子計畫一:大型網狀系統之軟體與硬體測試環境(1/3)
計畫類別: 整合型計畫
計畫編號: NSC92-2213-E-002-045-
執行期間: 92 年 08 月 01 日至 93 年 07 月 31 日 執行單位: 國立臺灣大學電機工程學系暨研究所
計畫主持人: 傅立成
計畫參與人員: 許書豪,黃正民,游名沂,徐毓伯
報告類型: 精簡報告
報告附件: 出席國際會議研究心得報告及發表論文 處理方式: 本計畫可公開查詢
中 華 民 國 93 年 6 月 1 日
期 中 報 告
委託計畫: 具多個互動型動態代理器之大型網狀混合式控 制系統
委託機關單位: 國家科學委員會
執行機關與單位: 國立台灣大學
計畫編號:NSC 92-2213-E-002-045
主持人:傅立成 教授
中華民國九十三年五月
中英文摘要
(一) 計畫中文摘要
關鍵詞:動態代理器、行動輪式機械人、網路聯界結、軟硬體測試平台
一個動態系統的感測器及致動器傳統上均以專線(hard wire)透過某種型式 A/D 及 D/A 及個人電腦之 CPU 或單晶片控制器(卡)相聯,其中所需之控制演算法泰半能以即時 方式完成運算,但由於網路技術日新月異、突飛猛進,該專線連結近來漸有以網路連結 方式取而代之,尤其是當需連結之單元數相當龐大時,上述取代已別無選擇。不過網路 連結方式傳統上欲達到即時反應的要求的困難度高,勢將造成控制效能上的負擔,不過 直觀上只要網路頻寬無限制提昇,則即時控制即不再是空談,但殊不知前者在目前現階 段並不可能,而此種限制亦可透過巧妙地重新設計控制器的架構、控制演算法、與控制 邏輯來達到殊途同歸的效果。本整合型計畫的目的即在探討與驗證上述的可行性。
子計畫一在本大型計畫中扮演中心引導、整合各其他子計畫成果的角色,目標係提 供各子計畫理論、技術測試、驗證的平台,當然初期亦可作為各子計畫執行的動機來源。
此平台的提創、開發與製作在此三年的計畫中將循序漸進。初期、本子計里將首先提出 一個具互動、動態子系統的大型網狀系統,為使其具相當代表性,將考慮以行動輪式機 械人(mobile manipulator)作為動態代理器,其中輪式機械人部分可作平面移動及旋 轉,而機械臂則為多軸,此代理器設有一局域性控制器(local controller),可控制車 體與機械臂。此等多個自走式機械臂將試圖合作將一大型物件合力移動,其中移動的軌 跡可由一遙距的控制器以網路連結的方式動態控制各個代理器的機械臂、抑或各代理器 之間亦透過網路協調彼此間的互動,藉由其間力的動態平衡達到各代理器及物件的穩定 性。此系統的穩定性明顯將繫於網路頻寬,是以大型網狀系統將完全符合整合型計畫所 需。
在第一年提出並分析各代理器之架構後,將同時製作其 prototype,第二年,本子
計畫將製作一大型軟體模擬系統以供各子計畫透過網路方式上線模擬測試,第三年則實 際製作多個代理器, 屆時各子計畫將實地驗證其所提出之理論。
(二)計畫英文摘要
Keyword : Dynamic Agent, Mobile manipulator, Network Linkage, Software and hardware testing platform
Traditionally, the sensing subsystem and actuation subsystem are linked to the main CPU of the control computer or some single-board micro-controller through some hardwiring and A/D, D/A converters. As a result, the control algorithms can mostly be completed in real time. Recently, due to dramatic renewal and improvement of the network technology, it is becoming a trend to replace the above hardwire links by the network links, and it becomes an indispensable choice especially when the number of units to be linked is enormous.
However, it is well known that the real-time response is hardly come by from the network linkage, which thereby causes burden in the overall control performance. Intuitively, the resolve the real-time control dilemma is to arbitrarily increase the bandwidth of the network. But the current technology, however, did not support this request, and in fact such a problem can be overcome though ingeniously redesign of the control architecture, the control algorithm and the control logic. This subproject is solely to investigate and to verify the possibility of the mentioned solution alternative.
This subproject, among the present integrated project, is to play the role of guiding the research of and integrating all the results from other subprojects.
Specifically, the goal of this subproject is to provide a platform to test and to assess the theoretical results and technological developments. Of course, this subproject can also have a role in highly motivating all the execution of other subprojects. The proposition and development of this platform will proceed
in this three year integrated project step by step. In the beginning period, this subproject will propose a large scale networked system consisting of multiple interactive dynamic subsystems. An excellent choice is to choose a mobile manipulator as a dynamic agent, where the mobile vehicle can move in a plane and can rotate whereas the manipulator can have three joints, i.e., with three degree-of-freedoms (DOF’s). Furthermore, each agent will have its own local controller to control the vehicle and the manipulator. These many agents will then cooperate to move a huge piece of large object, and the motion trajectory of the object as well as of each agent will be determined by a remote controller through wireless network or be determined after negotiation among various relevant agents. It is crucial that this dynamic network communication will guarantee the force balance in a dynamic manner and in turn lead to full stability of the large object as well as each relevant agent. It is noteworthy that the stability of the overall system has a strong tie with the bandwidth, and therefore the present system indeed will fulfill the need by the present integrated project.
After we have proposed the architecture of the agent in the first year, we will build the prototype at the end of the same year. Next, in the 2nd year we will develop a large scale simulation software to facilitate every subproject to assess its result on-line. On the 3rd year, we will develop multiple prototype agents, so that all the subprojects can evaluate their results performance experimentally and physically.
目錄
一、 計畫研究背景及目的………7
二、 研究方法、進行步驟及執行進度………11
三、 完成之工作項目及成果………16
1. 硬體架構………16
2. 機構設計………27
3. 通訊系統………34
4. 及時影像追蹤系統………47
四、 計畫成果自評………82
五、 附錄………83
(一)研究計畫之背景及目的
由於網路技術日新月異,使得現代控制系統的感測器與致動器常常藉由網路連接至 遠端之電腦或單晶片控制器,以達成控制目標。像是工廠環境裡的生產自動化以及日常 中活中的智慧型大樓,便是該技術應用的典型。由於該類控制系統基於控制網路 (Control network)而具有多方通訊的特徵,故又稱之為網型控制系統(Networked control systems)。近年來隨著網型控制系統日趨龐大,傳統的網路連結方式將使這樣 的控制系統產生資訊傳遞出現時間延遲(Time delay)或是遺漏的現象,導致控制效能出 現沉重負擔。[1]曾就多種網路型式依照控制網路的特性提出評估,結果發現一般的資 訊網路(Information network)架構,如乙太網路(Ethernet),並不適合做為控制網路 之用。[2], [3]曾經應用李雅普諾夫法(Lyapunov approach)提出最大通訊時間間隔的 估計方法,並且成功地將之應用於具撓性關節的機械臂以及蒸氣渦輪的控制上。而[4]
曾討論當網型控制系統一旦出現資訊傳遞的時間延遲,其所能容忍之最大時間延遲的範 圍。由上述文獻清楚可見,網路通訊的品質將會影響到網型控制系統的性能,尤其當系 統規模越大,上述的影響將會越顯著。而於吾人設計的控制演算法是否能充分克服網路 通訊帶來的問題,將是目前控制系統研究的重要課題。本子計畫目的即在於設計由多個 互動的動態子系統所構成之大型網狀系統,以供其餘子計畫進行理論驗證誡與測試之 用。其中動態子系統在此選為行動輪式機械人,而互動性則緣自於此等機械臂的合力完 成一大型物件之搬運,由於彼此間的通訊係透過網路,因此網路的特性與系統的穩定性 與效能有著密切之關係,是以,此類大型系統正符合本整合型計畫探討所需。
由於過往機器人學(Robotics)的研究出現許多進步,使得機器臂得以大量應用於生 產自動化系統方面 [5], [6]。為了加大機械臂的工作空間,[7]考慮將機械臂裝置在輪 式機械人之上形成行動輪式機械人(Mobile manipulators),突破過往機械臂之基底固 定於地面所帶來的侷限。尤其當多個自走式機械臂整合為合作型機器臂(Cooperative robots)之工作團隊時,將可以發揮更大的工作能力,例如彼此合作將大型物件合力搬 動至遠方,其中每個行動輪式機械人將結合代理器(Agent)的設計,使得彼此維持一定
的安全距離之下完成工作。在相關的研究中,被搬移物件與合作型機器臂之間的運動學 (Kinematics)關係皆假設已知,可是被搬遷的物件在實際的問題中往往具有不確定性,
使得該假設並不容易成立。由於電腦視覺(Computer vision)的進步,帶動機器人視覺 技術的興起[8]。為了解決上述問題,我們認為可以利用機器人視覺技術協助具自走性 的合作型機器臂達成自我調整的效果,以完成搬移物件的最終目標。其中機器人視覺技 術從影像所判讀的資訊將透過一個遙距控制器(Remote Controller)以網路連結的方式 動態地回應給各自走性機械臂的代理器,而後再藉由各機械臂上的控制器達到力的動態 平衡以及及被搬移的物件的穩定性。值得注意的是,此刻的遠距控制器將扮演指揮者 (Supervisor)的角色,而非直接控制眾自走性機械臂的行動,使得整個閉迴路動態系統 產生混合式控制系統(Hybrid control system)的特徵。這樣的技術一旦的發展成熟,
可以立即應用於生產自動化系統以及智慧型大樓系統中,提供物料搬運以及保全看護。
截自目前為止,有許多典型的機械臂機構已經被提出,如卡式座標型機械臂 (Cartersian robot) 、 選 擇 性 順 從 組 裝 機 械 臂 (SCRAC robot) 以 及 關 節 型 機 器 臂 (Articulated robot) [8]。機械手臂基本上可以分為為三軸本體機構的設計和末端功 能器(End-effecter),前者帶動後者以發揮一定的效能。為了能使機械臂確實能抓握物 件,可替換的模組化之末端功能器(End-effecter)係常見的設計,例如各式夾爪可以用 在不同尺寸物件的搬運與組合。此外,隨著電子技術的發展,嵌入式系統(Embedded system)的技術漸趨成熟,體積小而功能完整、強大,已經廣泛運用於個人數位助理 (Personal digital assistant)與小型機構中。本子計畫所謂的動態代理器將是行動輪 式機械人的控制核心,其中機械臂的結構即採上述三軸設計外加夾爪,而代理器將採用 嵌入式電腦作為其核心平台。此外,為了能在直接投諸於若干個代理器硬體製作前即能 預先分析整體的效能,建構軟體模擬平台無疑是一必要的步驟,亦即將自走性合作型機 器人相關的控制演算法寫成控制程式,並加入實際硬體操作與環境因素的考慮,據此整 合設計成一模擬平台,讓多個使用者可同時經由此一平台之互動介面,測試並模擬實際 狀況,進一步提供控制方法與硬體實現改進的參考,其中可以分為下列項目考慮:使用
者操作介面、網路模擬介面以及模擬程式的選擇與應用。
最後,本子計畫所擬設計之大型系統內將以無線網路,作為系統內遙距控制器與各 代理器以及各個代理器之間交換資訊的媒介。[1]的研究中發現控制網路的特性大大不 同於一般資訊網路,因此在具多個互動型動態代理器之大型網狀混合式控制系統的問題 中,應該注意將可能的工作及訊息封包分別依照其重要性及緊急性,列出由高到低的優 先順序(Priority),系統應要先執行愈重要或愈緊急的工作。尤其在輸出暫存器(Output Buffer)和輸入暫存器(Input Buffer)裡,應該要依照重要性和緊急性來排列處理訊息 封包的順序,愈緊急或愈重要的訊息封包,則系統應該要優先傳送或優先接收處理。當 各代理人搶奪網路傳輸通道時,應該依照各代理器欲傳輸的訊息的重要性來作給予傳輸 通道順序的依據,即第i個代理器欲傳輸的訊息封包較第j個代理器欲傳輸的訊息封包 重要,則應讓第i個代理器較先傳輸訊息封包[9], [10], [11]。
參考文獻
[1] F.-L. Lian, J. R. Moyne, and D. M. Tibury, “Performance Evaluation of control networks: Ethernet, ControlNet, and DeviceNet,” IEEE Control Systems Magazine, pp.66-83, 2001.
[2] G. C. Walsh, O. Beldiman, and L. G. Bushnell, “Asymptotic behavior of nonlinear networked control systems,” IEEE Trans., Automat. Contr., pp 1093-1097, 2001.
[3] G. C. Walsh, H. Ye and L. G. Bushnell, “Stability analysis of networked control systems,” IEEE Trans. Control Syst. Technol., pp 438-446, 2002.
[4] W. Zhang, M.S. Branicky, and S. M. Phillips, “Stability of networked control systems,” IEEE Control Systems Magazine, pp. 84-99, 2001.
[5] J.-H. Jean, and L.-C. Fu, “Adaptive hybrid control strategies for constrained robots,” IEEE Trans. Automat. Contr., pp 598-603, 1993.
[6] J-H. Jean and L.-C. Fu, “An adaptive control scheme for coordinated multimanipulator systems,” IEEE Trans. Robotics and Automat, pp. 226-231, 1993.
[7] Q. Yu, and I.-M. Chen, “A general approach to the dynamics of nonholonomic mobile manipulator systems,” Journal of Dynamic Systems, Measurement, and Control, pp. 512-521, 2002.
[8] R. J. Shilling, Fundamentals of Robotics, Prentice-Hall, 1998.
[9] C. Lu , B. M. Blum , T. F. Abdelzaher , J. A. Stankovic , and T. He , “RAP:
A Real-Time Communication Architecture for Large-Scale Wireless Sensor Networks,” IEEE , 2002.
[10] Aad and C. Castelluccia , “Differentiation Mechanisms for IEEE 802.11,” IEEE INFOCOM 2001, Anchorage, Alaska, April, 2001.
[11] S. Choi and K. G. Shin, “A Unified Wireless LAN Architecture for Real-Time and Non-Real-Time Communication Services,” IEEE/ACM Transactions on Networking , 8(1) , February 2000.
(二)研究方法、進行步驟及執行進度
由於本子計畫旨在提供各個子計畫研究方法的軟、硬體測試平台,也因此計畫的 內容暨工作之重點在於(1)首先研發出自走型機械手臂的雛型,供作未來大型網狀系統 的動態代理器(Dynamic Agent)之樣本模型,其中包括此一動態系統之數學模型(含機械 本體、驅動馬達、網路傳輸機制、控制邏輯,及回授控制器)與實際系統製作(含軟、硬 體設計、加工與撰寫),及配合子計畫二、三的網路傳輸和子計畫四的動態感測(如 CCD 影像)、自走式機械臂與中央基地台間之無線網路的即時資訊互傳和控制,此點的研究 訴求在於機電整合、機械臂控制(輪式機械人與機械臂)、含影像迴授之混合式控制、及 即時無線網路控制;(2)其次,研發出便於各子計畫在各自研究單位理論測試之軟體平 台,包括可任意 scale-up 上述代理器數量之大型網狀系統、中心-衛星式或完全分散式 之混合控制邏輯、及 configurable 之無線網路傳輸機制,其中的研究訴求在於如何製 作可由使用者指揮操作情境(scenario)的大型互動式模擬系統、如何引入 automata 以 提出適合各種不同使用者所欲之混合式控制邏輯、及如何安裝可任意設定之即時網路模 擬子系統;(3)最後,實際發展出上述軟體模擬之硬體系統,其中包括若干部自走式機 械臂,即時傳輸之 CCD 影像裝置、無線即時網路控制機制、和智慧型中央基地台(含彈 性使用者介面) ,而此點的研究訴求則在於克服(2)中因軟體模擬與實務系統的差距而 造成穩定性、目標執行性之困難與問題,和便於實際整合各子計劃的研究方法及成果,
以及具體展示整體計劃之成效。
基於上述,以下就工作重點描述如下:
1.採用之研究方法與原因
隨著電子技術的發展,嵌入式電腦(Embedded Personal Computer)技術漸趨成熟 穩定,體積小而功能完整、強大,已經廣泛運用於軍事、事務機器、CNC 工具機、與自 動化工廠中[1-3]。本計劃的行動輪式機械人也將採用嵌入式電腦作為其核心平台,因 其具有下列優點:
(1) 體積小且低耗電,本身即有電源管理的功能。
(2) 具有完整的個人電腦架構,可以直接提供無線網際網路的連結服務。
(3) 本身即有 USB 介面及內嵌式無線網路
(4) 作業系統為及時作業系統(PockPC 2003),撰寫之程式具有高度移植性 (5) 價格低廉,升級方便。
這樣的設計提供了遠端監控與遠端即時更新韌體的可能。
參考文獻
[1] Chung, L.; Subramanian, N, “Architecture-based semantic evolution: a study of remotely controlled embedded systems”, Proceedings. IEEE International Conference, pp. 663-666, 2001.
[2] Dave, B.P.; Jha, N.K., “COHRA:” hardware-software cosynthesis of hierarchical heterogeneous distributed embedded systems” Computer-Aided Design of Integrated Circuits and Systems, IEEE Transactions on , Vol. 17, Issue: 10, pp. 900-919, Oct 1998.
[3] Ludvig, J.; McCarthy, J.; Neuendorffer, S.; Sachs, S.R., “Reprogrammable platforms for high-speed data acquisition”Signals, Systems and Computers, 2001. Conference Record of the Thirty-Fifth Asilomar Conference on , Vol.
1 , pp. 486-493, 2001.
[4] Jane W.S. LIU , “Real-Time Systems” , Prentice Hall , 2000.
[5] Chenyang Lu , Brian M. Blum , Tarek F. Abdelzaher , John A. Stankovic , and Tian He , “RAP:A Real-Time Communication Architecture for Large-Scale Wireless Sensor Networks” , IEEE , 2002.
[6] Aad and C. Castelluccia , “Differentiation Mechanisms for IEEE 802.11 “, IEEE INFOCOM 2001 , Anchorage , Alaska , April 2001.
[7] S. Choi and K. G. Shin , “A Unified Wireless LAN Architecture for Real-Time
and Non-Real-Time Communication Services” , IEEE/ACM Transactions on Networking , 8(1) , February 2000.
[8] N. Papanikolopoulos and P. Khosla, “Adaptive Robotic Visual Tracking”, Proc. American Control Conf., pp. 962-967, June 1991.
[9] Bar-Shalom, Y., Chang, K. C., and Blom, H. A. P., “Tracking a maneuvering target using input estimation versus the interacting multiple model algorithm”, IEEE Trans. on Aerospace and Electronic Systems, 25, 2 , Mar.
1989.
[10] 劉 大 元 , 傅 立 成 , 許 書 豪 , 郭 騰 凱 , “Ana;ysis on an On-Line iterative Correction Control Law for Visual Tracking,” submitted to Asian Control Conference, 2002.
[11] Bar-Shalom, Y., E. Tse, “Tracking in a Cluttered Environment with Probabilistic Data Association,” Automatica, Vol. 11, pp. 451-460, 1975.
[12] Colegrove, S. B., and S. J. Davey, “The Probabilistic Data Association Filter with Multiple Nonuniform Clutter Regions,” IEEE Int. Radar Conf., pp. 65-70, 2000.
[13] Chen, J., H. Leung, T. Lo, J. Litva, M. Blanchette, “A Modified Probabilistic Data Association in a Real Clutter Environment,” IEEE Trans.
Aerospace and Electronic Systems, Vol. 32, No. 1, pp. 300-313, 1996.
[14] Technical Staff, Anthur Gelb , Appliend Optimal Estimation, The Analytic Sciences Corporation,1974.
[15] A. Azarbayejani and A. P. Pentland, “Recursive Estimation of Motion, Structure, and Focal Length,” IEEE Trans. Pattern Analysis and Machine Intelligence, Vol. 17, No. 6, pp. 562-575, June 1995.
[16] Alberto L.G. and Indra Widjaja, “Communication Networks”, McGraw-Hill, 2000.
[17] Asada, Minoru; Uchibe, Eiji; Hosoda, Koh, “Cooperative behavior acquisition for 行動輪式機械人 s in dynamically changing real worlds via vision-based reinforcement learning and development”, Artificial Intelligence, Vol. 110, Issue: 2, pp. 275-292, June, 1999.
[18] Brogan,D.; Hodgins, J.K., Ginot, Vincent; Le Page, “Group Behaviors for systems with significant dynamics”, Autonomous Robots, Vol. 4, pp. 137-153, 1997.
[19] Bullo, F.; Zefran, M., “Modeling and controllability for a class of hybrid mechanical systems”, Robotics and Automation, IEEE Transactions on, pp.
563-573.
[20] Bloch, J; “Effective Java Programming Language Guide”, Addison Wesley Professional; June , 2001
[21] Christophe; Souissi, Sami, “A multi-agents architecture to enhance end-user individual-based modeling”, Ecological Modelling, Vol. 157, Issue:
1, November 15, pp. 23 – 41, 2002.
[22] Chen, J.; Subramaniam, S;“A GUI environment to manipulate FSMs for testing GUI-based applications in java”, Proceedings of the 34th Annual Hawaii International Conference on , 2001.
[23] Kim, Y.H.; Lewis, F.L., “Neural network output feedback control of robot manipulators”, Robotics and Automation, IEEE Transactions on, pp. 301-309.
[24] Ladd, A.M.; Bekris, K.E.; Marceau, G.; Rudys, A.; Wallach, D.S.; Kavraki, L.E., “Using wireless ethernet for localization”, Intelligent Robots and System, 2002. IEEE/RSJ International Conference on, pp. 402- 408, 1999.
[25] Martin, M.C., “Genetic programming for real world robot vision”, Intelligent Robots and System, 2002. IEEE/RSJ International Conference on, pp. 67-72, 2002.
[26] Malin, J.T.; Kowing, J.; Schreckenghost, D.; Bonasso, P.; Nieten, J.; Graham, J.S.; Fleming, L.D.; MacMahon, M.; Thronesbery, C., “Multi-agent diagnosis and control of an air revitalization system for life support in space”, Aerospace Conference Proceedings, IEEE , Vol. 6, pp. 309 –326, 2000.
[27] Shehory, Onn; Kraus, Sarit, “Methods for task allocation via agent coalition formation”, Artificial Intelligence, Vol. 101, Issue: 1-2, pp.
165-200, May, 1998.
[28] Tae-Yong Kuc; In-Jae Lee; Seung-Min Baek, “Perception, reasoning and learning of multiple agent systems for robot soccer”, Systems, Man, and Cybernetics, 1999. IEEE SMC '99 Conference Proceedings. IEEE International Conference on , Vol. 6 , pp. 728 –733, 1999.
[29] Yang, S.X.; Guangfeng Yuan, ; Meng, M, “Real-time collision-free path planning and tracking control of a nonholonomic 行動輪式機械人 using a biologically inspired approach”, Computational Intelligence in Robotics and Automation, Proceedings 2001 IEEE International Symposium on, pp.
113-118, 2001.
(三)完成之工作項目及成果
下面就 93 年上半年度計畫的執行結果細分為系統控制及硬體架構、機構設計、
通訊系統及及時影像追蹤系統來深入討論。
1.系統控制及硬體架構
動態代理器的單位是以行動輪式機械人為其主體,整體的硬體設置如圖一所示
\
圖一、行動輪式機械人硬體架構圖
輪式行動機械人的控制主體分為低階及高階控制,低階控制的微處理器是 TI DSP 320F240,此微處理器主要的工作為控制馬達位置、轉速及力矩輸出,並以多餘的處理 時間將超音波及 Rate Rate Gyro 信號讀入微處理器並處理。
高階的控制器具有四個主要功能,第一個以處理單位行動代理器之特定行動決策為 Stepping
motors Controller
-PDA -Laptop
(mini)
Communication
FPGA based Camera US
Ultrasonics US
Drivers
12V/24V Battery
802.11
Manipulator 3/4 D.O.F
( )
US
Omi Wheels
GPS Signals
from Server
DSP
主亦即反應式導航,比如:須有及時時間反應的防碰撞系統、閃避障礙物系統以及緊急 停止判斷系統等…;第二個主要功能為與伺服器通訊的功能並同時具有 IEEE 802.11 與 Blue Tooth 之通訊規格;第三個功能處理及時影像系統較為繁複的遞迴演算法。
行動輪式機械人之內部通訊主要以 USB 為主,並透過 USB 與多軸機械手臂做控制訊 號的雙向交握及動態訊號的即時傳遞,我們將在後面章節詳細介紹。
感測器主要以超音波、Rate Rate Gyro 並配合 Encoder 做自我定位及環境搜尋辨識 的功能,透過感測器訊號融合可以進一步增加自我定位及巡航的精確度及可靠度。
低階的控制器測試階段以 PID 為主,待確定系統之可控性之後將應用適應或具有研 究價值的控制法則及行為策略,控制系統架構詳如圖二。本圖為雙驅動輪配合 DSP 為控 制核心之控制架構圖,整合每單位行動輪式機械人的感測資訊之後,以全域的路徑規劃 在細分每單位的工作方式及路徑,透過無線傳輸系統傳遞給每個代理器單位,一起合作 完成主控端所給予的分派工作。
圖二、輪式行動機械人系統控制架構圖
由圖二可知系統回授信號由 Dear Reckoning、超音波以及 Rate Rate Gyro 做訊號 融合之後輸出(x k y k( ), ( ), ( )φ k ),在此,x, y 為行動輪式機械人的位置,φ為行動輪式機
Backstepping control for path tracking
Photocouple Servo Motor
En coder DSP
PD control Photocouple Servo Motor Encoder
Vehicle
Gyro Dead reckoning
(S ensor fusion) Desired
position PDA
PD control
Ultrasonic Sensors Des ired
torq ue
Encoder
械人的朝向角,k為數位取樣時間。以下就本系統所使用感測器逐一說明:
a. 超音波定位系統:
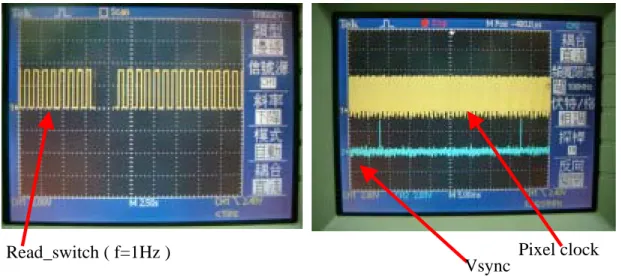
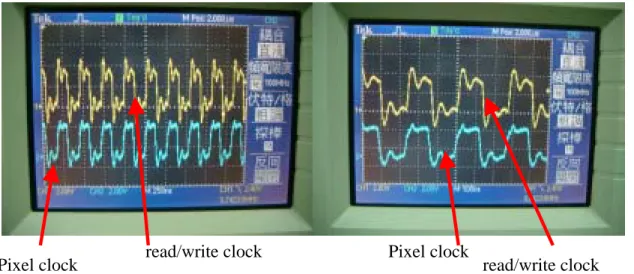
如圖三所示,當 Trigger 端電壓由高電為轉為低電之後,超音波便會由壓電晶體依 序發射一組由八個 40kHz 組成的超音波,待發射之後 Digital 便會有一段時間轉為低電 位以防止之前的反射及繞射音波干擾,如圖三所示。
圖三、超音波控制時序圖*
圖四、超音波發射壓電晶體及其零件組合圖*
*資料來源: Polorid 公司操作手冊
利用超音波感測器,除了防碰撞之外,再使用三角量測法可以得到自我定位的位 置,我們要在 robot 上裝 6 個 sensor,使用型號 SN18817 的 sensor,他的量測範圍為 20cm~10.5m,power surply 4.5V~6.8V。
超音波由發射電路控制射出一個音波開始的時間減掉由障礙物傳回來的時間除以 二來推算出發射器與物體相距的距離,這在許多行動輪式機械人上廣泛被用到,此方法 稱為 time-of-flight(TOF),而這個方法的優點為量測的結果為線性,其方法為 d=vt,
其中 d=round-trip distance,v=speed of propagation,t=elapsed time;圖五是對 單個超音波以單點發射接收方式的實驗紀錄(sensor 離地 8cm,障礙物大小,Blanking time :2.38ms)
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360 380 400 420 440 460 480 500 520 540
距離
圖五、超音波定性測試圖
障礙物在距離 sensor 40cm~360cm 時都呈現在線性的狀態下,之後稍微有點雜訊,不過 整體還是在線性的狀態下。
b. Dead Reckoning(DR) System:
本系統之 DR 由 Odometers 組成,主要可以藉由已建立車體之 Kinematic 模型來反 推行動輪式機械人之位置,假設 Encoder 一轉可以輸出P 個 pulse,而且取樣時間為 Te 則單輪之轉速v可以表示為
( / sec)
180 Pe
v rad
T
= ⋅ π
圖六、行動輪式機械人座標軸定義 在此我們定義變數名稱以及其簡單的定義說明
b: 輪心到中心線的距離 d: 行動輪式機械人位移距離 r : 輪半徑
c: 常數 = r/ 2b
m : 行動輪式機械人質心重量(不含輪子) c
m : 四輪質心重量 w
I : 行動輪式機械人質心慣量(不含輪子) c
X
Y
φ
X
Y
φ
I : 四輪質心慣量(垂直軸心) w
I : 四輪質心慣量(平行軸心) m
輪式行動機械人是三自由度的機構,為了求得行動輪式機械人的姿態,必須將控制 變數定義為 , ,x yφ,變數名稱之定義已由前小節提及,在此,定義行動輪式機械人之角 速度wave及控制方向變數µ
2
l r ave
w
w w +
=
l r
l r
w w
w w
+
= − µ
在此, 0≤ ≤ ,而且µ 1 wr = &及θr wl = &分別為左右兩輪之轉速,θl θr及θl為左右兩輪之角 度,因此,Kinematic 方程式可以被定義為下式
( )
cos ( ) sin
( )
ave
ave
ave
dx t
dt K w
dy t K w
dt
K b w d t
dt
φ φ φ µ
⋅ ⋅
= ⋅ ⋅
⋅ ⋅
整個方程式可以重新改寫為
( )
q&=KB q u
( ) ( ) ( ) dx t
dt q dy t
dt d t
dt φ
=
& , B q( )=
cos 0 sin 0
0 1
φ φ
,
/
ave
ave
u rw
w b µ
=
根據上述之推論,我們可以求得左右輪的運動速度 ) 1 ( +µ
= ave
r w
w
) 1 ( −µ
= ave
l w
w
c. DSP Based 感測器及馬達控制應用
TI DSP 320F240 是一個適用於本系統的微處理器,尤其以馬達控制部分節省了許多 電路設計、Layout 及測試方面的時間,詳細的規格、功能及系統架構圖請詳見附錄。
整體控制電路設計則是以控制週期為分類,由於只有兩組一般 timer,所以使用其
中一組產生 Event A 管理模組給予超音波感測系統以及 Rate Rate Gyro 量測,另一組 Event B 則用以產生控制伺服馬達的週期訊號,並使用 Capture 1~2 來取得超音波的回 授觸發信號,依此類推,則一組 DSP 若設計得當,則可以控制至少二個伺服馬達及六組 超音波加上一組 Rate Rate Gyro,又因為本系統需要五個伺服馬達控制,所以必須使用 兩個以上 DSP 微處理器。
DSP 之間的內部信號傳遞則以 PIO 為主,外部以串列通訊 SCI 加上 USB 選擇其一為 其最佳方式,以下就更詳細的軟硬體設計部份詳加探討。
Part I. DSP Based 感測器設計
輪式行動機械人的感測器設計之中必須兼顧到能夠所有的感測器特性,現下的重 點工作是對於超音波感測系統及 Rate Rate Gyro 的電路設計及 DSP 程式撰寫,
a. 超音波感測系統設計
超音波感測系統詳見於前述,其訊號種類定義如下表
Pin Label IO Commands
1 GND
2 BLNK I When driven high, any reflected signal is blanked out
3 N/C
4 INIT I When driven high, the pulse is driven out of module
5 N/C
6 OSC O This has 49.4 KHz oscillator output 7 ECHO O Open collector is output from module. We
have to pull-up with a 4.7K resistor 8 BINH I When asserted, the masking will not be
active
9 VCC This takes up +5 volts and a 1,000 uF capacitor is connected to it.
表一、超音波信號定義
DSP 軟體設計流程如下
圖七、超音波軟體設計流程圖
超音波電路設計時必須考量瞬間一百多 Volt 的脈衝訊號,因此,給予電路適 當的能量十分重要的事,也因此可以提供整個系統相當的穩定度。
Start
Reset a timer Select a Ultrasonic (1~6)
INIT
Read the timer
Wait for ECHO Yes No
b. Rate Rate Gyro
如圖所示,使用於本系統的 Rate Rate Gyro 主要是以光學式的為主,在訊號 的傳送接收上必須要用到 DSP A/D 轉換於 10 ms 的取樣時間內讀取瞬間的姿態變化 量,而後 Rate Rate Gyro 使用上必須每隔一段較長的時間給予校正步驟,否則會 產生累積性誤差造成系統誤差無法收斂至規格範圍內。
圖八、fiber-optic Rate Gyro 功能方塊圖([Lefevre,1992])
Part II. DSP Based 馬達控制器設計
馬達控制器設計初期是以驅動現有的馬達驅動模組為主,在電路設計上必須以 D/A 輸出經過低通濾波器,由於馬達輸入端最高輸入訊號頻率已經被限制在 150 KHz,
本項馬達控制以 A/F 轉換 IC 作為低階控制信號輸出後轉為實際馬達驅動模組的控制信 號之主要訊號轉換橋樑。
行動輪式機械人採用無刷伺服馬達,其動態模型可以寫為下式
q
q q d
d d v Ri n
dt dt θ λ λ
= + +
d
d d q
d v Ri n d
dt dt θ λ λ
= + +
在此, R 是 phase resistance,v是 voltage,i 是 current,θ 是 angular displacement,n是 number of pole pairs,λ 是 flux linkage 及t 表示時間。
力矩方程式則可以表示成
( )
, 3( )
m q d 2 d q q d
i i n i i
τ = λ −λ
最後縱整所有的馬達控制因子。包含 flux linkage 及 fictitious inductance quantities1
經過適當的計算並結合馬達動態模型可得下式
( ) ( ) ( ),
L&= f Lτ +g L u t 在此,
( )
( )
2 2 3
1 2 1 3
3 1 2
3 3
2 2
,
d q
e
l
e d
l
q q q
q
d d
n L L
nK L L L
J J
nK R nL
f L L L L L
L L L
R nL
L L L
L L
τ τ
−
+ −
= − − −
− −
, ( )
0 1 0 0 0 1
q
d
g x L
L
=
( ) [ 1 2 3]
T
T
q d
L t L L L w i i
=
=
, ( ) q
d
u t v v
=
參考文獻
[1] Chih-Fu Chang and Li-Chen Fu, “Nonlinear Control of a Wheeled 行動輪式 機 械 人 with Nonholonomic Constraints”, Accepted by IEEE International Conference System Man and Cybernetics, 2004
[2] Meng Ji,Zhen Zhang,Gautam Biswas and Nilanjan Sarkar,”Hybrid Fault Adaptive Control of a Wheeled 行動輪式機械人”,IEEE/ASME Tranactions on Mechatronics, Vol. 8,No. 2, June 2003
[3] Takanori Fukao, Hiroshi Nakagawa and Norihiki Adchi,”Adaptive Tracking Control of a Nonholonomic 行動輪式機械人”,IEEE Tranactions on Robotics and Automation, Vol. 16, No.5, October 2000
[4] Zvi Shiller, and Yu-Rwei Gwo,”Dynamic Motion Planning of Autonomous Vehicles”, IEEE Tranactions on Robotic and Automation, Vol.7, No. 2, April 1991
[5] Jozsef Kovecses,Jean-Claude Piedboeuf and Christian Lanege,”Dynamics Modeling and Simulation of Constrained Robotic Systems”,IEEE/ASME Tranactions on Mechatronics, Vol.8, No.2, June 2003
[6] Yoshio Yamamoto and Xiaoping Yun,”Effect of the Dynamic Interaction on Coordinated Control of Mobile Manipulators”,IEEE Tranaction on Robotics and
Automation. Vol. 12. No. 5. Oct. 1996
[7] Min-Soeng Kim, Jin-Ho Shin, Sun-Gi Hong and Ju-Jang Lee,”Design a robust adaptive dynamic controller for nonholonomic and disturbances”, Mechatronics, Vol. 13, pp. 507-519, 2003
[8] H.G. Tanner, K.J. Kyriakopoulos, N.I. Krikelis,”Advanced agritural robots:
kinematics and dynamics of multiple mobile manipulators handling non-rigid material”, Computers and Electronics in Agriculture, Vol. 31, pp.91-105, 2001
[9] Zhong-Ping Jiang and Henk Nijmeijer,”Tracking Control of 行動輪式機械人 s: A Case Study in Backstepping”,Automatica, Vol. 33, No. 7, pp. 1393-1399, 1997
[10] Zvi Shiller and Yu-Rwei Gwo,”Dynamic Motion Planning of Autonomous Vehicles”,IEEE Tranactions on Robotics and Automation, Vol. 7,No. 2, April 1991
[11] Hemant Melkote and Farshad Khorrami,”Nonlinear Adaptive Control of Direct-Drive Bruless DC Motors and Applications to Robotic Manipulators”, IEEE/ASME Tranactions on Mechatronics,Vol 4.No. 1,March 1999
[12] Neyram Hemati,James S.Thorp and Ming C.Leu,”Robust Nonlinear Control of Brushless dc Motor for Direct-Drive Robotic Applications”, IEEE Tranactions on Industrial Electronics,Vol. 37, No. 6, Dec. 1990
[13] K.-H.Kim, I.-C.Baik,S.-K.Chung,M.-J.Youn,”Robust Speed Control of Brushless DC Motor Using Adaptive Inout-Output Linearisation Technique”,IEE Proc. –Electr. Power Appl.,Vol. 144,No. 6,Nov. 1997
[14] Neyram Hemati and Ming C.Leu,”A Complete Model Characterization of Brushless dc Motors”, IEEE Tranaction on Industry Applications, Vol. 28, No. 1,Jan/Feb 1992
[15] TI DSP User’s manual, http://www.ti.com
2.機構設計
機構部分以實用性、創新性以及可靠性為設計依據,依據此三項大原則來考量車體 的設計,再評估機械手臂、電池、各子系統控制板及所有感測器之尺寸以及重量,經過 多次反覆考量討論,以下就各部分機構分別討論:
a. 底盤
在車體設計的方面,由於底盤是車體最重要的一部份,故我們從底盤著手,以機構 設計之觀點來改良普通之行進方式,以及設計出新附増之功能。
圖九、輪式行動機械人機構設計
圖十、輪式行動機械人機構設計
以滾動方式克服障礙高起地面
黃色垂直軸為軸心,前輪部份 可旋轉,
車體之架構設計如下,後輪軸採用差動式設計,前輪亦為設計之重點,再此將輪框 分成四個支架,支架頂端由小惰輪組成,支架中央則以四輔馬達帶動旋轉。整體共有五 顆馬達,後二前三,而前面需要兩顆之原因是當前方遇到高起之障礙物時,這時會啟動 前方輪軸之馬達讓前面輪軸旋轉,藉由後面馬達推力將本身推上去。而橘色部份則為垂 直軸之馬達,控制方向之左右,配合後兩輪差動之多少適度的改變轉動方向,若橘色馬 達改成無動力軸則整個機構為 Nonholonomic system;反之為 Honolomic system。
圖十一、輪式行動機械人機構設計
所以此設計有三項優點:一、 有效縮小轉半徑,讓轉彎更為順暢。二、 可以克服 一定程度之不平地面,因此也可以在室外活動。三、可以藉由前輪之高低配合三軸 Rate Rate Gyro 調整車子水平姿態,使 Manipulator 盡量得以在某個程度內工作在水平平台 上。
前輪部份 後輪部份
惰輪
底盤的側試圖如下:
圖十二、輪式行動機械人機構設計
前輪跟後輪的底盤為分開並沒有互動,因前輪的底盤是要用來轉向,換句話說,前輪的 底盤會隨著轉彎的需要而做適度的迴轉調整。
這樣設計有以下幾項優點:一、底盤與車身分開,拆卸方便,利於日後的更改與維 修。二、底盤與車身之間可以裝置適當的阻泥器,以防止車身遭受過大的震動。
此外,關於各個馬達的配置方式,我們採用模組化設計的概念:
圖十三、輪式行動機械人機構設計
如圖所示,這是一個「馬達 聯軸器 齒輪組 輪胎」的模組,同樣的一個模組可用於 兩個後輪與兩組前輪上。至於用來使前輪軸轉向的馬達,只要將上述的模組中之輪子改 成前輪軸即可達成目標,亦即利用「馬達 聯軸器 齒輪組 前輪軸」這個模組就可以
馬達
連軸器 齒輪組
輪胎
順利達成我們所需要前輪轉向的目標。
馬達的配置利用模組化設計有以下幾項優點:一、重複率高(在這次的計畫中重複 了 5 次)就可以不需要重新設計。二、使用更堅固的機構設計此模組,如此一來,底盤 的設計就會變的非常簡潔、一目了然。三、用齒輪組的方式可以將整個齒輪盒子鎖在底 板上,增加傳動機構的穩定性。四、若日後想再稍作變更或是維修,只需將模組拆卸下 來即可。
b、車體外型
目前規劃的車體外型如下圖所示:
圖十四、輪式行動機械人機構設計 超音波感測器 s 共六個平均放置在前端的圓弧面上。
紅色部分的外殼預計採用的材料,目前有兩種選擇方案:一、壓克力材質。二、薄 金屬片材質。最後採用何種方案來做為外殼的部分,則視日後實作的情形而定。
此面上安置 Ultrasonic Sensors*5
c.內部配置規劃
各電路模組、控制器、電池之配置如下:
圖十五、輪式行動機械人機構設計
圖十六、輪式行動機械人機構設計
其中左上角為電池,左下角為 5 個馬達的控制器,右邊四個方塊為各種類型的晶片,種 類如下:
影像卡: 17*10*10(cm) WLAN : 23*18*5 (cm) DSP : 17*16*4 (cm) PDA : 10*10*10(cm)
電池
馬達控 制器*5
各類晶片
手臂安置處
機械手臂安置在上圖中的圓盤上,如下圖所示:
圖十七、輪式行動機械人機構設計
機械手臂:20*20*50(cm)
此即為我們預計車體的完成模型(未加外殼前)。
機械手臂採購現有的產品,手臂實際的照片如下(lynxmotion corp.):
圖十八、Manipulator 機構
圖十九、Manipulator 機構 規格:
• Precision Laser cut structural components
• Custom aluminum and injection molded components
• Easily connects to the PC's serial port
• Advanced Windows software allows positioning the gripper in an X, Y, Z grid
• Teach the arm with a keyboard or joystick
3.通訊系統:
通信系統主要分為無線傳輸系統及USB兩個部分來說明 a.無線傳輸系統
本小節我們共分為三小節來說明,分別為系統架構、及時控制系統時間延遲模型及
及時控制系統軟硬體設計。
<1>系統架構
<a>多群組代理人
多群組代理人系統主要是用於完成比較複雜性的工作,尤其是單台行動輪式機械人 沒辦法單獨完成的部分,整個代理人單元之間可以互相分享所獲得的資訊進而拼湊出整 個任務的輪廓,例如:需要合作搬運的物件太大,影像系統可以以每單位代理人的影像 資運及個別位置資訊整合出待搬運物體的形狀,進而決定搬運的路徑及策略。
穩定的通訊時間是大多數無線網路期望的結果,在此計畫中,通訊時間的不確定性 加深了整體控制的困難度,換句話說,進行無線網路通訊配合行動輪式機械人的控制必 須要考量到 MAC(Media Access Level)的訊息切換策略,在此,掌握無線網路實體與驅 動程式是本次通訊控制的關鍵之一。
在此研究中,我們將整合 IEEE 802.11 與 Bluetooth 兩大通訊系統實現遠端監控、
策略整合、路徑規劃與群體行為控制,802.11 必須配合 Access Point(AP),Bluetooth 則以 Ad hoc 架構為主。
如圖廿,多群組代理器之訊息分享機制與管理表示了伺服器為全域決策及人機控制 介面的管理中心,管理中心與地區代理人間有訊息傳遞的管道與機制,地區代理人之間 也會因為任務的不同而可以任意拆散或編組,同時也有自己的通訊機制與相對應的行 為。
D
Dyynnaammiicc && LLooccaall I
Innffoorrmmaattiioonn
M
Ma a na n ag gi in n g g
BeBehhaavviioorr bbaasseedd rroobboottss StStaattiicc && GGlloobbaall
InInffoorrmmaattiioonn
圖廿、多群組代理器之訊息分享機制與管理
<b>及時控制系統時間延遲模型
Integrated Communication and Control System (ICCS)控制策略是為了發展及時 控制應運而生,Yoram Halevi and Asok Ray[2]在 1988 年時提出了一套將延遲系統模 型化的法則,系統的狀態方程式可寫為
x Ax Bu y Cx
= +
=
&
在此,x∈Rn,u∈Rn, y∈Rr, A 、 B 及C為矩陣 數位化之後再求其解則可求得x
1 1
0 l
k
k s k i k
i
x+ A x B u −
=
= +∑
在此,xk =x kT( ),As =exp( )AT 以及uk i− =u t t( ), ∈ t tik, ik−1
( )
1exp
k i k i
k t
i t
B =∫ − A T−τ Bdτ
假設訊號傳遞有延遲現象,則p k( )=1, 2,...,n,改寫狀態方程式如下
( ) ( )
1 0 0 0 1 1
1
0 1
1
n
k k k k
k s k k
i l
k k
k j k
j
x A B J C x B J y
B H B u
γ γ
η
+ −
=
−
=
= − −
+ +
∑
∑
在 此 , ( )
( )
1 0
k i
if i p k if i p k γ = =
≠ , y k( )=Cxk , 1 0 1
1 n
k k
k k i k k
i
G Cx y F
η − γ γ − η
=
= − −∑ + ,
0 1
1 n
k k
k k i k k
i
u Jγ Cx J γ y − Hη
=
= − − ∑ +
所以,合併上式可重新將矩陣寫為
1
k k k
X + =φ X 在此,Xk = xTk yTk−1 K yk pT− ηkT uTk−1
不過這一套法則實行上有些困難,首先這套法則只適用於延遲時間比控制時間大的系 統,其次,若延遲時間太長,則會造成矩陣大小變得非常龐大,因此,我們預定提出一
套更有效率的延遲時間模型化的法則。
<c>及時控制系統軟硬體設計 Part I.硬體設計
本系統以 Intel XSCALE 技術為主,使用 Intel IXP 425 網路專用微處理器,具有高 度整合性以及高效能的特性。這顆微處理器可以支援多 WAN 及 LAN 技術尤其在下列各 應用領域更是可展現其優越性: Gateways,Voice over IP(VoIP), wireless access points(WAP), SME routers, switched, security devices, Mini-DSLAMs(Digital Subscriber line Access Multiplexers), xDSL line cards, industrial control 及 network imaging applications.
圖廿一所示為發展系統架構圖,我們可以發現其應用領域已經包含了我們所需要的 高階控制及演算法大部分功能,現正詳加規劃以便在後續的計畫中能夠一舉取代 PDA 並憑之整合四大系統於一身。
圖廿一、Intel IXP 4XXX 微處理器架構圖(Intel corp.)
硬體設計的概念上,除了無線網路的基本功能之外,必須要有相當的擴充性,由上圖 所示 PCI 控制器一舉解決了此類的問題,不過由於現下發展板中只有兩個 Mini-PCI 的擴充槽並不能滿足我們最後整合四大系統的需求,加上發展板上有一些現下並沒有 用到的功能,如 VOIP 等,所以我們必須要重新 Layout 屬於我們的電路板並增加擴充 插槽及 LCD 顯示的功能方能夠除錯並進而快速的發展我們的系統。
Part <II> 軟體設計
圖廿二及圖廿三秀出系統於 Pocket PC 2003 作業系統中的執行畫面
圖廿二、PDA 執行 PocketPC 2003 畫面(Microsoft corp.)
圖廿三、通訊程式測試畫面
軟體的部分以完成 Task 的通訊順暢以及控制系統的即時性要求為前提之下,賦 予六項主要的功能
檔案管理: 提供存取參數於 Flash 的功能。
系統參數校正:包含超音波、Rate Rate Gyro、Encoder、及時影像處理及伺服 馬達等。
網路功能設定及測試:設定基本網路參數及測試連線網路狀態。
控制參數調整及管理:調整控制器參數並下載至 DSP 上執行。
驅動程式掛載及卸載:驅動程式管理。
求助及說明:撰寫較詳盡的使用者說明檔,讓使用者一目了然。