氣象塔儀器設置準則
REVISION HISTORY
( This version supersedes all previous ones. ) Revision No. Editor Date (yyyy-mm)
001 W.C.Cheng 2015-07
氣象塔儀器設置準則
目錄
第 1 章 一般性 ... 1
1.1 通則 ... 1
1.2 引用標準 ... 1
1.3 用語及定義 ... 1
第 2 章 試驗場址 ... 3
2.1 氣象塔設置位址 ... 3
2.2 量測區域 ... 4
2.3 因測試場址地形變化造成之氣流畸變 ... 7
第 3 章 氣象塔儀器設置 ... 9
3.1 氣象塔型式與風速計設置 ... 9
3.2 其他測量儀器佈置 ... 10
3.3 懸臂長度計算 ... 11
3.4 風速計規格 ... 15
3.5 現場比對 ... 23
3.6 風能遙測感應器(wind energy remote sensing) ... 24
1.1 通則
第 1 章 一般性
1.1
通則
本準則針對水平式風力機功率性能量測時,氣象觀測塔(後簡稱氣象塔)安裝場址評估、量測儀器設置要求、量 測儀器認證與評估,做一統一性要求說明。
1.2
引用標準
下列標準因本準則所引用,成為本準則之一部分。如有加註年份之版次,不適用於其後之修訂版(包括補充增 修)。無加註年份者,適用該最新版(包括補充增修)。
- IEC 61400-12-1: Edition 1.0, 2005-12, Wind turbines – Part 12-1: Power performance measurements of electricity producing wind
- ISO 2533:1975: Standard atmosphere
- CNS 15176-12-1 風力機-第 12-1 部:發電用風力機之功率性能量測
1.3
用語及定義
1.3.1 年發電量(annual energy production, AEP)
將所測量之功率曲線應用至輪轂高度之各種參考風速頻率分布,並假定 100%可取得頻率分布時,計算 1 年期 間內,1 部風力機之總發電量。
1.3.2 複雜的地型(complex terrain)
試驗場周圍之地形,具有導致氣流畸變之明顯地形變化或地形障礙物。
1.3.3 數據組(data set)
在連續期間內蒐集所取樣之數據。
1.3.4 氣流畸變(flow distortion)
由障礙物、地形變化或其他風力機引起之氣流改變,其結果為相對自由流產生偏離,造成一定程度之風速量測 誤差。
1.3 用語及定義
1.3.7 量測期間(measurement period)
在該期間內可蒐集到針對功率性能試驗之明確統計資料庫。
1.3.8 量測扇形區域(measurement sector)
風向所形成之扇形區域,由該區域能蒐集用於實測功率曲線之數據。
1.3.9 區間法(method of bins)
針對特定參數將試驗數據分組為風速區間(區間)之數據歸納的過程。
備考:要針對每 1 個數據組,記錄數據組或樣本的數目以及其總和,還要算出每個數據組內的平均參數值。
1.3.10 障礙物(obstacles)
阻擋風力並產生氣流畸變之物體,如建築物及樹木。
1.3.11 功率性能(Power performance) 量測風力機產生電功率及能量之能力。
1.3.12 標準不確定度(standard uncertainty) 以標準差所表示之量測結果不確定度。
1.3.13 掃掠面積(swept area)
水平軸風力機,該面積為轉子轉動而投影在垂直於轉動軸心之平面。
1.3.14 試驗場(test field)
風力機於試驗時之位置及其周圍區域。
1.3.15 測量不確定度(uncertainty in measurement)
與量測結果相關之參數,用來表示合理賦予測量值之離散程度。
2.1 氣象塔設置位址
第 2 章 試驗場址
為判定驅動風力機之風速值,臨近受測風力機之試驗場址應設立一支氣象塔,其設置位置之決定,應評估試驗 場址內之障礙物(例如:臨近風力機、房屋、樹叢等)與地形之變化,以便定義扇形量測區域、估算氣流修正係 數與評估由於氣流畸變而產生之不確定度。
2.1
氣象塔設置位址
2.1.1 設置距離
應注意氣象塔設置位置,不應過於接近障礙物,也不應離受測風力機太遠。氣象塔位置應在受測風力機轉子直 徑的 2 至 4 倍距離之間,建議距離受測風力機轉子直徑的 2.5 倍。
2.1.2 設置方位
一般而言,氣象塔最佳位置為受測風力機之上風處,如下圖 2-1 所示,而該位置為受測風力機試驗期間能獲得 大部分有效風力之方位。然而在其他狀況下,例如針對位於山脊處之受測風力機,將氣象塔與受測風力機並排 較為恰當。
圖2-1
氣象塔最佳位置與遮蔽扇形區域
2.2 量測區域
2.2
量測區域
2.2.1 通則
由受測風力機及氣象塔方向望去,量測之有效扇形區域應排除明顯障礙物與臨近風力機所影響之遮蔽扇形區 域。
2.2.2 明顯障礙物
明顯障礙物之定義,應利用障礙物模型來預估障礙物對氣象塔與受測風力機於輪毂高度之影響。若障礙物在扇 形量測區域內,對氣象塔或受測風力機在輪毂高度之氣流影響大於 1%,則視為明顯障礙物其影響可由下式估 算:
𝛥𝑈𝐻 𝑈ℎ
= −9.75(1 − 𝑃0)ℎ
𝑥𝜂 exp(−0.67η1.5) 𝜂 =𝐻
ℎ (𝐾𝑥 ℎ)
− 1 𝑛+2
𝐾 = 2𝜅2 lnℎ 𝑧0
式中,
𝑥
=
障礙物至氣象塔或受測風力機之順流距離[m]ℎ
=
障礙物高度[m]𝛥𝑈𝐻
=
障礙物高度與輪毂高度之風速差 𝑈ℎ=
障礙物高度 h 處之自由風速[m/s]𝜂
=
速度廓線指數(n=0.14)𝑃0
=
障礙物孔洞(實體為 0;無障礙物則為 1) 𝐻=
輪毂高度[m]𝑧0
=
粗糙長度[m](為對數分布之垂直風剖面中平均風速為零之高度,與地面粗糙程度相關) 𝜅=
馮卡門(von Karman)常數 0.4若該障礙物為明顯障礙物時,應利用下述計算公式,決定明顯障礙物之等效直徑值,以用於後 續之遮蔽扇形區域之判斷:
De= 2𝑙ℎ𝑙𝑤
(𝑙ℎ+ 𝑙𝑤)
De = 明顯障礙物之等效直徑,代表遮蔽之面積大小。 [m]
𝑙ℎ = 明顯障礙物之高度。 [m]
𝑙𝑤 = 明顯障礙物之寬度。 [m]
2.2 量測區域
2.2.3 遮蔽扇形區域
遮蔽扇形區域與明顯障礙物之距離(L)以及明顯障礙物之面積(以等效直徑 D 代表)有關,如圖 2-2 所示,圖 2-2 的橫軸為明顯障礙物和受測風力機或氣象塔的距離(L)與明顯障礙物的等效直徑(D)之比值,當 L/D 為極小值 2 時 (圖 2-2 之 A 點),表示當風力機或氣象塔與明顯障礙物距離為明顯障礙物等效直徑的兩倍時,遮蔽扇形之 角度將大於 80 度;當 L/D 為極大值 20 時 (圖 2-2 之 B 點),遮蔽扇形的角度在 30 度以下。
圖2-2
遮蔽扇形角與相對距離(L
e/D
e或L
n/D
n)之關係[1]α = 1.3 tan−1(2.5𝐷𝑒
𝐿𝑒 + 0.15) + 10 or 𝛼 = 1.3 tan−1(2.5𝐷𝑛
𝐿𝑛 + 0.15) + 10
式中:
α = 遮蔽扇形角,α與Le/De或Ln/Dn之關係圖,如圖 2-2 所示。
𝐷𝑛 = 風力機之轉子直徑。 [m]
𝐿𝑛 = 臨近風力機與氣象塔或受測風力機之距離。 [m]
𝐿𝑒 = 明顯障礙物與氣象塔或受測風力機之距離。 [m]
2.2.4 有效量測扇形區域
受測風力機執行功率性能量測時,應剔除氣象塔或受測風力機受氣流擾動之遮蔽扇形區域內資料,且應清楚記 錄所有排除之遮蔽扇形區域之原因。以氣象塔而言,其入流風速會受到受測風力機、臨近風力機與明顯障礙物 的干擾,又以受測風力機而言,其入流風速會受到臨近風力機與明顯障礙物的干擾,故遮蔽扇形區域可分為五 種情況,如表 2-1 所示。而扣除氣象塔與受測風力機的遮蔽扇形區域後,即為有效扇形測量區域。
2.2 量測區域
表 2-1
遮蔽扇形區之分類[1]
編號 描述 示意圖
I 氣象塔之遮蔽扇形區域:
氣象塔入流風速受受測風力機之影響區域
II 氣象塔之遮蔽扇形區域:
氣象塔入流風速受臨近風力機之影響區域
III 氣象塔之遮蔽扇形區域:
氣象塔入流風速受明顯障礙物之影響區域
IV
受測風力機之遮蔽扇形區域:
受測風力機入流風速受臨近風力機之影響 區域
V
受測風力機之遮蔽扇形區域:
受測風力機入流風速受明顯障礙物之影響 區域
2.3 因測試場址地形變化造成之氣流畸變
2.3
因測試場址地形變化造成之氣流畸變
2.3.1 測試場址地形評估
宜取得受測風力機周圍之地形圖,並計算出受測風力機周圍之最適平面(best fit plane),再以最適平面為基準計 算出最大地形變化(maximum terrain variation from plane),最適平面與最大地形變化之示意圖如圖 2-3 所示。測 試場址之最適平面容許斜率與最大地形變化的評估準則如表 2-2 所示,若測試場址之地形變化符合評估準則,
則不需進行後續之場址校正程序,若測試場址之地形變化不符合評估準則,則需進行後續之場址校正程序。然 若測試場址最適平面之容許斜率大於表 2-2 之容許斜率,但不超出容許斜率的 1.5 倍時,可透過建立氣流模型 (flow model),分析氣象塔測量之風速與受測風力機位置之風速差異,若氣流模型於 10m/s 風速時之計算結果 差異在 1%以內,則無需進行後續場址校正程序,若計算結果超出 1%,則需執行後續場址校正程序。
圖2-3
最適平面與最大地形變化示意圖
表 2-2
測試場址之地形變化評估準則
距離 扇形區域 容許斜率% 最大地形變化
< 2L 360° < 3* < 0.04(H+D)
≧2L and < 4L 有效扇形測量區內 < 5* < 0.08(H+D) 有效扇形測量區外 < 10** 不適用
≧4L and < 8L 有效扇形測量區內 < 10* < 0.13(H+D)
* :扇形區域的最大斜率(the maximum slope of the plane)
** :扇形區域內之最陡斜率(連線通過塔柱基礎) L :為氣象塔與風力機之距離。[m]
H :輪轂高度(hub height)。[m]
D :轉子直徑。[m]
2.3 因測試場址地形變化造成之氣流畸變
2.3.2 場址校正程序
若測試場址不符合地形變化評估準則,則需利用進行測試場址校正,以實測氣流修正係數。
(a) 場址校正建置
除風力機功率性能量測時所需設立之氣象塔外,場址校正時應先在受測風力機的位置上設置一座校 正氣象塔,測量風速資料,利用兩座氣象塔的測量結果,建立所有風向之氣流修正係數表,以完成 場址校正。建置試驗系統時,需要兩具風速計、一具風向計及一套資料處理/記憶系統。受測風力機 位置之風速計應安裝於校正氣象塔上,裝設高度為受測風力機輪毂高度 2.5%內,且校正氣象塔應在 受測風力機塔架中心線至多 0.2H 處,其中 H 為風力機輪毂高度。
使用之風速計等級應優於 2.5B 或 1.7S,且兩風速計應採用有相同操作特性之同款風速計,並在同一 次風速計校正工作中完成校正。
(b) 數據量測及分析
場址校正之數據量測應以風力機功率性能量測之相同取樣速率,連續蒐集數據。量測資料數據組以 10 分鐘為一週期,應儲存每 10 分鐘週期內之平均值、標準差、最大值及最小值。數據組應依風向區 間進行分類,各區間不應大於 10°,也不應小於風向感測器之不確定度。
資料庫應剔除以下情況之數據組:
(i) 試驗設備故障或性能下降(例如:結冰因素) (ii) 扇形量測區域以外之風向
(iii) 平均風速小於 4 m/s 或大於 16 m/s 之情形
(iv) 功率性能量測期間,用來做為剔除標準之其他特定大氣條件
剔除不適用數據組後,試驗場址之校正數據資料庫應至少包含 24 小時有效風向之數據組,各數據組 中應至少包括 6 小時風速在 8 m/s 以上之數據,與 6 小時風速在 8 m/s 以下之數據。
應由試驗場址校正資料中,算出各扇形區域因地形造成之氣流修正係數之平均值αj,又αj為受測風力 機位置風速除以氣象塔風速之比值。
(c) 定義最終扇形量測區域
當鄰近扇形區域之氣流修正係數變化超過 0.02 時,則建議剔除量測扇形內之風向。當無法辨別明顯 障礙物或鄰近風力機對受測氣流修正係數之影響時,可增加扇形量測區域,但須考量明顯障礙物或 鄰近風力機對受測風力機轉子所造成之尾流效應。
(d) 試驗場址試驗報告與結果確認 試驗場址之試驗報告應包含:
(i) 所有扇形量測區域之照片,宜由受測風力機之輪毂高度拍攝為佳。
(ii) 試驗場址周邊區域之地圖,該區域所涵蓋之半徑距離至少為受測風力機轉子直徑之 20 倍,且 要顯示其地形、受測風力機之位置、氣象塔之位置、明顯障礙物之位置、鄰近風力機之位置以 及扇形量測區域。
(iii) 試驗場址之評估結果,即有效扇形量測區域之限制。
(iv) 若試驗場址需執行校正,則試驗報告應包含最終扇形量測區域之限制,以及因試驗場址評估 結果而有任何改變之原因。
3.1 氣象塔型式與風速計設置
第 3 章 氣象塔儀器設置
風力機功率性能量測需量測風速、風向、溫度、濕度與氣壓等資料,以評估受測風力機對應之輸出功率與發電 量,又為能正確地反應受測風力機之風速、風向等資料,各量測儀器應在氣象塔上做適當之排列與裝設,尤其 風速計的裝設位置應使得來自氣象塔與其懸臂之氣流畸變達到最低。
3.1
氣象塔型式與風速計設置
氣象塔得依主風速計及對比用風速計設置位置的不同,根據以下兩種氣象塔型式,進行量測儀器佈置。
3.1.1 階層式風速計設置
主風速計安裝於塔頂,而對比用風速計安裝於下方懸臂上,如下圖 3-1 所示。主風速計裝設高度應位於該氣象 塔所在地面以上,受測風力機輪毂高度±2.5%以內之距離,並安裝在能承接電纜進入風速計之圓形垂直管件上,
其管件應能支撐氣象塔以上至少 0.75 m 之主風速計測風杯以及支撐其他氣流擾動,且與垂直角度偏差應小於 2°。
對比用風速計應安裝在接近主風速計的位址,供確認彼此關聯性,以確保主風速計在風力機功率性能量測期間 內不會改變其校正結果,但對比用風速計不可干擾主風速計,建議將對比用風速計安裝在主風速計以下至少 1.5m,但不得超過 2.5 m 之下方懸臂上,且不可設置於上風處之塔架拉線(upstream guys)附近,避免被拉線之 尾流影響。
圖3-1
階層式風速計設置[2]
3.2 其他測量儀器佈置
3.1.2 平行式風速計設置
主測風計與對比用風速計皆安裝於塔頂部之懸臂上,如下圖 3-2 所示。兩風速計之裝設高度應位於該氣象塔所 在地面以上,受測風力機輪毂高度±2.5%以內之距離,並安裝於能承接電纜進入風速計之圓形垂直管件上,其 管件應能支撐氣象塔以上至少 0.75 m 之風速計測風杯以及支撐其他氣流擾動,且與垂直角度偏差應小於 2o兩 風速計應相距至少 1.5 m,但最大不可超過 2.5 m,並在試驗前須定義出主風速計,且應限制量測之扇形區域使 對比用風速計不會影響到主風速計。兩風速計至下方懸臂距離至少為懸臂直徑的 15 倍(建議值為 25 倍),使得 懸臂造成之氣流畸變(flow distortion)低於 0.5%。
圖3-2
平行式風速計設置[2]
3.2
其他測量儀器佈置
為執行風力機功率性能量測,所裝設之其他測量儀器之安裝位置與要求如下所示:
3.2.1 風標
風標應安裝在該氣象塔所在地面以上,受測風力機輪轂高度 10%以內之距離,且在主風速計下方 1.5 m 之範圍 內,安裝時應使扇形量測區域內的氣流畸變達到最小。
3.2.2 溫度與濕度感測器
溫度與濕度感測器宜安裝在主風速計下方 1.5 m,並在該氣象塔所在地面以上,受測風力機輪轂高度 10 m 以內 之輻射防護裝置(radiation shield)內。
3.2.3 壓力感測器
壓力感測器宜安裝在主風速計下方 1.5 m 並接近該氣象塔所在地面以上,受測風力機輪轂高度之位置,建議在 輪轂高度 10 m 以內,若未安裝在鄰近輪轂高度時,則應依據 ISO2533 修正量測值至輪轂高度。建議將壓力感 測器安裝於可耐風雨的箱(weatherproof box)內,且確保箱子能通氣使壓力讀值不受箱子四周壓力影響。
3.3 懸臂長度計算
3.3
懸臂長度計算
安裝在懸臂上的風速計,若在氣象塔或懸臂之尾流內量測時,會受到氣象塔及懸臂引起之氣流畸變(flow distortion)影響,故風速計與氣象塔及懸臂間必須維持適當的距離,以保持氣流畸變效應達到可以接受之低標 準。建議低標準是氣象塔所引起之氣流畸變小於 1%,懸臂引起之氣流畸變小於 0.5%。
懸臂引起的氣流畸變,可將風速計設置在圓形懸臂以上,距離懸臂直徑的 15 倍,則懸臂造成之氣流畸變應可 低於 0.5%,建議距離為懸臂直徑之 25 倍。
氣象塔所引起氣流畸變對風速計之影響,取決於風速計與氣象塔之距離,距離決定應考量氣象塔的結構型式與 實體性(solidity),氣象塔結構可為:圓柱型氣象塔或格狀氣象塔。
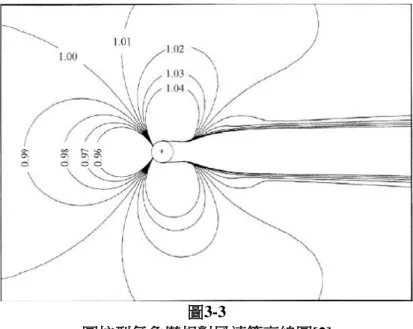
3.3.1 圓柱形氣象塔
圖 3-3 為應用納維-史托克方程式(Navier Stokes Equations)求取圓柱形氣象塔周圍,受氣流擾動之相對風速等高 線圖,圖 3-3 顯示通常在氣象塔上風處(即圖左側)會出現氣流減速,氣象塔側邊(即圖上下側)會出現氣流加速,
而氣象塔後方(即圖右側)會有尾流效應,此外面對風來向 45 度角時,所發生之氣流擾動最小。
圖 3-4 為以距離為函數之相對風速圖,根據此案例結果,入流風、風速計與氣象塔同一直線時之相對風速與距 離比關係如圖 3-4 所示,該距離比係指風速計距離圓柱形氣象塔中心(R)與圓柱型氣象塔結構件直徑(d)之比值,
當風速計距離圓柱型氣象塔中心的 8.2 倍直徑時,相對風速為 99.5%,當風速計距離圓柱型氣象塔中心的 6.1 倍直徑時,相對風速為 99%。故若氣流畸變需小於低標準 1%,風速計至少須遠離圓柱型氣象塔中心之 6.1 倍 直徑,即懸臂長度為 5.6 倍之圓柱型氣象塔直徑。
圖3-3
圓柱型氣象塔相對風速等高線圖[2]
3.3 懸臂長度計算
圖3-4
圓柱型氣象塔相對風速與距離關係圖[2]
3.3.2 格狀氣象塔
格狀氣象塔之氣流畸變可假定為推力係數(CT)的函數,而推力係數取決於格狀氣象塔的孔洞以及特定結構件的 阻力,為格狀氣象塔單位長度之總阻力除以動壓以及表面寬度(L3m),該值可由當地建築法規或是下表 3-1 估算 得,表中實體性 ts定義為格狀氣象塔垂直受風面之投影面積與總曝露面積的比值。圖 3-5 為二為空間的納維- 史托克方程式(Navier Stokes Equations)計算與驅動盤理論分析求取三角形格狀氣象塔(CT =0.5)之相對風速等高 線圖,當風速計與三角形格狀氣象塔連線和風向夾角為 90 度時,氣流畸變較小。圖 3-6 為入流風、風速計與 氣象塔同一直線時,三角形格狀氣象塔於不同推力係數下,相對風速與距離比關係圖,該距離比係指風速計距 離三角形格狀氣象塔中心(R)與三角形格狀氣象塔結構件迎風面寬度(L3m)之比值,參數定義如圖 3-7 所示。當 入流風、風速計與三角形格狀氣象塔同一直線時,如圖 3-7 所示,則中心線風速差(Ud)可由下式估算:
Ud= 1 − (0.062CT2+ 0.076CT) (L3m
R − 0.082)
當推力係數為 0.5,要求之相對風速為 99.5%時,風速計與三角形格狀氣象塔中心距離(R)應為結構件迎風面寬 度(L3m)之 5.7 倍。當推力係數為 0.5,要求之相對風速為 99%時,風速計與三角形格狀氣象塔中心距離(R)應為 結構件迎風面寬度(L3m)之 3.7 倍。
表 3-1
不同格狀氣象塔之推力係數 C
T [2]塔架型式 水平斷面 CT表示法 有效範圍
正方形橫截面,構件有尖銳邊緣 4.4(1-ts)ts 0.1< ts<0.5
正方形橫截面,圓形構件 2.6(1-ts)ts 0.1< ts<0.3
三角形橫截面,圓形構件 2.1(1-t)t 0.1< t<0.5
3.3 懸臂長度計算
圖3-5
三角形格狀氣象塔(C
T=0.5)之相對風速等高線圖[2]圖3-6
三角形格狀氣象塔相對風速與距離關係圖[2]
3.3 懸臂長度計算
3.3.3 流場模型評估
(a) 當氣象塔型式非屬於圓柱型或格狀,抑或氣象塔之結構件尺寸無法適用上述條件時,可藉由氣象塔 流場模型評估氣象塔設計之適當性。
氣象塔流場模型評估內容,應明確地表達應用的數值方法、軟體分析流程與方法,以及計算評估結 果,又以下流場評估影響因素應包含其中:
(i) 計算模型之合理性;
(ii) 計算流程之敏感度;
(iii) 計算邊界設定,包含入流風速的邊界層效應;
(iv) 環境設定;
(v) 黏性效應;
(vi) 精準度分析。
計算評估結果應包含氣象塔周圍之風速等高圖及風壓等高圖(不必無因次化),以呈現氣象塔對風速計 之氣流畸變影響。
(b) 若應用納維-史托克方程式(Navier Stokes Equations)為黏性流計算評估方法,除了應包含前述內容外,
亦應包含以下內容。
(i) 計算模型依評估問題所簡化之氣象塔幾何模擬,應對於模擬程序及結果作適當地解釋。
(ii) 計算數值方法的選用應包含以下內容於評估結果:
(1) 物理模型:計算結果易受到不同物理模型的影響,故評估結果須包含時間方法、流體特 性、黏滯狀態、紊流模型、壁面函數等數值方法的描述。
(2) 網格穩定性測試:適當評估計算網格之收斂性、近壁面網格佈置、跡流區網格佈置、計算 流域大小等影響。
(3) 邊界條件:計算模型之邊界條件。
(4) 環境設定:入流風速和風向。
(iii) 評估結果應包含:
(1) 含座標系統之計算流場模型圖。
(2) 風速計位置處俯視、前視及側視之網格佈置圖。
(3) 殘值收斂圖。
(4) 風速計位置之風速等高圖與結果值(不必無因次化)。
(5) 風速計位置之風速於入流方向分量(velocity component of inflow direction)等高圖與結果值 (不必無因次化)。
(6) 氣象塔總受力值。
3.4 風速計規格
3.4
風速計規格
3.4.1 通則
風速計為量測風速之儀器,風力機功率性能量測時應使用符合 3.4.2 要求之杯型風速計(cup anemometer)執行量 測。
3.4.2 杯型風速計分類
杯型風速計之分類由等級數字與等級類別指定之,如 1.7A、2.5B、2.5S。等級數字 k 為根據影響參數範圍(influence parameter ranges)決定其值,可應用兩種方法決定之。第一種方法是運用一般性影響參數範圍,獲得等級數字 k1,其值與風速計響應偏差之評估相關,而風速計響應偏差是經由影響參數範圍中改變所有影響參數而得。在 對應於下列公式的風速範圍內,決定等級數字 k,以做為最大風速計響應偏差(由水平風速之輸入值)。
wi= 5𝑚 𝑠⁄ + 0.5𝑈𝑖 k = 100max |εi/wi|
式中:
wi = 定義風速計響應偏前範圍之權重因數
εmax,i = 有風速範圍內任何風速數據組時之最大偏移量(m/s)
k = 等級數字
𝑈𝑖 = 區間為 i 時之風速
一般參數範圍可區分為兩個等級類別,參照表 3-2,第一等級類別為 A 級,代表場址地形評估符合 2.3.1 之要 求,第二等級類別為 B 級,代表場址地形評估不符合 2.3.1 之要求。
表 3-2
A 級與 B 級影響參數範圍(根據 10 分鐘平均值) A 級
地形符合 2.3.1 要求
B 級
地形不符合 2.3.1 要求 Min. Max. Min. Max.
涵蓋風速範圍(m/s) 4 16 4 16
擾流強度 0.03 0.12+48/V 0.03 0.12+0.96/V 擾流結構 (σu /𝜎v /𝜎𝑤1) 1/0.8/0.5
(non-isotropic turbulence)
1/1/1 (isotropic turbulence)
空氣溫度 (℃) 0 40 -10 40
空氣密度 (kg/m3) 0.9 1.35 0.9 1.35
平均氣流入射角度( ° ) -3 3 -15 15
註:
3.4 風速計規格
第二種決定影響參數之方法為指定一特定 S 級,配合要求等級數字 k,各別指定影響參數範圍。S 級之影響參 數範圍必須用類似表 3-2 之方式表示,然此等級之影響參數範圍可以在 A 級或 B 級以外,或與風力機功率性 能量測期間所確認之影響參數範圍2相關。
風力機功率性能量測位於場址地形評估符合 2.3.1 要求時,所使用之杯型風速計等級應優於 1.7A,若場址地形 評估不符合 2.3.1 要求,然而不必對試驗場址進行校正程序時,建議採用等級優於 2.5B 或 1.7S 之風速計。
3.4.3 杯型風速計性能評估
杯型風速計為分類而進行之風速測定評估,可由風洞(wind tunnel)試驗、其他實驗室試驗、現場試驗(field test) 和相關模型與外插方法求得。完整的評估方法宜涵蓋風洞試驗與現場試驗,並且交互確認試驗之結果。杯型風 速計的評估確認程序宜包含對杯型風速計操作造成影響之基本特性:
- 角度響應特性(angular response)。
- 由於不同轉子加速與減速力矩而造成的動態效應(dynamic effects)。
- 軸承的摩擦力矩(friction torque)。
(a) 以風洞量測角度響應特性
風洞中量測杯型風速計角度響應特性為,在風速分佈範圍在 4m/s 至 16m/s 之間,選取三種風速下(建 議為 5, 8 及 12 m/s 三種風速),入流傾斜角度之改變範圍至少從-30 度至+30 度,且用於角度特性量 測之解析度宜於 2 度之範圍內,進行杯型風速計之角度響應特性量測。角度響應之測量結果範例如 圖 3-8 所示。用於風力機功率性能量測之杯型風速計,其角度響應特性宜為餘弦型式。
圖3-8
杯型風速計之測量角度響應與餘弦函數之對照[3]
(b) 風洞中加速與減速力矩量測
杯型風速計因不同轉子加速與減速力矩而造成的動態效應可在風洞中量測,量測方法為在杯型風速 計轉子的頂部加裝一細長軸,當杯型風速計因為風洞中的空氣速度而旋轉時,細長軸對風速計施加 一反向相等的力矩,此力矩為軸心之抗力矩(reaction torque),也就是杯型風速計的轉子力矩。當杯型
3.4 風速計規格
圖3-9
風洞風速8m/s下杯型風速計之扭矩量測[3]
(c) 軸承摩擦力矩量測
杯型風速計之軸承摩擦力矩量測,應以飛輪代替杯型風速計轉子,利用對應於 20 m/s 的轉速測得減 速度以量測轉子之摩擦力矩。量測轉子之摩擦力矩為軸承之摩擦力矩與飛輪之空氣摩擦力矩,其中 飛輪之空氣摩擦力矩要從實測力矩中扣除。圖 3-10 為軸承摩擦力矩量測結果範例。
圖3-10
軸承摩擦力矩量測範例[3]
至少應評估同一類型的 2 具風速計。任何會影響杯型型風速計摩擦力矩的任何外部幾何形狀的變更、
或內部設計改變時,就要重新評估風速計。
風速計於投入功率性能試驗前,建議用符合該項類別之內容來確認風速計的幾何形狀。
3.4 風速計規格
3.4.4 性能評估範例
實際評估杯型風速計時,可採取以下兩種範例之方法,但亦可採取其他評估方法,然這些方法須包含確認程序 及 3.4.3(a) ~3.4.3(c)之三項基本特性。
(a) 根據風洞試驗、實驗室試驗與現場量測比對之杯型風速計評估法 (i) 不同平均氣流入流角在擾流下的角度響應特性
(1) 0°之平均氣流
對於不同之平均氣流入流傾角來計算擾流中的角度響應。例如,在一平坦的測量現場,宜 先考慮平均氣流入流角為 0°的情況,擾流的情況用擾流強度(turbulence intensity, TI)來表 示,如下式。
TI = σu/𝑈
其中σu為水平風速標準差,𝑈為平均水平風速。
杯型風速計在擾流狀況下的角度響應特性取決於擾流的垂直分量,而水平風速之標準差 應小於垂直風速之標準差(應使用σv= 0.8𝜎u,其中σv為垂直風速標準差)。
關於不同擾流強度的氣流入流機率參考圖 3-11。
圖3-11
不同擾流強度下垂直風速分量之機率分佈[3]
(假定水平風速與垂直風速標準差的比例固定)
其後將圖 3-11 給定之機率乘上所有角度的角度特性與理想餘弦之差異,參考圖 3-12,所 得之值代表特定擾流強度下實測風速計與理想風速計的偏差。重覆上述步驟即可獲得實 測風速計在不同擾流強度下之結果,參考圖 3-13。在圖 3-13 中擾流強度為 10%時實測風 速計與理想餘弦響應的相依度為 0.993。
3.4 風速計規格
圖3-12
實測響應與理想響應之偏差值與對應發生機率[3]
圖3-13
不同擾流強度下實測風速計與理想餘弦響應相依度[3]
(2) 從-20°至 20°之平均氣流
若在複雜地形中,平均氣流角度不為 0°之情況,在某一平均氣流入流角下,其氣流入流 角度之機率有其最大值,參考圖 3-14。對於平均氣流入流傾角範圍為-20°至 20°(並以 5°
為量測間距)且垂直風速的擾流強度會改變時,須計算風速計之響應且須記錄與理想餘弦 響應的偏差值(參考圖 3-15)。從這些結果可定義出等級 1 級的風速計其平均氣流入流角與 擾流強度的範圍。在前述的操作範圍內,該等級的風速計與理想餘弦響應之間的偏差小於 1%。
3.4 風速計規格
圖3-14
3種不同平均入流角度之機率分佈[3]
圖3-15
不同擾流強度下與不同平均入流角度之實測響應與理想餘弦響應之相依度[3]
(ii) 非穩定(non-stationary)氣流條件造成之動態效應
因杯型風速計角度特性造成的非穩定氣流,除了影響上述的角度響應偏差外,亦可能會產生動 態效應,稱為空氣動力超速(aerodynamic over-speeding),此動態效應須以現場試驗進行探討。現 場試驗需在 30 m 的高度,將待分類的杯型風速計與校正過的超音速風速計進行量測比較,以了 解此風速計與擾流強度相關的超速影響程度。與擾流強度相關之超速效應(用杯型風速計與超音 速風速計測量值的斜率之差異表示)宜量測並記錄之,參考圖 3-16。
3.4 風速計規格
圖3-16
風速計不滿足斜率標準之範例[3]
(iii) 軸承摩擦力
風速計在風洞內進行校正時,其試驗溫度通常為室溫,但實際情況中風速計會在廣大的溫度範 圍下操作,因此在該溫度範圍下宜調查風速計輸出的偏差值,等級 1 級之風速計在該溫度範圍 下,其輸出偏差值不宜超過 1%。
根據上述程序,由於偏差可能為正值或負值,故在功率曲線量測之操作影響參數範圍內,1 級風 速計總偏差值不宜超過 1%。
(b) 根據風洞實驗、實驗室試驗與杯型風速計模型之評估方法 (i) 評估方法
根據風洞實驗與實驗室內所測出之杯型風速計的基本特性,以及杯型風速計的數值模型與計算 資料,決定出所有影響參數範圍的響應。
(ii) 杯型風速計之模型建立
杯型風速計模型須符合下述兩條件,始得用於任何響應之計算:
(1) 模型符合風速計(於風洞試驗與實驗室試驗測得)之所有基本特性,包含角度響應特性、與 風速比相關之扭矩係數以及摩擦力等。
(2) 模型符合風速計本身的物理特性,如轉子慣量、風速計測速杯面積與測速杯距離中心的半 徑值等。
藉由驅動扭矩之微分方程式求得杯型風速計之響應,其中轉子扭矩為空氣動力扭矩(𝑄𝐴)與摩擦 力扭矩(𝑄𝑓)之合,方程式如下:
dω
3.4 風速計規格
Ueq= 𝐹𝑎(𝛼, |𝑈⃑⃑ |) ∙ (𝑈⃑⃑ )
氣動扭矩可以表示為:
QA=1
2𝜌𝐴𝑅𝑈𝑒𝑞2 𝐶𝑄𝐴(𝜆)
式中:
𝜌 = 空氣密度
𝐴 = 風速計測速杯的面積 𝑅 = 距離杯之半徑值 Ueq = 等效水平風速
Ut = 門檻風速(當減去摩擦力影響時,求得門檻風速作為校正偏差之剩餘質;若摩擦力 為 0,門檻風速等於校正偏差)
𝐶𝑄𝐴 = 廣義空氣動力轉子扭矩係數
廣義之空氣動力轉子扭矩係數可由風洞試驗扭矩量測之結果求得,其中Ueq在此情況下等於風洞 之風速:
CQA= 𝐶𝑄𝐴(𝜆) = 𝑄𝐴
1
2𝜌𝐴𝑅𝑈𝑒𝑞2
廣義之空氣動力轉子扭矩係數為速度比之函數:
λ = ωR Ueq− Ut
由摩擦測量之結果可知,摩擦扭矩為溫度與轉速之函數:
Qf= Qf(T, ω)
(iii) 決定影響參數範圍變化與風速計等級
風速計之影響參數範圍可能隨著三維風之擾流模型而有變動,故將杯型風速計之模型置於此模 擬風場中模擬 10 分鐘的風速響應,重覆此步驟可模擬出考慮所有影響參數範圍的模擬值,並進 一步比較模擬值與相同風況下的理論精確值之偏差,根據偏差值即決定該風速計之等級,圖 3- 17 為 2.0A 級之杯型風速計之範例。
3.5 現場比對
圖3-17
2.0A級杯型風速計之偏差值範例[3]
3.5
現場比對
3.5.1 通則
應證明使用於功率性能量測之主風速計,其校正結果不會在風力機性能量測期間發生改變。於量測結束後,可 將風速計置於風洞內進行校正,以求得其與上次校正之差異。另一種可行之方法為:於量測期間在主風速計附 近,安裝對比用風速計(control anemometer)執行現場比對。需要留意一種情況就是,若主風速計與對比用風速 計逐漸偏離校正值,且兩者以相似之速度劣化,則現場比對之方法則無法辨識。
3.5.2 前提
於測量期間兩個風速計依照 3.1.4 之方式安裝於氣象觀測塔上。主風速計用於風力機功率性能量測,而對比用 風速計用於比對主風速計之測量,且可使用兩種不同方式安裝風速計。
第一種安裝方式:階層式風速計設置,參考 3.1.1 圖 3-1。
第二種安裝方式:平行式風速計設置,參考 3.1.2 圖 3-2。
3.5.3 實現
測量期間記錄之 10 分鐘分平均值都要列入考量。針對風速範圍在 6 m/s 至 12 m/s 之間且狹窄風向扇型區間之 數據進行過濾(例如根據測量區間,將中心線與懸臂夾 90 度角之±20°或±40°扇形區間)。建議利用區間為 1 m/s(對 比用風速計之風速)之區間法分析兩具風速計之測量結果的相關。
從測量初期直到完成,所有 1 m/s 區間(每個區間至少三個數值且最長時間為 8 週)利用對比用風速計做為相關 變數,主風速計做為獨立變數進行線性迴歸。
決定線性迴歸係數後,就可利用以下公式:
3.6 風能遙測感應器(wind energy remote sensing)
(a) 各區間至少取樣 30 分鐘之數據。
(b) 利用各風速數據組,計算修正後之對比用風速計(νcontrol_corr)以及主風速計(νprimary)的風速數據組平 均差異(系統偏差)與風速數據差額的標準不確定度(統計偏差)。各風速數據組的系統偏差與統計偏差 的平方和應小於 0.1 m/s。
3.6
風能遙測感應器(wind energy remote sensing)
3.6.1 通則
本準則所述之風能遙測感應器,係指現今多應用於風能資源評估時,使用聲音波與光學技術進行風能資訊之偵 測與蒐集。使用聲音波為技術背景之遙測感應器,俗稱聲達(Sonic Detection And Ranging, SODAR),使用光學 為技術背景之遙測感應器,俗稱光達(Light Detection And Ranging, LIDAR),該些遙測感應器便於攜帶運用於不 同之量測場址,並可量測與風力機輪轂高之風速、風向及垂直風速分佈圖,不同遙測感應器機型亦可測得風場 之紊流程度。
然而可能使用者對於遙測感應器缺乏正確使用認知與經驗,不同場址對數據量測造成之差異性,短期量測可能 造成之風能評估結果失準等情況,使得欲藉由遙測感應器獲取風場風能資訊仍需謹慎評估與執行。本準則針對 此遙測感應器之文件準備、設置與操作及數據確認做一建議性說明。
3.6.2 遙測感應器之文件準備 遙測感應器之文件應包含以下資訊:
(a) 遙測感應器之設置:
(i) 設置場址周圍 360 度之地形與地貌攝影圖。
(ii) 設置場址可視範圍內之平面地形資訊說明與示意圖,應包含地形斜率、地形摩擦度、障礙物尺 寸與位置等,又可視範圍應不小於 3 公里。
(iii) 若遙測感應器為聲達(SODAR),則應載明設置場址可能存在之回聲源、大氣與環境噪音源等。
(iv) 確認遙測感應器之水平度。
(v) 確認遙測感應器之感測源方位。
(b) 遙測感應器之機構:
(i) 遙測感應器之製造商、型號、序號。
(ii) 遙測感應器所搭配之軟體、韌體與硬體版本,與相互間搭配性確認,若量測期間有所更動,亦 需載明之。
(iii) 輔助訊號感應器之製造商、型號與數據轉換型式,如雨量計等。
(iv) 遙測感應器之量測圓錐角度範圍。
3.6.3 遙測感應器之設置與操作
(a) 遙測感應器之設置應避免障礙物、噪音及複雜氣流之影響:
(i) 若遙測感應器為聲達(SODAR),應避免周圍樹叢聲響影響數據量測,最保守應清除欲量測高
3.6 風能遙測感應器(wind energy remote sensing)
(iv) 若遙測感應器為聲達(SODAR),應避免設置臨近明顯存在之回聲源、大氣與環境噪音源。
(v) 若遙測感應器為聲達(SODAR)且有附屬固定裝置時,應避免此些附屬固定裝置影響數據量測。
(b) 遙測感應器之操作:
(i) 最新版之軟體、韌體與硬體版本應於量測前,與遙測感應器製造商確認。
(ii) 若於數據量測結束前,遙測感應器製造商公佈新版之軟體、韌體與硬體版本,則建議執行一次 性數據確認測試。
(iii) 於量測期間,應禁止任何遙測感應器之機構變更,除非不得已。
(iv) 數據存取量應足夠,不足量的量測數據可能導致後續年發電量推估時的錯誤判斷,意即錯誤 引用短時間或季節性明顯之數據樣本來代表該測試場址之年度風能狀況。
(v) 操作前謹慎規劃數據量測相關事宜。
3.6.4 遙測感應器之數據確認
遙測感應器之數據可靠度確認,可藉由臨近氣象塔所量測之數據進行比對確認,若場址之地形與地貌狀況良好,
該數據比對可信度更佳,亦可減少後續數據處理之不確定度考量。建議之數據確認頻率為每半年一次,或軟體、
韌體與硬體版本更新時。遙測感應器與臨近氣象塔之設置距離應考慮之,若遙測感應器為聲達(SODAR)時,應 避免過於接近氣象塔導致回聲影響數據量測,通常設置離臨近氣象塔 60~150 公尺;若遙測感應器為光達 (LIDAR)時,通常可直接設置於氣象塔旁。遙測感應器宜置於臨近氣象塔底部之水平高度 5 公尺內。
量測時段內之數據確認存取量應足夠,用以考量後續之不確定度來源,且不適當之量測數據,如氣象塔儀器或 遙測感測器故障時段、氣象塔之流場影響、低訊號量測區間等,應謹慎予以剔除以提高數據比對之可信度。建 議最短數據比對時間至少 1 個月,包含不同之大氣環境狀況,以判斷量測數據間之關聯性,而最短有效比對數 據以涵蓋該測試場址特徵風速與風向需多於 48 小時,其中應包含至少兩個 12 小時於 4~16 m/s 風速區間之數 據資料,如分別累積 12 小時 4~8 m/s 及 12 小時 8~16 m/s 之數據;若該區域風速值較高,可選擇累積 12 小時 4~10 m/s 及 12 小時 10~16 m/s 之數據。
3.6 風能遙測感應器(wind energy remote sensing)
參考文獻
[1] IEC 61400-12-1 Power performance measurements of electricity producing wind turbine Annex A
[2] IEC 61400-12-1 Power performance measurements of electricity producing wind turbine Annex G
[3] IEC 61400-12-1 Power performance measurements of electricity producing wind turbine Annex J