𝑧𝑎),形成 A, O, a 三點共線。點 P 為像平面上之像主點(Principal Point),
像主點至透視中心的距離為像主距(Principal Distance),物距無窮遠時像主距等於焦距 𝑓。
圖 1 中心透視投影示意圖(Arias, 2005)
(一)軟體使用
內方位元素(Element of Interior Orientation)為恢復拍攝瞬間,相機透視中心與像 片或影像間相對關係之參數,本研究選擇商用的近景攝影測量軟體 iWitness 進行相 機率定。iWitness 之影像坐標改正函數共使用 10 個參數,除了廣義的 3 個內方位參 數外,尚包括 7 個附加參數來表示鏡頭畸變差。其率定參數分別為:
相機內方位參數(Camera interior orientation):𝑓, 𝑥𝑝, 𝑦𝑝
輻射畸變差參數(Radial distortion parameters):𝐾1, 𝐾2, 𝐾3
偏心畸變差參數(Decentering distortion parameters):𝑃1, 𝑃2
仿射、非正交參數(Affinity, non-orthogonality):𝐵1, 𝐵2 相關數學函式如下:
𝑥̅=𝑥 − 𝑥𝑝 𝑦̅=𝑦 − 𝑦𝑝 𝑟 = √𝑥̅2+ 𝑦̅2 𝑑𝑟 = 𝐾1𝑟3 + 𝐾2𝑟5+ 𝐾3𝑟7 𝑥𝑐 = 𝑥̅ + 𝑥̅𝑑𝑟
𝑟 + 𝑃1(𝑟2+ 2𝑥̅2) + 2𝑃2𝑥̅𝑦̅ + 𝐵1𝑥̅ + 𝐵2𝑦̅
𝑦𝑐 = 𝑦̅ + 𝑦̅𝑑𝑟
𝑟 + 𝑃2(𝑟2+ 2𝑦̅2) + 2𝑃1𝑥̅𝑦̅
式中
𝑥̅、𝑦̅:改正像主點偏移之像坐標 𝑟:像點至像主點之輻射距離
𝑑𝑟:對稱輻射畸變差
𝑥𝑐、𝑦𝑐:改正後之像點像坐標
(二)佈設率定實驗場
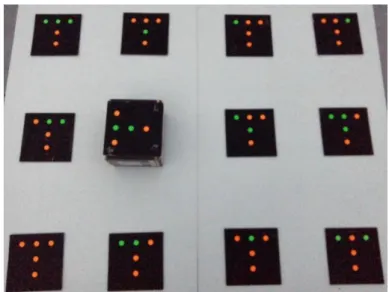
本實驗以 iWitness 原廠設計之率定標完成相機自動率定(AutoCal),首先佈設率定 檢驗場。率定標共有 12 片黑色紙板,內含排列成 T 字的 5 個實心圓點,共有 60 個率 定標點。圓點大小相同,顏色為紅色或綠色,每片率定標的圓點顏色組合皆不相同。
依據 iWitness Pro 的軟體使用手冊建議,率定標應分布於大約 2.5 m x 2.5 m 的空間中;
率定標之間儘量不要在同一平面上,率定場中的某些率定標與其他率定標之間的高差 需在 15~20 公分之間。
因此,本研究佈設率定檢驗場時,將 12 片率定標置於長約 1.8 公尺、寬約 1.5 公尺的平面白色珍珠板上,使率定標和背景顏色形成對比,其中 1 片率定標置於高約 15 公分的物體上,使其與另外 11 片率定標位於不同平面,如圖 2 所示:
圖 2 iWitness 率定標及檢驗場佈設
(三)拍攝作業
首先將 4 台平板電腦與手機內建之相機基本設定調整如下表 3,依據 iWitness Pro 的軟體使用手冊建議,相機焦距盡量設置為無窮遠;拍攝每張像片之間不可進行放大 縮小;拍攝時約距離率定標 3 公尺,並盡量使得率定標有分布在像片中的角落。
本研究利用每台相機分別對率定標共拍攝兩組影像,環繞率定標做 8 個方向(4 個邊和 4 個對角方向)正拍、與正 90 度旋轉相機機身拍攝,一共拍攝 16 張影像,圖 3 為拍攝 iWitness 率定標之 16 張影像。完成拍攝後將影像載入 iWitness 軟體中進行自 動化的影像量測及參數率定,以得知平板電腦及手機內建相機之內方位參數。
表 3 行動裝置內建相機之基本設定
行動裝置 解析度 對焦模式 ISO 白平衡
ASUS 平板 2560x1920(4:3) 無限遠 400 自動 SONY Z3 手機 5248x3936(4:3) 單點自動對焦 400 自動
圖 3 拍攝 iWitness 率定標之 16 張影像
(四)率定結果
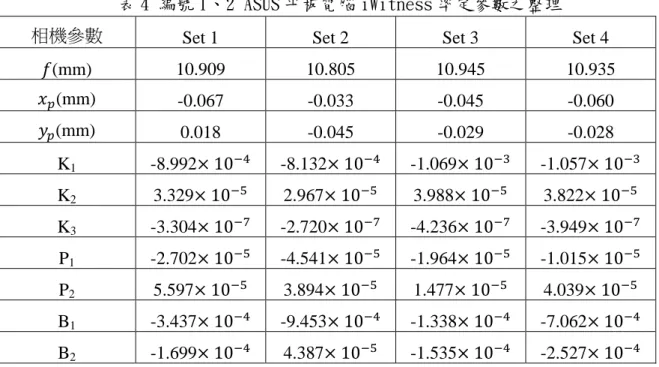
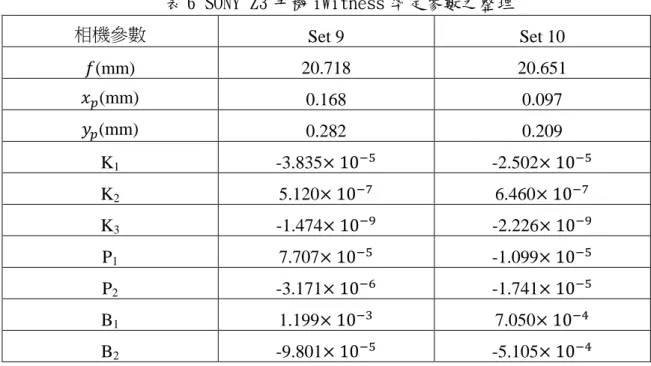
本研究利用 4 台相同 ASUS 平板電腦為實驗組,各拍攝兩組(Set)影像,Set 1、Set 2 為同一裝置,Set 3、Set 4 為同一裝置,依此類推,Set 9、Set 10 則為 SONY Z3 手 機所拍攝之影像作為對照組,一共 10 組像片之率定參數結果整理如下表 4 至表 6。
結果顯示,同一台裝置前後兩組像片之內方位參數差異不大,非常穩定。但同一 型號之 4 台不同平板電腦之間的內方位參數都不盡相同,焦距(𝑓)方面編號 1 及編號 2 平板電腦較為接近,差距小於 0.1mm。像主點位移量(𝑥𝑝, 𝑦𝑝)方面,編號 3 之平板電腦 較大,其餘 3 台皆小於正負 0.1mm。
對稱輻射畸變差方面,將結果進一步展示為二維圖示,如下圖 4,縱軸為對稱輻 射畸變差(𝑑𝑟),橫軸為像點至像主點之輻射距離(Radial distance),圖示清楚顯示同一 台平板電腦之對稱輻射畸變差有相同的趨勢,而 4 台不同平板電腦之間差異相當大,
推測原因可能為不同鏡頭打磨時的不完美。
圖 4 ASUS 平板電腦及 Z3 手機之對稱輻射畸變差(𝑑𝑟),縱軸單位:mm 整體而言,同一台裝置前後兩組像片之內方位參數差異不大,而不同 4 台平板電 腦之間內方位參數皆不穩定,推測可能原因為在鏡頭裝配的過程當中之人為誤差所導 致。除 4 台平板電腦外,Set 9 以及 Set 10 為 SONY Z3 手機拍攝兩組像片之率定結果,
結果顯示其焦距約為 ASUS 平板電腦的 2 倍,像主點位移量大致上皆大於平板電腦,
接近編號 3 平板,對稱輻射畸變差係數(𝐾1, 𝐾2, 𝐾3)則皆小於平板電腦。
-0.100 -0.080 -0.060 -0.040 -0.020 0.000 0.020 0.040 0.060 0.080
0 5 10 15 20 25 30 35 40
對稱輻射畸變差(𝑑𝑟)
Set1 Set2 Set3 Set4 Set5 Set6 Set7 Set8 Set9 Set10
表 4 編號 1、2 ASUS 平板電腦 iWitness 率定參數之整理 相機參數 Set 1 Set 2 Set 3 Set 4
𝑓(mm) 10.909 10.805 10.945 10.935 𝑥𝑝(mm) -0.067 -0.033 -0.045 -0.060 𝑦𝑝(mm) 0.018 -0.045 -0.029 -0.028
K1 -8.992× 10−4 -8.132× 10−4 -1.069× 10−3 -1.057× 10−3 K2 3.329× 10−5 2.967× 10−5 3.988× 10−5 3.822× 10−5 K3 -3.304× 10−7 -2.720× 10−7 -4.236× 10−7 -3.949× 10−7
P1 -2.702× 10−5 -4.541× 10−5 -1.964× 10−5 -1.015× 10−5 P2 5.597× 10−5 3.894× 10−5 1.477× 10−5 4.039× 10−5 B1 -3.437× 10−4 -9.453× 10−4 -1.338× 10−4 -7.062× 10−4 B2 -1.699× 10−4 4.387× 10−5 -1.535× 10−4 -2.527× 10−4
表 5 編號 3、4 ASUS 平板電腦 iWitness 率定參數之整理 相機參數 Set 5 Set 6 Set 7 Set 8
𝑓(mm) 9.636 9.864 10.486 10.521 𝑥𝑝(mm) -0.122 -0.115 -0.011 -0.010 𝑦𝑝(mm) -0.200 -0.187 -0.070 -0.058
K1 -7.569× 10−4 -8.269× 10−4 -1.110× 10−3 -1.018× 10−3 K2 3.411× 10−5 4.135× 105 4.657× 10−5 4.151× 10−5 K3 -3.625× 10−7 -4.192× 10−7 -4.988× 10−7 -4.316× 10−7 P1 4.914× 10−5 1.365× 10−5 -4.867× 10−7 1.509× 10−5 P2 -5.363× 10−5 -8.607× 10−5 -4.118× 10−5 -1.411× 10−5 B1 1.019× 10−3 1.335× 10−3 9.108× 10−4 5.227× 10−4 B2 1.970× 10−4 2.286× 10−4 -6.131× 10−4 -1.519× 10−4
表 6 SONY Z3 手機 iWitness 率定參數之整理
相機參數 Set 9 Set 10
𝑓(mm) 20.718 20.651
𝑥𝑝(mm) 0.168 0.097
𝑦𝑝(mm) 0.282 0.209
K1 -3.835× 10−5 -2.502× 10−5 K2 5.120× 10−7 6.460× 10−7 K3 -1.474× 10−9 -2.226× 10−9
P1 7.707× 10−5 -1.099× 10−5 P2 -3.171× 10−6 -1.741× 10−5 B1 1.199× 10−3 7.050× 10−4 B2 -9.801× 10−5 -5.105× 10−4
四、內建定位定向感測器精度探討
外方位元素(Element of Exterior Orientation)為重建攝影瞬間相機透視中心於物空 間坐標系統之位置與姿態,以六個參數表達。其中三個位置參數,包含攝影瞬間透視 中心之物空間坐標(𝑋0, 𝑌0, 𝑍0);三個姿態參數,包括攝影瞬間之旋轉姿態角(ω, φ, k)。
當恢復相機內方位元素(𝑓, 𝑥𝑝, 𝑦𝑝)及外方位元素(𝑋0, 𝑌0, 𝑍0, ω, φ, k)後,可達物點、相機 攝影中心與像點之三點共線條件,其共線關係可用共線方程式(Collinearity Equations) 來表示,其應用在攝影測量之各個層面,如空間前方交會與後方交會等。其中空間前 方交會(Space Intersection)即以共線方程式為基礎,利用立體對重疊影像之共軛光束實 施前方交會為攝影測量獲取物點坐標的基本做法。如圖 1 中心透視投影,物點 A、透 視中心 O、像點 a 三點共線,共線方程式如下所示:
𝑥𝑎− 𝑥𝑝 = −𝑓𝑚𝑚11(𝑋𝐴−𝑋𝑂)+𝑚12(𝑌𝐴−𝑌𝑂)+𝑚13(𝑍𝐴−𝑍𝑂)
31(𝑋𝐴−𝑋𝑂)+𝑚32(𝑌𝐴−𝑌𝑂)+𝑚33(𝑍𝐴−𝑍𝑂) (1) 𝑦𝑎− 𝑦𝑝 = −𝑓𝑚𝑚21(𝑋𝐴−𝑋𝑂)+𝑚22(𝑌𝐴−𝑌𝑂)+𝑚23(𝑍𝐴−𝑍𝑂)
31(𝑋𝐴−𝑋𝑂)+𝑚32(𝑌𝐴−𝑌𝑂)+𝑚33(𝑍𝐴−𝑍𝑂) (2) 𝑥𝑎, 𝑦𝑎:a 點之像坐標
𝑥𝑝, 𝑦𝑝:像主點偏移量 𝑓:相機焦距
𝑋𝐴, 𝑌𝐴, 𝑍𝐴:點 A 之物空間坐標 𝑋𝑂, 𝑌𝑂, 𝑍𝑂:攝影中心之物空間坐標 𝑚11~𝑚33:為 3×3 旋轉矩陣 R 之元素
攝影測量中為獲得物點之空間坐標,必須進行相機率定確認其內方位參數,並利 用手機內建的 GNSS 及陀螺儀確定外方位參數,才能進行空間前方交會獲得物點之三
維空間坐標。外方位參數的穩定性是在本研究進行近景攝影測量中需要探討的部分,
因此本研究設計下列實驗,探討行動裝置 ASUS 平板電腦內部感測器之精度。
(1) 平板電腦 GNSS 之精度檢驗
(2) 平板電腦陀螺儀、電子羅盤之精度檢驗 (3) 利用 e-GNSS 檢驗平板電腦之 GNSS 精度
(一)平板電腦 GNSS 之精度檢驗
本研究設計實驗檢測 4 台相同型號平板電腦之 GNSS 穩定度。實驗地點設在周圍 無遮蔽物且 GNSS 收訊良好之師大文學院頂樓,將 4 台相同型號的 ASUS 平板電腦 緊鄰放置,利用裝置中的 GPS Status 應用程式,顯示平板電腦中的 GNSS 定位結果,
如下圖 5,同時間每一台平板電腦皆每隔 30 秒截圖擷取 GNSS 數據,共擷取 10 次,
最後將數據取平均和標準差,以比較平板電腦內建 GNSS 之穩定性,另外也加入 SONY Z3 手機作為對照組。實驗結果如下表 7。
圖 5 GPS Status 定位結果截圖
表 7 ASUS 平板電腦及 SONY Z3 手機之 GNSS 實驗結果
N、E 坐標 平均值 標準差 全距
編號 1 平板電腦 N(m) 2768646.756
4.657E-10
0.000 E(m) 303184.097 0.000 0.000 編號 2 平板電腦 N(m) 2768647.5801.162
4.415 E(m) 303188.9571.714
5.063 編號 3 平板電腦 N(m) 2768641.9096.561
17.719E(m) 303180.722
1.908
5.106 編號 4 平板電腦 N(m) 2768649.1751.140
3.346 E(m) 303184.6382.930
9.088 SONY Z3 手機 N(m) 2768651.9700.508
1.108 E(m) 303186.0950.002
0.004 實驗結果顯示,編號 1 平板電腦與 SONY Z3 手機之 GNSS 數據最為穩定,編號 3 的 N 坐標及編號 4 的 E 坐標數據從全距及標準差皆可以看出其較不穩定,而其餘觀 測數據之標準差則介於 1 至 2 公尺之間,與 GPS Status 應用程式上所顯示的誤差(Error) 相差不大。表 8 四台平板電腦之平均值
Average N(m) E(m)
4 台平板平均值的平均值 2768646.355 303184.6034 4 台平板平均值的標準差
2.710 2.927
若將 4 台平板電腦分別之 11 次數據平均值擷取出再取標準差,如表 8,可得在 N、
E 坐標上,4 台平板電腦之精度大約分別為 2.710 公尺以及 2.927 公尺。整體而言,同 一裝置前後獲得之數據穩定,同一型號不同裝置之數據較不穩定,推測原因可能是不 同裝置之感測器所能接受衛星訊號的靈敏程度不同所致,但精度 4 公尺左右(如表 8,
N 坐標標準差為 2.71 m,E 坐標標準差為 2.927 m)的行動裝置,仍為可接受之範圍。
(二)平板電腦陀螺儀、電子羅盤之精密度檢驗
相機拍攝瞬間之外方位元素亦包含三軸旋轉角(Compass、Pitch 和 Roll),因此本 研究設計實驗,測試 4 台相同型號 ASUS 平板電腦三軸旋轉角之穩定度。實驗中使用 的應用程式是 Google Play Store 下載之「Angle Cam 角度相機」,此應用程式可記錄 拍攝像片時之三軸旋轉角及經緯度坐標,拍攝之後上述紀錄會直接記錄在.txt 檔中。
本實驗將 4 台平板電腦固定橫放於手機架上保持相同之三軸,每隔 10 秒按下拍攝,
擷取一次數據,共擷取 10 次,最後將數據取平均和標準差,以比較平板電腦內建陀 螺儀之穩定性,實驗結果如下表 9、表 10:
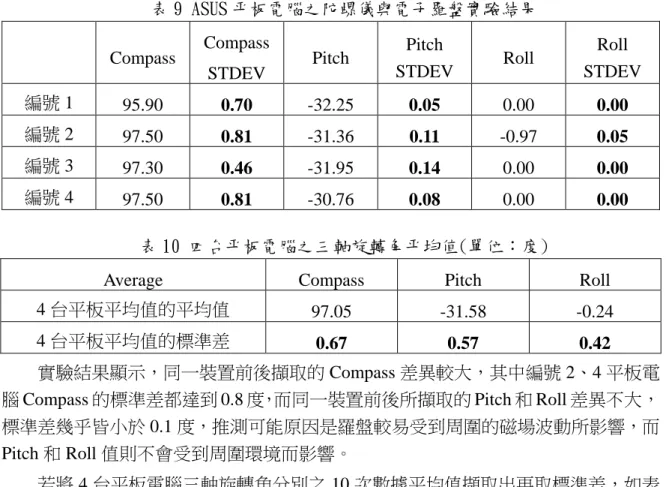
表 9 ASUS 平板電腦之陀螺儀與電子羅盤實驗結果 Compass Compass
STDEV Pitch Pitch
STDEV Roll Roll STDEV 編號 1 95.90
0.70
-32.250.05
0.000.00
編號 2 97.500.81
-31.360.11
-0.970.05
編號 3 97.300.46
-31.950.14
0.000.00
編號 4 97.500.81
-30.760.08
0.000.00
表 10 四台平板電腦之三軸旋轉角平均值(單位:度)
Average Compass Pitch Roll 4 台平板平均值的平均值 97.05 -31.58 -0.24 4 台平板平均值的標準差
0.67 0.57 0.42
實驗結果顯示,同一裝置前後擷取的 Compass 差異較大,其中編號 2、4 平板電 腦 Compass 的標準差都達到 0.8 度,而同一裝置前後所擷取的 Pitch 和 Roll 差異不大,標準差幾乎皆小於 0.1 度,推測可能原因是羅盤較易受到周圍的磁場波動所影響,而 Pitch 和 Roll 值則不會受到周圍環境而影響。
若將 4 台平板電腦三軸旋轉角分別之 10 次數據平均值擷取出再取標準差,如表 10,可得在 Compass、Pitch 和 Roll 上,4 台平板電腦之精度大約分別為 0.67 度、0.57 度以及 0.42 度。因此,整體而言,同一裝置前後獲得之 Compass 數據較不穩定,Pitch 和 Roll 則非常穩定。同一型號不同裝置之 Compass、Pitch 和 Roll 皆較不穩定,但標 準差皆小於 1 度。
(三)利用 e-GNSS 檢驗平板電腦之 GNSS 精確度
確定平板電腦之 GNSS 穩定性之後,利用編號 1 平板電腦與定位精度達公分等級 的即時動態定位系統 e-GNSS 做比較,並以 SONY Z3 手機作為對照組,分析平板電 腦及手機內 GNSS 之精度。
實驗地點設在周圍無遮蔽物且 GNSS 收訊良好之師大操場,選擇 2 個點位(C1、
C2)進行量測。首先架設 1.5 公尺高之 e-GNSS 天線,接著將 e-GNSS 控制器連接至國 土測繪中心進行即時動態定位,坐標數據 fix 之後即可記錄下來。坐標記錄完成後,
將編號 1 平板電腦與 SONY Z3 手機依序置於 e-GNSS 上方,並利用 GPS Status 應用 程式記錄經緯度坐標,最後利用坐標轉換公式將經緯度轉為 TWD 97,實驗結果如表 11 所示:
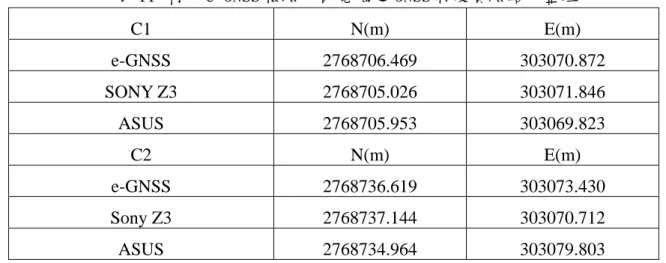
表 11 利用 e-GNSS 檢驗平板電腦之 GNSS 精度實驗結果整理
C1 N(m) E(m)
e-GNSS 2768706.469 303070.872 SONY Z3 2768705.026 303071.846 ASUS 2768705.953 303069.823
C2 N(m) E(m)
e-GNSS 2768736.619 303073.430 Sony Z3 2768737.144 303070.712 ASUS 2768734.964 303079.803
實驗結果顯示,SONY Z3 手機 GNSS 數據與 e-GNSS 較為相近,在 N、E 坐標上 誤差皆在 1-3 公尺左右,ASUS 平板電腦則較為不穩定,如 C2 點位的 E 坐標相差至 6 公尺。
就此 GNSS 實驗結果得知,ASUS 平板電腦之 GNSS 定位精度較 SONY Z3 低,
與 GPS Status 上所顯示之誤差(Error)相符合,原因應是兩台裝置內所使用之 GNSS 感 測器型號不同,導致接收衛星訊號靈敏程度不同所致,因此 SONY Z3 手機較 ASUS 平板電腦更為適合應用於近景攝影測量。
五、結論與後續研究
本研究進行行動裝置應用於近景攝影測量之內、外方位參數精度分析,實驗所得 結果如下:
(一)內方位參數率定結果
本研究使用 iWitness 近景攝影測量軟體進行平板電腦與手機拍攝之像片率定。結 果顯示同一型號之 4 台不同平板電腦之間的內方位參數都不盡相同,推測可能原因為 在鏡頭裝配過程當中之人為誤差所導致。SONY Z3 手機之焦距約為 ASUS 平板電腦 的 2 倍,像主點位移量皆大於平板電腦,對稱輻射畸變差係數(𝐾1, 𝐾2, 𝐾3)則皆小於平 板電腦。但整體而言,同一台裝置前後兩組像片之內方位參數差異不大,非常穩定。
(二)內建定位定向感測器精度探討
本研究將使用直接地理定位定向獲取外方位參數,因此設計實驗探討平板電腦和 手機之外方位參數精度。GNSS 精度方面,結果顯示同一裝置前後獲得之數據穩定,
同一型號不同裝置之數據較不穩定,N、E 坐標上,4 台平板電腦之精度大約分別為 2.710 公尺以及 2.927 公尺,推測原因可能為不同裝置之感測器所能接受衛星訊號的 靈敏程度不同所致。
利用 e-GNSS 檢驗平板電腦及手機之 GNSS 精度方面,結果顯示 SONY Z3 手機
GNSS 數據與 e-GNSS 較為相近,在 N、E 坐標上誤差皆在 1-3 公尺左右,ASUS 平 板電腦則較為不穩定,需要更長的時間接收衛星訊號將數據 Fix。
陀螺儀及電子羅盤精度方面,同一平板電腦前後擷取的 Compass 較不穩定,Pitch 和 Roll 則非常穩定,標準差幾乎皆小於 0.1 度,推測可能原因為羅盤較易受到周圍的 磁場波動所影響,而 Pitch 和 Roll 值則不會受到周圍環境而影響。而同一型號不同裝 置之 Compass、Pitch 和 Roll 皆較不穩定,但標準差皆小於 1 度。
(三)後續研究
本研究確認同一行動裝置內建相機之內方位參數之穩定度,且確認行動裝置內建 設備之精度應足以使用於近景攝影測量之直接地理定位定向,惟拍攝時須注意周圍有 無可能的磁場波動影響。因此,後續之研究則將利用相機率定求出之內方位參數,配 合直接地理定位定向求出之外方位參數,使用 Imagine Photogrammetry 商業軟體組成 立體模型,利用前方交會原理量測點位的三維坐標,並以使用全測站經緯儀直接進行 地面測量求出地面物之三維坐標作為對照組,比較量測之精度。
致 謝
本研究部份承蒙科技部大專生計畫(NSC 104-2815-C-003-068-M)輔助得以完成,
謹申謝忱。
參考文獻
吳笛豪,2008,應用近景攝影與地面雷射掃描餘地物量測精度及三違建模之研究,
國立高雄應用科技大學土木工程與防災科技研究所碩士論文。
周尚弘,2005,GNSS 與 INS 結合同軸數位量測相機之外方位精度分析,國立成功大 學地球科學研究所碩士論文。
鄒芳諭,2010,以非量測性相機進行近景攝影測量探討,國立交通大學土木工程學 系碩士論文。
Arias P., J. Herraez, H. Lorenzo, C. Ordonez, 2005, Control of structural problems in cultural heritage monuments using close-range photogrammetry and computer methods, Computers and Structures, 83, pp.1754-1766.
Wolf P. R. and B. A. Dewitt, 2000, Elements of Photogrammetry with application in GIS, 3rd Edition, McGraw-Hill.
ASUS, 2015, ASUS MeMO Pad 8 產品規格, http://www.asus.com/tw/, Last Checked 2017/05/05.
SONY, 2014, White paper Xperia Z3, http://developer.sonymobile.com/tw/, Last Checked 2017/05/05.
Vol. 6, No. 1, pp. 15 ~ 30
臺灣海潮負載效應於測量改正計算之研究
黃鉅富
1*論文收件日期:106.05.31 論文修改日期:106.09.20 論文接受日期:106.10.09
摘 要
臺灣海潮負載(OTL)效應之數值推估重力模式 SGOTL(Hwang and Huang, 2012)、位移模式 DISOTL(Hwang and Huang, 2013)已分別開發完成,並對外發表 網頁,提供各界進行 OTL 效應改正線上計算服務,特別是對於海潮變化較大的 近岸測站,利用該模式改正後之觀測成果,精度確實獲得改善。
由於臺灣海峽週邊海潮效應明顯,分析馬祖 GPS 站之徑向各分潮振幅合量 最高可達 5.5 cm;新竹超導重力站之各分潮振幅合量約有 11 μgal,對於高精度 測量產生不小影響,有改正必要。
本文除發表內政部公告 219 個一等衛星控制點(GPS 連續觀測站)之 OTL 計 算服務外,也進行 OTL 對於精密單點定位(Precise point positioning, PPP)技術計 算成果影響與改正之研究。
關鍵詞:DISOTL、SGOTL、重力測量、海潮負載、精密單點定位、衛星定位
1
1 科長,內政部地政司;博士,國立交通大學土木工程學系。
* 通訊作者,TEL: (02)2356-5270,E-mail: [email protected]。
The study of ocean tide loading corrections in Taiwan
Jiu-Fu Huang
1*Abstrat
A numerical model to compute SGOTL (gravity) (Hwang and Huang, 2012) and DISOTL (displacement) (Hwang and Huang, 2013) resulting from ocean tide loading (OTL) had been successfully developed, and online computation service was released, especially for coastal stations with large ocean tides.
By use of this mode, the accuracy of observation is indeed improved. Around the Taiwan Strait, OTL-induced vertical displacement of Matsu GPS station can be up to 5.5 cm, and the gravity of Hsinchu superconducting gravity Station is about 11 μgal, where such large OTL effects will have a profound influence on the precise measurements.
Ministry of the Interior (MOI) announces a new set of geodetic datum and TWD97 coordinates at 2010. In the study, online service of OTL computation at 219 first-order GPS continuous stations has been released and the accuracy of precise point positioning (PPP) derived coordinates affected and modeled by OTL were analyzed.
Keywords: DISOTL, Gravimetry, Ocean tide loading, Precise point positioning,
Satellite positioning, SGOTL2
1Section Chief, Department of Land Administration, Ministry of the Interior; Ph. D., Department of Civil Engineering, National Chiao Tung University.
一、前 言
海潮負載(ocean tide loading, OTL)效應,指地球受海水質量引力變化影響所 造成之變形(deformation)情形(Huang, 2012)。由於月球、太陽天體運行,直接對 地球上各海水質點產生引力變化,形成海水質量來回不斷重新分布之週期性海 潮現象,除對地表上各點產生不同牛頓引力效應(Newtonian effect)外,亦因地 球非屬絕對剛體(彈性體),於是有了週期性的彈性效應(elastic effect),而這些效 應 原 則 上 可 以 精 密 測 量 方 法 獲 得 , 並 可 區 分 為 重 力 (gravity) 、 位 移 (displacement)、傾斜(tilt)、應變(strain)及垂線偏差(deflection of the vertical)等不 同型態,皆屬海潮負載效應。
由於高精度(達 μgal 級)重力測量設備技術已獲得實現,海潮負載效應對於 觀測數據影響,已不容忽視,需藉由海潮負載理論模式進行觀測改正,又考量 理論模式與區域特性之差異,相關理論方法亦有先行評估驗證之必要,以獲得 較佳成果(Shum et al., 1997; Yamamoto et al., 2001; Baker and Bos, 2003; Boy et al., 2004; Neumeyer et al., 2005; Hwang et al., 2009);此外,全球衛星定位測量技 術已廣泛地運用於氣候變遷及地球動力相關研究,例如:板塊運動(plate motion)、冰期後地殼反彈(post glacial rebound)、全球海水面變化(sea level change) 等,根據筆者研究指出,GPS 相對定位要達到 cm 級精度時,即需要考慮儀器 與環境效應,其中包括海潮負載(OTL)所產生的位移變形。
內政部自 1993 年起運用 GPS 測量方法建立全國大地控制網,並自 2003 年 起陸續引進絕對重力儀、超導重力儀等精密設備實施全國重力網,由於內政部 測量成果要求一等精度規範,評估有必要進行海潮負載改正,足以依法作為國 內實施重力測量及 GPS 測量之依據。因此,筆者針對重力、位移之海潮負載效 應進行相關研究,提出高解析且高程相依之海潮負載效應計算方法,有關推導 高程相依理論公式、開發彈性運用模式、使用較新海岸線資料、區域海潮模型 等,皆是國內首次研究亦是重要特色。
二、臺灣海潮負載效應之區域特性分析
圖 1 顯示 13 個鄰近台灣的 IGS 站及附近 M2 分潮(NAO99b)分布圖,其中 包括位於台灣的 TWTF、TNML,位於大陸的 SHAO、WUHN、XIAN、KUNM、
LHAS,位於日本的 TSKB,位於南韓的 DAEJ,位於菲律賓的 PIMO,位於泰 國的 CUSV,位於關島的 GUAM,及位於馬紹爾群島(Marshall Islands)的 KWJ1 等站。根據圖中 M2 海潮強度分析,西太平洋地區以台灣海峽(近大陸東南海 岸)、南北韓交界西側黃海(近北緯 38 度)的振幅最強,約有 2.4 公尺;其次者為 大陸黃海北部(上海杭州灣外)、緬甸西南部海域,約有 2 公尺;泰國至緬甸間 大陸礁層水域較淺,至少有 1 公尺;至於大陸南海(菲律賓西部)、日本海(日本 西部)及太平洋海(關島、馬紹爾群島間)之海域,附近 M2 海潮並不明顯;而台 灣地區東部太平洋與西部台灣海峽之海潮變化快速,導致此地區的 OTL 位移影
響特別明顯(Huang, 2012)。
圖 1 台灣附近 13 個 IGS 站及 M2 海潮之分布圖
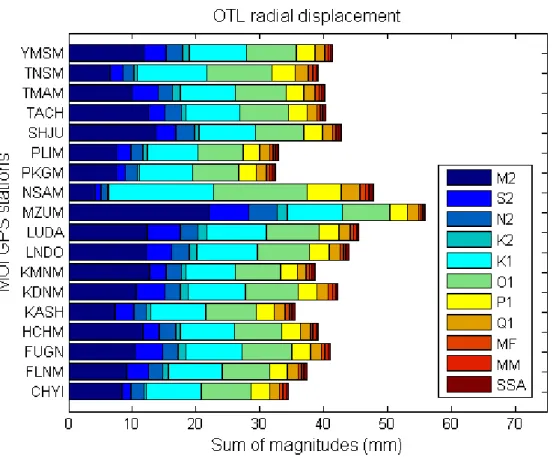
Huang(2012)參考相關文獻方式,以 8 個主要短週期分潮(M2、S2、N2、
K2、K1、O1、P1、Q1)加上 3 個長週期分潮(MF、MM 及 SSA)之振幅合量,作 為測站受 OTL 影響程度的評估指標。內政部 18 個 GPS 站之 11 個 OTL 主要分 潮的振幅情形,經計算結果如圖 2 至圖 4。其中,徑向分量部分,MZUM(馬祖) 站因附近 M2 海潮最大,其 M2 分潮影響約 2.0 公分,且該站的 11 個分潮合量 達 5.5 公分,也是 18 個站最大的;其餘站的合量約 3.0 ~ 4.5 公分,最小值則位 於 PLIM (埔里)及 PKGM(北港)站。另外,各測站東西向分量約在 2.0 至 2.7 公 分間,差異不大,最小值則位於 KMNM(埔里)及 NSAM(南沙太平島)站。至於 南北向分量,大致約 1.2 ~ 1.5 公分,各測站差異極小,最大值位於 CHYI(嘉義) 及 PKGM(北港)站。
大致上,內政部 18 個 GPS 站皆以徑向合量效應最強(MZUM 站約 5.5 公 分),其次為東西向(SHJU 站約 2.7 公分),南北向(CHYI 站約 1.5 公分)。一般僅 就離岸遠近的條件而言,OTL 徑向位移合量會往內陸方向逐漸減弱,但由於台 灣面積小(約 3 萬 6 千平方公里),其影響差異並不會太大,以較為內陸的 PLIM、
PKGM 站為例,OTL 徑向位移合量確實較小,然而因為台灣東臨太平洋、西臨 台灣海峽的特性,也有 3.0 公分影響。換言之,利用國內 GPS 衛星追蹤站約制 解算高精度相對定位測量成果時,以精確的模式來改正 OTL 位移效應影響,確 實是非常重要的研究課題。
圖 2 TWD97【2010】大地基準之海潮負載位移效應評估(徑向分量)
圖 3 TWD97【2010】大地基準之海潮負載位移效應評估(東西分量)
圖 4 TWD97【2010】大地基準之海潮負載位移效應評估(南北分量)
三、SGOTL 及 DISOTL 模式改正線上計算
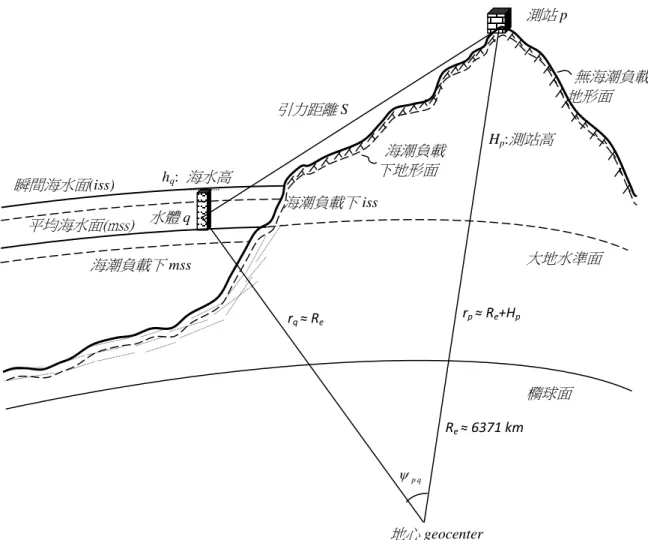
由於海潮負載(OTL)效應的引力源來自海水質量,因此根據牛頓萬有引力 定律,可以將測點以外全球海水面上波浪海潮質量進行引力源積分,如圖 5 所 示。至於各海水質點 q 對任意測站 p 點產生的直接引力位 T 公式如下:
D
q pq p
e p e
e q w
D q p
p
p
d
r R r R
R G h
S r Gdm
T
cos 2
) , ,
( 2 2 2
2
..……….…(1)
pq: 指各海水質點q
(
q,
q)與任意測站 p 點間的球距角度,其中
q,
q分別為 q 點所在緯度及經度坐標。h : 指海水質點 q 於平均海水面(mean sea level)上之潮高。
q
w: 指海水平均密度(本研究使用 1,030 kgm-3)。G: 指牛頓萬有引力常數,可以地球平均質量 M 及平均加速度 g 組合替代之。
R
e: 指測站 p 點附近高斯球面之平均半徑。D: 指以整個球體為範圍之球積分域。
d
q: 指積分單位,相當於d
q
cos
qd
qd
q,在球面上相當於dSq Re2d
qr : 指測站 p 點至地心間的距離,近似於 R
p e+ H
p;其中 Hp 指 p 點所在正高(指 垂直於大地水準面上之幾何高)。圖 5 測點與海水質點間產生海潮負載效應示意圖(修改自 Huang, 2012) Huang(2012)已依測點與海水質點間產生海潮負載(OTL)效應關係,成功開 發數值推估模式 SGOTL(重力)、DISOTL(位移),特別是對於海潮變化較大的近 岸測站,利用該模式改正後之觀測成果,精度確實獲得改善。該模式特別考慮 與測站高程相依之 OTL 格林函數,除使用不同解析之區域、全球海潮模型,分 別積分計算測站近(內圈)、遠(外圈)區網格之牛頓引力(Newtonian)及彈性(elastic) 效應,並針對內圈範圍大小及網格間距進行效能測試,且積分所需海陸遮罩網 格來自於高解析之海岸線資料庫及數值地形模型,以提高解算精度。根據新竹 超導重力站及部分離島絕對重力觀測資料驗證結果,SGOTL 模式與國外部分既 有模式如:OLFG/OLMPP(Scherneck, 1991), SPOTL(Agnew, 2013), GOTIC2 (Matsumoto et al., 2005)及絕對重力儀設備(FG5)中內建的 g7.0 軟體
(http://www.microglacoste.com/)相比表現較佳,OTL 重力效應於新竹超導重力站 可達0.1 μgal 級精度,且各分潮效應合量約 11 μgal。
此外,有關 DISOTL 模式推估 OTL 位移效應,以內政部新竹及馬祖衛星追 蹤站(GPS)資料驗證結果,OTL 效應可推估達 1 mm 級精度。另分析 13 個鄰近 台灣的 IGS 站區域特性,西太平洋 KWJ1 站(位於馬紹爾群島)之徑向分量合計
瞬間海水面(iss)
Re ≈ 6371 km (not to scale) 平均海水面(mss)
無海潮負載 地形面
hq: 海水高
引力距離 S
海潮負載 下地形面
測站 p
海潮負載下 mss
海潮負載下 iss
地心 geocenter
橢球面 大地水準面
p q
Hp:測站高
rp ≈ Re+Hp
rq ≈ Re
水體 q
可達 8.5 cm;因此,OTL 位移效應對於高精度之定位測量技術,確實產生不小 影響,有予改正必要。以近岸及部分離島地區之 GPS 連續實測資料,進行 OTL 位移效應改正測試,其連續坐標解之標準偏差值明顯下降,最大可獲得 35%改 善幅度。
臺灣 OTL 效應之數值推估模式 DISOTL(位移)、SGOTL(重力)計算服務網 已開發完成,並於 2013 年「第 32 屆測量及空間資訊研討會」發表(https://
gps.moi.gov.tw/SSCenter/CalculateProcess/otl4prdt/Runotl4prdt.aspx,圖 6,本文改版後 畫面),提供各界進行 OTL 改正線上計算(含地球質量中心修正 CMC 與否)服 務;由於臺灣海峽週邊海潮負載效應明顯,分析馬祖及台中港 GPS 站之徑向各 分潮振幅合量最高達 5.5 及 4.0 cm,對於高精度測量產生不小影響,特別是針 對海潮變化較大的近岸測站,利用該模式改正後,觀測成果精度確實獲得改善 (黃鉅富等,2013)。
圖 6 OTL 效應改正於臺灣大地基準站之計算服務頁面
四、一等衛星控制點(GPS 連續站)之海潮負載影響與改正
臺灣地區 1997 大地基準(TWD97)及參考坐標系統之訂定,係採用衛星定 位測量技術,由內政部於 87 年 3 月 17 日函頒,嗣後於 96 年 11 月 15 日訂 定基本測量實施規則時,將大地基準及國家坐標系統納入該規則第 6 條規定,其 地 心 坐 標 框 架 及 參 考 橢 球 體 分 別 採 用 ITRF94(International Terrestrial Reference Frame, ITRF)及 GRS80。由於國內衛星追蹤站及各級控制點 TWD97 坐標,已歷經 10 餘年,其間因地殼板塊移動產生地殼變動、921 地震及莫拉 克風災等影響,長時間累積下,部分地區點位已產生明顯之位移,無法符合目 前測繪之精度需求,內政部公告最新的大地基準及坐標系統 2010 年成果,簡 稱為 TWD97【2010】,內容包括衛星追蹤站 18 站、一等衛星控制點(GPS 連續 站)219 點、一等衛星控制點 105 點、二等衛星控制點 569 點及三等衛星控制點 2,102 點,共計 3,013 點位成果。其中一等衛星控制點(GPS 連續站)係基於資源 共享理念,考量國內作業需要及空間分布情形,選自目前交通部中央氣象局、
經濟部中央地質調查所、經濟部水利署、中央研究院地球科學研究所、彰化縣 政府、花蓮縣政府、健行科技大學、中華電信股份有限公司電信研究所等 8 個 機關學校站台,公告其坐標成果提供各界辦理控制測量作業使用(圖 7)。
圖 7 一等衛星控制點(GPS 連續站)於臺灣通用電子地圖分布情形
本文延續運用 DISOTL、SGOTL 模式,於原有 OTL 計算服務網頁,增加 TWD97【2010】其中 219 個一等衛星控制點(GPS 連續觀測站)之振幅與相位係 數及瞬時改正量計算服務,協助各界即時計算 OTL 效應模式改正,提高重力及 衛星定位測量觀測精度。圖 8 是以台中港衛星追蹤站(TACH)為例,在輸入起始 時間 2010 年 1 月 1 日 0 時 0 分,結束時間 2011 年 1 月 1 日 23 時 0 分,並以每 60 分鐘為間隔計算出每個時點之 OTL 重力(μgal)、徑向、東西及南北分量位移 (mm)等 4 項改正數;另圖 9 呈現該站 2011 年 1 月 1 日之每小時徑向 OTL 改正 數時序變化情形,其中半日分潮及全日分潮之效應影響相當明顯。圖 10 是以馬 祖(MZUM)站為例,在輸入起始時間 2011 年 1 月 1 日 0 時 0 分,結束時間 2011 年 1 月 2 日 0 時 0 分,並以每 60 分鐘為間隔計算出每個時點之 OTL 重力(μgal)、
徑向、東西及南北分量位移(mm)等 4 項改正數;另圖 11 呈現馬祖(MZUM)站 2011 年 1 月 1 日至 10 日之 4 項改正數時序變化情形,其中半日分潮及全日分 潮之效應影響相當明顯。此外,本文前章介紹圖 2 至圖 4 內容已分析國內 18 個衛星追蹤站之 OTL 位移影響程度,可提供國內高精度定位解算選擇參考約制 站之參考。因此,於高精度之測量技術上(如 SG、AG、GPS、SLR),尤其是觀 測時數資料不足時,如何以模式方法消除其 OTL 效應影響,顯得非常重要(Penna et al., 2008),而本文線上計算服務便可有效協助處理相關改正。
圖 8 台中港衛星追蹤站(TACH)之 OTL 重力(μgal)、徑向、東西及南北分量位移
圖 9 台中港衛星追蹤站(TACH)2010 年 1 月 1 日每小時徑向 OTL 改正量(m)時序變 化情形
圖 10 馬祖 MZUM 站之 OTL 重力(μgal)、徑向、東西及南北分量位移(mm)改正數 (2011 年 1 月 1 日至 2 日,每 60 分鐘間隔)
m
圖 11 馬祖 MZUM 站之 OTL 改正數時序變化情形(2011 年 1 月 1 日至 10 日)
五、精密單點定位技術之海潮負載效應影響與改正
有關 OTL 效應影響與改正研究,Huang(2012)曾以近岸及部分離島地區之 GPS 連續實測資料,利用載波相位觀測量差分計算每 3 個小時解,進行徑向 OTL 位移效應改正測試,其連續坐標解之標準偏差值明顯下降,最大可獲得 35%
改善幅度。本研究另使用 GIPSY_6.3 軟體進行精密單點定位解算(Precise Point Positioning, PPP)進行評估,改採直接處理載波單點定位觀測量,並以雙頻觀測 量的線性組合消除大部分電離層相對誤差,至濕對流層延遲量估計則另以未知 參數來估算(黃鉅富等,2014)。另衛星軌道的偏差及衛星時表誤差,則以精密 星曆與精密衛星產品改正,而接收機的天線相位中心改正,使用 IGS 所提供的 天線型號資料;固體潮則使用 WahrK1 PolTid 模型進行改正。
圖 12 顯示 2010 年 1 月 1 日台中港衛星追蹤站(TACH)每小時 PPP 解之徑 向 OTL 影響與改正時序變化情形,除採用 DISOTL 模式改正外,另以 EOT11a、
NAO99b 模式進行比較;圖 13 顯示 2010 年 1 月 1 日至 3 日 TACH 站每 3 個小 時 PPP 解之徑向 OTL 影響與改正時序變化情形。所有解均減去 TWD97【2010】
公告值(m)以利分析並方便呈現。
圖 12 TACH 站 2010 年 1 月 1 日每小時(24 筆)精密單點定位解之徑向 OTL 影響與 改正後(m)時序變化情形(減去 TWD97【2010】公告值)
圖 13 TACH 站 2010 年 1 月 1 日至 3 日每 3 小時(24 筆)精密單點定位解之徑向 OTL 影響與改正後(m)時序變化情形(減去 TWD97【2010】公告值)
以圖 12 成果分析,2010 年 1 月 1 日 TACH 站每小時徑向 OTL 影響最大可 達 4.0 cm(DISOTL),但 GIPSY_6.3 軟體計算每小時 PPP 解(OFF)之標準偏差值 約 4.9 cm,最大偏差可達 14.8 cm,再以 DISOTL、EOT11a、NAO99b 模式分 別改正結果(OFF - *)大致相符,各種 OTL 改正後之定位精度皆未有顯著改善。
另分析圖 13 成果,2010 年 1 月 1 日至 3 日 TACH 站每 3 個小時徑向 OTL 影響 亦為 4.0 cm(DISOTL),由於該測試之觀測時間(3 日)及資料取樣(3 小時)均增 加,整體 PPP 解(OFF)之標準偏差值降至 1.9 cm,最大偏差降至 6.0 cm,定位 精度明顯提高;再以 OTL 改正(OFF - DISOTL)後之標準偏差值降至 1.0 cm,改 善幅度約有 47%,成效顯著。
(m)
(m)