行政院國家科學委員會專題研究計畫 成果報告
無線感測網路之移動式節點佈置
計畫類別: 個別型計畫
計畫編號: NSC94-2213-E-011-052-
執行期間: 94 年 08 月 01 日至 95 年 07 月 31 日 執行單位: 國立臺灣科技大學資訊工程系
計畫主持人: 項天瑞
計畫參與人員: 王敬堯、洪士為
報告類型: 精簡報告
處理方式: 本計畫可公開查詢
中 華 民 國 95 年 10 月 31 日
行政院國家科學委員會專題研究計畫成果報告
無線感測網路之移動式節點佈置
Sensor Positioning in Mobile Sensor Networks 計畫編號:NSC 94-2213-E-011-052-
執行期限:94 年 8 月 1 日至 95 年 7 月 31 日
主持人:項天瑞 國立台灣科技大學資訊工程系 計畫參與人員:王敬堯、洪士為
一、中文摘要
在網路硬體科技的快速進步下,以低 製造成本並且具有基本通訊及計算能力的 感測器進行特定任務已然成為趨勢。在危 險或者是其他不易進出的環境中執行計算 時,感測網路本身的連通性與持久性佔有 重要角色。本計畫以具有移動能力之感測 器為基本架構,各感測器將其周圍有限資 訊作為判斷根據進行移動,其目的在於擴 大整體感測面積,同時維持各感測器所負 責之小感測範圍。本計畫預期針對此目標 設計演算法並進行模擬實驗分析。
關鍵詞:感測網路、動態節點、覆蓋問題。
Abstract
Due to the rapid development of the technologies of the networking hardware, it is inevitable to conduct certain tasks with low-cost devices equipped with basic communicating and computing capabilities.
While the sensor nodes are performing computations in hazardous environments, the connectivity and the lifespan of the network play important roles. This project studies the covering effectiveness of networks with mobile nodes. In the network, every sensor node moves according to the limited sensory information of its surrounding to maximize the global coverage, while maintaining the connectivity condition at the same time. This project focuses on the design of the moving heuristics and the evaluation of their performance.
Keywords :sensor network, mobile node,
coverage problem.
二、緣由與目的
近年來,基於網路硬體科技的快速發 展,無線感測網路已然成為一個合乎實際 需求的研究領域。使用低成本的感測節點 執行特定任務的模式有許多應用。例如,
在具有危險性的環境中,感測網路的使用 較實際人員的應用更具安全性且成本低 廉。茲列舉幾項感測網路的實際應用:
敵人偵測;
環境監控;
地理資訊探勘。
在多數情況下,感測網路所使用的網 路節點具有幾點特性,即製造成本低廉、
可拋棄式、有限的通訊與計算能力、有限 的能源供應等等。基於感測網路使用環境 的不同,網路節點間常因為機件故障、電 力耗盡、遭受破壞等原因失去聯繫,更因 而對於網路的拓樸結構產生相當大的影 響。因此,感測網路所使用的演算法必須 格外注重其延展性、穩定性與強固性。
許多感測網路領域的問題亦出現在其 他研究領域。例如,”畫廊問題”探討多邊 形中的最小覆蓋數[6]。此問題即使在簡單 多邊形上也是一個 NP-Hard 的問題。當感 測網路被用於監控環境時,我們希望利用 最少化節點的使用數量,這個問題可視為 畫廊問題的衍生問題,而為此開發的逼近 演算法即可用於感測節點的佈置。
本計畫探討的問題與多機器人的行為 規劃問題息息相關。常見的多機器人行為 規劃問題如下:
列隊問題:此問題研究機器人如何合 作已排成特定隊形[5,21];
探勘問題:此問題研究機器人的移動
路徑以學習未知空間[4,15];
群集問題:此問題研究如何模擬生物 行為以完成特定任務[2]。
本計畫研究感測網路覆蓋問題的一個 衍生問題,即假定感測節點具備極有限的 移動能力,則節點間應如何合作已達到最 佳覆蓋效果。過去的覆蓋研究多利用靜態 節點,並在節點佈置後分析網路覆蓋的特 性[11,14,24,26]。在節點數量龐大的網路 中,感測器的覆蓋情況多半變化甚大,本 計畫評估機動式感測器根據周遭環境資訊 所決定的移動方式,並根據感測網路的性 質提出建議方式。
三、結果與討論
在本節我們分別對 Voronoi Diagram 和 Potential Field 這 兩 種 方 法 做 模 擬 實 驗,比較覆蓋面積與感測節點數和通訊半 徑之間的關係,並且觀察節點遺失率的變 化。在實驗中,我們利用節點的座標來計 算兩個節點間的距離,取代用訊號強度來 推算距離。在計算覆蓋面積方面,因為必 需考慮網路是連通的,所以網路若是被分 為 兩 個 以 上 的 連 結 成 份 (Connected Components)時,則計算覆蓋面積時會取覆 蓋面積最大的連結成份來計算,因此若是 網路含有兩個以上的連結成份時,覆蓋面 積會受很大的影響。而覆蓋範圍計算方式 如圖 1 所示,除了 S1 部份為感測節點的覆 蓋範圍以外,我們同時計算被感測節點所 包圍的 S2 範圍。當攻擊節點並非在感測節 點的感測範圍,而是位在 S2 區塊的範圍 時,若其想移動到周圍感測節點以外的區 域,或者是當此攻擊節點想傳送資料出去 也需透過其他周圍的感測節點來傳送勢必 會被周圍的感測節點偵測到,所以在計算 覆蓋面積時同時考慮感測範圍及被感測節 點包圍的面積。在節點遺失率方面,判斷 各個節點在移動後是否維持原本鄰近通訊 節點所建立的連結。網路是否連結與鄰居 數有關。當鄰居愈多,則網路的連結可能
性愈高。通訊半徑大小影響著網路的連通 的機率。
圖 1:覆蓋面積計算方式
網路大小 800x800
節點分佈 隨機分佈的連通圖
節點數目 50 到 100
感測半徑 30
通訊半徑 2 倍到 9 倍感測半徑
實驗數值 50 次取平均
表 1 實驗環境的參數設定
方法一:Potential Field
當感測節點部署完畢之後,每個感測節點 計 算 由 鄰 近 節 點 所 產 生 的 Potential Field,得到移動向量和(圖 2),作為之後 感測節點移動的依據,其中移動向量和的 公式:
( m p
i/ ) w
2i
ke
,m 為 p 的鄰居,w i
及 k 為常數,分別感測半徑為與排斥作用
力強度。
for each sensor node p {
for each sensor node q,
p q
{if distance(p, q) <
Communication_Range q is p's neighbor
} }
圖 2:尋找鄰近節點
當感測節點 p 算出移動方向,要決定移動 距離時,其將感測節點最大可移動的距離
(move_limit)切成十個單位,算出移動 距離為此單位時,是否仍與原本鄰近節點 保持連結,一旦會發生遺失鄰近結點時,
則退回上一個單位。
unit = move_limit / 10 for each sensor node p {
For i = 1 to 10 if(lose neighbor)
take_distance = (i-1)* unit }
圖 3:Potential Field 演算法
方法二:Voronoi Diagram
當感測節點部署完畢之後,每個感測節點 計算與鄰近節點的 Voronoi Diagram,並以 本身 Voronoi 鄰居節點位置作為移動的依 據。
感測節點 p 與其鄰近節點移動的方向及距 離受到兩者之間的距離所影響,當距離越 近 p 可以移動的距離越短,以保持 p 與其 鄰近節點仍然連通。節點 p 受到其鄰近節 點的影響移動開始移動(圖 4)。其中,
i i
pn 為感測節點 p 的移動向量和,n 為 i
感測節點 p 的所有 Voronoi 鄰居節點,
i i
pn
為 感 測 節 點 p 的 移 動 距 離 。 move_limit 為感測節點最多可移動的距 離,在我們的方法裡面最大可移動的距離 等於感測範圍。若根據 Voronoi 鄰居所計算出的可移動距離(
i
i
pn
)大於感測節點最大可移動的距離(move_limit)時,
將 p 最後移動的距離設定為最大可移動的
距離,
p vector
為 p 經過與其 Voronoi 鄰居作用力計算後的移動向量,
n 為 p 的 Voronoi j
鄰居對於 p 的作用力向量與p vector
為同一 半平面的向量;location 為最後感測節點 p 移動到的位置,為了減少遺失率利用 p 的 Voronoi 鄰居對於 p 的作用力向量在 p 欲移動的向量(p vector
)上的投影向量中長 度 最 短 者 最 為 最 後 的 移 動 向 量(location)。
for each sensor node p {
if
i
i
pn
>move_limitvector
p
=move_limit i
i i
i
pn pn
else
vector
p
=i
i
pn
if |min(projection of n j
on
p vector
)| >|p vector
| location=p vector
elselocation=min(projection of
n on j p vector
)}
圖 4:Voronoi Diagram 演算法 評估系統效能的準則
1. 平均節點遺失率:節點遺失率表示當 每次節點移動後,是否還維持著與原 本可通訊鄰近節點的關係。遺失率越 小表示無線感測網路維持連通的機率 越高。計算方式如公式(1)、(2):
final
initial final
initial
PF
Neighbor
Neighbor Neighbor
Neighbor
LR ( )
final
initial final
VD
Neighbor
Neighbor Neighbor
VDVertex
LR ( )
其中LR 及
PF
LR 分別為為 PotentialVD
Field 及 Voronoi 的節點遺失率。initial
Neighbor 為 移 動 前 的 鄰 近 節 點 數, VDVertex 為移動前的 Voronoi Vertex 數目。Neighbor
final
為移動後 的鄰近節點數。2. 平均網路覆蓋面積增進率:網路覆蓋 面積增進率指的是原本感測網路所形 成的覆蓋面積,與節點移動後所形成
的覆蓋面積比率。在整體感測網路不 連通的情況下,計算感測網路的覆蓋 面積時是取最大的連結成份來計算。
計算方式如公式(3):
initial initial final
average
Coverage
Coverage Coverage
provement
Coverageim
其 中
CoverageImprovement average
為 平 均 網 路覆蓋面積增進率,Coverage Initial
為感測圖 5:感測節點數為 50 ~ 80,各方法的綜合比較 網路剛部署時的覆蓋面積,
Coverage Final
為移動後整個感測網路的覆蓋面積。
模擬環境一:改變通訊半徑
圖 5 及圖 6 為 800x800 的網路大小下 的模擬,在隨機分佈情況下,總節點數從 50 到 100,感測半徑為 30。
在此實驗中,我們以通訊半徑為變數 做為模擬依據。因為我們認為通訊半徑影 響一個感測節點的鄰近節點數。隨著通訊 半徑越大,一個感測節點的鄰近節點數也 會隨之增多。而當鄰近節點數越多,整體 網路連結的可能性越高的情況下,推論網 路覆蓋面積與通訊半徑之間的關係。
藉由相同節點數量,通訊半徑改變,
我們可以明確的看出來:當通訊半徑越 大,每個模擬的平均遺失節點數越少,但 是改善幅度到通訊半徑為 6 倍以後,漸為 趨緩。在 Potential Field 方法中,網路 覆蓋面積隨著通訊半徑越大,有越明顯的 改善,這是因為當感測節點移動,通訊半 徑越大,所決定的可移動距離也會跟著變 大。從圖表中可以看出 Voronoi 方法在節 點數 50 到 100 之間的覆蓋面積增加率變 化大約在 13%到 20%之間,而且在到達特定 門檻值的感測範圍時,覆蓋面積就不再增 加,這是因為 Voronoi 方法所定義的鄰居 節點是 Voronoi 鄰居數,並非所有在通訊 範圍內的感測節點,因此即使增加了通訊 範圍使每個感測節點可以看到更多的節
點,但是它的 Voronoi 鄰居數並不因此改 變,所以並不影響最後的計算結果,而覆 蓋面積在到達一定門檻值後不再改變。
從實驗結果數據我們可以得知通訊半 徑越大,對整體網路的平均遺失率有明顯 的改善,但是改善幅度到通訊半徑為 6 倍
以後漸為趨緩。對於感測節點而言,通訊 半徑越大表示需耗費感測節點越大的電 力,因此對於感測網路的存活時間有很大 的影響。
圖 6:感測節點數為 90 ~ 100,各方法的綜合比較
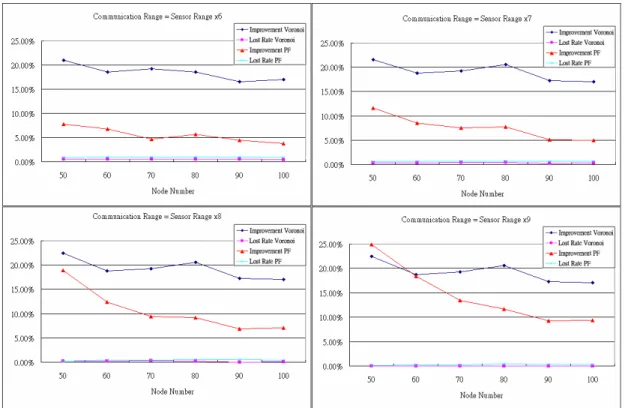
圖 7:通訊半徑為 2 ~ 5 倍,各方法的綜合比較
圖 8:通訊半徑為 6 ~ 9 倍,各方法的綜合比較 模擬環境二:改變感測節點數量
圖 7 及圖 8 為 800x800 的網路大小下 做的模擬,在隨機分佈情況下,通訊半徑 從 2 倍感測半徑到 9 倍,感測半徑為 30。
在此實驗中,我們以感測節點數量為 變數做為模擬依據。我們考量感測節點數 量增加可否增進覆蓋面積比例。藉由相同 通訊半徑及感測節點數量的改變,模擬結 果顯示在節點數目越少的情況下,覆蓋面 積增加率會比較大,隨著節點數的增加,
覆蓋面積增加率逐漸減少,主要是因為節 點數大一開始的覆蓋面積就大,而每個節 點所能移動的距離有限,因此相較於節點 數目小的環境其覆蓋面積增加率就會比較 小。在節點遺失率方面,同一個通訊範圍 內,節點遺失率幾乎不受到節點數目的影 響。
四、成果自評
本 計 畫 分 別 由 Potential Field 及 Voronoi Diagram 的觀點評估機動式感測 網路的覆蓋改進演算法。節點利用周遭資
訊進行局部性的覆蓋修正,周遭資訊來自 鄰居節點,其中 Voronoi Diagram 所考慮 的是 Voronoi 鄰居,而 Potential Field 所考慮的是所有在感測範圍內的節點。因 此,Potential Field 會受到較多節點的影 響,但 Voronoi Diagram 所考慮的 Voronoi 鄰居是在感測節點附近的節點,對於感測 節點造成的影響是它可以移動更多的距 離,而同時也容易導致節點遺失率較高,
此外 Voronoi Diagram 需要維持每個感測 節點的 Local Voronoi Diagram,因此所需 的計算量也比 Potential Field 來的高。
由實驗結果而言,在感測半徑與通訊半徑 差異不大的網路環境之下,使用 Voronoi Diagram 在覆蓋面積增加率會有比較好的 效能,但是在節點遺失率方面,平均都比 Potential Field 還來得差。相反的,在感 測半徑與通訊半徑差異很大的網路環境之 下,使用 Potential Field 在覆蓋面積增 加率及節點遺失率都有很明顯的效能,但 是卻不合乎實際上的需求,而且若把電力 因素考慮進來的話,則整體的網路存活時 間會有很大的影響,因為 Voronoi Diagram
的時間複雜度較高,因此相對於 Potential Field,耗電量相對的也比較多,因此在不 考 慮 耗 電 量 的 情 況 下 , 使 用 Voronoi Diagram 為較佳的選擇。本計畫進行的模擬 尚未考慮到感測節點在電力方面的實際消 耗,當通訊半徑越大或移動距離越遠,所 需要通訊電力也會跟著越大。當感測節點 的電量耗盡,也影響著整體的網路存活時 間,使系統效能降低。在未來的工作方面,
我們希望在考慮感測節點的電量因素下,
能夠有效地延長網路存活時間,並且讓節 點之間能夠彼此協調,保持電量均衡。除 此之外,亦可規劃感測節點的睡眠機制以 節省電源,增加節點的生命週期。
五、參考文獻
[1] Akyildiz, W. Su, Y.
Sankarasubramaniam, and E. Cayirci. A survey on sensor networks, 2002.
[2] G. Beni and J. Wang. Swarm
intelligence in cellular robotic systems.
In Proc. NATO Adv. Workshop on Robotics and Biological Systems, 1989.
[3] A. M. Bruckstein, C. L. Mallows, and I.
A. Wagner. Probabilistic pursuits on the grid. American Mathematical Monthly, 104(4):323-343,1997.
[4] G. Dudek, M. Jenkin, E. Milios, and D.
Wilkes. Map validation and robot self-location in a graph-like world.
Robotics and Autonomous Systems, 22(2):159{178, November 1997.
[5] A. Dumitrescu, I. Suzuki, and M.
Yamashita. High speed formations of reconfigurable modular robotic systems.
In Proceedings of the IEEE International Conference on Robotics and
Automation (ICRA '02), pages 123-128, 2002.
[6] A. Howard, M. Mataric, and G.
Sukhatme. Mobile sensor network deployment using potential _elds: A distributed, 2002.
[7] T.-R. Hsiang, E. M. Arkin, M. Bender, S. P. Fekete, and J. S. B. Mitchell.
Algorithms for rapidly dispersing robot
swarms in unknown environments. In Fifth International Workshop on Algorithmic Foundations of Robotics, December 15-17 2002.
[8] T.-R. Hsiang, E. M. Arkin, M. Bender, S. P. Fekete, and J. S. B. Mitchell.
Online dispersion algorithms for swarms of robots. Accepted, 19th Symposium on Computational
Geometry, Multimedia Session, 2003.
[9] T.-R. Hsiang, N. Jovanovic, and M. O.
Sztainberg. Experimental comparison of dispersion protocols for robot swarms.
Technical report, Stony Brook University, 2002.
[10] T.-R. Hsiang and M. O. Sztainberg.
Pheromone-guided dispersion for swarms of robots. In Nineteenth European Workshop in Computational Geometry, 2003.
[11] C.-F. Huang and Y.-C. Tseng. The coverage problem in a wireless sensor network. In WSNA '03: Proceedings of the 2nd ACM international conference on Wireless sensor networks and applications, pages 115-121. ACM Press, 2003.
[12] S. Kumar, T. H. Lai, and J. Balogh. On k-coverage in a mostly sleeping sensor network. In MobiCom '04: Proceedings of the 10th annual international
conference on Mobile computing and networking, pages 144-158. ACM Press, 2004.
[13] M. J. Mataric. Designing emergent behaviors: From local interactions to collective intelligence. From Animals to Animats 2, pages 432-441, 1992.
[14] S. Meguerdichian, F. Koushanfar, M.
Potkonjak, and M. B. Srivastava.
Coverage problems in wireless ad-hoc sensor networks. In INFOCOM, pages 1380-1387, 2001.
[15] J. Mitchell. Geometric shortest paths and network optimization, 1998.
[16] J. O'Rourke. Art Gallery Theorems and Algorithms. The International Series of Monographs on Computer Science.
Oxford University Press, New York, NY, 1987.
[17] J. H. Reif and H. Wang. Social potential
fields: A distributed behavioral control for autonomous robots. Robotics and Autonomous Systems, 27(3):171-194, 1999.
[18] P. R. U. Shashi. Survey on sensor networks.
[19] S. Slijepcevic and M. Potkonjak. Power E_cient Organization of Wireless Sensor Networks. In IEEE International Conference on Communications (ICC), Helsinki, Finland, Jun 2001.
[20] W. M. Spears and D. F. Gordon. Using arti_cial physics to control agents. In Proceedings of IEEE International Conference on Information, Intelligence, and Systems, pages 281-288, 1999.
[21] I. Suzuki and M. Yamashita. Distributed anonymous mobile robots: Formation of geometric patterns. SIAM Journal on Computing, 28(4):1347-1363, 1999.
[22] I. Wagner, M. Lindenbaum, and A.
Bruckstein. Distributed covering by ant-robots using evaporating traces.
IEEE Trans. Rob. Aut., pages 918-933,
1996.
[23] I. A. Wagner, M. Lindenbaum, and A.
M. Bruckstein. E_ciently searching a graph by a smell-oriented vertex process.
Annals of Mathematics and Arti_cial Intelligence, 24(1-4):211{223, 1998.
[24] X. Wang, G. Xing, Y. Zhang, C. Lu, R.
Pless, and C. Gill. Integrated coverage and connectivity con_guration in
wireless sensor networks. In SenSys '03:
Proceedings of the 1st international conference on Embedded networked sensor systems, pages 28-39. ACM Press, 2003.
[25] B. Yener, M. Inanc, and M.
Magdon-Ismail. Power optimal connectivity and coverage in wireless sensor networks. Technical report, Department of Computer Science, Rensselaer Polytechnic Institute, 2003.
[26] Z. Zhou, S. Das, and H. Gupta.
Connected k-coverage problem in sensor networks. In ICCCN, pages 373-378, 2004.