The Accuracy And Reliability Analysis For Future GNSS In Taiwan Region
Meng-Lun Tsai
1Kai-Wei Chiang
2Ming Yang
3Ho-Chin Chen
4ABSTRACT
The indices of evaluating the performance of GNSS are composed of satellite availability, positioning accuracy, integrity and reliability. The future GNSS including stand alone modernized GPS, Galileo or GPS/Galileo integrated system will support more satellites, more observable frequencies and better signal quality comparing to current GPS. Therefore, the positioning accuracy, reliability and efficiency can further be enhanced. For surveying communities, those improvements are very critical. Since the compatibility between modernized GPS and Galileo is enhanced in the design phase and both of them will share two frequencies (L1/E1, L5/E5a), therefore, the receiver supporting dual-systems and dual-frequencies will dominate the geodetic grade GNSS receiver market in the future based on the accuracy enhancement and cost anticipated. This study aims at using the GNSS software simulator developed in the department of Geomatics, NCKU to analyze the three dimensional positioning accuracy, internal reliability (MDB) and external reliability (MDE) in Taiwan region based on three different scenarios including stand along modernized GPS, Galileo and GPS/Galileo integrated system.
Keywords: GNSS, Simulation, Accuracy, Reliability
1. INTRODUCTION
The conventional geomatics industry including mapping and surveying applications has been revolutionized with the use of GPS, which is the best known, and currently fully operational satellite based navigation system operated by USA (Parkinson and Spilker, 1996). Almost simultaneously, Russia also operates its own satellite based navigation system called GLONASS. Fuelling growth in the coming
decade will be next generation satellite based navigation systems that are currently being developed. The USA has been modernizing GPS in order to retain its superiority in satellite based navigation technologies since 2000 (McDonald, 2002). In order to keep up with USA’s progress in building next generation system, Russia is taking serious steps to modernize GLONASS as well (FSARF, 2005). The GPS and GLONASS signals are free but their availability is not
Received Date: Mar. 18, 2008 Revised Date: May. 19, 2008 Accepted Date: J u n. 09, 2008 1Master candidate, Department of Geomatics, National Cheng KungUniversity
2Assistant Professor, Department of Geomatics, National Cheng KungUniversity
3Professor, Department of Geomatics, National Cheng Kung University
4Commissioner, Technology Development Section, National Land Surveying and Mapping Center, Ministry of the Interior
Journal of Photogrammetry and Remote Sensing Volume 13, No. 1, March 2008 58
guaranteed and currently most users are taking the risk (Parkinson and Spilker, 1996). In addition, Europe develops the navigation system called Galileo. In all, these systems form the mainframe of Global Navigation Satellite Systems (GNSS) (McDonald, 2002). Unlike GPS and GLONASS, Galileo will also offer a guaranteed service to users who are willing to pay for it in addition to a free signal similar to that of GPS (Open Service – OS, and Safety of Life service – SoL). Galileo will be available to the public in 2012 (EC, 2003).
Despite many technical differences between those GNSS systems, the commonality of the carrier frequencies between GPS and Galileo creates the potential for the future development of an interoperable GNSS receiver.
Comparing to those pricy hardware GNSS simulators, high-accuracy software simulators are a cost-effective and precise tool to evaluate the specific performance indices attainable from the future GNSS, and have been recognized as an appropriate pre-development tool for satellite navigation systems and applications in Canada and European countries. In addition, the entire hardware simulators available on the market can only emulate the signals from a single system at the present time. On the other hand, a dual systems simulator is easier to implement in the software level. The technical benefits of this approach lie in the fact that the software simulations are reproducible and totally controlled, and parameters can be changed individually if necessary for an in-depth understanding of the underlying effects.
Considering the compatibilities and interoperabilities between GPS, Galileo, and GLONASS, the implementation in receiver design and processing software for GPS/Galileo integrated system would be an easy and cost
effective choice for most of geomatics communities (Richard, 2005). Therefore, this article first introduces recent developments in future GNSS including GPS, GLONASS and Galileo then a qualitative assessment of the specific performance indices (i.e., satellite visibility and Dilution of Precision, DOP) of the future GPS/Galileo integrated infrastructure around the Taiwan area using a multi-system software simulation toolkit being developed;
consequently, representative results over Taiwan are demonstrated.
2. EVOLOVING GNSS: FROM GPS TO FUTURE
MULTI-SYSTEM GNSS
2.1 GPS Modernization
Motivated by the United States Department of Defense (DoD), the current GPS has experienced three decades’ development.
Although the original motivation was only for military purposes, GPS has been widely used in civilian applications during the past few decades.
However, the integrity, availability, and accuracy still need further improvement for various applications. For the surveying industry, applications can be classified according to the achievable accuracy. Therefore, a GPS modernization program was initiated in the late 1990’s, in an attempt to upgrade GPS performance for both civilian and military applications. The GPS modernization program started with the cancellation of SA in 2000. It is followed by the addition of a new a second civil code on L2 (L2C), then a third civil frequency L5.
Further modernization consists of the assessment and design of a new generation of satellites to
meet military and civil requirements through 2030.
2.2 GLONASS
GLONASS was originally deployed as the Soviet Union’s answer to GPS. The design of GLONASS is very similar to GPS except that each satellite broadcasts its own particular frequency with the same codes (this is known as a FDMA, or Frequency Division Multiple Access, scheme), while GPS satellites broadcast the same frequencies and a receiver differentiates between satellites by recognizing the unique code broadcast by a given satellite (this is known as a CDMA, or Code Division Multiple Access, scheme). Current activity centers on launching GLONASS-M satellites with an improved 7-year design lifetime, which will broadcast in the L1 and L2 bands (though not on the same frequencies as GPS). From 2007 to 2008 it is planned to launch GLONASS-K satellites with improved performance, which will also transmit a third civil signal known as L3 (not the same frequency as GPS’s L5). The stated intention is to achieve a full 24 satellite constellation transmitting the two civil L1 and L2 signals by 2010. The full
constellation is planned to be broadcasting three sets of civil signals by 2012 (FSARF, 2005).
2.3 Galileo
The development of the Galileo system consists of three phases. During the first phase (2001 to present), the mission requirements were consolidated, the satellites and ground based components were under developed, and the overall in-orbit validation (IOV) of Galileo was started. IOV includes the delivery of the first four satellites in the Galileo constellation of 30, along with a number of ground control and monitoring stations. The first launch of Galileo satellites (GIOVE-A) was at the end of 2005. Now it is on the very edge to the second phase – deployment phase (before 2012), which covers the entire network of ground infrastructure and the launch of the remaining 26 satellites; then in the third phase starting from 2012, the whole system will become commercially operational, although these dates may slip a year or two. The latest launch for second test satellite (GIOVE-B) will be set for the third quarter of 2007, however, no specific launch date is available yet (cf., www.space.com). Table 1 illustrates the comparison between their system parameters, respectively.
Table 1 The comparison between future GNSS
GPS Galileo GLONASS
No. of SV (2015) 28 30 26
Orbital plane 6 3 3
Inclination (Degree) 55 56 64.9
Altitude(Km) 20200 19100 23230
Period 11h56m 11h15m 14h05m
Frequencies (Civil use) L1:1575.42MHz L2:1227.60MHz L5:1176.45MHz
E1:1575.42MHz E5b:1207.14MHz E5a:1176.45MHz
G1:1602~1616MHz G2:1246~1257MHz 3rd:undefined
Coordinate frame WGS-84 GTRF PZ-90
Time system GPST GST UTC(SU)
Coding CDMA CDMA FDMA
Journal of Photogrammetry and Remote Sensing Volume 13, No. 1, March 2008 60
3. PERFORMANCE EVLUATION INDICES
3.1 Observation model
The future GNSS observation model is considered as the basis of the performance evaluation. It is available and extensively used for all kind of high-precision applications, ranging from geodesy and navigation to geophysics (Verhagen and Joosten, 2003). The general form of all GNSS models for a single epoch can be written as (Verhagen and Joosten, 2003):
{ } ( )
⎟⎟⎠
⎜⎜ ⎞
⎝
= ⎛
a N b M y
E ;D
{ }
y =Qy (1)where E
{ }
y andD{ }
y are the expectation and dispersion operators. The double difference code and carrier phase observations are collected in is the vector y. The functional relationship between the observations and the unknown parameters is captured by the matrices M and N. The real-valued unknown parameters, including the baseline unknowns are denoted with the vector b.The unknown integer ambiguities is denoted with the vector a. The variance-covariance is described by the matrix Qy.
In the equation (1), we will discuss with the roving receiver model for short to medium baseline lengths and for short time spans. This implies that the baseline unknowns will change every epoch, however, it is assumed that the satellite geometry does not change. The model for k epochs can be written as (Verhagen and Joosten, 2003):
{ } ( )
⎟⎟⎠
⎜⎜ ⎞
⎝
⊗ ⎛
⊗
= a
N b e M I y
E k k k k
;
D{ }
yk =Ik⊗QyWhere⊗is the Kronecker product. We can find in the equation (2) that the ambiguities will not change in time, and it is assumed that the observations are not correlated in time.
Any GNSS user can use the general model as described above. The system’s structure is independent of the number frequencies. If the ionosphere weighted model is considered, correlation between the different observation types on the different frequencies will be introduced. Because of different signal characteristics for the integrated GPS/Galileo system, the equation (1) can be rewritten as:
⎟⎟
⎟
⎠
⎞
⎜⎜
⎜
⎝
⎛
⎟⎟⎠
⎜⎜ ⎞
⎝
=⎛
⎭⎬
⎫
⎩⎨
⎧
2 1 2 2
1 1 2 1
a a b N M
N M y
E y ⎟⎟⎠
⎜⎜ ⎞
⎝
=⎛
2 1
Q
Qy Q
(3)
where the sub-indices refer to the two systems: 1 to GPS, 2 to Galileo. It is assumed that the receivers will be able to receive the measurements of both systems independently.
3.2 Availability and accuracy
Availability usually refers to the number of satellites or other ranging signals available to the user. The definition of availability from the US Federal Radionavigation Plan (FPR) refers to the percentage of the time a system is able to provide the user with navigation solutions.
Accuracy is a measure of how close the navigation solution provided by the system is to the user’s true location and velocity. Generally, the accuracy of the system can be expressed by the User equivalent range error (UERE) and the dilution of precision (DOP). UERE is obtained by mapping all of the system and user errors into a single error in one user measured range. DOP is obtained by the satellite geometry and times.
When we compute the DOP and UERE, we can maps the UERE into user accuracy. Then we can (2)
obtain user accuracy in any region(O’Keefe, 2001).
DOP can be classified into constituents parts, namely position, horizontal position, vertical position, and time : PDOP, HDOP, VDOP, and TDOP respectively. DOP values are good measures of the system availability as they represent the geometric strength of the solution. If all observations have the same UERE, DOP values can also be used to represent the system accuracy. Most of the users hope using GNSS to obtain the horizontal position. SO HDOP is usually used as a measure to represented availability and accuracy,
3.3 Internal and external reliability
The reliability can be divided in two parts.
One is internal reliability, and the other is external reliability. The internal reliability of a system can be represented by minimal detectable bias (MDB).
The MDB describes the size of model errors that can be detected by using the appropriate test statistics. The MDB can be written as (Baarda, 1967; Teunissen, 1998):
c P Q cT y− A⊥
=
∇ 1
λ
0where c specifies the model error. λ0 is the non-centrality parameter which depends on chosen values of the confidence level α0 and detection power γ0. PA⊥=I−PA=I−A(ATQy−1A)−1ATQy−1
with PA the orthogonal projector on the range space of the design matrix A. It can be seen that MDB depends on α0 and γ0, but also on the functional and stochastic model as described by the design matrix A and covariance matrix Qy.
The MDB describes the size of model errors that can be detected. However, we will be more interested in the external reliability, since it gives
the impact of unmodeled errors on the unknown parameters. The estimated parameters is defined as (Verhagen, 2005):
∇
=
∇
=
∇xˆ (ATQy−1A)−1ATQy−1c QxˆATQy−1c
The above equation is an n-vector, it may be hard to explain the result. Therefore, it can use a dimensionless scalar quantity which does not depend on the parameterization. It is given by:
2 2
2
ˆ 1 1 1 1
ˆ
ˆ
−= ∇
−= ∇
−− ∇
−∇
=
⊥y y y
x A Q Q A Q
x xQ Pc c P c
λ
where the square root of
λ
X) is called bias-to-noise ratio (BNR). The larger the BNR, the greater the influence of a bias on the estimated parameters.For the GPS model the unknowns x are the baseline coordinates b and the integer ambiguities a. We are interested in the influence of an undetected bias on the baseline unknowns.
Therefore, we can subtract the equation as following:
0 2 2
ˆ
λ λ
0 1 1λ
λ
= − − ∇ − = ⊥ ∇ − −y y K
k Q N Q
N
b y P c P c
with NK =eK ⊗N , where ⊗ is Kronecker product.
Another method that is usually used to describe the external reliability is the minimal detectable effect (MDE). We will account for the MDE on the position now. It is computed as (Verhagen, 2005):
⎟ ⎟
⎠
⎞
⎜ ⎜
⎝
⎛
∇
= ∇
∇ a
x b
ˆ
ˆ ˆ
where
∇
bˆ is the bias in the float baseline solution and∇
aˆ is the bias in the float ambiguity solution. We can see that the external reliability as represented by the MDE is given by a vector from the equation (8). Thereby comes that we are mainly interested in the baseline(6)
(7) (5)
(4)
(8)
Journal of Photogrammetry and Remote Sensing Volume 13, No. 1, March 2008 62
unknowns. Therefore, it might be used to compute the distance to the ‘true’ position, which we will call the minimal detectable position effect (MDOE) by the following equation.
2 3 2 2 2
1
ˆ ˆ
ˆ
b bb
MDPE
= ∇ + ∇ + ∇
with∇
bˆi are the entries of the position unknowns.According the above describing, if the values of the PDOP, MDB or MDE is decrease by using the GNSS software simulator, the positioning accuracy, reliability and efficiency can further be enhanced.
4. SIMULATION RESULTS
This section describes the performance analysis by using the GNSS software simulator developed in the department of Geomatics, NCKU. Figure 1, Figure 2, and Figure 3 show the values of PDOP with GPS, Galileo, and GPS/Galileo system in Taiwan region. The simulation time sets from AM 00:00, January 1st, 2007 to AM 00:00 January 2nd, 2007. The time interval sets 300 seconds. The simulation region is 21N to 26N, 119E to 123E. The resolution is 0.01 degree and the cutoff angle is 10 degree. We can find that the PDOP with GPS, Galileo, and GPS/Galileo are 1.5 to 1.75, 1.74 to 1.9, and 1.12 to 1.26, respectively. As the result, GPS/Galileo integrated system has better PDOP values than stand alone GPS or Galileo system. It enhances the ratio 27% and 35% respectively. Because we can obtain more visibility of satellites by GPS/Galileo integrated system, the positioning accuracy can improve. However, DOP values is decided with the distribution of the satellites and times, we can see that the distribution of GPS is better than Galileo.
PDOP - GPS
119 119.8333 120.6667 121.5 122.3333
21 21.8333 22.6667 23.5 24.3333 25.1667 26
1.5 1.55 1.6 1.65 1.7 1.75
Figure 1. PDOP with GPS
PDOP - Galileo
119 119.8333 120.6667 121.5 122.3333
21 21.8333 22.6667 23.5 24.3333 25.1667 26
1.74 1.76 1.78 1.8 1.82 1.84 1.86 1.88 1.9
Figure 2. PDOP with Galileo
PDOP - GPS+Galileo
119 119.8333 120.6667 121.5 122.3333
21 21.8333 22.6667 23.5 24.3333 25.1667 26
1.12 1.14 1.16 1.18 1.2 1.22 1.24 1.26
Figure 3. PDOP with GPS/Galileo (9)
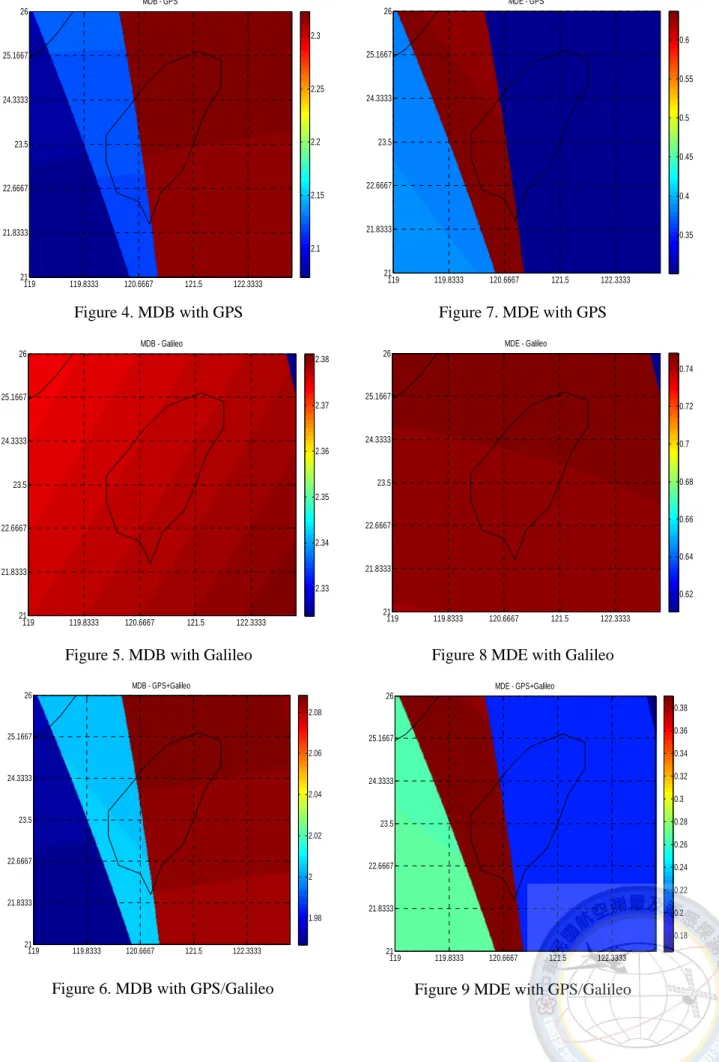
Figure 4, Figure 5, and Figure 6 show the values of MDB with GPS, Galileo, and GPS/Galileo system in Taiwan region. We can find that the MDB with GPS, Galileo, and GPS/Galileo are 2.1 to 2.3, 2.33 to 2.38, and 1.98 to 2.08, respectively.
As the result, GPS/Galileo integrated system has better MDB values than stand alone GPS or Galileo system. It enhances the ratio 8% and 14%
respectively. We can find that the ability of detecting the size of model errors by GPS is better than Galileo.
Figure 7, Figure 8, and Figure 9 show the values of MDE with GPS, Galileo, and GPS/Galileo system in Taiwan region. We can find that the MDE with GPS, Galileo, and GPS/Galileo are 0.35 to 0.6, 0.62 to 0.74, and 0.18 to 0.38, respectively. As the result, GPS/Galileo integrated system has better MDE values than stand alone GPS or Galileo system. We can find that the impact of unmodeled errors on the unknown parameters by GPS is better than Galileo.
5. CONCLUSION
From this paper we can obtain the indices to evaluate the performance of the future GNSS system by using the traditional equations of the GNSS software simulator. We can easily introduce the designed methods and compare the different between any systems. As the result, the future GNSS including stand alone modernized GPS, Galileo or GPS/Galileo integrated system will support more satellites, more observable frequencies and better signal quality comparing to current GPS. Therefore, the positioning accuracy, reliability and efficiency can further be enhanced.
We can see the values of the PDOP, MBD or MDE is decrease by using integrated GPS/Galileo system in section four, so the positioning
accuracy, reliability and efficiency can further be enhanced. Most importantly, the integrated GPS/Galileo system provides sufficient number of satellites for navigation in extreme masking environments.
REFERENCES
Baarda, W., 1967. Statistical concepts in geodesy, Netherlands Geodetic Commission, Netherlands.
EC, 2003, The Galilei project: GALILEO Design Consolidation, Online available at:
http://europa.eu.int/comm./dgs/energy_trans port, European Commission.
FSARF, 2005. GLONASS: Status and Perspectives, Federal Space Agency for the Russian Federation, Munich.
McDonald, K. D., 2002. The Modernization of GPS: Plans, New Capabilities and the Future Relationship to Galileo, Global Position System 1(1): 1-17.
O’Keefe K., 2001. Availability and Reliability Advantages of GPS/Galileo Integration, ION GPS 2001.
Parkinson, B. W. and J. J. Spilker, 1996. Global Positioning System: Theory and Applications, American Institute of Aeronautics and Astronautics, Washington, D.C..
Richard, T., 2005. The Impact of Future Global Navigation Satellite Systems on Precise Carrier Phase Positioning, Department of Geomatics Engineering, University of Calgary, Calgary, Canada.
Teunissen, P. J. G., 1998. Minimal detectable biases of GPS data, Journal of Geodesy 72:
236-244.
Verhagen, S. and P. Joosten, 2003. Algorithms for design computations for integrated GPS – Galileo, GNSS 2003.
Verhagen, S., 2005. The GNSS integer mbiguities:
estimation and validation, TU Delft.
Journal of Photogrammetry and Remote Sensing Volume 13, No. 1, March 2008 64
MDB - GPS
119 119.8333 120.6667 121.5 122.3333
21 21.8333 22.6667 23.5 24.3333 25.1667 26
2.1 2.15 2.2 2.25 2.3
Figure 4. MDB with GPS
MDB - Galileo
119 119.8333 120.6667 121.5 122.3333
21 21.8333 22.6667 23.5 24.3333 25.1667 26
2.33 2.34 2.35 2.36 2.37 2.38
Figure 5. MDB with Galileo
MDB - GPS+Galileo
119 119.8333 120.6667 121.5 122.3333
21 21.8333 22.6667 23.5 24.3333 25.1667 26
1.98 2 2.02 2.04 2.06 2.08
Figure 6. MDB with GPS/Galileo
MDE - GPS
119 119.8333 120.6667 121.5 122.3333
21 21.8333 22.6667 23.5 24.3333 25.1667 26
0.35 0.4 0.45 0.5 0.55 0.6
Figure 7. MDE with GPS
MDE - Galileo
119 119.8333 120.6667 121.5 122.3333
21 21.8333 22.6667 23.5 24.3333 25.1667 26
0.62 0.64 0.66 0.68 0.7 0.72 0.74
Figure 8 MDE with Galileo
MDE - GPS+Galileo
119 119.8333 120.6667 121.5 122.3333
21 21.8333 22.6667 23.5 24.3333 25.1667 26
0.18 0.2 0.22 0.24 0.26 0.28 0.3 0.32 0.34 0.36 0.38
Figure 9 MDE with GPS/Galileo
GNSS 於台灣地區精度與可靠度分析
蔡孟倫
1江凱偉
2楊名
3陳鶴欽
4摘要
全球導航衛星系統(Global Navigation Satellite System, GNSS)性能指標可區分為可得度(availability)、精度 (accuracy)、完好度(integrity)及可靠度(reliability)。未來現代化 GPS、Galileo 之單一衛星導航系統或整合 GPS 與 Galileo 的雙系統多頻衛星導航系統,將會提供較現有 GPS 系統加倍的衛星、更多的測量頻率、以及更 好的訊號品質,從而進一步提昇現有 GPS 衛星定位的精度、可靠度、以及效率。這點對測量界的使用者 是相當重要的。由於 GPS 與 Galileo 具備較高之相容性且未來 GPS 之 L1/L5 會與 Galileo 之 E1/E5b 具備相 同之頻率。故預期未來基於成本之考量,雙系統雙頻的 GNSS 會成為測量等級 GNSS 接收機設計之主流。
故本研究擬利用自行研發的 GNSS 模擬器針對未來 GPS/ Galileo 整合式定位系統在台灣地區的三維定位精 度分佈、內可靠度(internal reliability)及外可靠度(external reliability)進行評估與分析。
關鍵詞:全球導航衛星系統、模擬器、精度(accuracy)、可靠度(reliability)
1國立成功大學測量及空間資訊學系碩士生
2國立成功大學測量及空間資訊學系助理教授
3國立成功大學測量及空間資訊學系教授
4內政部國土測繪中心技術發展科科長
收到日期:民國 97 年 03 月 18 日 修改日期:民國 97 年 05 月 19 日 接受日期:民國 97 年 06 月 09 日